MM_at_System_Initialization
电机控制开发套件motorBench 2.25说明书
Dashboard/…/motorBench 2.25 ReleasemotorBench 2.25.0 Release NotesCreated by Fernando Garibaldi, last modified by Jason Sachs 2 minutes agoOverview of motorBench® Development SuiteWhat’s NewSystem RequirementsSupported HardwareHigh-voltage hardwareOther hardware required with both low-voltage and high-voltage setupsInstalling motorBench® Development Suite 2.25.0RepairsMotor Control Fixed IssuesChanges since revision 2.15Known IssuesMotor Control IssuesLimitationsSupported DevicesSoftware LimitationsMotor Control LimitationsSupported Motor ParametersCustomer SupportThe Microchip Web SiteAdditional SupportOverview of motorBench® Development SuiteMicrochip motorBench Development Suite is a graphical, interactive development environment designed to help motor control engineers to design and implement motor control systems, from very basic to very sophisticated ones.motorBench® Development Suite allows the user to:configure a motor systemmeasure motor parameterstune the controller gainsgenerate code to spin the motorWhat’s New1. Motor Control Application Framework (MCAF) R5 – see MCAF User's Guide for more information.a. Added support for dsPIC33CK256MP508b. Added Angle-tracking PLL (ATPLL) supportc. Improved Customize page support in motorBench2. Customizea. Allow advanced customization of MCAF code generation3. Measurea. Updated fault handing logic to detect if an invalid load is connected to the inverter before starting motor parameter measurement or Board calibrationb. Improvements to support motors with large values of stator inductancec. Improvements to support motors with large inertia and high cogging torque4. MCC Integrationa. Improved support for MCC-generated peripheral and system initialization code5. Device Supporta. Added support for dsPIC33CK256MP508i. This device is not yet supported by the motor parameter measurement featureSystem RequirementsMPLAB X 5.30 or later.XC16 compiler version:Firmware generated by motorBench® Development Suite has been tested with XC16 1.41.33EP devices: XC16 1.36 or later are expected to work with motorBench®Development Suite but have not been extensively tested.33CK devices: Either of the following is required:XC16 1.50 or laterXC16 1.41 with DFP 1.2.66 or laterMPLAB Code Configurator®(MCC) Plugin Version 3.95.0 or laterPIC24/dsPIC33/PIC32MM library 1.166.0 or laterSupported HardwareThis release of motorBench®Development Suite supports both low-voltage and high-voltage setups.Low-voltage hardware1. dsPICDEM MCLV-2 Development Board [Part Number: DM330021-2]2. dsPIC33EP256MC506 External Op Amp Motor Control PIM [Part Number: MA330031-2] with silicon revision A8 or dsPIC33CK256MP508 External Op Amp Motor Control Pim[Part Number: MA330041-1].3. A three phase PMSM or BLDC motor that is compatible with 24V, such as the Hurst 24V BLDC motor DMA0204024B101 [Part Number: AC300022].4. 24V power supply [Part Number: AC002013] - ensure this connects to AC mains using a 2-prong cable. If you have an AC002013 with a 3-prong cable, please contact Microchip.High-voltage hardware1. dsPICDEM MCHV-2 Development Board [Part Number: DM330023-2] or dsPICDEM MCHV-3 Development Board [Part Number: DM330023-3]AC mains voltages 120VAC 60Hz and 220VAC 50Hz have been tested.2. dsPIC33EP256MC506 External Op Amp Motor Control PIM [Part Number: MA330031-2] with silicon revision A8 or dsPIC33CK256MP508 External Op Amp Motor Control Pim[Part Number: MA330041-1].3. A three phase PMSM or BLDC motor that is compatible with rectified AC mains voltage, such as the Leadshine 400W BLDC motor EL5-M0400-1-24 [Part Number: AC300025].Other hardware required with both low-voltage and high-voltage setups1. A USB-to-logic-level-UART converter from the following list:a. Saelig USB-COM-U or USB-COM-U13b. TRENDnet TU-S9 v2.02. Programming tool - one of the following tools: Real ICE, ICD33. Board calibration load resistors - this is optional, please see motorBench® Development Suite User's Guide document for more detailsInstalling motorBench ® Development Suite 2.25.0To install the MPLAB ® Code Configurator v3.95 Plugin1. In the MPLAB® X IDE, select Plugins from the Tools menu2. Select the Available Plugins tab3. Check the box for the MPLAB® Code Configurator v3, and click on InstallTo install different peripheral library version or motorBench ® Development Suite version when connected to internet1. Create a project with dsPIC33EP256MC506 or dsPIC33CK256MP508, or use the sample project.2. Open MPLAB® Code Configurator3. In the Versions tab under PIC24/dsPIC33/PIC32MM MCUs, find the multiple library versions (loaded version is indicated by the green check mark)4. Right-click on the required version of the library and select Mark for Load5. In the Versions tab under motorBench ® Development Suite find the multiple library versions (loaded version is indicated by the green check mark)6. Right-click on the 2.25.0 version of the library and select Mark for Load7. Click on Load Selected Libraries button to load the marked libraries.To install different peripheral library version or motorBench® Development Suite version when not connected to internet1. In the MPLAB® X IDE, select Options from the Tools menu2. Select Plugins tab3. Click on Install Library4. Add pic24-dspic33-pic32mm_v1.166.mc3lib5. Add motorBench_2.25.0.mc3lib6. Restart MPLAB® X IDERepairsMotor Control Fixed IssuesChanges since revision 2.15The following aspects of motorBench® Development Suite and the Motor Control Application Framework (MCAF) have been updated:MCAF has been updated to R5, includingChanges in R2:Support for DC link compensationSupport for overmodulationSupport for wider range of low-voltage motorsUpdated HAL for future MCHV2 supportUpdated Motor Control LibraryNumerous minor fixesChanges in R3:MCC system module compatibilityMCHV-2 and MCHV-3 supportInverter maximum current now has a 1:1 ratio with the maximum commanded dq-frame current of the drive, operating in FOC (in R2 this incorporated a deratingfactor)Other minor fixesChanges in R4:MCC peripheral supportParameter customizationQuadrature encoder supportAdded new startup method (Weathervane startup)Other minor fixesChanges in R5:Added device support for dsPIC33CK256MP508Added Angle-tracking PLL (ATPLL) sensorless estimatorImproved motorBench Customize page supportOther minor fixesSections in this release notes affected:Other RequirementsLimitationsSupported Motor ParametersKnown IssuesPlease note:We do not recommend using the MCP2200 USB to RS232 Demo Board [Part number: MCP2200EV-VCP ] with this release of motorBench® Development Suite.While testing, we have observed more frequent occurrence of a serial communication timeout issue while running motor parameter measurement using this cable.See Known Issues section of this document for more information (MCGUI-1141)Motor parameter measurement is only supported on dsPIC33EP256MC506 device.Issue Key Summary WorkaroundMBPLAN-673Serial port does not get closed programmatically when MCC exits during motor parametermeasurementIf you exit SC during execution, restart MPLAB X.MBPLAN-932Exception during attempted creation of a runtime properties class No workaround needed, this issue doesn't have an impact on thefunctionality.MBPLAN-984Improve error reporting for SC build errors in the event of a code generation failureMBPLAN-1095Switching projects after loading motorBench erroneously allows motorBench code to generate for new projectMBPLAN-1160"Import Motor" and "Export Motor" buttons can be clicked multiple times, opening multiple dialog boxesMotor Control IssuesIssue Key SummaryDB_MC-411Current calibration happens only once (at part reset) rather than upon entry to MCSM_RESET stateDB_MC-560Speed controller exhibits chattering behavior at voltage saturation hysteresis boundary (MCAF)DB_MC-978"Soft start" gate drive in board_service.c has duty cycle that is too smallDB_MC-1092PLL estimator may not converge into rotor reference frame while using the Classic startup method in MCAFDB_MC-1396PLL calculations in code generation do not allow motor.velocity.nominal to be more than 1250Hz electrical (=20kHz/8/2)DB_MC-1415With some motors and 12V operation, increased velocity margin improves startup but creates unstable estimatorDB_MC-1430Quanum MT4012 unstable in closed-loop operation at 4200 RPM speed and aboveDB_MC-1491With Quanum MT4012, MCAF may not detect stallDB_MC-1492Quanum MT4012 Stalls on pressing 'S3'(reverse) at low speeds and on changes to speed command potentiometerDB_MC-1495Anaheim BLY342D-24V-3000, BLY342D-48V-3200 motors creates hardware over-current during stall-detect testingDB_MC-1521Closed loop speed step response overshoot - MCHV2, Leadshine 400DB_MC-1892Some motors with extreme parameters may produce out-of-range error for stall_detect.group.timerCountsVarianceDetect (detected in Monte Carlo analysis)DB_MC-1920Board service isrCount-based timing is not guaranteedDB_MC-1922LED patterns not displayed when in the TEST_DISABLE or TEST_ENABLE statesDB_MC-2122BLWS232D motor startup in QEI mode causes a false detect for stall-detectionDB_MC-2213Deadtime needs to be changed in both MCC and motorBench to affect codeDB_MC-2275Large current rampup times may not start (STARTUP_TORQUE_RAMPUP_RATE = 0)DB_MC-2309QEI tracking loop Kp and Ki produce out-of-range errors for low-speed motorsDB_MC-2323Weathervane transition state should not have active damping enabledDB_MC-2387DC link voltage measurement may have too much phase delay for MCAF DC link compensation to work effectivelyDB_MC-2606MCC-generated code has incorrect IESO/FNOSC config bits for 33CKDB_MC-2671MCAF_CaptureTimestamp calls incorrect timer function for 33CK devicesDB_MC-2785Current sense signal integrity issue with 33CK during overmodulationLimitationsSupported DevicesmotorBench® Development Suite supports these devices:1. dsPIC33EP256MC5062. dsPIC33CK256MP508Software LimitationsmotorBench® Development Suite is tested for serial communication using Windows 7 and Windows 10 platforms. Other platforms may work with standard baud rates, but this operation has not yet been verified.Motor Control LimitationsFollowing are the known limitations for this release of motorBench® Development Suite:1. One mechanical load - constant load. This represents a mechanical load with constant inertia, viscous damping, and friction. The velocity control loop can generally rejectexternal disturbance torques, within the rated current of the motor and board, and within the bandwidth of the velocity control loop. Mechanical loads with time-varying or angle-varying inertia, viscous damping, and friction, such as a blower, compressor, or pump, are currently not supported.2. One motor type - PMSMMCLV-2:The reference motor is the Nidec Hurst motor DMA0204024B101 (MicrochipDirect part number AC300022). Microchip has also validated motorBench® DevelopmentSuite (including motor parameter measurement) with motors with parameters plotted below. Please also read the following section on Supported Motor Parameters. IfmotorBench® Development Suite is unable to spin a motor successfully, please contact Microchip staff for additional assistance.(Note: Mechanical time constant (2/3)×JR/Ke² represents the time constant of velocity acceleration under an open-loop synchronous-frame voltage step, neglecting the effects of inductance, with J, R, and Ke expressed in canonical metric units. R is expressed as line-neutral resistance = half of line-line resistance, and Ke is expressed as V/(rad/s) line-neutral zero-peak = Vrms/KRPM (line-line) × 0.007796968)MCHV-2/MCHV-3:The reference motor is the Leadshine 400W motor EL5-M0400-1-24 (MicrochipDirect part number: AC300025). Microchip has validated motorBench® DevelopmentSuite (including motor parameter measurement) with motors with parameters plotted below. Please also read the following section on Supported MotorParameters. If motorBench® Development Suite is unable to spin a motor successfully, please contact Microchip staff for additional assistance.3. Boarda. dsPICDEM™ MCLV-2 development board. This release of motorBench® Development Suite is compatible with modifications to the board to alter its rated current orvoltage. Contact your local Microchip office to obtain the document "Using MCLV-2 with motorBench® Development Suite to support alternative current and/or voltageratings", which provides guidance for such modifications. Other modifications may not be compatible.b. dsPICDEM™ MCHV-2 and MCHV-3 development boards. This release of motorBench® Development Suite is compatible with unmodified MCHV-2 and MCHV-3development boards.4. Motors should be well-matched to the board and operating voltage. The nominal DC link voltage of the MCLV-2 board is 24V. This voltage can be changed by cutting jumperJ6 and using an appropriate power supply connected to the appropriate terminals of J7. Use of a mismatched motor (for example, a 12V motor used with a 24V DC link voltage) may cause a hardware over-current fault; in this case motor parameter measurement may fail with the message "Fault Code #10: Undefined Fault". Retry with an appropriate DC link voltage.5. Two PIMs and Two devices - dsPIC33EP256MC506 External OpAmp PIM with silicon revision A8 or dsPIC33CK256MP508 External OpAmp PIM. (Please see the HardwareSetup section of the motorBench User's Guide for important modifications to dsPIC33EP256MC506 External OpAmp PIM for use in MCHV-2 and MCHV-3.)6. One algorithm - FOC7. Estimators - PLL, QEI, ATPLL8. Motor parameter measurement:a. Performance criteria adjustment is not presently supported. This includes adjustment of phase margin and PI phase lag at crossover in the current loop; Microchip hasnot completed validation and documentation of these adjustments.9. Autotuning:a. Performance criteria adjustment of the current loop is not presently supported. This includes adjustment of phase margin and PI phase lag at crossover; Microchiphas not completed validation and documentation of these adjustments.b. Use of performance criteria adjustment of the velocity loop is not fully documented or tested. We recommend not adjusting phase margin or PI phase lag unlessnecessary; cases where this is likely to occur are large inertias where αJ = JR/LK m2 > 10, for which an increase of phase margin is appropriate. Phase margin valuesbetween 70 and 85 degrees are recommended in this case, with larger values providing additional stability at the cost of lower velocity bandwidth.10. Axis management not currently implemented - supports only one axis.11. Code generation:a. PWM switching frequency is fixed at 20kHz and does not reflect the value entered under Board parametersb. Integration with external user-supplied code may involve substantial changes. Some guidelines for this are given in the documentation for the Motor ControlApplication Framework. While it is possible to integrate the code generated from motorBench® Development Suite with external code, it is the responsibility of the end user to validate this combination.12. Required compiler settings:a. Optimization-O1 or greater; -O0 and -Os will both compile without errors but do not execute fast enough to complete within the 50 microsecond ADC ISR. Note: at higheroptimization levels, in-circuit debugging using MPLAB X will behave unreliably with respect to breakpoints and single-stepping through C code.The "Omit frame pointer" and "Unroll loops" settings must be enabled.b. Memory model:Large data model (handles using pointers, not direct addressing, to allow for more than 8K of program variables)Small scalar modelc. Additional options:-Wno-volatile-register-var -finlined. Test harness: In order for the test harness to be enabled, the symbols MCAF_TEST_PROFILING and MCAF_TEST_HARNESS should be defined.13. Recommended compiler settings:a. Additional options:-WundefSupported Motor ParametersSince version 2.15, motorBench®Development Suite supports a wide range of motors, subject to the following notes:Ranges of motor parameters (including rated values and computed metrics) must be within the limits noted in either range-limits-mclv2.html or range-limits-mchv2.html.These ranges were tested to ensure that code generation produced firmware constants that were within bounds.Motor parameter measurement does not need to complete successfully but valid motor parameters are required. Some motors may have too low of an inductance or resistance, and may fail motor parameter measurement.Other particular issues that may cause incompatibility with motorBench®Development Suite includeLarge inertia values – in this case, increasing voltage loop phase margin may prevent stability problems. (See "Autotuning" in the Limitations section of this document.) Rotor magnetic saliency – if there are significant differences between Ld and Lq (>10% difference) then some of the MCAF algorithms may not work optimally. Highermismatch between Ld and Lq is typically found in interior-permanent magnet (IPM) motors, and is an intentional feature of the design. See the MCAF User's Guide for more information.Large back-EMF harmonics – a quasi-sinusoidal back-emf is assumedIssues involving individual motor control algorithms, such as PLL estimator, motor startup, or stall detectionHigh cogging torqueMismatch between motor and drive (namely using a motor with current and/or voltage requirements significantly different from that of the hardware) Microchip cannot guarantee that motorBench®Development Suite will work correctly with all motors. If a particular motor does not work properly, please contact the MCU16 Motor Control Team for further guidance.Customer SupportThe Microchip Web SiteMicrochip provides online support via our web site at . This web site is used as a means to make files and information easily available to customers. Accessible by using your favorite Internet browser, the web site contains the following information:Product Support – Data sheets and errata, application notes and sample programs, design resources, user’s guides and hardware support documents, latest software releases and archived softwareGeneral Technical Support – Frequently Asked Questions (FAQs), technical support requests, online discussion groups/forums (), Microchip consultant program member listingBusiness of Microchip – Product selector and ordering guides, latest Microchip press releases, listing of seminars and events, listings of Microchip sales offices, distributors and factory representativesAdditional SupportUsers of Microchip products can receive assistance through several channels:Distributor or RepresentativeLocal Sales OfficeField Application Engineering (FAE)Technical SupportCustomers should contact their distributor, representative or field application engineer (FAE) for support. Local sales offices are also available to help customers. A listing of sales offices and locations is available on our web site.Technical support is available through the web site at: 。
