基于单片机的CAN总线通讯实现
用87C196NT单片机实现CAN总线通信
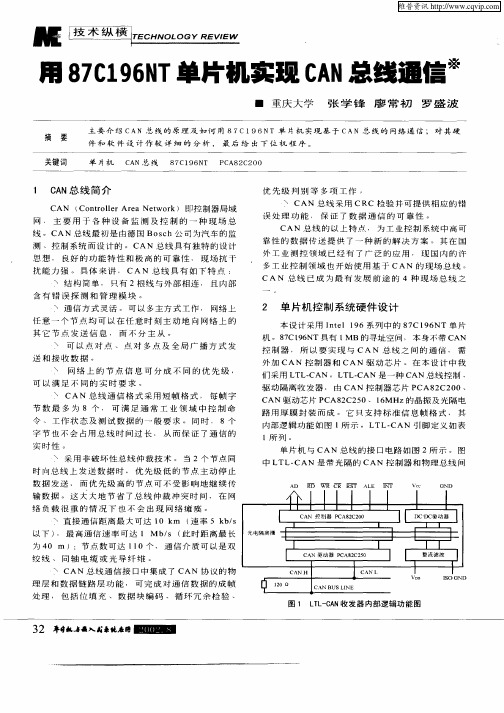
中 L L CAN 是 带 光 隔 的 CAN 控 制 器 和 物 理 总 线 间 T ・
AD R —D — R 丽 W 丽 AL E 丽 Vc c GND
络 负 载 很 重 的 情 况 下 也 不 会 出 现 网络 瘫痪 。 直接 通信 距离 最 大可达 l m ( 率 5 k / 0k 速 bs 以 下 ) 最 高 通 信 速 率 可 达 l b s ( 时 距 离 最 长 , M / 此 为 4 m ) 节 点 数 可 达 l 0个 , 通 信 介 质 可 以 是 双 0 l 绞 线 、 同 轴 电缆 或 光 导 纤 维 。 CAN 总 线 通 信 接 口 中 集 成 了 CAN 协 议 的 物 理 层 和 数 据 链路 层 功 能 , 可完 成 对 通 信 数 据 的 成帧
处 理 , 包 括 位 填 充 、数 据 块 编 码 、循 环 冗 余 检 验 、
图 1 L L C N收 发 器 内 部 逻 辑 功 能 图 T— A
3 丰 - 2 哼 ・入式冬 用_ 啊 健 田 圈
维普资讯
雌
表 1 L L C N引 脚 定 义 T -A
本 设 计 采 用 I tl 9 ne l 6系 列 中 的 8 Cl 6 7 9 NT单 片
机 。 8 C1 6 7 9 NT具 有 lMB的 寻 址 空 间 , 本 身 不带 CAN 控 制 器 , 所 以 要 实 现 与 CAN 总 线 之 间 的 通 信 , 需
外 加 CAN 控 制 器 和 CAN 驱 动 芯 片 。 在 本 设 计 中 我 们 采用 L LC T — AN 。L L C T . AN 是 一 种 C AN 总 线 控 制 、 驱 动 隔 离 收 发 器 , 由 CAN 控 制 器 芯 片 P CA8 C2 0、 2 0 C AN 驱 动 芯 片 P A8 C 5 C 2 2 0、 l MHz 晶振 及 光 隔 电 6 的 路 用 厚 膜 封 装 而 成 。 它 只 支 持 标 准 信 息 帧 格 式 , 其 内 部 逻 辑 功 能 如 图 l 示 。 L L CAN 引 脚 定 义 如 表 所 T .
STC15F2K60S2单片机与CAN总线接口的实现

CAN总线的接口主要包括电源电路、复位电路、时钟电路和STC15F2K60S2单片机与SJA1000接口电路、CAN总线收发器电路几部分。
2.1 CAN总线控制器SJA1000
SJA1000是NXP公司研制的一款独立CAN控制器,可以完成CAN总线标准中物理层和数据链路层的所有功能,在汽车制造和其他的工业领域得到了十分广泛的应用。SJA1000有BasicCAN 模式和PeliCAN模式两种不同的协议模式。BasicCAN模式是复位时默认模式,这种模式与早期产品PCA82C200兼容,只支持CAN 2.0A协议;PeliCAN模式是新增加的工作模式,支持CAN 2.0B协议的一些新特性。
PCA82C250的内部功能结构,主要包括基准电压、发送器、接收器、保护电路和工作模式控制电路等。
PCA82C250的工作模式:通过斜率电阻输入引脚(RS)的3种不同接法,可以设置PCA82C250的工作模式,如表1所示。
⑴高速模式。在高速工作模式下,发送器输出级晶体管将以尽可能快的速度打开和关闭,且不采用任何措施用于限制上升和下降的斜率。采用高速模式时,最好使用屏蔽电缆以避免射频干扰问题。通过把斜率电阻输入引脚(RS)接地选择高速模式。
3.2 发送子程序
发送子程序主要分为3个流程:⑴判断SJA1000当前的状态是否允许报文发送;⑵将要发送的数据按照CAN协议规定的帧格式组成数据帧,存入SJA1000的发送缓冲器;⑶写发送命令。发送子程序流程。发送前,一般检查3个状态位:一是接收状态,如果目前SJA1000正在接收报文,则不能发送,至少等本次接收完成后才能申请发送;二是检查发送完成状态,也即检查 SJA1000是否正在发送报文。如果正在发送,要等本次发送完成,才能启动新的发送任务;三是检查发送缓冲器是否被锁定,发送缓冲器处于不锁定状态,才能发送报文。
基于51单片机的CAN通讯协议C语言程序

// 入口函数 无
// 出口函数 无
// 全局变量 SJA_workmode
// 操作寄存器 控制寄存器(地址00)
// 函数功能 设置SJA工作在复位模式
#define SJA_RIE 0 //接收中断
//-----------------------定义地址指针,指向基址--------------------------------------------------------
bit bdata SJA_workmode=1; //SJA_workmode=1SJA工作在工作模式
//SJA_workmode=0工作在复位模式
#define base_Adr 0x00
//-----------------------定义总线定时寄存器的值--------------------------------------------------------
#define SJA_BTR0 0x00 //该值需要用户根据实际需要的波特率进行计算
//------------------------------------------------------------------------------------------------------
// 函数类别 SJA1000基本操作
// 函数名称 CANREG_write
}BASICCAN_FRAME,receive_BUF,send_BUF;
//BASICCAN_BUFstruct send_BUF;
//------------------------------------------------------------------------------------------------------
CAN总线通讯
基于单片机的CAN总线通讯实现摘要CAN总线是控制器局域网总线(Controller Area Network)的简称。
属于现场总线的范畴,是一种有效支持分布式控制或实时控制的串行通信网络。
CAN总线是一种多主方式的串行通讯总线,是国际上应用最广泛的现场总线之一,现已被应用到各个自动化控制系统中,从高速的网络到低价位的多路接线都可以使用CAN总线。
本文重点就基于单片机的CAN总线通信设计的实现进行介绍,通过CAN控制器以及CAN收发器把串口发送来的数据转换成CAN 通信的数据,然后又把数据转换成串口通信数据回发给计算机,实现数据的自发自收。
关键词:CAN总线;AT89S52;SJA1000;PCA82C250Abstract:CAN-bus,which is controller LAN-bus (contro1ler Area Network) for short.,belongs to the category of field bus, which is a kind of effective support distributed control or real-time control of serial communication network. CAN-bus is a main way more than the serial communication bus, which is one of the most widely used international field bus. It has been used in various automatic control system, from the network to the low price of multi-channel wiring CAN. This paper,which focuses on the CAN bus communication design, is based on the MCU to achieve . Through the CAN controller and CAN transceiver, the data is converted to the serial port to send the CAN communication data, and then put the data into the serial communications data back to the computer of spontaneous self-received.Key words:CAN- bus; AT89S52 devices; SJA1000; PCA82C250第一章前言1.1 概述控制器局域网(CAN-Controller Area Network)属于现场总线(Fieldbus)的范畴,是众多的属于现场总线标准之一,它适用于工业控制系统,具有通信速率高、可靠性强、连接方便、性能价格比高等诸多特点。
