三相异步电动机的实验设计
三相异步电动机控制实训参考资料
实训一三相异步电动机接触器点动控制实训一三相异步电动机接触器点动控制一、训练目的1.通过观察实物,熟悉按钮和接触器的结构和使用方法.2.通过实践,掌握具有短路保护的点动控制电路安装接线与检测方法。
3.掌握使用万用表检查电路的方法。
二、操作所需电器元件代号名称型号、规格数量备注QS 低压断路器DZ108—20/10-F 1个FU1 螺旋式保险丝RL1-15/3A 3个FU2 直插式保险丝RT14-20 2个KM 交流接触器LC1-D0610Q5N 1个SB 按钮开关LAY16 黑色1个按钮开关盒2位1个M 三相鼠笼式异步电动机WDJ26(380V/△)1台XT 端子排JF5-2。
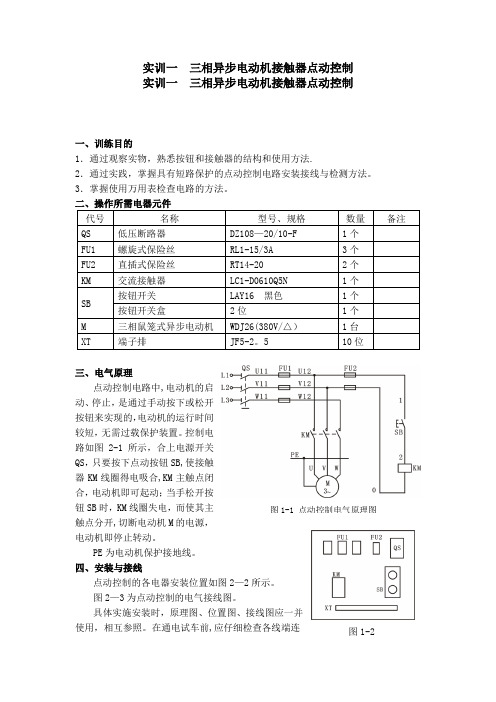
5 10位三、电气原理点动控制电路中,电动机的启动、停止,是通过手动按下或松开按钮来实现的,电动机的运行时间较短,无需过载保护装置。
控制电路如图2-1所示,合上电源开关QS,只要按下点动按钮SB,使接触器KM线圈得电吸合,KM主触点闭合,电动机即可起动;当手松开按钮SB时,KM线圈失电,而使其主触点分开,切断电动机M的电源,电动机即停止转动。
PE为电动机保护接地线。
四、安装与接线点动控制的各电器安装位置如图2—2所示。
图2—3为点动控制的电气接线图。
具体实施安装时,原理图、位置图、接线图应一并使用,相互参照。
在通电试车前,应仔细检查各线端连图1-2图1-1 点动控制电气原理图接是否正确、可靠,并用万用表的欧姆档检查控制回路是否短路或开路(按下起动控制按钮时,控制电路的两端电阻应为吸引线圈的直流电阻)、主电路有无开路或短路等.图1-3 点动控制电路接线图实训二三相异步电机接触器自锁控制线路在点动控制的电路中,要使电动机转动,就必须用手按住按钮不放,这不适合电动机长时间连续运行的控制场合,而必需具有接触器自锁的控制电路。
一、操作所需电器元件代号名称型号规格数量备注QS 低压断路器DZ108—20/10—F1FU1 螺旋式熔断器RL1-15 配熔体3A 3 FU2 直插式保险丝RT14—20 配熔体2A 2 KM 交流接触器LC1-D0610Q5N 线圈电压AC380V 1FR热继电器LR2-D1305N 整定范围0.63-1A 1整定值0.63A 热继电器座LA7—D1064 1SB1 按钮开关LAY16 红色 1 SB2 按钮开关LAY16 绿色 1 按钮开关盒2位 1 XT 接线端子排JF5-2。
三相异步电动机Y△起动PLC控制程序的设计与调试实验

三相异步电动机Y/△起动PLC控制程序的设计与调试
一、实验目的
1、熟悉PLC的I/O分配和连接方法。
2、进一步熟悉PLC的基本逻辑指令及其使用。
3、掌握PLC应用程序的设计与调试方法。
4、掌握PLC定时器的使用方法。
二、实验仪器
电气控制实验装置 1台
电动机 1 台;
万用表 1只
电工工具及导线若干
计算机1台
FX2N可编程序控制器 1台
三、实验内容及要求
1、实验内容:
1) 三相异步电动机Y/△起动控制程序设计与调试。
要求采用时间控制原则
进行控制程序设计。
2) 修改定时器的时间设定值,观察不同的时间对电动机控制性能的影响。
2、实验要求:
1) 运用经验设计法设计PLC控制程序。
2) 在FX-PCS-WIN3.0(三菱PLC梯形图编辑、调试集成环境)环境下进行
控制程序的编辑与调试。
3) 记录在调试程序过程中出现的问题,并分析产生的原因。
四、思考题
1、实现一个控制,程序的编写方式是否唯一?请谈谈体会。
2、可编程序控制器的定时器均为接通延时型,若需要分断延时型定时器怎么办?扩大延时范围有几种方法?
3、PLC控制系统与传统继电器控制系统的主要区别是什么?