Pioneer Plus IVUS-guided re-entry catheter用户手册说明书

Quick referenceSystem setupPrepping the catheter Step-by-step procedureTroubleshooting guidePioneer PlusIVUS-guided re-entry catheterE x t e n d e d n i t i n o l n e e d l eI V U S t r a n s d u c e rN e e d l e d e p t h m a r k e r s N e e d l e s t o p r i n g w i t h l o c kN e e d l e g u i d e w i r e l u m e nC o n n e c t o r f o r I V U S c o n s o l eH a n d l eN e e d l e d e p l o y m e n t w i t h a u t o l o c k r i n gSystem setup3 Prepping the Pioneer Plus catheter5 Step-by-step procedure11 Backloading12Introducing 12Use IVUS to precisely target13 re-entry into the true lumenExchanging Pioneer16 Plus catheterTroubleshooting guide:17 catheter tracking challengesInsertion into sheath18Tracking through the lesion19Troubleshooting guide:21 guidewire challengesLoading needle guidewire22Advancing wire out of needle22Exchange confusion due24 to multiple guidewires123System setupConfirm all necessary devices and equipment are in the lab before starting the procedure:1 Pioneer Plus catheter.2 Philips Volcano IVUS console andPatient Interface Module (PIM).3 Sterile cover/bag for IVUS PIM.4 10-cc syringe and RHV or Tuohy-Borst.5 0.014" nonhydrophilic guidewires withlong-coil transition (300 cm and 190 cmipsilateral/two 300 cm contralateral).Plug in and turn on Philips Volcano IVUS unit at start of procedure—system initialization takes ˜2 min.• IVUS settings:–Gain: 52–58–Diameter:–SFA: 10–12–ILIAC: 14–16–ChromaFlo: 3–5Confirm vascular sheath size is appropriatefor Pioneer Plus catheter use (6F or larger).456Prepping the Pioneer Plus catheter1 Remove the Pioneer Plus catheterfrom the box.2 Place plastic tray on sterile prep table.Carefully remove the Pioneer Plus catheter and all contents from the plastic tray.3 Inspect catheter for any manufacturingdefects or damage that may have resulted from shipping.4 Attach the white “winged” rapid exchangeflush adapter to a 10-cc syringe.5 Place the sterile plastic bagover the IVUS connector.6 Attach a Tuohy-Borst adapter orrotating hemostasis valve to the proximal luer on the handle.7 Set the needle stop to “7” and deploy theneedle to confirm needle movement.7a. Flushing rapid exchange lumenb. Flushing needle lumenVerify needle movement in and out of catheter shaft.8 Flush both lumens with heparinizedsaline as illustrated below:a. T he rapid exchange lumen requires the use of the white “winged” adapter. Gently insert tip of catheter into adapter until a snug fit is achieved and flush. Repeat before use, if necessary.b. N eedle lumen is flushed through theproximal handle luer with a 10-cc syringe. Use a stopcock or luer cap after flushing89 Insert PIM into the sterile bag. ConnectPioneer Plus catheter to the PIM andverify system recognizes catheter.The Pioneer Plus catheter works with the Philips Volcano s5 Series or CORE series ofPhilips Volcano systems. If an IVUS image is not obtained or is unsatisfactory, consult the Philips Volcano s5 Series or CORE Series of Systems Operator’s Manual supplied by Philips Volcano.10 Insert 300 cm guidewire* into needlelumen; place a 90º angle on wiretip. Retract needle first, then retractwire and reflush needle lumen.Carefully tighten the rotating hemostasis valve around the needle guidewire and close off the side port with a closed end cap of stopcock. Warning: ensure that the needle, Stop Ring and Deployment Ring are fully retracted prior to and during the introduction of the catheter into the peripheral vascular system.*Needle wire mustbe nonhydrophilicwith long-coiltransition.Step-by-step procedureIntroducing and advancing the Pioneer Plus catheter to the lesion1 Introduce the Pioneer Plus catheter into theperipheral vascular system using clinically accepted percutaneous techniques. Guide the catheter over the previously placedsupport 0.014” (0.36mm) tracking guidewire already in the vessel by “back-loading” the tracking guidewire into the guidewire lumen in the distal tip.2 Introduce Pioneer Plus catheter intovascular sheath and advance to the lesion. If tracking over the aortic bifurcation, make sure the curvature of the needle housing is in line with the curvature of the sheath.–Slight rotation of the Pioneer Plus catheter or balloon dilatation may be required toadvance the Pioneer Plus catheter.i.ii.iii.3 Use IVUS to precisely target re-entryinto the true lumena. O nce past the lesion, turn on the ChromaFlo feature and rotate thePioneer Plus catheter so the truelumen is at the 12 o’clock position.b. C onfirm catheterposition is correctusing fluoroscopy toidentify curvatureof needle housing.Tip: to ensure continuity of imaging, support the PIM connector extension with the hand that is rotating the Pioneer Plus catheter.4 After confirming catheter orientation, setthe needle stop (“3” for popliteal, “5” for SFA, “7” for iliac).5 Thumb-activated safety lock:Rotate needle deployment ringclockwise and deploy needle.6 Under fluoro, slowly advance needleguidewire out of needle—if you feelno resistance to wire movement,continue advancing wire into targetvessel lumen. However, if resistanceis felt, stop wire movement. Retractneedle slightly and advance wire.–If unsuccessful, retract the needle, then needle guidewire and repeat the stepsin this section. The catheter may requireslight advancement before additionalattempts to deploy needle.(Note: the needle must be retractedbefore retracting the needle guidewire.)Exchanging Pioneer Plus catheter7 Following successful true lumen access,retract the needle. Remove the subintimal tracking wire.8 Disconnect the Pioneer Plus catheterfrom the PIM.9 Back the Pioneer Plus catheter off ofneedle wire using short, smoothstrokes. This will leave the 0.014”needle guidewire in the true lumen.Catheter tracking challengesCatheter tracking challenges1 Shortly after introducing the PioneerPlus catheter into the femoral sheath,you feel significant resistance. Whatare the most likely causes?–The wrong sheath size may be in place—the system requires a 6F (2.2 mm) sheath.Although the catheter tip may passthrough a smaller sheath size, at the pointwhere the tracking wire exits the PioneerPlus catheter, the combined volume ofthe catheter shaft and guidewire willfit only through a 6F or larger sheath.–The catheter orientation may be such that resistance to tracking is maximized.The needle housing has a fixed curvature;significant resistance may occur if thecurvature of the needle housing isopposite that of the vascular sheath.–The tracking guidewire may needto be wiped clean or the trackinglumen may need to be flushed. Anybuildup of blood or other foreignmatter on the tracking guidewire caninduce resistance to movement.–The tracking guidewire or sheath may be kinked and should be replaced.2 After the Pioneer Plus catheter hasbeen advanced past the distal end ofthe sheath, significant resistance is feltwhile tracking through tissue, and thePioneer Plus catheter has reached a pointwhere further forward movement seemsimpossible. What are the possible causes?–The tracking wire may be kinked.–The Pioneer Plus catheter handle may be caught on a rigid section of the table.–The tissue morphology may be such that there is resistance to the catheter,inhibiting forward movement. Thisis especially true in highly calcifiedocclusions. If tissue resistance is believedto be the cause, a small-diameterballoon may be used to dilate the tissue.Remember, this is a technique commonlyutilized in subintimal angioplasty,and if the Pioneer Plus catheter isadvanced through significant resistancewithout adequate predilatation, theIVUS component may be terminallydamaged and/or the needle may kink.1920Guidewire challenges21Guidewire challenges1 While loading the needle guidewire into theneedle lumen, significant resistance is met.What are the most likely causes?–The needle guidewire tip may becaught on a joint within the lumen. Tryspinning gently or loading a straight-tipguidewire (unshaped) to advance pastthe joint. Use of a guidewire introducer isrecommended.–The needle guidewire size may be too large for the lumen. The needle lumen iscompatible only with a 0.014" guidewire.–The needle lumen may be blocked witha clot or other foreign debris. While stillex vivo, reflush the lumen with a 10-ccsyringe or smaller to clear any blockages.–The needle guidewire may need tobe wiped clean. Any buildup of bloodor other foreign matter on the needleguidewire can induce resistance tomovement.–The needle guidewire may be kinked and needs to be replaced.2 Following needle deployment, the needleguidewire will not pass into the targetvessel. What are the potential causes?–The needle tip could be against thefar wall of the vessel. Retract theneedle slightly while attempting togently push the wire forward until thewire freely moves into the vessel orthe needle is completely retracted.22–Angiographic interpretation utilizing orthogonal views with the wire advanced to the point of resistance (for visualization purposes) may demonstrate if the needle is short of the target. In the latter case,the needle should be advanced farther.–The wrong target may have been elected.Verify location of the needle/guidewirewith IVUS and multiple fluoro views.–Although the IVUS shows a patent vessel, the needle exits the catheterapproximately 7 mm behind the IVUStransducer, so the needle may be justproximal to the patent target vessel.–The target must be parallel to the Pioneer Plus catheter for the IVUS imaging planeto match the needle exit 7 mm proximal. In some instances, the catheter is positioned in a spiral dissection, so the imagingis in a different plane than the target.Advance the catheter so that the targetand catheter are parallel throughout theIVUS transducer/needle exit separation. If necessary, remove the catheter completely and create a more ideal dissection plane with the Glidewire/Glidecatheter.–Severe calcification, generally visible under fluoro and/or IVUS, may inhibitintimal needle penetration andsubsequent guidewire advancement. If this appears to be the case, advance or retract the Pioneer Plus catheter to a differentlocation along the patent true lumen in an attempt to find a less calcific “window.”233 Exchanging the Pioneer Plus catheterseems to be difficult. What are thelikely causes?–The long needle lumen and thetight tolerances between the needlelumen and the needle guidewiremake the exchange difficult.–If the catheter is still connected to the PIM, exchanging the catheter can bedifficult. Therefore, make sure the IVUSconnector is disconnected from the PIMbefore exchanging the catheter. Makesure that the Pioneer Plus connector isreplaced in the sterile bag provided.–The presence of the tracking wire can make the exchange confusing. Somephysicians use tape to identify thedifferent guidewires. Once the positionof the secondary guidewire (needleguidewire) is confirmed to be in the truelumen, the tracking wire can be removed.–If the Pioneer Plus catheter binds on the needle guidewire, stop and advancethe needle wire as far as possible, thenpull the Pioneer Plus catheter with theneedle guidewire back slightly, andtry to exchange again. If the problempersists stop immediately to preventfurther binding of the needle guidewire.If the issue is not resolved, the needlewire may be kinked. Remove the system(Pioneer Plus catheter together withneedle wire) for inspection. Removethe needle guidewire, and re-prep thecatheter with a new wire before repeatingthe true lumen return procedure.24IndicationsThe Pioneer Plus catheter is intended to facilitate placement and positioning of catheters within the peripheral vasculature. The Pioneer Plus catheter also provides an intraluminal cross-sectional ultrasound image of the area of interest to facilitate placement of guidewires beyond stenotic lesions (e.g., sub-total, total, or chronic total occlusions) prior to additional intervention (i.e., PTA, stent, etc.).WarningThe Pioneer Plus catheter is not indicated for use in the coronary or cerebral vasculature.Adverse eventsPossible adverse events associated withuse of the Pioneer Plus catheter include,but are not limited, to the following:• Hemorrhage or hematoma• Injury to the vessel wall(e.g., perforation, dissection)• Infection• Peripheral embolization• Thrombosis of the vessel• Vessel spasmCautionFederal (USA) law restricts this device to sale by or on the order of a physician. For further information, please call Philips Volcano at800-228-4728 or consult Philips Volcano’s website at .Philips Volcano3721 Valley Centre Drive, Suite 500San Diego, CA 92130 USA© 2016 Koninklijke Philips N.V. All rights reserved. Trademarks are the property of Koninklijke Philips N.V. or their respective owners.600-0501.05/LB。
1.8寸LCD模块用户手册说明书
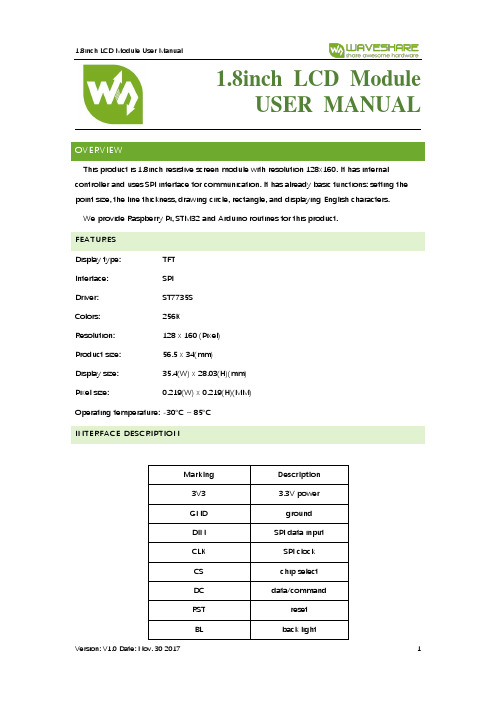
1.8inch LCD ModuleUSER MANUALOVERVIEWThis product is 1.8inch resistive screen module with resolution 128x160. It has internal controller and uses SPI interface for communication. It has already basic functions: setting the point size, the line thickness, drawing circle, rectangle, and displaying English characters.We provide Raspberry Pi, STM32 and Arduino routines for this product.FEATURESDisplay type: TFTInterface: SPIDriver: ST7735SColors: 256KResolution: 128 x 160 (Pixel)Product size: 56.5 x 34(mm)Display size: 35.4(W) x 28.03(H)(mm)Pixel size: 0.219(W) x 0.219(H)(MM)Operating temperature: -30°C ~ 85°CINTERFACE DESCRIPTIONMarking Description3V3 3.3V powerGND groundDIN SPI data inputCLK SPI clockCS chip selectDC data/commandRST resetBL back lightPROGRAM ANALYSIS1.Working principles:ST7735S is 132 x 162 pixels LCD panel, but the product is 128 x 160 pixels LCD display.In the display there are two processes: the horizontal direction scanning – from the 2nd pixel, the vertical direction scanning – from the 1st pixel. So, you can see that positions of pixels in RAM correspond to their actual positions while displaying.The LCD supports 12-bit, 16-bit and 18-bit per pixel input formats. They correspond to RGB444, RGB565 and RGB666 color formats. This routine uses the RGB565 color format, which is commonly used.LCD uses 4-wired SPI communication interface, which can save a lot of GPIO ports and provides fast data transfer to LCD as well.munication protocolNote: there is a difference from traditional SPI. Here we only need display, so sine wires come from slave to host are hidden. The detailed information please refer to datasheet at page 58RESX: Reset. Pull-down while powering on the module. Generally set as 1IM2: data communication mode pin, which define usage of SPICSX: chip selection control pin. If CS=0 – the chip is selectedD/CX: data/command control pin, if DC=0 – command is written, otherwise – data are writtenSDA: transmitted RGB dataSCL: SPI clockThe SPI communication protocol of the data transmission uses control bits: clock phase (CPHA) and clock polarity (CPOL):The value of CPOL determines the level when the serial synchronous clock is in idle state. CPOL=0, that its idle level is 0.The value of CPHA determines the timing of the data bits relative to the clock pulses. CPHA=0, data is sampled at the first clock pulse edge.The combination of these two parameters provides 4 modes of SPI data transmission. The commonly used is SPI0 mode, it is that GPOL=0 and CPHA=0.From the figure above, SCLK begins to transfer data at the first falling edge. 8 bits data are transferred at one clock period. Use SPI0 mode, High