利用SOC技术实现超声波测距模块
基于msp430单片机的超声波测距系统设计与实现

摘要本设计的内容是基于单片机MSP430的超声波测距系统。
主要是利用超声波的特点,将超声波测距系统与MSP430单片机结合起来,设计出测距报警系统。
当超声波传感器与障碍物的距离小于所设定的安全距离时,系统能发出声光警报,并随着距离的不断接近,报警频率不断提高。
与此同时还在液晶上显示出当前距离以及安全距离。
工作时超声波发射器发出超声波脉冲,超声波接收器接受到遇到障碍物反射回来的反射波,然后准确的测量超声波从发射到遇到障碍物反射返回的这段时间,根据超声波的传播速度,计算出到障碍物的距离。
本设计采用软、硬件结合的方法,并在Proteus中进行了系统仿真。
关键词:MSP430 超声波测距Abstract The content of this design is the ultrasonic ranging system based on single-chip 忽略puter MSP430. Mainly using the characteristics of ultrasonic 忽略bined ultrasonic ranging system with MSP430 single chip micro忽略puter, design range alarm system. When the ultrasonic sensors and obstacle distance is less than the safe distance set, the system can send out sound and light alarm, and with the close distance, alarm frequency increasing. At the same time also on the LCD shows the current distance and a safe distance. Work issue ultrasonic pulse ultrasonic emitter, ultrasonic receivers accept reflected the reflection to encounter obstacles, and then the accurate measurement of ultrasonic from launch to detect obstacles to reflect back to this period of time, according to the ultrasonic wave propagationvelocity, calculate the distance to the obstacles.This design adopts the method of bining software and hardware, and has carried on the system in the Proteus simulation.Keywords: Microcontroller MSP430 Ultrasonic Ranging目录前言 (1)第1章系统总体方案与框架 (2)1.1 设计整体思路与基本原理 (2)1.2 系统总体概述 (2)第2 章实现系统硬件设计 (4)2.1 主控模块 (4)2.2 超声波测距模块 (4)2.3 LCD显示模块 (6)2.4 声光报警模块 (10)2.5 系统参数调整模块 (10)第3 章系统软件设计 (11)3.1 运行方式控制程序流程设计 (11)第4 章电路调试及性能分析 (13)4.1 电路的调试 (13)4.1.1电源的选择 (13)4.1.2 蜂鸣器 (14)4.2 测试及结果分析 (14)结论 (15)致谢 (17)参考文献 (18)附件 (19)前言随着社会经济的迅速发展,人们生活水平不断提高,越来越多的人都拥有自己的汽车。
基于μC/OS-Ⅱ的高精度超声波测距系统设计

基于μC/OS-Ⅱ的高精度超声波测距系统设计1 引言超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而用于距离测量。
利用超声波检测往往较迅速、方便、计算简单、易于实时控制,且测量精度能达到工业实用要求,因此在移动机器人的研制中得到广泛应用。
移动机器人要在未知和不确定环境下运行,必须具备自动导航和避障功能。
超声波传感器以其信息处理简单、速度快和价格低的特点广泛用作移动机器人的测距传感器,实现避障、定位、环境建模和导航等功能。