基于AT89C51单片机的CAN总线的多机通信

朗曙 撼
图报 送 电 理 2 发 件 原 文硬路图
度和反馈调节部分∞。用于显示温度的外部温度传感器采用数字 式温度传感器 D 1B 0 反馈调节部分主要 由两个发光二极管来 S82 。 实现 , 当温度在设置温度门限之外 , 相应的灯光代表实际中控制加 热装置或制冷装置。另外 , 采用 矩 阵键盘设置上下限温度值 , 不仅节省 I 口资源, / O 而且操作简便。根据系统原理 , 电路主要 由 图 3 报文接收硬件 电路原理 图 图 4 系统总体流程图 四大部分组成 : 智能 C N节点部分 、 A 输入控制部分 、 输出控制部分 超出适合水稻苗生长的温度范围或者低于此温度范围 ,要证 明所没计 和反馈控制部分。 如图 1 所示 , 输入输出和反馈模块统称为具体功能单 的电路是否符合实际要求 ,就必须人工设定两个门限温度值作为实际
・
2 0 0 ・
科 教 文 化
企业往往将生产经营的信息资料视为己有进行保密。这对于制造商来 3体育用品零售业供应链实现信息共享的途径 说, 如何协调链条上各节点之间的关系 , 尤其是和销售商之间的关 系, 3 加快对中小型专卖店 、 . 1 连锁店、 便利店和折扣店的整合 、 , 重组 建 尤为重要 , 此时信息共享的作用就凸显出来了。在现实实际过程 中, 立大型的、 各 多服务的体育零售店 , 实行直销和代销。有实力和影响力 的 利益相关群体因为利益和终极 目 的不统一 ,很难实现所谓的信息共 零售商要实行 自有品牌战略。首先, 标 零售商企业的经营者要有革新经营 享, 例如图 2 现实理想化模式 , . 各利益相关企业之间是关闭的环形 图, 观念 ~ 以“ 主动营销” 取代传统的“ 被动零售” ; 营销企业必须造就 其次, 信 息是为所有利益相关企业共享的。 为什么无法实现呢? 那因为现实实 和培养一批高素质的体育经营管理 ^ 因为此时的零售商不仅只销售 、 才, 践中存在诸多问题 。 商品, 还要负责做好产 品开发设计、 品牌管理 、 生产与质量检验 、 促销宣 2 体育用品零售业信息共享中存在的问题 . 3 传等一系列复杂的营销工作。 2 .我国零售业在 2 31 0世纪 9 0年代的发展可以说是 日 新月异, 主 3 针对不同地域 、 . 2 不同年龄、 不同职业、 不同爱好 的消费者 , 建立多 要表现在零售业态的发展, 即从过去单一的百货商场 、 小商店格局到现 样化的信息反馈渠道和信息流通渠道 , 例如网络 、 电视 、 报纸等多种媒 在的连锁超市 、 便利店 、 折扣店 、 专卖店等多种业态共存共荣 的发展格 介。 保证各利益相关群体 的信 息 共享的实现 , 建立快速反应的区域体育 局。零售业开始专业化后, 出现了各种专业化的零售店, 如体育用品专卖 用品零售商供应链。这建立在交易企业间“ 战略联盟 ” 的基础上 , 建立 店和综合 的体 育用品商场就是零售业专业化趋势的重要体现日然而’ “ 当的商 品、 当的时期 、 。 体 适 适 以适 当的价格 、 并在适 当的场所供给的系 育用品零售业的发展仍仅限于业态 、 店面的平面拓展, 没有进行产品的 统”1 5 1 。 立体纵深 发掘 , P 例如 B产品。 3 体育用品零售商供应链各利益相关企业之间要建立 战略合作 . 3 2 _巾国市场巨大 ,而且不同区域 ,不同空间结构信息是不一样 伙伴关系 , .2 3 在一定时期内的共享信 息、 共担风险 、 同获利 的协议关系。 共 的, 所以在大范围内实现信息共享是不现实的, 无法实现 决速反应供应 供应链上的各企业应构建 以“ 共享信息为荣 , 保守信息为耻 ” 的联盟文 链 和敏 捷化 供应链 。 化, 把整个联盟的利益放在第一位。同时联盟要尽量考虑成员的需要 , 2 .在零售业供应链巾, .3 3 供应商 、 制造商、 零售商和消费者, 彼此之 建立的第三方监督机构要在行为上保证公平 ,这样有利于成员之间的 最终使得信息共享成为一种义务 , 成为一种 间可以相互联系 , 组成各种各样的战略联盟 , 导致生产信息、 库存信息 、 相互谦让和避免恶 陛竞争 , 技术信息、对未来市场的预测信 息等视为某一利益相关企业已有进行 自觉日 。 3 . 4当今 中 国的市 场经 济正 处 于 转 型期 , 场 自身 的优 胜 劣 汰能 力 市 保密, 这样就阻碍了信息的快速流通和反馈。 以竞争和合作并存是零 所 并没正真正的发挥出来 , 因此首先要加强政府对市场 的宏观调控 , 建立 售业供应链战略联盟的重要特点。 个有序的市场 , 以使得人们对未来收益充满售 。另外 , 要逐步完善 2 . 4中国著名体育品牌企业安踏的成功启示 作为多年来保持高速增长、 在体育用品行业实现“ 中国制造 ” 升级 零售业供应链战略联盟信誉管理的法律、 法规。 结合我国现阶段的实际 为“ 1 叶同创造” 的典 代表, 对安踏而言 , 与中国奥委会签订 的合作合同 情况 , 逐步建立系统 的、 的信誉管理方面的法规体系 , 配套 依靠法律法 来保证信誉管理 的顺利实施 , 从而保证 注定是其品牌绽放 的重要历史时刻。作为 2 0 — 0 2年新周期中国奥 规的强制性规定和政策 的引导 , 09 21 。提高企业的 委会的合作伙伴, 安踏所涉权益覆盖之广、 年限之长 、 赞助金额之高, 在 零售业供应链战略联盟 中各个成员更好的实现信 息共享目 中国奥林 匹克运动史上都是空前的。 这是整个体育行业对安踏如今“ 信 息化水平 。 江 4 结论 湖地位”的肯定 ,也是安踏自身品牌和产品升级的体现。 ̄0 3 2 0 20- 05 2 1世纪的竞争将不再是企业与企业之间的竞争 , 而是供应链与供 年, 安踏完成了更为重要 的品牌转型。 在大多数 国内体育用品企业还在 为生产如何迎合每年那 3 个月的销售旺季发愁时, 安踏又领先一步 , 应链之间的竞争 。任何一个企业只有与上下游企业或竞争企业结成战 其 形成稳定的供应链 , 实现信息共享 , 并不断使供应链整体价值 产品系列首先在鞋 、 、 服 配上进行了细分和补充。2 0 0 7年 , 在其他皮拍 略联盟, 寻求如何进行鞋服配细分的时候 ,安踏已完成了各个专业运动装备市 增值 ,才有可能在竞争 中取胜。中国体育用 品市场在今后几年很有潜 我们要保护并开发 自己的品牌 , 搞好零售商的 自主创新 能力 , 多渠 场鞋服配产品系列的深度品牌细分 ,这是 引领真个体育用品也未来发 力, 展 的理念。安踏致力于为中国更多消费者精心设计和打造全方位 的专 道销售能力等。中国的体育用品零售环境正在走向成熟,正在逐步开
基于单片机的CAN总线通讯实现

