具有超稳定结构的鲁棒自适应控制器
控制系统中的鲁棒控制与自适应控制

控制系统中的鲁棒控制与自适应控制鲁棒控制与自适应控制是控制系统中两种重要的控制策略。
本文将对这两种控制方法进行详细介绍,并探讨它们在控制系统中的应用。
一、鲁棒控制鲁棒控制是一种控制方法,旨在使系统对于参数变化、外部干扰和建模误差具有较好的鲁棒性。
它通过设计控制器,使得系统能够在不确定性条件下保持稳定性和性能。
鲁棒控制通常用于应对实际系统中存在的模型不准确、参数变化和干扰等不确定因素。
鲁棒控制的一个重要工具是H∞控制理论。
H∞控制通过优化系统的H∞范数,将鲁棒性能与控制性能相结合。
它可以通过鲁棒性设计方法来有效地解决不确定性和干扰问题,提高系统的稳定性和鲁棒性。
鲁棒控制广泛应用于工业控制、飞行器控制和机器人控制等领域。
例如,在工业控制中,鲁棒控制可以帮助系统应对参数变化、负载扰动和模型不确定性。
在飞行器控制中,鲁棒控制可以提高系统对于风速变化和姿态扰动的鲁棒性。
在机器人控制中,鲁棒控制可以应对不确定的环境和任务需求变化。
二、自适应控制自适应控制是一种控制方法,通过实时地调整控制算法和参数来适应系统的变化。
自适应控制具有较强的适应性和鲁棒性,在面对系统参数变化和模型不准确时表现出良好的控制性能。
自适应控制基于模型参考自适应原理,通过参考模型来实现期望输出与实际输出的一致性。
它根据误差和系统状态,自适应地调整控制器参数,以达到期望的控制效果。
同时,自适应控制器还可以实时地对系统参数进行估计和补偿,提高系统的鲁棒性和性能。
自适应控制在很多领域都有广泛的应用。
例如,在机电系统中,自适应控制可用于解决系统刚性和非线性问题。
在信号处理中,自适应滤波器可用于实时地调整滤波器参数,提高滤波性能。
在网络控制系统中,自适应控制可用于应对网络延迟和通信丢包等问题。
三、鲁棒控制与自适应控制的比较与应用鲁棒控制与自适应控制是两种不同的控制方法,各自具有不同的优势和适用范围。
鲁棒控制适用于系统模型不准确、参数变化和干扰等不确定性较大的情况。
控制理论中的最优控制与鲁棒控制

控制理论中的最优控制与鲁棒控制控制理论是研究如何设计系统,使其行为符合确定性或随机性要求的一门学科。
在控制理论中,最优控制和鲁棒控制是两个重要的概念。
它们分别代表着在不同情况下如何有效地控制系统,保证系统稳定性和性能。
最优控制是指在给定约束条件下,通过调节控制器的参数,使系统的性能达到最优。
最优控制问题可以用数学工具和优化方法来解决,通常包括确定最优控制器的结构和参数,以实现系统的最佳性能。
最优控制理论在航空航天、自动驾驶、机器人等领域有着广泛的应用,能够有效提高系统的鲁棒性和性能。
鲁棒控制则是指在系统存在各种不确定性和干扰时,仍能保持系统的稳定性和性能。
鲁棒控制的设计考虑系统不确定性的影响,能够有效应对各种外部扰动和环境变化,保证系统在不确定性条件下的稳定性和鲁棒性。
鲁棒控制理论在工业控制、气候控制、金融领域等有着广泛的应用,能够有效应对系统面临的各种挑战和风险。
在实际工程中,最优控制和鲁棒控制通常结合起来,以实现系统的高性能和可靠性。
最优控制能够提高系统的性能和效率,而鲁棒控制则能够保证系统在面对各种不确定性和干扰时仍能正常运行。
通过最优控制和鲁棒控制的结合,可以有效提高系统的鲁棒性和性能,实现系统在各种复杂环境中的稳定运行。
综上所述,控制理论中的最优控制与鲁棒控制是两个互补的概念,分别强调系统在确定性条件和不确定性条件下的优化控制。
它们在实际工程中有着重要的应用,能够有效提高系统的鲁棒性和性能,保证系统稳定运行。
通过不断研究和应用最优控制和鲁棒控制理论,可以为各种自动控制系统的设计和优化提供重要的理论支持和指导。
提高控制系统的鲁棒性与适应性
提高控制系统的鲁棒性与适应性1、含义鲁棒性:控制器参数变化而保持控制性能的性质。
适应性:控制器能适应不同控制对象的性质。
控制系统在其特性或参数发生摄动时仍可使品质指标保持不变的性能。
鲁棒性是英文robustness一词的音译,也可意译为稳健性。
鲁棒性原是统计学中的一个专门术语,70年代初开始在控制理论的研究中流行起来,用以表征控制系统对特性或参数摄动的不敏感性。
在实际问题中,系统特性或参数的摄动常常是不可避免的。
产生摄动的原因主要有两个方面,一个是由于量测的不精确使特性或参数的实际值会偏离它的设计值(标称值),另一个是系统运行过程中受环境因素的影响而引起特性或参数的缓慢漂移。
