视觉定位软件VisionKit软件说明书完整版
(完整word版)VISION中文的使用说明
NI Vision 控件模板Vision控件模板位于LabVIEW控件模板的最顶层,由一下元素组成:IMAQ Image.ctl—该控件是一个类型定义,用于声明图象类型的数据。
在V I的前面板中使用该控件代表图象类型数据。
例如,使用该控件作为一个子程序的输入或输出,使调用成成可以将一幅图像传送给子程序。
图像显示(Image Display)—该控件用于在LabVIEW 中直接显示图像。
也可以利用该控件创建关注区域 (ROIs)。
图像显示控件提供标准和3D版两种外观。
IMAQ 视觉控件(IMAQ Vision controls)—这里的控件用于将NI Vision的程序控件直接加入入用户自己的程序中获得相应的功能。
机器视觉控件(Machine Vision controls)—这里的控件用于将NI Vision 的机器视觉控件直接加入到用户自己的程序中以获得相应的功能。
NI Vision 函数模板NI Vision for LabVIEW 由三个主要的函数模板组成:常用视觉程序(Vision Utilities), 图像处理(Image Processing), 和机器视觉(Machine Vision)。
本节介绍这些模板以及它们的子模板。
常用视觉程序(Vision Utilities)常用视觉函数用于在NI Vision中处理和显示图像。
Image Management—管理图像程序组。
利用这些程序可以建立和释放图像,设置和读取图像的属性例如尺寸和偏移量,复制图象。
也可以使用一些高级的V is来定义图像的边框区域以及访问图像数据的指针。
Files—一组使用不同格式读、写图像文件,并从文件中获得所包含的图像的信息的程序模块。
External Display—用于在外部窗口显示图像的程序模块组。
使用这些程序模块可以完成以下任务:读取和设置窗口属性,如尺寸、位置、缩放系数为图像窗口设置调色板建立及使用图像浏览器在图像窗口上为选中的关注区域建立和使用不同的交互式绘图工具。
视觉软件说明文档
视觉软件说明文档(标定及定位)视觉软件界面简介主界面界面功能模块介绍1.可视窗口:实时视频的显示,物体识别显示,如下图所示:2.当前任务状态:当“鼠标”移动到该位置会弹出浮动提示,将显示当前相机参数,任务数量,模板参数等信息,如下图所示:3.相机配置:暂时只支持映镁精的相机,参数配置如下图所示:4.创建模板:点击按钮后,会自动截取一张完整的相应分辨率大小的图片,然后选取想要的区域,进行保存。
5.创建任务:点击后,会弹出如下窗口:1)选择相应的模板打开模板图片后,选择一个抓取点(这将是匹配参数的一部分) 2)选择算法后会弹出窗口进行参数的调节,如下图所示:注意事项:1.抓取点:不用自己输入(之前打开模板图片选择的抓取点就是改抓取点)2.金字塔层数越高,识别越快(相反的,识别度就会下降,建议选择4)3.边缘阈值下限/上限:上限值始终要保持大于下限值实时调整这项值,窗体下面会进行实时预览显示。
对照下面的判别方式,将值调整到合适为止好坏的判别方式:效果好:如下图效果差:如下图4.角度范围下限/上限:上限值始终要保持大于下限值如果是有角度:比如矩形等:范围一般设置为:0-360如果是没有角度的(或是细微的):比如圆形之类的,范围一般设置为:0-0.1 (上限值绝对不能设置为0)4.匹配阈值:范围是0-1:值越低:匹配度越低(拿类似边缘的也有可能识别到,对环境要求较低)值越高:匹配度越高(比如设置为1,那么将匹配一模一样的才行,对环境较高)推荐设置:光源做好后,匹配度一般设置为0.7-0.9之间6.保存好模板参数,保存任务名(请保存到当前视觉软件TaskTemplate目录下,格式为.ini)7.选择任务:任务支持单选,多选,追加8.启动标定:将相机固定好,并调整好位置,光源做好;选择好模板任务后,机器人软件:标定程序配置完毕后,点击按钮就能进行对机器人的标定。
标定时间需要15分钟左右!标定之前,请先启动机器人软件,标定模式为:固定模式(全局模式)9.标定结果:待标定完成后,点击此按钮,将会把标定文件保存到当前视觉软件CalibData目录下文件名为:calibration001.yml10.测试标定:测试标定文件是否正确,精度知否达标,视觉软件识别到物体后,机器人能否正确的抓取到识别物!操作简介:1:机器人操作软件,利用视觉模块编辑一段视觉相关的程序(具体参考机器人软件操作说明书)2:视觉定位软件,选择好手眼标定文件:点击“固定模式”复选框,选择calibration001.yml标定文件3:点击“测试标定”按钮即可观察11.手眼标定类型的选择暂时只支持固定模式,点击“固定模式”复选框,选择calibration001.yml标定文件12.开启定位选择好任务,手眼标定文件,点击此按钮就能和机器人软件配合做定位识别了13.关闭定位将停止定位识别14.识别速度调整在实际应用中,机器人软件编好程序后,里面将会用来延时等相关操作控制视觉定位,这个选项能配合机器人软件,通过调整参数值,达到想要的识别速度视觉标定操作(机器人部分)一,概述视觉标定的思路为:使用多个特征点分别在图像坐标系的像素坐标和机器人的空间坐标,来求得两个坐标系之间的影射关系。
康耐视视觉软件说明书

Now you can get the world’s top vision software—no matter which camera, frame grabber, or direct-connect digital standard you use.Support for all image capture needsBroad Camera SupportVisionPro captures images from hundreds of industrial cameras, covering the complete range of video formats and acquisition requirements. Strategic Cognex relationships with major camera suppliers enable early support of new cameras and technology. VisionPro provides open camera support, as well as configuration and diagnostic tools. This enables customers to configure, analyze, and modify cameras for numerous acquisition platforms.Acquisition IndependenceVisionPro software provides pre-configured, tightly integrated acquisition from both Cognex hardware and direct-connect digital cameras. For images from any other source, such as microscopes or 3rd-party frame grabbers, VisionPro provides a flexible acquisition architecture. This allows customers and vision partners to develop custom interfaces for any programmable image source.Direct-Connect TechnologyGigE Vision ® acquisition provide a broad range of digital cameras with attractive features and high performance. Direct-connect technology takes advantage of the latest PC architectures to provide reliable image acquisition without a traditional frame grabber.Frame GrabberBoth Camera Link ® and analog frame grabbers can be used with VisionPro. This provides fail-safe image capture with image buffers, advanced error detection, and dedicated multi-channel hardware.Acquisition AllianceCognex maintains strategic relationships with major camera suppliers through our Acquisition Alliance program. Through the Acquisition Alliance, Cognex establishes cooperative sales and marketing efforts and strong technical relationships, leading to rapid integration of new cameras with VisionPro. Cognex supports hundreds of industrial cameras and videoformats covering the complete range of acquisition requirements typically used in machine vision.TOTAL HARDWARE INDEPENDENCENotes:*1 Cognex Designer is only available with the Development dongle, VC5, CC24 Comm Card, or 8704E GigE Framegrabber*2 3D Measurements Tools are exclusive to the Cognex Displacement Sensor series。
视觉定位软件VisionKit-软件说明书
文件名称:视觉定位软件VisionKit使用说明书文件版本:中文简体版文件页数:共 42 页(含此页)编制:审核:标准化:批准:日期:大族激光科技产业集团股份视觉定位软件VisionKit使用说明书(版本:中文简体版)大族激光科技产业集团股份.hanslaser.声明所有©大族激光科技产业集团股份保留一切权利。
未经大族激光科技股份的许可,任何组织和个人不得擅自摘抄、复制文档容的部分或全部,并不得以任何形式传播。
商标声明和其它大族商标均为大族激光科技产业集团股份的注册商标,并对其享有独占使用、许可使用、转让、续展等各项法定权利,未经大族激光科技产业集团股份允许,任何组织或个人不得在商品上使用相同或类似的商标。
注意在所规定的支持保修围,大族激光科技产业集团股份履行承诺的保修服务,超出所在规定的保修围的,恕不承担保修服务。
对于在使用本产品过程中可能造成的损失,大族激光科技产业集团股份不承担相关责任。
如发生任何争议,应按中华人民国的相关法律解决。
大族激光科技产业集团股份随时可能因为软件或硬件升级对使用说明书的容进行更新,所有这些更新都将纳入使用说明书新的版本中,恕不另行通知。
目录声明 (3)一、软件概述 (5)二、环境安装 (5)2.1环境要求 (5)2.2软件安装 (5)2.2.1 安装halcon基础软件 (5)2.2.2 安装相机驱动软件 (6)2.2.3注册串口通讯组件 (10)2.2.4 VIsionKit软件 (10)三、软件界面介绍 (10)3.1主界面 (10)3.1.1 主界面介绍 (10)3.1运行界面 (13)3.1.1 运行界面介绍 (13)3.2设置界面 (15)3.2.1 图像标定 (16)3.2.2 ROI设置 (18)3.2.3通信设置 (20)3.2.4 LED设置 (21)3.3参数界面 (22)3.3.1编辑定位集 (23)3.3.2定位模板下拉框 (23)3.3.3测试 (24)3.4诊断界面 (25)3.4.1图像操作 (25)3.4.2验证补偿 (27)3.4.3整体补偿 (27)四、CCD工作流程 (28)4.1相机标定 (28)4.2模板制作 (34)4.3生产运行 (38)4.4 误差校正 (40)五、软件操作注意事项 (42)附录A:软件定制功能 (42)附录B:术语解释 (42)附录C:技术支持与服务 (42)一、软件概述视觉定位软件VIsionKit是大族激光科技产业集团股份光纤打标产品线开发的一款定制的机器视觉定位软件,通过CCD视觉定位后将位置偏差数据发送至打标软件系统进行补偿校正打标,实现产品精确定位打标功能。
RDCMVision 视 觉 定 位 打
RDCMVision 视 觉 定 位 打 标 控 制 软 件
操 作 说 明 书
电 话:
:
由于软件升级所造成的实际操作方式、功能设置等,如有与本说明书不符之处,以软件
为准。
目录
目录 ....................................................................................................................................................................... 1 第一章 概述 ....................................................................................................................................................... 46
1.3.1 安装板卡驱动 ................................................................................................................................... 46 1.3.2 安装相机驱动 ................................................................................................................................... 47 1.3.2 视觉打标软件安装 ..................