2 系统总体设计方案2.1 超声波测距原理2.1.1 超声波发生器超声波为直线传播方式,频率高,反射能力强。
空气中其传播速度为340 m/s,容易控制,受环境影响小。
因此采用超生波传感器作为距离探测的“眼睛”,可用于测距领域的超声波频率为20~400 kHz的频段,空气介质中常用为40 kHz。
2.1.2 压电式超声波发生器原理压电式超声波发生器实际上利用压电晶体的谐振工作。
超声波发生器内部结构有2个压电晶片和1个共振板。
当它的两电极外加脉冲信号,其频率等于压电晶片的固有振荡频率时,压电晶片将发生共振,并带动共振板振动,产生超声波。
反之,如果两电极间未外加电压,当共振板接收到超声波时,将压迫压电品片振动,将机械能转换为电信号,这时就成为超声波接收器。
2.1.3 超声波测距原理超声波发射器向某一方向发射超声波,在发射的同时开始计时,超声波在空气中传播,碰到障碍物就立即返回。
超声波接收器收到反射波立即停止计时,超声波在空气中的传播速度为340 m/s。
系统中,超声波测距采用检测超声波往返时间的方法。
由于时间长度与声音通过的距离成正比,当超声波发射极发出一个短暂的脉冲波时,计时开始;当超声波接收端接收到第1个返回波脉冲后,计时立即停止。
根据计时器记录的时间t,可计算发射点距障碍物的距离(s),即:s=340t/2。
这就是所谓的时间差测距法。
2.2 系统总体设计该系统采用μC/OS-lI操作系统,系统将软件划分为4个功能模块:回波A/D采集模块,LED显示和按键处理模块,LCD显示模块,报警、存储及串口处理模块。
基于89c51的超声波测距单片机课设
基于89c51的超声波测距单片机课设一、引言本文将探讨基于89c51的超声波测距单片机课设的相关内容。
通过该课设,我们可以学习到单片机的基本原理和应用,以及超声波测距技术的实现原理和方法。
二、超声波测距原理超声波测距是一种通过发送超声波脉冲并测量其返回时间来计算距离的技术。
基于89c51的超声波测距单片机,可以通过以下步骤实现测距:1.初始化超声波模块和显示屏模块。
2.发送超声波脉冲。
3.接收超声波返回信号,并计算返回时间。
4.根据返回时间计算距离。
5.在显示屏上显示测距结果。
三、硬件设计1. 单片机选择我们选择使用89c51单片机作为控制芯片,因为它具有丰富的外设接口和较高的运算性能,适合用于控制超声波模块和显示屏。
2. 超声波模块超声波模块包括超声波发射器和接收器。
发射器用于发送超声波脉冲,接收器用于接收超声波的返回信号。
选择合适的超声波模块可以确保测距的准确性和稳定性。
3. 显示屏模块显示屏模块用于显示测距结果。
可以选择液晶显示屏或数码管等适合的显示模块。
四、软件设计1. 系统初始化在系统初始化阶段,需要对单片机的外设进行初始化设置,包括超声波模块和显示屏模块。
2. 超声波模块驱动程序超声波模块驱动程序用于控制超声波的发送和接收。
通过发送脉冲并计算返回时间,可以得到距离的测量结果。
3. 显示程序设计显示程序设计用于将测距结果显示在显示屏上。
可以通过数码管、液晶显示屏等方式实现。
五、实验步骤以下是基于89c51的超声波测距单片机课设的实验步骤:1.硬件搭建:连接89c51单片机、超声波模块和显示屏模块。
2.编写初始化程序:对单片机的外设进行初始化设置。
3.编写超声波模块驱动程序:控制超声波的发送和接收。
4.编写显示程序:将测距结果显示在显示屏上。
5.调试程序:通过实验验证程序的正确性和稳定性。
6.测距实验:将物体放置在不同距离上,进行测距实验,并记录测量结果。
7.分析实验结果:根据实验结果对课设进行评估和改进。
STM32单片机的高精度超声波测距系统的设计
STM32单片机的高精度超声波测距系统的设计STM32单片机是一款功能强大的微控制器,它在嵌入式系统和工控领域广泛应用。
其中,高精度超声波测距系统是STM32单片机应用的一个重要方向。
本文将着重介绍这一方向的系统设计。
一、系统设计概述高精度超声波测距系统基于超声波,其原理是测量声波从发射到反射再到回波的时间差,通过声速计算出距离。
本设计采用STM32F103C8T6单片机,外接一个超声波传感器,通过计算出的时间差计算出距离值,并在1602液晶屏上实时显示。
整个系统包括硬件电路和软件部分。
二、硬件电路设计硬件部分主要有超声波传感器、STM32开发板、LCD液晶屏、按键、二极管等组成。
超声波传感器和STM32通过GPIO口连接,超声波传感器的Trig引脚连接STM32的GPIOA12口,Echo引脚连接STM32的GPIOA11,其中Trig为输出,Echo为输入。