因此,鲁棒性已成为控制理论中的一个重要的研究课题,也是一切类型的控制系统的设计中所必需考虑的一个基本问题。
对鲁棒性的研究主要限于线性定常控制系统,所涉及的领域包括稳定性、无静差性、适应控制等。
鲁棒性问题与控制系统的相对稳定性和不变性原理有着密切的联系,内模原理的建立则对鲁棒性问题的研究起了重要的推动作用。
2、控制系统设计要求(指标)(1)、结构渐近稳定性以渐近稳定为性能指标的一类鲁棒性。
如果控制系统在其特性或参数的标称值处是渐近稳定的,并且对标称值的一个邻域内的每一种情况它也是渐近稳定的,则称此系统是结构渐近稳定的。
结构渐近稳定的控制系统除了要满足一般控制系统设计的要求外,还必须满足另外一些附加的条件。
这些条件称为结构渐近稳定性条件,可用代数的或几何的语言来表述,但都具有比较复杂的形式。
结构渐近稳定性的一个常用的度量是稳定裕量,包括增益裕量和相角裕量,它们分别代表控制系统为渐近稳定的前提下其频率响应在增益和相角上所留有的储备。
一个控制系统的稳定裕量越大,其特性或参数的允许摄动范围一般也越大,因此它的鲁棒性也越好。
(2)、结构无静差性以准确地跟踪外部参考输入信号和完全消除扰动的影响为稳态性能指标的一类鲁棒性。
如果控制系统在其特性或参数的标称值处是渐近稳定的且可实现无静差控制(又称输出调节,即系统输出对参考输入的稳态跟踪误差等于零),并且对标称值的一个邻域内的每一种情况它也是渐近稳定和可实现无静差控制的,那么称此控制系统是结构无静差的。
对鲁棒控制的认识
对鲁棒控制的认识 赵呈涛专业:学号: 092030071姓名:鲁棒控制( RobustControl )方面的研究始于 20 世纪 50 年代。
在过去的 20 年中,鲁棒控制一直是国际自控界的研究热点。
所谓“鲁棒性”,是指控制系统 在一定(结构、大小)的参数摄动下,维持某些性能的特性。
根据对性能的不同 定义,可分为稳定鲁棒性和性能鲁棒性。
如果所关心的是系统的稳定性,那么就称 该系统具有鲁棒稳定性;如果所关心的是用干扰抑制性能或用其他性能准则来描述的 品质,那么就称该系统具有鲁棒性能。
以闭环系统的鲁棒性作为目标设计得到的固定控制器称为鲁棒控制器。
定性,具有代表性的是 Zames 提出的微分灵敏度分析。
然而,实际工业过程中故障导致系统中参数的变化,这种变化是有界摄动而不是无穷小摄动,因此产生了以讨论参数在有界摄动下系统性能保持和控制为内容的现代鲁棒控制。
控制是一个着重控制算法可靠性研究的控制器设计方法, 际环境中为保证安全要求控制系统最小必须满足的要求。
一旦设计好这个控制 器,它的参数不能改变而且控制性能能够保证。
鲁棒控制方法,是对时间域或频率域来说,一般要假设过程动态特性的信息 和它的变化范围 , 一些算法不需要精确的过程模型,但需要一些离线辨识。
鲁棒 控制理论是分析和处理具有不确定性系统的控制理论,包括两大类问题:鲁棒性分析 及鲁棒性综合问题。
鲁棒性分析是根据给定的标称系统和不确定性集合,找出保证系 统鲁棒性所需的条件;而鲁棒性综合(鲁棒控制器设计问题)就是根据给定的标称模 型和不确定性集合,基于鲁棒性分析得到的结果来设计一个控制器,使得闭环系统满 足期望的性能要求。
主要的鲁棒控制理论有:1) Kharitonov 区间理论;2) H 控制理论;3)结构奇异值理论 理论。
面就这三种理论做简单的介绍。
1 Kharitonov 区间理论 1.1 参数不确定性系统的研究概况对参数不确定性系统的研究源于20世纪20年代。
一种区间系统的强稳定鲁棒H∞控制器设计

收稿日期$2016-11 -29 基 金 项 目 :黑 龙 江 省 自 然 科 学 基 金 (F201307# 作 者 简 介 :闫 哲 (1962— ),男 ,博 士 ,教 授 ,研 究 方 向 为 控 制 理 论 及 其 应 用 ;
贾 明 昊 (1992— # ,男 ,硕 士 ,研 究 方 向 为 控 制 理 论 及 其 应 用 ; 高 俊 山 (1962— ) ,男 ,博 士 ,教 授 ,研 究 方 向 为 直 线 电 机 及 其 控 制 、电 机 优 化 设 计 。 通 信 作 者 :闫 哲
第8期
闫 哲 等 $—种区间系统的强稳定鲁棒H" 控制器设计
107
> 引言