bits transfer first, and LOW bits following. DEMO CODERaspberry Pi, STM32 and Arduino programs are provided, wherein Raspberry Pi provides BCM2835, WiringPi and python programs. It implements common graphical functions as drawing dot, line, rectangle, circle, setting their sizes and line with; filling arias, and displaying English characters of 5 common fonts and other display’s functions.Following instructions are offered for you convenienceRASPBERRY1.Hardware connection1.8inch LCD module Raspberry Pi3.3V 3.3VGND GNDDIN MOSI (PIN 19)CLK SCLK (PIN23)CS CE0 (PIN 8)DC GPIO.6 (PIN 22)RST GPIO.2 (PIN13)BL GPIO.5 (PIN18)2.Enable SPI function of the Raspberry Pisudo raspi-configSelect: Advanced Options -> SPI -> yesActivate SPI hardware driver.3.Installation of librariesFore detailed information about libraries installation, please refer to this page:https:///wiki/Libraries_Installation_for_RPiIt is description of WiringPi, bcm2835 and python libraries installation.ageBCM2835 and WiringPi program should be only copied into directory of Raspberry Pi ()by samba or directly copy to the SD card). The following code are compied directly to the user directory of Pi.4.1Usage of BCM2835Run ls command as you can see below:bin: contains “.o” files.We don’t need to change it generallyFonts: contains 5 commonly used fontsPic: contains pictures used for displaying. The resolution of pictures must be 128x128,otherwise they cannot be displayed properly. And the format of pictures must be BMP.Obj: contains object files, like main.c, LCD_Driver.c, DEV_Config.c, LCD_GUI.c and theirheader files.main.c: The mian function. What need to note is that even though there are LCD_ScanDir used to control the direction of scanning, you need not to change it. Because this module is designed for Raspberry Pi, and for compatibility, we don’t recommend you to change it.DEV_Config.c:Definations of Raspberry Pi’s pins and the communication mode.LCD_Driver.c: Drive code of LCD. Need not change generally.LCD_BMP.c: Reading and analyzing BMP files and display themMakefile: This file contains compilation rules. If there are some changes in code, please run make clean to clean all the dependency file and executable files. Then execute make to compile the whole project and generate new executable files.tftlcd_1in8: executable file, generated by command makeTo run the program, you just need to run this command on terminal: sudo ./tftlcd_1in8 4.2WiringPiInput ls command, now you can see following:T he folders is similar to BCM2835’s. The only differences are that:1.WiringPi oprates by read/write the device files of Linux OS. and the bcm2835 is libraryfunction of Raspberry Pi’s CPU, it operates registers directly. Thus, if you have usedbcm2835 libraries firstly, the usage of WiringPi code will be failed. In this case, you just need to reboot the system and try again.2.Due to the first difference, they underlying configuration are different. In DEV_Config.c,use wiringpiPi and the corresponding wiringPiSPI to provide underlay interfaces.The program executed by command sudo ./tftlcd_1in8 as well4.3PythonInput ls command, you can see that:LCD_1in8.py: Driver code of LCDLCD_Config.py: configuration of hardware underlaying interface.Executing program: sudo python LCD_1in8.pyNote: Some of the OS don’t have image libraries. In this case, you can run: sudo apt-get install python-imaging to install the image library.Image is an image processing library of python, represents any image by an image object.Thus, we can create a blank image by new, its size must be same as the display size of LCD.Then draw picture by Draw library, finally, transfer the image to the LCD. Here usingImage.load() too read RGB888 data of pixel, and convert to RGB565. Scanning every pixel then we could get the whole image for displaying. Its most important code is as below:5.Auto-runInitialize autorun in Raspberry Pi by configuring code of /etc/rc.local file:sudo vim /etc/rc.localBefore exit0 add:sudo python /home/pi/python/demo.py &Important: to place the program /home/pi/python/demo.py at the same director, you can input command pwd to get the path. And & character is necessary at the end of command line, otherwise probable need to reinstall the system (impossible terminate the process by pressing ctrl+c, impossible to login with pi user permission).STM32This demo uses XNUCLEO-F103RB developing board and is based on HAT library.1.Hardware connection1.8inch LCD XNUCLEO-F103RBVCC 3V3GND GNDDIN PA7CLK PA5CS PB6DC PA8RST PA9BL PC72.Expected resultProgram the demo into the development Board. Firstly the screen is refreshed completely, then a solid line, dashed line, open circle, solid circle, rectangle, solid torque are drawn and English characters are shown.ARDUINOUNO PLUS Arduino development board is used here.1.Hardware connection1.8inch LCD Arduino3.3V 3V3GND GNDDIN D11CLK D13CS D10DC D7RST D8BL D92.Due to small global memory 2Kb of UNO PLUS, the display can’t work in graphical mode,but the calling method is the same. Just because there is no enough memory, this demo is not provided.COMPATIBLE CODE PORTINGOffered demo is the commonly used programs, which are able to be ported. They can be used with two screens and the difference is only in initialization of them and their sizes.The usage method is defined by macros. In LCD_Driver.h or in LCD.h:#define LCD_1IN44#define LCD_1in8.As the name of the macros, they are used for 1.44inch and 1.8inch LCD separately. To use for one LCD, just need to comment other one.For example://#define LCD_1IN44#define LCD_1IN8Here we use it for 1.8inch LCD, so we comment the 1.44 macro. After saving, Run make clean to remove dependency files, and then run make to generate new executable files.。
Spectra Precision SP80 GNSS接收器产品介绍说明书
The Most Connected GNSS Receiver SP80 GNSS ReceiverSP80GNSS ReceiverThe Spectra Precision SP80 is a next generation GNSS receiver that combines decades of GNSS RTK technology with revolutionary new GNSS processing. Featuring the new 240-channel “6G”chipset combined with the patented Z-Blade technology, the SP80 system is optimized for tracking and processing signals from all GNSS constellations in challenging environments.As the most connected GNSS receiver in the industry, the SP80 offers a unique combination of integrated 3.5G cellular, Wi-Fi and UHF communications with SMS, email and anti-theft technology.These powerful capabilities, packaged in an ultra-rugged housing andpatented antenna design with unlimited operation time (hot-swappablebatteries), make SP80 an extremely versatile turnkey solution.Key Features■■Patented Z-Blade technology ■■240-channel 6G ASIC ■■Hot-swappable batteries ■■Internal TRx UHF radio ■■ 3.5G cellular modem ■■Built-in WiFi communication ■■SMS and e-mail alerts ■■Anti-theft technology ■■Backup RTK ■■RTK Bridge ■■eLevel technology■■Trimble RTX correction servicesS P 80Patented inside-the-rod mounted UHF antenna designUnique 6G GNSS-centric TechnologyPatented Z-Blade processing technology running on a nextgeneration Spectra Precision 240-channel 6G ASIC fully utilizesall 6 GNSS systems: GPS, GLONASS, BeiDou, Galileo, QZSS andSBAS. Unlike GPS-centric technology which requires a minimumnumber of GPS satellites for GNSS processing, Z-Blades uniqueGNSS-centric capability optimally combines GNSS signals withoutdependency on any specific GNSS system; this allows SP80 tooperate in GPS-only, GLONASS-only or BeiDou-only mode ifneeded. In addition, SP80 supports the recently approved RTCM3.2 Multiple Signal Messages (MSM), a standardized definitionfor broadcasting all GNSS signals from space, regardless oftheir constellation. This protects the surveyor’s investment wellinto the future by providing superior performance and improvedproductivity as new signals become available.SMS and Email MessagingSP80 has a unique combination of communication technologiesincluding an integrated 3.5G GSM/UMTS modem, Bluetooth and Wi-Fi connectivity, and optional internal UHF transmit radio. The cellularmodem may be used for SMS (text message) and e-mail alerts as wellas regular Internet or VRS connectivity. SMS (text messages) can beused to monitor and configure the receiver. Likewise, SP80 can use allavailable RTK correction sources and connect to the Internet from thefield using WiFi hotspots, where available. The internal UHF transmit/receive radio allows for quick and easy setup as a local base station.This saves time and increases the surveyor’s efficiency.Anti-Theft ProtectionA unique anti-theft technology secures SP80when installed as a field base station in remoteor public places and can detect if the product isdisturbed, moved or stolen. This technology allowsthe surveyor to lock the device to a specific locationand make it unusable if the device is moved elsewhere. In this case,SP80 will generate an audio alert and show an alert message on itsdisplay. Furthermore, a SMS or e-mail will be sent to the surveyor’smobile phone or computer and provides the receiver’s currentcoordinates allowing tracking of its position and facilitating recoveryof the receiver. SP80’s anti-theft technology provides surveyors withremote security and peace of mind.The Most Powerful Tool forReliable Field UseThe SP80’s rugged housing, created by Spectra Precision’sengineering design lab in Germany, incorporates a host of practicalinnovations. Dual hot-swappable batteries can be easily exchangedin the field as a one hand operation for an interruption-free workingday, ensuring surveyors remain productive until the job is done. Theimpact-resistant glass-fiber reinforced casing, designed to withstand2m pole drops and waterproof to IP67, ensures that SP80 canhandle the toughest outdoor conditions. The patented UHF antenna,set inside the rugged carbon fiber rod, extends the range of RTKradio performance at the same time as armoring protection. Thesunlight-readable display offers instant access to key information likethe number of satellites, RTK status, battery charge and availablememory. With eLevel technology, the user is able to focus in oneplace when leveling and measuring as well as automatically storemeasurements when the receiver is level. These powerful designfeatures combine to make SP80 the most capable, most reliableGNSS receiver, backed by a comprehensive standard 2 year warranty.The Spectra PrecisionExperienceWith the most advanced and rugged field datacollectors from Spectra Precision, surveyors getmaximum productivity and reliability every day.Spectra Precision Survey Pro or FAST Surveysoftware is specifically tailored for the SP80GNSS receiver providing easy-to-use, yetpowerful GNSS workflows, letting the surveyorconcentrate on getting the job done. SpectraPrecision Survey Office Software provides a complete office suitefor post-processing GNSS data and adjusting survey data, as wellas exporting the processed results directly back to the field or toengineering design software packages. Combined with SpectraPrecision field and office software, SP80 is a very powerful andcomplete solution.SP80 Technical SpecificationsGNSS Characteristics■■240 GNSS channels- GPS L1C/A, L1P(Y), L2C, L2P(Y), L5- GLONASS L1C/A, L1P, L2C/A, L2P, L3- Beidou (Phase II) B1, B2- Galileo E1, E5a, E5b- QZSS L1C/A, L1-SAIF, L1C, L2C, L5- SBAS L1C/A, L5 (WAAS, EGNOS, MSAS,GAGAN, SDCM)- IRNSS L5■■Support for Trimble RTX™ real-timecorrection services■■Patented Z-Blade technology for optimalGNSS performance- Full utilization of signals from all 6 GNSSsystems (GPS, GLONASS, BeiDou, Galileo,QZSS and SBAS)- Enhanced GNSS-centric algorithm:fully-independent GNSS signal trackingand optimal data processing, includingGPS-only, GLONASS-only or BeiDou-onlysolution (Autonomous to full RTK)- Fast Search engine for quick acquisitionand re-acquisition of GNSS signals■■Patented SBAS ranging for using SBAS code& carrier observations and orbits in RTKprocessing■■Patented Strobe™ Correlator for reducedGNSS multi-path■■Up to 20 Hz real-time raw data (code &carrier and position output)■■Supported data formats: ATOM, CMR, CMR+,RTCM 2.1, 2.2, 2.3, 3.0, 3.1 and 3.2 (includingMSM), CMRx and sCMRx (rover only)■■NMEA 0183 messages outputReal-Time Accuracy (RMS) (1)(2)SBAS (WAAS/EGNOS/MSAS/GAGAN)■■Horizontal: < 50 cm■■Vertical: < 85 cmReal-Time DGPS position■■Horizontal: 25 cm + 1 ppm■■Vertical: 50 cm + 1 ppmReal-Time Kinematic Position (RTK)■■Horizontal: 8 mm + 1 ppm■■Vertical: 15 mm + 1 ppmNetwork RTK (6)■■Horizontal: 8 mm + 0.5 ppm■■Vertical: 15 mm + 0.5 ppmReal-Time Performance■■Instant-RTK® Initialization- Typically 2 sec for baselines < 20 km- Up to 99.9% reliability■■RTK initialization range: over 40 kmPost-Processing Accuracy (RMS) (1)(2)Static & Fast Static■■Horizontal: 3 mm + 0.5 ppm■■Vertical: 5 mm + 0.5 ppmHigh-Precision Static (3)■■Horizontal: 3 mm + 0.1 ppm■■Vertical: 3.5 mm + 0.4 ppmData Logging CharacteristicsRecording Interval■■0.05 - 999 secondsPhysical CharacteristicsSize■■22.2 x 19.4 x 7.5 cm (8.7 x 7.6 x 3.0 in)Weight■■ 1.17 kg (2.57 lb)User Interface■■Graphical PMOLED display■■WEB UI (accessible via WiFi) foreasy configuration, operation, status,and data transferI/O Interface■■RS232 serial link■■USB 2.0/UART■■Bluetooth 2.1 + EDR■■WiFi (802.11 b/g/n)■■ 3.5G quad-band GSM (850/900/1800/1900MHz) / penta-band UMTS module(800/850/900/1900/2100 MHz)Memory■■ 2 GB internal memory NAND Flash(1.5 GB user data)■■Over a year of 15 sec. raw GNSS datafrom 14 satellites■■SD/SDHC internal memory card (up to 32GB)Operation■■RTK rover & base■■RTK network rover: VRS, FKP, MAC■■NTRIP, Direct IP■■CSD mode■■Post-processing■■RTK bridge■■UHF repeater■■UHF networking■■Trimble RTX (cellular/IP)Environmental Characteristics■■Operating temperature: -40° to +65°C(-40° to +149°F) (4)■■Storage temperature: -40° to +85°C(-40° to +185°F) (5)■■Humidity: 100% condensing■■IP67 waterproof, sealed against sand and dust■■Drop: 2m pole drop on concrete■■Shock: ETS300 019■■Vibration : MIL-STD-810FPower Characteristics■■ 2 Li-Ion hot-swappable batteries, 38.5 Wh(2 x 7.4 V, 2600 mAh)■■Battery life time (two batteries): 10 hrs(GNSS On, and GSM or UHF Rx On)■■External DC power: 9-28 VStandard System Components■■SP80 receiver■■ 2 Li-Ion batteries■■Dual battery charger, power supply andinternational power cord kit■■Tape measure (3.6 m / 12 ft)■■7 cm pole extension■■USB to mini-USB cable■■Hard case■■ 2 year warrantyOptional System Components■■SP80 UHF Kit (410-470 MHz 2W TRx)■■SP80 Field Power Kit■■SP80 Office Power Kit■■Data collectors- Ranger 3- T41- MobileMapper 50- Nomad 1050■■Field software- Survey Pro- FAST Survey- Survey Mobile (Android)- SPace control app for 3rd partydevices (Android)(1) A ccuracy and TTFF specifications may be affected byatmospheric conditions, signal multipath, satellite geometry andcorrections availability and quality.(2) P erformance values assume minimum of five satellites, followingthe procedures recommended in the product manual. High multi-path areas, high PDOP values and periods of severe atmosphericconditions may degrade performance.(3) L ong baselines, long occupations, precise ephemeris used(4) A t very low temperatures UHF module should not be used in thetransmitter mode.(5) Without batteries. Batteries can be stored up to +70°C.(6) Network RTK PPM values are referenced to the closest physicalbase station.(7) Receiver initialization time varies based on GNSS constellationhealth, level of multipath, and proximity to obstructions such aslarge trees and buildings.Trimble RTX Initialization (1)(2)(7)。
Intellian i3 i4 i4P 产品说明书

