模糊指派多目标工程选址
模糊多目标决策方法与应用

模糊多目标决策方法与应用在实际决策问题中,往往存在多个目标需要考虑。
然而,这些目标之间往往存在相互制约和矛盾的情况,使得决策变得复杂和困难。
为了解决这一问题,模糊多目标决策方法应运而生。
本文将介绍模糊多目标决策的基本原理和常见方法,并探讨其在实际应用中的作用。
一、模糊多目标决策的基本原理模糊多目标决策是在模糊集合理论的基础上进行的。
模糊集合理论是指对于某一现象或问题,根据相关信息和数据建立一个数学模型,用以描述该现象或问题的各个方面。
在模糊集合理论中,每个方面都可以用一个具有一定隶属度的模糊集合来表示,隶属度越高表示该方面的重要性越大。
在多目标决策中,我们要考虑多个决策因素,每个因素都有相应的目标。
然而,这些目标之间往往存在矛盾和制约。
例如,在投资决策中,我们既要追求高收益,又要降低风险;在环境保护中,我们既要保护自然资源,又要实现经济发展。
这些目标之间往往难以调和和平衡,因此需要一种方法来进行决策。
模糊多目标决策的基本原理是将各个目标进行模糊化处理,得到各个目标的隶属度函数。
然后,根据隶属度函数计算出各个目标的权重,并将这些权重用于决策过程中的评价和排序。
最后,根据这些评价和排序结果进行决策,从而实现多目标的平衡和协调。
二、常见的模糊多目标决策方法1. 模糊层次分析法(FAHP)模糊层次分析法是一种常用的模糊多目标决策方法。
该方法将目标层次化,将多个目标划分为不同层次,并通过对比判断确定权重。
首先,构建目标层次结构,将目标划分为上下级关系。
然后,利用模糊数学方法对层次结构进行建模,并确定各层次之间的权重。
最后,根据权重计算出各个目标的综合评价值,从而进行决策。
2. 模糊TOPSIS方法TOPSIS方法是一种常用的决策方法,可以用于解决多目标决策问题。
在模糊TOPSIS方法中,首先将决策问题转化为矩阵形式。
然后,根据模糊集合理论,用模糊矩阵表示决策因素的隶属度函数。
接下来,根据隶属度函数计算出正理想解和负理想解,并计算出各个候选解与正理想解和负理想解的距离。
多目标模糊决策理论在混凝土坝砂石骨料场方案优选中的应用
多 目标模 糊决策理论在混凝 土坝
砂 石骨 料 场 方 案优 选 中 的应用
李 捷 , 克 斌 ,孙 启 冀 侍
805) 30 2 ( 疆 农 业 大 学 水 利 与 土木 工 程学 院 , 鲁 木 齐 新 乌
摘 要 : 针 对 砂 石 骨 料 场 方 案 优 选 中所 涉 及 的 因 素 多 而 繁 琐 的 问 题 , 行 系 统 的 分 析 , 分 考 虑 定 性 和 定 量 指 进 充 标 , 数 量 、 量 、 术 、 保 、 益 指 标 出发 , 出 了 料 场 方 案选 址 的 多 目标 模 糊 优 选 模 型 。算 例 表 明 . 出 的 模 型 从 质 技 环 效 提 提 是 切 实 可行 的 , 有 一 定 的推 广 应 用 价 值 。 具 关 键 词 : 混 凝 土 坝 ;施 工 组 织 设 计 ; 石 骨 料 场 ;方 案 优 选 ;多 目标 模 糊 优 选 ;混 合 整 数 规 划 砂
题之 一 。
领域 。现有 的 成果 ] 对布 置 中或 多或 少 地带 有 不
确 定性 一 模糊 性 的 因 素有 所 提 及 , 欠 缺运 用 模 一 但 糊数 学相 关理 论应 用 , 然 就 多 目标 模 糊 优 选 理论 虽
以往 对料 场 的规 划 和 优选 , 的从 理 论 上 提 出 有
tv u z tmia i n;m i e n e e o a i e f z y op i z to x d i t g rpr gr mmi ng
混凝土 坝施 工 中砂 石 骨 料 需 用 量很 大 , 因此 施 工组织 设计 中砂 石料 场选 址是需 要解 决好 的关 键 s r c : Th ic la e uspr l ms c c r e n o i u d sgn ofs n t ne d g e a e ya d ofc n— e m s e l n o ob e on e n d i ptm m e i a ds o a gr g t r o c e e d m r y t ma ia l n l z d, h a i u lc s d r ton o he q nl a i n u ntt — r t a we e s s e tc ly a a y e on t e b ss off l on i e a i ft ua i tve a d q a ia t
基于模糊聚类算法的多配送中心选址优化方法
t e s l s a u 4 Th pe ai n c n d v d e c d d t sib to e tr n o f u l tr h mal tv l e 2. 3. e o r to a i i e t a i ae dit u i n c n e s it o rcuse s e h n l a d e e tt e d s iut n c n e O a i n i a h cuse n s lc h it b i e t rl C to n e c l tr.ma i g t e l c to e u t e s n bl nd r o k n h o ai n r s lsr a o a e a
i tr a u be ro t e r e f n to e o sa o t d t n e r t h rtrai de n o t e frt n e v ln m rp r y d g e u c i n m t d i d p e o i t g a et e c e n x i t is i i h i i h
b s d o u z l s e i g a g rt m a e n f z y cu t r n l o ih
Ma a u W agYog H n e YuH g H i oH i n j n n agW n a eJ n e
( co l f rnpr t n S u es Unvrt N nig20 9 , hn ) S ho Ta sot i ,ot at iesy, aj 10 6 C ia o ao h i n
a d t e l c t nsa u n iis o iti t n c n e s ae d tr i e n o a o nd q a tte f d srbui e tr r ee m n d. Th e u t fa p lc t n h i o e r s ls o n a p ia o i e a p e s o t a e h e x m l h w twh n t e m mbe s i u c i n v l s0. 4 h rh p f n to aue i 7 0 2,t e c u trng v ld t n e e s h l se i ai iy i d x g t
基于多目标模糊决策理论的工程项目设计方案决策
.
1 o由此可得 到规范化决策矩阵 R: ㈦,
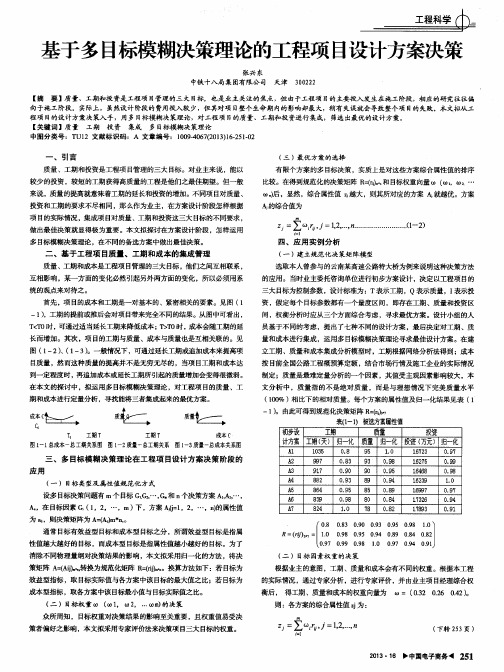
表( 卜 一 1 )被 选方案 属 性值 初 步设 工 期 质量 投 资 计 方案 工 期( 天) 归 一化 质量 归 一化 投 资( 万元) 归一 化
^ 1 1 0 3 5 9 9 7 O . 8 0 . 8 3 9 5 9 3 1 . 0 0 . 9 8 1 6 7 2 3 1 6 2 7 5 0 . 9 7 0 . 9 9 A 2
基于多 目标模糊决策理论的工程项 目设计方案决策
张 兴 东
中铁十八局 集团有 限公 司 天津
3 0 0 2 2 2
【 摘 要 】质量、工期 和投 资是 工程 项 目管理 的三 大 目 标 ,也是业主 关注的焦点 , 但 由于工程项 目的主要投入发生在施工阶段 ,相应的研究往往偏 向于施 工阶段 。实际上,虽然设计 阶段 的费用投入较 少,但其对项 目整个生命期 内的影响却最大,稍有失误就会导致整个项 目的失败 。本文拟从工 程项 目的设计 方案 决策入手 ,用 多 目 标模糊决策理论 ,对工程项 目的质量 、工期和投 资进行集成,筛选 出最优 的设计方案。 【 关键词 】质量 工期 投 资 集成 多 目 标模糊决策理论
工期 T
成本c
图1 -1 总成本一总工期关系圉 圈 1 -2 质量一总工期关系 圈 1 - 3 质量一 总成本关系图
三、多 目标模糊决策理论在 工程项 目设计 方案决策阶段的
应 用
( 一 )目标 类 型 及 属 性值 规 范化 方 式
A 3
A 4 A 5
9 1 7
8 8 2 8 6 4 8 3 9
有限个 方案 的多 目 标决策,实质上是对这些方案综合属性值的排序 比较 。在得 到规范化 的决策矩阵 R = ㈤ 和目 标权重向量 m ( t o ,m … m 后 ,显然 ,综合属性值 越大 , 则其所对应 的方案 A就越优 。方案 A 的综合值为
模糊层次分析法对物流配送中心选址决策评价
模糊层次分析法是对层次分析法和模糊综合评价法的综合, 使其 更能反映实际决策思想, 在模糊集的从属度计算与权重的确定方面更 加符合实际。在体系评价、 效能评估、 系统优化等方面有着广泛的应
用, 是一种定性 与定量相结合 的评价模 型 , 一般 是先用层 析分析法 确 定因素集, 然后用模糊综合评判确定评判效果 。模糊法 是在 层次法之
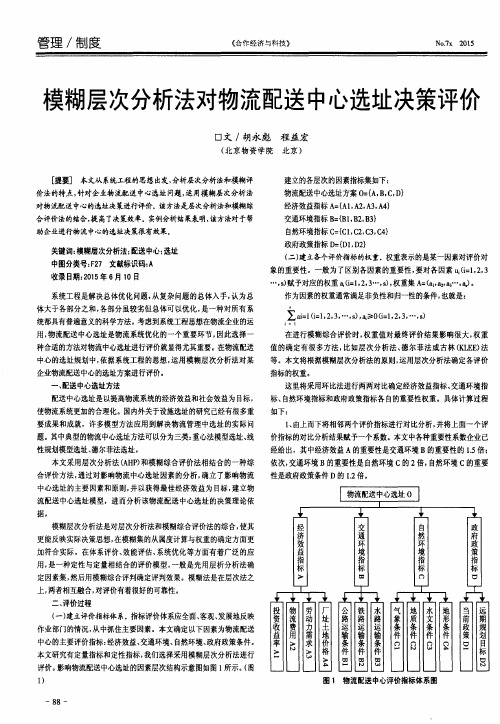
本文采用层次分析法 ( A H P ) 和模糊综合评价法相结合的一种综 合评价方法, 通过对影响物流中心选址因素的分析, 确立了影响物流
中心选址的主要 因素和原则 , 并 以获 得最佳经济 效益为 目 标, 建立 物 流配送 中心选址模 型,进而分析 该物 流配送 中心选址 的决策理论 依
据。
3 、 计算所有评价指标修正后的重要性系数的总和为 8 . 2 , 分别用 各评价指标的修正重要性系数除以修正重要性系数总和, 即得到各个 评价指标的重要性权重。 经过计算可得四个评价指标的权重为: F = ( O . 4 4 , 0 . 2 9 , O . 1 5 , O . 1 2 ) 同理, 运用环比法可以求得下一层指标的权重。 ( 三) 建立评价指标的评价集。 本文将各评价因素的评价集划分为
性规划模型选址、 德尔菲法选址 。
1 、 由上而下将相邻 两个评 价指标进行对 比分析 , 并将上面 一个评
价指标的对比分析结果赋予一个系数。 本文中各种重要性系数企业已 经给出,其中经济效益 A的重要性是交通环境 B的重要性的 1 . 5倍; 依次, 交通环境 B的重要性是自然环境 C的2倍, 自然环境C的重要 性是政府政策条件 D的 1 . 2 倍。
作为因素的权重通常满足非负性和归一性的条件, 也就是:
s
体大于各部分之和, 各部分虽较劣但总体可以优化, 是一种对所有系
模糊多属性决策在多目标跟踪目标优选中的应用
多属性决策方法证实 了指标 体系和权重确定的正确性 。 能有效 地提高水下声 自导系统 的作 战效 能。
关键 词 : 目标 跟 踪 ; 多 目标 优 选 ; 糊 多 属 性 决 策 ; 合 评 价 模 综
。
Байду номын сангаас
e fce y oft e w e p n. fiinc h a o
