US-100超声波测距模块
US-100

dispbuf[0] = 10; //显示 "-"
dispbuf[1] = 10; //显示 "-"
dispbuf[2] = 10; //显示 "-"
dispbuf[3] = 10; //显示 "-"
//定时器0中断,用做显示
timer0() interrupt 1 // 定时器0中断是1号
{
uchar dispcount; //自定义寄存器
static unsigned char count=0;
TH0 =(65536-2500)/256; //约2.50MS定时器初值
}
/*******************************************************************************************/
void DisplayLength(unsigned long number)
{
if(number > 4500) //如果大于4.5米,显示 "-"
{
UARTSnd(0X55);
}
/*******************************************************************************************/
void main(void)
{
unsigned long PreLength = 0;
led1 = ~led1;
}
/*******************************************************************************************/
超声波测距报告(带报警)

目录一、超声波测距原理二、超声波测距模块介绍1.主控模块2.电源模块3.显示模块4.超声波模块5.扬声器模块三、超声波测距功能介绍四、超声波测距前景展望五、心得附:程序超声波测距(可报警)一、超声波测距原理超声波发射器定期发送超声波,遇到被测物体时发生反射,反射波经超声波接收器接收并转化为电信号,只要测出发送和接收的时间差t,即可测出超声测距装置到被测物体之间的距离S:S=c*t/2(式中c为超声波在空气中的传播速度,c=331.45*√(1+T/273.16)) 由此可见声速与温度的密切的关系。
在应用中,如果温度变化不大或者对测量要求不太高(例如汽车泊车定位系统),则可认为声速是不变的,否则,必须进行温度补偿。
超声波传感器是超声测距核心部件,传感器按其工作介质可分气相、液相和固相传感器;按其发射波束宽度可分为宽波束和窄波束传感器;按其工作频率又可分为40kHz, 5OkHz等不同等级。
超声波在空气传播过程中,由于空气吸收衰减和扩散损失,声强随着传播距离的增大而衰减,而超声波的衰减随频率增大而成指数增加。
本设计选用气相、窄波束、40kHz的超声波传感器。
二、超声波测距模块介绍该产品共有五个模块,其中主控模块、电源模块、显示模块、扬声器模块集成在开发板上,超声波模块是外接的。
1.主控模块主要部分是51单片机。
51单片机是对目前所有兼容Intel 8031指令系统的单片机的统称。
该系列单片机的始祖是Intel的8031单片机,后来随着Flash rom技术的发展,8031单片机取得了长足的进展,成为目前应用最广泛的8位单片机之一,其代表型号是ATLEM公司的AT89系列,它广泛应用于工业测控系统之中。
目前很多公司都有51系列的兼容机型推出,在目前乃至今后很长的一段时间内将占有大量市场。
51单片机是基础入门的一个单片机,还是应用最广泛的一种。
需要注意的是52系列的单片机一般不具备自编程能力。
主要功能:·8位CPU·4kbytes 程序存储器(ROM) (52为8K)·256bytes的数据存储器(RAM) (52有384bytes的RAM)·32条I/O口线·111条指令,大部分为单字节指令·21个专用寄存器·2个可编程定时/计数器·5个中断源,2个优先级(52有6个)·一个全双工串行通信口·外部数据存储器寻址空间为64kB·外部程序存储器寻址空间为64kB·逻辑操作位寻址功能·双列直插40PinDIP封装·单一+5V电源供电CPU:由运算和控制逻辑组成,同时还包括中断系统和部分外部特殊功能寄存器;RAM:用以存放可以读写的数据,如运算的中间结果、最终结果以及欲显示的数据;ROM:用以存放程序、一些原始数据和表格;I/O口:四个8位并行I/O口,既可用作输入,也可用作输出;T/C:两个定时/记数器,既可以工作在定时模式,也可以工作在记数模式;五个中断源的中断控制系统;一个全双工UART(通用异步接收发送器)的串行I/O口,用于实现单片机之间或单片机与微机之间的串行通信;片内振荡器和时钟产生电路,石英晶体和微调电容需要外接。
US-100超声波测距模块
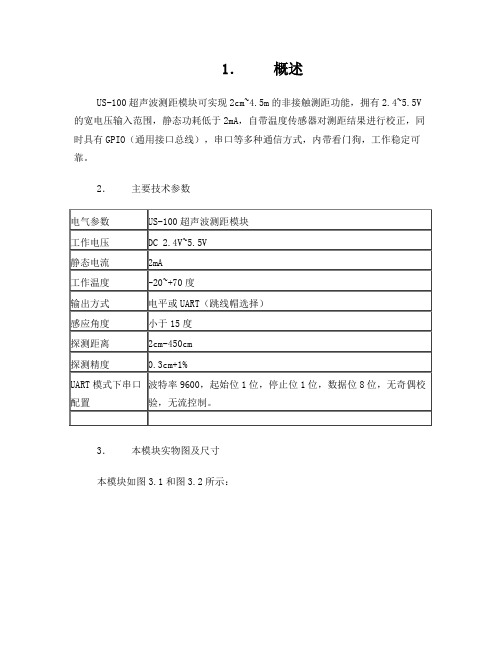
1.概述US-100超声波测距模块可实现2cm~4.5m的非接触测距功能,拥有2.4~5.5V 的宽电压输入范围,静态功耗低于2mA,自带温度传感器对测距结果进行校正,同时具有GPIO(通用接口总线),串口等多种通信方式,内带看门狗,工作稳定可靠。
2.主要技术参数3.本模块实物图及尺寸本模块如图3.1和图3.2所示:图3.1:US-100正面图本模块的尺寸:45mm*20mm*1.6mm。
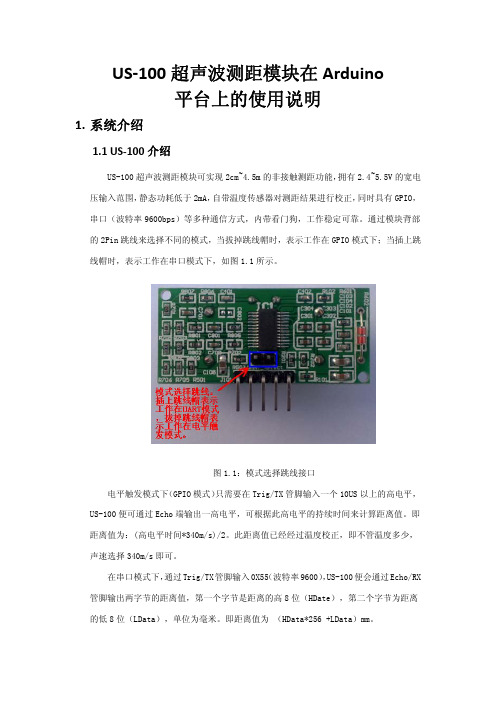
板上有两个半径为1mm的机械孔,如图3.3所示:图3.3:US-100尺寸图4.接口说明本模块共有两个接口,即模式选择跳线和5 Pin接口。
模式选择跳线接口如图4.1所示。
模式选择跳线的间距为2.54mm,当插上跳线帽时为UART(串口)模式,拔掉时为电平触发模式。