CAN总线通信基于51单片机运用第一章媒介控制器局域网(CAN-Controller Area Network)属于现场总线(Fieldbus)的范畴,是浩瀚的属于现场总线尺度之一,它实用于工业控制体系,具有通信速度高.靠得住性强.衔接便利.机能价钱比高级诸多特色.它是一种有效支撑散布式控制或及时控制的串行通信收集,以其短报文帧及CSMA/CD-AMP (带有信息优先权及冲突检测的载波监听多路拜访)的MAC(序言拜访控制)方法而倍受工业主动化范畴中装备互连的厚爱.CAN的运用范围普遍从高速收集到低成本的多线路收集,它可以运用于汽车体系.机械.技巧装备和工业主动化里几乎任何类型的数据通信.跟着盘算机硬件.软件及集成电路技巧的敏捷成长,同时花费类电子产品.盘算机外设.汽车和工业运用等的需求不竭增长.高速.高靠得住和低成本的通信介质的请求也随之进步.现场总线是当今主动化范畴技巧成长的热门之一,它为散布式控制体系实现各节点之间及时.靠得住的数据通信供给了强有力的技巧支撑. 微处理器中经常运用的串行总线是通用异步吸收器传输总线(UART).串行通信接口(SCI).同步外设接口(SPI).内部集成电路(I2C)和通用串行总线(USB),以及车用串行总线,包含控制器区域网(CAN)和当地互连网(LIN)等.这些总线在速度.物理接口要乞降通信办法学上都有所不合.在盘算机数据传输范畴内,长期以来运用的通信尺度,尽管被普遍运用,但是无法在须要运用大量的传感器和控制器的庞杂或大范围的情形中运用.控制器局部网CAN(CONTROLLER AERANETW0RK)就是为顺应这种须要而成长起来的.跟着汽车电子技巧的成长,花费者对于汽车功效的请求越来越多,汽车上所用的电控单元不竭增多,电控单元之间信息交流的需求,使得电子装配之间的通信越来越庞杂,同时意味着须要更多的衔接旌旗灯号线,这就促进了车用总线技巧的成长.CAN 总线的消失,就是为了削减不竭增长的旌旗灯号线,所有的外围器件都可以被衔接到总线上因为CAN总线具有靠得住性高.及时性好.成本合理等长处,逐渐被运用于如船舶.航天.工业测控.主动化.电力体系.楼宇监控等其他范畴中.1.2 CAN总线的特色80年月末,在汽车工业中,因为浩瀚的控制装备与测试仪器之间须要进行大量数据交流,传统的总线无法知足需求,德国BOSCH公司提出了CAN 总线,这种新的串行数据通信协定.CAN总线即控制器局域网总线,通信接口中集成了CAN 协定的物理层和数据链路层功效,可完成对通信数据的成帧处理,包含位填充.数据块编码.轮回冗余磨练.优先级判别等项工作.CAN (Controller Area Network)属于现场总线的一种,在传统的工业控制范畴中,大部分的通信采取RS232.RS485或RS422总线.比拟之下,RS232.RS485或RS422总线有着通信距离近,通信速度慢,抗干扰机能差等缺陷.通信一般采取主从方法,经由过程主站查询方法进行通信,及时性.靠得住性较差.当体系有错误,多节点同时向总线发送数据时,导致总线呈现短路,从而破坏某些节点.基于CAN 总线的散布式控制体系在许多方面具有明显的优胜性.L而CAN 的电路构造简略,请求的线数较少,只须要两根线与外部器件互联,使得各控制单元可以或许经由过程CAN总线共享所有的信息和资本.达到简化布线.削减传感器数目.防止控制功效反复的后果.CAN 具有的完美的通信协定,并且可以经由过程CAN 控制器芯片及其接口芯片来实现,从而大大降低体系开起事度,缩短了开辟周期.CAN支撑散布式控制或及时控制,工作于多主方法,收集上各个节点均可以在任一时刻主动发送信息,可以点对点,点对多点以及全局广播方法收发数据.收分散的各节点都可依据总线拜访优先权,采取非破坏性总线总裁技巧,通信速度快,靠得住性高,可大大节俭了总线仲裁冲突时光,在收集负载很重的情形下也不会消失收集瘫痪.CAN没有采取站地址编码,而是对通信数据进行编码,这可使不合的节点同时吸收到数据,这使得CAN 总线的数据通信及时性强,并且轻易构成冗余构造,进步体系的靠得住性和体系的灵活性.它具有如下特色:1)CAN 是到今朝为止为数不久不多的有国际尺度的现场总线,总线协定已被国际尺度化组织认证,技巧比较成熟,控制的芯片已经商品化,性价比高,特别实用于散布式测控体系之间的数通信.2)CAN总线没有采纳传统的站地址编码,不合错误节点进行地址划定,而是把通信数据块进行编码.这种办法的长处可使收集内的节点个数在理论上不受限制,数据块的标识码可由1l位或29位二进制数构成.这种按数据块编码的方法,运用报文的标识符来指定报文的优先级以及报文的内容,高优先级的节点享有传送报文的优先权.还可使不合的节点同时吸收到雷同的数据,这一点在散布式控制体系中异常有效.采取短帧构造,每一帧的有效字节数为8个,数据传输时光短,受干扰的概率低,从新发送的时光短,从而包管了通信的及时性.3)CAN 总线采取了多主竞争式总线构造,通信介质可所以双绞线.同轴电缆或光导纤维,可以多个主站运行并且疏散仲裁.CAN总线上随便率性节点可以点对点,一对多及广播分散方法传送和接收数据,并且可以随便率性时刻主动地向收集上其它节点发送信息而不分主次,是以可在各节点之间实现自由通信.CAN 通信距离最大是1O公里(设速度为5Kbps),最大通信速度为1Mbit /s(设通信距离为4O米).4)CAN 采取非破坏性的总线仲裁技巧,即载波侦听多路拜访/冲突检测(CSMA/CD)的总线仲裁方法,当多个节点同时发送数据时,优先级低的节点会主动停滞发送,高优先级的节点可中断传输,节俭总线仲裁时光.防止多个节点同时开端发送新闻而造成总线冲突,包管优先级高的报文可以或许优先发送.5)CAN总线协定采取了完美的错误检测与错误处理机制,包含了CRC校验.错误报文主动重发.错误状况断定.暂时错误主动恢复等措施,从而很好的包管了数据通信的靠得住性.节点在错误轻微的情形下,具有主动关黔6)闭总线的功效,割断它与总线的接洽,以使总线上其他操纵不受影响.CAN 总线采取双线串行通信方法,检错才能强,可在高噪声干扰情形中工作.具有及时性强.传输距离较远.抗电磁干扰才能强.成本低等长处.可依据报文的ID 决议吸收或屏障该报文.靠得住的错误处理和检错机制,发送的信息遭到破坏后,可主动重发,报文不包含源地址或目标地址,仅用标记符来指导功效信息.优先级信息.CAN卓著的特点.极高的靠得住性和奇特的设计,特别合适工业进程监控装备的通信,是以,越来越受到工业界的看重,并已公以为最有前程的现场总线之一.CAN总线经由过程CAN 控制器接口芯片的输出端CANH和CANL与物理总线相连,而CANH端的状况只能是高电平或悬浮状况,CANL端只能是低电平或悬浮状况.CAN 总线的旌旗灯号状况为2种,隐位与显位.当隐位与显位发送消失竞争时,最终成果是显位.在处理冲突时,因为该旌旗灯号的二值且“单稳态”的特点变得简略,报错帧可以使所有节点很轻易地取得一致性的数据,并且包管了节点状况的同步,这种二值特点对CAN 总线的靠得住性有很大包管.并且CAN 节点在消失轻微错误的情形下,可以主动封闭输出,防止总线上其他节点的操纵受影响,从而包管不会因个体节点消失问题,而使得总线处于”逝世锁”状况.CAN 总线具有位填充.回读.错误束缚.出错主动重发等长处,同时通信速度高.通信距离远.轻易实现.且性价比高.1.3 CAN总线的成长远景CAN 最初是用于汽车行业的监测.控制,用来解决汽车内部的庞杂硬件旌旗灯号接线的低成本通信总线,现今CAN总线已经被公以为一种靠得住的收集总线在汽车上得以运用.CAN总线共享信息和资本,总线的数据通信进步了体系靠得住性.及时性.灵活性.可保护性,更好地匹配和调和各个控制体系.跟着汽车电子技巧的成长具有高度灵活性.简略的扩大性.优秀的抗干扰性和处理错误才能的CAN 总线,越来越受到人们的看重,它在汽车范畴上得到了普遍的运用.世界上一些有名的汽车制作厂商,都采取了CAN总线来实现汽车内部控制体系与各检测和履行机构间的数据通信.近年来CAN 总线已成长成为汽车电子体系的主流总线,已形成国际尺度的现场总线,并由ISO正式颁布了IS011898CAN 高速运用尺度和ISO11519CAN 低速运用尺度,这为CAN 总线的尺度化.规范化摊平了道路.CAN 总线以其高机能,高靠得住性及奇特的设计,在现代散布式测量与控制技巧范畴中的运用已愈来愈普遍.同时因为CAN 总线自身的特色,其运用范围今朝已不再局限于汽车行业,而是转向铁路.交通.主动控制.航空航天.帆海.机械工业.机械人.医疗器械及安防等范畴成长.CAN总线的成长已经颇具范围,它不但在汽车范畴的运用占领必定优势,在其他工业范畴内也占领一席之地.这要归根于通信技巧的不竭进步,对通信本身的请求不竭进步,这种形势下CAN 总线的优势在于其优胜的抗干扰才能和性价比.尽管CAN总线有必定局限,甚至还有破绽,但对CAN 总线的改良还在中断,信任在将来的成长中,CAN 总线经由过程不竭的更新和改良,可以或许取得更大的进步.第2章体系计划总体设计2.1 体系道理当CAN总线上的一个节点(站)发送数据时,它以报文情势广播给收分散所有节点.对每个节点来说,无论数据是否是发给本身的,都对其进行吸收.每组报文开首的11位字符为标识符,界说了报文的优先级,这种报文格局称为面向内容的编址计划.在同一体系中标识符是独一的,不成能有两个站发送具有雷同标识符的报文.当几个站同时竞争总线读取时,这种设置装备摆设十分重要CAN总线的报文发送和吸收.当一个站要向其它站发送数据时,该站的CPU将要发送的数据和本身的标识符传送给本站的CAN芯片,并处于预备状况;当它收到总线分派时, 转为发送报文状况.CAN芯片将数据依据协定组织成必定的报文格局发出,这时网上的其它站处于吸收状况.