Ke r s mu t t r e s ta ig;t r e o o st r u z li l trb t e ii n ma i g;c m p e e sv v l a i n y wo d : li a g t r c n - a g tc mp i f z y mu t e a t i u e d c s k n o p o o r h n ie e au t o
维普资讯
・
36 2 ・
弹 箭 与 制 导 学 报
模糊 多属性决策在 多 目标跟踪 目标 优选中的应用
王 百合 , 建 国 , 黄 张群 飞
( 西北 工 业 大 学航 海 学 院 安 7 0 7 ) 西 l 0 2
? 、
I …
d o.a a y e h a t r f c e a g t o o st r r p s s t e g i e i es s e a d c n ims t e we g t fe e y fc n l z st e f c o sa f t d t r e mp i ,p o o e h u d l y t m n o f e c o n r h i h v r a — o t t n e tf s t ec r e t e s wi h t o s o li l trb t e iin ma i g o .a d t s ii h o r c n s t t eme h d f e h mu t e a t i u e d cso k n .Th sme h d c n i r v h p i t o a mp o e t e
模糊理论在多目标优化问题求解中的应用
模糊理论在多目标优化问题求解中的应用摘要:本文结合多目标优化问题模型的特点,提出了一种基于模糊理论的多目标优化算法。
同时与目前常用的几种多目标规划问题的求解方法作一比较,结果表明,本文所提多目标模型比单目标具有更好的综合优势,算法快速可靠。
关键词:多目标优化模糊优化引言随着工程问题日益的复杂化,传统的、确定性的单目标优化问题已不能满足实际要求,在工程技术、生产管理以及国防建设等部门中,所遇到的问题往往需要同时考虑多个目标在某种意义下的最优化问题,像这种含有多个目标的最优化问题称为多目标优化问题,亦称多目标决策。
多目标优化要求各个分目标都达到最优,这是比较理想的事情,但是比较困难,不能期望各分目标函数的最优点都重叠在一起,即同时达到最优解,有时甚至会产生完全对立矛盾的情况。
这就需要各个分目标函数在最优解之间进行“协调”,以致得到整体最优方案。
目前寻求满意解的方法很多,大体上可归纳为两大类,一类是基于向量优化理论和效用理论的大系统多目标多模型递阶分析法。
另一类是基于模糊集理论和模糊优选决策理论的多阶段多层次多目标模糊优选法[1]。
这两类方法都是在问题非劣解集中通过对有限个方案的比较筛选来优选方案,其前提是首先要形成只包含有限个方案的非劣解集。
但在实际中,有些问题的非劣解并非是有限的,难以列出全部非劣解。
因此,基于单目标最优解模糊化基础上的多目标模糊优化方法似乎更受到决策者的欢迎。
该方法可以反映各个单目标最优解和多目标满意解之间的相互关系,能较好地考虑不同性质的、相互矛盾的多个目标的满意程度,在综合考虑各目标的条件下,寻求一合适的优化方案,使各个目标都尽可能处于较优状态,为解决多目标系统优化问题提供了新的途径。
一、多目标优化含有多个目标的最优化问题称为多目标优化问题,亦称多目标决策。
由于求最大都可转化为求最小,所以多目标最优化问题的一般形式为:或者记作:当p=1 时,式(1.1)和式(1.2)就是非线性规划,称为单目标规划。
多目标模糊决策在软土地基加固方案中的应用
一
() 6
口 I
5 模 糊 综 合评 定 )
— 一 m a
一一 v 一
口
k 1
k B = W =
( i= 1 2 … , ; = 1 2, , ,, m , … n)
;
_一 一一
=
() 7
m 其 中 表 示第 个 加 固方 案 的第 i 评 价 因素 的指标 个
析。
关键 词 : 土地 基加 固 软
影响 因素
权重
模 糊 综合 评价
中 图分 类号 :U 7 . 文献标 识 码 : T 4 18 A 解 决 软土 地基 加 固方 案 中影 响因素 的不 确定性 和主观
0 前 言
方案 本 身就 是 一个 众 多 因素 构成 的复 杂 系统 , 方 案优 选过 程 也 就 是 对 系 统 进 行 综 合 评 判 的过 程 。首 先, 必须 确定 软 土地基 加 固方案 , 从影 响加 固方 案 的各 种 因素 中进 行 综合 分 析 , 各 种 影 响 因素 具 有 不 同的 但
0 1 0 .5
都 起到 了 显著 的作 用 , 机 械 成孔 有 一 定 的 局 限 性 。 但
7 注 意事 项
1在 既有 线 上 施工 , ) 必须 保 证 在 停止 作 业 无 人 看 护 的情况 下 , 施工机 械下道 , 将 不得 搁置 在路 肩上 。 2 机 械 施工 的条 件有 一 定 的 局 限性 , 于其 特 定 ) 由
在 既有 线上 施工 , 合理 调整 、 织机 械施 工 和人工 施 应 组 工 的分 配 , 以便更 有 效地 提高生 产效 率 。
收 稿 E期 :06—1 0 t 20 0—1
多目标模糊识别优化决策理论与应用研究共3篇
多目标模糊识别优化决策理论与应用研究共3篇多目标模糊识别优化决策理论与应用研究1多目标模糊识别优化决策理论与应用研究随着社会发展和科技进步,人们面对的问题越来越复杂和多样化,不同领域的决策问题也变得越来越多元化。
传统的决策理论和方法往往只能够解决单一目标的问题,而无法很好地应对存在多个相互关联目标的问题。
因此,多目标模糊识别优化决策理论及其应用研究已经成为一个热门的研究领域。
多目标模糊识别优化决策理论的核心是将模糊识别技术和优化方法相结合,通过建立多目标模型来解决决策问题,以提高决策的科学性和有效性。
该理论的研究对象为存在多个决策目标的问题,这些目标往往是相互矛盾和相互制约的,需要通过合理的权衡和平衡来实现最优决策。
多目标模糊识别优化决策理论的实质是建立一个多目标决策模型,并通过模糊识别方法进行问题描述和分析,然后采用优化方法寻找最优解。
该理论的创新点在于:一是将模糊识别方法与优化方法相结合,能够更好地处理决策问题中的不确定性和复杂性;二是将单一目标的决策方法转化为多目标优化决策方法,能够更好地满足实际决策问题中的需求。
基于多目标模糊识别优化决策理论,研究者们开展了大量的研究工作,并取得了不少的应用成果。
例如,在环保领域,研究者们采用该理论,建立了一个环保评价模型,通过模糊综合评判和多目标优化方法,评价环保项目各项指标,综合考虑环保效益、成本、社会效益等多个因素,以得出最佳环保方案。
在金融领域,研究者们利用该理论,建立了一个多目标的银行风险评估模型,能够综合评估银行的资产质量、流动性、盈利能力等多个指标,并提供最优的风险控制策略。
综上所述,多目标模糊识别优化决策理论及其应用研究已成为一个十分重要的研究领域,拥有广泛的应用前景和发展潜力,能够在实际问题决策中为决策者提供有力的决策支持。
未来,我们需要进一步深化理论探讨,扩大应用范围,以更好地服务社会经济发展和人民群众生活综上所述,多目标模糊识别优化决策理论在实际应用中具有广泛的应用前景和发展潜力,能够为各行各业的决策者提供有力的决策支持。
多目标模糊决策的Vague集方法

2004年5月系统工程理论与实践第5期 文章编号:100026788(2004)0520103206多目标模糊决策的V ague集方法刘华文(山东大学数学与系统科学学院,山东济南250100)摘要: 对模糊条件下的多目标决策问题,采用V ague集方法进行处理,提出三种目标选择方法:记分函数法、加权记分函数法和距离法.对已有的V ague集方法进行了分析与联系,并通过例子阐明本文方法的有效性和优越性.关键词: 多目标模糊决策;记分函数;距离;V ague集;模糊集;直觉模糊集中图分类号: O159;T P18 文献标识码: A V ague Set M ethods of M u lticriteria Fuzzy D ecisi on M ak ingL I U H ua2w en(Schoo l of M athem atics&System Sciences,Shandong U n iversity,J i’nan250100,Ch ina)Abstract: Based on vague set theo ry,th ree m ethods handling m u lticriteria fuzzy decisi on2m ak ing p rob2lem s are p rovided.T hey are called sco re functi on m ethod,w eigh ted sco re functi on m ethod and distancem ethod.M o reover,w e analyze the p resen t m ethods connected w ith vague sets and show by examp lesthat the m ethods p resen ted in th is paper are mo re efficien t and advan tageou s.Key words: m u lticriteria fuzzy decisi on m ak ing;sco re functi on;distance;vague set;fuzzy set;in tu2iti on istic fuzzy set1 引言Gau和B ueh rer于1993年提出的V ague集[1]是Zadeh模糊集[2]的一种推广形式,它等同于A tanassov提出的直觉模糊集[3].V ague集概念的特点是同时考虑隶属与非隶属两方面的信息,这使得V ague集在处理不确定性信息时比传统的模糊集有更强的表示能力,且更具灵活性.Chen和T an[4]将V ague集应用于模糊条件下的多目标决策问题,利用记分函数与加权记分函数给出决策.Hong和Cho i[5]以及国内学者李凡等[6,7]分别对Chen和T an的方法进行分析,针对其不足之处给出一系列修改形式.本文在以上工作的基础上,基于V ague集定义本身的特殊形式及其直观解释,提出一系列新的目标选择方法——记分函数法、加权记分函数法和距离法.通过比较阐明该方法有较强的选择能力,且所得结果符合人们的直觉.2 Vague集的概念及运算定义2.1[1] 设论域U={u1,u2,…,u n},其中元素u i(i=1,2,…,n)是所讨论的对象(以下同).U上一V ague集A由真隶属函数t A和假隶属函数f A所描述:t A:X→[0,1],f A:X→[0,1].其中t A(u i)是由支持u i的证据所导出的肯定隶属度的下界,f A(u i)则是由反对u i的证据所导出的否定隶属度的下界,且t A(u i)+f A(u i)Φ1.元素u i在V ague集A中的隶属度ΛA(u i)被区间[0,1]的一个子区间[t A(u i), 1-f A(u i)]所界定,称该区间为u i在A中的V ague值,记作v A(u i).对V ague集A,当U离散时,记为A=6n i=1[t A(u i),1-f A(u i)] u i,u i∈X;当U连续时,记为A=收稿日期:2003204226作者简介:刘华文(1964-),副教授,博士生,研究方向:模糊集合论,模糊决策与识别,hw.liu@∫U[t A(u),1-f A(u)] u,u∈U.Πu∈U,称ΠA(u)=1-t A(u)-f A(u)为u相对于V ague集A的V ague度,它刻画了u相对于V ague 集A的踌躇程度,是u相对于A的未知信息的一种度量.