CONTENTSINTRODUCTION (1)I NTRODUCTION TO I NTELLIAN I3/I4/I4P (1)F EATURES OF I NTELLIAN I3/I4/I4P (2)B ASIC S YSTEM C ONFIGURATION OF I NTELLIAN I3/I4/I4P (3)INSTALLATION (4)S YSTEM C OMPONENTS (4)T OOLS R EQUIRED FOR I NSTALLATION (7)P LANNING THE INSTALLATION (8)S ELECTION OF I NSTALLATION S ITE (8)I NSTALLATION AND M OUNTING OF ANTENNA (10)I NSTALLING THE ACU (15)C ONNECTING THE S YSTEM C ABLES (17)C ONNECTING THE SYSTEM TO A GPS (20)T ARGET S ATELLITE S ETTING (21)A DJUSTING THE LNB S KEW A NGLE (L INEAR POLARIZATION ONLY) (22)OPERATION INSTRUCTION (24)I NTRODUCTION (24)OPERATION USING THE ACU (25)ACU S OFT K EYS (25)N ORMAL M ODE (25)S ET U P M ODE (30)OPERATION USING PC CONTROLLER PROGRAM (52)I NTRODUCTION (52)P ROGRAM I NITIALING AND S ERIAL P ORT S ETUP (53)M AIN M ENU –U SING D EFAULT D UAL-SAT M ODE (54)S ET S ATELLITE I NFORMATION (55)M AIN M ENU-U SING A DV ANCED T RI-SAT M ODE (56)S ET S ATELLITE I NFORMATION (57)C ONTROLLER MENU (60)TROUBLESHOOTING (65)PREPARATION FOR TRANSPORTATION (67)WARRANTY (68)APPENDIX : TECHNICAL SPECIFICATION (69)I NTELLIAN I4/I4P (69)I NTELLIAN I3 (70)INTRODUCTIONIntroduction to Intellian i3/i4/i4PIntellian i3/i4/i4P is a digital satellite antenna system designed specificallyfor all types of vessels (Anchored or transit) to automatically identify, trackand capture satellite signals from the Digital Video Broadcasting (DVB: the international standard for digital TV transmissions) compatible satellites.Specifically, Intellian i3/i4/i4P has Wide Range Search (WRS) algorithm, which minimizes the search time during initialization, and Dynamic Beam Tilting (DBT) technology, which dynamically shapes the antenna beam to utilize stabilization. Once the satellite is acquired, the antenna DBT continuously measures the heading, pitch, and roll of the vessel by obtaining the satellite signal level around the antenna point, and transmitscommands to the antenna motors to keep the antenna pointed at the satellite at all times. This active stabilization is enhanced by a conical scan tracking function to detect and lock onto the strongest signal, resulting in the clearest reception possible. The i3/i4/i4P has a built-in GPS system which enhances the speed of satellite signals acquisitions.In addition, the i4P provides the embedded auto skew angle control system to maintain the optimal signal strength and increase the quality of satellite receptions in weak satellite single coverage area.Features of Intellian i3/i4/i4PEnjoy satellite broadcasts at seaIntellian i3/i4/i4P is the most modern antenna system that enables you to receive a high quality broadcasting signal at sea, where the atmospheric and environmental condition are very harsh.Fully automatic control systemFully automatic control system allows you to simply turn the power switch on, and have crystal clear, high quality satellite television in motion or at anchor.High quality antennaHigh tech parabolic antenna technology has been adopted for this antenna system, which is optimal for marine conditions. This enables you to receive the optimal signal level even when it is raining or snowing. Fast and efficient search for the satelliteThe WRS (Wide Range Search) algorithm allows for the antenna system to search the satellite within the shortest amount of time and to detect the satellite signal under any position and with any directional movement of the ship.Easy installation and outstanding reliabilityIntellian i3/i4/i4P uses only one RF cable for installation. This makes installation easy. Power, RF and Data signals transfer from the antenna the ACU through this single cable. In addition, Intellian i3/i4/i4P provides highly reliable system through the implementation of a modularized design, and the usage of strictly proven components.Built-in GPSIntellian i3/i4/i4P has imbedded GPS, which allows for the system to upload the GPS data automatically into the system for an even faster and stable system.Built-in automatic skew angle control systemThe automatic skew control system allows Intellian i4P to maintain the optimal skew angle at all times and ensure maximum level of satellite signal level.NMEA GPSPC( Not Supplied)Satellite Receiver (Not Supplied)DC Power on Vessel Satellite Receiver (Not Supplied)Front Rear Hexagonal Bolt5EASpring Washer5EAFlat Washer5EATapping Screw(Φ4x16L)Machine Screw(Φ3x8L)Power Drill Cross-HeadΦ10mm Drill Φ80mm Pencil5mmAntenna Unit15°Obstacleobstacles within 15 degreesabove the antenna. Anyantenna from tracking thesatellite signal (Refer to theWARNINGØ10mm Drillø80mmHole sawRF Cable OptionalAntenna Unit 11mmSpannerWARNING Antenna Unit Support DeckM8 Flat WasherM8 Hex. Bolt13mm SpannerM8 Spring Washer5.38cm (2.1”)IRD 1 (Not Supplied)DC Power Cable NMEA GPSDC Power Cable NMEA GPSDC Power NMEA GPS IRD1IRD 2IRD 3IRD 4Multi switch (Not supplied)Ground (-)NMEA out (+)4-M4X6 Socket Set ScrewTRACKINGTRACKING B:TRACKING B:TRACKING C:DTV101###.# EL###.##E ##.##N1. Press BACK to enter sleep mode.2. Press Back again for exiting sleep mode.SET SAT PAIR ?SET TRIPLE SAT ? SAT A : DTV101 PREVSAT B : DTV119SAT C: DTV110#SAVE ?YES NOVER LOW NID 0x0003HOR LOW 12523 21096 x2HOR LOW NID 0x0003VER HIGH 12598 21096INPUT +VER HIGH NID 0x0003HOR HIGH 12523 21096SAVE ?VERIFY : DVB DECODE VOLTAGE: DISEQC: ONLY 22KHZ PARAM: SCAN OFFx3SET ANT PARAMETER?WRS LEVEL : 0500SATNAME : DTV101SAVE ? 5. Input thex4SAVE ?x4SET LOCAL FREQ? LNB TYPE : UNIVERSALNEXTSET SAT PAIR ?PREVLONGITUDE ###.## Ex1YES NEXTLONGITUDE ###.## EINPUT +SAVE ?4. Input the longitude data.SET SAT PAIR ?SAVE ?x5DO NOT USE DISEQCNEXT 4. Select the DiSEqC MethodSET SAT PAIR ?x6SF-301SSET SAT PAIR ?x7x9 ACU POWER : 27.1 Vx10SET SAT PAIR ?x8 SET REMOCON ? FUNC : CHANGE SATPRESS A REMOTE KEY FUNC :x11x12 LOAD REGION INFO? CONTINENT: EUROPE REGION : ITALYLOAD? LOADING :SET SAT PAIR ?x13Command Button• Baud Rate Setting – To display communication speed.•Connection Status Display – To display communication port Antenna Status Monitoring•Search – Antenna is searching for the selected satellite.•Tracking – Antenna is tracking the selected satellite.•Initialize – Antenna or the ACU is initializing.◆ ♦⌧•Satellite InformationThe name, longitude and confirmation method of the satellite isdisplayed when a satellite is selected in the list box. Push “EditSatellite Information” button to update the information onmodifying the value.•DiSEqCAntenna Status Monitoring•Search – Antenna is searching for the selected satellite.• Tracking – Antenna is tracking the selected satellite.• Initialize – Antenna or the ACU is initializing.◆ ♦•Satellite InformationThe name, longitude and confirmation method of the satellite is displayed when a satellite is selected in the list box. Push “Edit Satellite Information” button to update the information on modifying the value.•DiSEqCWhen the operation method of DiSEqC is selected to “Change3) Click “confirm / yes” button to complete the update.Command Buttons• Load GPS Files – Reads in the various city information from theGPS files.Command Button• Edit Satellite Information – Tothe antenna•Satellite Information – Satellite information consists of frequency,Command Button• Edit Satellite Information – To change frequency information ofthe antenna.• Angle of AntennaTwo kinds of antenna movement is available. One is to move to the target position and the other is to move by certain amount of angle. The current position (angle) of the antenna is displayed as “Current” and to move to the target position, push “Go to target Position” button after keying in desired angle into “Target”. To move to a certain amount of angle only, move antenna to directionbuttons after keying in the desired angle into the AZ and EL in the “Mover Command ButtonsSet Control Parameter–To register parameters values.Set Flags–To set flag setting for WRS Method or Offset Difference.Appendix 71Intellian Technologies, Inc.HQ Dongik Building 7th Flr.,98 Nonhyun-Dong, Gangnam-gu,Seoul 135-010, KoreaTel : +82-2-515-4923Fax: +82-2-545-4903Factory SK Ventium 104-501,522 Dangjeong-Dong, Gunpo-Si,Kyunggi-Do 435-776, KoreaPhone: +82-31-436-1488Fax: +82-31-436-1489R&D Center SK Ventium 104-601,522 Dangjeong-Dong, Gunpo-Si,Kyunggi-Do 435-776, KoreaPhone: +82-31-436-2280Fax: +82-31-436-2284Intellian Technologies USA, Inc.9261 Irvine Blvd.Irvine, CA 92618 USAPhone: +1-949-916-4411Fax: +1-949-271-4183E-Mail:*********************************Homepage : 。
西门子技术问题总汇

文档标题
如何设置模拟量输入模板 SM 431-7KF00的温度补偿? 如何解决 SIMATIC BATCH 的 IL43基本设备上 hotfix 安装的问题? 如果通过 PCS7 V6.1 SP1 DVD 单独安装 SIMATIC BATCH Report 需要注意哪些设置? 为什么冗余模拟量输出模块的每个通道只有一半电流输出? 使用WinCC/Web Navigator V6.1 SP1需要什么样的操作系统和软件? 是否 COM PROFIBUS 可以使用所有版本的 GSD 文件? 如何在 WinCC flexible 中组态与S7 控制器的 Profinet 连接? 如何在操作面板上设定定时器时间, 同时如何输出定时器的剩余时间? 数据块初始值与实际值的含义 如何通过窗口对象滚动条步进调节过程值参数? 使用 SINAUT ST7 向电子邮箱接受方发送文本信息 SMS 需要做何设置? 可以使用CPU317-2PN/DP替代在iMap中组态的CPU315-2PN/DP吗? 什么情况下插入C-PLUG卡或者C-PLUG有什么作用? 通过一台PC,可以使用哪种方式访问与IWLAN/PB link PNIO或IE/PB link PNIO连接的PROFIBUS设备? 当在SINAUT网络中使用4线变压器应该注意哪些设置? 在 SINAUT 网络中,使用MD3拨号调制解调器作为专线调制解调器时,要进行哪些设置? 如何安装 DCF77 天线, 当选择 DCF77 天线时需要注意什么? 使用SINAUT ST7向传真机发送文本信息时,需要进行哪些设置? 在 SINAUT 项目中发送短消息必须进行哪些特殊服务的设置? 如何在S7-300 PN CPU和CP343-1之间建立一个open TCP 通讯连接,以及如何进行数据交换? 如何在两个S7-300 PN CPU之间建立一个open TCP 通讯连接,以及如何进行数据交换? 哪些控制系统可以成功与SINAUT ST7一起使用? 使用“零-Modem”电缆连接 TIM 模块应该注意什么? 当用 SINAUT 诊断工具的ST1协议进行诊断时,为什么TIM的状态不能显示? TIM 3V-IE 和 TIM 3V-IE Advanced 模块在以太网上通信时使用哪个端口号? 如何对没有接入网络的S7-200CPU编程? 掉电后,LOGO!的程序会丢失吗? 从 PCS7 V6.1 起,为什么没有分配任何 hierarchy (PH) 的 测量点(变量)通过编译不能在OS中自动创建相应的变量? 在SFC中,如何实现从一个 Sequencer 跳出后回到另一个 Sequencer 的某个固定位置并继续执行? 如何实现过程变量的平均值归档? 存储文件的目标路径和备份可选路径有何作用? WinCC变量归档中如何实现采集周期小于500ms的变量归档? 为什么在 OS 上会显示如下信息“时间跳变通知-永久切换为从站模式”? 在西门子A&D产品支持网站是否可以下载关于ET200M的手册? 在S7-400上怎样安装冗余电源? UDT改变后怎样更新使用UDT产生的数据块。 为什么在FB块中使用OUT变量赋值被调用FB块的IN变量时出现错误信息34:4469? 如何查看4-mation导入-导出错误 不能正确引导8212-1QU IBM/Lenovo M52 ThinkCentre 实时趋势更新缓慢的原因 如何保存变量名字典CSV文件的格式
若要为受影响的设备重新启用典型DMA或更快DMA的传送模式

在 Windows 2000 启用内存直接存取 DMA,方法:
作为管理员(或具管理员特权的用户)登录进入Windows。右击Windows桌面上的“我的电脑”图标并从弹出菜单选择“属性”。系统属性窗口出现。单击“硬件”标签, 然后单击“设备管理器”。设备管理器窗口出现。双击“IDE ATA/ATAPI控制器”来查看控制器列表。双击“主IDE通道”。主IDE信道属性窗口出现。 单击“高级设置”标签,选择装置0及装置1的“DMA”,单击确认。对“从IDE通道”进行同样设置。Windows问您是否要重新启动,单击“是”。
若要为受影响的设备重新启用典型DMA或更快DMA的传送模式,请执行以下操作:
1.双击“管理工具”,然后双击“计算机管理”;
2.单击“系统工具”,然后单击“设备管理器”;
3.展开“IDE ATA/ATAPI控制器”节点;
4.双击您要为其恢复典型DMA传送模式的控制器;
1.单击“开始”,单击“运行”,键入Regedit,然后单击“确定”。
2.在注册表中找到并单击以下项:
HKEY_LOCAL_MACHINE\SYSTEM\CurrentControlSet\Control\Class\0001和HKEY_LOCAL_MACHINESYSTEMCurrentControlSetControlClass\0002
这一新的策略实现后将大大降低系统降低或关闭DMA传送模式的机会。现在我们可以安心地使用挂起系统和高性能的DMA硬盘模式,再也不会发生系统性能突然下降的情况了。
/2006/07/dma.html
什么是DMA?如何打开DMA?如何防DMA被系统关闭?
/question/7781148.html
snmp变量类型对应的代码
snmp变量类型对应的代码类型变量:SNMP_SYNTAX_INT:2SNMP_SYNTAX_UINT32 :71SNMP_SYNTAX_CNTR32:65SNMP_SYNTAX_GAUGE32:66SNMP_SYNTAX_TIMETICKS:67SNMP_SYNTAX_CNTR64:70SNMP_SYNTAX_OCTETS:4SNMP_SYNTAX_OPAQUE:68SNMP_SYNTAX_NSAPADDR:69SNMP_SYNTAX_IPADDR:64SNMP_SYNTAX_OID:6SNMP_SYNTAX_NULL:5SNMP_SYNTAX_NOSUCHOBJECT:128SNMP_SYNTAX_NOSUCHINSTANCE:129SNMP_SYNTAX_ENDOFMIBVIEW:130无法写码(PT212、PS106、J728、UT700U、26A)(就是系统能选择到机型但无法进行写码)新系统里有部份机型没有(V210、PT788)。
(在系统中都没办法选择到该机型)tf168,367fzlinchunz@/doc/a25859854.html,修改远程桌面的端口号localmechine/system/currentcontorlset/control/termialserv er/winstations/rdp-tcpportnumber键,改为其他端口号连接:ip+端口号//trapType#define SNMP_GENERICTRAP_COLDSTART 0#define SNMP_GENERICTRAP_WARMSTART 1#define SNMP_GENERICTRAP_LINKDOWN 2#define SNMP_GENERICTRAP_LINKUP 3#define SNMP_GENERICTRAP_AUTHFAILURE 4#define SNMP_GENERICTRAP_EGPNEIGHLOSS 5#define SNMP_GENERICTRAP_ENTERSPECIFIC 6Snmp错误代码#define SNMPAPI_ALLOC_ERROR 2 // Error allocating memory#define SNMPAPI_CONTEXT_INVALID 3 // Invalid context parameter#define SNMPAPI_CONTEXT_UNKNOWN 4 // Unknown context parameter#define SNMPAPI_ENTITY_INVALID 5 // Invalid entity parameter#define SNMPAPI_ENTITY_UNKNOWN 6 // Unknown entity parameter#define SNMPAPI_INDEX_INVALID 7 // Invalid VBL index parameter#define SNMPAPI_NOOP 8 // No operation performed#define SNMPAPI_OID_INVALID 9 // Invalid OID parameter #define SNMPAPI_OPERATION_INVALID 10 // Invalid/unsupported operation#define SNMPAPI_OUTPUT_TRUNCATED 11 // Insufficientoutput buf len#define SNMPAPI_PDU_INVALID 12 // Invalid PDU parameter #define SNMPAPI_SESSION_INVALID 13 // Invalid session parameter#define SNMPAPI_SYNTAX_INVALID 14 // Invalid syntax in smiVALUE#define SNMPAPI_VBL_INVALID 15 // Invalid VBL parameter #define SNMPAPI_MODE_INVALID 16 // Invalid mode parameter#define SNMPAPI_SIZE_INVALID 17 // Invalid size/length parameter#define SNMPAPI_NOT_INITIALIZED 18 // SnmpStartup failed/not called#define SNMPAPI_MESSAGE_INVALID 19 // Invalid SNMP message format#define SNMPAPI_HWND_INVALID 20 // Invalid Window handle#define SNMPAPI_OTHER_ERROR 99 // For internal/undefined errors#define SNMPAPI_TL_NOT_INITIALIZED 100 // TL not initialized#define SNMPAPI_TL_NOT_SUPPORTED 101 // TL does not support protocol#define SNMPAPI_TL_NOT_AVAILABLE 102 // Network subsystem has failed#define SNMPAPI_TL_RESOURCE_ERROR 103 // TL resource error#define SNMPAPI_TL_UNDELIVERABLE 104 // Destination unreachable#define SNMPAPI_TL_SRC_INVALID 105 // Source endpoint invalid#define SNMPAPI_TL_INVALID_PARAM 106 // Input parameter invalid#define SNMPAPI_TL_IN_USE 107 // Source endpoint in use #define SNMPAPI_TL_TIMEOUT 108 // No response before timeout#define SNMPAPI_TL_PDU_TOO_BIG 109 // PDU too big for send/receive#define SNMPAPI_TL_OTHER 199 // Undefined TL errorifInOctets ,ifOutOctets 流量节点。
Epson 扫描器产品信息指南说明书
EPSONP R O D U C T I N F O R M A T I O N G U I D EUPDATE FOR BUSINESS SYSTEM PRODUCTS7/09This package provides a scanner product section to be added to the Epson Business System Product Information Guide. The table of contents of this section is listed below.Epson CaptureOne Single FeedAccessories . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 Connections . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 Computer requirements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 Scanning specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 Paper specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 MICR specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1 Electronic endorsement . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 Reliability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 Electrical Characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 Safety . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 Environmental Conditions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 DIP Switches . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 Lights and Switches . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 LEDs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 Switches . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 Inserting a Check . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2 Ejecting Checks . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 Installing the Franking Cartridge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 Single Pass Check Flow . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 Cleaning the Scanner Glass . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 Cleaning the MICR Unit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 Clearing a Paper Jam . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 Transporting the Scanner . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 Self-test . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 Scanner Dimensions and Weight . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 Error and Information Codes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 Status messages . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 Recoverable errors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 Unrecoverable errors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 Sensors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 Related Documentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57/09Epson CaptureOne Single Feed7/09Epson CaptureOne Single Feed - 1AccessoriesConnectionsSpecificationsComputer requirementsCPU Pentium 4 1.2 GHz or aboveMemory ≥ 256MB above minimum OS system requirementsHDD space ≥ 30MB free space with driver installed InterfaceUSB 2.0 high-speedWindows version 2000 Professional SP4XP Home Edition/ Professional SP2/SP3Vista (32-bit, 64-bit) Home Basic/ Home Premium/ Ultimate/ BusinessVista (32-bit, 64-bit) Home Basic/ Home Premium/ Ultimate/ Business with SP1.NET framework 1.1, 2.0, 3.0, or 3.5Supported development languagesWin32Visual C ++ 6.0, Visual Basic Visual C ++ .NET 2003,Visual C ++ 2005, Visual C #.NET 2003, Visual C # 2005,Visual Basic .NET 2003, Visual Basic 2005Scanning specificationsSingle passScans both sides of check, reads MICR, and performs franking in same pass.Scanner type CIS (contact image scanner)Resolution (dpi)200 x 200, 120 x 120, 100 x 100Graduation Grayscale:256 levelsBlack & white: 2 valuesData formats Grayscale:TIFF, JPEG, BMP, RAWBlack & white:TIFF (CCITT Group 4),BMPImage size 4.04 (W) x 10.59" (L) (maximum){102.6 x 269 mm}Image quality Complies with IQA (Image QualityAssurance) by FSTC (Financial Services Technology Consortium)Scanning speed 19.69 "/s {500 mm/s}Font recognition OCR A and OCR BOCR recognition ≥ 98% at 77°F (ANSI, excluding O and 0)Paper specificationsTypeNormal, single-ply only Size (H x L)2.68 ~ 4.72" x 4.72 ~ 9.25"{68 ~ 120 mm x 120 ~ 235 mm}Thickness 0.003 ~ 0.008" {0.075 ~ 0.2 mm}Weight 16 ~ 32 lb {60 ~ 120 g/m 2}SF capacity Holds 1 sheetMain pocket capacity (both 1- and 2-pocket models)Holds up to 100 sheetsSub pocket capacity (2-pocket model only)Holds up to 50 sheetsInstallation Must be horizontal (within a tilt of ± 5°)MICR specificationsMagnetic character typesE13B, CMC7 (Alphabetic not supported)MICR recognition rate≥ 98% at 77°F (E13B: ANSI)Errors of ≤ 1% (E13B: ANSI)Franking cartridge EFC-01 franking cartridgeInk color: redExpiration:18 months from production(at room temperature)Ink life:18,000 prints** Using Epson’s standard print pattern.Contents of the Utility & Documents CD TM-S1000 Single Feed Driver TM-S1000 Single Feed UtilityTM-S1000 Single Feed Utility User’s Manual TM-S1000 Single Feed User’s ManualConnector Description USB 2.0High-speed transmission at 480 Mbps [bps: bits per second]PowerAC Adapter C, 24 V ± 10%, supplied with CaptureOneUSB connectorPower supply connectorHook to secure USB cableEpson CaptureOne Single Feed Single Feed2 - Epson CaptureOne Single Feed 7/09Electronic endorsementCan paste recorded image data on the back image of a check.ReliabilityFranking cartridge life18,000 in Epson standard print patternFranking cartridge expiration date18 months after productionScanner life span 1 million sheets MTBF 180,000 hours MCBF 2,470,000 cyclesElectrical CharacteristicsPower supply Epson AC Adapter C supplied with scanner Supply voltage 24 V ± 10%Current consumption Operation 1.0 A, approximate Standby 0.2 A, approximateSafetyEMIFCC/ICES-003 Class ASafety standardsUL60950-1/CSA C22.2 No. 60950-1(Tested using Epson AC Adapter C.)Environmental ConditionsTemperatureOperating 50 to 104°F {10 to 40°C}StoragePacked–4 to 140°F {–20 to 60°C}(≤ 120 hours at –4 or 140°F)Humidity (no condensation)Operating 20 to 80% RH Storage5 to 85% RHDIP SwitchesTwo fixed DIP switches are located on the main board inside the bottom cover of the CaptureOne SF.Lights and SwitchesLEDsPOWEROn when CaptureOne SF power is on.ERROROff when CaptureOne SF is online.On when scanner is offline (and when scanner cover or franker cover are open)Flashes during an error, during initialization, or while waiting for document removal. (See “Error LED Codes” below.)DOCUMENTOn when scanner is ready to process the document in the SF or during document processing.Flashes when the scanner is waiting for document insertion.SwitchesPOWERTurns the CaptureOne on or off. A power switch cover is provided to prevent accidental turn off. If installed and a failure occurs, unplug scanner immediately.Inserting a Check1.Fully extend the pocket guide. Extend the SF guide fully, ifneeded. See the illustration below.SW FunctionONOFF1Internal use. Do not change.