护栏清洗机开题报告.
护栏清洗机开题报告.
[4]罗尔娟.智能型多功能清洁车研发[J].山西交通科技.2015(05):106
[5]王忠良,李景春.车辆及高速公路护栏清洗设备的现状与展望[J]业学院学报:3
[6]高根树,秦娜,陈诚.道路护栏机械清洗刷具技术研究[J].建设机械技术与管理,2013,26(12):76-78.
目前马路护栏多数是用人工清洗,劳动强度较大,清洗效率较低。偶尔也有个别地方在洒水车的侧面或前面加上一个可以低速旋转的毛刷在喷淋情况下刷洗护栏,但是毛刷不能横向移动,也不能升降运动,所以刷洗面很有限,刷洗效果也欠佳。道路上白天车流量很大,人工清洗护栏不安全且影响交通,一般在晚上车流量相对较小时清洗,而晚上清洗时经常有发生车撞环卫工人的事故[3]。所以迫切需要解决好护栏的清洗问题。
1)研究背景及意义
马路作为交通管理工作的重要组成部分,是一个城市的经济、文化、市容、市貌等方面综合体现的窗口,它标志着一个城市管理水平的高低。现在由于城市内车用,而它的作用不仅在于维持良好的交通秩序,提高公路交通的安全性,也是城市景观的重要组成部分[1]。在护栏的使用过程中,由于车辆的尾气排放、风沙雨水侵蚀及其它自然或人为原因,护栏表面会出现灰尘污染,久而久之还会出现结垢,其不仅会使护栏标志不洁而失效,更容易造成交通事故,而且也会使其失去美观,影响路容路貌[2]。护栏的清洗不仅提升城市的市容市貌,也延长了护栏的使用寿命。
3、随着工程机械智能化的发展。各种交通运输工具及设施的清洗设备发展方向必将朝着智能化发展[10]。
3)参考文献
[1]顾大强.新型高速公路护栏清洗装置设计.世界科技研究与发展,2008(05):3-4
[2]李永胜.公路用防撞护栏清洗车作业效率及配置数量分析[J].山西交通科技,2009(02):66-67.
护栏清洗机开题报告._New
(1)国外城市道路护栏清洗机研究现状
国外的高速公路相对中国起步早,相应的高速公路养护技术也较成熟,比较有代表性的有美国和德国[13-2010]
80年代初,美国福特公司首先研制成功了防撞护栏清洗机设备,它是在轮式行走地盘的前桥上悬挂作业装置,采用机械传动,以单刷射水方式作业,其车厢内装设3000L的金属水箱提供水源,工作效率约为5~ 10km/h,清洗宽度为300mm^-500mm.我国京津塘高速公路已有引进,并在使用中。
目前马路护栏多数是用人工清洗,劳动强度较大,清洗效率较低。偶尔也有个别地方在洒水车的侧面或前面加上一个可以低速旋转的毛刷在喷淋情况下刷洗护栏,但是毛刷不能横向移动,也不能升降运动,所以刷洗面很有限,刷洗效果也欠佳。道路上白天车流量很大,人工清洗护栏不安全且影响交通,一般在晚上车流量相对较小时清洗,而晚上清洗时经常有发生车撞环卫工人的事故[3]。所以迫切需要解决好护栏的清洗问题。
[3]李宇峰.一种道路护栏清洗车[J].专用汽车,2002(01):26-27.
[4]罗尔娟.智能型多功能清洁车研发[J].山西交通科技.2015(05):106
[5]王忠良,李景春.车辆及高速公路护栏清洗设备的现状与展望[J]业学院学报:3
[6]高根树,秦娜,陈诚.道路护栏机械清洗刷具技术研究[J].建设机械技术与管理,2013,26(12):76-78.