图4.1:模式选择跳线接口5 Pin接口为2.54mm间距的弯排针,如图4.2所示:图4.2:5 Pin接口从左到右依次编号1,2,3,4,5。
它们的定义如下:●1号Pin:接VCC电源(供电范围2.4V~5.5V)。
●2号Pin:当为UART模式时,接外部电路UART的TX端;当为电平触发模式时,接外部电路的Trig端。
●3号Pin:当为UART模式时,接外部电路UART的RX端;当为电平触发模式时,接外部电路的Echo端。
●4号Pin:接外部电路的地。
●5号Pin:接外部电路的地。
5.电平触发测距工作原理在模块上电前,首先去掉模式选择跳线上的跳线帽,使模块处于电平触发模式。
电平触发测距的时序如图5.1所示:图5.1:US-100测距时序图图5.1表明:只需要在Trig/TX管脚输入一个10US以上的高电平,系统便可发出8个40KHZ的超声波脉冲,然后检测回波信号。
当检测到回波信号后,模块还要进行温度值的测量,然后根据当前温度对测距结果进行校正,将校正后的结果通过Echo/RX管脚输出。
在此模式下,模块将距离值转化为340m/s时的时间值的2倍,通过Echo端输出一高电平,可根据此高电平的持续时间来计算距离值。
US-100超声波测距模块在Arduino平台上的使用说明
unsigned int TrigPin = 3; //将 Arduino 的 Pin3 连接至 US-100 的 Trig/TX unsigned long Time_Echo_us = 0; unsigned long Len_mm = 0;
void setup() { //Initialize
如果先将 US-100 与 Arduino 连好,再给 Arduino 下载程序,在下载程序时会出错, 因为 US-100 与 Arduino 的通信和 Arduino 下载程序时使用的同一个串口,会相互干扰。
图 3.1:串口模式下 US‐100 与 Arduino 的连接
3.2 串口模式下测距使用例程
}
3.3 串口模式下测温使用例程
int Temperature45 = 0;
void setup() { //将 Arduino 的 RX 与 TX(Digital IO 0 和 1)分别于 US-100 的 Echo/Rx 和 Trig/Tx 相连,确保连接前已经使 US-100 处于串口模式。
Serial.begin(9600); //设置波特率为 9600bps. }
Serial.begin(9600); //测量结果将通过此串口输出至 PC 上的串口监视器 pinMode(EchoPin, INPUT);//设置 EchoPin 为输入模式。 pinMode(TrigPin, OUTPUT); //设置 TrigPin 为输出模式。 }
void loop()
{ //通过 Trig/Pin 发送脉冲,触发 US-100 测距
unsigned int HighLen = 0; unsigned int LowLen = 0; unsigned int Len_mm = 0; void setup() { //将 Arduino 的 RX 与 T(X Digital IO 0 和 1)分别于 US-100 的 Echo/Rx 和 Trig/Tx 相连,确保连接前已经使 US-100 处于串口模式。
US-100超声波模块测试板使用说明V1

US‐100超声波模块测试板使用说明 1.概述US-100超声波测距模块可实现0~4.5m的非接触测距功能,拥有2.4~5.5V的宽电压输入范围,静态功耗低于2mA,自带温度传感器对测距结果进行校正,同时具有GPIO,串口等多种通信方式,内带看门狗,工作稳定可靠。
US-100测试板可实现对US-100模块两种测距模式的测试。
2.测试板接口说明在进行测试时,本模块共用到如下4个接口:z S401:3Pin模式选择拨码开关z Trig模式接口:在电平触发模式下接超声波测距模块z UART模式接口:在UART模式下接超声波测距模块z2Pin电源接口:接3~3.6V直流电源。
接口位置如图2.1所示:图2.1:US-100测试板接口示意图3.电源接口电源接口如图3.1所示图3.1:电源接口说明 4.模式选择拨码开关图4.1:模式选择拨码开关说明5.电平触发模式测试在电平触发模式下进行测试,需先将拨码开关的1号及2号Pin 拨至下方,将3号Pin拨至上方,然后按照下列步骤进行: z将US-100超声波测距模块背部的模式选择跳线拔掉。
z将US-100超声波模块插至测试板的Trig模式接口。
z将测试板上电。
如图5.1所示:图5.1:电平触发模式测试场景图说明:电平触发模式下,数码管第一排显示“-25”,无意义;第二排显示当前测量距离值,单位是mm,图5.1中显示为196mm。
6.串口模式测试在串口触发模式下进行测试,需先将拨码开关的1号及3号Pin 拨至下方,将2号Pin拨至上方,然后按照下列步骤进行:z将US-100超声波测距模块背部的模式选择跳线插上。
z将US-100超声波模块插至测试板的Trig模式接口。
z将测试板上电。
如图6.1所示:图6.1:串口模式测试场景图说明:UART模式下,第一排显示的是温度值,图6.1中为20度;第二排显示的是当前测量的距离值,单位为mm,图6.1中为196mm。
常用超声波模块
常用超声波模块
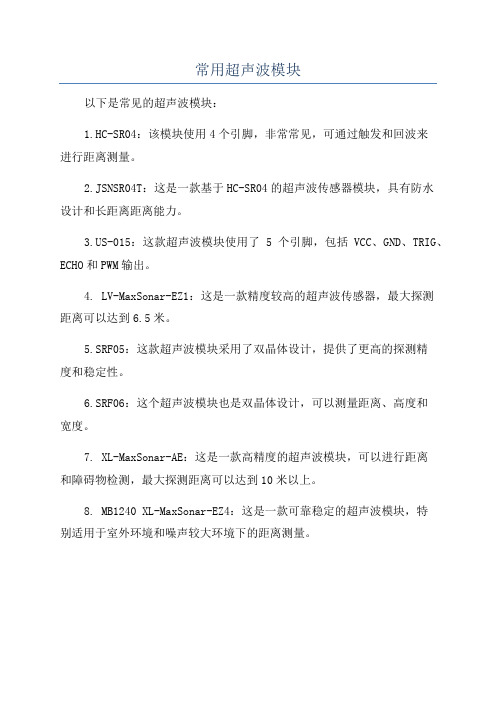
以下是常见的超声波模块:
1.HC-SR04:该模块使用4个引脚,非常常见,可通过触发和回波来
进行距离测量。
2.JSNSR04T:这是一款基于HC-SR04的超声波传感器模块,具有防水
设计和长距离距离能力。
-015:这款超声波模块使用了5个引脚,包括VCC、GND、TRIG、ECHO和PWM输出。