视觉测量系统简易模式产品说明书
Renton, Washington
NoteM: Aalsl oinnfo, rOmhaiotion
regarding
our
products,
and
in
particular
the
Houston, Texas illustrations, drawings,
dimensional
and
performance
© 2014 Mitutoyo America Corporation, Aurora IL
1.5M 0614-07 Printed in USA, August 2014
O1-n8e88N-uMmITbUeTrOtoYOSe(r1v-e88Y8o-u64B8WH(eC-uote8ntrs8eptteo6rforr9asrtdv)ei,HllMeea,adsNqsuoaarrctthehrusCs)aertotslina
Plymouth, Michigan
Mason, Ohio
Transmitted light: Green LEDOnteeleNceunmtribceilrlutmoinSaetriovne; YCou-axBiaeltLteigrht: White LED; Ring light: quadrant white LED 1-888-MITUTOYO (1-8280±81-6ºC48-8869)
• Alignment of workpiece is automatically located via pattern recognition.
• Provides quick results of features (GO/NG/PASS/FAIL).
QIPAK Simple Mode
VISION中文的使用说明
NI Vision控件模板Vision控件模板位于LabV IEW控件模板的最顶层,由一下元素组成:IMAQ Image.ctl—该控件是一个类型定义,用于声明图象类型的数据。
在V I的前面板中使用该控件代表图象类型数据。
例如,使用该控件作为一个子程序的输入或输出,使调用成成可以将一幅图像传送给子程序。
图像显示(ImageDispla y)—该控件用于在LabVI EW 中直接显示图像。
也可以利用该控件创建关注区域 (ROIs)。
图像显示控件提供标准和3D版两种外观。
IMAQ 视觉控件(IMAQ Vision contro ls)—这里的控件用于将NIVision的程序控件直接加入入用户自己的程序中获得相应的功能。
机器视觉控件(Machin e Vision contro ls)—这里的控件用于将NIVision 的机器视觉控件直接加入到用户自己的程序中以获得相应的功能。
NI Vision函数模板NI Vision for LabVIE W 由三个主要的函数模板组成:常用视觉程序(Vision U tilit ies), 图像处理(ImageProces sing), 和机器视觉(Machin e Vision)。
本节介绍这些模板以及它们的子模板。
常用视觉程序(Vision Utilit ies)常用视觉函数用于在NI Vision中处理和显示图像。
ImageManage ment—管理图像程序组。
利用这些程序可以建立和释放图像,设置和读取图像的属性例如尺寸和偏移量,复制图象。
也可以使用一些高级的V is来定义图像的边框区域以及访问图像数据的指针。
Files—一组使用不同格式读、写图像文件,并从文件中获得所包含的图像的信息的程序模块。
Vi软件操作说明书MO - 150420

Vision Inspector Software User Manual Vision Inspector软件使用说明版本:V1.0修订时间:2014.12说明:本手册适用于具备基础机器视觉知识的人员。
本软件可与Beckhoff、KEBA等机器人控制器直接通讯。
1简介Vison Inspector是一款针对于机器人应用的视觉软件。
用户无需编写代码,通过简单的拖拽等操作即可实现机器人所需的定位功能,将视野范围内目标物体的坐标,角度,产品属性等数据发送给指定控制器,引导机器人快速抓取运动中的目标物体。
Vision Inspector软件具备如下特点:支持多种相机实现坐标变换通过TCP/IP通讯具备流量均衡分配功能与多个机器人控制器协同工作Vision Inspector 软件界面如图1-1所示,右侧为菜单栏及对应命令、参数设置及显示,左侧为图像显示窗口。
图1-1 主界面Vision Inspector软件主菜单命令包括:Calibrate:校正Models:图片处理Matching:模板设置BalancingCamera:相机设置下面的章节内容将手把手教您如何使用Vision Inspector实现拍摄目标物体并将其坐标、角度、产品种类等信息通过TCP/IP正确传输给机器人控制器。
在继续阅读之前,请确保您已做好如下准备工作:1)基本图像处理知识2)一个具备GigE接口的相机及合适的镜头和光源3)一台已安装Vision Inspector软件的控制器4)一台安装有标定针的机器人5)标定纸(中心有十字架的四个圆)6)合格的目标物体2基本操作2.1相机设置确认您的相机已通过网线接入安装了Vision Inspector 软件的控制器。
打开Vision Inspector 软件,左键点击主菜单栏的Camera命令,可设置相机的各种参数。
当鼠标移动至相关参数显示框时,Vision Inspector 软件会自动显示参数的含义,如图2.1-1所示。
1 Smart Vision Development Kit 使用指南说明书
Smart Vision Development KitFAQsVersion 1.3June 16th, 2015I.Revision History:Table of ContentsI. Revision History: (2)II. General Questions: (4)1. What does the SVDK kit include? (4)2. Who are the SVDK partners and what value is supported by them? (4)3. Are other imager boards supported? (5)4. Are other PicoZed modules supported? (5)5. Can the imager board specification be supplied to customers to add their own imager? (5)6. Where do I get technical support? (5)7. Where do I get training? (6)8. Will my firewall cause issues with the demo? (6)9. In the log window of the Sphinx Viewer I see some packet loss indicated, is this normal? (6)10. Can I use every USB3 capable computer? (6)11. In U3V Sphinx Viewer I see Buffer OVERRUN messages in log files. What does it mean? (6)12. How do I re-program the SVDK for different demos? (6)13. Are the software drivers for the Aptina board available? (7)14. Are the evaluation designs on the SVDK time bombed protected? (7)15. Is it possible to use HALCON in combination to Silicon Software’s eVA? (7)16. Where can I get demo/trail version of HALCON? (7)17. Where can I buy Sensor to Image connectivity IP? (7)18. Where can I get evaluation/production version of HALCON? (8)19. Where can I buy HALCON? (8)20. Where can I get evaluation/production version of VisualApplets? (8)21. Where can I get VisualApplets documentation? (8)22. Where can I buy VisualApplets software? (8)III. Contact details: (9)II.General Questions:1.What does the SVDK kit include?⏹Development Board:o PicoZed (Zynq-7015) SOM moduleo Machine Vision Carrier Cardo Aptina 1.2MP camera moduleo Universal Power Adapterso Mini-USB-B to USB-A cableo Ethernet cableo Vivado Design Edition – Device Locked⏹Documentation (All accessed via ):o Quick Starto Getting Started Guideo Hardware User Guide⏹Further information available after registering with Sensor to Image:o Registration: http://www.sensor-to-image.de/index.php/products-mainmenu-33/registrationo Reference designs and easy to use demo instructions for machine vision connectivity from partner Sensor to Image : 1) GigE Vision, USB3Vision & CXP (Coaxpress) o All documentation and .exe files such as the Sphinx viewer software from Sensor to Image (GigE Vision viewer)o The carrier boards and Aptina sensor board schematic (in GERBER) fileso Standard reference design C-sources which includes routines for imager (AR0134) setup and basic controlo Tutorial from Sensor to Imageo Encrypted HDL and source files allowing modification of the reference design▪Video processor block and imager interface HDL (one module) which comes in sources▪Frame buffer, GigE Vision Core and Gigabit EMAC are delivered as encrypted HDL (time bombed evaluation IP)2.Who are the SVDK partners and what value is supported by them?Here is a list of the partners and what they provide for the kit:⏹Xilinx →Provides all programmable FPGA solutions. Zynq-7015 is used on PicoZed SOM.⏹Avnet→ Manufacturer and distributor of the kit⏹MVTec→ Provides demo version of their leading machine vision software, HALCONEmbedded, running on the SVDK with full library functionality. This software is fullyprocessor based.⏹Sensor to Image→ Provides reference designs for innovative machine vision connectivity(GigEVision, USB3Vision, CXP) implemented using their IP cores, support & registrationplatform, backend support on hardware for AVNET/XILINX/MVTEC⏹Silicon Software→ Provides innovative Embedded VisualApplets (eVA) tool as anevaluation version on SVDK for producing accelerated vision systems with a GUIprogramming flow3.Are other imager boards supported?Other imager boards are being planned but at this time only the Aptina imager AR0134 is supported.4.Are other PicoZed modules supported?Yes, PicoZed Zynq-7010 and Zynq-7020 are electrically compatible but with following limitations.⏹When Zynq-7010 PicoZed inserted into the SVDK: PMOD, CXP-In, CXP-OUT, HDMI will notwork⏹When Zynq-7020 PicoZed inserted into the SVDK: CXP-In, CXP-OUT, HDMI will not workFor available machine vision reference design it is necessary to contact ISM marketing to request support using these SOMs.5.Can the imager board specification be supplied to customers to addtheir own imager?Please contact Xilinx if there is interest in obtaining the specification.6.Where do I get technical support?The kit provides an out of the box experience for machine vision users that want to evaluate Zynq. The kit is low cost and does not come with any technical support package from Sensor to Image and the associated designs are supported by Xilinx Worldwide Technical Support (WTS). A tutorial and encrypted HDL files are available from the Sensor to Image web site (after registration) that will help customers take the reference design and adapt into their applications.Below is a quick guide on where to get general support for the Xilinx tools, hardware and questions on the reference designs:⏹Xilinx Vivado tools = Xilinx or Silica FAE and Xilinx WTS⏹Xilinx PetaLinux = Download area for PetaLinux, for customer hardware, can be