通过对国内外城市护栏清洗机的现状分析,在承认我们存在差距的同时,必须认识到我们的清洗机设备开发是一个系统工程,应朝着以下几个方向努力:
1、满足环境保护、市容建设、资源利用、安全使用的要求,使用循环用水设施、无污染清洗液等。
2、采用机械化或电脑程序控制的机械化作业,提高生产率,代替人在危险、有毒、粉尘、震动、噪声等恶劣环境中工作。
机械设计毕业设计说明书马路护栏清洗机的设计
湖北工业大学毕业设计说明书题目:马路护栏清洗机学院:机械学院专业:机电一体化学号: 1010100406姓名:熊飞指导教师:王海涛完成日期:2014年5月湖北工业大学毕业论文(设计)任务书论文(设计)题目:马路护栏清洗机学号:1010100406姓名:熊飞专业:机电一体化指导教师:王海涛系主任:李奕一、主要内容及基本要求1:了解城市街道护栏清洗机的原理及其设计:2:CAD绘图设计,要求A0图纸一张,总共达到两张A0。
3:说明书,要求8000字以上,要求内容完整,计算准确:4:外文翻译3000字以上,要求语句通顺。
二、重点研究的问题1:马路街道护栏清洗机结构的设计:2:马路街道护栏清洗机工作原理的选型四、应收集的资料及主要参考文献[1]任伯森.中国机械式清洗设备发展概况[J].中外清洗设备及配套产品重点厂商名录.1999,1 :5 -7[2]喻乐康,左东晓.机械清洗的技术发展[J]建设机械技术与管理.1999,1: 30 -32[3]张福恩、吴乃优.交流调速电梯原理、设计及安装维修[M].北京:机械工业出社.1999[4]余锡存、曹国华.单片机原理及接口技术[M].西安:西安电子科技大学,2000[5]刘竞成.交流调速系统[N].上海:上海交通大学出版社,1984[6] ELEVATER WORLD[J], U.S.A: ELEVATER WORLD. INC. 1981^1989[7]B .K.博瑟.交流调速系统[Nu].姚承三等译.北京;煤炭工业出版社.1986[9]PhilipsRS ,ElectricL ifts[M].London:Sir LsaacP itman&SonsLtd,1996[10]高健.机械优化设计基础[M].北京:科学出版社,2000.湖北工业大学毕业论文(设计)评阅表学号1010100406 姓名熊飞专业机电一体化毕业论文(设计)题目:马路护栏清洗机湖北工业大学毕业论文(设计)鉴定意见学号:1010100406 姓名:熊飞专业:机电一体化毕业论文(设计说明书)27 页图表 6 张目录第一章研究背景及发展概况‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 1一研究背景‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 1二发展概况‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 21 成型产品介绍‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 22 技术差距‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 6第二章结构设计‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 8一工作原理及主要机构‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 8二设计要求‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 12三方案讨论‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 