4. LV-MaxSonar-EZ1:这是一款精度较高的超声波传感器,最大探测
距离可以达到6.5米。
5.SRF05:这款超声波模块采用了双晶体设计,提供了更高的探测精
度和稳定性。
6.SRF06:这个超声波模块也是双晶体设计,可以测量距离、高度和
宽度。
7. XL-MaxSonar-AE:这是一款高精度的超声波模块,可以进行距离
和障碍物检测,最大探测距离可以达到10米以上。
8. MB1240 XL-MaxSonar-EZ4:这是一款可靠稳定的超声波模块,特
别适用于室外环境和噪声较大环境下的距离测量。
超声波传感器测距
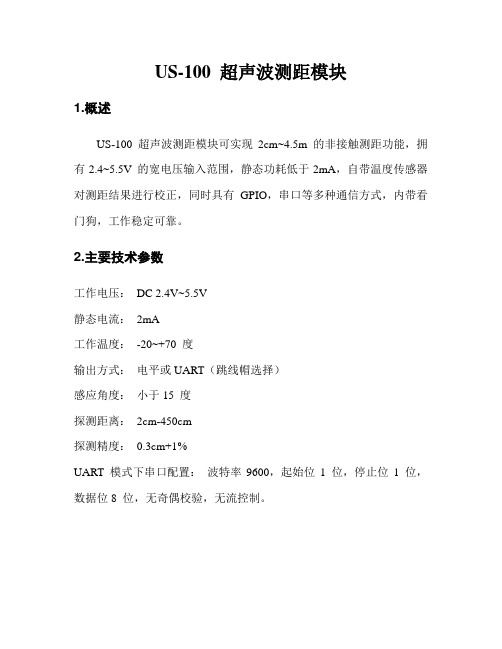
US-100 超声波测距模块1.概述US-100 超声波测距模块可实现2cm~4.5m 的非接触测距功能,拥有2.4~5.5V 的宽电压输入范围,静态功耗低于2mA,自带温度传感器对测距结果进行校正,同时具有GPIO,串口等多种通信方式,内带看门狗,工作稳定可靠。
2.主要技术参数工作电压:DC 2.4V~5.5V静态电流:2mA工作温度:-20~+70 度输出方式:电平或UART(跳线帽选择)感应角度:小于15 度探测距离:2cm-450cm探测精度:0.3cm+1%UART 模式下串口配置:波特率9600,起始位1 位,停止位1 位,数据位8 位,无奇偶校验,无流控制。
3.实物图(自己拍的不是很清楚)4.测量原理选用超声波传感器来采集信号,超声波发射端和接收端在同一水平面上。
首先发射端向目标发射超声波,并同时启动定时器计时,超声波在空气中传播的途中一旦遇到障碍物后就会被反射回来,当接收端收到反射波后就会给负脉冲到单片机使其立刻停止计时。
定时器能够准确的记录下超声波发射点至障碍物之间往返传播所用的时间t,设声速为c,可得距离测量值为:s=ct/2,由单片机控制定时器可测得t值,从而得到s 值。
5.程序源代码本代码是基于C8051F120单片机,采用LCD液晶显示屏进行显示,经过多次调试可将误差缩小至1-2mm。
#include<c8051f120.h>#include<intrins.h>#include<declare.h>typedef unsigned char uchar;typedef unsigned int uint;extern uchar old_SFRPAGE;double n0=0,n=0;float M0, t,s;sbit D=P1^0;//连TX //输出高低电平sbit Q=P1^1;//连RXuchar flag=0;uchar flag_0=1;void timer1_int() // 定时器1,产生中断{old_SFRPAGE = SFRPAGE;SFRPAGE=0X00;TL1=0X00;TH1=0X00;TMOD|=0X90; //定时器1方式1,16位定时器功能, CKCON=0X00; //TCLK=SYSCLK/12;TCON|=0X40; //启动定时器1ET1=1;EA=1; //允许定时器1中断SFRPAGE = old_SFRPAGE;}void timer1_intr() interrupt 3{old_SFRPAGE = SFRPAGE;SFRPAGE=0X00;n0++;TF1=0;SFRPAGE=old_SFRPAGE;}void timer3_int() //定时器3溢出标志位必须使用软件清0{ //16 位自动重载定时器,当初值为0xFFDB 时为200000Hz,周期为5usold_SFRPAGE = SFRPAGE;SFRPAGE=0x01;TMR3L = 0XDB;TMR3H = 0XFF; //初值RCAP3L = 0XDB;RCAP3H = 0XFF; //重载值(捕捉寄存器)TMR3CF = 0X00; //sysclk/12 向上计数TMR3CN = 0X04; //自动重载EIE2 = 0X01;EA=1; //允许中断SFRPAGE = old_SFRPAGE;}void timer3_intr() interrupt 14{n++;if(n > 2000){n = 0;}if(n<5) //25usD=1;elseD=0;old_SFRPAGE = SFRPAGE;SFRPAGE=0x01;TMR3CN &= 0X7F; //清除中断标志SFRPAGE = old_SFRPAGE;}void port_int(){old_SFRPAGE = SFRPAGE;SFRPAGE=0x0F;P1MDOUT=0XFF; //推挽输出,键盘P3|=0X02; //液晶端口接P3XBR1=0X10; // INT1 接到端口XBR2=0X40; //允许交叉开关,全局弱上拉SFRPAGE = old_SFRPAGE;}uchar code num[16][16]={ {0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,0x00,0x0F,0x10,0x20,0x20,0x10,0x0F ,0x00},{0x00,0x10,0x10,0xF8,0x00,0x00,0x00,0x00,0x00,0x20,0x20,0x3F,0x20,0x20,0x00 ,0x00},{0x00,0x70,0x08,0x08,0x08,0x88,0x70,0x00,0x00,0x30,0x28,0x24,0x22,0x21,0x30, 0x00},{0x00,0x30,0x08,0x88,0x88,0x48,0x30,0x00,0x00,0x18,0x20,0x20,0x20,0x11,0x0E ,0x00},{0x00,0x00,0xC0,0x20,0x10,0xF8,0x00,0x00,0x00,0x07,0x04,0x24,0x24,0x3F,0x24 ,0x00},{0x00,0xF8,0x08,0x88,0x88,0x08,0x08,0x00,0x00,0x19,0x21,0x20,0x20,0x11,0x0E ,0x00},{0x00,0xE0,0x10,0x88,0x88,0x18,0x00,0x00,0x00,0x0F,0x11,0x20,0x20,0x11,0x0E ,0x00},{0x00,0x38,0x08,0x08,0xC8,0x38,0x08,0x00,0x00,0x00,0x00,0x3F,0x00,0x00,0x00 ,0x00},{0x00,0x70,0x88,0x08,0x08,0x88,0x70,0x00,0x00,0x1C,0x22,0x21,0x21,0x22,0x1 C,0x00},{0x00,0xE0,0x10,0x08,0x08,0x10,0xE0,0x00,0x00,0x00,0x31,0x22,0x22,0x11,0x0F ,0x00},{0x00,0x00,0xC0,0x38,0xE0,0x00,0x00,0x00,0x20,0x3C,0x23,0x02,0x02,0x27,0x3 8,0x20},{0x08,0xF8,0x88,0x88,0x88,0x70,0x00,0x00,0x20,0x3F,0x20,0x20,0x20,0x11,0x0E ,0x00},{0xC0,0x30,0x08,0x08,0x08,0x08,0x38,0x00,0x07,0x18,0x20,0x20,0x20,0x10,0x08 ,0x00},{0x08,0xF8,0x08,0x08,0x08,0x10,0xE0,0x00,0x20,0x3F,0x20,0x20,0x20,0x10,0x0F ,0x00},{0x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,0x20,0x3F,0x20,0x20,0x23,0x20,0x18 ,0x00},{0x08,0xF8,0x88,0x88,0xE8,0x08,0x10,0x00,0x20,0x3F,0x20,0x00,0x03,0x00,0x00 ,0x00},};//0~Fuchar code shen[]={0x00,0x00,0x00,0xFC,0x54,0x56,0x55,0x54,0x54,0x54,0x54,0xFC,0x00,0x80,0 x40,0x00,0x40,0x42,0x42,0x23,0x22,0x22,0x12,0x12,0x0A,0x46,0x82,0x7F,0x01,0x00,0x00,0x00 ,};uchar code gao[]={0x04,0x04,0x04,0x04,0xF4,0x94,0x95,0x96,0x94,0x94,0xF4,0x04,0x04,0x04,0x 04,0x00,0x00,0xFE,0x02,0x02,0x7A,0x4A,0x4A,0x4A,0x4A,0x4A,0x7A,0x02,0x82,0xFE,0x00, 0x00,};unsigned char code danwei[][16]={{0x00,0x00,0x00,0xC0,0xC0,0x00,0x00,0x00,0x00,0x00,0x00,0x30,0x3 0,0x00,0x00,0x00},//:{0x80,0x80,0x80,0x80,0x80,0x80,0x80,0x00,0x20,0x3F,0x20,0x00,0x3F,0x20,0x00,0x3 F},//m{0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x01,0x01,0x01,0x01,0x01,0x0 1},//-};//uchar code dian[]={0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x30,0x30,0x00,0x00,0x00,0x 00,0x00};void display (float dat){uint x1,x2,x3,x4;x1=(uint)(dat)%10;x2=(uint)((dat)/10)%10;x3=(uint)((dat)/100)%10;x4=(uint)((dat)/1000)%10;if((dat>1500)&&(dat<1900)){lcd_disword(0,0,shen);lcd_disword(18,0,gao);lcd_disletter(36,0,danwei[0]);lcd_disletter(45,0,num[x4]);lcd_disletter(54,0,num[x3]);lcd_disletter(63,0,num[x2]);lcd_disletter(72,0,num[x1]);lcd_disletter(81,0,danwei[1]);lcd_disletter(90,0,danwei[1]);}else{//x5=(uint)((dat)/10000)%10;//y1=(uint)(dat*10)%10;//y2=(uint)(dat*100)%10;//y3=(uint)(dat*1000)%10;//lcd_disletter(24,4,num[x5]);lcd_disword(0,0,shen);lcd_disword(18,0,gao);lcd_disletter(36,0,danwei[0]);lcd_disletter(45,0,danwei[2]);lcd_disletter(54,0,danwei[2]);lcd_disletter(63,0,danwei[2]);lcd_disletter(72,0,danwei[2]);lcd_disletter(81,0,danwei[1]);lcd_disletter(90,0,danwei[1]);//lcd_disletter(64,4,dian);//lcd_disletter(72,4,num[y1]);//lcd_disletter(80,4,num[y2]);//lcd_disletter(88,4,num[y3]);}}void