ΠA(u)值越大,说明u相对于A的未知信息越多.显然,0ΦΠA(u)Φ1.由上可知,u相对于A的隶属情况应具三维表示(t A(u),f A(u),ΠA(u)).对V ague集的解释:例如设v A(u)=[0.5,0.8],则t A(u)=0.5,f A(u)=1-0.8=0.2,ΠA(u)=1-t A(u)-f A(u)=0.3,此时可解释为:元素u属于A的程度是0.5,不属于A的程度是0.2,u对A的犹豫程度是0.3.用投票模型来解释为:赞成5票,反对2票,弃权3票.以下给出V ague值及V ague集的运算与关系.定义2.2 设V ague值x=[t x,1-f x],y=[t y,1-f y],其中t x,f x,t y,f y∈[0,1]且t x+f xΦ1,t y+f y Φ1.定义V ague值的运算与关系如下:x∧y=[m in(t x,t y),m in(1-f x,1-f y)],x∨y=[m ax(t x,t y),m ax(1-f x,1-f y)],{x}′=[f x,1-t x],xΦyα]t xΦt y&f xΕf y,x=yα]t x=t y&f x=f y. 定义2.3 设论域U={u1,u2,…,u n},A,B为U上的两V ague集,其中A=6n i=1[t A(u i),1-f A(u i)] u i, B=6n i=1[t B(u i),1-f B(u i)] u i定义V ague集的运算与关系如下:A∩B=6n i=1{[t A(u i),1-f A(u i)]∧[t B(u i),1-f B(u i)]} u i,A∪B=6n i=1{[t A(u i),1-f A(u i)]∨[t B(u i),1-f B(u i)]} u i,A′=6n i=1[f A(u i),1-t A(u i)] u i,AΑBα]t A(u i)Φt B(u i)&f A(u i)Εf B(u i),Πu i∈U,A=Bα]t A(u i)=t B(u i)&f A(u i)=f B(u i),Πu i∈U.3 基于Vague集的多目标决策方法本段中给出基于V ague集的多目标决策方法:记分函数法、加权记分函数法和距离法,同时与现有方法进行比较,阐明所给方法的有效性和优越性.3.1 记分函数法多目标模糊决策问题:设A={A1,A2,…,A m}为决策目标集,C={C1,C2,…,C n}为约束条件集,并假设决策目标A i在约束条件C下的特征由以下V ague集表示:A i={(C1,[t i1,1-f i1]),(C2,[t i2,1-f i2]),…,(C n,[t in,1-f in])}其中t ij表示决策目标A i满足约束条件C j的程度,f ij表示决策目标A i不满足约束条件C j的程度.假设决策者要在决策目标集A中选择一个目标同时满足约束条件C j,C k,…,C p或者满足约束条件C s,即决策者的要求为:C j and C k and…and C p or C s.决策目标A i满足与不满足该要求的程度由评价函数E表示为:E(A i)=([t ij,1-f ij]∧[t ik,1-f ik]∧…∧[t ip,1-f ip])∨[t is,1-f is]=[t Ai ,1-f Ai]其中,t Ai =m ax(m in(t ij,t ik,…,t ip),t is),401系统工程理论与实践2004年5月1-f A i =m ax (m in (1-f ij ,1-f ik ,…,1-f ip ),1-f is ).对评价值E (A i )=[t A i ,1-f A i ],用投票模型解释为:赞成票所占比例数为t A i ,反对票所占比例数为f A i ,弃权票所占比例数为ΠA i =1-t A i -f A i.Chen 和T an [4]用记分函数S 表示目标A i 满足决策者要求的程度:S (E (A i ))=t A i -f A i(1)并指出S (E (A i ))的值越大,目标A i 越满足决策者的要求.Hong 和Cho i [5]分析公式(1)的不足之后,追加精确函数H :H (E (A i ))=t A i +f A i (2)以表示V ague 值E (A i )所反映出的隶属情况的精确度.李凡等[6,7]用例子阐明公式(1)的弊端之后,给出的方法是定义两个记分函数S 1和S 2:S 1=t A i ,S 2=1-f A i或S 1=t A i -fA i,S 2=1-f A i(3)来表示目标A i 适合和不适合决策者要求的程度.决策规则为:先根据S 1的值进行选择,该值越大,则目标A i 越适合决策要求;当S 1的值相同时,再根据函数S 2的值进行选择,该值越大,则目标A i 越适合决策要求.现在对评价值E (A i )所反映出的弃权部分进行分析.考虑到弃权人群中可能有一部分人倾向投赞成票,有一部分人倾向投反对票,另一部分人仍倾向弃权.所以我们可以对弃权部分ΠA i 按投票结果细化成三部分:t A i ΠA i ,f A i ΠA i ,(1-t A i -f A i )ΠA i ,分别表示弃权中倾向投赞成票、反对票和弃权票的比例.于是,可定义如下记分函数L (E (A i ))=t A i +t A i (1-t A i -f A i )(4)表示决策目标A i 满足决策者要求的程度.L (E (A i ))的值越大,表示目标A i 越满足决策者的要求.当1-t A i -f A i =0时,记L (E (A i ))=(L (E (A i )))+,比如L ([0.6,0.6])=0.6+.若有L (E (A 1))=0.6,L (E (A 2))=0.6+,则认为0.6<0.6+,即目标A 2优于A 1.例3.1 设两组决策目标集A ={A 1,A 2,A 3,A 4,A 5},B ={B 1,B 2},约束条件集C ={C 1,C 2,C 3},决策目标A i (i =1,2,3,4,5)及B j (j =1,2)在约束条件C 下的特征由以下V ague 集表示:A 1={(C 1,[0.2,0.8]),(C 2,[0.3,0.9]),(C 3,[0.2,1])},A 2={(C 1,[0.3,0.7]),(C 2,[0.2,0.8]),(C 3,[0.3,0.9])},A 3={(C 1,[0.4,0.6]),(C 2,[0.5,0.6]),(C 3,[0.3,0.8])},A 4={(C 1,[0.5,0.7]),(C 2,[0.4,0.6]),(C 3,[0.5,0.7])},A5={(C 1,[0.4,0.6]),(C 2,[0.6,0.7]),(C 3,[0.6,0.6])}.B 1={(C 1,[0.3,0.5]),(C 2,[0.2,0.6]),(C 3,[0.2,0.7])},B 2={(C 1,[0.3,0.4]),(C 2,[0.2,0.6]),(C 3,[0.4,0.4])}.决策者要在两组目标集中分别选择一个目标同时满足条件C 1,C 2或者满足条件C 3,即决策者的要求为C 1and C 2o r C 3.决策目标A i (i =1,2,3,4,5)及B j (j =1,2)的评价函数值为:E (A 1)=[0.2,1],E (A 2)=[0.3,0.9],E (A 3)=[0.4,0.8],E (A 4)=[0.5,0.7],E (A 5)=[0.6,0.6],E (B 1)=[0.2,0.7],E (B 2)=[0.4,0.4]. 据Chen 和T an 的公式(1)得:S (E (A 1))=S (E (A 2))=S (E (A 3))=S (E (A 4))=S (E (A 5))=0.2,S (E (B 1))=-0.1,S (E (B 2))=-0.2. 上述结果表明,记分函数S 反映出目标A 1,A 2,A 3,A 4,A 5满足决策要求的程度相等,无法进行选择;而S (E (B 1))>S (E (B 2))表明目标B 1比B 2更满足决策要求,这与人们的直觉相悖.利用公式(4)得:501第5期多目标模糊决策的V ague 集方法L(E(A1))=0.2+0.2(1-0.2-0)=0.36,L(E(A2))=0.3+0.3(1-0.3-0.1)=0.48,L(E(A3))=0.4+0.4(1-0.4-0.2)=0.56,L(E(A4))=0.5+0.5(1-0.5-0.3)=0.6,L(E(A5))=0.6+0.6(1-0.6-0.4)=0.6+,L(E(B1))=0.2+0.2(1-0.2-0.3)=0.3,L(E(B2))=0.4+0.4(1-0.4-0.6)=0.4. 于是得出决策:目标A1,A2,A3,A4,A5中,A5是最佳选择;B1与B2中,B2是最佳选择.该例说明,记分函数L的选择能力要比S强,且选择过程不必分步,也不必追加其它选择手段.当然,对一些极端情形,也需采用一些特殊方案进行选择.比如,当t Ai =t Aj=0(i≠j)时,据公式(4)有L(E(A i))=L(E(A j))=0,此时,可通过比较f Ai 与f Aj给出决策.再如,对极端情形E(A1)=[0,1],E(A2)=[0.5,0.5],利用现有的记分函数均得不出合适的选择,应根据决策者的态度,恰当选择目标.正如Hong和Cho i[5]所述,保守者可能选择A2,冒险者可能选择A1.3.2 加权记分函数法本段讨论如何用加权方法解决3.1段中提出的多目标模糊决策问题.对约束条件C j,C k,…,C p按其重要性进行赋权,设权重分别为w j,w k,…,w p,其中w j,w k,…,w p∈[0,1]且w j+w k+…+w p=1.Chen和T an[4]给出如下加权记分函数W C(A i)=m ax(S([t ij,1-f ij])3w j+S([t ik,1-f ik])3w k+…+S([t ip,1-f ip])3w p,S([t is,1-f is]))(5)表示决策目标A i满足决策者要求的合适度,并指出W C(A i)(i=1,2,…,m)中取值最大者所对应的目标A i 便是最佳选择.现在公式(5)中,用本文给出的记分函数L取代S定义如下加权记分函数:W L(A i)=m ax(L([t ij,1-f ij])3w j+L([t ik,1-f ik])3w k+…+L([t ip,1-f ip])3w p,L([t is,1-f is]))(6)式中,W L(A i)取值越大,目标A i越满足决策者的要求.例3.2 设两组待选决策A1,A2和B1,B2.C1,C2,C3是三个约束条件,A1,A2,B1,B2的特征由如下V ague集描述:A1={(C1,[0.2,0.9]),(C2,[0.2,0.9]),(C3,[0.2,0.9])},A2={(C1,[0.5,0.6]),(C2,[0.5,0.6]),(C3,[0.5,0.6])},B1={(C1,[0.2,0.7]),(C2,[0.2,0.7]),(C3,[0.2,0.7])},B2={(C1,[0.4,0.4]),(C2,[0.4,0.4]),(C3,[0.4,0.4])}.假设决策者要求选择的目标满足约束条件C1,C2或者满足C3,即C1and C2o r C3.设约束条件C1,C2的权值分别为0.7和0.3,则由公式(5)W C(A1)=W C(A2)=0.1,W C(B1)=-0.1,W C(B2)=-0.2对第一组A1,A2,无法选择,对第二组B1,B2,由于W C(B1)>W C(B2),B1是最佳选择,这与人们的直觉相悖.