五、实验报告要求
1、实现三相异步电动机Y/△起动控制的PLC控制系统的I/O分配表。
2、实现三相异步电动机Y/△起动控制的PLC控制系统的硬件接线图、
2、采用PLC实现三相异步电动机Y/△起动控制的程序清单。
3、记录实验中发现得问题、错误、故障及解决方法。
《机电设备控制技术》实验教案
《机电设备控制技术》实验教案机电工程学院电气工程系实验一、三相异步电动机正反转控制线路一、实验目的(1)了解三相异步电动机接触器的正反转控制的接线。
(2)理解电气联锁和自锁的概念。
(3)掌握三相异步电动机接触器的正反转控制的基本原理与实物连接的要求。
二、实验原理三相异步电动机的旋转方向是取决于磁场的旋转方向,而磁场的旋转方向又取决于电源的相序,所以电源的相序决定了电动机的旋转方向。
任意改变电源的相序时,电动机的旋转方向也会随之改变。
三、实验器材三相异步电动机(M 3~)、万能表、联动空气开关(QS1)、单向空气开关(QS2)、交流接触器(KM1,KM2)、组合按钮(SB1,SB2,SB3)、端子排7副、导线若干、螺丝刀等。
四、实验操作步骤1、连接三相异步电动机原理图,如图1、图2所示。
其中,线路中的正转用接触器KM1和反转用的接触器KM2,分别由按钮SB2和反转按钮SB2控制。
控制电路有两条,一条由按钮SB1和KM1线圈等组成的正转控制电路;另一条由按钮SB2和KM2线圈等组成的反转控制电路。
2、当按下正转启动按钮SB1后,电源相通过空气开关QS1,QS2和停止按钮SB3的动断接点、正转启动按钮SB1的动合接点、接触器KM和其他的器件形成自锁,使得电动机开始正转,当按下SB3时,电动机停止转动,在按下SB2时,接触器KM和其他的器件形成自锁反转。
3、完成电动机的正反转控制线路与接线。
要求:线路设计要求考虑自锁控制环节、双重互锁控制环节,如图3所示。
图1 电动机的正反转控制线路图2 主电路连线图图3 控制电路连线中的双重联锁五、控制接线要求1、在连接控制实验线路前,应先熟悉各按钮开关、交流接触器、空气开关的结构形式、动作原理及接线方式和方法。
2、在不通电的情况下,用万用表检查各触点的分、合情况是否良好。
检查接触器时,特别需要检查接触器线圈电压与电源电压是否相符。
3、将电器元件摆放均匀、整齐、紧凑、合理,并用螺丝进行安装,紧固各元件时应用力均匀,紧固程度适当。
三相异步电动机的实验设计

K e wo d as nc o us m o o y r s: y hr no t r;e pe i e s g x rm ntde i n;s m ulto i ain
现 在 , 来越 多 的 实验 课 都 采 用将 计 算 机 仿 真 越 和 实际实 验相 结合 的方式 l 。为 了使 仿真 结果 更接 _ 】 ]
摘 要 : 文 提 出 了 包 括实 验 、 真 和 再 实 验 的 三 步 实 验课 授 课 方 法 。通 过 首 次 实 验 获 取 三 相 异 步 电 动机 模 型 的参 数 , 后 利 用 获 取 的 参 数 建 本 仿 随
立仿真模型并进行仿真 , 这样 , 最 后 阶段 的 实 验 中 , 以 获 得更 准确 更 丰 富的 实 验 结 果 。 实 践 表 明 , 步 实 验 授 课 方 法 收 到 了 显 著 的 实 验 效 在 可 三 果 , 可推 广 应 用 于 相 关 电 气 类课 程 实验 。 并
( c o l f E etia g n e ig, l n U i est f T c n lg S h o o lcrc l En i ern Da i n v ri o eh o o y,D l n 1 6 2 , ia a y a i 1 0 3 Chn ) a
Ab ta t A t e — t p sr c : hr e s e m e ho i c ud n e pe i e t sm u a i a r — x rm e t s t d n l i g x rm n , i l ton nd e e pe i n i pr p e i t s o os d n hi
关键 词 : 步 电动 机 ; 验 设计 ; 真 实 验 异 实 仿 中 图 分类 号 : 2 . 1 TM3 3 2 G4 4 3 ; 4 . 文献 标 识 码 : B 文 章 编 号 :0 8 0 8 ( 0 1 0 — 0 2 0 1 0 — 6 6 2 1 ) 20 5 — 3
三相异步电动机点动实验报告
三相异步电动机点动实验报告三相异步电动机点动实验报告引言:三相异步电动机是工业生产中最常见的电动机之一,它具有结构简单、可靠性高、运行平稳等优点。
本实验旨在通过对三相异步电动机的点动实验,深入了解其工作原理和性能特点。
一、实验目的本实验的目的是通过点动实验,观察三相异步电动机在不同电压和负载条件下的运行情况,探究其起动特性和负载能力。
二、实验装置和方法1. 实验装置:本实验采用了一台三相异步电动机、电源、电压表、电流表和负载装置。
2. 实验方法:(1)首先,将电动机与电源连接,确保电动机的三个绕组分别与电源的三个相线相连。
(2)然后,将电流表和电压表分别连接到电动机的一个相线上,以测量电流和电压的数值。
(3)在电动机的负载轴上加上适当的负载,以模拟实际工作情况。
(4)通过调节电源电压,逐渐增加电动机的电压,观察电动机的起动状况和运行情况。
(5)记录不同电压和负载下的电流和电压数值。
三、实验结果与分析1. 起动特性:通过实验观察,我们发现三相异步电动机的起动需要较大的起动电流,随着电压的增加,起动电流逐渐减小。
这是因为在起动过程中,电动机需要克服转子的惯性和摩擦力,所以起动时需要更大的电流来提供足够的扭矩。
2. 负载能力:在实验中,我们逐渐增加了电动机的负载,观察到电动机的电流和电压随负载的增加而增加。
这是因为负载的增加会导致电动机需要提供更大的扭矩来克服负载的阻力,从而产生更大的电流。
3. 电流和电压关系:通过实验记录的数据,我们可以绘制电流和电压之间的关系曲线。
从曲线上可以看出,电流和电压之间存在一定的线性关系。
当电压增加时,电流也相应增加,但增加的速度逐渐减缓。
四、实验结论通过本次实验,我们对三相异步电动机的起动特性和负载能力有了更深入的了解。
实验结果表明,三相异步电动机的起动需要较大的起动电流,随着电压的增加,起动电流逐渐减小。
同时,电动机的负载能力与电流和电压呈正相关关系。