main()uchar i;sys_int();oscx_int();pll_int();port_int();lcd_int();for(i=255;i>0;i--)delay1ms();timer3_int();timer1_int();delay1ms();lcd_clr();while(1){//display(s);if(Q==0) //当门控为0时进行计算并显示{if(flag==0){ old_SFRPAGE = SFRPAGE;SFRPAGE=0x00;M0=n0*65536+(TL1+TH1*256);t=M0/(11.0592*1000000*8/12);s=t*170000;display(s);flag=1;flag_0=1 ;SFRPAGE = old_SFRPAGE;}}elseif(flag_0==1){old_SFRPAGE = SFRPAGE;SFRPAGE=0x00;TL1=0;TH1=0;SFRPAGE = old_SFRPAGE;n0=0;flag_0=0;flag=0 ;}}}6.测量结果图为LCD液晶屏显示的身高测量值。
基于STM32单片机的多功能智能盲人拐杖设计

基于 STM32 单片机的多功能智能盲人拐杖设计摘要:针对盲人出行安全问题,设计一款解决盲人出行困难的智能拐杖。
本设计以 STM32 单片机为控制核心,结合当前先进且较为成熟的信号处理算法、传感器技术、无线通信技术,通过超声波模块进行广角测障利用语音播报模块报警,引导盲人及时规避障碍物。
同时采用 MPU6050 水平检测模块监测拐杖与地面的倾角,在出现突发情况时,不仅可以通过语音模块识别求救,还可以用短信的方式将GPS的实时定位位置发送给监护人。
此外,采用OPENMV 4进行机器视觉图像分析,使拐杖能对外界变动的信息做出应答,为盲人通过路况复杂的红绿灯路口提供保障。
现测试结果表明,整个系统性能稳定,灵敏度较高,操作方便,且功能易于扩展,能满足盲人出行的多方面需求。
关键词:盲人拐杖;红绿灯识别;超声波测距;跌倒报警项目名称:“无忧出行”智能盲人手杖装置设计,项目编号:202010214020,国家级大学生创新训练项目1概述针对盲人出行安全问题,现有的辅助盲人出行工具性能单一且无法普及,设计智能盲人手杖可以帮助更多盲人实现安全出行。
随着信息化社会的飞速发展,在基本满足了大众的物质需求后,人们也更加关注社会残障群体。
相比于正常人,残障人士的生活有诸多的不便,更需要社会对他们的理解与关注。
针对盲人出行安全问题,现有的辅助盲人出行工具性能单一且无法普及,设计了一款基于STM32单片机控制的集超声波测障、语音播报、红绿灯识别、短信报警、GPS定位等功能于一体的智能拐杖系统, 能够实时监测周边情况, 保护老人安全出行。
2系统总体设计单片机实时监控测距模块传送来的信号,对信号处理后,进行避障决策判断。
当检测到障碍物时,手杖自动报警(语音和机械振动双重模式)提示盲人避障。
同时,用图像分析技术识别并筛选外界信息,构造合理的内部控制逻辑,组建红绿灯决策功能,另外,还有一键求助和黑夜防撞等特色功能,进一步提高盲人出行安全系数。
常用超声波模块

常用超声波模块
常用超声波模块是一种常见的测距模块,它利用超声波的特性来测量物体与模块之间的距离。
这种模块广泛应用于机器人、智能家居、车辆避障等领域,成为了现代科技中不可或缺的一部分。
常用超声波模块的工作原理是利用超声波的回声时间来计算物体与模块之间的距离。
模块通过发射超声波,当超声波遇到物体时,会被反射回来,模块接收到反射回来的超声波后,通过计算回声时间来计算出物体与模块之间的距离。
这种测距方式具有精度高、反应快等优点,因此被广泛应用于各种领域。
常用超声波模块的特点是体积小、重量轻、功耗低、测距范围广等。
这种模块通常由超声波发射器、接收器、控制电路等组成,可以通过串口、I2C、SPI等接口与其他设备进行通信。
常用超声波模块的测距范围一般在2cm-4m之间,可以根据需要进行调整。
常用超声波模块的应用非常广泛,例如在机器人领域中,常用超声波模块可以用于机器人的避障、定位、导航等方面;在智能家居领域中,常用超声波模块可以用于智能门锁、智能灯光等方面;在车辆避障领域中,常用超声波模块可以用于车辆的自动避障等方面。
常用超声波模块是一种非常实用的测距模块,具有精度高、反应快、体积小、重量轻等优点,被广泛应用于机器人、智能家居、车辆避障等领域。
随着科技的不断发展,常用超声波模块的应用范围也将
越来越广泛。
超声波模块的工作原理

超声波模块的工作原理
超声波模块是一种利用超声波进行测距的设备。
它由超声波发射器和接收器组成,工作原理如下:
1. 发射超声波:超声波发射器通过电信号驱动压电陶瓷片振动产生超声波。
超声波的频率通常在20kHz到200kHz之间。
2. 超声波传播:发射的超声波以球面波的形式向四面八方扩散传播。
超声波在空气中传播速度约为340m/s。
3. 接收超声波:超声波接收器也是一个压电陶瓷片,当超声波碰到物体并被反射回来时,接收器会将接收到的超声波转化为电信号。
4. 信号处理:接收到的电信号会经过放大、滤波、模数转换等处理,以便后续的距离计算和数据分析。
5. 距离计算:根据发射超声波到接收超声波的时间间隔,可以计算出超声波从发射到接收的时间差。