found here:/PetaLinux⏹PicoZed SoM, = Avnet. Note is a portal for evaluationdocumentation with SVDK, for technical questions not covered by the documentation on this site please contact the relevant partner directly⏹GiGE Vision, USB3 Vision & CXP Reference designso Sensor to Image ticket support system▪Only for SVDK customers that have registered and access granted⏹Some general technical points are covered in this FAQ⏹MVTec HALCON support is as followso Customers need to read FAQ, Getting Started and Tutorialo Customers can contact MVTec directly via their Solutions email address at the bottom of this document7.Where do I get training?The kit is supported with getting started and tutorial documentation. No formal training is available at this time but please contact Xilinx marketing if you wish to register your interest in future events that are being planned.8.Will my firewall cause issues with the demo?Yes the firewall setting on the PC could cause an issue with the demos running. Being able to ping the hardware is not enough as ping, discovery and control channel works regardless the firewall settings, but streaming (runs on different port) is usually blocked by the firewall. The software included adds itself to firewall, but it needs administrator privileges. To test if streaming works we recommend sending a test packet.9.In the log window of the Sphinx Viewer I see some packet lossindicated, is this normal?Yes, as it is likely that the setup on the PC side (receive) is not optimal. GigEVision systems generally make use of a special filter driver that ensure maximum throughput on the PC side. Such a driver is also available from Sensor to Image as a paid item.10.Can I use every USB3 capable computer?Actual performance of USB3 is dependent on USB3 chipset, its connection to the PCIe bus and drivers. Especially USB3 addon board often have poor performance compared to onboard interfaces. So S2I cannot guarantee that the demo design runs on every PC.Official test PC for USB3 Vision certification follows as much as possible to USB-IF’s official test setup and uses a laptop with the Intel HM87 chipset, specifically a Dell Latitude 3440 together with the latest Microsoft XHCI driver.11.In U3V Sphinx Viewer I see Buffer OVERRUN messages in log files.What does it mean?The U3V reference design uses no external memory to buffer data, only a small fifo. If now PC is blocked for some reason and cannot serve the USB interface for a while, this internal fifo overruns and the image is corrupted. To signal this to the application the overrun status flag is set. This may happen on PCs with poor USB performance, see previous question. 12.How do I re-program the SVDK for different demos?The SVDK is provided pre-programmed with the GigE Vision reference design supplied by Sensor to Image. If the user needs to evaluate another IP reference design or a different partner solution then it is necessary to reprogram the SVDK with an appropriate JTAG programming cable. The instructions to do so are included in Getting Started Guide. Such a cable is not included in the kit as every effort has been made to keep the cost of the kit low. It is expected that most designers will already own such a programming cable.13.Are the software drivers for the Aptina board available?The SVDK supports two different drivers depending on the use case:⏹Bare metal implementation with AR0134 sources are provided after registration with Sensorto Image.⏹V4L2, Video for Linux Drivers for the AR0134 are also available on request from Sensor toImage as a paid for item.14.Are the evaluation designs on the SVDK time bombed protected?Yes the partner solutions have the following time out periods⏹Sensor to Image –30 mino Hardware can also support a paid design on the hardware with no time bomb)⏹Silicon Software Embedded Visual Applets –30 min⏹MVTec HALCON software –30 mino SVDK is for evaluation of HALCON only. Contact MVTec for more information on customer implementations on their hardware.15.I s it possible to use HALCON in combination to Silicon Software’seVA?eVA is designed to work in combination with HALCON, i.e. HALCON on the PS of Zynq and eVA in the PL. At this time, there isn’t a demonstration for the SVDK for this but we would encourage dialogue with Silicon Software for customer specific requests.16.Where can I get demo/trail version of HALCON?This will be hosted on Sensor to Image website.Please register here to get username and password for HALCONtrial access.http://www.sensor-to-image.de/index.php/products-mainmenu-33/registrationAccess the below link for demo/trial version:https:///There will be a folder called HALCON.17.Where can I buy Sensor to Image connectivity IP?Please follow the below link:⏹http://www.sensor-to-image.de/index.php/kontaktfomular18.Where can I get evaluation/production version of HALCON? Please contact MVTec below:⏹/halcon/support/19.Where can I buy HALCON?Please follow the below link:⏹/halcon/sales/20.Where can I get evaluation/production version of VisualApplets? Please contact Silicon Software below:⏹/en/contact.html21.Where can I get VisualApplets documentation?Please follow the below link:⏹/en/products/239-va-svdk-en.html22.Where can I buy VisualApplets software?Please follow the below link:⏹/en/sales-menu.htmlIII.Contact details:Please contact your sales representative/FAE or follow the links below: Xilinx Inc./about/contact.htmlAvnet/en-us/contact-us/Pages/default.aspx MVTec (HALCON)*******************Sensor to Imagehttp://www.sensor-to-image.de/index.php/kontaktfomularSilicon Software (Embedded Visual Applets)/en/contact.html。
恒视 vision 产品使用和管理指南说明书
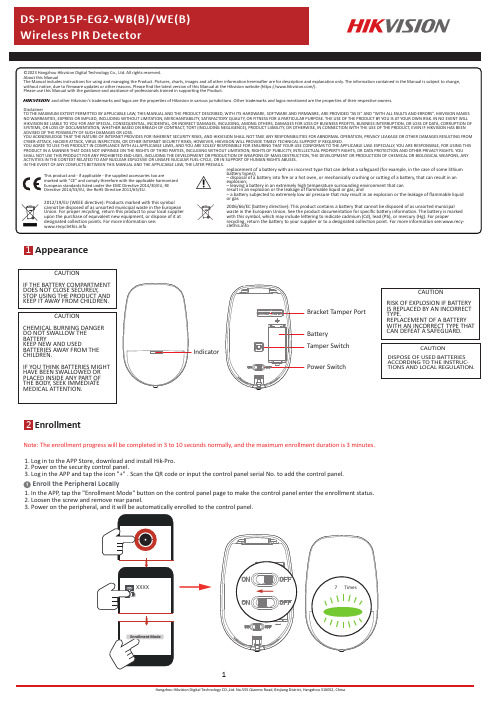
Disclaimer1Appearance2EnrollmentNote:The enrollment progress will be completed in 3to 10seconds normally,and the maximum enrollment duration is 3minutes.1Enroll the Peripheral Locally1.Log in to the APP Store,download and install Hik-Pro.2.Power on the security control panel.3.Log in the APP and tap the icon "+".Scan the QR code or input the control panel serial No.to add the control panel.1.In the APP ,tap the "Enrollment Mode"button on the control panel page to make the control panel enter the enrollment status.2.Loosen the screw and remove rear panel.3.Power on the peripheral,and it will be automatically enrolled to the control panel.CAUTIONRISK OF EXPLOSION IF BATTERY IS REPLACED BY AN INCORRECT TYPE.REPLACEMENT OF A BATTERY WITH AN INCORRECT TYPE THAT CAN DEFEAT A SAFEGUARD.CAUTIONCHEMICAL BURNING DANGER DO NOT SWALLOW THE BATTERYKEEP NEW AND USEDBATTERIES AWAY FROM THE CHILDREN.IF YOU THINK BATTERIES MIGHT HAVE BEEN SWALLOWED OR PLACED INSIDE ANY PART OF THE BODY ,SEEK IMMEDIATE MEDICAL ATTENTION.CAUTIONDISPOSE OF USED BATTERIES ACCORDING TO THE INSTRUC-TIONS AND LOCAL REGULATION.CAUTIONIF THE BATTERY COMPARTMENT DOES NOT CLOSE SECURELY ,STOP USING THE PRODUCT AND KEEP IT AWAY FROM CHILDREN.IndicatorBracket Tamper Port BatteryTamper Switch Power Switch1.Check Signal StrengthEnter the signal checking modethe detector.Solid Green for 3s -Strong Solid Orange for 3s -Medium Solid Red for 3s -Weak Signal Red light flashes for 3S -Failure2.Check the installation environmentNote:Hold the tamper button,and make the device power off and then power on for re-enrollment.3Installation2Enroll the Peripheral with QR and serial No.1.In the APP ,tap the icon "+"and scan the QR code or serial No.on the peripheral.2.Loosen the screw and remove rear