这些实验结果对于电动机的设计和使用具有一定的指导意义。
三相异步电动机毕业设计

三相异步电动机毕业设计三相异步电动机毕业设计在电机领域,三相异步电动机是一种常见且重要的设备。
它广泛应用于工业、农业、交通等领域,是现代社会不可或缺的动力源。
本文将探讨三相异步电动机的毕业设计,包括设计背景、设计目标、设计方法和设计结果等方面。
一、设计背景三相异步电动机是一种通过电磁感应原理工作的电动机。
它的工作原理是利用电流在绕组中产生的磁场与定子磁场相互作用,产生转矩从而驱动机械设备。
在工业生产中,三相异步电动机通常用于驱动各种负载,如泵、风机、压缩机等。
因此,设计一台性能稳定、效率高的三相异步电动机对于提高生产效率和降低能源消耗具有重要意义。
二、设计目标本次毕业设计的目标是设计一台额定功率为5千瓦的三相异步电动机。
通过合理的设计和优化,实现以下目标:1. 提高电机的效率:通过选用合适的磁材料和绕组结构,减小电机的铜耗和铁耗,提高电机的效率。
2. 提高电机的起动性能:通过设计合理的起动装置,减小电机的起动电流,提高电机的起动性能。
3. 提高电机的负载能力:通过优化电机的结构和材料,提高电机的承载能力,使其能够适应更大的负载。
三、设计方法为实现上述目标,本设计采用了以下方法:1. 磁路设计:根据电机的额定功率和转速要求,选择合适的磁材料和磁路结构,以减小磁场损耗和铁耗。
2. 绕组设计:通过合理的绕组设计,减小电机的铜耗和电阻,提高电机的效率。
3. 起动装置设计:采用软起动器等起动装置,减小电机的起动电流,提高电机的起动性能。
4. 结构优化:通过优化电机的结构和材料,提高电机的负载能力,使其能够适应更大的负载。
四、设计结果经过设计和优化,本次毕业设计成功地设计出了一台额定功率为5千瓦的三相异步电动机。
该电机具有高效率、良好的起动性能和较大的负载能力。
实验结果表明,该电机的效率达到了90%以上,起动电流小于额定电流的1.5倍,能够承载额定负载的1.2倍。
五、总结通过本次毕业设计,我深入学习了三相异步电动机的原理和设计方法。
三相异步电动机实验报告
三相异步电动机实验报告三相异步电动机实验报告引言:三相异步电动机是一种常见的电动机类型,广泛应用于各个领域。
本实验旨在通过实际操作和数据分析,深入了解三相异步电动机的工作原理和性能特点。
实验目的:1. 掌握三相异步电动机的基本结构和工作原理;2. 了解三相异步电动机的性能参数及其测量方法;3. 分析电动机的效率、功率因数和转矩特性。
实验设备和材料:1. 三相异步电动机2. 电动机控制器3. 电压表和电流表4. 功率因数表5. 转矩表6. 电源实验步骤:1. 连接电动机控制器和电源,确保电源电压和频率符合电动机的额定要求。
2. 将电动机轴与负载轴连接,确保转动灵活。
3. 分别测量电动机的电压、电流、功率因数和转矩,并记录数据。
4. 根据测得的数据,计算电动机的效率、功率因数和转矩特性。
实验结果和分析:1. 电动机的电压和电流测量结果显示,随着电压的增加,电流也相应增加,符合电动机的特性。
2. 功率因数是衡量电动机负载能力的重要指标,实验结果显示,电动机的功率因数随负载增加而降低。
3. 转矩是电动机输出功率的关键参数,实验结果显示,转矩与负载之间存在线性关系,随着负载增加,转矩也相应增加。
4. 通过计算,得到电动机的效率,发现电动机在额定负载下效率最高,随着负载增加或减少,效率都会降低。
结论:通过本次实验,我们对三相异步电动机的工作原理和性能特点有了更深入的了解。
电动机的电压、电流、功率因数和转矩等参数对其工作性能有重要影响。
在实际应用中,需要根据具体要求选择合适的电动机,并合理控制电压和负载,以提高电动机的效率和性能。
展望:在今后的学习和研究中,我们将进一步深入探索三相异步电动机的工作原理和性能特点。
通过更多的实验和数据分析,提高对电动机的理解和应用能力,为电动机的优化设计和应用提供更多的参考和支持。
电工实验报告—异步电动机
实验三 三相鼠笼异步电动机一、 实验目的 1. 熟悉三相鼠笼式异步电动机的结构和额定值。
2. 学习检查异步电动机绝缘情况的方法。
3. 学习三相异步电动机定子绕组首、末端的判别方法。
4.掌握三相鼠笼式异步电动机的启动和反转方法。
二、 原理说明 1.三相鼠笼式异步电动机的结构异步电动机是基于电磁原理把交流电能转换为机械能的一种旋转电机。
三相鼠笼式异步电动机的基本结构有定子和转子两大部分。
定子主要有定子铁芯、三相对称定子绕组和机座等组成,是电动机的静止部分。
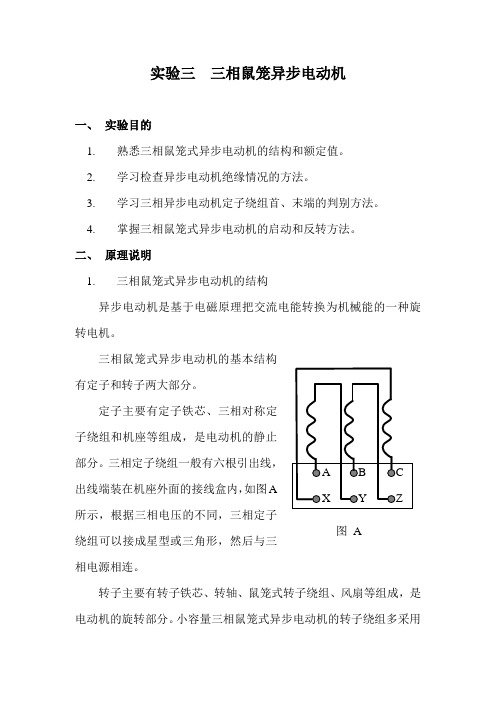
三相定子绕组一般有六根引出线,出线端装在机座外面的接线盒内,如图A 所示,根据三相电压的不同,三相定子绕组可以接成星型或三角形,然后与三相电源相连。
转子主要有转子铁芯、转轴、鼠笼式转子绕组、风扇等组成,是电动机的旋转部分。
小容量三相鼠笼式异步电动机的转子绕组多采用图 A铝浇铸而成,冷却方式一般为扇冷式。
2.三相鼠笼式异步电动机的铭牌三相式异步电动机的额定值标记在电动机的铭牌上,如下表所示为本实验装置三相鼠笼式异步电动机铭牌。
3.三相鼠笼式异步电动机的检查电动机使用前应作必要检查 (1) 机械检查检查引出线是否齐全、牢靠;转子转动是否灵活、匀称、有否异常声响等。
(2) 电气检查a. 用兆欧表检查电机绕组间及绕组与机壳之间的绝缘性能电动机的绝缘电阻可以用兆欧表进行测量。
对额定压1KV 以下的电动机,其绝缘电阻最低不小于1000Ω/V 。
b. 定子绕组首、末端判断 4.三相鼠笼式异步电动机的启动三相鼠笼式异步电动机的直接启动电流可以达到额定电流的4~7图 B倍,但持续很短,不至于引起电机过热而烧坏。
但对容量过大的电动机,直接启动会引起电网电压下降而影响其他电器的使用,通常采取星型换三角型启动方法,它可使电流降低为直接启动电流的1/3。
5.三相鼠笼式异步电动机的反转异步电动机的旋转方向取决于三相电源接入定子绕组的相序,故只要改变三相电源与定子绕组联接的相序就可使电动机改变旋转方向。
三相异步电动机的起动与调速实验报告
三相异步电动机的起动与调速实验报告实验报告:三相异步电动机的起动与调速引言:一、实验目的:1.了解三相异步电动机的起动原理;2.熟悉三相异步电动机的转子启动方法;3.掌握三相异步电动机的调速控制原理;4.实验验证电压调制调速与变频器调速的效果。