再根据超声波在空气中的传播速度,可以将时间差转换为距离。
6. 输出结果:最终,超声波模块会输出测量得到的距离信息,一般以数字信号或模拟电压输出。
超声波模块的工作原理可应用于测距、障碍物检测、物体定位等场景,在工业、机器人、智能家居等领域有广泛的应用。
超声波跟随小车
2018年全国大学生电子设计竞赛超声波跟随小车2018年5月19日摘要设计是以stc单片机为主控制器,然后再结合超声波测距的原理,实现智能小车的实时跟随控制。
超声波的发射模块由单片机来控制时序,然后往前方发散从而寻找需要定位的节点并且会通过超声波信号与射频信号间的时间差计算发射点与需要定位节点间的距离。
根据小车与障碍物距离的长短确定小车的运行。
关键词:超声波;测距目录一、系统方案 (1)1、超声波模块的论证与选择 (1)2、电机的论证与选择 (1)3、电机驱动模块的论证与选择 (1)4、控制系统的论证与选择 (2)5、电源 (3)二、系统理论分析与计算 (3)1、测距的分析与计算 (3)2、跟随的分析与计算 (4)三、电路与程序设计 (4)1、电路的设计 (4)(1)系统总体框图 (4)2、程序的设计 (4)(1)程序功能描述与设计思路 (4)(2)程序流程图 (5)四、测试方案与测试结果 (5)1、测试方案 (5)2、测试条件与仪器............................................................................... 错误!未定义书签。
3、测试结果及分析 (5)(1)测试结果(数据) (5)(2)测试分析与结论 (6)五、结论与心得 (6)六、参考文献 (6)附录1:电路原理图 (7)附录2:源程序 (8)超声波跟随小车【专科组】一、系统方案本系统主要由超声波模块、电机驱动模块、系统控制模块、电源模块组成,下面分别论证这几个模块的选择。
1、超声波模块的论证与选择方案一:HC-SR04HC-SR04超声波测距模块可提供2cm-400cm的非接触式距离感测功能,测距精度可达高到3mm;模块包括超声波发射器、接收器与控制电路。
方案二:US-100US-100 超声波测距模块可实现 0~4.5m 的非接触测距功能,拥有 2.4~5.5V 的宽电压输入范围,静态功耗低于 2mA,自带温度传感器对测距结果进行校正,同时具有 GPIO,串口等多种通信方式。
新一代盲人智能导航系统的设计与实现
新一代盲人智能导航系统的设计与实现作者:苗琳琳鹿馨云曹光辉来源:《科技资讯》2018年第17期摘要:本文以盲人新一代导航系统为背景,通过应用超声波传感器、蜂鸣报警器、语音播报器、光敏传感器等众多传感设备,设计了基于51单片机智能盲人导航系统。
该导航系统主要实现对盲人前进路上障碍物进行分段距离提醒以及夜间照明功能。
为新一代盲人导航系统的产业化提供一种新思路和新方向。
关键词:51单片机语音播报器超声波传感器光敏传感器中图分类号:TN91 文献标识码:A 文章编号:1672-3791(2018)06(b)-0003-02城市化的高速发展在给人们带来便利的同时,也为残疾人,尤其是盲人带来了诸多不利。
传统意义上,盲人出行主要依靠单一手杖和盲道的方式将不在适用。
与此同时,物联网技术的迅猛发展,使得利用相关传感器设计新一代盲人导航设备成为可能。
在此背景下,本文设计与实现了基于51单片机智能盲人导航系统。
1 智能盲人导航系统整体框架51单片机接收光敏传感器传来的光强信息,当光线强度高于或等于设定阈值时,采用白天导航策略;当光线强度低于设定阈值时,采用夜间导航策略。
整体框如图1所示。
1.1 白天导航策略白天导航策略主要采用接力式预警、报警方案。
利用超声波测距模块探测障碍物的位置信息,测量盲人与障碍物之间的距离,当障碍物和盲人距离小于3m时,蜂鸣报警器响起,同时距离越小,蜂鸣器警音越急促;当障碍物和盲人距离小于0.8m时,语音模块发出预警,提示用户及时避让,保护盲人行走时的安全问题。
1.2 夜间导航策略夜间导航策略是在白天导航策略的基础上增添了夜间照明功能。
夜间照明系统实现的思路是,当单片机从光敏传感器中接收到的外界光强低于设定阈值时,单片机驱动继电器,进而点亮LED等,从而为盲人提供存在性保护。
2 硬件系统的实现导航系统主要包括超声波测距传感器、蜂鸣器、语音播报模块、光敏传感器等。
2.1 超声波测距传感器测距是盲人导航系统中关键且核心的一步。
高中物理中超声波测距的实验设计
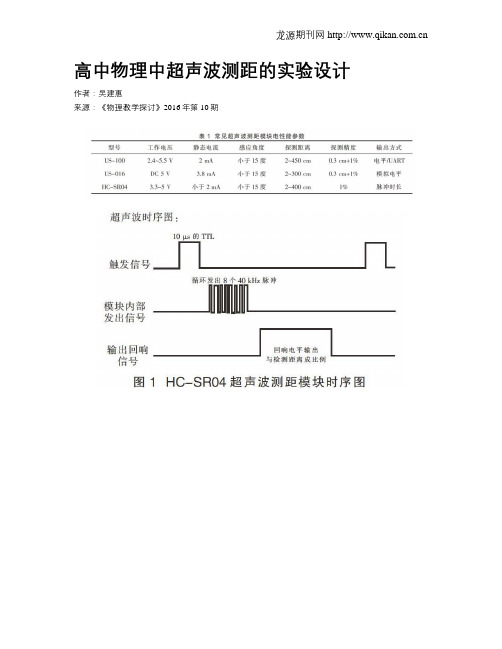
高中物理中超声波测距的实验设计作者:吴建惠来源:《物理教学探讨》2016年第10期摘要:依据高中物理课程标准和教材的要求,通过技术创新和方案创新,采用Arduino 开源创新平台和超声波测距模块,自主开发数字化测距实验系统,弥补传统实验器材的缺陷,实现了“精确简捷”的数据采集,实验数据的“图形化”动态处理,为探究性物理实验提供支持。
关键词:超声波;Arduino;物理;数字实验室中图分类号:G633.7 文献标识码:A 文章编号:1003-6148(2016)10-0059-4当物体振动时会发出声音,科学家们将每秒钟振动的次数称为声音的频率,它的单位是赫兹(Hz)。
人类耳朵能听到的声波频率为20 Hz~20000 Hz。
因此,我们把频率高于20000赫兹的声波称为“超声波”。
超声波具有方向性好、穿透能力强、易于获得较集中的声能等特性,在测距、测速等方面具有广泛应用。
本文结合高中物理数字化实验开发实例,阐述如何利用Arduino平台实现超声波测距和数据采集,实现精确、直观、高效率的实验测量和数据处理。
1 超声波测距原理及方案对比超声波测距有两种常见方案,一种是人教版高中物理必修Ⅰ教材第23页所示的方案,把超声波发射器件和接收器件分别放置在所测距离的起点和终点,在红外线遥控器件辅助下计算超声波从起点至终点的时间Δt,再根据s=v*Δt求得距离。