panel.3.Power on the peripheral,and it will be automatically enrolled to the control panel.3.Install the DetectorNote:The additional force shall be equal to three times the weight of the equipment but not less than50N.The equipment and its associated mounting means shall remain secure during the installation.After the installation,the equipment, including any associated mounting plate,shall not be damaged.with Screwsa.Knock out the screw holes on the rear panel.with the Sponge TapePaste the device on the wall with sponge tape. b.Secure the rear panel on the wall with four screws.Note:Installing with sponge tape is non ENcompliant.Bracket InstallationCeiling Bracket Fitting (Non EN compliant)Wall Bracket Fitting4TestDetector zones andThe zones and plans of the detector are shown below.Detection Range:FOV 90°,84zones,7levels Mounting Height:1.8to 2.4m (typical 2.1m)Pet Immunity:30Kg4m 8m 12m 15m 010m12m3m 2.4m 2m 1m 0The detector will enter the walk test mode (3minutes)after being enrolled.Trigger the detector within the detection range.If the LED indicator turns blue,the installation position is properly.If the LED indicator is still off,adjust the position of the detector.5Formatting6Set up with AppHold the tamper switch for 8s and power the device on at the same time.The red LED flashes 3times when the formatting operation is completed.Function Zone Type Stay Arm Bypass ChimeEnable Silent Zone Slide to green to enable the chime.Slide to green to make the zone keep silent while alarm is triggered.Select the zone type of the detector.DescriptionYouthe device status including temperature,signal intensity,battery level,lid,arming/disarming,etc.,on the device page.Tap to enter the settings page.Double KnockSlide to green to make the zone alarm with double knock.Cross ZoneSlide to green to bypass the zone from stay arming.If the alarm triggered in both of the linked zones within the set time,two alarm messages will be reported.6Operation Caution and Device Maintenance-All the electronic operation should be strictly compliance with the electrical safety regulations,fire prevention regulations and other related regulations in your local region.-Do not drop the device or subject it to physical shock,and do not expose it to high electromagnetism radiation.Avoid the equipment installation on vibrations surface or places subject to shock (ignorance can cause equipment damage).-Please make sure that the power has been disconnected before you wire,install or dismantle the device.-If smoke,odors or noise rise from the device,turn off the power at once and unplug the power cable,and then please contact the service center.-Do not drop the device or subject it to physical shock,and do not expose it to high electromagnetism radiation.Avoid the equipment installation on vibrations surface or places subject to shock (ignorance can cause equipment damage).-Do not place the device in extremely hot (refer to the specification of the device for the detailed operation temperature),cold,dusty or damp locations,and do not expose it to high electromagnetic radiation.-The device for indoor use shall be kept from rain and moisture.Exposing the equipment to direct sun light,low ventilation or heat source such as heater or radiator is forbidden (ignorance can cause fire danger).-Do not aim the device at the sun or extra bright places.A blooming or smear may occur otherwise (which is not a malfunction however),and affecting the endurance of sensor at the same time.-Improper use or replacement of the battery may result in hazard of explosion.Replace with the same orequivalent type only.Dispose of used batteries according to the instructions provided by the battery manufactur-er.-Do not expose the device to the corrosive gas.Otherwise the equipment damage may occur.-Do not expose the device to the explosive situation.Function DescriptionSensitivitySet the sensitivity of the detector.Higher sensitivity makes the intruder easier to be detected.Swinger limit activationSet the limit times of swinger activition.Trigger Interval,secSet the interval of trigger,and the alarm message will not be repeated within the time.LED Turn On/Off the LED.Polling Rate Set the interval of heartbeat.Signal Strength Test Enter the test mode,and view the LED indication.Detection Zone Test Enter the test mode,and start walk test.Zone BypassBy pass the zone.7SpecificationNote:when the low voltage message appears there will be at least30days of use.。
易感视觉(VISION)说明书
USB HostConnect: Mouse, Keyboard, Memory Stick, HP Printers (PCL)USB ClientConnect VISION to a PC to:• Transfer captured data from VISION to the PC for further analysis and reporting • Use VISION as an interface and capture data using the FREE PC software VGA ConnectionConnect VISION to any standard Projector or Monitor – Essential for teacher led presentations and student trainingHi Resolutionfull colour LCD displayWith the full EasySense software built-in. VISION has everything required to capture, display& analyse data.High Visibility Stylus (or use a finger!)Power Button (Instant on)COMPREHENSIVE • VERSATILE • SIMPLE • COMPATIBLE • RELEVANTOrder Code: 2020Heart Rate and Pulse Waveform Polar Heart Rate Exercise Sensor The SmartQ differenceBeneath SmartQ’s simple and bright exterior is a revolutionary architecture that dramaticallyenhances the intelligence, accuracy and value of our entire range of sensors. Among many of the remarkable improvements of the SmartQ design is the incorporation ➊ Low Cost USB Mini MouseOrder Code: 2031With a rectractable cable foreasy storage.➋ Low Cost USB Wireless Mini Mouse Order Code: 2032➌ Mini USB Keyboard Order Code: 2030An alternative to the on-screen touch keyboard.➍ USB Pen Drive (Memory Stick) Order Code: 2033Offers students a quick and low cost method of taking their experiment results to a PC, either in school or at home.➎ 4 Port USB Hub (Powered) Order Code: 2034Allows the connection of multiple USB devices simultaneously (Keyboard, Mouse, Pen Drive etc.) Carry Case Order Code: 2035Neoprene case, simple and robust design.Please note, VISION will operate with any standard USB Mouse, Keyboard, Pen Drive or USB Hub (Including wireless mice and keyboards etc.)St et ho sc op e ➋➎➍ACCESSORIESSo un d H e a r t R a t e a n d P u l s e W a v e f o r mC a r b o nD io x ide G a s VERSATILE • SIMPLE •SENSORS➌➊。
ADLINK EOS-JNX系列视觉软件功能参考手册说明书