二、实验仪器与设备:1.三相异步电动机;2.电动机启动电容器;3.电源;4.变压器;5.变频器。
三、实验原理:1.三相异步电动机的起动原理:三相异步电动机的起动有直接启动和间接启动两种方法。
直接启动是将电动机直接连接到电源上,通过电流大小的限制和时间延迟来确保电动机的安全起动。
间接启动是通过在电动机的主回路中加入启动电容器来增加电动机的起动转矩,使电动机能够正常起动。
2.三相异步电动机的调速原理:四、实验步骤与结果:1.实验起动部分:(1)将电动机的U、V、W三相绕组分别与电源的U、V、W相连接;(2)通过开关将电容器接入电动机的主回路;(3)按下启动按钮,记录电动机的起动时间;(4)重复实验3次,取平均值。
2.实验调速部分:(1)使用电压调制调速方法,通过改变电源的电压大小,观察电动机的转速变化;(2)使用变频器调速方法,通过改变变频器的输出频率,观察电动机的转速变化;(3)记录不同电压或频率下电动机的转速,并绘制转速-电压(或频率)曲线。
五、实验讨论与分析:1.起动部分:根据实验结果,我们可以得到电动机的起动时间。
通过与电动机的技术手册对比,可以验证实验结果与理论值的一致性。
2.调速部分:通过对转速-电压(或频率)曲线的分析,我们可以发现电压或频率与电动机的转速之间存在一定的线性关系。
在电压调制调速方法中,电压越高,电动机的转速越大;在变频器调速方法中,频率越高,电动机的转速越大。
这与我们之前学到的电动机调速原理是一致的。
六、实验总结:通过本次实验,我们深入了解了三相异步电动机的起动方法和调速控制原理,并通过实验验证了电压调制调速与变频器调速的效果。
掌握了这些知识和技能,有助于我们在实际工程中更好地应用与操作三相异步电动机。
自主设计实验一三相异步电动机的正反转控制线路

自主实验一三相异步电动机的正反转控制线路
一、实验目的
1、通过对三相异步电动机正反转控制线路的接线,掌握由电路原理图接成实际操
作电路的方法。
2、掌握三相异步电动机正反转的原理和方法。
3、掌握手动控制正反转控制、接触器联锁正反转、按钮联锁正反转控制及按钮和
接触器双重联锁正反转控制线路的不同接法,并熟悉在操作过程中有哪些不同
之处。
二、选用组件
1、实验设备
2、屏上挂件排列顺序
D61、D62
三、实验要求
1、接触器联锁正反转控制线路设计与实验(线路一)
2、按钮联锁正反转控制线路设计与实验(线路二)
3、按钮和接触器双重联锁正反转控制线路设计与实验(线路三)
四、讨论题
1、试分析图线路一、线路二、线路三各有什么特点?
2、图线路一、线路二虽然也能实现电动机正反转直接控制,但容易产生什么故障,为什么?图线路三比图线路一、线路二有什么优点?
3、接触器和按钮的联锁触点在继电接触控制中起到什么作用?
五、实验组件实物图
1. D61
2. D62
3. 三相鼠笼异步电动机DJ16。
三相异步电动机实习报告
三相异步电动机实习报告在本次实习中,我主要负责了三相异步电动机的实验研究和数据分析。
三相异步电动机作为一种常见的电动机,广泛应用于工业生产中,具有运行可靠、维护方便、成本低廉等优点。
通过本次实习,我对三相异步电动机的结构、工作原理以及性能特点有了更深入的了解。
首先,我对三相异步电动机的结构进行了学习和实际操作。
三相异步电动机主要由定子和转子两部分组成,定子上绕有三组对称分布的绕组,而转子则是由导体材料制成的。
在实验中,我通过拆解和组装电动机的过程,深入了解了电动机内部各个部件的结构和功能,对电动机的工作原理有了更清晰的认识。
其次,我进行了三相异步电动机的性能测试和数据分析。
在实验室中,我通过连接电路、调节参数等操作,成功实现了对电动机的启动、调速、制动等控制。
通过测量电动机的转速、电流、功率因数等参数,并利用相关仪器进行数据记录和分析,我得出了电动机在不同工况下的性能曲线和特性参数。
这些数据为我进一步了解电动机的运行规律和性能特点提供了重要依据。
最后,我对实验结果进行了总结和分析。
通过对实验数据的分析,我发现电动机的效率随着负载的增加而逐渐降低,而功率因数则随着负载的增加而提高。
同时,我还发现在不同的工作条件下,电动机的运行状态和性能表现存在一定的差异。
这些结论对于进一步优化电动机的运行控制和提高其效率具有一定的指导意义。
通过本次实习,我不仅对三相异步电动机有了更深入的了解,同时也提高了自己的实际操作能力和数据分析能力。
在未来的工作中,我将继续努力,不断提升自己的专业技能,为电动机及其控制系统的研究和应用做出更大的贡献。
总之,本次实习使我受益匪浅,对三相异步电动机有了更深入的了解,也提高了自己的实践操作能力和数据分析能力。
希望在今后的学习和工作中能够继续努力,不断提升自己的专业能力,为电动机及其控制系统的研究和应用做出更大的贡献。
实验一三相异步电动机点动和自锁控制

实验一三相异步电动机点动和自锁控制实验一:三相异步电动机点动和自锁控制一、实验目的1.掌握三相异步电动机点动控制原理和实现方法。
2.掌握三相异步电动机自锁控制原理和实现方法。
3.理解点动与自锁控制在实际应用中的差异及其适用场合。
二、实验原理1.点动控制:通过手动开关或按钮控制电动机的启动和停止,适用于短时间、临时性的控制。
其特点是操作简单,但容易误操作,不安全。
2.自锁控制:利用接触器的辅助触点与启动按钮串联,实现电动机的连续运转。
当按下启动按钮时,接触器吸合,电动机开始运转;当松开启动按钮时,接触器仍然保持吸合状态,电动机继续运转。
自锁控制在长时间连续运转的场合应用广泛,具有安全可靠的特点。
三、实验步骤1.准备实验器材:三相异步电动机、交流接触器、热继电器、按钮开关、导线等。
2.搭建实验电路:根据点动和自锁控制的原理,设计并搭建实验电路。
电路应包括电源部分、控制部分和负载部分。
3.通电前检查:在通电前,检查电路连接是否正确,是否符合电气安全规范。
特别注意电源与负载的连接是否正确,以及导线是否接触良好。
4.点动控制实验:(1)按照电路图连接好电源、控制和负载部分。
(2)按下按钮开关,观察电动机是否启动。
(3)松开按钮开关,观察电动机是否停止。
5.自锁控制实验:(1)在点动控制电路的基础上,添加接触器的辅助触点与启动按钮串联。
(2)按照电路图连接好电源、控制和负载部分。
(3)按下按钮开关,观察电动机是否启动并持续运转。
(4)松开按钮开关,观察电动机是否继续运转。
6.观察与记录:在实验过程中,观察并记录各种操作下的电动机状态,以及接触器的吸合与释放情况。