由公式(6)得W L(A1)=0.34,W L(A2)=0.55,W L(B1)=0.3,W C(B2)=0.4于是,对第一组A1,A2,A2是最佳选择,对第二组B1,B2,B2是最佳选择.该例说明,加权函数W L的选择能力比W C强,且更合理.设目标A i的评价值为E(A i)=[t Ai ,1-f Ai],李凡等[6]给出如下一般形式的记分函数:S R(E(A i))=Κ1t Ai +Κ2f Ai+Κ3(1-t Ai-f Ai)(7)其中Κ1∈[0,1],Κ2∈[-1,0],Κ3∈[-1,1],且Κ1>Κ3>Κ2.理论上讲,公式(7)是一个比较好的结果,从形式上看,用投票模型可解释为:同时考虑到赞成、反对和弃权三个方面,但在实际决策中,合理选取Κ1,Κ2与Κ3是一个难点,同时也是关键的一点.利用函数S R,仿601系统工程理论与实践2004年5月公式(5)(6),可以定义加权函数:W R(A i)=m ax(S R([t ij,1-f ij])3w j+S R([t ik,1-f ik])3w k+…+S R([t ip,1-f ip])3w p,S R([t is,1-f is]))(8)以下讨论函数S R、W R与前面记分函数的关系.1)Κ1=1,Κ2=-1,Κ3=0]S R=S,W R=W C(Chen和T an的方法).2)Κ1=1,Κ2=1,Κ3=0]S R=H(Hong和Cho i的追加公式).3)Κ1=1,Κ2=0,Κ3=t A i]S R=L,W R=W L(本文的结果).4)a)Κ1=1,Κ2=-1,Κ3=-1 2]W R=R m in(Hong和Cho i的M ax2m in方法). b)Κ1=1,Κ2=-1,Κ3=0]W R=R center(Hong和Cho i的M ax2cen ter方法). c)Κ1=1,Κ2=-1,Κ3=1 2]W R=R m ax(Hong和Cho i的M ax2m ax方法).结论1)-3)是明显的,以下给出结论4)的推证.Hong和Cho i[5]对3.1段中的多目标模糊决策问题,给出如下选择方法.M ax-m i n方法 定义记分函数R m in(A i)=m ax W∩l=j,k,…,p C l (A i)-1-T∩l=j,k,…,p C l(A i)2,W Cs(A i)-1-T Cs(A i)2(9)R m in(A i)(i=1,2,…,m)中取值最大者对应的A i是最佳选择.M ax-max方法 定义记分函数R m ax(A i)=m ax W∩l=j,k,…,p C l (A i)+1-T∩l=j,k,…,p C l(A i)2,W Cs(A i)+1-T Cs(A i)2(10)R m ax(A i)(i=1,2,…,m)中取值最大者对应的A i是最佳选择.M ax-cen ter方法 定义记分函数R center(A i)=m ax(W∩l=j,k,…,p C l (A i),W Cs(A i))(11)R center(A i)(i=1,2,…,m)中取值最大者对应的A i是最佳选择.其中,W∩l=j,k,…,p C l(A i)=S([t ij,1-f ij])3w j+S([t ik,1-f ik])3w k+… +S([t ip,1-f ip])3w p,W Cs(A i)=S([t is,1-f is]),T∩l=j,k,…,p C l(A i)=H([t ij,1-f ij])3w j+H([t ik,1-f ik])3w k+… +H([t ip,1-f ip])3w p,T Cs(A i)=H([t is,1-f is]). a)当Κ1=1,Κ2=-1,Κ3=-1 2时,W R(A i)=m ax(S R([t ij,1-f ij])3w j+S R([t ik,1-f ik])3w k+… S R([t ip,1-f ip])3w p,S R([t is,1-f is]))=m ax(t ij-f ij-12(1-t ij-f ij)3w j+t ik-f ik-12(1-t ik-f ik)3w k +…+t ip-f ip-12(1-t ip-f ip)3w p,t is-f is-12(1-t is-f is)=m ax S([t ij,1-f ij])-1-H([t ij,1-f ij])23w j +S([t ik,1-f ik])-1-H([t ik,1-f ik])23w k+… +S([t ip,1-f ip])-1-H([t ip,1-f ip])23w p,701第5期多目标模糊决策的V ague集方法S ([t is ,1-fis])-1-H ([t is ,1-f is ]2=m ax W∩l =j ,k ,…,p C l(A i )-1-T ∩l =j ,k ,…,p C l (A i )2,WC s(A i )-1-T C s (A i )2=R m in (A i ). 类似可证b ),c ).3.3 距离法针对3.1段中提出的多目标模糊决策问题,从另一角度给出一种选择方法——距离法,其基本思想为:首先虚拟一个满足决策要求的理想目标,根据决策目标集中的目标与理想目标之间的距离给出决策.根据决策目标集A ={A 1,A 2,…,A m },构造满足约束条件C j ,C k ,…,C p 的理想目标:G 1={(C j ,∨mi =1[t ij ,1-fij]),(C k ,∨mi =1[t ik ,1-fik]),…,(C p ,∨mi =1[t ip ,1-fip])}={(C j ,[t g j ,1-f g j]),(C k ,[t gk ,1-fgk]),…,(C p ,[t gp ,1-f gp])}(12)满足约束条件C s 的理想目标:G 2={(C s ,∨mi =1[t is ,1-f is ])}={(C s ,[t gs ,1-fgs])}(13)其中,t g l =∨m i =1t il ,1-f g l =∨mi =1(1-f il ),l =j ,k ,…,p ,s .为便于讨论,以下记A i 1={(C j ,[t ij ,1-f ij ]),(C k ,[t ik ,1-f ik ]),…,(C p ,[t ip ,1-f ip])},A i 2={(C s ,[t is ,1-f is ]),i =1,2,…,m . 基于Sz m idt 和Kacp rzyk [8]给出的直觉模糊集之间的距离公式,以下定义V ague 集A i 1与G 1以及A i 2与G 2之间的距离分别为:d 1(A i 1,G 1)=p12N6l =j ,k ,…,pt il -t g l p + fil-f g l p + Πil -Πg l p(14)d 2(A i 2,G 2)=p12[ t is -t gs p+ fis-f gs p + Πis -Πgs p](15)其中1Φp <+∞,Πil =1-t il -f il ,Πg l =1-t g l -f g l ,l =j ,k ,…,p ,s ,N 为约束条件C j ,C k ,…,C p 的个数.以下定义决策目标A i 与理想目标之间的距离d g :d g (A i )=d 1(A i 1,G 1)∧d 2(A i 2,G 2)若存在i 0∈{1,2,…,m },使得d g (A i 0)=m in (d g (A 1),d g (A 2),…,d g (A m )),则目标A i 0是最佳选择.例3.3 设决策目标集A ={A 1,A 2,A 3,A 4,A 5},约束条件集C ={C 1,C 2,C 3},决策目标A i (i =1,2,3,4,5)在约束条件C 下的特征由以下V ague 集表示:A 1={(C 1,[0.2,0.8]),(C 2,[0.3,0.9]),(C 3,[0.2,1])},A 2={(C 1,[0.3,0.7]),(C 2,[0.2,0.8]),(C 3,[0.3,0.9])},A 3={(C 1,[0.4,0.6]),(C 2,[0.5,0.6]),(C 3,[0.3,0.8])},A 4={(C 1,[0.5,0.7]),(C 2,[0.4,0.6]),(C 3,[0.5,0.7])},A5={(C 1,[0.4,0.6]),(C 2,[0.6,0.7]),(C 3,[0.6,0.6])}. 决策者要在目标集中选择一个目标同时满足条件C 1,C 2或者满足条件C 3,即决策者的要求为C 1and C 2o r C 3.首先,利用公式(12)(13)构造满足条件C 1,C 2以及满足条件C 3的理想目标:G 1={(C 1,[0.5,0.8]),(C 2,[0.6,0.9])},G 2={(C 3,[0.6,1])}. 据公式(14)(15),取p =2得:801系统工程理论与实践2004年5月d 1(A 11,G 1)=0.3, d 1(A 21, G 1)=0.283, d 1(A 31,G 1)=0.224,d 1(A 41,G 1)=0.2, d 1(A 51,G 1)=0.187.d 2(A 12,G 2)=0.4, d 2(A 22,G 2)=0.265, d 2(A 32,G 2)=0.265,d 2(A42,G 2)=0.265, d 2(A 52,G 2)=0.4. 再由公式(16),得d g (A 1)=0.3,d g (A 2)=0.265,d g (A 3)=0.224,d g (A 4)=0.2,d g (A 5)=0.187 于是,目标A 5是最佳选择.这与例3.1得出的结论是一致的.4 结束语V ague 集概念本身的特殊性决定了元素对V ague 集的隶属情况应具三维表示,用投票模型解释为:赞成、反对和弃权三部分.本文利用投票结果细化“弃权”部分,对模糊条件下的多目标决策问题提出了一种新的记分函数法和加权记分函数法.并通过构造理想目标,借助距离给出了另一种新的目标选择方法——距离法.本文结果为解决多目标模糊决策问题提供了一系列有效的方法,同时为V ague 集理论渗透于其他应用领域开拓了一条新思路.参考文献[1] Gau W L ,Bueh rer D J .V ague sets [J ].IEEE T ran s Syst M an Cybern ,1993,23(2):610-614.[2] Zadeh L A .Fuzzy sets [J ].Info rm and Con tro l ,1965,8:338-356.[3] A tanassov K .In tu iti on istic fuzzy sets [J ].Fuzzy Sets and System s ,1986,20(1):87-96.[4] Chen S M ,T an J M .H andling m u lti 2criteria fuzzy decisi on 2m ak ing p rob lem s based on vague set theo ry [J ].FuzzySets and System s ,1994,67(2):163-172.[5] Hong D H ,Cho i C H .M u lti 2criteria fuzzy decisi on 2m ak ing p rob lem s based on vague set theo ry [J ].Fuzzy Sets andSystem s ,2000,114:103-113.[6] 李凡,卢安,蔡立晶.基于V ague 集的多目标模糊决策方法[J ].华中科技大学学报,2001,29(7):1-3.