ADLINK Vision Software (AVS) for EOS-JNX SeriesFunction Reference ManualManual Revision: 1.0Revision Date: February 17, 2022Part No: 50M-00066-1000Revision HistoryiiADLINK Vision Software for EOS-JNX SeriesPrefaceCopyright © 2022 ADLINK Technology, Inc.This document contains proprietary information protected by copy-right. All rights are reserved. No part of this manual may be repro-duced by any mechanical, electronic, or other means in any formwithout prior written permission of the manufacturer.DisclaimerThe information in this document is subject to change without priornotice in order to improve reliability, design, and function and doesnot represent a commitment on the part of the manufacturer.In no event will the manufacturer be liable for direct, indirect, spe-cial, incidental, or consequential damages arising out of the use orinability to use the product or documentation, even if advised ofthe possibility of such damages.Environmental ResponsibilityADLINK is committed to fulfill its social responsibility to globalenvironmental preservation through compliance with the Euro-pean Union's Restriction of Hazardous Substances (RoHS) direc-tive and Waste Electrical and Electronic Equipment (WEEE)directive. Environmental Protection is a top priority for ADLINK.We have enforced measures to ensure that our products, manu-facturing processes, components, and raw materials have as littleimpact on the environment as possible. When products are at theirend of life, our customers are encouraged to dispose of them inaccordance with the product disposal and/or recovery programsprescribed by their nation or company.TrademarksProduct names mentioned herein are used for identification pur-poses only and may be trademarks and/or registered trademarksof their respective companies.iiiPrefaceConventionsTake note of the following conventions used throughout this manual to make sure that users perform certain tasks and instructions properly.Additional information, aids, and tips that help users performtasks.Information to prevent minor physical injury, component dam-age, data loss, and/or program corruption when trying to com-plete a task.Information to prevent serious physical injury, componentdamage, data loss, and/or program corruption when trying tocomplete a specific task.iv PrefaceADLINK Vision Software for EOS-JNX SeriesTable of ContentsRevision History (ii)Preface (iii)1Introduction (1)1.1Environment (1)1.2AVS Installation (1)1.3AVS Functions & Parameters (1)1.4AVS Sample Programs (1)1.5AVS Installation Folder (2)1.6Sample Reference Code (2)1.6.1Include Header File (2)1.6.2Get Product Handle (3)2AVS Parameters Reference (5)2.1Product Name (5)2.2Product Features (5)2.3Edge Trigger (5)2.4PoE (6)2.5PoE Power Management (7)2.6DIO Capabilities (7)2.7DI Capabilities (8)2.8DO Capabilities (8)2.9Signal Edge Trigger Type (8)2.10AVS Error Code (9)3Function Library (11)3.1List of Functions (11)3.2Function Library (12)3.2.1Common (12)3.2.2Power over Ethernet (17)3.2.3Digital Input/Output (24)vImportant Safety Instructions (33)Getting Service (37)viIntroduction 1ADLINK Vision Software for EOS-JNX Series1IntroductionADLINK Vision Software (AVS) is the application programming interface (API) for the ADLINK EOS-JNX series of products. AVS allows developers to build applications in Linux via C/C++. Along with the APIs, AVS also includes product drivers and a set of sam-ple programs and documentation.1.1Environment1.2AVS Installation1.3AVS Functions & Parameters1.4AVS Sample Programs1.5AVS Installation Folder1.6Sample Reference Code1.6.1Include Header FileThis code sample shows how to include a header file.#include "/usr/local/include/ADLINK/AVS/AVS_SDK.h"#include "/usr/local/include/ADLINK/AVS/Common/I_common.h"2 IntroductionADLINK Vision Software for EOS-JNX Series1.6.2Get Product HandleThis code sample shows how to get the product handle andproduct Information.using namespace std;/*Show SDK Information*/char buffer[256];if (AVS_GetSDKInfo(buffer, sizeof(buffer)) ==AVS_FUN_SUCCESS)cout << buffer << endl;.../*Show Product Information*/unsigned int nums = AVS_GetProductNums();if (nums <= 0){cout << "Find no device!" << endl;return 0;}void* handle;unsigned int devIndex = 0;handle = AVS_GetProductHandle(devIndex);if (!handle){cout << "AVS_GetProductHandle Error\n" <<endl;return 0;}if (AVS_GetProductInfo(handle, buffer,sizeof(buffer)) == AVS_FUN_SUCCESS)cout << buffer << endl;...3IntroductionThis page intentionally left blank.4 IntroductionADLINK Vision Software for EOS-JNX Series2AVS Parameters ReferenceAVS parameters are grouped by enumerations and can be found in the header file “I_common”.2.1Product NameADLINK vision products supported by AVS SDK are grouped by AVS_PRODUCT_TYPE.2.2Product FeaturesAVS parameters are grouped by AVS_FEATURE_TYPE.2.3Edge TriggerEdge Trigger parameters are defined byAVS_ EDGETRIGGER_TYPE.AVS Parameters Reference 52.4PoEPoE parameters are defined by AVS_POEPROPERTY_TYPE.6AVS Parameters ReferenceADLINK Vision Software for EOS-JNX Series 2.5PoE Power ManagementPoE Power Management parameters are defined byAVS_POEPORTPROPERTY_TYPE.2.6DIO CapabilitiesDIO Capability parameters are defined byAVS_DIOCAPABILITY_TYPE.AVS Parameters Reference 72.7DI CapabilitiesDI Capability parameters are defined byAVS_DIODICAPABILITY_TYPE.2.8DO CapabilitiesDO Capability parameters are defined byAVS_DIODOCAPABILITY_TYPE.2.9Signal Edge Trigger TypeSignal Edge Trigger Type parameters are defined byAVS_EDGETRIGGER_TYPE.8AVS Parameters ReferenceADLINK Vision Software for EOS-JNX Series 2.10AVS Error CodeAn AVS error code is defined by AVS_FUN_RETURNVAL. No error occurs if the API returns a value >= 0, or a negative value.AVS Parameters Reference 9This page intentionally left blank.10AVS Parameters ReferenceADLINK Vision Software for EOS-JNX Series 3Function Library3.1List of FunctionsFunction Library 113.2Function LibraryAVS supports the C/C++ programming languages. The following are examples of the C/C++ library.3.2.1CommonThese functions are used to get the product handle and retrieve device information.3.2.1.1AVS_GetProductNums12 Function LibraryADLINK Vision Software for EOS-JNX Series 3.2.1.2AVS_GetSDKInfo3.2.1.3AVS_GetProductHandleFunction Library 133.2.1.4AVS_GetProductInfo14 Function LibraryADLINK Vision Software for EOS-JNX Series 3.2.1.5AVS_GetProductType3.2.1.6AVS_GetProductSN3.2.1.7AVS_GetFeatureListADLINK Vision Software for EOS-JNX Series 3.2.2Power over EthernetThis feature is for SmartPoE, the PoE power management func-tions.3.2.2.1AVS_PoEGetPortNums3.2.2.2AVS_PoESetPortEnable3.2.2.3AVS_PoEGetPortEnableADLINK Vision Software for EOS-JNX Series 3.2.2.4AVS_PoESetPowConsumCalcModel3.2.2.5AVS_PoEGetPowConsumCalcModel3.2.2.6AVS_PoESetProtectTempRangeADLINK Vision Software for EOS-JNX Series 3.2.2.7AVS_PoEGetProtectTempRange3.2.2.8AVS_PoEGetPropertyADLINK Vision Software for EOS-JNX Series 3.2.2.9AVS_PoEGetPortProperty3.2.3Digital Input/OutputThe AVS SDK DIO feature is used to control and configure digital input and output. AVS_DIOGetCapability(),AVS_DIOGetDICapability() and AVS_DIOGetDOCapability() are used to check the supported functions of each product. The digital output can be a general digital output or a triggerable device in the AVS SDK.3.2.3.1AVS_DIOGetCapabilityADLINK Vision Software for EOS-JNX Series 3.2.3.2AVS_DIOGetDINums3.2.3.3AVS_DIOGetDONumsFunction Library 253.2.3.4AVS_DIOGetDICapability26 Function LibraryADLINK Vision Software for EOS-JNX Series 3.2.3.5AVS_DIOGetDOCapabilityFunction Library 273.2.3.6AVS_DIOSetDOState3.2.3.7AVS_DIOSetDOStates28 Function LibraryADLINK Vision Software for EOS-JNX Series 3.2.3.8AVS_DIOGetDIState3.2.3.9AVS_DIOGetDIStatesFunction Library 293.2.3.10AVS_DIOSetDITriggerCallback30 Function LibraryADLINK Vision Software for EOS-JNX Series 3.2.3.11AVS_DIOSetDIEdgeTriggerFunction Library 313.2.3.12AVS_DIOGetDIEdgeTrigger32 Function LibraryADLINK Vision Software for EOS-JNX Series Important Safety Instructions For user safety, please read and follow all instructions, Warnings, Cautions, and Notes marked in this manual and on the associated device before handling/operating the device, to avoid injury or damage.S'il vous plaît prêter attention stricte à tous les avertissements et mises en garde figurant sur l'appareil , pour éviter des blessures ou des dommages.X Read these safety instructions carefullyX Keep the User’s Manual for future referenceX Read the Specifications section of this manual for detailed information on the recommended