STM32还通过GPIO控制LCD液晶屏,LCD的4条数据总线分别连接到STM32的GPIOB3、GPIOB4、GPIOB5、GPIOB6口,而LCD的R、W、E口连接到STM32的GPIOA0、GPIOA1、GPIOA2口,按键通过GPIO口检测按键动作。
为了防止电路反向流,还需要连接1N4148二极管。
三、软件设计软件部分主要包括STM32的程序设计和LCD液晶屏模块设计。
首先,在开发板上使用Keil uVision编写STM32程序,主要包括IO口配置和中断处理,其中中断处理是通过TIM3定时器和输入捕获实现。
然后,通过Keil uVision编写LCD液晶屏模块程序,实现根据输入的距离值实时显示在LCD屏上,并进行滚动显示。
四、测试结果展示经过实际测试,该系统测距范围为2-400cm,精度为1cm。
并且,系统具有超过95%的测距成功率,能够满足实际需要。
图1为实际测试结果展示,图2为系统硬件电路示意图。
五、结论本文介绍了STM32单片机的高精度超声波测距系统的设计,包括硬件电路和软件设计。
stm32超声波测距系统设计
stm32超声波测距系统设计
STM32超声波测距系统设计是基于STM32单片机技术来
实现超声波测距,可以用于进行实时场景的距离测量。
首先,STM32单片机作为系统的核心芯片,主要用于控制系
统的逻辑程序,来进行超声波发射和接收信号的控制。
其次,依据实际应用场景,选择合适的超声发射和接收模块(模块包括超声波发射模块,接收模块),并将其与STM32 连接,由STM32控制超声波模块发射和接收,从而实现超声波测距。
最后,为了解读超声波测距所测得的数据,STM32 单片机上
运行的程序中需要包括时间计数,以及两个超声波信号模块之间的信号处理等,最后再由单片机传送出测距的最终数据,供外部使用。
总的来说,STM32超声波测距系统设计包括3个主要部分:
1. STM32单片机控制程序,负责控制信号处理,时间计数和
最后输出测距结果;
2. 超声波发射模块,用于发射超声波信号,以实现测量距离;
3. 超声波接收模块,用于接收发射出的超声波信号,以实现
测量距离。
因此,在设计这种超声波测距系统时,需要考虑这三方面的因素,以够给出比较准确的数据输出。
单片机超声波测距模块
table2[0]=cache[1]+'0';
table2[1]=cache[2]+'0';
table2[2]=cache[3]+'0';
table2[4]=cache[4]+'0';
write_com(0x80+2);
delay(20);
for(a=0;a<13;a++)
调试测量的部分测距数据如下表所示:
测试序号
显示距离(m)
实际距离(m)
误差(m)
1
0.035
0.034
0.001
2
1.00
1.00
0
3
1.257
1.255
0.002
4
1.364
1.365
0.001
5
2.148
2.147
0.001
调试测量的部分数据
八、设计体会与收获
本次试验目的为设计利用超声波传输中距离与时间的关系,采用STC51单片机进行控制和数据处理,设计出能够精确测量两点间距离的超声波测距仪。我们这次设计共有三个模块,分别是超声波模块,显示屏模块和报警模块。一开始搭建完成后,在调试的时候出现了很多问题,后来经过重新检查,最后才完成。
4.其他电路设计
a.复位电路
单片机在RESET端加一个大于20ms正脉冲即可实现复位,上电复位和按钮组合的复位电路如下:
图6复位电路
在系统上电的瞬间,RST与电源电压同电位,随着电容的电压逐渐上升,RST电位下降,于是在RST形成一个正脉冲。只要该脉冲足够宽就可以实现复位,即((RC(20ms。一般取R(1K(,C(22uF。当人按下按钮S1时,使电容C1通过R1迅速放电,待S1弹起后,C再次充电,手动复位。R1一般取200(。
基于STM32单片机的高精度超声波测距系统的设计

基于STM32单片机的高精度超声波测距系统的设计基于STM32单片机的高精度超声波测距系统的设计1. 引言超声波测距技术是一种常用的非接触性测量技术,具有测量范围广、分辨率高等优点,广泛应用于工业自动化、无人驾驶、智能家居等领域。
本文旨在设计一种基于STM32单片机的高精度超声波测距系统,以满足快速、准确、可靠的测距需求。
2. 系统设计2.1 硬件设计超声波测距系统主要由超声波发射器、接收器和信号处理模块组成。
其中,超声波发射器用于发射超声波信号,接收器用于接收反射回来的超声波信号,信号处理模块用于处理接收到的信号并计算出测距结果。
2.2 超声波发射器超声波发射器采用压电陶瓷传感器作为能量转换元件,通过驱动电路将驱动信号转化为超声波信号并发射出去。
为了实现高精度的测距,超声波发射器需要具备较高的频率响应和较窄的方向性。