13第三章设计计算‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 14一刷子的设计计算‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 14二电动机的选定‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 16三支撑导槽的设计‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 18四液压泵的选择‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 20五带轮传动设计计算‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 22结论‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 24设计体会‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 24致谢‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 25参考文献‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 26第一章城市道路护栏清洗车的研究背景发展概况一研究背景管理设施作为交通管理工作的重要组成部分,是一个城市的经济、文化、市容、市貌等方面综合体现的窗口,它标志着一个城市管理水平的高低。
开题报告
家居门窗清洗器设计开题报告学生:题目来源本课题来自于指导老师的课题一、目的和意义清洁机器人作为服务机器人领域中的一个新产品,尽管目前国内在这方面的研究开发方面已经取得一定的成果, 但是仍有许多关键技术问题需要解决或提高, 路径规划就是其中的一个比较重要的技术。
有的清洁机器人可以在一些玻璃门窗上自由移动,但有些门窗会限制机器人的活动。
事实上,虽然有一些公司推出了一些样品或产品,但却不能达到满意程度:清洁效果不佳,遍历时间长。
而且,大部分的清洁机器人适用于高楼大厦的面积较大的玻璃,这种玻璃面积大留给机器人的活动空间大,阻碍相对较少,但是要清洁家居门窗,这样的清洁机器人就不太合适了,因为当前的清洁机器人有如下特点:体积较庞大,设计机构较复杂,清洗效果不佳,辅助装置较多,无法翻越障碍。
因此,如何高效、安全地进行清洁家中的门窗被许多人开始重视,而我们设计的新型遥控式爬壁清洁机器人较好地解决了以上问题。
它以四驱车为基本造型参考,外形美观,结构简单,体积小,重量轻,且大胆提出干擦理念。
能达到预期的清洁效果。
我们综合运用遥控技术和机械技术,利用现在已研究较为成熟的爬壁技术原理,并在此基础上,主要对机器人的清洁机构、前进机构、换向机构、越障控制等进行创新设计和创新组合,以较为有效的实现家居玻璃门窗的清洁工作。
二、阅读的主要参考文献及资料名称【1】濮良贵,纪名刚.机械设计.第七版.北京:高等教育出版社,2001.【2】王先逵.机械制造工艺学.北京:清华出版社.1989.【3】孙恒、陈作模主编,《机械原理》,高等教育出版社,2000年08月;【4】陈奎生.液压传动与气动.武汉:武汉理工大学出版社,2001.【5】廖念钊.互换性与测量技术基础.第三版.北京:中国计量出版社,2002.【6】张福润,徐鸿本.机械制造技术基础.第二版.武汉:华中科技大学出版社,2000.【7】孟少农.机械设计手册.第四版.北京:机械工业出版社,1986.【8】汪凯.机械设计标准应用手册.北京:机械工业出版社,1996.三、国内外现状和发展趋势与研究的主攻方向在机器人领域,工业机器人已经被大量投入使用,它们从事着高速度高精度的单调的工作,而且只有训练有素的人才会操作它。