每个处于吸收状况的站对吸收到的报文进行检测,断定这些报文是否是发给本身的,以肯定是否吸收它.因为CAN总线是一种面向内容的编址计划,是以很轻易树立高水准的控制体系并灵活地进行设置装备摆设.我们可以很轻易地在CAN总线中加进一些新站而无需在硬件或软件长进行修正.当所供给的新站是纯数据吸收装备时,数据传输协定不请求自力的部分有物理目标地址.它许可散布进程同步化,即总线上控制器须要测量数据时,可由网上获得,而无须每个控制器都有本身自力的传感器. 2.2 体系总体设计方框图图2-1 体系总体设计方框图2.2.1 51单片机体系的控制芯片采取AT89S52单片机来控制,因为AT89S52运用比较普遍,并且成本低,操纵控制简略,功耗较低,运行靠得住性强.体系本身对处理器处理速度的请求不是很高,所以选择该款单片机.AT89S52是一种低功耗.高机能CMOS8位微控制器,具有8K 在体系可编程Flash 存储器.运用Atmel 公司高密度非易掉性存储器技巧制作,与工业80C51 产品指令和引脚完全兼容.片上Flash许可程序存储器在体系可编程,亦适于通例编程器.在单芯片上,失去灵活的8 位CPU 和在体系可编程Flash,使得AT89S52为浩瀚嵌入式控制运用体系供给高灵活.超有效的解决计划.AT89S52具有以下尺度功效: 8k字节Flash,256字节RAM,32 位I/O 口线,看门狗准时器,2 个数据指针,三个16 位准时器/计数器,一个6向量2级中断构造,全双工串行口,片内晶振及时钟电路.别的,AT89S52 可降至0Hz 静态逻辑操纵,支撑2种软件可选择节电模式.余暇模式下,CPU停滞工作,许可RAM.准时器/计数器.串口.中断中断工作.掉落电呵护方法下,RAM内容被保管,振荡器被冻结,单片机一切工作停滞,直到下一个中断或硬件复位为止.图2-2 AT89S52引脚构造图2-3 AT89S52内部构造图➢VCC : 电源➢GND: 地➢P0 口:P0口是一个8位漏极开路的双向I/O口.作为输出口,每位能驱动8个TTL逻辑电平.对P0端口写“1”时,引脚用作高阻抗输入.当拜访外部程序和数据存储器时,P0口也被作为低8位地址/数据复用.在这种模式下,P0具有内部上拉电阻.在flash编程时,P0口也用来吸收指令字节;在程序校验时,输出指令字节.程序校验时,须要外部上拉电阻.➢P1 口:P1 口是一个具有内部上拉电阻的8 位双向I/O 口,p1 输出缓冲器能驱动4 个TTL 逻辑电平.对P1 端口写“1”时,内部上拉电阻把端口拉高,此时可以作为输进口运用.作为输入运用时,被外部拉低的引脚因为内部电阻的原因,将输出电流(IIL).此外,P1.0和P1.2分离作准时器/计数器2的外部计数输入(P1.0/T2)和时器/计数器2的触发输入(P1.1/T2EX),具体如下表所示.在flash编程和校验时,P1口吸收低8位地址字节.表2-1 P1口引脚功效➢P2 口:P2 口是一个具有内部上拉电阻的8 位双向I/O 口,P2 输出缓冲器能驱动4 个TTL 逻辑电平.对P2 端口写“1”时,内部上拉电阻把端口拉高,此时可以作为输进口运用.作为输入运用时,被外部拉低的引脚因为内部电阻的原因,将输出电流(IIL).在拜访外部程序存储器或用16位地址读取外部数据存储器(例如履行MOVX @DPTR)时,P2 口送出高八位地址.在这种运用中,P2 口运用很强的内部上拉发送1.在运用8位地址(如MOVX @RI)拜访外部数据存储器时,P2口输出P2锁存器的内容.在flash编程和校验时,P2口也吸收高8位地址字节和一些控制旌旗灯号.➢P3 口:P3 口是一个具有内部上拉电阻的8 位双向I/O 口,p2 输出缓冲器能驱动4 个TTL 逻辑电平.对P3 端口写“1”时,内部上拉电阻把端口拉高,此时可以作为输进口运用.作为输入运用时,被外部拉低的引脚因为内部电阻的原因,将输出电流(IIL).P3口亦作为AT89S52特别功效(第二功效)运用,如下表所示.在flash编程和校验时,P3口也吸收一些控制旌旗灯号.表2-2 P3口引脚功效➢RS: 复位输入.晶振工作时,RST脚中断2 个机械周期高电平将使单片机复位.看门狗计时完成后,RST 脚输出96 个晶振周期的高电平.特别存放器AUXR(地址8EH)上的DISRTO位可以使此功效无效.DISRTO默认状况下,复位高电平有效.➢ALE/PROG:地址锁存控制旌旗灯号(ALE)是拜访外部程序存储器时,锁存低8 位地址的输出脉冲.在flash编程时,此引脚(PROG)也用作编程输入脉冲.在一般情形下,ALE 以晶振六分之一的固定频率输出脉冲,可用来作为外部准时器或时钟运用.然而,特别强调,在每次拜访外部数据存储器时,ALE 脉冲将会跳过.假如须要,经由过程将地址为8EH的SFR的第0地位“1”,ALE操纵将无效.这一地位“1”,ALE 仅在履行MOVX 或MOVC指令时有效.不然,ALE 将被微弱拉高.这个ALE 使能标记位(地址为8EH的SFR 的第0位)的设置对微控制器处于外部履行模式下无效.➢PSEN:外部程序存储器选通旌旗灯号(PSEN)是外部程序存储器选通旌旗灯号.当AT89S52从外部程序存储器履行外部代码时,PSEN在每个机械周期被激活两次,而在拜访外部数据存储器时,PSEN将不被激活.EA/VPP:拜访外部程序存储器控制旌旗灯号.为使能从0000H 到FFFFH的外部程序存储器读取指令,EA必须接GND.为了履行内部程序指令,EA应当接VCC.在flash编程时代,EA也吸收12伏VPP电压.➢XTAL1:振荡器反相放大器和内部时钟产生电路的输入端.➢XTAL2:振荡器反相放大器的输出2.2.2 CAN总线收发器PCA82C250 是CAN 协定控制器和物理总线的接口这个器件对总线供给不合的发送才能和对CAN控制器供给不合的吸收才能.图2-4 82C250引脚构造 表2-3 82C250引脚管脚功效描写图2-5 82C250方框图功效描写:PCA82C50 是CAN 协定控制器和物理总线的接口,它重要用于汽车里的高速运用(高达1Mbaud).这个器件对总线供给不合的发送才能和对CAN 控制器供给不合的吸收才能完全和ISO11898尺度兼容.限制的电流值呵护吸收器输出级,防止阳极和阴极的短路,尽管在默认的前提下功率消费是增长的这个特点值将防止发送器输出级的破坏.假如节点温度超出大约160摄氏度,发送器限制的电流值输出被降低因为发送器占去大部分的功率消费,这将导致降额功耗和较低的片内温度,IC 中的其它部分在运用中将保持不变,当总线短路的时刻热呵护异常须要.这个CANH CANL 线也被呵护防止主动运作进程中电流的瞬变.表2-4 CAN 收发器真值表标识表记标帜 管脚功效描写TXD 1 1 发送数据输入GND 2 2 接地 VCC 3 3 供给电压 RXD 4 4 吸收数据输出 Vref 5 5 参考电压输出 CANL 6 6 低电平CAN 电压输入/输出 CANH 7 7 高电平CAN 电压输入输出 RS88 Slope 电阻输入留意:X=随便值表2-5 管脚 RS真值表管脚8 RS 有三种不合的工作模式可被选择: 高速,备用,斜率控制.对于高速工作模式,发送器输出级晶体管被尽可能地快启动和封闭,在这种模式下,没有措施用于限制上升和降低的斜度.建议运用屏障电缆可防止RFI 这种问题.经由过程把管脚8接地选择这个模式.对于低速或较短的总线长度,可运用一种没有屏障的双绞线或平行线.对于降低 RFI,上升和降低的斜率是个限制值,上升和降低的斜率可以或许被编程,经由过程从管脚8 接一个电阻至地,这个斜率和管脚8 的电流输出成比例.假如高电平被接至管脚8 ,电路进入低电流呵护模式.在这种模式下,发送器被封闭,吸收器开至低电流.假如控制位被检测(不合的总线电压<0.9V), RXD 将被开至低电平.这个微型控制器应对这个前提有所反响,经由过程转换收发器至正常工作状况.(经由管脚8)因为这个吸收器在备用模式下比较慢,第一条信息会丧掉掉落.2.2.3 CAN总线控制器CAN总线控制器选用SJA1000,SJAl000是一个自力的控制器,有两种不合的模式.(1)BasicCAN模式:体系上电后默认的模式,与PCA82C200兼容.(2)PeliCAN模式:支撑CAN2.0B协定划定的所有功效.图2-6 SJA1000引脚构造SJAl000功效模块重要有:接口治理逻辑.吸收FIFO队列.吸收滤波器.