另一种方案可称为“反射式”,是把超声波发射器件和接收器件并列安装在起点处,然后测得超声波从发射到经过终点反射回来被接受到的时间差Δt,再根据s=v*(Δt/2)求得距离。
方案一的测量精度较高,但实验较繁琐、使用也不便,方案二的测试时间是方案一的两倍、理论上误差也翻倍,但使用较为方便、所需模块也更易于购置。
因此,我们采用了方案二“反射式”测距方式。
常见的“反射式”超声波测距模块有SR系列、US系列等,表1是我们试用过的几种模块的电性能参数,看上去都属于民用产品,差别并不大,因此网上的超声波测距应用都采用了常见且廉价的HC-SR04模块。
US-100超声波测距模块解析

US-100超声波测距模块解析1. 简介US-100超声波测距模块是一种用于非接触式测量距离的模块,它可以通过发送超声波信号并接收其回波,根据回波时间计算物体与模块的距离。
US-100模块是HC-SR04模块的升级版,具有较高的精度和更全面的功能。
US-100超声波测距模块有四个引脚:VCC、Trig、Echo和GND。
其中,VCC和GND是电源引脚,Trig是发射引脚,Echo是接收引脚。
模块可以通过直接连接到Arduino等微控制器上进行使用。
2. 原理超声波是一种高频音波,其频率通常在20kHz以上。
US-100模块工作原理是,当Trig引脚发出一个10微秒的高电平信号时,模块内部会产生一次20kHz的超声波发射。
当超声波遇到物体后反射回来,回波会被Echo引脚接收到。
模块会将Echo引脚的电平变化转换成一个时间信号,并将此信号与回波时间进行比较从而计算出距离。
通过改变Trig引脚产生高电平信号的持续时间,我们可以控制超声波的发送距离和精度。
US-100模块可以设置不同的模式,以改变Trig信号的长度和测量单位等参数。
3. 使用方法接线:•VCC引脚接3.3V或5V电源•GND引脚接地•Trig引脚接Arduino的数字输出引脚•Echo引脚接Arduino的数字输入引脚代码:```c int trigPin = 2; int echoPin = 3; long duration, cm, inches;void setup() { pinMode(trigPin, OUTPUT); pinMode(echoPin, INPUT);Serial.begin(9600); }void loop() { digitalWrite(trigPin, LOW); delayMicroseconds(2);digitalWrite(trigPin, HIGH); delayMicroseconds(10); digitalWrite(trigPin, LOW); duration = pulseIn(echoPin, HIGH); cm = duration / 58; inches = duration / 148;Serial.print(cm); Serial.print(。
UP100(中文)

ULTRAPROBE® 100模拟型超声波检测仪1999年度工厂最佳产品提名SON-OF-A-GUN!超声波技术怎样为你工作?ULTRAPROBE® 100接收来自设备运转、泄漏和放电的高频声音,将其转化为电子信号,并通过“外差法”转化到人耳可听的声音频率范围,使用户可以通过耳机听到这些声音、观察仪表强度的变化。
“外差法”工作原理就如同一个收音机,可以准确地转换超声信号以便使用者辨别和理解。
超声波技术的优点是简单易懂,超声波是一个高频的短波信号。
和我们人类可听见的声音相比,超声波的波长是很小的。
这个特征具备以下优势:1. 超声波具有很强的方向性2. 超声波易于被阻塞或屏蔽3. 超声波仪器可以用于噪音环境4. 超声波提供早期潜在问题的预警5. 超声波仪器容易使用Ultraprobe 100 型号/配置根据您的应用,可以简单的找到合适的Ultraprobe 100型号UP100KT: ULTRAPROBE 100 全套包UP100手枪式主机(带有LED强度显示),8位灵敏度旋钮(0-70),电池低电量显示,扫描探头,橡胶聚焦头,接触式(听诊器)探头,超声波发生器(带充电器),轻型海绵衬里耳机,9伏碱性可更换电池,尼龙软包及综合操作说明书。
UP100SC: ULTRAPROBE 100接触式探头/扫描探头包UP100手枪式主机(带有LED强度显示),8位灵敏度旋钮(0-70),电池低电量显示,扫描探头,橡胶聚焦头,接触式(听诊器)探头,轻型海绵衬里耳机,9伏碱性可更换电池,尼龙软包及综合操作说明书。
UP100STG: ULTRAPROBE 100 扫描探头/超声波发生器包UP100手枪式主机(带有LED强度显示),8位灵敏度旋钮(0-70),电池低电量显示,扫描探头,橡胶聚焦头,超声波发生器(带充电器),轻型海绵衬里耳机,9伏碱性可更换电池,尼龙软包及综合操作说明书。
UP100C: ULTRAPROBE 100 接触式探头包UP100手枪式主机(带有LED强度显示),8位灵敏度旋钮(0-70),电池低电量显示,接触式(听诊器)探头,轻型海绵衬里耳机,9伏碱性可更换电池,尼龙软包及综合操作说明书。
超声波测距模块说明

最近做超声波测距,就是简单的测量引脚高电平的时间。
思路是这样的1.使用8MHZ时钟,不分频初始化Timerx_Init(235,1);//8Mhz的计数频率,计数到235为1cm距离2. PA0高电平时,打开定时器,测量时间while(PAin(0)){TIM3->CR1|=0x01; //使能定时器3}TIM3->CR1|=0x00; //关闭定时器3S=temp/2 //测量距离为总路程一半temp=0;//计数值清零3.计数到235时,产生中断,进入中断函数。