清洗机毕业设计开题报告
清洗机毕业设计开题报告一、项目背景随着现代人生活水平的提高,人们对生活品质的要求也越来越高。
清洁和卫生是每个家庭重视的问题,尤其是对于衣物的清洗。
然而,传统的手洗方式及家用洗衣机在某些场景下并不能满足需求,比如对于大型家具布艺、地毯等的清洗。
因此,设计一款高效且方便的清洗机成为了迫切的需求。
二、项目目标本毕业设计的目标是设计一款清洗机,能够满足以下要求: - 高效:能够快速而彻底地清洗各类衣物、布艺和地毯等。
- 方便:操作简单,清洗过程自动化,用户只需要将物品放入机器中,设定清洗参数即可。
- 高质量:能够保证物品的清洁度和整体品质,避免损坏和变形。
三、项目内容1.清洗机结构设计:设计清洗机的整体结构,包括外壳、清洗舱、过滤装置等。
需要考虑结构稳定性、材料选择和装配方便性等因素。
2.清洗机工作原理:研究清洗机的工作原理,包括水流循环系统、清洗剂喷洒装置、清洗机控制系统等。
保证清洗过程中的高效性和清洁度。
3.清洗机控制系统设计:设计清洗机的控制系统,包括自动洗涤程序的编写、运行状态的监测与控制等。
确保清洗过程的稳定性和安全性。
4.清洗机优化改进:通过不断对清洗机进行试验和改进,提升清洗效果和用户体验。
包括清洗剂选择、喷洒效果、洗涤时间等参数的优化调整。
四、项目计划本项目将按照以下计划进行推进:时间任务第1-2周调研现有清洗机市场及技术现状第3-4周设计清洗机的整体结构第5-6周研究清洗机的工作原理第7-8周设计清洗机的控制系统第9-10周进行清洗机的实验和优化改进第11-12周撰写毕业设计论文第13-14周进行论文的修改和完善五、项目预期成果该毕业设计预期将完成以下成果: 1. 清洗机的结构设计图纸和样机。
2. 清洗机的工作原理模型及相应理论分析。
3. 清洗机的控制系统设计方案和示例程序。
4. 清洗机的试验数据和改进方案。
5. 毕业设计论文的撰写。
六、项目意义设计一款高效且方便的清洗机,对于提高人们的生活质量和节约时间具有重要意义。
道路护栏清洗机开题报告
道路护栏清洗机开题报告一、项目背景道路护栏是保障行车安全的重要设施之一,经过长时间使用后,会积累大量的尘土、污垢和车辆排放物。
这些积累会影响道路护栏的外观和使用寿命,甚至可能降低道路驾驶安全性。
因此,定期对道路护栏进行清洗是非常必要的。
目前,道路护栏清洗主要依靠人工清洗,但这种方式效率低、耗时长,且人工清洗过程中存在安全风险。
为了提高道路护栏清洗的效率和安全性,我们计划开发一款道路护栏清洗机。
二、项目目标本项目的目标是设计并制造一款道路护栏清洗机,实现对道路护栏的自动清洗。
具体目标包括:1.研发一种有效的清洗方法,能够彻底清洁道路护栏表面的尘土、污垢和车辆排放物。
2.设计一套自动化系统,包括传感器、控制器和执行器,实现对清洗机的自动控制和操作。
3.提高清洗效率,使清洗机能够快速地清洗大面积的道路护栏。
4.保证清洗机的安全性,减少人工操作的风险。
三、项目计划本项目的实施计划如下:1.项目调研阶段:调查市场需求和现有技术,确定清洗机的设计要求和功能。
预计耗时:2周。
2.设计阶段:根据调研结果,进行清洗机的总体设计、结构设计和控制系统设计。
预计耗时:4周。
3.制造阶段:根据设计图纸制造清洗机的各个部件,进行组装和调试。
预计耗时:8周。
4.测试阶段:对清洗机的各项功能进行测试和优化,确保其满足设计要求。
预计耗时:2周。
5.实验验证阶段:将清洗机安装在实际使用环境中进行试验,验证其清洗效果和安全性。
预计耗时:4周。
6.优化改进阶段:根据实验验证结果,对清洗机进行进一步的优化和改进。
预计耗时:2周。
7.项目总结报告:总结项目的实施过程和结果,并提出改进建议。
预计耗时:1周。
四、预期成果本项目实施完成后,预期会有以下成果:1.完成一份详细的道路护栏清洗机设计报告,包括机器结构图、工作原理图和控制系统原理图等。