发送缓冲器和CAN焦点模块.CAN焦点模块基于CAN2.0B的协定履行对CAN帧的发送和吸收.逻辑治理接话柄现与外部单片机的衔接.SJAlO00的发送缓冲器可以存储一个完全的报文,当单片机开端一个传送时,逻辑治理接口会使CAN焦点模块读发送缓冲器的数据,按照CAN2.OB协定发送数据.当收到一个报文时,cAN焦点控制模块将中断的位转换为尺度的数据存放于吸收过滤器中,经由过程验收码存放器.验收屏障存放器进行过滤处理,将相符标记位请求的数据放人吸收FIF0队列中以下为SJA1000芯片的特色:◆管脚及电气特点与自力CAN总线控制器PCA82C200兼容;◆软件与PCA82C200兼容(缺省为根本CAN模式);◆扩大吸收缓冲器(64字节FIFO);◆支撑协定;◆同时支撑11位和29位标识符;◆位通信速度为1Mbits/s;◆加强CAN模式(PeliCAN);◆采取24MHz时钟频率;◆支撑多种微处理器接口;◆可编程CAN输出驱动设置装备摆设;工作温度范围为-40~+125℃.图2-7 SJA1000内部构造图从芯片的构造图中可以看出,SJA1000型自力CAN总线控制器由以下几部分构成:(1)接口治理逻辑:它吸收来自微处理器的敕令,控制CAN存放器的地址,并为微处理器供给中断和状况信息.(2)发送缓冲器:有13字节长.它位于CPU和位流处理器(BSP)之间,能存储一条将在CAN总线上发送的完全的报文,报文由CPU写入,由SBP读出.(3)吸收缓冲器(RXB.RXFIFO):它是CPU和吸收滤波器之间的接口,用来存储从CAN总线吸收并经由过程了滤波的报文.吸收缓冲器RXB是供给应CPU可拜访的13字节的窗口,这个窗口是属于吸收FIFO(RXFIFO)的一部分,共由64字节长.有了这个FIFO,可以在CPU处理一个报文的同时中断吸收其他到来的报文.(4)吸收滤波器:它把报文头中的标识符和吸收滤波存放器中的内容进行比较,以断定文报文是否被吸收.假如被吸收,报文存入RXFIFO.(5)位流处理器:它是一个控制发送缓冲器.RXFIFO并行数据和CAN总线(串行数据)之间数据的序列产生器,同时它也履行错误检测.仲裁.位填充和CAN总线错误处理功效.(6)位准时逻辑不:它将SJA1000同步于CAN总线上的位流.(7)错误治理逻辑:它按照CAN协定完成错误界定.2.2.4 光耦合器6N137光耦合器是一款用于单通道的高速光耦合器,其内部有一个850 nm 波长AlGaAs LED 和一个集成检测器构成,其检测器由一个光敏二极管.高增益线性运放及一个肖特基钳位的集电极开路的三极管构成.具有温度.电流和电压抵偿功效,高的输入输出隔离,LSTTL/TTL 兼容,高速(典范为10MBd),5mA的微小输入电流.图2-8 6N137引脚构造特点:①转换速度高达10MBit/s;②摆率高达10kV/us;③扇出系数为8;④逻辑电平输出;⑤集电极开路输出;工作参数:最大输入电流,低电平:250uA 最大输入电流,高电平:15mA 最大许可低电平电压(输出高):0.8v 最大许可高电平电压:VCC 最大电源电压.输出:5.5V 扇出(TTL 负载):8个(最多) 工作温度范围:-40°C t o+85°C 典范运用:高速数字开关,马达控制体系和A/D 转换等.旌旗灯号从脚2 和脚3 输入,发光二极管发光,经片内光通道传到光敏二极管,反向偏置的光敏管光照后导通,经电流-电压转换后送到与门的一个输入端,与门的另一个输入为使能端,当使能端为高时与门输出高电平,经输出三极管反向后光电隔离器输出低电平.当输入旌旗灯号电流小于触发阈值或使能端为低时,输出高电平,但这个逻辑高是集电极开路的,可针对吸收电路加上拉电阻或电压调剂电路.道理如上图所示,若以脚2 为输入,脚3 接地,则真值表如附表所列,这相当于非门的传输,若愿望在传输进程中不转变逻辑状况,则从脚 3 输入,脚 2 接高电平.)表2-7 真值表图2-9 测试电路和波形第3章体系硬件设计3.1体系硬件的根本构成部分该体系的硬件重要包含这几个部分:处理器.CAN总线控制器.CAN总线收发器.构造电路如下:图3-1 体系硬件构造电路3.2 单片机电路设计本设计选择AT89S52单片机.AT89S52自带有片内ROM和必定命量的RAM,一般不须要扩大片外的存储器,并且能和MCS—51产品兼容.本设计选用简略根本的经典复位电路,它运用电容和电阻的充放电来产生一个达到时光请求的中断低电压,并输入到单片机的复位管脚,如下图所示:图3-2 单片机构造电路3.3 CAN总线控制器电路设计SJA1000被设计为周全支撑CAN 2.0B协定,并且支撑多处理器接口,其接口电路十分简略,如下图所示:其电路图如下:。
CAN总线接口在单片机网络通信中的实现方法
CAN总线接口在单片机网络通信中的实现方法CAN(Controller Area Network)总线是一种广泛应用于汽车、工业控制和机器人等领域的串行通信协议。
它在单片机网络通信中具有重要的作用,可以实现高效可靠的数据传输。
本文将介绍CAN总线接口在单片机网络通信中的实现方法。
一、CAN总线的基本原理CAN总线是一种多主机、多从机的总线系统,其基本原理是基于广播方式进行通信。
CAN总线上的每个节点都可以发送和接收数据,它们通过共享线路传递信息。
在CAN总线中,每个节点都有一个唯一的标识符。
当某个节点发送一帧数据时,其他节点会接收到该帧数据并进行处理。
这种广播方式可以实现节点之间的高效通信。
二、CAN总线接口的硬件实现为了在单片机网络通信中实现CAN总线接口,我们需要使用一种具备CAN功能的单片机芯片,并连接相应的硬件电路。
1. CAN控制器:CAN控制器是实现CAN总线通信的核心部件,它负责发送和接收数据,并进行错误检测和纠正。
CAN控制器通常集成在专门的CAN芯片中,也可以作为单片机的一部分。
2. CAN收发器:CAN收发器是将CAN控制器产生的数字信号转换为物理信号,以便在CAN总线上进行传输。
它可以将接收到的差分信号转换为单端信号,并将发送的单端信号转换为差分信号。
3. 终端电阻:CAN总线上的终端电阻用于抵消传输线上的反射信号,并确保正确的信号传输。
终端电阻一般放置在CAN总线的两端。
4. 过滤器电路:过滤器电路用于过滤掉不需要的数据帧,只接收需要的数据帧。
它可以根据CAN帧的标识符进行过滤,提高系统的响应速度。
三、CAN总线接口的软件实现在硬件电路连接完成后,我们还需要编写相应的软件程序来实现CAN总线接口的效果。
1. 硬件驱动:首先,我们需要编写硬件驱动程序,通过设置单片机的寄存器配置CAN控制器和收发器。
这些寄存器包括CAN控制寄存器、接收缓冲区寄存器和发送数据寄存器等。
2. 初始化配置:在使用CAN总线前,我们需要进行初始化配置,包括设置波特率、模式选择、过滤器设置等。
基于单片机的CAN总线通讯实现

基于单片机的CAN总线通讯实现CAN(Controller Area Network)总线是一种现代的串行通信总线,广泛应用于汽车电子系统和工控领域。
它具有高可靠性、抗干扰能力强、高速传输、多节点连接等特点,成为实时控制系统的首选通信方式。
实现基于单片机的CAN总线通讯,需要经过以下几个步骤:1.硬件准备:选择合适的CAN控制器和单片机,常用的CAN控制器有MCP2515、SJA1000等。
接下来需要连接CAN控制器和单片机,包括连接CAN高低线路、配置引脚等。
2.引脚配置:根据所使用的单片机和CAN控制器的规格,配置相应的引脚。
通常需要配置CAN_TX、CAN_RX引脚,同时还需要配置中断引脚。
3. 初始化CAN总线:初始化CAN总线的过程包括设置波特率、模式选择、滤波器设置等。
波特率是通信的重要参数,需要保证发送和接收端的波特率一致,通常使用比较常见的波特率如500kbps。
4.发送数据:CAN总线通信是基于消息的,发送数据需要构建CAN消息帧。
消息帧包括标识符、数据长度、数据内容等。
在发送数据之前,需要准备好发送的数据,并将数据放入CAN消息帧中,最后将消息帧发送到总线上。
5.接收数据:接收数据需要配置CAN总线的工作模式和接收过滤器。
当有数据从总线上接收时,CAN控制器将数据存入接收缓冲器,并产生中断或者置位标志位来提醒主控处理接收到的数据。
6.数据处理:接收到的数据可以根据需要进行处理,包括解析、判断、存储等。
根据数据的标识符和长度等信息,可以将数据分发给不同的处理程序进行处理。
7.错误处理:在CAN总线通信过程中,可能会出现数据错误、通信超时等问题。