—Fixed to OFF 2Internal use. Do not change.Fixed to ON—POWERERROR DOCUMENTEpson CaptureOne Single Feed7/09Epson CaptureOne Single Feed - 32.You can insert 1 check into the SF to be fed automatically.3.Insert the check straight facing the outside, as shown below.Ejecting Checks1.When the checks are ejected, remove them.CAUTION :Do not overfill pockets with checks. Otherwise, a paperjam may occur.2-pocket model = main pocket: 100; sub pocket: 50.1-pocket model = main pocket: 100.Installing the Franking CartridgeCAUTION :Keep the franking cartridge out of reach of children.Do not disassemble the franking cartridge.Handle carefully because ink stains e only genuine Epson cartridges.Do not remove cartridge from packing until ready to e cartridge before expiration date printed on the box.Dispose of cartridge according to applicable regulations.1.Open the franker cover by pulling the lever forward.2.Remove used franking cartridge, if installed, as shownbelow. by holding the knob at the top of the cartridge.3.Carefully insert the new franking cartridge from the top,and push it firmly but gently until it clicks into place.4.Close the franker cover until it clicks into place.Single Pass Check FlowThe CaptureOne can perform 4 actions on a document in a single pass: scanning the image of both the face and back, reading magnetic characters, and franking.1.Insert a document into the feeder section.2.The scanner scans the images of the face and back.3.The scanner reads the magnetic characters on thedocument.4.The franking section prints a pattern.5.The document is fed to the outlet.Sub pocketMain pocketTwo-pocket modelKnobEpson CaptureOne Single Feed Single Feed4 - Epson CaptureOne Single Feed 7/09Cleaning the Scanner GlassClean the scanner glass if it gets dirty from ink or paper dust, or at least once every 6 months or 100,000 passes.1.Open the scanner cover as shown below.2.Lightly wipe the glass areas shown in the picture below witha soft dry cloth.CAUTION :To prevent spots or stains, do not use syntheticdetergent, benzine, water, or other liquids to clean. Never apply any liquid directly to the scanner glass.3.If the scanner glass is smeared with grease, oil, ink, etc.,wipe the glass with a cloth lightly dipped in alcohol.4.Close the scanner cover firmly until it clicks into place.Cleaning the MICR UnitDirt or dust on the MICR unit can increase errors in reading magnetic characters. Clean the MICR unit every 6 months or 100,000 passes. Use the TM-S1000 Utility in the Utility & Documents CD or your application to clean the MICR e KICTeam Waffletechnology ® cleaning cards or an equivalent commercial cleaning sheet.Note:For cleaning steps, see the TM-S1000 Utility User’s Manual.Do not use sticky cleaning sheets. They may cause a jam or machine failure.Dispose of used cleaning sheets properly. Do not reuse.Clearing a Paper JamOpen the scanner cover or franker cover to remove the jammed paper. See the illustration below.Transporting the ScannerFollow the steps below to transport the scanner.1.Turn off the scanner.2.Confirm that thePOWER LED is off.3.Remove the power supply connector.4.Store the pocket guide and the SF guide inside the scanner.5.Pack the scanner upright.Self-testThe self-test checks the following scanner functions:❏Model name ❏Serial number❏Control firmware version ❏Presence of franking cartridgeThe self-test is performed with Epson TM-S1000 Utility. See TM-S1000 Utility User’s Manual for details.Scanner Dimensions and Weight6.93 x 13.98 x 6.30" (H x W x D) {176 x 355 x 160 mm}8.6 lb {3.9 kg}Scanner glassMICR unitScanner coverEpson CaptureOne Single Feed7/09Epson CaptureOne Single Feed - 5Error and Information CodesRecoverable errorsUnrecoverable errorsSensorsRelated DocumentationEpson TM-S1000 Single Feed Specification Epson TM-S1000 Single Feed Service Manual Epson TM-S1000 Single Feed Parts Price ListEpson TM-S1000 Single Feed Technical Reference Guide Epson Franking Cartridge EFC-01 SpecificationERROR LED (Orange)Cause and SolutionMechanism position errorThis occurs when the SF, franking, or pocket switch board sensor detect an error during initialization of the scanner.The scanner can recover from this error if an instruction is sent from the driver or if the scanner is turned off, the error is cleared, and the scanner is turned back on.Paper jam errorOne of 5 things has happened:1.Paper has been detected during initialization.2.The paper length, middle, franking, or ejection sensor detected a paper-feed error.3.The SF failed to feed the sheet.4.The check was too short or too long.5.The cover was open during check feeding.Remove the jammed sheet, be sure the cover is closed, and send an instruction from the driver or turn the scanner off and back on again.Document read errorFor this error to occur, the user must select that this error stop reading under any of the following circumstances:1.Double-feeding was detected.2.Incorrect check paper insertion wasdetected.3.The scanner detected externalnoise.After the cause of the error is fixed, the scanner can recover from the error if it receives an instruction from the driver, if the scanner is turned off and back on, or if the franker cover is opened and the check is removed.ERROR LED (Orange)Cause and Required Action CPU execution errorThe CPU is trying to execute an order to an invalid address.Turn off power as soon as possible.Read/write orMemory overwrite errorA read/write check did not end normally or an error occured during a memory overwrite.Turn off power as soon as possible.Approx. 320 ms320 ms intervals320 ms intervalsApprox. 320 msApprox. 5120 msERROR LED (Orange)Cause and Required Action High voltage errorPower supply voltage is too high.Turn off power as soon as possible.Low voltage error Power supply voltage is too low.Turn off power as soon as possible.Communication device errorAn error has occured with a communication device.Turn off power as soon as possible.Drive circuit errorAn image scanner error has occurred.Turn off power as soon as possible.(A) SF sensor(B) Paper length sensor (C) Middle sensor (D) Franking sensor (E) Eject sensor(F) Main pocket nearly full sensor (G) Sub pocket nearly full sensor (H) Scanner cover open sensor(I) Franker cover open sensor (J) Franking cartridge sensor(K) Franking cartridge position sensor (L) Pocket switching board sensor (M) Hopper position sensor (N) Image scanner unit(O) MICR unit (P) Franking unitPaper feed directionPaper feed direction。
ATM初始化交换机的几种方法
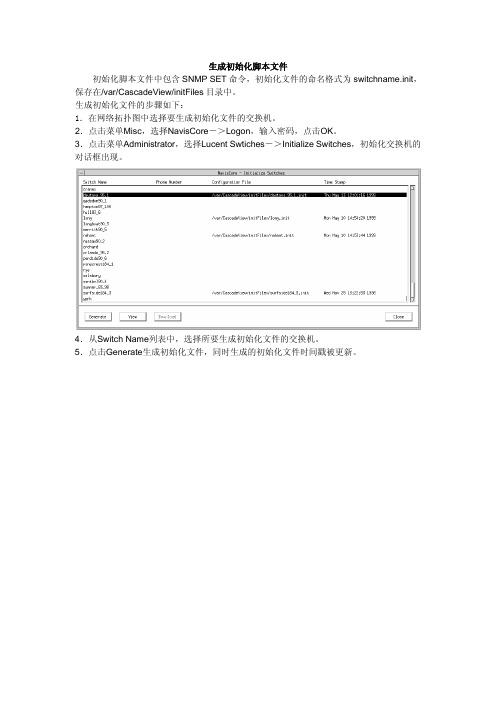
生成初始化脚本文件初始化脚本文件中包含SNMP SET命令,初始化文件的命名格式为switchname.init,保存在/var/CascadeView/initFiles目录中。
生成初始化文件的步骤如下:1.在网络拓扑图中选择要生成初始化文件的交换机。
2.点击菜单Misc,选择NavisCore->Logon,输入密码,点击OK。
3.点击菜单Administrator,选择Lucent Swtiches->Initialize Switches,初始化交换机的对话框出现。
4.从Switch Name列表中,选择所要生成初始化文件的交换机。
5.点击Generate生成初始化文件,同时生成的初始化文件时间戳被更新。
1.在网络拓扑图上,选择所要操作的交换机。
2.点击菜单Misc,选择NavisCore->Logon,输入密码,点击OK。
3.点击菜单Administrator,选择Lucent Parameters->Set Parameters,出现对话框。
4.选择PRAM按钮,PRAM同步对话框出现。
5.选择Generate PRAM并点击OK按钮,生成SNMP SET命令的配置文件。
6.生成的PRAM文件存放在/opt/CascadeView.var/cfgSyncFiles目录下,对于不同的交换机类型,其子目录对应如下表:7.子目录下的文件命名方式为:a.P<slot number>。
如果交换机的名字为Fuzhou,那么CP/SP/NP模块的PRAM文件的名字为Fuzhou.P01。
如果PRAM是从14槽道生成的,那么PRAM文件的名字为Fuzhou.P14。
使用Windows自带的超级终端或者是其他商业软件,必须设置好以下几点(以windows 自带的超级终端为例):a.传输协议-设置此项为文本模式传输(Transfer protocol - Set this to text mode transfer)。
水鸟系统GmbH ITSC1000控制器用户手册版本1.0说明书
Control UnitUser ManualVersion 1.0Table of Contents1. Control Unit ITSC1000 ................................................................................................................. - 1 - 1.1 Technical Data ..................................................................................................................... - 1 - 1.2 Interface Definition ............................................................................................................. - 2 - 1.3 Mounting and Dismounting on Slider ................................................................................. - 4 -Mounting Bracket ........................................................................................................................ - 4 - Mounting of Control Unit ............................................................................................................ - 4 - Dismounting of Control Unit ....................................................................................................... - 4 - 1.4 Handling and Safety Instructions ........................................................................................ - 5 - 1.5 Troubleshooting .................................................................................................................. - 6 -1.6 Regulatory Hints .................................................................................................................. - 7 -2. Mobile App .................................................................................................................................. - 9 - 2.1 Operating Systems............................................................................................................... - 9 -Android ........................................................................................................................................ - 9 - iOS................................................................................................................................................ - 9 - 2.2 Connecting to Control Unit.................................................................................................. - 9 - 2.3 System Initialization .......................................................................................................... - 10 -2-Point-Initialization .................................................................................................................. - 10 - 1-Point-Initialization .................................................................................................................. - 10 - 2.4 System Control .................................................................................................................. - 11 -Speed and Acceleration Control ................................................................................................ - 11 - Positioning ................................................................................................................................. - 11 - Emergency Stop ......................................................................................................................... - 11 - 2.5 Camera Settings ................................................................................................................. - 12 -Shutter ....................................................................................................................................... - 12 - Focus .......................................................................................................................................... - 12 - External Light ............................................................................................................................. - 12 - 2.6 Timelapse .......................................................................................................................... - 13 -Record Time ............................................................................................................................... - 13 - Movie Length ............................................................................................................................. - 13 - Interval ...................................................................................................................................... - 13 - Pictures ...................................................................................................................................... - 13 - 2.7 Features ............................................................................................................................. - 14 -Ping-Pong Mode ........................................................................................................................ - 14 - Step-By-Step Mode.................................................................................................................... - 14 - 2.8 Settings .............................................................................................................................. - 15 - Initialization ............................................................................................................................... - 15 - Timelapse .................................................................................................................................. - 15 - Controller Settings ..................................................................................................................... - 15 - 2.9 Control Unit Firmware Update .......................................................................................... - 16 -1.Control Unit ITSC1000The ITSC1000 Control Unit is a controller for timelapse and digital motion control for video and photo equipment. It allows to control up to 3 industrial class stepper motors and the triggering of shutter and focus of a connected camera. Most models of popular cameras are supported. Auxiliary input and output port for light control and motor control via an analog voltage is also available.For controlling the outputs the Control Unit has a built in Bluetooth® Smart 4.2 BLE compliant module that allows the connection to a BT LE (Low Energy or 4.0 or higher) capable Smartphone or Tablet. Applications for controlling the Unit are available for Android™ and iOS powered devices on App Stores.1.1Technical Data5.5/2.1mm or 5.5/2.5mm (Outer/Inner diameter)DC barrel - center positive9 –16 Vdc stabilized voltage1.2Interface DefinitionA, B, C) Motor ConnectorsThese are the connectors for connecting the bipolar stepping motors.The Motor of the Slider carriage needs to be connected at Port A.1)Supply DC ConnectorThe Supply DC Connector is the power source for Motor and Logic part. A stabilized DC voltage between 9 – 16 Vdc must be used. Typically 12V or 14V Battery packs are recommended. 