operating environment X The device can be operated at an ambient temperature of 50ºCX When installing/mounting or uninstalling/removing device;or when removal of a chassis cover is required for user ser-vicing:Z Turn off power and unplug any power cords/cablesZ Reinstall all chassis covers before restoring power X To avoid electrical shock and/or damage to device:Z Keep device away from water or liquid sourcesZ Keep device away from high heat or humidityZ Keep device properly ventilated (do not block or cover ventilation openings)Z Always use recommended voltage and power sourcesettingsZ Always install and operate device near an easily acces-sible electrical outletZ Secure the power cord (do not place any object on/over the power cord)Z Only install/attach and operate device on stable surfaces and/or recommended mountingsX If the device will not be used for long periods of time, turn off and unplug from its power sourceImportant Safety Instructions 3334 Important Safety Instructions XNever attempt to repair the device, which should only be serviced by qualified technical personnel using suitable tools X A Lithium-type battery may be provided for uninterruptedbackup or emergency power.XThe device must be serviced by authorized technicians when:Z The power cord or plug is damaged Z Liquid has entered the device interior Z The device has been exposed to high humidity and/or moisture Z The device is not functioning or does not function according to the User’s Manual Z The device has been dropped and/or damaged and/or shows obvious signs of breakage XDisconnect the power supply cord before loosening the thumbscrews and always fasten the thumbscrews with a screwdriver before starting the system up XIt is recommended that the device be installed only in a server room or computer room where access is:Z Restricted to qualified service personnel or users familiar with restrictions applied to the location, reasons therefor, and any precautions required Z Only afforded by the use of a tool or lock and key, or other means of security, and controlled by the authority responsible for the location X If PoE (Power over Ethernet) is enabled for the device, thesystem can ONLY be deployed indoors. Unless otherwise noted, the PoE system is NOT designed to withstand the rigors of outdoor use.Risk of explosion if battery is replaced with one of an incorrect type; please dispose of used batteries appropriately.Risque d’explosion si la pile est remplacée par une autre de type incorrect. Veuillez jeter les piles usagées de façon appro-priée.ADLINK Vision Software for EOS-JNX SeriesImportant Safety Instructions 35This page intentionally left blank.36Important Safety InstructionsADLINK Vision Software for EOS-JNX SeriesGetting ServiceAsk an Expert:ADLINK Technology, Inc.No. 66, Huaya 1st Rd., Guishan DistrictTaoyuan City 333411, TaiwanTel: +886-3-216-5088Fax: +886-3-328-5706Email:**********************Ampro ADLINK Technology, Inc.6450 Via Del OroSan Jose, CA 95119-1208, USATel: +1-408-360-0200Toll Free:+1-800-966-5200 (USA only)Fax: +1-408-600-1189Email:*******************ADLINK Technology (China) Co., Ltd.300 Fang Chun Rd., Zhangjiang Hi-Tech ParkPudong New Area, Shanghai, 201203 ChinaTel: +86-21-5132-8988Fax: +86-21-5132-3588Email:*********************ADLINK Technology GmbHHans-Thoma-Straße 11D-68163 Mannheim, GermanyTel: +49-621-43214-043214-30Fax: +49-621Email:*******************Please visit the Contact page at for informa-tion on how to contact the ADLINK regional office nearest you:Getting Service 37。
视觉自动点胶机软件说明书
视觉自动点胶机软件说明书目录注意事项: (03)软件说明: (03)第一章:软件安装 (04)第二章:软件简介 (11)第三章:文件操作 (13)第四章:编程操作 (14)第五章:编程方法(双Mark点) (22)第六章:参数设置 (35)第七章:图像 (44)第八章:测试 (51)第九章:生产 (53)第十章:系统 (57)附:维护保养 (59)附:常见问题 (59)注意事项●请保管好光盘内的所有资料,建议用户将光盘内的资料拷贝到电脑里,以防丢失。
●本软件的启动需要USB密钥支持,建议将USB密钥插入电脑机箱后USB接口。
●请保管好USB密钥。
若USB密钥丢失,用户需重新购买。
●本书只提供软件的使用方法,硬件及其电气恕不作说明。
●因用户使用、操作不当造成机器损坏的,本公司既不负相关责任。
●使用前应把电脑系统时间调为当前正确时间,以便软件数据时间能正确显示和记录。
●电脑为机器专用,请勿在本软件使用时开启其它应用程序,以免影响本软件工作。
●请勿将有木马、病毒的U盘插入电脑,某些电脑病毒可能会影响软件的正常使用。
电脑最好装杀毒软件,并定时杀毒。
●请爱护、保养好机器,机器定期保养可维持其最佳性能。
●由于软件版本升级等原因,说明书与软件实际操作可能会有出入,请以软件最新版操作为准。
软件信息:●名称:视觉自动点胶机/Vision Dispenser●版本:4.370●安装包大小:约120MB●支持语言:简体中文/英文(美国)●支持系统●支持机型:在线式/落地式/桌面式/桌面式双Y轴/带旋转轴机器●支持胶阀:普通胶阀/喷射阀/AB胶双液阀●支持相机:德鸿/堡盟(Baumer)/巴斯勒(Basler)●支持运动控制卡:固高GT/固高GTS/运动控制器●支持光源控制器:华周(HZ)/菲视特(FST)/奥普特(OPT)●支持运动轨迹类型:单点/直线/圆弧/圆形/三维直线/三维圆弧/连续轨迹插补/四轴联动●支持Mark点类型:单Mark点/双Mark点/多Mark点●支持Mark识别方式:圆/矩形/椭圆/三角形/圆环/直角/任意形状●支持导入文件类型:CAD文件(dxf格式)/贴片机文件(Pick & Place)●支持扩展外接设备:测高仪/扫码枪/电子称/自动对针●支持扩展外接通讯:IO通讯/串口通讯/网络通讯/文件共享●最多支持控制轴数:6●最多支持控制IO数:24路输入、24路输出。
全能视觉软件说明书(视觉)2015.9.28

视觉联机激光控制软件-使用说明书-深圳市智远数控有限公司目录上层软件使用操作说明第一章驱动和软件的安装 (2)1.1 数控系统软件简介 (3)1.2 控制系统的组成 (3)1.3 驱动和软件的安装 (3)1.3.1视觉驱动MIL的安装与卸载 (4)1.3.2视觉切割软件的安装 (10)1.4软件特点 (13)1.5单反相机应用步骤 (14)1.6界面说明 (15)第二章设备参数的设置 (17)第三章工作面板 (21)3.1 图层管理 (21)3.2 手动控制 (23)3.2.1标定管理 (24)3.2.2 模版切割设置 (29)3.2.3 寻边切割设置 (38)3.2.4寻边切割功能对材料要求 (40)3.3设备控制 (40)3.4加工信息 (41)底层软件/硬件使用说明及接线 (42)第一章概述 (42)1.1 系统功能 (42)第二章安装接线说明 (43)2.1 安装尺寸 (43)2.2 接线说明 (44)2.21 接口板 (44)2.22 接线图 (44)2.3 端口定义说明 (47)2.32 U盘接口 (48)2.33 PC接口 (48)2.34 网络接口 (48)2.35 端口定义 (48)第三章常见问题排除 (51)3.1 电脑连接问题 (51)3.2 U盘读写问题 (51)3.3 相机连接问题 (51)3.4 问题现象: (51)3.5 机器不动作 (52)第四章经典激光切割机接线图 (53)4.1 标准激光切割机接线图 (53)第一章驱动和软件的安装1.1 数控系统软件简介PowerCut视觉激光切割控制软件是深圳市智远数控有限公司集多年行业经验、业内知名研发团队精心打造的一款激光切割数控精品。
该软件简单易学、运动控制算法成熟稳定、切割工艺完备、人机交互界面友好,适用于服装、亚克力、家俱等非金属激光切割控制。
1.2 控制系统的组成控制系统由硬件(运动控制卡及配件)和软件两部分组成。
视觉定位打标使用手册
ur-softv5.3 (视觉定位打标)用户手册第1章序言谢谢你选用我司视觉定位打标系统—ur welding!该手册对控制系统中提供的功能做详细的解释与说明。
手册的说明如未与控制系统的实际功能同步更新时,请以控制系统提供的功能为准。
给您带来不便,敬请谅解!任何时候有需要,请联系设备供应商。
第2章软件与驱动安装2.1软件的安装ur welding为绿色版软件,免安装。
直接拷贝文件夹到指定磁盘位置或将文件夹中的所有文件拷贝到目的文件夹即可。
2.2加密狗驱动的安装将软件狗插入电脑的USB接口,找到ur-welding软件所在文件夹下的Driver文件中的HASPUserSetup.exe,鼠标双击执行,弹出如图2.2.1对话框:图2.2.1开始软件狗驱动安装连续选择两次“Next>”,完成安装。
如图2.2.2。
图2.2.2软件狗驱动安装完成2.3振镜卡驱动的安装安装振镜卡驱动前,请先确认振镜卡已与电脑连接。
右键单击“我的电脑”,左键单击“管理”,弹出系统管理窗口,如图2.3.1所示。
图2.3.1在系统管理窗口中,选择“性能”->“设备管理器”,在设备管理器列表中扫描检测硬件改动,在“其它设备”里选中对应设检测到的新设备,右击选择“更新驱动程序软件”。
如图2.3.2。
图2.3.2选择“浏览计算机以查找驱动程序软件”,点击“浏览”,找到对应的驱动程序。
如图2.3.3图2.3.3点击“下一步”直至软件安装成功。
如图2.3.4。
图2.3.4此时,可在设备管理其中查看到硬件设备。
如图2.3.5。
如图2.3.52.4相机驱动的安装找到软件所在文件夹内的Driver文件夹,鼠标双击执行MCam30_SDK(32bit)_V3.0.0.8.exe,如下图所示:图2.4.1连续选择两次“Next”,弹出如图2.4.2对话框:图2.4.2点击“Install”,到如图2.4.3:图2.4.3连续点击两次“下一步”,到如图2.4.4:图2.4.4点击“我接受”,到如图2.4.5:图2.4.5点击“下一步”,到图2.4.6:图2.4.6点击“安装”,“完成”,图2.4.7:图2.4.7找到软件所在文件夹内的Driver文件夹,鼠标双击执行MCamU_Basic_2.1.1.1_x86.exe,弹出如图1.4.8对话框:连续点击两次“Next”,进入图2.4.9:图2.4.9点击“Install”,完成安装。
PTV Vision VISUM软件用户手册说明书
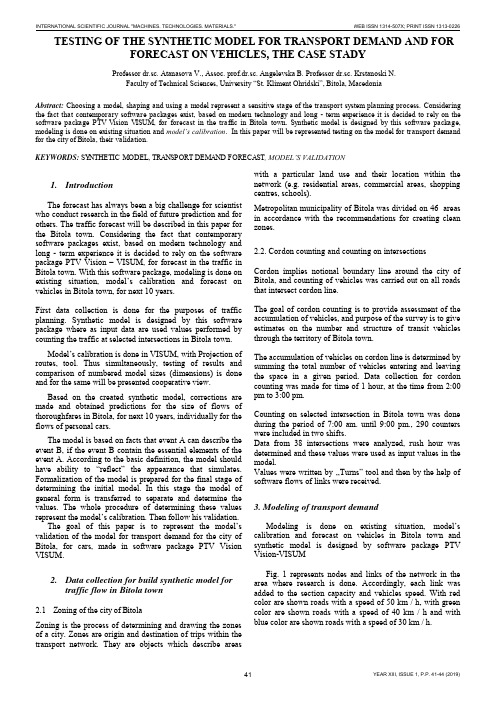