2.制造一台能够实现道路护栏自动清洗的样机,包括清洗机主体、传感器、控制器和执行器等部件。
3.实现道路护栏清洗的自动化操作,提高清洗效率和安全性。
清洗机开题报告
武汉东湖学院本科生毕业论文(设计)开题报告
注:①开题报告用A4纸打印装订在毕业论文(设计)任务书后,学生可根据开题报告的长度加页。
②开题报告应根据毕业论文(设计)任务书,在教师指导下,有学生本人独立撰写,在毕业论文(设计)开始后三个星期内完成。
③指导教师意见包括以下内容:学生的调研是否充分;研究内容和技术方案是否明确;是否已经具备开始论文(设计)的条件;能否达到预期目标;是否同意进入论文(设计)阶段。
(注:可编辑下载,若有不当之处,请指正,谢谢!)。
城市护栏自动清洗小车毕业设计
机械原理课程设计说明书设计题目:城市护栏自动清洗小车姓名:学号:201003050716专业:机械工程及自动化班级:10机械(1)班指导教师:小组成员:2012年7月目录第1章概论 (3)1.1 护栏状况 (4)1.2 人工清洗 (4)1.3大型清洗车 (4)1.4 新型清洗车 (5)第2章总体设计 (5)2.1 工作原理 (5)第3章清洗装置设计 (7)3.1 毛刷的选择与安装方式 (7)3.2 装置机械运动简图 (8)3.3 装置部件计算 (10)第4章水循环系统 (10)4.1 系统运动机构结构分析 (10)4.2 零件选择与数据分析 (12)第5章小车行走系统设计 (14)5.1 运动机构结构分析 (14)5.2 零件的设计 (15)第6章控制系统的设计 (16)6.1 系统总体 (16)第7章石墩清洗系统. (17)7.1 作业解析 (17)第8章心得体会 (19)方案比较 (20)参考文献 (12)摘要城市护栏由于受日照、雨淋、车辆尾气、灰尘粘附及其它因素影响,表面受到了各种各样不同程度的污染。
然而城市道路护栏难以清洗,由此设计出小型城市护栏清洗车,作业时清洗机跨立在护栏上,实现对护栏和支墩的全面清洗。
以护栏本身为导轨,直接用遥控控制操作.根据小型清洗车工作原理原理。
建立了栏杆和支墩的清洗模型,并对其清洗过程进行了运动分析,同时对清洗机的机械结构和电器控制进行了阐述。
该清洗机具有结构简单,操作方便,自动化程度高等优点。
关键词:小型城市护栏清洗,毛刷,水循环系统,石墩清洗系统第 1 章概论1.1 城市护栏概况随着我国城市交通的迅速发展,城市护栏由于受日照、雨淋、车辆尾气、灰尘粘附及其它因素影响,表面受到了各种各样不同程度的污染。
目前公路隔离护栏的清洗方式主要有2种:人工清洗和借助汽车所配的高压水洗刷清洗。
图1-1 城市护栏1.2人工清洗由于人工清洗劳动强度大、清洗效率低,且由于清洗工人身处高速行驶的机动车辆中间,极易发生安全事故,清洗人员的安全得不到保障,而且周围空气中汽车尾气浓度很高,严重危害清洗工人的健康,故其清洗方式正被初步淘汰。
开题报告-自动墙壁清洗机设计
[21] 朱云河. 建筑物外表清洗机 [P]. 中国专利:CN2377989,2000-05-17. [22] 欧彬. 大楼清洗机 [P]. 中国专利:CN2531740,2003-01-22. [23] 湛 世 儒 . 全 自 动 高 层 建 筑 外 墙 清 洗 机 [P]. 中 国 专
利:CN101099654,2008-01-09. [24] 徐 彬 . 一 种 自 动 行 走 玻 璃 幕 墙 清 洗 机 [P]. 中 国 专
专利:CN1586384,2005-03-02.
[19] 马 骥 . 高 层 建 筑 智 能 化 墙 体 清 洗 机 利:CN2228762,1996-06-12.
[P]. 中 国 专
[20] 孙 文 风 . 电 脑 控 制 之 铝 帷 墙 清 洗 机 装 置 [P]. 中 国 专 利:CN2259850,1997-08-20.