2)Camera Trigger ConnectorControl Unit can control a camera through the wired remote shutter port with 2.5mm Klinke (3/32” Male TRS) connector. Standard Cables are available for most camera models on the market.Control Unit can control a camera through the wired remote shutter port with 2.5mm Klinke (3/32” Male TRS) connector. Standard Cables are available for most camera models on the market.The Camera Trigger Connector provides control over the focus and shutter trigger only, it is not possible to control ISO, aperture, or other settings of the camera over this port. If you set your camera to bulb mode the control unit can control the shutter speed (if your camera supports this mode).3)LED IndicatorThe blue LED Indicator shows the current status of the Control Unit. If no light is visible the Control Unit is unpowered or in Bootloader Mode.If the blue LED Indicator is flashing the Control Unit is waiting for a connection to a Control device (e.g. Smartphone or Tablet).If the blue LED Indicator is constantly on, the Control Unit is connected and ready to be used.4)USB ConnectorThe USB connector can be used to control the Control Unit via a PC (Software planned to be released in the future) and for firmware updates. Powering the Control Unit via USB is only possible for firmware updates, no Motor control is possible if no power is available on the Supply DC Connector.5)Auxiliary ConnectorThis Port can be used to connect accessories like a manual knob or external controls e.g. to control a light that is switching on and off before and after the picture taken for long duration time-lapse.6)Reset + Motor Off ButtonThis button can be pressed to reset the internal processor of the Control Unit. This causes also a sudden stop of all connected Motors. You can use it if the System does not react as desired to prevent from damaging equipment. Please take care that the Motors will not be powered after pressing. And in case of vertical usage and high load the carriage could be pulled down by gravity. After pressing the button the initialization of the slider needs to be repeated via the App.1.3Mounting and Dismounting on SliderMounting BracketTogether with the Control Unit comes a specialy designed mounting bracket to be mounted on the carriage of the Slider System.If you have bought the Control Unit as standalone device you first need to fix the mounting bracket on your slider system with two countersunk screws.If you have bought the set with Multi Slider the mounting plate is already fixed on the slider carriage.Mounting of Control UnitTo mount the Control Unit on the Mounting Bracket, first push the Control Unit on the mounting bracket so it is aligned with the hooks, then push the Control Unit to the right side as shown in picture till the snap-fit is in place.Dismounting of Control UnitTo dismount the Control Unit from the Mounting Bracket, first push down the snap-fit with a finger and move the Control Unit to the left while still holding down the snap-fit.1.4Handling and Safety InstructionsThe Control Unit is designed to be mounted with the included mounting bracket. Do not use another method of fixing the Control Unit to the Slider.Do not use the Control Unit in wet or humid environment like rain, snow, spray or waterfalls without extra protection against humidity intrusion in the electronic.Do not install this Unit near a heater, inflammable material or oily or dusty location or in a location continuously exposed to direct sunlight or in a location where gas may leak.Do not cover the Control Unit with Metal Objects to ensure proper operation of the wireless communication.Do not attempt to repair, disassemble, or modify the Unit by yourself. There are no serviceable parts inside and opening the Unit will void the warranty.Remove all foreign substances such as dust or water from the power plug terminals using a dry cloth on a regular basis. - Unplug all connectors and clean it with a dry cloth without alcohol or other solvents.Do not pull or excessively bend the cables. Do not twist or tie the cables. Do not hook the cables over a metal object or place a heavy object on the cables. Do not pull the cables, when unplugging unplug the connector by holding the plug. Do not put force on the cables in any direction when connected to the Control Unit, this can damage the Control Unit and connectors.Before switching on the power to the Control Unit ensure that the Motors can spin feely and no harm to humans, animals or objects is possible in case the connected motors start moving.Do not use the Control Unit if it is damaged, the isolation on the cables is damaged or it shows any abnormality like excessive heat dissipation that damaged the plastic housing.It is normal that the Control Unit gets warm during operation. To avoid overheating do not cover the Control Unit with thermally insulating material and allow free airflow.1.5TroubleshootingCamera does not trigger/focus when function in app is used.∙Please check the trigger cable if properly plugged in to the control unit’s CAM socket and to the camera.∙Check if the Camera is switch on.∙If focusing is not working check if the camera/lens is set to manual focus.∙Some cameras require settings in the menu to allow external trigger cable to be used, please check with the manual of your camera.Motor does not start when function in app is used.∙Please check if the motor cable is properly plugged into the control unit’s Motor socket and the right socket is used (Socket A for Slider).∙Check if the power supply is connected. If only USB is connected the Control Unit may connect to the App, but the Motors will not work.∙Check if supply voltage is in range 9-16 Vdc (The battery may be empty.)∙Check if any error information is shown in the App.1.6Regulatory HintsINSTRUCTION ABOUT THE WEEE MARKCorrect Disposal of This Product (Waste Electrical & Electronic Equipment)(Applicable in countries with separate collection systems) This marking on theproduct, accessories or literature indicates that the product and its electronicaccessories (cables, adapters,..) should not be disposed of with other household waste at the end of their working life. To prevent possible harm to the environment or human health from uncontrolled waste disposal, please separate these items from other types of waste and recycle them responsibly to promote the sustainable reuse of material resources. Household users should contact either the retailer where they purchased this product, or their local government office, for details of where and how they can take these items for environmentally safe recycling. Business users should contact their supplier and check the terms and conditions of the purchase contract. This product and its electronic accessories should not be mixed with other commercial wastes for disposal.USA:Canada:China:2.Mobile AppThe mobile app Multi Slider is used as wireless remote control for the MultiSlider Control Unit.2.1Operating SystemsThe Mobile App for controlling the motorized Multi Slider is available for Android and iOS Operating Systems.AndroidMin. Android Version: 5.0Google Play Store: https:///store/apps/details?id=at.waterbird.multislider iOSMin. iOS Version: 10.3Apple App Store: https:///app/multi-slider/id12738829242.2Connecting to Control UnitThe wireless connection to the Control Unit is established viaBluetooth Low Energy (4.0).Make sure the Control Unit is powered with 12V on the supplyconnector before you start the Multi Slider App. At initial Appstart you could be prompted to give necessary permission (e.g. toenable Bluetooth).During startup, the App scans for the Control Unit. If successful,the Multi Slider is presented on the screen. Connection isperformed by touching the Multi Slider entry.If the Multi Slider Control Unit was not found immediately, assurethe Control Unit is powered and its Blue LED flashes. Then restartthe scan by pulling down the “Update Device List” bar.Additionally you can try to restart the mobile phone and/or resetthe Control Unit.2.3System InitializationAfter powering or resetting the Control Unit the system is notinitialized. That means the software does not know the positionof the slider.Therefore the endpoints (HOME and END position) needs to beinitialized in order to gain full functionality.Initialization can be performed by 2-Point (default) or 1-Pointinitialization. (cf. 2.8 – Initialization Mode)With the initialization of the Multi Slider, the possible movementarea of the slide is bordered by the endpoints. This position areais used for all automated features like Timelapse and Ping-Pong.Furthermore, once initialization succeeded, it is not possible tomove the slide outside those defined endpoints.Initialization can be clear ed by hitting the blue “RESET” b utton.2-Point-InitializationFor 2-Point-Initialization the END Position needs to be initialized first. Therefore, use the b uttons “<<<” and “>>>” to move the slide to your intended END positio n and hit the blue “END” b utton.The label of the blue b utton changes from “END” to “HOME”. So move the slide to your intended HOM E position. After hitting the blue “HOME” button the system is initialized.1-Point-InitializationIf Initialization mode is set to 1-Piont-Initialization (cf. 2.8), then only the HOME position needs to be initialized.The END position is defined be the position area length stored on the Control Unit. Position and length can be changed by performing a 2-Point-Initialization and saving the controller settings afterwards. (cf. 2.8 – Controller Settings)2.4System ControlOnce the system is initialized, speed and acceleration can be configured as needed and the slider can be accurately positioned within the initialized endpoints.Speed and Acceleration ControlFor speed and acceleration adjustment there is a slider for roughconfiguration, and for high accurate adjustment “+/-” - buttonscan be used.The acceleration value is also used for deceleration when movingto a target position.Speed and acceleration values can also be changed during motormovement and those settings are even valid for features like Ping-Pong and Step-By-Step mode.PositioningThe “RESET” button clears the position initialization and newendpoints have to be configured.The “STOP” button immediately stops the motor with a fas t deceleration ramp.With “HOME” and “END”-buttons the slider can be sent to the initialized endpoints.The position slider offers a live view of the current slider position. Additionally it can be used to send the motor to a dedicated position within the initialized endpoints.With the touch-and-hold buttons “<<<” and “>>>” the motor moves into the dedicated direction as long as the button is pressed.Emergency StopFor emergency stop use the white reset button on the Control Unit (cf. 1.2-6). This can also be used when mobile App is not connected to the Control Unit.Keep in mind that emergency stop releases power from the motor, therefore in vertical mode motor is not actively held in position. This means that high loads can move downwards, forced by gravity.2.5Camera SettingsShutterIn the Shutter settings the exposure time (in seconds) of thecamera has to be defined.Exposure time is used for timelapse calculations. If this time is setto a value less than the camera needs to take the picture, thenthe slider might move during camera exposure.By pressing the “SHUT”-Button the settings can be verified withthe connected camera.FocusIn the Focus settings the camerafocus mode has to be defined(Manual Focus or Auto Focus).If Focus is set to AF, check how long your camera needs to focusthe object and set the value (in seconds).Focus time is used for timelapse calculations. If this time amountis not big enough, the shutter might be triggered before autofocusing is finished.External LightFor long time timelapse records, itmight be helpful to switch on anexternal light some time before thepicture is taken.Therefore it is possible to connect external controls (e.g. tocontrol a light) to the Auxiliary Connector of the Control Unit.The time amount in seconds defines the lead time for switchingon the light before taking the picture.By pressing the “ON” and “OFF” buttons correct functionality canbe tested.Timelapse setup is as easy as possible. Just set up Record Time, Movie Length (Duration) or Interval. Picture Amount and Motor Step Length are calculated automatically. Timelapse start and stop positions are the initialized endpoints HOME and END.Record TimeThis time defines the amount of time for full timelapse record.Setting Record Time to 0, means endless record time and also amotor step length of 0. This can be used for very long timelapserecords without any motorized slider connected (stand-aloneControl Unit).Movie LengthThis time is the final length of the time lapse movie, calculatedwith respect to the defined frames per second (FPS) setup (cf. 2.8– Timelapse Settings).In Duration mode an exact Movie Length can be defined andInterval time is calculated based on Record Time and MovieLength Setup.In Interval mode the Movie Length is calculated based on Record Time and Interval Setup.IntervalThe Interval time involves camera exposure and motor movement, and - if configured - also focus time and lead time for external light.In Interval mode an exact time amount for the interval can be configured. If the interval is set to a value that is physically not possible, the font color becomes red and timelapse cannot be started.In Duration mode the Interval time is calculated based on Record Time and Movie Length Setup.PicturesThis is the amount of exposures, calculation being based on timelapse configuration.This mode features infinite ping-pongs between the initializedendpoints HOME and END. It could be used for interviews.Delay Time defines the time for resting at an endpoint beforestarting again towards the other endpoint.Motor speed and acceleration can be changed in Main section ofthe app, even while Ping-Pong mode is active.This Mode is started using the “∞”-button and it is stopped bypressing the “STOP”-button.Step-By-Step ModeThis feature is used for “stop-motion” records or basically for moving a defined amount of steps.By press ing “←” and “→”-buttons the motor moves the configured step length into thededicated direction.InitializationInitialization mode can be configured as 1-point or 2-point. Details are described in chapter 2.3.TimelapseFor calculating of the final movie length of timelapse records, the FPS setting is used.Controller SettingsHit “SAVE”-button to permanently store the current parameters of the Control Unit like slider length or camera settings.To restore factory settings of the Control Unit use the “RESTORE” button.2.9Control Unit Firmware UpdateFrom time to time the firmware of the Control Unit willbe updated with new innovative features.Before starting the update, make sure you connectyour mobile device to power supply. It is alsorecommended to switch off mobile data and WIFIconnections, as the update process must not beinterrupted.With iOS devices the update will take around 3minutes. Depending on the Android device it mighttake up to 6 minutes.Do not close the update screen or lock the device whilethe update process is ongoing.If the update fails or if it is interrupted (e.g. by externalcalls), it needs to be restarted.With some Android devices the update process failspermanently. Please use an Apple IPhone or tryanother Android device for updating the Control Unit.。
SAP程序命名规则
长虹集团E-HR项目SAP程序命名规则四川虹信软件有限公司2013年5月2日文档修订记录:目录第1章目标 (4)第2章知识对象的命名规范 (5)2.1程序命名规范(程序的事务代码同理) (5)2.2数据字典的命名规范 (6)第3章代码规范 (6)3.1代码单元命名规范 (7)3.2变量命名规则 (7)3.2.1自定义变量 (7)3.2.2函数参数命名规则: (8)3.3屏幕编号规则 (8)3.4S T A TUS命名规则 (8)3.5注释规则 (8)3.6事件代码参照编写内容及顺序 (9)3.7共用函数说明规范 (13)第1章目标规范长虹HR项目程序、数据字典等知识对象的命名规范;规范长虹HR项目代码开发的书写规范,提高代码的可读性。
第2章知识对象的命名规范2.1 程序命名规范(程序的事务代码同理)ZXXMNNNN注意:所有命名都必须是大写字母XX: 应用代码(以下为常用的主模块列表,可根据需要细化到子模块)⏹SD: Sales Distribution 营销管理⏹MM: Material Management 资财管理(原材料管理)⏹PP: Production Planning 生产制造计划⏹FI: Financial Accounting 总帐基本会计⏹CO: Controlling 控制管理会计⏹AM: Asset Management 资产管理固定资产管理⏹HR: Human Resource 人力资源⏹QM: Quality Management 质量管理⏹PM: Plant Management 设备管理⏹PS: Project Management 项目管理⏹PL: Product Lifecycle Management 产品生命周期管理⏹WF: Work Flow 业务流程例如Himas,One system⏹IS: Industry Solution 产业研发⏹OT: Other 其它M: 程序类型⏹R: REPORT报表⏹F: FORM(SAP SCRIPT, SMARTFORM)文档格式⏹U:Update数据库更新程序⏹G:功能程序⏹I: INTERFACE接口⏹E: ENHANCEMENT增强⏹B: BATCH OPERATION 批处理NNNN: 四位数字流水码示例:ZHRR0001,即为HR模块的第1个报表程序。
一些有用的CATIA环境变量参数
一些有用的CATIA环境变量参数!CATLM_ODTS=1 –启动时不显示许可证错误CATNoStartDocument=no –启动时不产生productCNEXTBACKGROUND = no –启动时不产生背景颜色CNEXTSPLASHSCREEN = no –启动时不显示ds星空L_WILSON_LAN=1 - 支持生成Wilson曲线CGM_ROLLINGOFFSET=1 –在GSD模式下可以进行旋转偏移TAILLE_MEMOIRE_CHOISIE=1 – IGES最优化输出SHOW_CST_CHILDREN = 1 –草图绘制中,父级说明强调显示CNEXTOUTPUT = console –在windows命令中显示CATIA的logoMM_NO_REPLACE = 1 –无关联组件装配复位IRD_PRODUCTTOPART=1 装配模式下隐藏PRINT_WITHOUT_DEPTH=1 –移除打印 (限 V5R10)MFG_MULTI_MP_APPLY = 1 –多实例制造过程MFG_CATMFG_REMOVE_MOTION_TOOL_CHANGE = 1 –移除到 X Y Z在开始>catia>tools>Enoironment edit CATIA的环境变量编辑器,添加就可以了转帖][转帖]CATIA环境变量.达到快速启动CATIACATIA环境变量CATLM_ODTS=1 - Disable license error messages at startupL_WILSON_LAN=1 - Access to Wilson's spline curves CGM_ROLLINGOFFSET=1 - Access to the Rolling Offset option in GSD 多出一个图标TAILLE_MEMOIRE_CHOISIE=1 - Optimize IGES export memory CATNoStartDocument=no - Disable product at startup 能大大提高Catia的启动速度,非常实用哦CNEXTBACKGROUND = no - Disable sky background at startup CNEXTSPLASHSCREEN = no - Disable display of planet at startupSHOW_CST_CHILDREN = 1 - Display stresses in the parents specification tree in sketcher CNEXTOUTPUT = console - Display Catia's logs in command windows MM_NO_REPLACE = 1 –分享] 一些详细的CATIA环境变量加快启动的方法:From Programs->Catia_P3->Tools->Environment EditorSelect Catia_P3 in the top window, thenRight Click in the bottom window, select New variableAdd:CNEXTSPLASHSCREEN = noCATNoStartDocument = yesCNEXTBACKGROUND = no更详细的CATLM_ODTS=1- Disable license error messages at startupL_WILSON_LAN=1- Access to Wilson's spline curvesCGM_ROLLINGOFFSET=1- Access to the Rolling Offset option in GSDTAILLE_MEMOIRE_CHOISIE=1- Optimize IGES export memory CATNoStartDocument=no- Disable product at startup CNEXTBACKGROUND = no- Disable sky background at startup CNEXTSPLASHSCREEN = no- Disable display of planet at startu pSHOW_CST_CHILDREN = 1- Display stresses in the parents spe cification tree in sketcherCNEXTOUTPUT = console- Display Catia's logs in command wind owsMM_NO_REPLACE = 1- Associativty about replacement of compo nents cloned with differentIRD_PRODUCTTOPART=1- It will enable a hidden fuction: CATP roduct to CATPart...and, in "Assembly WorkBench" look under Tools menuPRINT_WITHOUT_DEPTH=1- remove the mask from the text o n the print (only in V5R10)MFG_MULTI_MP_APPLY = 1- multi instantation the manufacturi ng processMFG_CATMFG_REMOVE_MOTION_TOOL_CHANGE = 1- remov e th GOTO X Y Z during toolchange in APT file CNEXTSPLASHSCREEN = no#不显示启动行星动画,如果你想更换为自己的LOGO可替换如下文件即可!。