[7] 李凡,饶勇.基于V ague 集的加权多目标模糊决策方法[J ].计算机科学,2001,28(7):60-65.[8] Sz m idt E ,Kacp rzyk J .D istances betw een in tu iti on istic fuzzy sets [J ].Fuzzy Sets and System s ,2000,114:505-518.[9] Bu stince H ,Bu rillo P .V ague sets are in tu iti on istic fuzzy sets [J ].Fuzzy Sets and System s ,1996,79:403-405.(上接第96页)[5] L i w ei ,Cao J .H .Som e perfo rm ance m easu res of tran sferline con sisting of tw o un reliab le m ach ine w ith rep roces ru le[J ].J of System Science and System Engineering .1998,7(3):283-292.[6] 艾尼・吾甫尔,李学志.一个可靠机器,一个不可靠机器和一个缓冲库构成的系统分析[J ].系统工程理论与实践,2002,22(2):29-36.[7] Gen i Gupu r ,Xue 2zh iL i ,Guang 2tian Zhu .Functi onal A nalysisM ethod in Q ueueing T heo ry [M ].R esearch Info rm a 2ti on L td ,2001.[8] 曹晋华,程侃.可靠性数学引论[M ].北京:科学出版社,1986Λ[9] 张恭庆.泛函分析[M ].北京:北京大学出版社.[10] Yu L L yub ich ,Phong V Q .A sympo to tic stab ility of linear differen tial equati on in Banach space [J ].Studia M ath .1998,(88):34-37.[11] A .Pazy .Sem igroup s of L inear Operato rs and A pp licati on to Partial D ifferen tial Equati on s [M ].N ew Yo rk ,Sp ringer 2V erlag ,1983.901第5期多目标模糊决策的V ague 集方法。
模糊多目标多人决策法在登陆地域选择中的应用

K e y Wo r d s l a n d i n g o p e r a t i o n s ,l a n d i n g a r e a ,f u z z y mu l t i o b j e c t i v e ma n y - p e r s o n d e c i s i o n ma k i n g s
选择的五大主要 指标进行定性 、 定量分析 , 给出建模方法 , 并在此基础上举 例验证 。 关键词
中图 分 类 号
F u z z y Mu l t i o b j e c t i v e Ma n y - P e r s o n De c i s i o n Me t h o d
标: 1 )是 否 有 利 于 登 陆 部 队 的 突 击 上 路 ; 2 )登 陆地 域 内 是 否 有 可供 利用 的 机 场 、 港 口; 3 )是 否 有 利 于 海 军 和 空 军 的 活动 ; 4 )敌 防 御 是 否 有 薄 弱 部 位 ; 5 )是 否 有 利 于达 成 突 然
Ab s t r a c t P u t f o r wa r d t O s e t t l e a wa y b a s e d o n t h e F u z z y Mu l t i o b j e c t i v e Ma n y - P e r s o n De c i s i o n Me t h o d t o s o l v e t h e p r o b l e m o f t h e
个 方 案 的所 有 模 糊 目标 值 用 决 策 矩 阵F 表 示 :
作战 区域 , 包 括海 上 ( 含水下 ) 、 陆 上和空 中三部 分 区域 口 ] 。 选择登陆地域时 , 要求充分考虑登陆部 队和海 、 空军部 队的 联合作战要求[ 2 ] 。信息化 条件 下正确 选择登 陆地 域 , 依 然 是争取登陆作战主动 , 摆 脱被动 的关键 。未 来立 体登 陆作 战, 由于气垫艇、 直升机 等先进 登陆装 备大量 运用 , 将对 登 陆地域 的选择产生直接影响 , 除应考虑到 敌情 、 地情 等因素 外, 应着眼于登陆装备 的发展 , 选择有利于发挥现代 登陆装
带模糊时间窗的多目标越库选址路径优化问题
第 21 卷第 5 期 2019 年 10 月
• 管理科学与工程 •
电子科技大学学报(社科版) Journal of UESTC (Social Shu-yue (Fuzhou University Fuzhou 350100 China)
Abstract With the characteristics of high operational efficiency and low inventory level, cross-docking distribution network has higher demand for time. This paper studied the location-routing problem with time window constraints, and the fuzzy processing method was used to define the customer satisfaction function. Under the constraints of capacity and load, a multi-objective integration model was proposed for the location-routing problem. The model aimed to reduce costs, improve customer satisfaction and improve efficiency by selecting the cross-docking centers and arranging the routes reasonably. A multi-objective tabu search algorithm embedded grey relational analysis is designed to find a better Pareto frontier. Finally, the feasibility and effectiveness of the optimization model and the algorithm are verified by simulation.
基于模糊多属性的机群空面多目标任务分配
火 力 与 指 挥 控 制
F r o to & C mma dC n r l i C nrl e o n o to
Fe 2 1 b, 0 0
第 3 5卷 第 2期 21 0 0年 2月
文 章 编 号 : 0 20 4 ( 0 0 0 — 0 10 1 0 —6 0 2 1 )20 i g t h a g to h h e t o iia au n c n m i v l e Th n e r t d v l e s a l e c o d n o t e t r e f t e t r a ,p l c l l e a d e o o c a u . s t v ei tg a e au i r to e y f z y m u t a t i u e t e r n A . i e h o y s a i n d b u z li trb t h o y a d G. M l rt e r .An h n t e weg t fa t i u e r — l d t e h i h s o trb t s a e c lu a e y c mb n to e e mi i g we g t t e r . Th o e f mu t t r e s i n n o i g e ac ltd b o ia in d t r n n ih h o y e m d lo l — a g t a sg me t f r s n l i p a e s s a l h d Th me h d f u t- a g t p i ia i n s i n n i s a l h d o p a e l n i e t b i e . s e t o o m lit r e o t z t a s g me t s m o e t b i e f r l n s s
模糊模式识别在建设选址决策中的应用
1 建设选 址决 策 问题 的提 出
建设项 目选址是指提 出项 目后 , 在什么地方展开项 目或者是 启动项 目会达 到最优 的效果 的一个过 程 , 它是 项 目投资前期论 证 的重要 问题 。如果建设项 目选址失误 , 能会 造成 很多严重 的后 可 果。现在 由于错 误选址 而造成 的诸 如资金 损失 、 资源浪 费、 态 生 环境恶劣和投资效益低 下等 诸多方 面的后 果 已引起 了人们 的普
遍关 注。
…
型而绝对地 不属于其 他标 准类 型 , 也就是 说它对各种标 准类 型 的 隶 属度取值 范围不是 { ,} 而是[ , ] 01 , 0 1 。人们 处理这种性质 的问 题时, 常常是择其大而从之 , 即按最大隶属原则来识别 。 若被识别 的对象 “是论域 u上 的一个 明确元 素 , A1A2 而 , ,
则 判定元素 “ 在 u 上应识别 为A 。 0 0 类 如果还要进一步考虑 各种 因素在评价时所 占的比重不 同 , 这
于哪一个类 别的问题 。它是一种辨 识输入数据 的过 程 , 模糊 识别 时计算 综合隶属度可以加进权 重 , 把公式改为 : 系统 的目的是给每一输入 数据 ( 指标 、 因素或称特征 向量 ) 配一 分 个可能的模型类别 。可以推测 , 具有相似特征 的不 同输入值 可以 归入同一类 , 而不 同特征的输入则分 到不 同的类别 。
一
) 的过程 , 称作直 接模糊模 式识别方 法。
个确定元素 , 若对某个 i 有 :
Ai “ ) n ̄≤ ( 0 } o 0 =。 / “ ) 。 ( x A^ ≤
2 模糊 模式识 别
模式识别是属于计 算机应 用科学 的一 门新兴 科学 。模 式识 别 的问题就是已知事物的各种类别 , 然后来 判断给定 的对 象是属
基于模糊多准则决策方法的物流仓储节点的选址