7.整理实验数据:根据实验观察和记录的数据,分析点动控制和自锁控制在不同场合的适用性。
8.清理实验现场:在实验结束后,断开电源,拆除电路连接,并整理好实验器材。
四、实验结果与分析1.点动控制实验结果表明,当按下按钮时,电动机启动;松开按钮时,电动机停止。
三相异步电动机的正反转控制实验报告2页2页
三相异步电动机的正反转控制实验报告2页2页实验报告实验目的:了解三相异步电动机的正反转控制原理,掌握正反转控制电路的设计方法和程序控制方法。
实验器材:三相异步电动机、交流电源、直流电源、电容、功率电阻、三相电机接线板、万用表、逻辑电路板、光耦隔离器、继电器等。
实验原理:三相异步电动机的正反转控制原理是利用三相电机的相序控制实现正反转。
相序反转时电机的运转方向也会反转。
相序控制可以通过电容、功率电阻、交换相线和三相全波可控硅等方式实现。
实验内容和步骤:1. 实验设备连接。
将三相电机连接在三相电机接线板上,将功率电阻和电容连接在交流电源的输出端。
将逻辑电路板和光耦隔离器连接在直流电源上。
2. 正转控制电路设计。
将逻辑电路板和光耦隔离器连接在一起,按照电路图连接电源和继电器线圈。
连接光电耦合器输入端和逻辑电路输出端。
3. 反转控制电路设计。
将逻辑电路板和光耦隔离器连接在一起,按照电路图连接电源和继电器线圈。
连接光电耦合器输入端和逻辑电路输出端。
4. 程序控制电路设计。
使用逻辑电路板和光耦隔离器进行控制,将正转和反转控制电路分别连接在输出端口上。
使用开关控制正转和反转。
5. 实验操作和结果。
根据线路连接图进行电路连接,正确接线后,按下控制开关进行正、反转控制,电机能够正常启动和停止,并且能够正、反转。
实验结论:通过本次实验,我们了解了三相异步电机的正反转控制原理和方法,掌握了正反转控制电路的设计方法和程序控制方法。
我们成功地实现了三相异步电机的正反转操作,并且能够通过控制开关进行控制。
实验中还需注意安全问题,例如使用交流电源时,要注意接线的正确性和电路的绝缘性能,避免发生电击事故。
三相异步电动机正反转控制电路实习报告
三相异步电动机正反转控制电路实习报告下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!本店铺为大家提供各种类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you! In addition, this shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts, other materials and so on, want to know different data formats and writing methods, please pay attention!一、引言在现代工业生产中,电动机的正反转控制是一项非常重要的技术。
三相异步电动机实验报告
三相异步电动机实验报告实验目的:通过实验验证三相异步电动机的基本原理和运行特性。
实验仪器设备:1.三相异步电动机(带有小负载);2.电动机试验台;3.三相交流电源;4.测功机;5.电压表、电流表、功率表等。
实验原理:三相异步电动机是一种常见的工业电机,广泛应用于机械设备的驱动。
其工作原理是通过三相交流电源产生的旋转磁场与电动机中的定子磁场相互作用,使电动机产生旋转运动。
异步电动机根据转子结构和工作原理不同,可分为串励电动机、永磁同步电动机等。
实验步骤:1.将三相异步电动机安装在试验台上,并连接好电源线和电控线;2.打开电源开关,将试验台上的切换开关拨至试验状态;3.调节电源电压,使电动机运行在额定电压条件下;4.通过调节电源频率,改变电动机的转速;5.使用测功机测量电动机的输出功率,记录下电动机在不同转速下的功率值;6.使用电压表、电流表等仪器测量电动机的输入电压、电流等参数,并记录下来。
实验结果与分析:根据实验数据,我们可以绘制出电动机转速与输出功率、输入电流之间的曲线图。
从实验结果中可以看出,随着电动机转速的增加,输出功率逐渐增加,直至达到最大功率点,然后逐渐减小。
而输入电流也随着转速增加而逐渐增大,但增长速度较输出功率缓慢。
实验结论:1.三相异步电动机的转速与输出功率呈正相关关系,随着转速的增加,输出功率逐渐增大;2.输入电流与转速呈正相关关系,转速越高,输入电流越大;3.三相异步电动机在达到最大功率点时输出功率最大。
实验注意事项:1.在实验前应仔细检查电路连接是否正确,确保安全;2.调节电源电压时,应逐渐增加,避免电动机受到过大的冲击;3.实验过程中,应定期检查电动机的运行状态和试验台的稳定性;4.实验结束后,应及时关闭电源开关。
总结:通过本次实验,我们对三相异步电动机的基本原理和运行特性有了更深入的了解。
实验结果验证了转速与输出功率、输入电流之间的关系,为电动机的应用和设计提供了一定的参考依据。
三相异步电动机的工作特性和参数测定
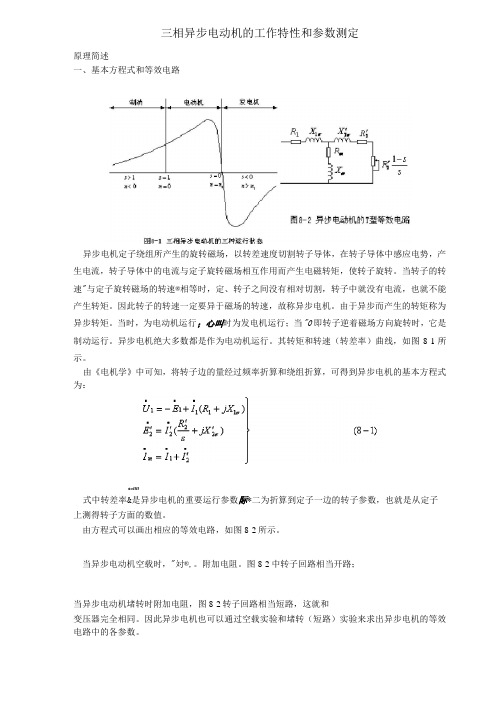
三相异步电动机的工作特性和参数测定原理简述一、基本方程式和等效电路异步电机定子绕组所产生的旋转磁场,以转差速度切割转子导体,在转子导体中感应电势,产生电流,转子导体中的电流与定子旋转磁场相互作用而产生电磁转矩,使转子旋转。
当转子的转速"与定子旋转磁场的转速®相等时,定、转子之间没有相对切割,转子中就没有电流,也就不能产生转矩。
因此转子的转速一定要异于磁场的转速,故称异步电机。
由于异步而产生的转矩称为异步转矩。
当时,为电动机运行;心叫时为发电机运行;当"0即转子逆着磁场方向旋转时,它是制动运行。
异步电机绝大多数都是作为电动机运行。
其转矩和转速(转差率)曲线,如图8-1所示。
由《电机学》中可知,将转子边的量经过频率折算和绕组折算,可得到异步电机的基本方程式为:s=tttt式中转差率&是异步电机的重要运行参数际*二为折算到定子一边的转子参数,也就是从定子上测得转子方面的数值。
由方程式可以画出相应的等效电路,如图8-2所示。
当异步电动机空载时,"対®,。
附加电阻。
图8-2中转子回路相当开路;当异步电动机堵转时附加电阻,图8-2转子回路相当短路,这就和变压器完全相同。
因此异步电机也可以通过空载实验和堵转(短路)实验来求出异步电机的等效电路中的各参数。
X —*(S-4)、空载实验由空载实验可以求得励磁参数丘护汎以及铁耗0珂和机械损耗戸门。