需要设置相应的错误处理机制,包括错误标志位的监测、错误计数器的清零等。
8.电源管理:在使用CAN总线通信时,需要合理管理系统的功耗和电源。
对于低功耗应用,可以将CAN控制器和单片机配置为睡眠模式,待接收到唤醒信号后再恢复正常工作。
总结:基于单片机的CAN总线通讯实现需要进行硬件准备、引脚配置、初始化CAN总线、发送数据、接收数据、数据处理、错误处理和电源管理等一系列步骤。
基于单片机的CAN总线系统设计
当 节 点 有 数据 输 入 , 制 器 产 生 中 断 请 求 标 记 , 中 断 服 控 在 务 程 序 内 对 完 成 对 数 据 的 接 收 , C N 口收 到 的数 据根 据 不 将 A
p r c n r l h p ot o to i . c
Ke r s AN o y wo d :C c mmu ia in C n c t ; AN u ;MCU; AN y c r n z t n o bs C S n h ia i o o
1引言
C N 技 术 是 国际 上 应 用最 广泛 的现 场 总线 之 一 , 一 种 A 是 实 时 控 制 的 串行 通 信 网络 。C N 通 信 具 有 十 分 优 越 的 特 点 : A
C N接 口控 制 器 sA 0 0初 始 配 置 ,在 数 据 处 理 阶 段 将 待 发 A J 10
送 数 据 写 入 s A10 , 过 C N总 线 发 送 , 用 中 断 方 式 接 收 J 00通 A 采 C N数 据然 后进 行处 理 。 A C N 报 文 传 输 包 含 4种 不 同 类 型 的 帧 :数 据 帧 ( a A Dt a
成 本 、 高 的 总 线 利 用 率 、 远 的 数 据 传 输 距 离 ( O m) 高 速 极 很 1k 、
率 (Mb s、 可 靠 性 、 接 方 便 。这 些 优 点使 得 CA 通 信 越 1 p)高 连 N
来 越 得 到 广 泛 通 信 领 域 的认 同 。在 底 层 现 场 级 传 输 中 被 广 泛
以及 串行收发 器构成 的多点通信 网络 , 介绍 了通信节点的硬件 电路设计和软件处理 流程 , 细阐述 了 C N帧结构 、 详 A 数据 流的收 发 问题 , 并针对 C N总线 网络的 同步方式以及 C N接 口控制器进行 了分析 。 A A
基于单片机的智能传感器CAN总线接口硬件设计

基于单片机的智能传感器CAN总线接口硬件设计随着智能化技术的不断发展,人们越来越关注智能系统的搭建,传感器技术的应用也越来越广泛,单片机技术更是在这个背景下广受关注。
在实现智能传感器的联网和信息处理方面,CAN总线作为一种主要网络协议,已经被广泛应用。
在这种情况下,智能传感器必须具有相应的CAN总线接口设计。
本文将介绍基于单片机的智能传感器CAN总线接口硬件设计。
1、 CAN总线介绍CAN(Controller Area Network)总线是一种串行通信协议,主要用于多个控制节点之间的实时数据传输。
CAN总线的通讯速度高,误码率低,具有自适应性等特点。
CAN总线的应用包括工业控制系统、汽车电子控制系统等。
2、硬件设计原理基于单片机的智能传感器CAN总线接口硬件设计需要根据自己的实际需求进行选择。
以STM32单片机为例,STM32单片机的CAN总线接口包括CAN1和CAN2,这两个接口在硬件电路上都有Rx和Tx引脚和节点电阻。
3、硬件设计流程(1)选择STM32单片机在选取单片机的时候,需要根据实际应用场景来选择。
STM32单片机有许多系列,每个系列又有不同的型号,不同型号的单片机内置了不同的外设,需要根据实际需求进行选择。
同时,要根据芯片性价比、性能、功耗等因素进行考虑。
(2)CAN总线选择在硬件设计中,需要选择CAN总线芯片,这个芯片需要支持CAN2.0A和CAN2.0B协议,并且需要支持高速通讯。
同时,要注意芯片的封装和额定工作温度等特性。
(3) CAN总线硬件连接在硬件连接中,需要将CAN总线芯片的Rx和Tx引脚和单片机的CAN1或CAN2接口相连,同时还需添加适当的电流限制电阻和终端电阻。
(4) CAN总线软件调试最后,需要对硬件电路进行软件调试,包括使用标准的CAN总线协议进行通信、CAN总线的数据传输、接收和发送数据、调试CAN中断等。
4、总结基于单片机的智能传感器CAN总线接口硬件设计需要根据实际需求进行选择,在硬件设计中需要选择合适的单片机、CAN总线芯片,并进行正确的硬件连接。
基于51单片机的CAN总线系统设计

基于51单片机的CAN总线系统设计0 引言随着20世纪80年代初期德国Bosch公司提出CAN(Controller Area Network)总线,即控制器局域网方案以解决汽车控制装置问的通信问题。
经过20多年的发展,CAN总线现在广泛的应用在汽车领域,在汽车控制系统中应用CAN总线可以使硬件方案的软件化实现,大大地简化了设计,减小了硬件成本和设计生产成本,数据共享减少了数据的重复处理,节省了成本,可以将信号线减到最少,减少布线,使成本进一步降低等优点。
由于CAN总线通信的高性能、高可靠性、及独特的设计和适宜的价格可以广泛应用于工业现场控制、智能楼宇、医疗器械、交通工具以及传感器等领域,所以被公认为是几种最有前途的现场总线之一。
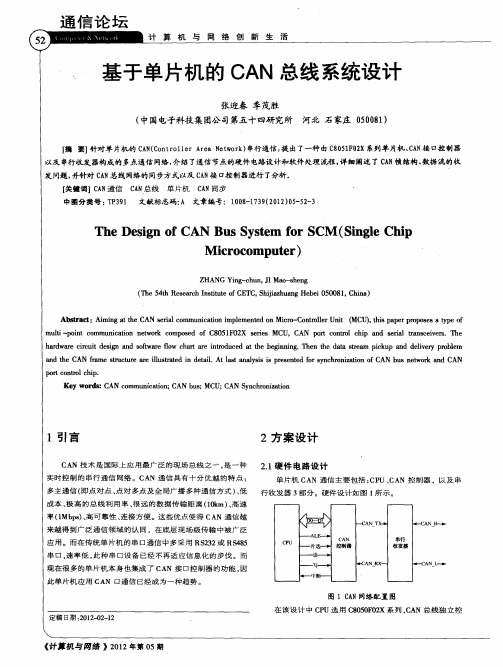
1 系统总体设计CAN总线系统总体结构如图1所示,主要包括上位机控制软件、USB-CAN转换模块、CAN节点、CAN总线介质(本处采用双绞线)组成。
其中一个CAN节点通过USB接口与PC 机相连,上位机控制软件能实时显示各CAN节点的数据且能通过上位机软件向各个CAN 节点发送数据以控制各节点的8个发光二极管的亮或灭。
2 系统硬件电路本系统由单片机外围电路、CAN总线硬件电路和USB-CAN转换电路组成。
单片机外围电路包括电源电路模块、复位电路模块、串口通信模块。
CAN总线硬件电路包括电气隔离模块、光耦隔离模块、CAN驱动器电路。
USB-CAN转换电路包括CH375与单片机接口电路模块和USB接口电路模块。
C8051F040单片机内部的控制器局域网(CAN)控制器是一个协议控制器,不提供物理层驱动器(即收发器),需要外部重新接入物理层驱动器。
本处采用TJ1050,TJA1050是控制器区域网络(CAN)协议控制器和物理总线之间的接口,是一种标准的高速CAN收发器。
TJA1050可以为总线提供差动发送性能,为CAN控制器提供差动接收性能。
TJA1050是PCA82C250和PCA82C251高速CAN收发器的后继产品。
单片机can总线工作原理
单片机can总线工作原理CAN总线是现代工业控制领域中常用的一种通信协议,它能够实现高速、可靠、实时的数据传输,广泛应用于汽车电子、智能家居、机器人等领域。
单片机CAN总线工作原理包括物理层、数据链路层、应用层三个部分。
首先,CAN总线的物理层是其中最基础的部分,主要是指通信的硬件接口和信号传输规范。
CAN总线是基于差分传输的,传输双方分别为CAN_H和CAN_L,每个节点都能够通过自身的CAN收发器对这两个信号进行采样和检测,以实现基于差分信号的数据传输。
其次,CAN总线的数据链路层是实现CAN网络数据通信的主要部分。
它定义了CAN帧的格式,以及传输过程中的错误检测与纠正机制。
其中,CAN帧包括帧头、帧数据和CRC校验码三个部分,帧头包括了数据的标识和长度等信息,帧数据则是发送节点要传输的具体内容,CRC校验码则是用于检测传输过程中的误码。
在CAN总线上进行通信时,每个节点都会进行帧的发送和接收,同时会对传输过程中遇到的误码进行检测和纠正,以保证数据传输的准确性。
最后,CAN总线的应用层指的是基于CAN总线的具体应用功能。
在实际的应用场景中,可以通过CAN总线将多个节点之间实现相互通信,同时对于不同的应用需求也可以使用不同的CAN节点进行扩展。
例如,可以通过CAN总线实现多个传感器的信号采集和传输,也可以通过CAN 总线实现多个执行器之间的命令交互等。
综上所述,单片机CAN总线的工作原理包括了物理层、数据链路层和应用层三个部分。
能够实现高速、可靠、实时的数据传输,广泛应用于工业控制领域的各个方面。
在实际的应用过程中,可以根据不同的需求和配置,通过CAN总线实现多个节点之间的通信和控制,以实现智能、高效的工业自动化控制。
基于PIC18单片机的CAN

基于PIC18单片机的CAN
0 引言