进程计划(各研究环节的时间安排、实施进度、完成程度等) 起止日期 主要工作内容 2012/12/5 接受任务书 2013/1/7 前 完成开题报告 2013/1/13 前 开题论证 2013/1/14-2013/3/30 设计 2013/3/30-2013/3/31 中期考核 2013/4/1-2013/5/5 完善与总结课题 2013/5/6 提交正稿与预审 2013/5/6-2013/5/20 答辩与修改
城市道路护栏清洗机的研制
机电一体化技术城市道路护栏清洗机的研制韦尧兵,聂 萌,陈 祯,曹 勇(兰州理工大学机电工程学院,甘肃兰州730050)Development of Urban Road Guardrail Cleaning M achineWEI Yao bing,NIE Meng,CHEN Zhen,CAO Yong(Schoo l o f M echanical and Electrica l Eng ineering ,L anzhou U niver sity of T echno lo gy ,L anzhou 730050,China)摘要:针对城市道路护栏难以清洗的现状,提出了一种龙门框架分离式护栏清洗机本体结构,作业时清洗机跨立在护栏上,实现对护栏和支墩的全面清洗.根据该清洗原理,建立了栏杆和支墩的清洗模型,并对其清洗过程进行了运动分析,同时对清洗机的机械结构和电器控制进行了阐述.该清洗机具有结构简单,操作方便,自动化程度高等优点.关键词:护栏清洗;龙门框架分离式结构;支墩;控制系统中图分类号:T H 166文献标识码:A 文章编号:10012257(2011)04003004收稿日期:20101118Abstract:Based on the difficulties of how to clean the urban road guar drails,a desig n of road guardrails cleaning machine body is pro posed,w hich adopts the gantry separ ate fr am e str ucture,the machine crosses in the guar drails w hen it w orks,to achieve g uardrails and pedestals are com pletely w ashed.Acco rding to this cleaning princi ple,the w ashing m odel of g uardrail and pedestal is established and the cleaning process is analy zed,and mechanical structur e and electrical co ntrol o f the m achine are descr ibed,the machine has charac teristics of sim ple structure,easy operation and hig h degr ee o f automation,and so o n.Key words:guar drails cleaning;separate desig n fram e structure;pedestal;contr ol system0 引言我国城市交通发展迅速,公路护栏由于受车辆的尾气、灰尘粘附及其它因素影响,表面出现了不同程度的污染,影响到市容市貌[1].目前,针对城市道路中间用的隔离护栏的清洗方式主要有2种:人工清洗和借助汽车所配高压水洗刷清洗.但人工清洗劳动强度大,清洗效率低;且由于清洗工人身处高速行驶的机动车辆中间,极易发生安全事故;周围空气中汽车尾气浓度很高,严重危害清洗工人的健康.车载式高压水洗刷清洗一次性投入过高,一般中小城市难以承受;且由于车辆行驶路线不能保证与道路护栏平行[2],无法清洗护栏处在车行逆向的部分表面;耗水量大,清洗效果不佳,对城市交通也有一定影响.护栏清洗机结合护栏的结构特点而设计,以护栏本身为导轨,结构简单、成本低、无污染,且能够实现对支墩的清洗,与我国高等级公路养护机械节能、高效、低噪声、低污染且自动化程度高的发展相适应,具有显著的社会环境效益和经济效益.1 机械系统设计针对某市常用护栏的不同结构尺寸,进行了基本数据采集分析,以影响护栏清洗的极限尺寸来建立护栏模,据此分析影响清洗机机械结构设计的基本参数和范围,以满足不同结构尺寸护栏的清洗.