实验是 在转子轴上不带任何机械负载,转速,电源频率V"的情况下进行的。
用调压器改变试验电压大小,使定子端电压从(U3)S 逐步下降到°'3^左右,每次记录电动机的端电压久、空载电流珀和空载功率喘,即可得到异步电动机的空载特性珀'%=讯如所示。
图8-3空载特性图8-4铁耗和机械耗分离空载时,电动机的输入功率全部消耗在定子铜耗、铁耗和转子的机械损耗上。
所以从空载功率中减去定子铜耗,即得铁耗和机械耗之和用,即式中尽为定子绕组每相电阻值,可直接用双臂电桥测得。
三相异步电动机实验报告

(5)若堵转试验时最大电压在~倍额定电压范围内,应根据试验数据绘制堵转特性曲线 , ,额定电压的堵转电流 ,堵转转矩 ,由特性曲线上查取。
(6)若堵转试验时限于设备,最大电压低于 ,应作 曲线,并延长在该曲线上查取 时的堵转电流 ,此时的堵转转矩按下式求取:
, ——试验中测取的最大电流及该点转矩
(五)电机型式试验记录及计算
10.启动过程中最小转矩的测定(仅对笼形电机)。
11.超速试验(对笼形转子电动机,仅在型式试验时进行)。*
12.振动的测定。*
13.噪声的测定。
14.转动惯量的测定。
15.短时升高电压试验。*
16.耐电压试验。*
其中后面标有*的为检查试验项目。第12项也可根据需要仅列为型式试验项目。
二、试验内容及方法
=毫米
(8)作工作圆
连接O和D点,作OD线的垂直平分线,交OE于C点,C点即为工作圆的圆心。作工作圆的半圆ODE。量工作圆直径
=毫米
=安
(9)起动圆短路点
根据短路试验数据:取试验线电流接近(~) 点的 、 、 ,按 计算
按 计算 ,按 和 确定起动圆短路点D1(方法同工作圆)。
安
=伏
=瓦
安
=毫米
瓦
=毫米
(3)效率的间接测定法
效率的测量有间接法和直接法,采用间接法各部分损耗按下面方法计算:
三相异步电动机启停控制实验.doc

第八节铣床自动控制程序铣床的种类很多,有立铣、卧铣、龙门铣和仿形铣等,它们的加工性能及使用范围各不相同,但梯形图程序的设计方法基本一致。
一、控制要求X62W万能升降台铣床采用三相笼形异步电动机拖动,并且主轴的主运动和工作台的进给运动分别由单独的电动机拖动。
铣床主轴的主运动为刀具的切削运动,有顺铣和逆铣两种加工方式。
工作台的进给运动有水平工作台前、后、左、右、上、下六个方向的进给运动,以及圆工作台的回转运动。
其控制要求如下:1、主轴电动机M1(7.5kW、1450r/min)空载时直接起动,为实现顺铣和逆铣两种加工方式,要求能够正反转,为提高生产率,要求采用电磁制动器YB进行停车制动,同时从安全和操作方便的角度考虑,换刀时主轴应处于制动状态,且主轴电动机M1可在两处实行起停等控制操作。
2、工作台进给电动机M2直接起动,而且要求能够正反转。
为提高生产率,要求空行程时可快速移动。
工作台的各进给运动之间必须联锁,并由手柄操作机械离合器选择进给运动的方向。
3、电动机M3拖动冷却泵,在铣削加工时提供切削液。
4、主轴运动和进给运动采用变速孔盘来进行速度选择。
为保证变速齿轮进入良好的啮合状态,要求电动机在变速后能够瞬时点动。
5、加工工件时,为保证设备安全,要求主轴电动机M1起动后,工作台进给电动机M2才能起动。
二、动作分析及I/O点分配1、主轴电动机M1的起动主轴换向开关选定电动机的转向后,闭合主轴上刀制动开关SA2-1,然后按下起动按钮SB3或SB4,主交流接触器KM1的线圈得电,其主触点闭合,主轴电动机M1按给定方向起动运转。
2、主轴电动机M1的制动按下停止按钮SB1或SB2,其常闭触点使主交流接触器KM1的线圈失电,主轴电动机M1脱离电源,同时其常开触点闭合,使电磁制动器YB的线圈得电,对M1进行制动停车。
当进行换刀和上刀操作时,闭合主轴上刀制动开关SA2-2,KM1线圈失电的同时YB线圈得电,使M1处于制动状态不能转动,保证了换刀和上刀操作的顺利进行。
三相异步电动机长动控制实验
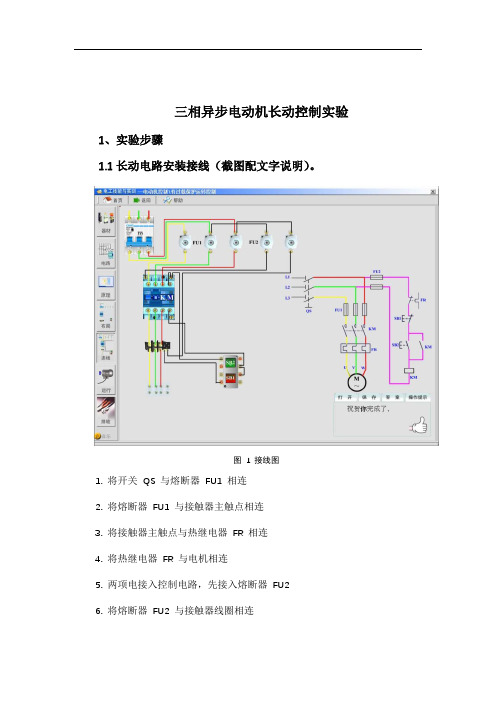
三相异步电动机长动控制实验1、实验步骤1.1长动电路安装接线(截图配文字说明)。
图 1 接线图1. 将开关QS 与熔断器FU1 相连2. 将熔断器FU1 与接触器主触点相连3. 将接触器主触点与热继电器FR 相连4. 将热继电器FR 与电机相连5. 两项电接入控制电路,先接入熔断器FU26. 将熔断器FU2 与接触器线圈相连7. 将接触器线圈与接触器辅助触点、SB2 相连(助触点与SB2 并联)8. 将SB2 与SB1 串联9. 将SB1 与热继电器FR 串联10.将热继电器FR 与熔断器FU2 串联完成接线1.2 长动控制PLC程序及仿真结果(截图配文字说明)。
图 2 PLC程序图I0.0-SB2 起动按钮I0.1-SB1 停止按钮I0.2-FR 熔断器Q0.0-M 电动机;将上述程序导出,并进行以下仿真。
可直观看到,在按下I0.0时,电动机长动,当断开I0.1时,电动机停转,符合设计要求。
图 3 PLC仿真结果1图 4 PLC仿真结果22、实验讨论题作答实验题号1、画点动、长动、即可点动又可长动电路图,比较其结构和功能上有何区别?点动控制时,按下SB1,KM1闭合,电机启动;松开SB1时,KM1断开,电机停止。
长动控制时,按下SB2,KM1闭合,电动机长动;按下SB1时,KM1断开,电机停止。
长动+点动控制时,按下SB2电机点动;旋动SA,并按下SB2时,电机长动。
二者均是断开SB1,即KM1断电,电机停转。
2、长动控制电路中各电器Q1、FU1、FU2、FU3、FU4、KM1、FR、SB1、SB2、SB3各起什么作用?已经使用了熔断器为何还要使用热继电器?已经有了开关Q1为何还要使用接触器KM1?Q1是用于手动控制电源通断,不能直接给电动机M供电,只是起到了电源通入的作用;FU123是主回路熔断器,起短路保护作用,若发生三相电任意两项短路、或者任意相电路发生对地短路,短路电流将使熔断器迅速熔断,从而切断主电路电源,实现对电动机的保护;FR用于过载保护,当出现过载时,FR辅助触点断开,切断控制电路,接触器KM1断电,主触点和辅助触点断开,电动机停机;KM1起到控制主电路通断作用,实现控制功能;SB1为断电按钮,按下后即断开电源,使得KM1失电,电机停转;SB2按下后,使得KM1得电,电机启动。
三相异步电动机的Y—△启动控制实验报告DOC