2.3 超声波接收器超声波接收器采用同样的压电陶瓷传感器作为能量转换元件,利用其能够将接收到的超声波信号转化为电信号。
为了实现高灵敏度的接收,超声波接收器需要具备较高的响应灵敏度和较低的噪声。
2.4 信号处理模块信号处理模块采用STM32单片机作为核心处理器,通过多通道模数转换器(ADC)将接收到的电信号转化为数字信号。
然后,通过数字信号处理算法对信号进行滤波、增益控制和时域分析等操作。
最后,利用测量原理计算出测距结果,并将结果显示在液晶显示器上。
3. 系统工作原理3.1 发射信号超声波发射器以一定的频率发射超声波信号,信号经过传播并与目标物体相互作用后,被目标物体反射回来。
3.2 接收信号超声波接收器接收到反射回来的超声波信号,并将其转化为电信号。
信号经过放大、滤波等处理后,送入信号处理模块。
3.3 信号处理信号处理模块使用STM32单片机对接收到的信号进行处理。
首先,通过ADC转化为数字信号。
然后,进行信号滤波,去除噪声和回波干扰。
接着,采用增益控制技术,对信号进行放大或衰减,以适应不同距离的测量需求。
基于单片机的超声波测距报警系统

基于单片机的超声波测距报警系统在现代科技飞速发展的时代,各种智能化的测量和监控系统层出不穷。
其中,基于单片机的超声波测距报警系统以其高精度、非接触式测量、实时性强等优点,在工业生产、机器人导航、汽车防撞、智能家居等领域得到了广泛的应用。
一、超声波测距的原理超声波是一种频率高于 20kHz 的机械波,它具有良好的方向性和穿透能力。
超声波测距的原理是利用超声波在空气中的传播速度和往返时间来计算距离。
当超声波发射器向某一方向发射超声波时,在发射的同时开始计时。
超声波在空气中传播,遇到障碍物后反射回来,被超声波接收器接收。
此时,停止计时。
超声波在空气中的传播速度约为 340 米/秒,根据计时时间 t 和传播速度 v,就可以计算出发射点与障碍物之间的距离 s,计算公式为 s = v × t / 2 。
二、单片机在系统中的作用单片机作为整个系统的控制核心,承担着至关重要的任务。
它负责控制超声波的发射和接收,对计时时间进行精确测量,并根据测量结果进行距离计算和报警判断。
同时,单片机还需要与其他外部设备进行通信,如显示屏、声光报警器等,将测量结果实时显示出来,并在距离达到设定的阈值时触发报警。
为了实现这些功能,需要选择一款性能合适的单片机。
常见的单片机有 51 系列、STM32 系列等。
在选择单片机时,需要考虑其处理速度、存储空间、IO 端口数量、定时器精度等因素。
三、系统硬件设计1、超声波发射模块超声波发射模块通常由超声波换能器和驱动电路组成。
超声波换能器将电信号转换为超声波信号发射出去,驱动电路则为换能器提供足够的功率和激励信号。
2、超声波接收模块超声波接收模块由超声波换能器和信号调理电路组成。
换能器将接收到的超声波信号转换为电信号,信号调理电路对电信号进行放大、滤波等处理,以提高信号的质量和稳定性。
3、单片机最小系统单片机最小系统包括单片机芯片、时钟电路、复位电路和电源电路等。
它为单片机的正常工作提供了必要的条件。
超声波测距模块的工作原理
超声波测距模块的工作原理小伙伴,今天咱们来唠唠超声波测距模块这个超有趣的小玩意儿的工作原理吧。
你知道吗?超声波测距模块就像是一个小小的“测距精灵”呢。
它主要是靠超声波来工作的。
啥是超声波呀?简单来说呢,就是一种频率超级高的声波,高到我们人类的耳朵根本听不到,就像它在一个神秘的、我们听不到的声音世界里玩耍一样。
这个模块里面有个能发出超声波的东西,就像是一个小小的超声波制造机。
当它开始工作的时候,就会“噗”地一下把超声波发射出去。
这个超声波就像一个个看不见的小信使,朝着要测量距离的目标飞奔而去。
比如说你想知道这个小模块到前面那堵墙有多远,超声波就欢快地朝着墙跑过去啦。
然后呢,超声波碰到障碍物,就像调皮的小孩撞到了墙上一样,它可不会就这么消失哦。
它会被反射回来,就像一个被弹回来的小皮球。
这时候,超声波测距模块里还有个专门等着接收反射波的部分呢。
这个部分就像一个耐心的小守门员,眼睛一眨不眨地等着超声波小信使回来。
当它接收到反射回来的超声波后,就开始了一场神奇的计算之旅。
你想啊,超声波从发射出去到被反射回来,它在空气中可是走了一段路程的呢。
这个路程其实就是从模块到障碍物再回来的距离,是实际距离的两倍哦。
那它怎么算出距离的呢?这里面就用到了一个很巧妙的公式。
我们知道超声波在空气中传播的速度是相对固定的,大概是340米每秒。
就像汽车在公路上有个固定的速度一样。
模块通过测量从发射到接收超声波所用的时间,然后利用这个速度和时间的关系就能算出距离啦。