system initialize 模块
system initialize 模块什么是[system initialize 模块]?系统初始化模块是计算机操作系统中的一个重要组成部分,用于在计算机启动时进行系统资源的初始化、配置和分配工作。
系统初始化的目的是确保操作系统和相关程序能够正常运行,以及提供正确的环境给用户。
为什么系统需要初始化?系统初始化是整个计算机系统启动过程中的第一步,它的目的有以下几个方面:1. 资源分配:系统初始化模块负责将计算机的硬件资源(如CPU、内存、硬盘等)分配给操作系统和其他应用程序使用。
通过初始化,系统能够识别和管理所有的硬件设备,并为它们分配正确的驱动程序和资源。
2. 系统配置:系统初始化模块还负责配置系统的基本参数和选项,如系统的语言、时区、显示分辨率等,以及各个硬件设备和外围设备的工作参数。
这些配置信息的正确设置能够保证系统的正常运行和充分发挥硬件设备的性能。
3. 异常处理:系统初始化模块还需要处理各种异常情况,如硬件设备故障、驱动程序不匹配等。
通过初始化过程,系统可以自动识别和处理这些异常,保证系统的稳定性和可靠性。
4. 启动顺序:系统初始化模块决定了计算机启动过程中的各个环节和步骤的顺序,确保操作系统和其他重要程序按正确的顺序加载和执行。
这是整个计算机系统能够正常启动和运行的基础。
系统初始化模块的工作流程是怎样的?系统初始化模块的工作流程可以分为以下几个步骤:1. 加载引导程序:计算机启动时,系统初始化模块首先会加载引导程序(bootloader)到内存中,引导程序负责引导操作系统的启动。
2. 初始化基本硬件资源:这一步骤中,系统初始化模块会识别并初始化计算机的基本硬件资源,如CPU、内存、硬盘、显示器等。
它会分配正确的驱动程序和资源,确保这些硬件设备能够正常工作。
3. 配置系统参数:系统初始化模块会读取配置文件或用户设置,配置系统的基本参数和选项,如系统语言、时区、显示分辨率等。
这些参数的正确设置能够满足用户的需求,并确保系统的正常运行。
硬件设置文件SYSTEM.INI文件详解
硬件设置文件SYSTEM.INI文件详解SYSTEM.INI文件的组成SYSTEM.INI文件包含若干小节,每一节由一组相关的设定组成。
其中小节和设定的格式如下:[小节名]关键字名=值组成SYSTEM.INI文件的主要小节名称和说明如下:段名说明[Boot] 驱动程序和Windows模块清单[Keyboard] 包括有关键盘的信息[Boot.description] 可通过Windows Setup修改的设备名[386Enh] 386Enhanced模式下的Windows需要使用的信息 (enhanced [in'ha:nst] 增强的,增强型)[NonWindowsApp] 非Windows应用程序使用的信息[MCI] Media Control InterFace(MCI)驱动程序清单[Drivers] 可安装的驱动程序名或别名清单[Drivers32] 可安装的32位驱动程序名或别名清单[TTFontDimenCache] Win 95的TTF字库的Cache配置注:修改SYSTEM.INI中的主要设置项是非常危险的,很可能导致Windows任务的致命错误。
SYSTEM.INI文件配置详解释1.[Boot][Boot]记录了中文Win 95启动时建立的一些基本设置。
最重要的有Win 95的外壳程序(SHELL程序)。
通常此SHELL程序为Win 95资源管理器,但也可以是其它程序,如程序管理器(Program Manager)、文件管理器 ( File Manager) 等。
该节中,除CacheFileHandles之外,其它设定都是必需的。
如果修改或删除其中一个设定,Win 95可能就无法正常工作。
对没有固定的缺省值的设置项,Win 95将根据系统配置对其进行设定。
(1)Comm.drv=文件名(缺省值:COMM.DRV)该项用于指定系统使用的串行通讯驱动程序名。
若用户从使用了第三方通讯驱动程序的Win 3.x 环境升级,则Win 95将不会用Microsoft的COMM.DRV 来代替原有的驱动程序,这时,需要在SYSTEM.INI的[386Enh]段中加入设置项:Commdrv30=ON。
MMU初始化部分分析
MMU初始化部分分析MMU初始化部分分析void MMU_Init(MMU_Table table[]){//==========================IMPORTANT NOTE========================= //The current stack and code area can't be re-mapped in this routine.//If you want memory map mapped freely,your own sophiscated MMU//initialization code is needed.//===================================== ==============================上面部分的中文意思是:这段程序不能实现当前堆栈和代码区域的重新映射,假如你想让存储区域自由映射,需要你自己编写一个细致入微的MMU初始化代码。
MMU_DisableDCache();MMU_DisableICache();MMU_InvalidateDCache();//invalidate data cache allMMU_DCacheCleanInvalidateAll();MMU_InvalidateICache();#if0//To complete MMU_Init()fast,Icache may be turned on here.MMU_EnableICache();#endifMMU_DisableMMU();MMU_InvalidateTLB();for(;table->vEnd;table++)MMU_SetMTT(table->vStart,table->vEnd,table->pStart,tabl e->attr);MMU_SetTTBase(_MMUTT_STARTADDRESS);MMU_SetDomain(0x55555550|DOMAIN1_ATTR|DOMAIN0_ ATTR);//DOMAIN1:no_access,DOMAIN0,2~15=client(AP is checked)MMU_SetProcessId(0x0);MMU_EnableAlignFault();MMU_EnableMMU();MMU_EnableICache();MMU_EnableDCache();//DCache should be turned on after MMU is turned on.}从上至下一条一条分析首先执行MMU_DisableDCache();程序跳转到2410slib.s文件的函数体MMU_DisableDCachemrc p15,0,r0,c1,c0,0bic r0,r0,#R1_Cmcr p15,0,r0,c1,c0,0MOV_PC_LR其中mrc是协处理器命令。
原创DVD电影制作与观看设备说明书

share• produce original DVD movies, then view using most DVD players and DVD-ROM drives • convenient viewing options—jump to DVD video scenes without fast forwarding or rewinding• direct your original DVD movies with included easy-to-use software • create custom photo, music and data CDs to store or sharestore• record up to 3 hours of video or save photos, music or data to a single 4.7 GB rewritable DVD+RW disc• create DVDs at speeds of up to 2.4x rewrite • view DVDs with up to 8x read speed• create CDs at speeds of up to 12x write and 10x rewrite • quickly access files stored on CD with up to 32x read speed• create original music CDs or store up to 700 MB of data on a CDflexible• your choice—write to either DVD or CD discs using the DVD+RW or CD-RW drive• transfer digital video directly from your digital video camcorder to a DVD+RW disc (requires a 1394 interface port on your PC)• transfer analog video directly from your camcorder or VCR to a DVD+RW disc (requires analog video capture and compression capability on your PC)Gather your audience and show your original DVD creations. The HP dvd-writer dvd100i easily stores your favorite original video, photo, and music files. You can record up to 3 hours of video or save photos, graphics, music or data to a 4.7 GB DVD disc. Create DVD movies with the included easy-to-use software. View DVD scenes quickly without having to fast forward or rewind. Transfer digital or analog video directly from your camcorder to a DVD disc (requires video capture capability on PC). And better yet—write to either DVDs or CDs. The dvd100i also offers 12x10x32x CD-RW capabilities. You can record up to 80 minutes of original music or store up to 700 MB of photos or data on a single CD. The dvd100i includes HP's buffer underrun prevention technology which enables you to reliably create a DVD+RW or CD while you work on other tasks on your PC. Create custom DVDsor CDs with the DVD+RW and CD-RW* drive. It’s your choice.hp dvd-writer dvd100idata sheet* Intended only for creation and storage of your original material or other lawful uses.Technical SpecificationsFor More InformationVisit us on the world wide web at .Microsoft and Windows are U.S. registered trademarks of Microsoft Corporation.ENERGY STAR is a U.S. registered service mark of the U.S. EPA.As an ENERGY STAR Partner, Hewlett-Packard Company has determined this product meets ENERGY STAR Guidelines for energy efficiency. All other brand and product names aretrademarks or registered trademarks of their respective companies.The information contained in this document is subject to change without notice.InterfaceIDELoading MechanismTray, dust sealed Buffering2 MBWrite MethodsCreate:track at once, disk at once, variable and fixed packet writing Copy:session at once, multisession Power Requirements+5 VDC ±5% +12 VDC ±10% Logical Recording FormatUDF , ISO 9660, CD-DA Encoding MethodEFM, EFM PlusPerformanceSustained transfer rate1x CD = 150 KB/s (data mode 1)1x DVD = 1353 KB/s Write:CD-R: 4x, 8x, 12xCD-RW: 4x,10xDVD+RW: 2.4x (CLV)Read:CD-R: 4x, 8x, 10x, 20x, 32x (CAV)CD-RW: 2x, 4x, 8x - 20x (CAV)DVD+RW: 8x (CAV)Burst transfer rate:33 MB/second Seek time:125 ms average random access (CD-ROM, DVD-ROM)250 ms average full-stroke access (CD-ROM, DVD-ROM)Initialization time at 2x:<20 secDisc finalization time:DVD+RW: up to 3 minutes at 2.4x (1x DVD = 1353 KB/s))CD: 2 minutes typical at 2x (1x CD = 150 KB/s (data mode 1))ReliabilityCorrected error rate:Audio Data Mode 2, and Mode 2 Form 2: less than 1uncorrectable frame in 109bits read. Data Mode 1and Mode 2 Form 1- less than 1uncorrected frame in 1012bits read.Media CompatibilityWrite: DVD+RW discs, CD-R (74 and 80 minute), and CD-RW, high-speed CD-RW media (recommend hp branded media)Read: CD Digital-Audio (Red book) and CD extra, CD-ROM (Mode 1- Yellow book), CD-ROM XA & CD-I (Mode 2/Form 1- Green book), CD-ROM XA & CD-I(Mode 2/Form 2 - Green book), CD-Bridge & Photo-CD (single and multi-session), CD-Video,DVD-ROM, DVD-Video, DVD+RWEnvironmental RangesOperating temperature:5°to 40°C (41°to 104°F)Operating humidity:10% to 90% RH non-condensing AcousticsSound power:7.0 B(A) (per ISO 9296)Sound pressure:70 dB (A) Power Consumption25 watts maximumMinimum System RequirementsGeneral:150 MB free for included software installation, 5 GB free for DVD disc creation Data storage applications:450 MHz Pentium II processor or equivalent, 64 MB RAM DVD video disc creation:800 MHz Pentium III processor or higher, 128 MB RAM, video capture capability (1394 interface or analog video capture card)Microsoft Windows Me, 98, 2000 ProfessionalNT 4.0 workstation with SP5 supported for data storage and backup applications only (video disc creation not supported)Windows NT 4.0 Server, Windows 2000 Server/Advanced Server, and all versions of Windows CE are not supported.Dimensions (w x d x h)7.79 x 5.75 x 1.62 in (198 x 146 x 41.3 mm)Weight2 lb (.9 kg)WarrantyOne-year limited hardware warranty backed by hp customer careWhat’s in the BoxInternal IDE DVD+RW/CD-RW drive with buffer underrun prevention technology, software with integrated install, set-up poster, support guide, getting help guide, how do I? guide,audio cable, 1blank DVD+RW disc, IDE cable, and screws.Does Not Include (purchase separately):video capture and compression hardware for down load of video to PC Software IncludedHP MyDVD VideoIncorporate your video footage, photos and music into DVD titles that you can view and share on most DVD-ROM and DVD players. Easily transfer your video footage directly from your camcorder or VCR to DVD discs. Cut unwanted video footage, rearrange scenes to create a more dynamic, enjoyable viewing experience for your audience.Jump to video scenes on DVD randomly and quickly without fast forwarding or rewinding.HP DLADrag and drop files to CD or DVD from Windows Explorer or save directly from any application. HP RecordNowCreate data or music CDs that you can share with most CD-ROM or audio CD players.Create data DVDs that you can share with most DVD-ROM drives. HP Simple BackupReliably backup, protect and restore individual files or folders or restore your entire hard drive. Includes disaster recovery. PowerDVD™Play DVD movies on your PCC9619AHP dvd-writer dvd100i internal IDE DVD+RW/CD-RW driveDVD: 2.4x re-write, 8x read; CD: 12x10x32xCD-R Recordable Mediahp CD-R recordable disc C7989A 74 minute, 10-packjewel casehp CD-R recordable disc C7990A 74 minute, 50-packon a spindlehp CD-R recordable disc C8000A 80 minute, 10-packjewel casehp CD-R recordable disc C8001A 74 minute, single jewelcase in boxes of 25hp CD-R recordable disc C8003A 80 minute, 50-packon a spindlehp CD-R recordable disc C8005A 80 minute, 50-packon a spindlehp CD-R recordable disc C7991A 80 minute, 10-packjewel case CD-RW Rewritable Mediahp CD-RW rewritable disc C4438A 74 minute, 1packjewel casehp CD-RW rewritable high-speed disc C7981A 74 minute 1packjewel caseDVD+RW Rewritable Media hp DVD+RW rewritable disc C8008A single, jewel caseOrdering Information© Hewlett-Packard Company 20015980-6957ENUC 08/01HP dvd-writer dvd100i。
电动升降桌用户手册说明书
Please read this manual before assembly.If this desk is sold, please provide the manual to the buyerUSER MANUALHeight Adjustable Standing DeskNote: Desktop must be purchased separatelySafety Information & Usage01 Package Contents and Part List02 Assembly Instructions04 Operational Guide08 Technical Specificaitons09 Trouble Shooting Table09 Accessories10 Warranty Information11This height adjustable desk has electric motors and is designed for use in dry work areas only.The desk height is adjustable so that it can be positioned at the most ergonomically suitable height.Any other use is at user’s risk.Under no circumstances does the manufacturer accept warranty claims or liability claims for damages caused from improper use or handling of the desk frame.When using this product, basic precautions should always be followed. Read all instructions before using the desk. FAILURE TO COMPLY WITH OR OBSERVE ALL INSTRUCTIONS AND WARNINGS REGARDING THE USE OF THIS PRODUCT MAY RESUL T IN SERIOUS PROPERTY DAMAGE OR BODIL Y INJURY.DANGER - To reduce the risk of electric shock, always unplug the electrical outlet before cleaning, or before putting on or taking off parts.(included)Phillips Head Screwdriverand/or Power DrillTape MeasureTOOLSPARTS AND HARDWARE LISTTIGHTEN ALL THE SCREWS OF THE FRAME TO AVOID WOBBLING. IF THE DESKWOBBLES, TIGHTEN ALL THE SCREWS AGAIN.ATTENTION112A 113B4PARTSHARDWARESupport Beam x1Power Cable x1M8*16Screw x8M6*10Screw x4M6*12Screw x12ST3.5*16Screw x2ST4.8*16Screw x2ST4.8*19Screw x6Rubber Cushion x6Plastic Pad x6Plastic Mat x2Cable Tie x54mmHex Spanner x15mmHex Spanner x1NOTE: QUANTITY OF SOME SCREWS OR PARTS MAYBE MORE THAN MENTIONED. IF ANY CONTENT IS LESS OR MISSING PLEASE CONTACT USOR OUR RESELLER ASAP, DO NOT PROCEED WITH THE ASSEMBLY.Lifting System x1(Leg x2 + Keypad x1 + Control Box x1)Feet x2Bracket x2STEP 1Loosen 4 pcs M6*10 screws, they were attached before packing. Adjust the crossbar to proper position and then tighten the 8 pcs screws.STEP 2Attach legs to support beam ends using 8 pcs M6*12 screws.STEP 3Attach feet to leg using 8 pcs M8*16 screws and tighten with4mm hex spanner.STEP 4Attach brackets to each support beam end using 4 pcs M6*12 screws.STEP 5Put rubber cushions and plastic pads on the side brackets and support beam.STEP 6Attach the brackets and the support beam to the table top using 6 pcs ST4.8*19 screws. Attach the control box using 2pcs ST4.8*16 screws Attach the keypad to the table top using 2 pcs ST3.5*16 screws.Note: If your desktop does not have pre drilled holes, attach the frame with screws into the desk surface with an electric screwdriver.STEP 7Plug cables from two motors to the control box and cable from the keypad.1.System Initialization4.Cm and Inch Setting-Press “1”“2” and “3” button together for about 5 seconds, “C-I” should appear on the display, either press button “1” display show the desk is in metric mode or press button “2” display the desk is in Imperial ( inches ) mode .5.Notice-Press “1”“2” and “3” button together for about 5 seconds,“C-I” should appear on the display, either press button “1” display show the desk is in metric mode or press button “2” display the desk is in Imperial ( inches ) mode .-The system should be away from water and corrosion resistant gas.Please contact us or our distributors if there is anything wrong with the product.2.Normal Operation-When the desk rises to the height which you want to memorize, please press and hold the “↑”“1”button till display “P1”. Position 1 is now memorized. Please press and hold the “↑”“2” button till display “P2”. Position 2 is now memorized. These two number buttons can memorize two different heights repeatedly. And those data won’t be lost in case power is off.3.Setting the Memory Function-Drive the desk to the desired height when pressing and holding “↑” or “↓" button.The initialization procedure must be completed after the system has been installed,before its first run and after the replacement of any parts.Resetting procedure is as follows:-Press and hold on both “↑” and “↓" button together for 10-15 seconds and screen would show (000)until the lifting column be lowest and you will hear a beep, and the display shows the number for the l owest height, then whole steps finishes.-If the system doesn’t work normally when we use it, we need to repeat the above procedure.Frame SizeHeight Range(Without Top)Feet 25.2’’-50.8’’27.6’’Max Loading Speed Duty Cycle264lbs1.6’’/s (without load)10%. Max. 2 Min on, 18 mins off Soft start / stop 3 Memory Presents(42.3’’-70.9’’)*23.6’’ Height Adjustable Standing DeskProblemCodePossible Cause SolutionThe table stops during operation and thecontrol unit “beeps” 3 times.The height alteration of the desk is being overused and is exceeding the standard duty cycle.Stop using and let sit for 20 minutes.The table stops during operation and the control unit “beeps” 2 times.The legs are unbalanced.Balance the legs and restart.While pressing any button, the table stops moving and springs-back 40mm.The anti-collision function is blocked by an obstacle. Remove any obstacles intervening with the table’s vertical movement.While pressing any button, the table stops moving and springs-back 30mm.T-touch protection.•Make sure the control box in horizontalplace.•Make sure the control box fastened tightly.•Remove any obstacles.Control panel shows ‘E00’, no beeps.Unrest for the system.Press and hold on both “↑” and “↓" button together for 10-15 seconds and screen would show (000) until the lifting column be lowest and you will hear a beep, and the display shows the number for the lowest height, then whole steps finishes.E01E02E03E04E00This desk frame is enabled with Bluetooth technology. You can download the App THE BLUETOOTH AND SMART APP IS AN ADD ON BONUS FEATURE WE PROVIDE WITH THE DESK. WE ARE NOT LIABLE FOR ANY ERRORS OR GLITCHES OF THE APP. SOME DEVICES MAY NOT BEABLE TO USE ALL THE FEATURES OR BE COMPATIBLE WITH THE SMART APP.“Stand up pls.” on your iOS devices and control the desk from your phone.The app provides a smarter and easier way to adjust your ergonomic desk. It allows you to control the height adjustable desk from your mobile device via Bluetooth.The key features include:Bluetooth synchronization Memory functionCustomized sit/stand cycleTracking/ calculating of calories burned Safety support- error alarm notices DISCLAIMERHeight Adjustable Standing DeskSysterm requires: iOS 13.0 or higher.Bluetooth & Smart AppConnect bluetooth dongle to the back of handset.This Warranty covers any defects in material or workmanship under normal use during the first five years from the date of purchase.The Warranty covers parts and labor costs to repair your Product if the product fails to properly operate due to defects in materials or workmanship of the frame, electric motors, control box, push-button control panel and the desktop. If we determine, at our sole discretion, that your Product cannot be repaired, we will replace it with a Product of like kind and quality that is of comparable performance. Replacement parts or products may be new or repaired to meet the specifications of the original p roduct at our discretion.Conditions, malfunctions or damage not resulting from defects in material or workmanship.Changes in sur face finish, including color-fastness or matching of colors, woodgrains, or textures Damage to your Product caused by accident, abuse, neglect, intentional physical damage, misuse (including faulty installation, repair, or maintenance by anyone other than the Manufacturer’s authorized service provider)Normal wear and tearDye transfers caused by external contaminantsModifications made by the user which is not authorizedProducts that were not installed, used, or maintained in accordance with product instructions and warningsDamage or marking of surfaces caused by sharp or foreign objectWhat does this warranty cover?How long does the coverage last?The Warranty Period any of the official resellers is 5 years from the date of purchase.A replacement product or part resumes the remaining warranty of the original product.What does this limited warranty not cover?This Warranty does not cover any problem that is caused by:How to claim Warranty?To obtain warranty service, you must first contact our official retailer or us in order to determine the problem.Warranty Info.Manufacturer Warranty Info.(FOR HEIGHT ADJUSTABLE FRAMENote: You must present proof of purchase (Receipt) to Obtain warranty service.Height Adjustable Standing Desk。