可编程控制器课程设计报告书三相异步电动机的Y—△启动控制学院名称:自动化学院学生:专业名称:班级:时间:2021年5月20日至5月31日一、设计目的:1.了解交流继电器、热继电器在电器控制系统中应用。
2.了解对自锁、互锁功能。
3.了解异步电动机Y—△降压启动控制的原理、运行情况及操作方法。
二、设计要求:1、设计电动机Y—△的启动控制系统电路;2、装配电动机Y—△启动控制系统;3、编写s7_300的控制程序;4、软、硬件进展仿真,得出结果。
三、设计设备:1.三相交流电源〔输出电压线〕;2.继电接触控制、交流接触器、按钮、热继电器、熔断器、PLCS300;3.三相鼠笼式电动机。
四、设计原理:对于正常运行的定子绕组为三角形接法的鼠笼式异步电动机来说,如果在启动时将定子绕组接成星形,待起动完毕后再接成三角形,就可以降低启动电流,减轻它对电网的冲击,这样的起动方式称为星三角减压启动,或简称为星三角启动〔Y-Δ启动〕。
星三角起动法适用于正常运行时绕组为三角形联接的的电动机,电动机的三相绕组的六个出线端都要引出,并接到转换开关上。
起动时,将正常运行时三角形接法的定子绕组改接为星形联接,起动完毕后再换为三角形连接。
这种方法只适用于中小型鼠笼式异步电动机.定子绕组星形连接时,定子电压降为三角形连接的1/√3,由电源提供的起动电流仅为定子绕组三角形连接时的1/3。
就是可以较大的降低启动电流,这是它的优点.但是,由于起动转矩与每相绕组电压的平方成正比,星形接法时的绕组电压降低了1/ √3倍,所以起动转矩将降到三角形接法的1/3,这是其缺点。
Y-△降压启动器仅适用于△运行380V的三相鼠笼式电动机作空载或轻载启动。
三相鼠笼式异步电动机Y—△降压启动控制线路图,如图1所示。
图1原理图的分析:按下空开后,按下SB1按钮,KM,KMY线圈得点,同时计时器也开场计时,KM得点,SB1按钮断开,KM触点闭合实现自锁,此时KM、KMY 触点闭合,电动机以Y型启动;当计时器计时时间到,如上电路图KMΔ线圈得到,KMΔ常闭触点断开KMY线圈失电,KMY触点断开,KMΔ触点闭合进展工作,同时KMΔ动合触点闭合实现了互锁电路,此时电动机以Δ型运行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第33卷 第2期2011年4月电气电子教学学报JO U RN A L O F EEEVol.33 No.2Apr.2011三相异步电动机的实验设计牟宪民,刘凤春,李冠林,陈希有(大连理工大学电气工程学院,辽宁大连116023)收稿日期:2010 05 28;修回日期:2010 09 20作者简介:牟宪民(1973 ),男,博士,讲师,主要从事电工学教学和电力电子变换科学研究,E mail:mu xm@刘凤春(1962 ),女,硕士,副教授,主要从事电机与拖动教学与科研工作,E m ail:lfc5e001@ 李冠林(1979 ),女,博士,讲师,主要从事电路教学和混沌电路科学研究,E m ail:lglhit@ 陈希有(1962 ),男,博士,教授,主要从事电路教学和电力电子变换科学研究,E mail:chen xy@摘 要:本文提出了包括实验、仿真和再实验的三步实验课授课方法。
通过首次实验获取三相异步电动机模型的参数,随后利用获取的参数建立仿真模型并进行仿真,这样,在最后阶段的实验中,可以获得更准确更丰富的实验结果。
实践表明,三步实验授课方法收到了显著的实验效果,并可推广应用于相关电气类课程实验。
关键词:异步电动机;实验设计;仿真实验中图分类号:G424.31;TM 343+.2文献标识码:B 文章编号:1008 0686(2011)02 0052 03Design of Three Phase Asynchronous Motor ExperimentMU Xian min,LIU Feng chun,LI Guan lin,CHEN Xi you(Sc hool of Electrical E ngineer ing ,Dalian Univ ersity of T ech nology ,Dalian 116023,China)Abstract:A thr ee step m ethod including ex periment,simulatio n and re ex periment is proposed in this paper.In fir st ex periment stage,the parameter s of three phase asy nchr onous motor are obtained.T hen,the simulation model is built using the parameters obtained above.In final ex periment stage,the m ore ex act and abundant results w ill be obtained.It has been show n that this three step ex periment method can impr ove the asynchro nous mo to r ex periment effects g reatly and can be spreaded to other electrical cour se ex periments.Keywords:asy nchronous m otor;exper im ent design;simulation 现在,越来越多的实验课都采用将计算机仿真和实际实验相结合的方式[1]。
为了使仿真结果更接近实验结果,仿真电路中的模块参数必须尽量和实际实验的设备参数一致。
一般情况下,实验室的实验对象(三相异步电动机)功率较小,参数的误差对仿真的结果影响较大[2]。
同时实验室的实验对象一般没有给出详细的参数,不能直接获得实验对象的仿真模型参数。
我校的 电机与拖动 实验课程中引入了M atlab 仿真工具,借助于实验室开放的有利条件,采用本文提出的三步实验方法,收到了显著的实验效果。
1 电机与拖动实验改革的思路电机与拖动 课程理实验线路复杂,实验所用的仪表较多,实验时接线占用时间较长,对所测数据是否正确亦难以判断。
采用M atlab 仿真工具进行预习实验,可以不受场地与设备的限制。