就好比你知道汽车的速度,又知道它跑了多久,就能算出跑了多远一样。
比如说,如果从发射到接收超声波用了0.01秒,那这个路程就是340乘以0.01等于3.4米,但这是往返的距离,所以到障碍物的实际距离就是3.4除以2等于1.7米啦。
是不是很神奇呢?这个超声波测距模块在生活中的用处可多啦。
像在一些自动停车系统里,它能帮助汽车知道离周围的障碍物有多远,这样就不会撞到东西啦。
还有在一些智能家居设备里,它可以检测人与设备之间的距离,然后做出相应的反应呢。
(整理)用51单片机设计超声波测距系统的设计原理及电路附源程序
基于51单片机的超声波测距仪说明书引言超声波测距仪,可应用于汽车倒车、建筑施工工地以及一些工业现场的位置监控,也可用于如液位、井深、管道长度的测量等场合。
利用超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声波经常用于距离的测量。
利用超声波检测往往比较迅速、方便、计算简单、易于做到实时控制。
一、性能要求该超声波测距仪,要求测量范围在0.08-3.00m,测量精度1cm,测量时与被测物体无直接接触,能够清晰稳定地显示测量结果。
二、工作原理及方案论证超声波传感器及其测距原理超声波是指频率高于20KHz的机械波。
用超声波传感器产生超声波和接收超声波,习惯上称为超声波换能器或超声波探头。
超声波传感器有发送器和接收器.超声波传感器是利用压电效应的原理将电能和超声波相互转化,即在发射超声波的时候,将电能转换,发射超声波;而在收到回波的时候,则将超声振动转换成电信号。
超声波测距的原理一般采用渡越时间法TOF(timeofflight)。
首先测出超声波从发射到遇到障碍物返回所经历的时间,再乘以超声波的速度就得到二倍的声源与障碍物之间的距离。
根据要求并综合各方面因素,采用AT89C52单片机作为主控制器,用动态扫描法实现LED数字显示,超声波驱动信号用单片机的定时器完成,超声波测距仪的系统框图如下图所示:图1 超声波测距仪系统设计框图三、系统硬件部分硬件部分主要由单片机系统及显示电路、超声波发射电路和超声波检测接收电路三部分组成。
1.单片机系统及显示电路单片机采用AT89C52来实现对CX20106A红外接收芯片和TCT40-10系列超声波转换模块的控制。
单片机通过P1.1引脚发射脉冲控制超声波的发送,然后单片机不停的检测外中断0口INT0引脚,当INT0引脚的电平由高电平变为低电平时就认为超声波已经返回。
计数器所计的数据就是超声波所经历的时间,通过换算就可以得到传感器与障碍物之间的距离。
显示电路采用简单实用的4位共阳LED数码管,段码用74LS244驱动,位码用PNP三极管驱动。
SoC FPGA在声波测井仪器中的软硬件协同设计

引言
声波测井仪器作为声波测井的主要工具,在设计 时 由 于井下高温、井径限 制 等 不 利 因 素 的 存 在,需 要 具 有 较 低 的功 耗 、较 小 的 体 积 以 及 大 批 量 数 据 的 快 速 处 理 能 力 。 [1-2] 早期设计时由于受到电子器件的限制,仪器内部数据 采 集 和处 理 电 路 普 遍 采 用 了 DSP+FPGA 的 多 核 架 构[3],该 架 构虽然具有很大的灵活性和较强的数据处理能力,但 缺 点 是高功耗、电路复杂、集成度低,并且降低了仪器整体 可 靠 性。随着测井温度的不断提高,对电路的功耗和集成 度 要 求 越 来 越 高 ,采 用 多 核 架 构 设 计 的 电 路 难 以 满 足 要 求 。
随着电子技术的发展,具有更高集成度和更低功 耗 的 SoC(SystemonChip)芯片被越来 越 多 地 应 用 到 嵌 入 式 系 统设计中,为提高系统可 靠 性 和 降 低 功 耗 发 挥 了 重 要 的 作 用。例如 Microsemi推 出 的 SmartFusion2 系 列 SoCFPGA 就是一种 集 微 处 理 器 子 系 统 MSS(MicrocontrollerSubsystem)和 FPGA 资源(FPGAFabric)于一体的低功耗、高集成 度芯片[4],将其用于声 波 测 井 数 据 采 集 和 处 理 电 路 设 计 可 以极大地降低功耗和提高集成度。
行 了 平 衡 优 化 设 计 ,最 后 结 合 器 件 特 点 进 行 了 低 功 耗 优 化 设 计 。
关 键 词 :SoCFPGA;软 硬 件 协 同 设 计 ;数 据 采 集
超声波测距模块原理
超声波测距模块原理
超声波测距模块是一种基于声波原理测量距离的装置。
该模块通过发射超声波脉冲,接收回波信号来计算距离。
具体原理如下:
1. 发射超声波脉冲:超声波测距模块内置的超声波发射器会发射一定频率的超声波脉冲。
通常采用的频率为40kHz。
2. 接收回波信号:超声波脉冲在遇到物体时会产生回波信号。
该模块内置的超声波接收器会接收这些回波信号。
3. 计算距离:根据声波传播的速度和回波信号的时间差,可以计算出物体到超声波测距模块的距离。
公式为:
距离 = 声速 x 时间差 / 2
其中,声速通常为340m/s,时间差是指超声波脉冲发射和回波信号接收之间的时间差。
由于回波信号需要经过来回两次传播,因此时间差要除以2。
超声波测距模块可广泛应用于超声波测距、避障、测量液位等领域,具有测量精度高、响应速度快、不受光线影响等优点。
- 1 -。
超声检测锂电池soc仿真案例
超声检测锂电池soc仿真案例(实用版)目录1.引言2.超声检测锂电池 SOC 的原理3.锂电池 SOC 的超声检测仿真案例4.结果与分析5.结论正文1.引言随着科技的发展,锂电池已成为许多领域中必不可少的能源,如手机、电动汽车等。
锂电池的荷电状态(State of Charge,简称 SOC)是指电池剩余电量与其总容量的比值,是衡量锂电池性能的重要指标。
为了保证锂电池的安全使用,必须对其 SOC 进行精确检测。
近年来,超声检测技术在锂电池 SOC 检测领域得到了广泛应用。
本文将介绍一种超声检测锂电池 SOC 的仿真案例。
2.超声检测锂电池 SOC 的原理超声检测技术是一种无损检测方法,通过分析超声波在物体中的传播特性,可以获得物体的内部信息。
在锂电池 SOC 检测中,超声波在电池内部的传播速度与电池的 SOC 密切相关。
一般来说,电池的电压、温度和工作电流等因素会影响电池的 SOC。
因此,通过分析超声波在电池内部的传播速度,可以间接地获取电池的 SOC 信息。
3.锂电池 SOC 的超声检测仿真案例在本文所提供的案例中,我们采用了一种基于超声检测技术的锂电池SOC 检测方法。
首先,我们需要建立一个锂电池的数学模型,该模型可以描述锂电池的电压、温度和工作电流等参数与 SOC 之间的关系。
接下来,我们通过实验收集锂电池在不同 SOC 状态下的超声波传播数据。
最后,我们利用机器学习算法,如支持向量机(SVM)或神经网络(NN),对收集到的数据进行训练,从而建立一个可以预测锂电池 SOC 的模型。
4.结果与分析通过对锂电池 SOC 的超声检测仿真案例的分析,我们可以得出以下结论:(1)超声检测技术可以有效地测量锂电池的 SOC,具有一定的准确性和可靠性。
(2)基于机器学习算法的锂电池 SOC 预测模型具有较好的预测性能,可以满足实际应用中的要求。
(3)锂电池的 SOC 与超声波在电池内部的传播速度之间存在一定的关系,可以通过分析这种关系来实现锂电池 SOC 的检测。
超声检测锂电池soc仿真案例
超声检测锂电池soc仿真案例摘要:I.引言- 超声检测技术在锂电池SOC 仿真中的应用- 超声检测技术的发展和优势II.超声检测技术的基本原理- 超声波的传播和接收- 超声检测技术的分类和应用III.锂电池SOC 仿真的意义和方法- SOC 的定义和测量方法- 锂电池SOC 仿真的重要性和应用- 常用的SOC 仿真方法IV.超声检测锂电池SOC 的案例分析- 超声检测锂电池SOC 的实验过程- 实验结果及其分析- 超声检测锂电池SOC 的技术优势V.超声检测锂电池SOC 的前景和挑战- 超声检测锂电池SOC 的发展趋势- 当前面临的技术挑战和解决方案VI.结论- 超声检测锂电池SOC 的技术价值和应用前景- 对未来研究的展望正文:随着科技的进步和新能源的快速发展,锂电池在电动汽车、储能电站等领域的应用越来越广泛。
然而,锂电池的性能和安全性一直是研究的热点和难点。
其中,锂电池的荷电状态(State of Charge, SOC)是衡量其性能和安全性的重要参数,准确测量SOC 对于锂电池的管理和保护至关重要。
超声检测技术作为一种无损检测方法,具有操作简便、成本低廉、精度高等优点,近年来在锂电池SOC 仿真领域得到了广泛关注。
本文将探讨超声检测技术在锂电池SOC 仿真中的应用和优势,并通过案例分析介绍超声检测锂电池SOC 的具体实现。
首先,我们简要介绍一下超声检测技术的基本原理。
超声波是一种频率高于人耳可听范围的机械波,具有穿透力强、能量损失小等特性。
超声检测技术利用超声波在材料中传播和接收的特性,对材料内部的结构和性能进行检测。
根据超声波的传播方式和检测原理,超声检测技术可分为多种类型,如纵波、横波、表面波等。
接下来,我们讨论锂电池SOC 仿真的意义和方法。
SOC 是指锂电池中剩余的电量或能量,通常用百分比表示。
准确测量SOC 有助于评估锂电池的剩余使用时间和性能,为电池管理系统提供依据。