应用经典控制理论对控制系统进行分析和设计 时 ,系统参数一般是按精确值设计,而实际系统参数 在运行过程中由于自身变化或者外界环境影响导致 精 确 模 型 本 身 就 存 在 误 差 ,而 传 统 控 制 方 法 很 难 消 除这种误差由此转变为对参数在一定范围内变化的 区间系统进行分析。K haritonov提出基于区间分母 多项式的稳定性检验定理后[1],相关学者由此提出 了 一 些 适 用 于 区 间 系 统 的 控 制 方 法 ,但 Kharitonov 稳定性检验计算繁琐且得到的控制器往往都是高阶 控制器限制了实际应用[!F=]。在此之后国外学者相 继提出一些区间系统降阶的方法,如 提 出 应 用 + -5 型劳斯表[4_5]、利 用 P . e 近似化[D]等 方 法 降 阶 ,但 都没有对控制器设计方法的强稳定控制器数值设计实
例并仿真。结 果 表 明 系 统 在 一 定 参 数 摄 动 和 负 载 2 5 % 波 动 下 达 到 强 稳 定 ,3 s 内超调量控制在
2 0 % 以下。
鲁棒控制理论
鲁棒控制理论鲁棒控制理论是一种被广泛运用的控制工程理论,它可以在不可预知的环境中,运行控制系统的高效协调和准确的效果。
这种理论可以为自动控制系统提供一种通用的解决方案,以达到更好的控制效果。
鲁棒控制理论是一种动态系统控制理论,它存在于复杂系统中,可以有效地应对环境变化和外部干扰,以实现系统目标。
与普通控制理论不同,鲁棒控制理论重视系统的可靠性,可以适应实际环境的变化,从而实现较高的控制效果。
作为一种新兴控制理论,鲁棒控制理论有着广泛的应用,它可以应用于机器人、自动化仪表、航空航天控制系统以及其他复杂的自动控制系统中。
鲁棒控制理论的主要特点是:可靠性、稳健性、健壮性、可拓展性和可调节性。
首先,鲁棒控制理论具有可靠性。
鲁棒控制的可靠性是由于它的结构特点所决定的,它可以有效地抵抗外部环境的变化,从而实现控制系统的准确性和稳定性。
其次,鲁棒控制理论具有稳健性、健壮性和可拓展性。
稳健性是指控制系统在面对不可预料的外部干扰时仍能达到较高的控制效果;健壮性是指控制系统在不确定的环境状态下仍能保持高效;可拓展性是指当外部环境发生变化时,控制系统也可以快速地适应这些变化,从而实现更好的控制效果。
最后,鲁棒控制理论具有可调节性。
可调节性是指控制系统可以自行调节其输入参数,以改善系统的性能。
因此,当外部环境发生变化时,控制系统也可以自行调节以适应这些变化,从而实现更好的控制效果。
鲁棒控制理论是当今自动控制系统开发的一种有效途径,它具有可靠性、稳健性、健壮性、可拓展性和可调节性等特点。
鲁棒控制理论的出现,使自动化控制的可靠性、可维护性和可拓展性大大提高,在自动控制系统的开发过程中也发挥了重要作用。
综上所述,鲁棒控制理论在自动控制系统开发中有着重要的作用,它具备可靠性、稳健性、健壮性、可拓展性和可调节性等特点,使得自动化控制能够在复杂环境中达到更好的控制效果。
因此,鲁棒控制理论值得被广泛运用,以实现更好的自动化控制效果。
基于QFT的高超声速飞行器鲁棒控制器设计的开题报告

基于QFT的高超声速飞行器鲁棒控制器设计的开题报告一、研究背景与意义高超声速飞行器是近年来国际上热门的研究课题之一。
其能够达到极高的飞行速度,具有快速响应、高灵敏度等特点,被视为航空航天领域的一项重要技术。
高超声速飞行器的控制是确保其稳定、安全飞行和完成各种任务的重要保障。
但高超声速飞行器的非线性、不稳定特性、发动机涡轮机与反推等多失效控制方式的限制,使得传统控制方法难以满足高超声速飞行器的控制需求,因此需要开发鲁棒控制器。
量子场论(QFT)为解决非线性、鲁棒控制问题提供了可行性。
其方法为量化系统不确定性,将其改为标准化的数学模型,从而得到鲁棒控制器设计方案。
在高超声速飞行器控制领域中,QFT方法的应用也越来越广泛。
因此,本研究旨在针对高超声速飞行器控制问题,基于QFT设计一种鲁棒控制器,以提高其控制效率和稳定性,为高超声速飞行器的研制和应用提供支持。
二、研究内容与方法1、研究内容(1)高超声速飞行器的控制特点和控制要求(2)QFT理论及其在控制中的应用(3)针对高超声速飞行器设计QFT鲁棒控制器的方案(4)鲁棒控制器的仿真验证和性能分析2、研究方法(1)文献调研:了解高超声速飞行器控制的相关知识和鲁棒控制技术的研究现状。
(2)理论分析:对高超声速飞行器的控制特点和控制要求进行分析,并学习QFT理论,确定鲁棒控制器设计方案。
(3)仿真验证:利用Matlab对所设计的鲁棒控制器进行仿真,验证其控制效果和稳定性。
(4)性能分析:通过仿真结果进行控制性能分析,对鲁棒控制器进行评估,提高其设计精度和性能。