TESTING OF THE SYNTHETIC MODEL FOR TRANSPORT DEMAND AND FOR FORECAST ON VEHICLES, THE CASE STADYProfessor dr.sc. Atanasova V., Assoc. prof.dr.sc. Angelevska B. Professor dr.sc. Krstanoski N.Faculty of Technical Sciences, University “St. Kliment Ohridski”, Bitola, MacedoniaAbstract: Choosing a model, shaping and using a model represent a sensitive stage of the transport system planning process. Considering the fact that contemporary software packages exist, based on modern technology and long - term experience it is decided to rely on the software package PTV Vision VISUM, for forecast in the traffic in Bitola town. Synthetic model is designed by this software package, modeling is done on existing situation and model’s calibration. In this paper will be represented testing on the model for transport demand for the city of Bitola, their validation.KEYWORDS: SYNTHETIC MODEL, TRANSPORT DEMAND FORECAST, MODEL’S VALIDATION1.IntroductionThe forecast has always been a big challenge for scientist who conduct research in the field of future prediction and for others. The traffic forecast will be described in this paper for the Bitola town. Considering the fact that contemporary software packages exist, based on modern technology and long - term experience it is decided to rely on the software package PTV Vision – VISUM, for forecast in the traffic in Bitola town. With this software package, modeling is done on existing situation, model’s calibration and forecast on vehicles in Bitola town, for next 10 years.First data collection is done for the purposes of traffic planning. Synthetic model is designed by this software package where as input data are used values performed by counting the traffic at selected intersections in Bitola town.Model’s calibration is done in VISUM, with Projection of routes, tool. Thus simultaneously, testing of results and comparison of numbered model sizes (dimensions) is done and for the same will be presented cooperative view.Based on the created synthetic model, corrections are made and obtained predictions for the size of flows of thoroughfares in Bitola, for next 10 years, individually for the flows of personal cars.The model is based on facts that event A can describe the event B, if the event B contain the essential elements of the event A. According to the basic definition, the model should have ability to “reflect” the appearance that simulates. Formalization of the model is prepared for the final stage of determining the initial model. In this stage the model of general form is transferred to separate and determine the values. The whole procedure of determining these values represent the model’s ca libration. Then follow his validation.The goal of this paper is to represent the model’s validation of the model for transport demand for the city of Bitola, for cars, made in software package PTV Vision VISUM.2.Data collection for build synthetic model fortraffic flow in Bitola town2.1Zoning of the city of BitolaZoning is the process of determining and drawing the zones of a city. Zones are origin and destination of trips within the transport network. They are objects which describe areas with a particular land use and their location within the network (e.g. residential areas, commercial areas, shopping centres, schools).Metropolitan municipality of Bitola was divided on 46 areas in accordance with the recommendations for creating clean zones.2.2. Cordon counting and counting on intersectionsCordon implies notional boundary line around the city of Bitola, and counting of vehicles was carried out on all roads that intersect cordon line.The goal of cordon counting is to provide assessment of the accumulation of vehicles, and purpose of the survey is to give estimates on the number and structure of transit vehicles through the territory of Bitola town.The accumulation of vehicles on cordon line is determined by summing the total number of vehicles entering and leaving the space in a given period. Data collection for cordon counting was made for time of 1 hour, at the time from 2:00 pm to 3:00 pm.Counting on selected intersection in Bitola town was done during the period of 7:00 am. until 9:00 pm., 290 counters were included in two shifts.Data from 38 intersections were analyzed, rush hour was determined and these values were used as input values in the model.Values were written by ,,Turns” tool and then by the help of software flows of links were received.3. Modeling of transport demandModeling is done on existing situation, model’s calibration and forecast on vehicles in Bitola town and synthetic model is designed by software package PTV Vision-VISUMFig. 1 represents nodes and links of the network in the area where research is done. Accordingly, each link was added to the section capacity and vehicles speed. With red color are shown roads with a speed of 50 km / h, with green color are shown roads with a speed of 40 km / h and with blue color are shown roads with a speed of 30 km / h.Figure 1.Graphic display of roads network with different speed.First, in the proces of modeling in exsiting situation,for the purposes of the model is further zoning done. The main area include a different number of zones, so there are 46 zones. Fig. 2 represented the main zones (total 13) with blue, zones (total 40) with green and zones outside the city (total 6) with red color.Figure 2.Separation of the major areas in Zones.Second, we did choosing a model forecast of transport demand. The formulation of the model depends on the initial sizes and input variables that will encompass. The basic definition is that the model should have the ability to "reflect" the appearance that simulates.As input sizes in synthetic model are used the values of the counting of traffic at selected intersections, marked in red and shown on Fig. 3. Also are used data from cordon counting (cordon counting results are given in Section 2.2).Figure 3.Intersections counting in the area where research is done. Model’s calibration is done in VISUM, with Projection of routes, tool. The goal of calibration is bringing on counting and modals sizes together. Thus simultaneously, testing of results and comparison of numbered model sizes (dimensions) is done.Following comparative display of counting values (green color) and model’s sizes (in red) for personal cars.Figure 4.Counted values for cars on intersections, calculate in Visum, presented in sections.Figure 5.Modal values for cars on all network - existing situation.Figure 6.Counted and modal values for cars - existing situation.4. Forecast of traffic flow in Bitola townForecast is scientific prediction of some phenomena that are of great importance to human society. Based oncreatedsynthetic model, corrections are made and forecast on vehicles in Bitola town, for next 10 years.In the process of forecast the increase of 2% annually is taken into account. For the zones 26 and 27, taking into account the DUP (detailed urban plan) in this part of town, taken a balanced growth of 3% annually for the next years, in the process of forecast on vehicles for next 10 years.Figure 7.Forecast on vehicles in Bitola town, for next 10 years.Illustrative, in particular section would look like this: The section between the two junctions Partizanska –Toso Daskalot and Partizanska – Gorgi Naumov, are counted 555 vehicles, while the model gives us the value of 504 vehicles. The projected forecast for 10 years, obtained 651 vehicle.On Fig. 8 counted values are represented by green, and red-values obtained model sizes.Figure 8.An illustrated example for the section Partizanska - Ivo Lola Ribar and Partizanska –VaskoKarangelevski.Figure 9.Forecast on vehicle for next 10 years, on an illustrated example for the section Partizanska -Ivo Lola Ribar and Partizanska –VaskoKarangelevski.5.Model’s validationIn the frame of data collected analysis, in the traffic engineering practice often are used different statistical tests. Common used tests are the following:∙Testing the reliability of the sample,∙Compared or ,,Before and after” tests,∙Unparametric tests.In the actual study model’s validation is made according to the international standards. The cost of the reliability of the model is made according to the Design Manual for Roads and Bridges, Vol 12a, which is released the English Department for Transport. Model is good if it meets the following