常用的SOC 仿真方法包括开路电压法、库仑计数法、电化学阻抗谱法等。
毫米波雷达soc方案的电路及电路板结构

毫米波雷达soc方案的电路及电路板结构微波毫米波是一项最新兴起的技术,受到绝大多数行业的追捧,以其高频、高精度以及超低功耗特性而广受欢迎。
在电子设备中,微波毫米波的应用非常广泛,比如行车安全预警系统、物联网及自动驾驶技术,这些应用都涉及到微波毫米波雷达这一技术。
因此,微波毫米波雷达的集成化技术也受到了广泛的关注。
微波毫米波雷达SOC(System-on-a-Chip)方案利用先进的整合芯片技术,将复杂的传感器技术集成在一个芯片上,使其具备更高的性能和功能。
从电路结构上来看,微波毫米波雷达SOC结构一般包括多晶圆集成,其中集成了微波/毫米波传感器以及雷达处理与信号转换等相关电路。
它们之间通过控制信号和数据信号互相联系,由此构成一整套微波雷达电路系统。
微波/毫米波传感器一般分为三部分,其中一部分是用于发射微波毫米波的有源器件,一部分是用于接收微波毫米波的探测器,一部分是用于处理发射和接收信号的信号处理电路。
发射有源器件需要集成化放大器、滤波器及控制电路等,以实现高效率发射微波毫米波;探测器需要集成放大器及用于信号转换的混频器等,以实现微波毫米波的高灵敏度和低过载度。
另外,还需要实现雷达处理的信号处理部分,其中包括控制电路、数据采集电路以及计算处理电路等。
在这套系统中,也可以利用多核控制技术将多个功能模块集成在一个多核控制芯片中,从而实现复杂信号处理和数据处理功能,从而大大提高了处理效率。
在微波毫米波雷达SOC方案中,一般会采用整体集成的电路板结构,由一个主控制电路和多个小电路组成。
小电路包括传感器、放大器、混频器等,其中还有集成了发射和接收信号处理、控制及计算处理的多核容芯片。
系统内部的多个小型电路板之间可以根据所需要的功能通过功率、信号和控制线来连接,从而形成一个完整的雷达处理电路,它可以在电路板上完成雷达数据采集、处理和输出功能。
微波毫米波雷达SOC方案的电路结构及板结构的设计都在持续发展,它们的出现让微波毫米波技术发展变得更为简单快捷,并大大提高了微波毫米波雷达在应用方面的效率和可行性。
SoC FPGA在声波测井数据采集系统中的应用
SoC FPGA在声波测井数据采集系统中的应用张成晖;叶朝辉;张立伟;吴楠【摘要】FPGA + DSP architecture is used in traditional data acquisition system complicates the hardware design,and increases the power consumption. In recent years,system on chip(SoC)FPGA is becoming popular in embedded systems. Acoustic logging data acquisition system based on SoC FPGA combines the advantages of both microcontroller subsystem (MSS)and FPGA fabric. The proposed data acquisition system uses SoC technology which simplifies the hardware design,reduces power consumption and improves the reliability.%传统的数据采集系统采用现场可编程门阵列+数字信号处理器(FPGA+DSP)架构,复杂化了硬件设计,增加了系统功耗.以SoC FPGA为核心搭建的声波测井数据采集系统,充分发挥了微处理器控制能力强和现场可编程门阵列灵活的特点,利用总线互联通信等SoC技术,简化了硬件设计,降低了电路功耗,提高了系统的可靠性.【期刊名称】《传感器与微系统》【年(卷),期】2017(036)003【总页数】3页(P150-152)【关键词】声波测井;数据采集;片上系统现场可编程门阵列(SoCFPGA)【作者】张成晖;叶朝辉;张立伟;吴楠【作者单位】清华大学自动化系,北京100084;清华大学自动化系,北京100084;清华大学自动化系,北京100084;清华大学自动化系,北京100084【正文语种】中文【中图分类】TP23声波测井是地球物理测井中的主要测井方法之一,其目的就是运用声波在岩层中的各种传播规律,测量所钻地层的地质和岩石物理参数,来获取地层的油、气藏的存在与岩性等特征[1]。
数字电路期末课程设计总结(二)——超声波测距模块