三、论文结构安排第一章绪论1.1 研究背景与意义1.2 研究现状1.3 研究内容与方法1.4 论文结构安排第二章高超声速飞行器控制特点与控制要求2.1 高超声速飞行器的发展历程2.2 高超声速飞行器的控制特点2.3 高超声速飞行器的控制要求第三章 QFT理论及其在控制中的应用3.1 QFT理论的基本概念和原理3.2 QFT在控制中的应用3.3 QFT方法的优点与不足第四章基于QFT的高超声速飞行器鲁棒控制器设计4.1 鲁棒控制器基本结构4.2 鲁棒控制器设计过程4.3 鲁棒性能分析第五章仿真验证与性能分析5.1 仿真模型的建立5.2 仿真结果的分析5.3 鲁棒控制器性能分析第六章结论与展望6.1 研究成果总结6.2 研究不足与展望参考文献。
驱动电机负载模型Hinf(H无穷)鲁棒控制器设计
驱动电机负载模型H∞控制器设计一、引言电动机是指能将直流电能转换成机械能的旋转电机。
电动机按使用电源不同分为直流电动机、交流电动机;按照定子和转子的相对速度可分为同步电机、是异步电机。
作为最常用的驱动执行器,它在车辆中应用广泛,如门窗的起降,自动雨刮器,电动汽车驱动,冷却风扇,发动机起动机等等。
目前电机的控制,尤其是直流电机的控制方法,主要以PID控制和LQR控制为主。
随着汽车性能要求的不断提高,人们越来越关注于系统的稳定性,对于电机的控制也提出了新的要求。
尤其是作为电动汽车的驱动电机,在车辆行驶过程中,特别是高速行驶中,一个微小的摄动可能会对车辆运动产生很大的影响。
在驱动电机工作过程中,由于环境温度变化等工作状况的变动;外部路面干扰;车辆负载突增;老化机械参数变化;建模误差等缘故,会造成模型不精确,也就是模型的不确定性是广泛存在,不可避免的。
因此,需要一种固定的控制器,可以保证模型与实际系统出现偏差时,仍能保持所需的控制品质。
而鲁棒性就是系统的强壮性。
这便引出了使用鲁棒控制来解决电机负载扰动这一问题的讨论。
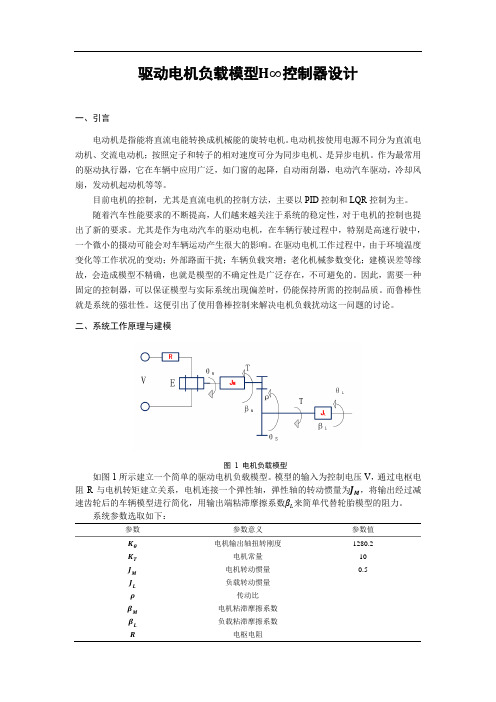
二、系统工作原理与建模图 1 电机负载模型如图1所示建立一个简单的驱动电机负载模型。
模型的输入为控制电压V,通过电枢电阻R与电机转矩建立关系,电机连接一个弹性轴,弹性轴的转动惯量为J M,将输出经过减速齿轮后的车辆模型进行简化,用输出端粘滞摩擦系数βL来简单代替轮胎模型的阻力。
系统参数选取如下:参数参数意义参数值Kθ电机输出轴扭转刚度1280.2K T电机常量10J电机转动惯量0.5MJ负载转动惯量Lρ传动比β电机粘滞摩擦系数Mβ负载粘滞摩擦系数LR电枢电阻建立系统的微分方程。
首先,电机扭矩与电流直接相关:M =K T ×I其中K T 是电机固有参数。
接下来建立驱动电机负载模型的扭矩关系式:J L ×ωL +K θ(θL −θM ρ)+βL ×ωL =0 (1) J M ×ωM =K T ×I −βM ×ωM +K θρ(θL −θM ρ) (2) 设置电机负载系统输入为电压值V ,输出为负载转速ωL ,建立驱动电机负载模型的状态空间方程。
Robust motion Controller Design for High-Accuracy Positioning system高精度定位系统鲁棒运动控制器设计

考虑因素在选择Q(s)的时候。注意,(1 - Q(s))
和Q(s)可以分别被视为一种灵敏度函数和互补的灵敏度函数的速度反馈循环。这个研究已经选择一个三阶二项式滤波器来满足其属性。
在Umeno和Hori[14]中已经提出一般形式和选择二项式过滤器来得到Q(s)。
扰动观测器可以实现的数字化的几种方法。实验结果通过五部分获得将它转换成结构由图5展示,采用双线性变换到G1和G2(s)并将其转换为数字滤波器。前馈摩擦补偿器在后面解释。在[2]中由另一种方式可以实现。
一介绍
现代机械系统,如机床、微电子制造设备、机械手、自动检测机必须由运动控制器支持以确保稳健,高速,和高精度定位/跟踪性能。高生产力通常需要高速操作。精确需求变得更加严格是因为在现代机械设备或微电子产品中组件的大小的变小。这个是通过设置测量精度来实现的。编码器的使用,目标是使误差靠近包含瞬变的编码器分辨率的定位值。鲁棒性不仅仅是暗示鲁棒性的稳定也有性能的稳健性。当动态特性从一个单位变换到另一个在不同操作期间的一个单位的特征的一个重要的要求是避免控制器参数的调节的过于灵敏。
自适应控制的分类_自适应控制的主要类型

自适应控制的分类_自适应控制的主要类型什么是自适应控制1、自适应控制所讨论的对象,一般是指对象的结构已知,仅仅是参数未知,而且采用的控制方法仍是基于数学模型的方法。