基于模糊多准则决策方法的物流仓储节点的选址贾梦琪;程元栋【摘要】基于复杂网络理论和多属性决策方法,研究物流仓储节点的地址选择问题.首先,考虑到交通网的拓扑结构特征,选取了度中心性、介数中心性、接近性中心性和特征向量中心性四个评价指标.其次,利用层次分析法确定评价指标的权重,将模糊多准则决策(VIKOR)方法拓展应用于物流仓储节点的选址问题.最后,网络效率分析的仿真实验结果表明,与逼近理想解排序法方法和随机失效方法相比,VIKOR方法在选择物流仓储节点方面表现出更好的性能.本文的研究不仅拓展了VIKOR方法的应用领域,为复杂网络重要节点的识别提供了新的分析工具,也为物流管理决策提供了理论依据.【期刊名称】《湘南学院学报》【年(卷),期】2019(040)002【总页数】5页(P26-30)【关键词】物流;仓储节点;VIKOR方法;复杂网络【作者】贾梦琪;程元栋【作者单位】安徽理工大学经济与管理学院,安徽淮南 232001;安徽理工大学经济与管理学院,安徽淮南 232001【正文语种】中文【中图分类】F326.6在计算机科学、社会学、交通网络、经济管理等诸多领域,复杂网络已成为大量真实复杂系统的重要分析工具[1].大量研究表明,与网络中其他节点相比,复杂网络的重要节点对网络动态过程有较强的影响,如网络同步、疾病传播、交通导航等.因此,重要节点的识别不仅能够揭示网络结构、功能及其相互关系,同时也有助于解决实际问题[2].任晓龙等[3]系统地介绍了节点重要性排序方法,并对比了各方法的优缺点以及应用范围.仓储就是在特定的场所储存物品的行为.仓储节点的选址关系到整个物流链的流通效率.为确定复杂网络中的重要节点和线路,及资源分配机制提供有力的决策依据,在复杂网络重要节点的识别中,逼近理想解排序法(TOPSIS)作为一种同时考虑多方面因素的综合评价方法,得到了较为广泛的应用,如Liu等人[4]采用网络效率证明了TOPSIS方法可以更准确地识别山西大水网和北京地铁网的重要节点;Hu 等人[5]利用SIR模型模拟实验表明加权TOPSIS方法可以准确地对节点的重要性进行排序.然而,TOPSIS方法在评价节点重要性时具有一定的局限性,位于正理想方案和负理想方案的连线的垂直平分线上的点不能区分.模糊多准则决策方法(VIKOR)是Opricovic和Tzeng等人提出的一种折衷排序方法[6],已在多个领域中获得了成功应用[7].VIKOR方法的原理是定义各准则的正理想点和负理想点,计算各方案的群效用值和个体遗憾值,通过最大化群体效用值和最小化个体遗憾值来对方案集进行折衷排序,进而对方案进行综合评价.将VIKOR方法引入到物流仓储节点的选址问题,辅助做出更加合理的决策.1 理论基础在复杂网络研究领域,学者们提出了多种节点重要性评价指标,如度中心性、介数中心性、接近性中心性、特征向量中心性、离心中心性、Katz中心性、K核分解等[3]本文考虑到轨道交通网的特征及相关研究成果,从局部属性、传播属性、全局属性以及拓扑属性角度出发,选择了度中心性、介数中心性、接近性中心性和特征向量对物流仓储节点选址进行综合评价.相关指标的描述如下.定义1 局部属性——度中心性(Degree Centrality,简称DC)其中,N表示网络的总节点数,i表示目标节点,mij表示节点i和节点j连接关系,如果两个节点直接相连接,则mij=1;反之,mij=0.DC表示一个节点与其邻居节点的连通能力,数值越大,节点越重要.定义2 传播属性——介数中心性(Betweenness Centrality,简称BC)其中,pst表示从节点s到节点t的所有最短路径数量之和,pst(i)表示节点s到节点t的所有最短路径中经过目标节点i的最短路径数.节点的重要程度与节点的介数中心成正比.定义3 全局属性——接近性中心性(Closeness Centrality,简称CC)其中,表示目标节点i到节点j的所有最短距离之和.CC用于衡量目标节点对网络中其他节点的影响能力,数值越大,节点越重要.定义4.拓扑属性——特征向量中心性(Eigenvector Centrality,简称EC)其中,ρ是节点的邻接矩阵M的最大特征值,e=(e1,e2,…,en)T是网络的邻接矩阵M对应的最大特征值ρ的特征向量.节点的特征向量中心性数值越大,说明该节点越重要.2 基于VIKOR方法的节点重要性综合评价从整体角度出发,不考虑交通网的方向和站点之间的距离,运用复杂网络理论,将交通网中的站点视为复杂网络的节点,站点之间的连接抽象成复杂网络的边,提取上海轨道交通网的全局网络拓扑结构,将其转化成无向图 G= < V,E,M >,总共包括303 个节点,节点编号为1-303.其中 V={v1,v2,…,v303}是网络中节点的集合,E= { e1,e2,…,em}∈V×V是节点与节点之间边的集合,M=[mij]n×m是网络的邻接矩阵,如果节点i和节点j直接相连,则mij=1;否则,mij=0;另外mii=0.在复杂网络中,每个节点代表一个备选方案,节点的评价指标则是评估方案的多个标准,所以网络节点的选择可视为一个多属性决策问题.应用VIKOR方法,具体步骤如下:步骤1:确定决策矩阵.在上海轨道交通网中,节点集合 V= {v1,v2,…,v303} ,属性集合 F= { f 1,f2,f3,f4}={EC,DC,BC,CC},vi(fj) (i=1,2,…,303;j=1,2,3,4)表示节点i 在指标j下的重要性评估值,决策矩阵P可以表示为:步骤3:确定各个属性的权重值.EC、DC、BC、CC均为效益型指标,其值越大,表示节点的位置越重要.这四个指标的权重使用层次分析法(AHP)[8]计算得出,步骤如下:首先,利用(0,1,2)三标度法对四个指标进行相互比较,然后构建一个比较矩阵CV.与其他指标相比,DC简单直观且计算复杂度低,直接描述了节点的影响力,因此DC被认为是最重要的指标.BC、CC描述了节点的传播属性和全局性属性,时间复杂度较高,所以重要性低于DC.EC是根据邻居节点的信息评价该节点的重要性,传播的信息较少,因此EC是最不重要的.比较结果如表1所示.表1 三标度法构建重要性指标的比较值Table 1 The comparison of the importance indicator of the three scales methodCV EC DC BC CC bi EC 1 00 0 1 DC 2 1 1 2 6 BC 2 1 1 0 4 CC 2 0 2 1 5在表1中,然后,按照极差法把比较矩阵CV构造成判断矩阵[8].最后,经一致性检验,得到各指标的权重分别为wEC=0.0727,wDC=0.4218,wBC=0.2088,wcc=0.2967.步骤4:计算各个节点的最大化群效用值Si、最小化个体遗憾值Ri和Qi的值.其中,S+=miniSi,S-=maxiSi,R+=miniRi,R-=maxiRi,v表示决策机制系数,v∈[0,1].如果 v>0.5,则表示决策依据最大化群效用的决策机制进行;v<0.5,则表示决策依据最小化个体遗憾的决策机制进行;v=0.5,则表示根据决策者的协商进行决策.步骤5:由Si、Ri和Qi三个排序列表对节点进行排序,数值越小表示方案越优.3 网络效率分析为验证VIKOR方法在物流仓储节点选址中的性能,本文利用网络效率进行分析,将VIKOR方法与TOPSIS方法[4]和随机失效方法[9]进行比较.网络效率[10]表示网络的连通性能,其值越大,代表网络的连通能力越强.网络效率由公式(12)[11]给出:其中,Γij表示节点i到节点j的最短路径长度,ε的取值范围为[0,1],ε=1表示网络的连通性最好,ε=0表示网络的连通性最差.本文通过删除部分节点对网络遭受蓄意攻击和随机攻击进行仿真实验,网络效率的下降速度可以刻画方法的有效性.网络效率下降速度越快,证明该方法识别重要节点的效果越好.网络效率的相对值fk由公式(13)[4]给出:其中,初始网络效率ε0=0.0996,εk( k =1,2,3)表示以VIKOR方法、TOPSIS方法、随机失效方法排名发生节点失效时的网络效率.复杂网络中使用不同的评价方法,删除同样数量的节点后网络效率的值会不尽相同.为更直观地比较VIKOR方法和其他两种方法的性能,我们引入网络效率偏差值,其可由公式(14)[4]给出:当△fk10时,表示VIKOR方法的性能优于TOPSIS方法和随机失效方法;反之,TOPSIS方法和随机失效方法优于VIKOR方法.以上海为例,分别采用三种方法依次攻击排名前45的节点,结果如图1和图2所示.图1给出了不同方法攻击下的上海轨道交通网网络效率相对值变化情况,可以看出采用VIKOR方法攻击前28节点时,网络效率的下降速度最快.例如,当前10个节点失效后,由VIKOR方法、TOPSIS方法、随机失效方法得到的网络效率降至0.59,0.64和0.94,这说明了VIKOR方法在识别网络中重要节点上的是很有效的.攻击该网络排名前28-45的节点时,VIKOR方法逐渐与TOPSIS 方法重合,但仍优于随机失效方法.图2给出了TOPSIS方法、随机失效方法与VIKOR方法相比网络效率偏差值的变化情况,根据曲线的走势可以看出VIKOR方法优于TOPSIS方法、随机失效方法.当攻击排名28-45的节点时,TOPSIS方法接近于VIKOR方法表现出较好的性能.综上所述,VIKOR方法总体上比TOPSIS方法、随机失效方法更能准确地识别上海重要的物流仓储节点,由此证明了本文所提方法的合理性.图1 不同方法攻击下的物流仓储节点网络效率相对值变化Fig.1 The relative efficiency changes of logistics warehouse node network under different attack methods图2 VIKOR方法与TOPSIS、随机失效方法的网络效率偏差值变化Fig.2 The variation of network efficiency deviation between VIKOR method and TOPSIS and random failure method4 结论本文基于复杂网络理论和多属性决策方法,考虑轨道交通网的拓扑结构特征,结合相关研究成果,将VIKOR方法引入到物流仓储节点的选址,从局部属性、传播属性、全局属性和拓扑属性四个方面综合描述网络节点的重要性,排序结果符合实际情况.此外,采用网络效率分析,将VIKOR方法与TOPSIS方法和随机失效方法进行了比较,仿真实验结果表明VIKOR方法具有更好的准确性和应用性.将VIKOR方法应用于物流仓储节点的选址,不仅拓展了该方法的应用领域,也为选择仓储节点的地址提供了新的分析工具.对于VIKOR方法的进一步优化,并在不同类型的复杂网络中应用,值得进一步探索.参考文献:【相关文献】[1]CHEN G R,WANG X F,LI X.Introduction to complex networks:models,structures and dynamics[M].Beijing:Higher Education Press,2012.[2]NEWMAN M E J.The structure and function of complex networks[J].SIAM Review,2003,45(2):167-256.[3]任晓龙,吕琳媛.网络重要节点排序方法综述[J].科学通报,2014,59(13):1175-1197.[4]LIU Z H,CHENG J,WANG J Y,et al.The node importance in actual complex networks based on a multi-attribute ranking method[J].Knowledge-Based Systems,2015,84(8):56-66.[5]HU J T,DU Y X,MO H M.A modified weighted TOPSIS to identify influential nodes in complex networks[J].Physica A Statistical Mechanics & Its Applications,2016,444(2):73-85.[6]OPRICOVIC S,TZENG G H.Compromise solution by MCDM methods:a comparative analysis of VIKOR and TOPSIS[J].European Journal of Operational Research,2004,156(2):445-455.[7]MARDANI A,ZAVADSKAS E K,GOVINDAN K,et al.VIKOR Technique:A systematic review of the state of the art literature on methodologies and applications [J].Sustainability,2016,8(1):37.[8]朱茵,孟志勇,阚叔愚.用层次分析法计算权重[J].北方交通大学学报,1999,23(5):119-122.[9]谢丰,程苏琦,陈冬青,等.基于级联失效的复杂网络抗毁性[J].清华大学学报(自然科学版),2011,51(10):1252-125.[10]LATORA V,MARCHIORI M.Efficient behavior of small-world networks [J].Physical Review Letters,2001,87(19):198701[11]冯慧芳,李彩虹,王瑞.河谷型城市公交网络脆弱性研究——以兰州市为例[J].交通运输系统工程与信息,2016,16(1):217-222.。