执行temp++操作void TIM3_IRQHandler(void){if(TIM3->SR&0X0001)//溢出中断{temp++;}TIM3->SR&=~(1<<0);//清除中断标志位}4.得出距离值S初学定时器,这样测距思路对吗实际测试后,S值一直为0,为什么超声波测距模块说明1.模块引脚从左到右(见图)模块引脚分别为:VCC、trig(控制端)、echo(接收端)、out(空脚)、GND2.主要技术参数:1:使用电压:DC5V2:静态电流:小于2mA3:电平输出:高电平VCC-0.2V 低<0.2V4:感应角度:不大于15 度5:探测距离:0.02m-5m6:探测精度:3mm(既然探测精度精确到毫米,就是说数据可以显示到毫米级,也就是四位数了!)板上接线方式:VCC、trig(控制端)、echo(接收端)、out(空脚)、GND。
OUT 脚为防盗模块时的开关量输出脚,测距模块不用此脚!3.使用方法:(1)采用IO 触发测距,给TRIG 至少10us 的高电平信号(实际上25us 最佳);此处通过IO口给一个高电平就行了。
(2)模块自动发送8 个40khz 的方波,自动检测是否有信号返回;(3)有信号通过ECHO 返回,ECHO 输出一高电平,高电平持续的时间就是超声波从发射到返回的时间.此处用定时器定时看看到底多长时间!这里要检测高电平信号,本产品使用方法简单,用单片机IO 口控制TRIG 发一个10us以上(25us最佳)的高电平,就可以在接收口(ECHO)等待高电平输出.当ECHO 从低变到高就可以开定时器计时,当ECHO 变为低电平时就可以读定时器的值,此时就为此次测距的时间,据公式:测试距离=(高电平时间*声速(340m/s))/2,方可算出距离.如此不断的周期测,就可以达到你移动测量的值了!在程序编写上应该注意的问题:第一个问题:基于SPI通信方式的一片74CH595驱动的四个数码管的显示的实现。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.概述
US-100超声波测距模块可实现
2cm~4.5m的非接触测距功能,拥有
2.4~5.5V的宽电压输入范围,静态功耗
低于2mA,自带温度传感器对测距结果
进行校正,同时具有GPIO(通用接口总线),串口等多种通信方式,内带看门狗,工作稳定可靠。
2.主要技术参数
3.本模块实物图及尺寸
本模块如图3.1和图3.2所示:
图3.1:US-100正面图
本模块的尺寸:45mm*20mm*1.6mm。
板上有两个半径为1mm的机械孔,如图3.3
所示:
图3.3:US-100尺寸图
4.接口说明
本模块共有两个接口,即模式选择跳
线和5 Pin接口。
模式选择跳线接口如图4.1所示。
模式选择跳线的间距为2.54mm,当插上跳线帽时为UART(串口)模式,拔掉时为电平触发模式。
图4.1:模式选择跳线接口
5 Pin接口为2.54mm间距的弯排针,如图4.2所示:
图4.2:5 Pin接口
从左到右依次编号1,2,3,4,5。
它们的定义如下:
1号Pin:接VCC电源(供电范围2.4V~5.5V)。
2号Pin:当为UART模式时,接外部电路UART的TX端;当为电平
触发模式时,接外部电路的Trig
端。
3号Pin:当为UART模式时,接外部电路UART的RX端;当为电平
触发模式时,接外部电路的Echo
端。
4号Pin:接外部电路的地。
5号Pin:接外部电路的地。
5.电平触发测距工作原理
在模块上电前,首先去掉模式选择跳线上的跳线帽,使模块处于电平触发模
式。
电平触发测距的时序如图5.1所示:
图5.1:US-100测距时序图
图5.1表明:只需要在Trig/TX管脚输入一个10US以上的高电平,系统便可发出8个40KHZ的超声波脉冲,然后检测回波信号。
当检测到回波信号后,模块还要进行温度值的测量,然后根据当
前温度对测距结果进行校正,将校正后
的结果通过Echo/RX管脚输出。
在此模式下,模块将距离值转化为340m/s时的时间值的2倍,通过Echo
端输出一高电平,可根据此高电平的持
续时间来计算距离值。
即距离值为:(高电平时间*340m/s)/2。
注:因为距离值已经经过温度校正,此时无需再根据环境温度对超声波声速
进行校正,即不管温度多少,声速选择
340m/s即可。
6.串口触发测距工作原理
在模块上电前,首先插上模式选择跳线上的跳线帽,使模块处于串口触发模
式。
串口触发测距的时序如图6.1所示:
在此模式下只需要在Trig/TX管脚输入0X55(波特率9600),系统便可发出8个40KHZ的超声波脉冲,然后检测回波
信号。
当检测到回波信号后,模块还要
进行温度值的测量,然后根据当前温度
对测距结果进行校正,将校正后的结果
通过Echo/RX管脚输出。
输出的距离值共两个字节,第一个字节
是距离的高8位(HDate),第二个字节
为距离的低8位(LData),单位为毫米。
即距离值为(HData*256 +LData)mm。
串口触发测距时序图
7.串口触发测温工作原理
在模块上电前,首先插上模式选择跳线上的跳线帽,使模块处于串口触发模式。
串口触发测温的时序如图7.1所示:
在此模式下只需要在Trig/TX管脚输入0X50(波特率9600),系统便启动温度传感器对当前温度进行测量,然后将温度值通过Echo/RX管脚输出。
测量完成温度后,本模块会返回一个字节的温度值(TData),实际的温度值为TData-45。
例如通过TX发送完0X50后,在RX端收到0X45,则此时的温度值为[69(0X45的10进制值)-45] = 24度。
图7.1:串口触发测温时序图
可搭配本店超声波测距模块开发板。