2、但实践中我们还会遇到结构和参数都未知的对象,比如一些运行机理特别复杂,目前尚未被人们充分理解的对象,不可能建立有效的数学模型,因而无法沿用基于数学模型的方法解决其控制问题,这时需要借助人工智能学科,也就是智能控制。
3、自适应控制与常规的控制与最优控制一样,是一种基于数学模型的控制方法。
4、自适应控制所依据的关于模型的和扰动的先验知识比较少,需要在系统的运行过程中不断提取有关模型的信息,使模型愈来愈准确。
5、常规的反馈控制具有一定的鲁棒性,但是由于控制器参数是固定的,当不确定性很大时,系统的性能会大幅下降,甚至失稳。
自适应控制的原理框图自适应控制的分类自从50年代末由美国麻省理工学院提出第一个自适应控制系统以来,先后出现过许多不同形式的自适应控制系统。
比较成熟的自适应控制系统有下述几大类。
(1)可变增益自适应控制系统这类自适应控制系统结构简单,响应迅速,在许多方面都有应用。
其结构如图1所示,调节器按被控过程的参数的变化规律进行设计,也就是当被控对象(或控制过程)的参数因工作状态或环境情况的变化而变化时,通过能够测量到的某些变量,经过计算而按规定的程序来改变调节器的增益,以使系统保持较好的运行性能。
另外在某些具有非线性校正装置和变结构系统中,由于调节器本身对系统参数变化不灵敏。
采用此种自适应控制方案往往能去的较满意的效果。
(2)模型参考自适应控制系统(Model Reference Adaptive System,简称MRAS)模型参考自适应控制系统由以下几部分组成,即参考模型、被控对象、反馈控制器和调整控制器参数的自适应机构等部分组成,如图2所示。
自适应控制综述

自适应控制综述标准化管理处编码[BBX968T-XBB8968-NNJ668-MM9N]自适应控制文献综述卢宏伟(华中科技大学控制科学与工程系信息与技术研究所 M0)摘要:文中对自适应控制系统的发展、系统类型、控制器类型以及国内外自适应控制在工业和非工业领域的应用研究现状进行了较系统的总结。
自适应控制成为一个专门的研究课题已超过50年了,至今,自适应控制已在很多领域获得成功应用,证明了其有效性。
但也有其局限性和缺点,导致其推广应用至今仍受到限制,结合神经网络、模糊控制是自适应控制今后发展的方向。
关键字:自适应控制鲁棒性自适应控制器1.自适应控制的发展概况自适应控制系统首先由Draper和Li 在1951年提出,他们介绍了一种能使性能特性不确定的内燃机达到最优性能的控制系统。
而自适应这一专门名词是1954年由Tsien在《工程控制论》一书中提出的,其后,1955年Benner和Drenick也提出一个控制系统具有“自适应”的概念。
自适应控制发展的重要标志是在1958午Whitaker“及共同事设计了一种自适应飞机飞行控制系统。
该系统利用参考模型期望特性和实际飞行特性之间的偏差去修改控制器的参数,使飞行达到最理想的特性,这种系统称为模型参考自适应控制系统(MRAC系统)。
此后,此类系统因英国皇家军事科学院的Parks利用李稚普诺夫(Lyapunov)稳定性理论和法国Landau利用Popov的超稳定性理论等设计方法而得到很大的发展,使之成为—种最基本的自适应控制系统。
1974年,为了避免出现输出量的微分信号,美国的Monopli提出了一种增广误差信号法,因而使输入输出信号设汁的自适应控制系统更加可靠地应用与实际工程中。
1960年Li和Wan Der Velde提出的自适应控制系统,他的控制回路中用一个极限环使参数不确定性得到自动补偿,这样的系统成为自振荡的自适应控制系统。
Petrov等人在1963年介绍了一种自适应控制系统,它的控制数如有一个开关函数或继电器产生,并以与参数值有关的系统轨线不变性原理为基础来设计系统,这种系统称为变结构系统。
最新PID控制简述及发展

P I D控制简述及发展------------------------------------------作者xxxx------------------------------------------日期xxxxDOI:10.3901/JME。
2014。
10。
008PID控制简述及发展1(1。
机械工程学院)摘要:PID控制是自动控制中出现最早、应用最广的一种控制方法。
过程控制系统广泛采用PID控制,它们的性能直接关系到生产过程的平稳运行与产品的最终质量,因而其优化设计具有重要的价值。
现代智能PID控制是将自适应控制、最优控制、预测控制、鲁棒控制和智能控制策略引入到传统PID控制中的一种新型PID控制。