索尼IMX304LQR IMX304LLR传感器模块说明书

FSM-IMX304 DatasheetSony IMX304LQR / IMX304LLR Sensor ModuleFRAMOS Sensor ModuleSpecification Model Name FSM-IMX304M / FSM-IMX304C (v1)Image Sensor Vendor / Name SonyIMX304LQR / IMX304LLR Shutter Type CMOS Global Shutter Chromaticity Color / Mono Optical Format 1.1“Pixel Size3.45 x 3.45 µmMax. Resolution 12.4 Mpx / 4112 x 3008 px Framerate (max.) 23 FPS (at full resolution) Bit Depth(s) 12 bitInterfaceData InterfaceSubLVDS (4 / 8 Lane) Communication Interface I²C (4-wire serial)Drive Frequency(s) 37.125 / 54 / 74.25 MHz Input Voltages1.2V, 1.8V, 3.3VInterface Connector Hirose DF40C-60DP-0.4V(51) EEPROM (Sensor ID) YesMechanical Dimensions (HxWxD) 28 mm x 28 mmEnvironmental Operating Temperature -30°C to +75°C (function) -10°C to +60°C (performance) Storage Temperature -40°C to +85°CAmbient Humidity 20% to 95% RH, non condensing Software Support (requires FSA with MIPI CSI-2 conversion)DriverV4L2 Based Device DriverSupported Platform(s) NVIDIA Jetson TX2 / AGX Xavier Linux Version(s) L4T 32.2.1 (JetPack 4.2.2) API Languages C / C++Suggested AccessoriesFlex Cable 150 mm (FSM to FSA) FMA-FC-150/60 Lens Mounts:C/CS-Mount optionA matrix with compatible Sensor Adapters (FSA) and Processor Board Adapters (FPA) for single- and multi-sensor setups can be found separately at the end of this document.Key Benefits & Features:▪ 12.4 Mpx Sony CMOS Global Shutter sensormodule, ready to embed!▪ All FSMs are part of a rapid prototypingecosystem, consisting of:✓ Adapters to various processing boards ✓ Design sources for deep embedding✓ Various accessories and design in servicesFSM-IMX304M (Monochrome):FSM-IMX304C (Color):Development kits availablePin 1 according to print on PCB.Mechanical DrawingSensor image optical center is in mechanical board center.Connector PinoutType: Hirose DF40C-60DP-0.4V(51)Mating Type: Hirose DF40HC(4.0)-60DS-0.4V(51)N a m eN C N C 3V 3 3V 3 1V 8G N DG N DS D AS D O T O U T 0T O U T 1T O U T 2N CN CN CG N DR S TM C L KG N DD _D A T A _6_PD _D A T A _6_NG N DD _D A T A _4_PD _D A T A _4_NG N DD _D A T A _2_PD _D A T A _2_NG N D D _D A T A _0_P D _D A T A _0_N Pin 1 3 5 7 9 11 13 15 17 19 21 23 25 27 29 31 33 35 37 39 41 43 45 47 49 51 53 55 57 59Pin 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34 36 38 40 42 44 46 48 50 52 54 56 58 60N a m e1V 8_E E P R O M 1V 8_E E P R O M 1V 2 1V 2 N CG N DG N DS C LX C ES L A M O D EX M A S T E RN CX T R I GX H SX V SG N DD _D A T A _7_PD _D A T A _7_NG N DD _D A T A _5_PD _D A T A _5_NG N DD _D A T A _3_PD _D A T A _3_NG N DD _D A T A _1_PD _D A T A _1_NG N DD _C L K _0_PD _C L K _0_NSignals are routed directly from image sensor to connector. Details on specific signals are described in the respective image sensor datasheet.Table of Contents1 FRAMOS Sensor Module Ecosystem (4)2 Software Package and Drivers (5)2.1 Reference Software: NVIDIA Jetson TX2, AGX Xavier (6)2.1.1 Platform and Sensor Device Drivers (6)2.1.2 Image Pre-Processing Examples (7)3 Ecosystem Compatibility Matrix (10)3.1 Hardware Support (10)1FRAMOS Sensor Module EcosystemThe FSM Ecosystem consists of FRAMOS Sensor Modules, Adapters, Software and Sources, and provides one coherent solution supporting the whole process of integrating image sensors into embedded vision products. During the evaluation and proof-of-concept phase, off-the-shelf sensor modules with a versatile adapter framework allow the connection of latest image sensor technology to open processing platforms, like the NVIDIA Jetson TX2, AGX Xavier or the standard. Reference drivers and sample applications deliver images immediately after installation, supporting V4L2 and an optional derivate API providing comfortable integration. Within the development phase, electrical design references and driver sources guide with a solid and proven baseline to quickly port into individual system designs and extend scope, while decreasing risk and efforts.To simplify and relieve the whole supply chain, all FRAMOS Sensor Modules and adapters are optimized and ready for delivery in volume and customization with pre-configured lens holder, lens and further accessories.Key Benefits & FeaturesHardware Offering:▪Off-the-shelf FRAMOS Sensor Modules (FSM), ready for evaluation and mass production.▪Versatile adapter framework, allowing flexible testing of different modules, on different processing boards:▪FRAMOS Sensor Adapter (FSA)–everything the specific sensor needs for operation▪FPAMOS Processor Adapter (FPA)– connecting up to four FSM + FSA to a specific processor board▪From lenses, mechanics and cables, all needed imaging accessories from one hand Software Package:▪Drivers providing base level sensor integration:▪Platform specific device drivers▪V4L2 subdevice drivers for specific image sensors (low-level C API)▪Streamlined V4L2 library (LibSV) with comfortable and generic C/C++ API▪Example application demonstrating initialization, basic configuration and image stream processingFurther to off-the-shelf hard- and software, the Ecosystem supports you with:▪Driver sources allowing the focus on application specific scope and sensor features▪Electrical references for FSA and FPA, supporting quick and optimized embedding of FSMs▪Enginee ring services via FRAMOS and its partners, allowing you to focus on your product’s unique valueProcessing Board2Software Package and DriversAs FRAMOS we know that the getting started with a new technology is the biggest challenge. The idea behind the Software Pack is to enable embedded software engineers to get quickly to a streaming system and provide at the same time all tools that are needed to extend and adapt it according the individual needs of the application.What the software package and driver are:▪ A reference for a custom sensor implementation▪Demonstrating how to use the required interfaces▪Demonstrating how to communicate with the image sensor▪Demonstrating how to generaly initialize and configure the image sensor▪Provide initial image streaming output to the user space▪Demonstrating how to run basic image processing on pixel dataWhat it is not:▪ A fully featured camera implementation (not all sensors features implemented)▪Ready to be use in the field▪ A benchmark for the capabilities of the image sensor▪Focused on image processingSupported Processor PlatformsThe table below shows which platforms are supported by the standard driver package, and how many FSMs can at maximum be operated in parallel.Sensor ModuleNVIDIAJetson TX2NVIDIAAGX XavierDragonBoard410c96BoardsConsumer EditionXilinxDevelopment BoardsFSM-AR0144 4HW only, driver development on project basis.HW only, driver development on projectbasis.FSM-AR0521 4 2FSM-AR1335 4FSM-HDP230 2 4FSM-IMX264 2 4FSM-IMX283 2 4FSM-IMX290 4 2FSM-IMX296 4 2FSM-IMX297 4FSM-IMX304 2 4FSM-IMX327 4 2FSM-IMX334 2 4FSM-IMX335 4FSM-IMX412 4 2FSM-IMX415 4FSM-IMX462 4FSM-IMX477 4FSM-IMX485 4FSM-IMX577 4FSM-IMX530 2 4 11 1 SLVS-EC based FPGA reference implementation as part of the SLVS-EC RX IP Core offering.Table 1: Ecosystem Software Package - Supported number of FSMs per processing board2.1Reference Software: NVIDIA Jetson TX2, AGX XavierThe software package provided with the Development Kits of the FRAMOS Sensor Module Ecosystem provided for NVIDIA Jetson platforms provides a reference implementation of sensor and device drivers for MIPI CSI-2. It contains a minimum feature set demonstrating how to utilize the platform specific data interface and communication implementation, as well as the initialization of the image sensor and implementation of basic features.Package Content:▪Platform and device drivers with Linux for Tegra Support▪V4L2 based subdevice drivers (low-level C API)▪Streamlined V4L2 library (LibSV) providing generic C/C++ API▪Image Pre-Processing Examples:▪OpenCV (Software)▪LibArgus (Hardware)2.1.1Platform and Sensor Device DriversImage Modes – Image Format and SpeedsTheir impact of several major attributes to the main configuration of the image data stream formatting, requires a static pre-configuration within the device tree:▪Image / streaming resolution▪Pixel format / bit depth▪Data rate / lane configurationEach driver provides access to 3 –5 pre-built configurations, reflecting the main operation modes of the imager. Beside the full resolution, that is always available, they allow to receive image streams in common video resolutions like VGA, Full HD and UHD as they are supported or make sense by the imagers, and utilize sensor features like ROI and binning.They act as an example for implementation and usage and are available as source. Due to the size limitation of the device tree, it is not possible to integrate an extensive set of options.General Features – Sensor AttributesThe drivers as part of the Software Pack support the sensor features as shown in the table below.Pre-Implemented Features per ModelG a i n (A n a l o g / D i g i t a l )F r a m e R a t eE x p o s u r e T i m eF l i p / M i r r o rI S M o d e (M a s t e r / S l a v e )S e n s o r M o d e I DT e s t P a t t e r n O u t p u tB l a c k L e v e lH D R O u t p u tB r o a d c a s tD a t a R a t eS y n c h r o n i z i n g M a s t e rFSM-AR0144 FSM-AR0521 FSM-AR1335 FSM-HDP230 FSM-IMX264 FSM-IMX283 FSM-IMX290 FSM-IMX296 * FSM-IMX297 * FSM-IMX304 FSM-IMX327 FSM-IMX334 FSM-IMX335 FSM-IMX412 FSM-IMX415 FSM-IMX462 FSM-IMX477 FSM-IMX485 FSM-IMX530FSM-IMX577Table 2: Supported sensor features on NVIDIA Jetson TX2 / AGX Xavier2.1.2 Image Pre-Processing ExamplesThe provided image processing examples show the general mechanisms of data handling, for an image processing using 3rd -party IP. Both, the OpenCV and the LibArgus examples do not output data that is tuned for best visual experience.LibArgus Example:▪ Closed source ISP implementation ▪ Using hard ISP in NVIDIA SoC ▪ Most performant option▪ Example Implementation: Full but not tuned image pipeline, DisplayingColor tuning and lens correction needs to be calibrated for every image sensor separately and depends on sensor and lens attributes as well as illumination situation. Not ImplementedV4L (libsv)V4L (libsv) and libargus *Only supported in all pixel modeImage Pre-Processing Features per ModelB a d P i x e lC o r r e c t i o nN o i s e R e d u c t i o nB l a c k L e v e lC o m p .A u t o E x p o s u r e , G a i nA u t o W h i t eB a l a n c eD e m o s a i cC o l o r C o r r e c t i o nC o l o r A r t i f a c t S u p p r .D o w n s c a l i n gE d g e E n h a n c e m e n tFSM-AR0144 FSM-AR0521 FSM-AR1335 FSM-HDP230 FSM-IMX264 FSM-IMX283 FSM-IMX290 FSM-IMX296 FSM-IMX297 FSM-IMX304 FSM-IMX327 FSM-IMX334 FSM-IMX335 FSM-IMX412 FSM-IMX415 FSM-IMX477 FSM-IMX485 FSM-IMX530FSM-IMX577Table 3: Implemented LibArgus features for NVIDIA Jetson TX2 / AGX XavierDefault ConfigImage streaming is performed through the libargus pipeline, using a common configuration. It demonstrates the usage of libargus but is not optimized for the certain sensor configuration and might not lead to good image representation.Appropriate tuning can be applied on project basis for the individual sensor and lens combination.Not ImplementedImplementedUsing Default ConfigOpenCV Example:▪ Open software library▪ Easy to use and large feature set ▪ Extremely performance hungry (CPU) ▪ Not recommended for pre-processing▪ Example Implementation: Demosaicing, DisplayingImage Pre-Processing Features per ModelB a d P i x e lC o r r e c t i o nN o i s e R e d u c t i o nB l a c k L e v e lC o m p . A u t o E x p o s u r e , G a i nA u t o W h i t eB a l a n c eD e m o s a i cC o l o r C o r r e c t i o nC o l o r A r t i f a c t S u p p r .D o w n s c a l i n gE d g e E n h a n c e m e n tFSM-AR0144 FSM-AR0521 FSM-AR1335 FSM-HDP230 FSM-IMX264 FSM-IMX283 FSM-IMX290 FSM-IMX296 FSM-IMX297 FSM-IMX304 FSM-IMX327 FSM-IMX334 FSM-IMX335 FSM-IMX412 FSM-IMX415 FSM-IMX477 FSM-IMX485 FSM-IMX530FSM-IMX577Table 4: Implemented features in OpenCV exampleDue to limited performance and extreme resource utilization, it is not planned to enhance the image processing support on software side.Not ImplementedImplemented3Ecosystem Compatibility Matrix3.1Hardware SupportThe following matrix shows the compatibility of FSMs, FSAs and FPAs to each other. The FSAs differentiate to each other by supplied voltages, power up sequence, generated clock (oscillator) and physical attributes.Item FSM-IMX412FSM-IMX477FSM-IMX577FSM-IMX290FSM-IMX327FSM-IMX334FSM-IMX335FSM-IMX462FSM-IMX485FSM-IMX296FSM-IMX297FSM-AR0521FSM-AR1335 FSM-IMX415 FSM-IMX283 FSM-AR0144FSM-HDP230FSA-FT1/AFPA-4.A/TXA FPA-2.A/96B FPA-ABC/XX12FSA-FT3/AFPA-4.A/TXA FPA-2.A/96B FPA-ABC/XX12FSA-FT6/AFPA-4.A/TXA FPA-2.A/96B FPA-ABC/XX12FSA-FT7/AFPA-4.A/TXA FPA-2.A/96B FPA-ABC/XX12FSA-FT11/AFPA-4.A/TXA FPA-2.A/96B FPA-ABC/XX12FSA-FT12/AFPA-4.A/TXA FPA-2.A/96B FPA-ABC/XX12FSA-FT13/AFPA-4.A/TXA FPA-2.A/96B FPA-ABC/XX12FSA-FT19/AFPA-4.A/TXA FPA-2.A/96B FPA-ABC/XX122 Not verified, Xilinx Development Board with hard MIPI CSI-2 / D-PHY interface.FSM-IMX304M / FSM-IMX304CDatasheetVersion v1.0g from 2020-03-30© FRAMOS 2020, information is subject to change without prior notice .Item Data Output(FSA) FSM-IMX264 FSM-IMX304FSM-IMX421FSM-IMX530FSA-FT14/ A-00G MIPI CSI-2 FPA-4.A/TXA FPA-2.A/96B FPA-ABC/XX12FSA-FT14/BC Sub-LVDS FPA-ABC/XX1FSA-FT15/A-00G MIPI CSI-2 FPA-4.A/TXA FPA-2.A/96B FPA-ABC/XX12FSA-FT15/BC Sub-LVDS FPA-ABC/XX1FSA-FT18/A-00G MIPI CSI-2 FPA-4.A/TXA FPA-2.A/96B FPA-ABC/XX12 FSA-FT18/BC SLVS, SLVS-EC FPA-ABC/XX1FSA-FT20/BCSLVS, SLVS-ECFPA-ABC/XX1。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Linux启动(保护模式)
• startup_32 (arch/x86/kernel/head_32.S)
– 118-137: 载入boot_params – 146-231: 建立PDE (swapper_pg_dir )及内核页表 – 348-350: 设置寄存器cr3 (swapper_pg_dir ) – 351-353: 设置寄存器 的PG位,激活分页机制 置寄存器cr0的 位 – 366-477: 在保护模式下,根据CPU的不同进行 初始化,并将IDT和GDT载入寄存器 (440-441) – 619: 跳入i386_start_kernel
Linux启动(实模式)
• setup_gdt()
66static void setup_gdt(void) 67{ 70 static const u64 boot_gdt[] __attribute__((aligned(16))) = { 72 [GDT_ENTRY_BOOT_CS] = GDT_ENTRY(0xc09b, 0, 0xfffff), 74 [GDT_ENTRY_BOOT_DS] = GDT_ENTRY(0xc093, 0, 0xfffff), 78 [GDT_ENTRY_BOOT_TSS] = GDT_ENTRY(0x0089, 4096, 103), 79 }; 84 static struct gdt_ptr gdt; 85 86 gdt.len = sizeof(boot_gdt)-1; 87 gdt.ptr = (u32)&boot_gdt + (ds() << 4); 88 89 asm volatile("lgdtl %0" : : "m" (gdt)); 90}
பைடு நூலகம்
Linux启动(实模式)
• detect_memory()
arch/x86/boot/memory.c 122int detect_memory(void) 123{ 124 int err = -1; 125 126 if (detect_memory_e820() > 0) 127 err = 0; 128 129 if (!detect_memory_e801()) 130 err = 0; 131 132 if (!detect_memory_88()) 133 err = 0; 134 135 return err; 136}
• Linux启动程序(0x00090000)
– copy_boot_params(), console_init(), validate_cpu(), set_bios_mode(), detect_memory(), keyboard_set_repeat(), query_mca(), query_ist(), query_apm_bios(), query_edd(), set_video(), go_to_protected_mode()
系统启动时的内存管理
基于Linux 3.0 x86架构
目录
• Linux启动(实模式) • Linux启动(保护模式) • Start Kernel
Linux启动(实模式)
• BIOS (0xFFFFFFF0) • 启动引导(0x00007C00)
– arch/x86/boot/header.S – arch/x86/kernel/head_32.S
Linux启动(实模式)
• go_to_protected_mode()
1. 2. 3. 4. 5. 6. 7. realmode_switch_hook() enable_a20() reset_coprocessor() mask_all_interrupts() setup_idt() setup_gdt() protected_mode_jump(boot_params.hdr.code3 2_start, (u32)&boot_params + (ds() << 4))
Linux启动(实模式)
• protected_mode_jump(u32 entrypoint, u32 bootparams) (arch/x86/boot/pmjump.S)
39 movl %cr0, %edx 40 orb $X86_CR0_PE, %dl # Protected mode 41 movl %edx, %cr0 42 43 # Transition to 32-bit mode 44 .byte 0x66, 0xea # ljmpl opcode 452: .long in_pm32 # offset 46 .word __BOOT_CS # segment 47ENDPROC(protected_mode_jump) 48 51GLOBAL(in_pm32) 52 # Set up data segments for flat 32-bit mode 65 # Clear registers to allow for future extensions to the 76 jmpl *%eax # Jump to the 32-bit entrypoint 77ENDPROC(in_pm32)