多目标C-A指派问题的模糊差值法求解
多目标C-A指派问题的模糊差值法求解李敏【摘要】A multi-objective C-A assignment problem is proposed and discussed in this paper. Firstly, its multi-objective integer linear programming model is presented. Then, it is converted to a fuzzy C-A assignment problem by applying the fuzzy relationship synthetic matrix, and its optimal solution can be found through difference value method. Finally, a practical example is given to illustrate the method.%提出一类多目标的C-A指派问题,给出了它的多目标整数线性规划数学模型,运用模糊关系合成矩阵将其转化为模糊C-A指派问题,采用差值法求解。
最后给出一个应用实例。
【期刊名称】《湖北文理学院学报》【年(卷),期】2016(037)011【总页数】3页(P10-12)【关键词】多目标;C-A指派问题;模糊隶属度;差值法【作者】李敏【作者单位】湖北文理学院数学与计算机科学学院,湖北襄阳 441053【正文语种】中文【中图分类】O221.6标准指派问题的一般提法为:有n项工作要安排n个人去做,每个人只能安排一项工作,每一项工作只需要安排一个人.若已知第i个人做第j项工作的效率为cij(i,j=1,2,…,n),求使总效率最优的指派方案.解决这一问题的著名方法是匈牙利法[1].该问题是个单目标的决策问题,但在实际生活及各类管理决策过程中,决策者需要考虑的因素往往很多,如时间、效益、安全等等,因此面对的多是各类非标准形式[2]的或多目标[3-4]的指派问题.基于此,本文讨论了一类多目标的C-A指派问题,给出了它的多目标整数线性规划数学模型,运用模糊关系合成矩阵将其转化为模糊意义下的C-A指派问题[5],并采用差值法求解,为决策者提供了可靠的科学依据.多目标C-A指派问题:从m个人中选择k(0<k<min{m,n})个人去做n项工作中的k项工作,要求一人只能做一件事且一件事只需要一个人完成.在选择中有l个需要考虑的目标,若在第t个目标下,记第i人做第j项工作的相应目标属性值为ctij(i=1,2,…,m;j=1,2,…,n;t=1,2,…,l),试确定使各目标均最优的指派方案.它的数学模型为:其中对值越大越优的目标而言,max′表示取最大值 (max);对值越小越优的目标而言,max′表示取最小值(min).2.1 多目标模糊关系合成矩阵由于在第t个目标下第i人做第j项工作的目标属性值为,因此可得相应于目标t的属性值矩阵,再由矩阵Ct计算出目标t下的各属性值对“优”的模糊相对隶属度,对目标值越小越优的用公式(1)计算,对目标值越大越优的用公式(2)计算[6].其中分别是矩阵中元素的最大和最小值.记(t=1,2,…,l)为属性值矩阵Ct在目标t下的关于“优”的模糊关系矩阵,再根据层次分析法或德尔斐法(Delphi)等方法来规定各目标的权向量w= (ω1,ω2,…,ωt).记bij为综合l个目标后的各属性值对“优”的合成相对隶属度,计算公式如下:则以bij为元素的m×n矩阵B称为多目标模糊关系合成矩阵.2.2 多目标C-A指派问题的模糊差值法在多目标模糊关系合成矩阵中B=(bij)m×n,若把bij看作是第i人做第j项工作的模糊综合效益,其值越大越优,可把B看作是多目标C-A指派问题的模糊效益矩阵,则原多目标C-A指派问题已被转化成一个模糊意义下目标函数求最大的C-A 指派问题,当然可用匈牙利法求解,但将其转换成标准指派问题后,其规模会变得很大,大大增加了计算难度.对此,由文献[3]可知,用差值法求解目标函数最小化的C-A指派问题非常方便,故先将多目标C-A指派问题转化为模糊意义下目标函数求最小的C-A指派问题,再用差值法求解.若记转化后的模糊效益矩阵为,其中为所有bij(i=1,2,…,m;j=1,2,…,n)中的最大值,其数学模型为:例已知某单位现要从5个人中选择3个人去完成4项工作中的某3项工作,已知每个人做不同工作的效益矩阵、时间矩阵、安全性矩阵分别为C1,C2,C3,请确定使得三个目标都最优的指派方案.解由于效益目标值和安全性目标值属于越大越优型,故它们的模糊相对隶属度选用公式 (2)计算,而时间目标值属于越小越优型,故它的模糊相对隶属度选用公式(1)计算,则得到三个目标下关于“优”的模糊关系矩阵,再取三个目标的权向量为,根据(3)式给出bij(i=1,2,…, m;j=1,2,…,n),则可得模糊关系合成矩阵为:由于以矩阵B为模糊效益矩阵的指派问题是最大化问题,因此必须将B转化为B′,再按差值法求解,得解矩阵X=(xij)5×4.从求解矩阵可以看出,选择后3个人去做后3项工作,虽然不是使得3个目标各自单独考虑时都达到最优的指派方案,但从C1,C2,C3数据来看,要同时平衡这3个目标,该指派方案是完全合理的.本文根据管理决策的实际需要,提出了一类多目标C-A指派问题,运用模糊关系合成矩阵将其转化成模糊C-A指派问题,并用差值法来求解.算例表明该转化及求解方法巧妙、简便有效,能够为决策者提供可靠的决策依据.【相关文献】[1]李敏.运筹学基础及应用[M].武汉:武汉大学出版社,2014.[2]张劲松,李红.求解非标准形式指派问题的行调整法[J].统计与决策,2008(14):155-156.[3]郭倩倩,吴开信,郝光.一类模糊多目标指派问题的解法及应用[J].西华大学学报:自然科学版,2006,25(2):70-71,87.[4]李仁传,张合勇.变权多目标指派问题及其求解[J].军事运筹与系统工程,2012,26(4):58-61.[5]李敏.求解C-A指派问题的差值法[J].襄樊学院学报,2011,32(8):21-24.[6]宋昭峰,刘付显.基于模糊指派的阵地选址决策[J].火力与指挥控制,2006,31(7):34-36.。
多分辨率多目标物流配送中心选址模型研究
Study on Multi-resolution and Multi-objective Site Selection Model for Logistics Distribution Centre 作者: 崔永杰
作者机构: 深圳大学土木工程学院,广东深圳518060
出版物刊名: 物流科技
页码: 118-121页
年卷期: 2013年 第1期
主题词: 关键词 多分辨率建模 物流配送中心选址 层次分析 法 混合整数规划法 遗传算法
摘要:依据多分辨率建模的基本理念,通过定性与定量选址相结合的方式,从不同维度对备选配送中心进行筛选,确定最佳选址方案.以寻求对现有配送中心选址模型的改进。
多分辨率配送中心选址模型首先应用层次分析法从宏观角度对备选配送中心进行指标考量.确定初始选址方案。
然后综合考虑选址成本、环境保护和客户满意度等选址影响因素,利用混合整数规划法建立选址模型,通过遗传算法求解模型.确定配送中心最佳选址方案。
最后通过算例分析证明了模型可行性.说明多分辨率多目标配送中心选址模型可以兼顾选址的全面性和准确性,并提供综合可靠的配送中心选址方案。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
!""!年#月系统工程理论与实践第#期文章编号$#"""%&’(()!""!*"#%"#"(%"+基于模糊指派的多目标多工程选址决策宋业新#,!,陈绵云#,张曙红#)#-华中科技大学控制科学与工程系,湖北武汉+.""’+/!-海军工程大学基础部,湖北武汉+.""..*摘要$提出了一种新的多个工程选址的多目标决策方法0运用模糊关系合成矩阵将各种情况下的多目标工程选址问题转化为模糊指派或模糊广义指派问题,并用传统的匈牙利算法来求解0最后给出一个应用实例0关键词$多目标决策/模糊指派/匈牙利算法中图分类号$12#.文献标识码$3456789%:;<=>89?=@=>9A 9:B %C D E 9B F5=8G :HI :J K 98=K =7=>89B F:I 2J :<=>8A L D A =H:BM 6N N O3A A 9F B C =B 8K P Q R S =%T 9B #,!,U V W Q 59D B %O 6B #,X V 3Q R K G 6%G :B F#)#-@=Y D J 8C =B 8:I U :B 8J :7K >9=B >=D B HW B F 9B ==J 9B F ,V 6D N G :B FZ B 9?=J A 98O:I K >9=B >=D B H1=>G B :7:F O,[6G D B +.""’+,U G 9B D /!-@=Y D J 8=C B 8:IL D A 9>U :6J A =A ,Q D ?D 7Z B 9?=J A 98O :IW B F 9B ==J 9B F ,[6G D B+.""..,U G 9B D*\]^_‘a b _$3B =c C 6789%:;<=>89?=H =>9A 9:BC D E 9B FC =8G :HI :J A 98=A =7=>89B F:I Y J :<=>8A9AY J :Y :A =H -M 9J A 87O ,8G =I 6N N OJ =7D 89:B A G 9YA O B 8G =89>C D 8J 9T9A>D 7>67D 8=H -1G =B8G =Y J :;7=C :IA 98=A =7=>89:B :IY J :<=>8A6B H =J=?=J O A 986D 89:B 9A>:B ?