本文回顾了PID控制器的发展历程,介绍了基于模糊控制、专家系统、遗传算法和神经网的智能PID控制器的研究现状并对PID控制今后的发展进行了展望.关键词:PID控制;智能PID中图分类号:TG156A Brief Introduction and Development of PID ControlLI Xin1(1. College of MechanicalEngineering, Yan Shan University, Qinhuangdao 066000)Abstract:PID controlis the earliest, the most widely used inautomatic controlof a kindof control method。
Process control system widely adopted PIDcontro l, their performance is directly related to the smooth running of the production process andthe final quality of products, and its optimization design is of great value。
控制系统中的鲁棒控制与自适应控制比较
控制系统中的鲁棒控制与自适应控制比较控制系统是工程领域中非常重要的一部分,它可以帮助我们实现对各种设备、机器甚至整个工程项目的稳定控制。
在控制系统中,鲁棒控制和自适应控制是两种常见的控制方法。
本文将比较这两种控制方法的特点、应用场景以及优势和局限性。
1. 鲁棒控制鲁棒控制是一种基于鲁棒性理论的控制方法。
鲁棒性理论是指一个系统在面对参数变化、外部扰动或者建模误差等情况下,仍能保持稳定性和性能指标的能力。
鲁棒控制的主要思想是设计一个控制器,使得系统对于不确定性具有鲁棒性。
在实际应用中,鲁棒控制常常被用于那些参数变化较大或者难以准确建模的系统。
它不需要对系统进行精确的数学建模,因此对于复杂的非线性系统而言,鲁棒控制更具优势。
此外,鲁棒控制还能有效应对外部环境的扰动,提高系统的鲁棒性和稳定性。
然而,鲁棒控制也存在一些局限性。
由于鲁棒控制并不依赖于精确的模型,因此无法充分利用系统的内部信息,可能会导致控制性能的下降。
而且,鲁棒控制对于参数变化的追踪能力相对较弱,可能无法满足某些对控制精度要求较高的系统。
2. 自适应控制自适应控制是一种基于系统自身参数估计的控制方法。
它能够根据实时的系统状态和输入输出数据对系统进行建模和参数调整,从而根据系统的动态变化来实时调整控制器的参数。
自适应控制的主要思想是利用自适应算法,使系统能够在不确定性和变化的环境下保持稳定性和控制性能。
自适应控制常常应用于那些系统具有参数变化或者外部扰动较大的情况下。
它能够自主估计系统的动态特性,并根据估计结果实时调整控制器的参数,从而提高系统的控制性能和鲁棒性。
自适应控制具有较强的参数追踪能力,可以满足对系统精确控制的要求。
然而,自适应控制也有一些限制。
首先,自适应控制需要进行较为复杂的参数估计和计算,对计算能力的要求较高。
其次,自适应控制受限于参数估计的精度,当参数估计存在误差时,控制器的性能可能会受到影响。
此外,自适应控制对系统动态的变化要求较高,如果系统的变化速度过快或者存在较大的不确定性,可能会导致自适应控制的稳定性下降。
永磁同步电机滑模变结构鲁棒控制

永磁同步电机滑模变结构鲁棒控制崔家瑞;高江峰;张波;李擎【摘要】A sliding mode variable structure speed controller was proposed for surface permanent magnet synchronous motor in order to overcome the drawback of conventional PID speed controller,to effectively curb the state variables of overshoot problems, to speed up the convergence speed of the rotor, and to en-hance the anti-interference of the system.Unlike conventional PID speed controller, the controller associ-ated