RS-485总线以双绞线为物理介质,工作在半双工的通信状态下,即同一时刻总线上只能有一个节点成为主节点而处于发送状态,其它所有节点必须处于接收状态。
如果同一时刻有两个以上的节点处于发送状态,将导致所有发送方的数据发送失败,即总线冲突。
为了避免这种总线冲突问题,RS-485总线必须具备:①以工作模式来说,一般的RS-485总线工作在主从模式下;②从通信节点来讲,RS-485总线上的节点必须具备可以将自己的驱动器切换到高阻态的功能。
以上是为适应RS-485总线的特殊之处而采用的措施,这样同时也带来了一些不足。
首先,这种总线工作方式在很多对实时性、可靠性要求高的工业控制场合有较大的局限性;其次,对驱动器实行的“发送态—高阻态”切换以及切换延迟等功能要求会使编程变得复杂。
同时在上电瞬间、CPU损坏或者程序跑飞的情况下,还需要考虑复杂的故障保护等问题,否则将容易引起总线故障。
控制器局域网CAN-bus (Controller Area Network)是国际上应用最广泛的现场总线之一。
最初CAN-bus被设计作为汽车环境中的微控制器通讯,意在车载各电子控制装置ECU之间交换信息,从而形成汽车电子控制网络。
如今,作为一种技术先进、可靠性高、功能完善、成本合理的远程网络通讯控制方式,CAN-bus已被广泛应用到各个自动化控制系统中。
而且它在通信能力、。
基于STM32的CAN总线接口设计与实现

图1 系统总体框图是一款带隔离的高速CAN收发器芯片,该芯片内部集成了所有必需的CAN隔离及CAN收发器件。
芯片的主要功能是将CAN控制器的逻辑电平转换为CAN总线的差分电平,并且具有DC 2500V的隔离功能及ESD保护作用,其是CAN收发器的理想选择[2]。
2 CAN总线收发模块的硬件设计CAN总线收发模块的硬件结构如图2所示。
CAN总线(1978-),男,江西宜春人,研究生,工程师。
研究方向:汽车电子项目管理。
公飞(1989-),男,山东临沂人,本科,助理工程师。
研究方向:汽车电子硬件设计。
收发模块的主要功能是控制开关和与RS232进行数据通信,开关可以用来控制现场设备的运行,后者可以方便与外界进行通信,提供通讯接口。
其硬件结构节点可以划分为最小系统模块、功能模块。
电源STM32的工作电压(VDD)为2.0~3.6V[3]。
通过内置的电压调节器提供所需的1.8V电源。
当主电源VDD掉电后,通过VBAT脚为实时时钟(RTC)和备份寄存器提供电源。
使用电池或其他电源连接到VBAT脚上,当VDD断电时,可以保存备份寄存器的内容和维持RTC的功能。
VBAT脚也图3 设置时钟流程图2.2 开关和RS232功能模块该节点具有两个功能,控制开关状态和与RS232通讯,开关选用八个TX2-5V继电器,两片MC1413作为驱动芯片,MC1413可以实现单片机端口电压到12V电平的转换。
与RS232通讯部分选用MAX232做为电平转换芯片。
2.3 CAN收发模块CAN收发模块主要是CAN收发器,CAN收发器的常用型号有CTM1050,CTM1050是一款带隔离的高速CAN收发器芯片,该芯片内部集成了所有必需的CAN隔离及CAN发器件。
芯片的主要功能是将CAN控制器的逻辑电平转换为CAN总线的差分电平,并且具有DC 2500V的隔离功能及ESD保护作用。
该芯片符合ISO 11898标准,因此,它可以和图2 节点硬件结构图图4 CAN初始化流程图选用的测试模式是环回模式,该模式下数据是自发自收的,即在发送成功的同时就接收到数据了。
单片机中的CAN总线技术与应用

单片机中的CAN总线技术与应用在现代工业控制领域中,单片机已经成为了不可或缺的一部分。
而在单片机的通信领域中,CAN总线技术正逐渐崭露头角,广泛应用于工业控制系统中。
本文将探讨CAN总线技术的基本原理,以及其在单片机中的应用。
一、CAN总线技术的基本原理CAN(Controller Area Network)总线技术是一种现场总线协议,最早由德国Bosch公司在20世纪80年代初开发。
它采用串行通信方式,在数据链路层采用非归零码(NRZ)来传输数据。
CAN总线技术拥有以下几个基本原理:1. 硬件结构CAN总线技术采用两线制结构,即CANH(高电平)和CANL (低电平),通过差分信号传输方式来实现数据传输。
这种结构可以有效降低传输过程中的电磁干扰,提高通信的可靠性。
2. 数据帧格式CAN总线技术中的数据帧由两部分组成:标识符(Identifier)和数据域(Data Field)。
标识符用于标识数据的类型和发送方或接收方的信息,数据域用于传输具体的数据。
此外,还包括控制域(Control Field)和CRC(循环冗余校验)域,用于实现数据的控制和校验。
3. 通信协议CAN总线技术采用基于事件的通信协议,即消息传递的方式。
在总线上,多个节点可以同时发送消息,总线上的节点根据标识符来判断是否接收此消息。
同时,CAN总线技术还支持优先级机制,可以根据消息的优先级来处理多个消息的冲突。
二、CAN总线技术在单片机中的应用CAN总线技术在单片机中广泛应用于工业控制系统以及汽车电子领域。
以下是CAN总线技术在单片机中的几个典型应用:1. 工业自动化控制在工业领域中,CAN总线技术可以用于实现各个控制节点之间的通信。
通过CAN总线,不同的控制节点可以实时地传输数据和控制指令,实现对工业设备的集中控制和监测。
同时,CAN总线技术还可以实现故障报警和数据采集等功能,提高工业自动化的效率和可靠性。
2. 汽车电子控制CAN总线技术在汽车电子领域中的应用非常广泛。
51单片机模拟can协议

51单片机模拟can协议51单片机是一种常见的嵌入式微控制器,具有广泛的应用。
CAN (Controller Area Network)协议是一种用于控制器之间通信的串行总线通信协议。
本文将介绍如何使用51单片机模拟CAN协议。
我们需要了解CAN协议的基本原理。
CAN协议是一种多主控制器、多节点的通信协议,用于在汽车、工业自动化等领域中实现控制器之间的高速、可靠通信。
CAN协议采用差分传输方式,通过两根线(CAN_H和CAN_L)进行数据传输。
CAN协议具有高抗干扰性、可靠性强等特点,因此在工业控制领域得到广泛应用。
要使用51单片机模拟CAN协议,我们首先需要了解CAN协议的基本通信过程。
CAN协议的通信过程包括以下几个步骤:帧的发送、帧的接收和错误处理。
在帧的发送过程中,发送节点将数据封装成CAN帧,并通过CAN总线发送给接收节点。
在帧的接收过程中,接收节点接收到CAN帧,并解析出其中的数据。
如果在通信过程中发生错误,CAN协议还提供了错误处理机制,可以及时检测和纠正错误。
在51单片机中模拟CAN协议的过程可以分为以下几个步骤:1. 配置51单片机的串口功能,使其能够模拟CAN总线的发送和接收功能。
可以通过设置串口的波特率、数据位、停止位等参数来实现。
2. 编写发送函数。
在发送函数中,我们需要将数据封装成CAN帧,并通过串口发送给接收节点。
可以使用51单片机的串口发送功能实现这一步骤。
3. 编写接收函数。
在接收函数中,我们需要通过串口接收CAN帧,并解析出其中的数据。
可以使用51单片机的串口接收功能实现。
4. 实现错误处理功能。
在通信过程中,可能会发生错误,如数据传输错误、帧格式错误等。
我们需要在程序中加入错误处理的代码,及时检测和纠正错误。
通过以上步骤,我们就可以在51单片机中模拟CAN协议的基本功能。
当然,要实现更复杂的功能,如多节点通信、数据校验等,还需要进一步深入学习CAN协议的相关知识和相关编程技巧。
基于DSPIC30F4011单片机的CAN总线通信设计
V0 .2 11 No 1 .2
De .201 c 0
2 0 1 月 01 年 2
两 台计 算机 上 同时运 行程 序 。 当程 序运 行 一段 时 问后 ,就可 对运 行结 果进 行分 析 。分析 时 ,可先 对 发送 端 进 行 分 析 。图2 示 是 其 寄存 器 的 测试 所
性 、实时 性 和灵 活 性 。事 实上 , 由于其 良好 的性 能 及 独特 的设 计 .C N总线 越 来 越受 到人 们 的重 A
也 支 持 该 协 议 的 C N 1 、C N .A、C . A . 2 A 20 AN 20 B P sie以及C N .BA t e 版本 。 as v A 2 ci 等 0 v
在 程 序 设 计 时 ,可 把 一 端作 为 发 送 数 据 端 .