=J 8=H 8:DI 6N N O D A A 9F B C =B 8Y J :;7=C :J D I 6N N O F =B =J D 79N =H D A A 9F B C =B 8Y J :;7=C ,D B H 98A :Y 89C D 7A :7689:B>D B;==D A 97O:;8D 9B =H;O8G =I D C :6A V 6B F D J OD 7F :J 98G C -M 9B D 77O ,8G =Y J :Y :A =HC =8G :H9A 9776A 8J D 8=H;OD Y J D >89>D 7=T D C Y 7=-d e f g h ‘i ^$C 6789%:;<=>89?=H =>9A 9:B C D E 9B F /I 6N N O D A A 9F B C =B 8Y J :;7=C /V 6B F D J OD 7F :J 98G Cj 引言在工程设计中,经常会遇到多工程选址的多目标决策问题,这类问题主要是要求确定几个工程的位置使整个系统的经济k社会效益最大,而环境污染最轻0为了避免工程的重复建设,一般要求在这个系统内一个工程只能建在一个位置,而对于要求一个位置最多只能建一个工程的有约束关系的多目标决策问题,文献l #,!m 分别给出了多目标模糊动态规划和基于网络最大流寻优的模糊网络图决策方法/文献l .m 给出了一种更为简洁的模糊匈牙利决策方法0显然,这种约束关系在工程数少于或等于位置数时是比较合理的,但是,实际问题中经常也会出现工程数多于位置数的情况,此时上述方法便不再适用,因为这时必然会有一些位置要建多个工程0基于此,本文在文献l .m的基础上,提出了一种新的k 适用范围更广的决策方法,将各种情况下的多目标工程选址问题都转化为模糊指派或模糊广义指派问题,并用传统的匈牙利算法l +m来求解,方法简便k 实用nn n n n n n n n n n n n n n n n n n n n n n n n n n n n n n n n n n n n n n n n n n n n n n n n n n n n n n n n 04收稿日期$!"""%"+%!(资助项目$国家自然科学基金)&o (’+"#(*/国防科技预研基金)o (p &-.-+,p ["q "’*!多目标模糊关系合成矩阵设"#$是工程设计系统中的两个有限论域#"是设计工程的论域#记为"%&工程’#工程(#)#工程*+%&,’#,(#)#,*+-$是设计位置的论域#记为$%&位置’#位置(#)#位置.+%&/’#/(#)#/.+0同时假设工程在选址时要考虑1个目标#对于目标232%’#(#)#14#工程,5建在位置/6时的指标值3或称效益值4记为7256#则得到在目标2条件下的指标值矩阵82%372564*9.0根据矩阵82求出在目标2条件下的各指标值对优的相对隶属度:256#对值越大越优目标和值越小越优目标分别用以下公式3’4;3(4计算<=>:256%7256?72@A B 72@C D ?72@A B 3’4:256%72@C D ?725672@C D ?72@A B3(4上述公式中#5%’#(#)#*-6%’#(#)#.-2%’#(#)#1E 72@C D #72@A B 分别表示矩阵82中元素的最大值和最小值0根据以上公式将指标值矩阵82变为在目标2条件下关于优的模糊关系矩阵F G2%3:2564*9.E 由德尔斐法3H I J K L A 4或层次分析法3M N O4等确定目标权向量P %3Q ’#Q (#)#Q 14#令:56%R 12%’Q 2:2563S 4式中5%’#(#)#*-6%’#(#)#.-2%’#(#)#1E 称:56为综合考虑1个目标后各指标值对优的合成相对隶属度0这样*9.个:56组合成多目标模糊关系合成矩阵TF%:’’:’():’.:(’:(():(.U:*’:*():V W X Y *.%3:564*9.3=4Z 工程选址的模糊指派法如果将位置看成是传统指派问题中的任务#而把工程看成是指派问题中完成任务的人#则可把工程选址决策问题转化为指派问题求解0当然#在这里#我们还是规定#在工程数少于或等于位置数时#每个位置最多只能建一个工程-而在工程数多于位置数时#每个位置可能建多个工程#这是比较符合实际的0Z E [指派问题中效益矩阵\的求法下面分三种情况来讨论效益矩阵]的求法0情况一工程数*等于位置数.3*%.4此时一个位置正好可建一个工程#满足传统指派问题的条件0而矩阵3=4为一方阵#它的每一个元素:56是综合考虑1个目标后各指标值对优的合成相对隶属度#可将其理解为把第5个工程建在第6个位置时的综合效益0因此可将矩阵3=4直接作为传统指派问题中的效益矩阵#即]%3^564.9.%TF 0情况二工程数*小于位置数.3*_.4显然这时必有.?*个位置不能建任何工程#它转化为指派问题是一个广义非平衡的指派问题0在这种情况下#我们引进.?*个‘虚设工程a #使位置数与工程数相等#然后将矩阵3=4增加.?*行#其元素值均取b #即认为这些工程建在任何位置的综合效益为b #其他行元素值不变#从而得到一个新的方阵#再将此方阵作为效益矩阵]#即]%3^564.9.%T F <>b0其中b 表示3.?*49.零矩阵0情况三工程数*大于位置数.3*c .4在这种情况下#每个位置都可能建多个工程#转化为指派问题又属于另一类广义指派问题<d >0先假定每个位置建一个工程#剩下的*?.个工程则可能建在任何一个或一些位置中#因此我们假设每个位置都存在另外*?.个与之完全‘等价a 的‘虚拟位置a #而每个工程建在这些‘等价a 位置时的综合效益值完全一eb ’第’期基于模糊指派的多目标多工程选址决策致!这样!整个系统中就可认为有"#$%"&’(个位置了!位置数又多于工程数!然后再增加"#$%"&’(%$)#$%"(#"%’(个*虚设工程+!令它们建在任何位置时的综合效益为,-这样!位置数便等于工程数!能满足一个位置只建一个工程的要求!于是可令这种情况下的效益矩阵为.)#/01("#$%"&’(2"#$%"&’()343453467,,5,其中第一行有#$%"&’(个348第二行中的,表示#$%"(#"%’("零矩阵-9:;模糊指派模型及匈牙利算法求解上面求出的效益矩阵.中的元素值均表示各工程建在某个位置时的综合效益!其值越大越好!因此该指派问题是最大化问题!而匈牙利法仅限于最小化的指派问题!故必须进行转化!建立如下的整数线性规划模型-<=>?)@A0)’@A1)’#/$/B%/01(B 01C :D :@A0)’B 01)’!1)’!E !5!A @A1)’B 01)’!0)’!E !5!AB 01FG H ),!’!0!1)’!E !5!A 其中A)"!当$I"时"#$%"&’(!当$J"K时/<L M )<L M K /01N 0!1)’!E !5!A O 8B01)’表示第0个工程建在第1个位置!否则B 01),-用匈牙利算法求解上述模型!得模型最优解P )#B 01(A 2A -’(当$)"时!可直接根据解#B01(A 2A 中等于’的元素来决定各工程的设计位置-E (当$Q "时!可根据解#B01(A 2A 中前$行等于’的元素来决定各工程的设计位置-如B 01)’!若0I $!则将第0个工程建在第1个位置8若0J $!则表示第1个位置应建一个*虚设工程+!即不建任何工程-R (当$J "时!同样只考虑解#B 01(A 2A 中前$行等于’的元素!如果B 01)’!且0I $!注意此时’I 1I A !将它表示为1)S "&T #,I S I $%"!’I T I "(!则表示第0个工程应建在第T 个位置!因为第1个位置要么是位置T !要么是位置T 的一个等价*虚拟位置+-U 应用实例下面仅就工程数多于位置数的情形来说明上述方法的应用-设某市政府要在其所辖的三个地区#记为V )K W ’!W E !W R O (修建四项大的工程#记为X )K Y ’!Y E !YR !YZ O (!选址决策所要考虑的目标因素有三N ’(经济效益最大8E (环境污染最小8R (社会效益最大-三个目标的指标值数据列于表’%R #将文献6’7中案例去掉一个位置后所得(:表’经济效益#[(\’01W ’W E W R Y ’’,:Z ,’’:,’’E :]Z Y E ^:^Z _:R R ‘:R a Y R ]:^]^:a a ^:_‘Y Z’,:’,’^:Z Z’’:‘‘表E 环境质量综合指数\E01W ’W E W R Y ’E :’E :^’:’Y E ’:^E :a ’:a Y R ’:]E :R ,:_Y Z,:^,:‘,:_表R 社会效益\R01W ’W E W R Y ’]E ‘Y E ^’_Y R ^Z _Y Z^‘a将三个表中的数据分别作为在三个目标条件下的指标值矩阵b ’!b E !b R:由于目标’和R 属值越大越优型!相对隶属度应选用公式#’(!目标E 属值越小越优型!故相对隶属度选用公式#E (!分别求出它们在,’’系统工程理论与实践E ,,E 年’月各目标条件下关于优的模糊关系矩阵!再假设目标权向量取为等权重"#$%&’!%&’!%&’(!最后由公式)’*得出该系统对于优的模糊关系合成矩阵为+,#-./0-.%1-.12-./3-.-2-.31-./’-.00-.435678-.49-.91-.43由于此时:#/!;#’!:<;!按’.%节情况三的方法!引进一组等价的=虚拟位置>和两个=虚设工程>!得指派问题的效益矩阵?#-./0-.%1-.12-./0-.%1-.12-./3-.-2-.31-./3-.-2-.31-./’-.00-.43-./’-.00-.43-.49-.91-.43-.49-.91-.43------5678------将问题转化为最小化问题!用匈牙利算法求出最优解@#)A B C *4D 4#--%---%----------%-%-------%--5678----%-考虑@中前四行等于%的元素!有A %’#%!A 0%#%!A ’4#%!A/0#%E 由于4#%D’F’!所以位置4是位置G’的等价=虚拟位置>!由此得到工程选址的最优决策为H 工程I 0建在位置G %J 工程I /建在位置G 0J 工程I %和I ’建在位置G ’E 工程I 0和I /的选址与文献K%L )位置数等于工程数*中的结论一致!再从实例事先给定的各目标指标值分析!位置G ’的各项条件)除对于工程I /外*均要比其它两个位置优!因此!在位置G ’建两个工程)不包括I /*!结果是完全合理的E M 结论基于模糊指派的多目标多工程选址决策方法!将各种情况下的多目标工程选址问题都转化为模糊指派或模糊广义指派问题!并用传统的匈牙利算法来求解E 它不仅比原有方法更为简便!而且比原有方法具有更广的适用范围!具有较高的推广应用价值E 参考文献HK %L 陈守煜.多目标有约束模糊关系优选决策理论及其在港口工程选址中的应用K NL .系统工程理论与实践!%993!%3)0*H /%O/2.K 0L 周前祥!张达贤.多目标有约束关系模糊网络图决策模型及其应用K N L .系统工程与电子技术!%991!%9)%%*H /O2.K ’L 宋业新!陈绵云!张曙红!等.有约束多目标系统的模糊匈牙利决策及其应用K NL .系统工程与电子技术!0--%!0’)0*H 12O2%.K /L 钱颂迪.运筹学K P L.北京H 清华大学出版社!%99-.K 3L 陈守煜.系统模糊决策理论与应用K P L.大连H 大连理工大学出版社!%99/.K 4L 黄德才.求广义指派决策问题最优解的有效算法K NL .控制与决策!%999!%/)’*H 010O013.%%%第%期基于模糊指派的多目标多工程选址决策。