speed error with the quantity of system state.The load torque values is real-time controlled by the default upper and lower bounds sliding mode variable structure controller.It can replace the conventional PID controller with the applications to the permanent magnet synchronous motor vector control system. Simulation and experimental results show that sliding mode variable structure controller based on the up-per and lower bounds can effectively improve the static and dynamic characteristics and robustness of the system.%为了克服常规PID速度控制器的缺点,有效抑制状态变量的超调问题,加快转子的收敛速度,增强系统的抗干扰性,提出了一种用于表面式永磁同步电动机的上下界滑模变结构速度控制器。
自适应控制概述
• 在控制系统的运行过程中,
– 系统本身不断地测量被控系统的状态、性能 和参数,
– 从而“认识”或“掌握”系统当前的运行指 标并与期望的指标相比较,
– 进而作出决策,来改变控制器的结构、参数或 根据自适应规律来改变控制作用,
以保证系统运行在某种意义下的最优或次优状态.
• 按这种思想建立起来的控制系统就称为自 适应控制系统.
敛性分析
• 80年代初期--Goodwin等人的基于随机过程鞅 (martingle)理论的参数收敛性和控制的稳定性及最优 性分析
• 90年代初--Chen和Guo的自校正调节器参数收敛性分 析
自适应控制的鲁棒性分析及鲁棒自适应控制
• 80年代初期--Rohrs的自适应控制系统的鲁棒性分析
• 出于实际控制系统设计和应用的需要,以及 微处理器等计算工具或器件的迅猛发展,都 为自适应控制应用的发展创造了条件,这又 反过来促进了自适应控制理论的发展.
1) 变增益控制
• 这种系统的结构如图1所示,其结构和原理比 较直观,调节器按被控系统的参数已知变化 规律进行设计.
• 当参数因工作情况和环境等变化而变化时,通过能测量到反映系 统当前状态的系统变量,比照对系统的运行的要求(或性能指标), 经过计算并按规定的程序来改变调节器的增益结构.
– 这种系统虽然仅仅是对增益的变化进行自适应调节,难以完 全克服系统模型未知或模型参数变化带来的影响以实现完善 的自适应控制,但是由于系统结构简单,响应迅速,所以在许多 实际系统中得到应用.
• 传统控制方法在模型参数不确定时的应用情况
– 传统控制系统对于模型内部参数不确定性和外部扰动 的影响有一定的抑制能力,但常常是以牺牲性能为代 价的。
自适应控制和鲁棒控制

参考模型
外回路 参数调整 u 控制器 内回路 em
ym
r
y
过程
图7-8模型参考型自适应控制系统
• 参数最优化方法;基于李雅普诺夫稳定性理论的方法; 利用超稳定性来设计自适应控制系统的方法。 • 模型参考型自适应控制方法的应用关键是,如何将一类 实际问题转化为模型参考型自适应问题。在过程控制中 应用也不断发展,如用于间歇反应器的程序控制,可取 得良好效果。
•
•
• •
适应控制自诞生以来,一直是控制界的热点,但是, 除了简单适应控制系统以外,各种复杂的适应控制系 统未能在工业上进一步推广。原因主要有: 适应控制是辨识与控制的结合,但两者有一个难解决 的矛盾,辨识需要有持续不断的激励信号,控制却要 求平稳少变,已有人考虑过一些办法,然而实际上未 能解决; 适应控制中,除了原来的反馈回路外,还增加了调整 控制算法的适应作用回路,后者(外层回路)常常是 非线性的,系统的稳定性有时无法保证; 要知道对象模型阶数,这在实际上往往难以做到; 辨识模型因结构固定,只能反应实际模型参数不确定 性,且对时滞及其变化十分敏感。有人评价,适应控 制成绩不小,问题不少,总的来说,还需要新
2. YEWSERIES-80自整定PID控制器
知识库 响应曲线 控制目标类型 调整规则
推
理
SV
PID控制
MV