数字电路期末课程设计总结(⼆)——超声波测距模块废话不多说。
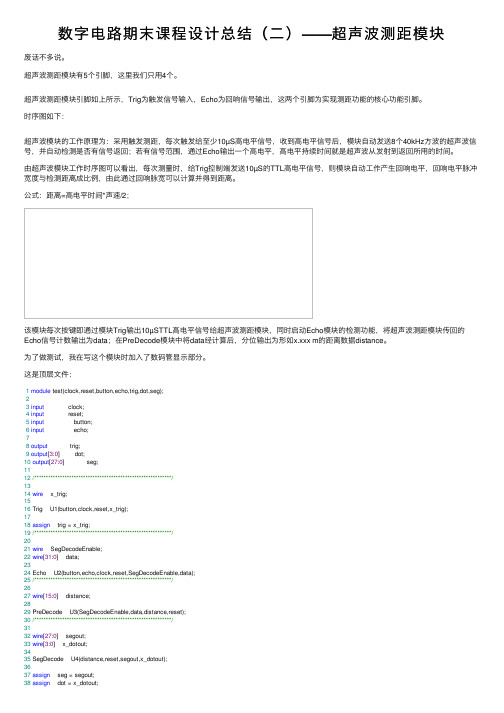
超声波测距模块有5个引脚,这⾥我们只⽤4个。
超声波测距模块引脚如上所⽰,Trig为触发信号输⼊,Echo为回响信号输出,这两个引脚为实现测距功能的核⼼功能引脚。
时序图如下:超声波模块的⼯作原理为:采⽤触发测距,每次触发给⾄少10µS⾼电平信号,收到⾼电平信号后,模块⾃动发送8个40kHz⽅波的超声波信号,并⾃动检测是否有信号返回;若有信号范围,通过Echo输出⼀个⾼电平,⾼电平持续时间就是超声波从发射到返回所⽤的时间。
由超声波模块⼯作时序图可以看出,每次测量时,给Trig控制端发送10µS的TTL⾼电平信号,则模块⾃动⼯作产⽣回响电平,回响电平脉冲宽度与检测距离成⽐例,由此通过回响脉宽可以计算并得到距离。
公式:距离=⾼电平时间*声速/2;该模块每次按键即通过模块Trig输出10µSTTL⾼电平信号给超声波测距模块,同时启动Echo模块的检测功能,将超声波测距模块传回的Echo信号计数输出为data;在PreDecode模块中将data经计算后,分位输出为形如x.xxx m的距离数据distance。
为了做测试,我在写这个模块时加⼊了数码管显⽰部分。
这是顶层⽂件:1module test(clock,reset,button,echo,trig,dot,seg);23input clock;4input reset;5input button;6input echo;78output trig;9output[3:0] dot;10output[27:0] seg;1112/***********************************************************/1314wire x_trig;1516 Trig U1(button,clock,reset,x_trig);1718assign trig = x_trig;19/***********************************************************/2021wire SegDecodeEnable;22wire[31:0] data;2324 Echo U2(button,echo,clock,reset,SegDecodeEnable,data);25/***********************************************************/2627wire[15:0] distance;2829 PreDecode U3(SegDecodeEnable,data,distance,reset);30/***********************************************************/3132wire[27:0] segout;33wire[3:0] x_dotout;3435 SegDecode U4(distance,reset,segout,x_dotout);3637assign seg = segout;38assign dot = x_dotout;39/***********************************************************/4041endmodule42这是Trig端⼝控制模块。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
利用SOC技术实现超声波测距模块
作者:刘高平
作者单位:浙江万里学院,电子工程研究所,浙江,宁波,315100
刊名:
电子技术应用
英文刊名:APPLICATION OF ELECTRONIC TECHNIQUE
年,卷(期):2006,32(1)
被引用次数:1次
1.PSoC(tm) Designer User Guide 2004
2.Cypress MicroSystems CY8C25122/CY8C26233/CY8C26443/CY8C26643 Family Data Sheet 2003
3.富锦华汽车倒车雷达的单片机实现方案[期刊论文]-微电子学与计算机 2002(01)
4.路锦正超声波测距仪的设计[期刊论文]-传感器技术 2002(08)
5.邱瑞昌泊车用超声波测距仪的研制[期刊论文]-电子产品世界 2001(09)
1.周殿凤.康素成.王俊华基于CPLD的ATM安全警示系统设计[期刊论文]-信息化研究 2009(3)
本文链接:/Periodical_dzjsyy200601031.aspx。