通过在仿真环境中连接实验线路的操作过程的练习,再回到真实的实验环境,学生操作技能可明显提高。
更重要的是,仿真的结果是否正确,可以从容分析比较。
并以此为基础,学生就可在真实实验过程中判断所测取得数据是否正确有效。
传统的专业课程实验室一般是不开放的,由于设备的限制,实验内容亦不能开放。
通过校级教学改革项目 电机与拖动课程综合改革的研究与实践 ,我们在实验课程中实施了重要改革措施:开放实验室和开放实验内容,并使用Matlab 仿真工具进行实验项目的仿真研究。
具体做法是: 通过初次实验获取研究对象的参数,学生可自行安排时间去开放的实验室完成此步骤; 将实测参数用于仿真实验,建立与实验内容相同的仿真模型进行仿真研究和分析; 搭建实验电路再次进行实验,获得实验结果。
2 三相异步电动机实验设计2.1 模型参数识别实验实验目的是测试和推算三相异步电动机仿真模型所需要提供的仿真模型参数:定子电阻和漏电抗、转子电阻和漏电抗以及励磁电阻和电抗。
这些参数都反映在如图1所示的异步电动机的T 型等效电路中。
图中,s 为转差率,转子电路参数为折算值。
通过空载实验(开路实验)和堵转实验(短路实验)就可以确定这些参数[3,4]。
图1 异步电动机T 型等效电路实验所采用的异步电机参数为:额定功率P N =100W,额定电压U N =220V,额定电流I N =0.48A,额定转速n N =1420r/min,三角型接法,E 级绝缘。
(1)空载实验按照空载实验的条件设计空载实验线路和方法,测取多组输入电压U 10、空载电流I 10、空载输入功率P 10和转速n 。
由此可以计算出励磁阻抗的数值R m 和X m 。
(2)堵转实验按照短路实验的条件设计堵转实验线路和方法,测取多组输入电压U 1s 、堵转电流I 1s 和堵转输入功率P 1s 。
由此可以计算出漏阻抗的数值X 1 、R 2和X 2 。
经过计算,得到三相异步电动机的参数为R m =15 ,X m =327.2597 ,X 1 =47.0925 、R 2=16.2036 ,X 2 =20.2004 。
实测R 1=15 。
2.2 仿真实验我们介绍的三相笼型异步电动机直接起动的仿真实验模型的建立方法,可用于其它实验。
使用M atlab 中的Simulink,按照实验电路建立仿真模型电路如图2所示。
图2 三相笼型异步电动机直接起动的仿真模型仿真模型中包括主电路模块(交流电压源,异步电动机和三相断路器)、测量显示模块(电流测量、电压测量、有效值计算、电动机测量、数值显示和常量模块)和电力仿真图形接口模块。
我们可按照实验要求和上一节中获得的三相异步电动机参数的计算结果,设定仿真模型参数。
仿真电路模型中,三相异步电动机的输入转矩为0,表示三相异步电动机为空载直接启动。
建立仿真模型后便可进行仿真。
通过仿真模型中的显示模块可直接观察到直接起动电流、直接起动转矩以及直接起动转速随时间的变化等数值。
动态过程可以通过示波器(Scope)模块进行观察随时间变化的过程,图4给出了三相异步电动机的起动电流波形。
由图可知,起动电流Ist =2A 。
进入稳态后,相当于电动机空载运行,可通过数值显示(Display)模块进行观察。
此时转速为空载转速n =1494转/分,线电流为空载电流I10=0.3403A 。
这些数据与空载实验实测获得的数据十分符合。
图4 三相异步电动机起动电流波形通过仿真实验,学生不仅进行了虚拟接线练习,测量了实验数据,还了解到了电机稳态分析所没有涉53第2期牟宪民,刘凤春等:三相异步电动机的实验设计及到的问题,即暂态过程中各物理量的变化规律。
由此可引导学有余力的学生进一步深入思考相关问题。
2.3 实验验证在仿真实验的基础上,学生可预约实验时间进入实验室进行真实的实验。
一般通过仿真实验后再实施真实实验的项目,绝大多数学生的接线能力与实验数据的准确性都有很大的提高。
我们应当提醒学生,真实实验中所采用的测试仪表与仿真实验所使用的测试模块不同,测试项目也不尽相同。
对于电机实验,真实实验首先要使用兆欧表测量电机的绝缘电阻,在进行绕组判断后才能接线,对于大的起动电流需要使用钳型电流表测试等。
3 结语我们借助于实验室开放的有利条件,合理设计实验过程,将部分实验学时用于仿真实验,收到了事半功倍的实验效果。
本文以三相异步电动机的实验为例,采用了实验、仿真和再实验的三步法获得实验结果。
该方法也可以应用到其它的验证性实验中。
本文的三相异步电动机模型参数中的转动惯量和摩擦系数两个参数,不能通过空载实验和堵转实验进行辨识,有待今后设计合适的实验进行模型参数识别。
参考文献:[1] 孙静,周元钧,张磊.基于M atlab的电力系统仿真平台[J].南京:电气电子教学学报,2009,31(4):57 59[2] 杨霞.三相异步电动机实验的改进[J].唐山:唐山师范学院学报,2002,24(2):52 53[3] 郑建勇.单相异步电机在线堵转性能测量方法研究[J].上海:中小型电机,2003,30(1):71 74[4] 孙建忠.刘凤春.电机与拖动[M].北京:机械工业出版社,2007(上接第51页丘东元等文)我们通过仿真,可以看到电源内部的温度场分布,并可以根据需要显示某检测点的温度进而看到装置的热分布所存在的问题。
在所例举的开关电源中发现两个散热片上的温度存在较大差别,二极管区域的散热片2温度明显高于散热片1。
进而我们可以通过改变散热片2的尺寸或散热材料来改善这一问题。
3)应用CFD软件辅助优化利用Flother m软件可以快捷地实现优化,在Co mmand Center中,修改一个或同时修改多个参数(包括材料,尺寸等),每个参数可以分几步修改。
通过软件仿真就可以看到在每步参数修改下,测试点的温度或者如散热器质量和系统风量等参数的差异。
反映出来的是优化效果与成本的关系,从而可以从直观对比中选择合适的优化方案。
3 结语通过应用Flotherm软件对装置进行热分析,我们可以掌握装置内部的温度分布。
根据分析,我们可以作出相应的改善方案来提高装置工作的可靠性,对今后的电源结构小型化及其散热器的选择具有一定的指导作用。
可见在电力电子装置的设计过程中利用热分析,可以使得装置工作更加稳定可靠,延长设备使用寿命。
我们把热分析融入电力电子教学中,通过搭建简易电路,分析其中各功率器件的损耗,进而用CFD软件建立模型分析,直观地认识装置的热场分布甚至某功率器件的温度情况,可以加深学生对电力电子装置的工作可靠性认识。