字 信号 控 制器 进 行 通信 ,其 上 的C N 块 是 一 串 A 模
另一 端 作 为数 据 接 收端 。信 息从 C N 块 发送 到 A 模
C N总线 通 常是 由C 模 块 自动 完成 的 。发送 程 A AN 序 只 需 把 发 送 的 信 息 帧 送 到C N的 发 送 缓 冲 区 . A
人 C 接 收 缓 冲器 ,且 向单 片 机 发 出 中断 请 求 . AN 此 时 单 片机 可从 C N的接 收 缓 冲器 读 取 要接 收 的 A 数 据 。 图l 所示 是C N 线通 信 的简单 示意 图。 A 总
机相 当于C 总 线上 的两 个 结点 .再 编 写程 序 实 AN 现两 单 片机 之 间简单 通 信 的方法 。
机 的CAN总 线 通 信 的 实 现 方 法 。
关 键 词 :C N总 线 ;局 域 网 络 ;数 据 通 信 ;D PC O 4 1 A S I3F 0 1
单片机系统中的CAN总线接口技术讲解与实现
单片机系统中的CAN总线接口技术讲解与实现近年来,CAN总线接口技术在单片机系统中得到了广泛的应用。
CAN (Controller Area Network)总线是一种高速、实时性强的串行通信协议,特别适用于汽车电子、工业控制、机器人控制等领域。
它具有可靠性高、抗干扰能力强、扩展性好等优点,成为了单片机系统中常用的通信方式之一。
CAN总线接口技术的讲解:1. CAN总线基本原理:CAN总线由两根不同的线组成,分别是CAN_H和CAN_L线。
CAN_H线的电位高表示发生器状态,而CAN_L线的电位高则表示终端器状态。
CAN总线采用差分传输的方式,通过CAN_H和CAN_L线之间的差值来进行数据传输。
这种差分传输的方式不仅能够提高传输速率,而且能够抵抗电磁干扰。
2. CAN总线通信基本过程:CAN总线通信基本过程包括初始化、发送数据、接收数据和错误处理四个阶段。
在初始化阶段,需要配置CAN控制器和滤波器。
发送数据阶段中,发送节点将数据帧封装成CAN消息,并通过CAN总线发送给接收节点。
接收数据阶段中,接收节点监听CAN总线并接收数据帧。
错误处理阶段中,控制器会监测错误,并尽可能提供错误处理策略。
3. CAN帧结构:CAN总线传输的数据帧由四个部分组成:帧起始位(SOF),帧类型位(Control Field),数据域和校验码。
其中,帧起始位用于同步接收节点,帧类型位则用于指示数据帧或者远程帧。
数据域中存放了传输的具体数据,校验码用于检测数据的正确性。
4. CAN总线速率选择:CAN总线可以根据实际需求选择不同的传输速率。
常见的CAN总线速率有125kbps、250kbps、500kbps和1Mbps等。
选择合适的传输速率可以提高CAN总线系统的性能,但也会受到物理层限制。
CAN总线接口技术的实现:1. 硬件设计:实现CAN总线接口首先需要选择合适的单片机芯片,该芯片需要具备CAN控制器的功能。
接着,需要连接CAN控制器的引脚与CAN总线上的CAN_H和CAN_L线。
单片机can总线工作原理

单片机can总线工作原理CAN总线是一种高速、可靠的通信协议,广泛应用于汽车、工业控制、航空航天等领域。
单片机作为CAN总线的节点,可以通过CAN 总线与其他节点进行通信,实现数据的传输和控制。
CAN总线的工作原理是基于CSMA/CD(载波监听多点接入/碰撞检测)协议的。
在CAN总线上,每个节点都可以发送和接收数据帧。
当一个节点要发送数据时,它首先会监听总线上的信号,如果没有其他节点正在发送数据,它就可以开始发送数据帧。
如果有其他节点正在发送数据,它就会等待一段时间后再次监听总线,直到没有其他节点发送数据为止。
当两个节点同时发送数据时,就会发生碰撞。
此时,两个节点会停止发送数据,并等待一段随机时间后再次发送数据。
这个随机时间是为了避免再次发生碰撞。
如果一个节点发送的数据帧被其他节点接收到,它就会收到一个确认帧,表示数据已经成功传输。
如果一个节点发送的数据帧没有被其他节点接收到,它就会重新发送数据帧。
单片机作为CAN总线的节点,需要通过CAN控制器和CAN收发器来实现CAN总线的通信。
CAN控制器负责控制数据的发送和接收,而CAN收发器则负责将CAN控制器发送的数字信号转换成CAN总线上的模拟信号,并将CAN总线上的模拟信号转换成数字信号,供CAN控制器使用。
在单片机中,可以通过编程来实现CAN总线的通信。
首先需要初始化CAN控制器和CAN收发器,然后设置CAN总线的波特率、数据帧格式等参数。
接着可以通过发送数据帧和接收数据帧的函数来实现数据的传输和控制。
单片机作为CAN总线的节点,可以通过CAN控制器和CAN收发器实现与其他节点的通信。
CAN总线的工作原理是基于CSMA/CD 协议的,通过监听总线上的信号、发送数据帧、接收数据帧等步骤来实现数据的传输和控制。
51单片机can通信原理

51单片机can通信原理
51单片机CAN通信原理主要涉及到CAN总线的工作原理、硬件
连接和通信协议等方面。
首先,CAN(Controller Area Network)总线是一种串行通信
协议,用于在汽车、工业控制等领域中的实时控制系统中进行通信。
CAN总线采用差分信号进行通信,具有抗干扰能力强、传输距离远、传输速率高等特点。
在51单片机中,实现CAN通信需要通过CAN控制器和CAN总线
收发器来实现。
CAN控制器负责控制CAN总线的发送和接收,而CAN
总线收发器则负责将单片机的数字信号转换成CAN总线上的差分信号,并接收CAN总线上的差分信号并转换成数字信号供单片机处理。
在CAN通信中,数据通过CAN消息的形式进行传输。
CAN消息
由标识符(ID)和数据组成。
发送端通过CAN控制器将消息发送到CAN总线上,接收端通过CAN控制器接收并解析消息。
CAN总线采用CSMA/CR(Carrier Sense Multiple Access with Collision Resolution)协议,能够实现多个节点之间的协同工作,避免数据
冲突。
在硬件连接方面,需要将51单片机的CAN控制器和CAN总线收发器连接到CAN总线上,并通过电阻终端电阻来终止总线。
在软件开发方面,需要编写相应的CAN通信协议的驱动程序,实现CAN消息的发送和接收,并进行数据的解析和处理。
总的来说,51单片机CAN通信的原理涉及硬件连接、CAN消息的发送和接收、通信协议的实现等方面,需要综合考虑硬件和软件的设计。
希望这个回答能够全面地解答你的问题。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于单片机的CAN总线通讯实现
CAN总线通讯是一种广泛应用于车辆电子系统、工业自动化和机器控
制等领域的通讯协议,它具有高可靠性、实时性强和抗干扰能力强等优点。
在基于单片机的CAN总线通讯实现中,单片机作为CAN节点可以通过CAN
总线与其他节点进行数据的发送和接收。
一、硬件搭建
1.单片机选型
在CAN总线通讯实现中,可以选择支持CAN总线的单片机芯片。
常见
的单片机有STC12C5A60S2、AT89C51CC03等。
2.CAN总线收发器
CAN总线收发器是实现单片机与CAN总线之间相互之间通信的关键组件。
常见的CAN收发器有TJA1050、SN65HVD230等。
3.连接线
需要准备好与单片机芯片和CAN总线收发器相适应的连接线,如杜邦
线等。
二、软件实现
1.硬件初始化
首先,在单片机中需要初始化相关的硬件资源,包括引脚设置、定时
器设置等。
同时,也需要对CAN总线收发器进行初始化设置。
2.CAN总线配置
在单片机中,需要配置CAN总线相关的寄存器,包括波特率设置、帧
过滤设置等。
波特率的设置需要与其他CAN节点保持一致才可以正常通信。
3.数据发送
单片机向CAN总线发送数据时,首先需要检查发送缓冲区是否为空。
如果不为空,则需要等待缓冲区可用,并将要发送的数据写入到发送缓冲
区中。
随后,单片机向CAN总线发送一个请求发送的指令,然后等待发送
完成的中断信号。
4.数据接收
单片机接收CAN总线数据时,需要首先检查接收缓冲区是否为空。
如
果接收缓冲区有数据,则单片机将读取缓冲区数据,并进行数据的处理。
5.中断处理
CAN总线通讯中,可以通过中断的方式来处理数据的发送和接收。
单
片机通过设置相关中断触发源和中断服务程序来实现数据的异步传输。
三、通讯协议
CAN总线通讯中,可以使用标准CAN和扩展CAN两种协议。
标准CAN
协议使用11位标识符,扩展CAN协议使用29位标识符。
在通讯过程中,
需要设置相关的协议参数,包括标识符、数据长度码、帧类型等。
四、调试与验证
在实际应用中,需要通过合适的测试工具来验证CAN总线通讯的正常性。
可以通过CAN分析仪等设备来监测CAN总线上的数据传输,以及分析
传输过程中的错误和问题。
总结:
基于单片机的CAN总线通讯实现是一种常见的应用场景。
通过合理的硬件搭建和软件编程,可以实现CAN节点之间的数据传输。
在实践中,需要了解CAN总线通讯的基本原理和协议规范,并进行合适的调试与验证工作,以确保通讯的可靠性和稳定性。