控制 对象
PV
图7-6 STC的结构图
• 知识库:相当于一部PID参数整定的选择手册。 • 响应曲线:根据设定值SV、测量值PV、控制器 输出值MV的变化情况,经过推理所得到的过程 响应曲线。 • 控制目标:
• 专家系统STC随时观察测量值、设定值和控制器 输出信号。当控制偏差超过临界值时STC启动, 控制器开始观察测量信号的波形,并将其与已存 入专家STC知识库中的十几种响应曲线加以对照。 知识库中的响应曲线为目标整定波形,根据不同 的整定目标,按最佳条件进行整定。 • 在判别测量信号的波形与目标整定波形的一致程 度时,以信号的超调量和衰减比作为评价的指标 标准,即只要测量信号波形的这两个指标满足目 标曲线,就被看作为是最佳整定,否则控制器就 要进行PID最佳参数值的计算。 • 控制器内存有100多种可供选用的整定规律,使 控制器可以按照响应特性或响应特性的发展趋势 从中选择最佳整定规律。
具有超稳定结构的鲁棒自适应控制器

具有超稳定结构的鲁棒自适应控制器的报告,800字
本文旨在介绍一种具有超稳定结构的鲁棒自适应控制器(RRAC)。
首先,将对RRAC结构进行概述,将其与传统的自适应控制器进行对比,然后将介绍RRAC的可行性及应用
示例,最后,将对其发展前景进行预测。
首先,RRAC是一种具有超稳定结构的鲁棒自适应控制器,其中鲁棒指系统可以在模糊不确定环境中正确工作。
RRAC的结构有许多独特之处,包括可定制的控制策略、自我恢复能力强的方法、自适应参数优化算法等。
这些结构构成的新型自适应控制器与传统的自适应控制器相比,其响应速度更快、准确性更高。
RRAC由新一代的实时自适应管理器支持,具有比传统的自适应控制器更好的补偿和控制调节能力。
RRAC的可行性和应用示例也被证明是可行的。
目前,RRAC 已经有效地应用于航空、航天、电力、医疗和汽车等行业领域。
作为一种可补偿多种系统误差的通用控制策略,RRAC可以有效地实现非线性系统的有效调节和运行。
它的稳定性、鲁棒性和自适应性都得到了极大的提高。
此外,RRAC的发展前景也预示着它会继续在未来发挥重要作用。
随着相关技术的发展,RRAC将进一步发挥其自适应控制和鲁棒控制的优势,使得系统具有更好的鲁棒性和稳定性。
在未来几年,RRAC将有望继续发挥重要作用,在复杂的环境中发挥良好的作用。
综上所述,RRAC是一种具有超稳定结构的鲁棒自适应控制器,
具有比传统的自适应控制器更快的响应速度、更高的准确性,以及更好的可补偿多种系统误差的通用控制策略。
RRAC的可行性和应用示例已经得到证明,未来它也将继续发挥重要作用,使得系统具有更好的鲁棒性和稳定性。
鲁棒性

设计
正交阵列
损失函数
信噪比
损失函数
损失函数是一个二次式,用来估算均值相对于目标值及产品性能的偏差所带来的成本,这种成本是依据用户 认为的产品缺陷,引起的经济损失得来的。传统的方法仅在产品性能超出用户规格要求时,才计算这种损失。鲁 棒设计方法在目前产品性能分布(均值附近的分布)的基础上估算这种损失。
正交阵列
正交阵列有几个独特的性质。它们可以在几个范围内作用,但最通常的是在两或三个范围内。它们最重要的 一个属性是平衡性:当一列中范围是常数,其它列中的所有其它范围将通过它们的值旋转得到。通过运用阵列的 这种平衡性,能有效地确定各因素的影响。
信噪比
信噪比是鲁棒设计实验输出性能偏差的衡量。信噪比(S/N)的目的是把输出性能的重复性表示成一个数。然 后可对这个数进行相似的处理,如粘合强度例子中,为提高均值而进行的分析一样。
产生要优化的产品或设计的界限是很重要的。实验应限制在设计的一个小范围内。换句话说,实验不应试图 对产品或工艺的所有步骤进行优化。
2.小组的创立与平稳。应挑选一个项目小组来进行实验和分析。小组应该由具有产品和工艺知识的人员组 成,并征求与优化设计有关的所有人员的意见。他们没有必要对与问题有关的学科有深入的技术上的了解,但小 组成员应该有进行类似设计的经验。小组应该能通过统计员或曾受过鲁棒设计训练的人员获得统计方法知识和特 殊的鲁棒设计技术。
稳定鲁棒性:一个控制器如果对集合P中的每一个对象都能保证系统稳定则是鲁棒稳定的。
品质鲁棒性:一个控制器如果对集合P中的每一个对象都能保证系统稳定和一种特定品质则认为是品质鲁棒 的。
鲁棒控制
鲁棒控制
鲁棒控制是一个着重控制算法可靠性研究的控制器设计方法。鲁棒性一般定义为在实际环境中为保证安全要 求控制系统最小必须满足的要求。一旦设计好这个控制器,它的参数不能改变而且控制性能保证。