criteria:∙85% of obtained modal val ues shouldn’t have values of GEH greater than 5. The statistic method GEH isshape of the X2test, which is calculate with thefollowing formula:)(5,0)(2iriiriyyyyGEH+⋅-=Where:- y ri – is traffic flow from the model- y i – is counting traffic flow∙When the maximum deviation is 15%, deviations of modal from the counted values is according to thefollowing criteria:−for flows less than 700 veh/h, difference can be at most 100 veh/h−for flows from 700 to 2000 veh/h, difference can be most to 15%−For flows greater from 2700 veh/h, difference can be at most 400 veh/h.Testing the model, with Assignment analysis tool in software package PTV Vision Visum, got values from 92% (Photo 1) which is quite high value and indicate suitability for modal used.Standard deviation is:99,62)(2=-=∑nyyS iriywhich is as full acceptable value.Photo 1: Model’s validation6.ConclusionUsing the software package PTV Vision –VISUM we made forecast on vehicles in Bitola town, for next 10 years, based on a lot of input data, we got investigation outreach and data collection. We made comparative analyses of counted, modal and forecasted values. From output results can conclude that have an acceptable deviation of modals values from counted values that mean suitability for modal’s usage.Model testing, with Assignment analysis tool in software package PTV Vision Visum, indicate suitability for modal used. In output results for GEH are got values 0 and 1 which is smaller than 5, and with this is meet criteria obtained modal values to have values of GEH smaller than 5. Because this criteria is meet, that means that the model is good. For standard deviations is obtained value 62,99 which is as full acceptable. In this paper are represented photos which represented counted values for cars on intersections, calculate in Visum, presented in sections and obtained modal values for cars on all network.REFERENCES[1] Atanasova V., Ph. D., M.S.E., grad. traffic. Eng."Transport datacollection and analysis", internal lectures, University "St.Kliment Ohridski ", Faculty of Technical Sciences, Bitola, 2011.[2] Atanasova, V., Detelbach, S., Markovik, l., HANDBOOK PTVVision VISUM, Faculty of Technical Sciences, Bitola, 2012 [3] Traffic study for Bitola town, Agreement number 08-1124/1,from 03.06.2010, during one year (June 1 2010 to June 2011). [4] General urban plan of the city of Bitola, I book, Institute ofUrban Planning and Design, LLC, Bitola, Bitola, 1999.[5] Vaska Atanasova, Ph. D., M.S.E., grad. traffic. Eng."TrafficPlanning", internal lectures, University"Ss.Kliment Ohridski ", Faculty of Technical Sciences, Bitola, 2010.[6] Towards sustainable urban transport policies, Recommendationfor local authorities, SMILE project, European Commission, 2004.[7] PTV America, VISUM User Manual, Version 7.50. 2. MODELDESCRlPTlON. 2.1. Network Model. 2-3. 2.1.1. Transport systems, April 2001.。
Viskon7木结构设计软件教程
Weto AG培训课程Viskon V7第一章: Viskon 基础知识1.1 新建,打开,保存 及自动备份在Viskon 中,您可以通过新建项目进行三维模型的绘制,并通过设置自动备份来进行项目的保护以及保存。
当我们需要继续绘制之前项目的时候,我们可以通过打开功能来继续模型的绘制。
在自动备份功能中,我们可以设置软件自动保存的时间间隔为1小时或者其它时间。
自动保存的文件数量为1份或者其它数量。
1.2 操作界面/ 功能键布局1.3 单位设置及其它预设置Viskon 的默认长度单位为厘米,同时软件增设了毫米、分米、米、英寸、英尺、码等长度单位供用户进行选择,并可设置保留小数点后几位数字。
具体步骤:菜单栏 → 设置 → 设置单位长度。
1.4 三维图与二维图纸之间的转换在软件操作界面的右上角视图栏中有三维视图、俯视图、左视图、右视图、前视图、后视图、透视图等命令供用户进行二维图与三维图之间进行切换。
标题栏 菜单栏 工具栏 创建工作区命令指示栏视图栏图层栏绘图栏第二章:基本绘图2.1掌握绘图基本流程:新建项目→建立基础平板→插入CAD平面图(或手动绘制二维墙体辅助线)→建立辅助墙体→调整转角链接→生成实际墙体→插入并调整门窗→屋顶助手绘制屋顶(或者用五点法)→插入桁架→模型完成2.2了解楼层、结构段、图层的概念楼层:在Viskon中有一个楼层管理。
它可以创建多个不同水平高度的楼层,并且显示或隐藏每一个楼层。
结构段:可以和楼层相类似地进行运用。
通过结构段可以使得楼层更好地被划分。
(比如,楼层=顶楼,结构段1=墙体,结构段2=屋顶)图层:其实就是可自定义的建筑部件独立组。
图层1 (A轴墙)结构段1 (墙体)楼层图层2 (B轴墙)结构段2 (屋架)2.3基础平板/平面的建立、移动及调整:在Viskon新建项目时会要求生成一块基础底板或平面,以便项目的绘制。
可通过选择点及复制来建立新的底板或平面。
删除开口:在此可以删除一个存在于平板/平面的开口。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
视觉定位软件V i s i o n K i t软件说明书 HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】文件名称:视觉定位软件VisionKit使用说明书文件版本:中文简体版文件页数:共 42 页(含此页)编制:审核:标准化:批准:日期:大族激光科技产业集团股份有限公司视觉定位软件VisionKit使用说明书(版本:中文简体版)大族激光科技产业集团股份有限公司声明版权所有 ? 大族激光科技产业集团股份有限公司保留一切权利。
未经大族激光科技股份有限公司的许可,任何组织和个人不得擅自摘抄、复制文档内容的部分或全部,并不得以任何形式传播。
商标声明和其它大族商标均为大族激光科技产业集团股份有限公司的注册商标,并对其享有独占使用、许可使用、转让、续展等各项法定权利,未经大族激光科技产业集团股份有限公司允许,任何组织或个人不得在商品上使用相同或类似的商标。
注意在所规定的支持保修范围内,大族激光科技产业集团股份有限公司履行承诺的保修服务,超出所在规定的保修范围的,恕不承担保修服务。
对于在使用本产品过程中可能造成的损失,大族激光科技产业集团股份有限公司不承担相关责任。
如发生任何争议,应按中华人民共和国的相关法律解决。
大族激光科技产业集团股份有限公司随时可能因为软件或硬件升级对使用说明书的内容进行更新,所有这些更新都将纳入使用说明书新的版本中,恕不另行通知。
目录一、软件概述视觉定位软件VIsionKit是大族激光科技产业集团股份有限公司光纤打标产品线开发的一款定制的机器视觉定位软件,通过CCD视觉定位后将位置偏差数据发送至打标软件系统进行补偿校正打标,实现产品精确定位打标功能。
视觉定位打标系统通常由CCD定位软件、具有数据通讯和偏位补偿功能的打标软件系统、以及数据通讯网络(COM232或IP/TCP网络)等三大模块组成。
二、环境安装环境要求操作系统:Windows XP以上,推荐Windows 7(32)位系统,暂不支持64位系统。
最低硬件配置:CPU:赛扬1G以上;内存:至少1GB,建议2GB以上;硬盘:至少500MB可用空间,建议预留更多的可用空间。
软件安装安装halcon基础软件(1)如下图示分别需要安装和。
(2)注意事项:安装过程中需要勾选安装如下驱动,其他选择默认安装即可。
安装相机驱动软件(1)根据相机类型选择如下驱动安装。
(2)安装相机驱动程序等待安装进度完成:选择安装Vimba驱动:等待驱动安装完成安装OK,即可测试连接相机:注册串口通讯组件注册串口控件,当打开软件异常无反应时,需要注册下串口OCX控件,见下图。
运行程序,选择注册组件。
VIsionKit软件三、软件界面介绍主界面主界面介绍1、开启视频。
点击后,CCD会实时拍照,按钮切换显示为“停止视频”;2、单张抓取。
CCD进行一次拍照;3、用户登录。
进行权限编辑。
如下图:4、产品文档管理。
添加和编辑用户不同的产品文档信息。
如下图:5、工具栏。
软件的主体功能区,下面会详细介绍。
运行界面运行界面介绍1、如上图,点击开始运行,即代表软件进行待生产模式。
2、点击红框处停止运行,软件即停止运行。
设置界面图像标定如上图: 在进行标定时,需选择适当的参数提取黑圆或者白圆,获取中心,并与激光坐标一同创建一个坐标系矩阵,用于坐标换算。
以下讲解标定详细过程:1、鼠标单击画ROI按钮;2、在图像窗口中绘制一个包含六个标定点的矩形框;3、选取适当的参数提取白色圆;4、点击“识别圆心”,即获取到6个白色圆心坐标;5、单击“获取激光数据”,即获取到相对应的激光坐标,如下图:6、点击“标定”,即生成矩阵文件,完成标定,如下图:标定完成。
ROI设置1、工位的选择。
每个工位都是一组独立的数据;2、选择绘制的类型,矩形或者圆,如下图:3、操作运算。
在绘制的选择上,可以选择交集、并集和差集的逻辑方式。
可实现复杂图形的绘制;4、区域组的选择。
每个工位可绘制N个区域,添加工位的方法如下图:5、区域显示列表。
显示已经添加的区域;6、区域列表编辑栏。
可进行区域的删除、保存和测试操作。
通信设置1、通讯方式的选择。
可选择“串口控件方式”和“拷贝内存方式”;2、串口控件的参数设置。
可进行串口号、波特率、校验位、数据位等等操作;3、发送数据和接收数据通讯测试栏。
LED设置1、工位的选择。
每个工位都有独立的光源参数;2、软件控制光源的串口控件编辑;3、光源参数的设置。
通道数一般为2或者4,设置亮度值,然后点击“设置”按钮,即可应用和保存;4、相机的曝光值。
可设置相机的曝光值,值越大图像越亮,但同时噪点会变多。
参数界面编辑定位集1、点击“编辑定位集”按钮,弹出定位集管理对话框,可进行增删改查操作。
定位模板下拉框1、显示已经制作完成的模板名称。
测试1、所有流程设置完成后,点击“测试”按钮,即可获取物料定位的信息。
诊断界面图像操作1、打开图像,如下图:2、保存图像,如下图:3、“离线”按钮的勾选。
当手动打开一幅图像,需要处理时,可选择“离线”模式。
此模式下,CCD不进行采图,而是处理手动打开的图像。
验证补偿1、工位的选择。
所有工位的补偿值都是独立的;2、区域组的选择。
每个工位可以有多个区域,当然也就多个补偿值参数;3、开启单点验证。
鼠标在CCD显示界面左键单点,然后激光会在单点的位置打一个十字叉;4、如发激光打出来稍有偏差,可在此进行补偿;5、放大显示打出的十字叉,可直观的查看偏差与否。
整体补偿1、整体补偿是单个工位内所有的工作区域一同补偿;2、一键将补偿值应用到所有工位;3、一键将单工位补偿值归零。
四、CCD工作流程相机标定标定需准备如下工作:先分别设置打标软件和视觉VisionKit软件的串口参数。
再打标软件加载6点标定图档,在准备好的打标板上进行普通打标。
打标完成后,取消勾选“启用标准软件功能”,开启VisionKit软件采集图像如下:进行标定:1、鼠标单击画ROI按钮;2、在图像窗口中绘制一个包含六个标定点的矩形框;3、选取适当的参数提取白色圆;4、点击“识别圆心”,即获取到6个白色圆心坐标(注意抓取白圆顺序需和图档点顺序一致);5、单击“获取激光数据”,即获取到相对应的激光坐标,如下图:6、点击“标定”,即生成矩阵文件,完成标定,如下图:标定完成。
标定完成后需要验证标定精度,操作如下:开启打标软件,并加载标定验证的打标图档(图档中心画一个十字架即可),并打开普通打标方式。
在VisionKit中“开启视频”,单击“单点验证按钮”,在图像任意位置点击,可以看到鼠标点击位置激光打出十字架,在右侧小窗口检查激光打出的白色十字架是否和窗口显示的绿色十字架完全吻合。
如果有偏差可以建立区域组并选择对应的区域,并在区域组补偿值中填写需要的补偿值,重复测试直到完全吻合。
(相关详细操作可参考设置和验证补偿章节内容)模板制作点击添加按钮,进入模板制作界面,如下图。
点击模板区域。
点击更新训练图。
1、选择“矩形”;2、然后点击“添加”;3、在右方图像编辑框,鼠标左键绘制一个距形区域,大小刚好将需定位部分框住为合适。
绘制完成后,单击“创建模板”按钮,可以得到模板轮廓,制作完成;选中1,点击编辑参考点按钮,移动参考点到打标图档中Mark点位置,默认参考点为模板匹配定位点即模板区域的中心位置。
例如:Mark点位置在打标图案P的中心,则参考点也设置在中心位置即可。
点击保存按钮,保存模板为。
退出点击确定,可以看到我们新建的模板。
单击测试,可看到图像窗口显示OK,(如果设置过参考点并需使用则记得在运行时勾选“取参考点定位”)如下所示。
模板建立成功。
生产运行运行VisionKit软件,点击开始运行;打开打标软件,加载生产打标图档。
点击“通用打标方式”,在弹出界面点击开始。
可以看到VisionKit软件,采集图像,定位产品成功。
注意:打标软件“设置-当前CCD模板工具集名设置”中的名称需要和模板名称一致。
误差校正如果定位打标发现位置有细微偏差,可以进行校正。
在整体补偿处设置需要补偿的数值,再点击“应用于全部工位”。
五、软件操作注意事项1、所有需在界面绘制的功能,必须点右键结束,否则容易造成软件卡死;2、当相机初始化失败时,请先检查驱动是否安装成功,再检查采集卡和数据线是否存在问题;附录A:软件定制功能说明:对客户定制的功能和说明通过附件的形式陈述附录B:术语解释说明:对说明书内容中的专用术语、英文缩写和其它需要解释的概念进行陈述。
附录C:技术支持与服务说明:对客户在使用过程中遇到问题的处理办法和方式说明,注明联系地址、电话、邮箱、网址等。