具体设计要求:根据道路状况和护栏自身的特点,能够实现即时切入、切出;实现在不停车的情况下对支墩的清洗;洗擦结合,喷头刷洗间歇性供水,减少用量水,同时对部分水进行回收循环利用;自动实现清洗过程,对其前进方向进行微调;工作过程中几乎对道路交通没有影响.1.1 护栏栏杆清洗原理如图1所示,清洗作业时,护栏两对侧面滚刷将护栏栏杆 夹击"在中间,刷毛相互重叠(2~3cm),使两滚刷形成一个整体,中间不留间隙.两滚城市道路护栏清洗机的研制机电一体化技术刷高速旋转,在护栏表面刮擦,同时,沿护栏竖向表面喷水,从而实现清洗.根据分析和实验可得,当两滚刷转向相反时,可使脏物或脏水沿着箭头方向甩出去,两滚刷的刷毛在重叠处移动方向相同,可加快刷子的转速[3],滚刷两边各布置一个喷水嘴,这样可将飞溅的水珠带到护栏板面上,节约用水,达到良好的清洗效果.根据采集所得数据,护栏栅格之间的最大距离是170mm ,最小距离是120m m,护栏所用钢管直径22mm.为了使滚刷与护栏表面有效发生摩擦,利用相切的原理设计滚刷直径(包括毛长),通过分析验证,滚刷直径为260mm 时,清洗效果好,不留清洗死角.图1 护栏栏杆清洗原理1.2 护栏支墩清洗原理支墩清洗机构是机械系统的核心部件之一,采用锥形洗刷呈V 字型悬伸布置,固定于机架两侧面底部,通过洗刷与支墩表面的挤压刮擦实现清洗,由于支墩分布的间断性,运行过程中需要对其进行即时检测,间歇启动电机和供水系统.其设计必须保证强度的可靠性和清洗范围覆盖的全面性.如图2所示,由于锥形洗刷相对于水平方向呈 (25 35 )角度对称布置,故以单侧为例进行说明.锥形洗刷刷毛是由尼龙直丝和波纹丝以梅花图2 支墩清洗原理状分布,清洗机沿如图1所示方向以速度V 前进过程中,尼龙丝受到支墩表面的挤压刮擦发生变形,由于平行于护栏走向的支墩表面与其前行方向一致,能够保证该侧面的彻底清洗.对垂直于行进方向V 的侧面,采用极限半径法进行分析.设L 为尼龙丝的变形,只要保证P 点和O -O 线能够得到清洗,则其它位置都能够被清洗.由于毛长沿轴向方向呈锥形分布,故R 1 L R 2,R 1,R 2分别为最短毛和最长毛.前行过程中,尼龙丝以毛孔为圆心,以毛长为半径发生变形,被包络的面积为能够清洗到的范围,CD 为刷毛包络的极限位置,则阴影部分为无法清洗的部分,占整个支墩表面积的不到1%,同时由于e >0,刷毛不会与地面发生刮擦,故能够达到清洗效果.1.3 机械系统总体结构设计如图3所示,清洗机由机械连接件通过间距调隙部件对称组成,呈龙门框架分离式结构,两部分都具有各自的驱动系统与执行系统.工作时,将A -B 两单车快速拼装由主控芯片统一控制,使之跨立于护栏之上,洗刷部件和擦洗部件由洗刷电机通过V 带传动在护栏两侧面做盘旋式前进运动,滚刷两边竖向布置喷水嘴,两支墩清洗机构呈V 字型布置,水泵间歇向栏杆和支墩表面喷洒雾状水花.图3 道路护栏自动清洗机机械结构原理主动轮本身带有动力,其上安装调节销,用来在一定范围内控制主动轮的转向,后轮万向,行进时清洗机以护栏底部横为导轨,导向轮能通过自身的弹簧对车身进行一定程度上的微调来控制其行进方向,同时配合程序的PID 算法差速控制,使得滚刷始终与护栏紧密接触.正常工作状态下辅助支撑收向两单车背离护栏两侧面,当遇到高大障碍时,通过辅助支撑将两部分分离,同时可通过间距隙部件横向调节两单车A -B 间距,实现即时切入、切出.机电一体化技术城市道路护栏清洗机的研制2 控制系统设计2.1 控制系统原理控制系统采用模块化设计,包括主控单片机、协处理器、电源模块、电机驱动模块、调速模块、检测报警模块和显示模块等.整个系统由2个12V,60A 的铅酸蓄电池提供电源,处理器采用MC9S12DG128单片机,主要控制各个组成部分的启动、停车、转速、转向和避障等,采用PID 控制.电机驱动采用2片并联的M C33886芯片,以降低其工作时的导通电阻,增强其驱动能力,从而有效地降低电机频繁的正反转时驱动芯片的发热程度[4].检测装置有红外线检测、超声波测距等,将检测到的相应数据用LED 方式显示,同时提供报警.2.2 电机调速系统系统中电机的调速方法均为PWM 调速.其中2主驱动轮电动机分开进行PWM 调速,以期能实现差速调速来控制和协调2个主电动轮在直道、弯道的行驶速度和方向;考虑到电子元件的散热和驱动能力问题,2洗刷电机也分别进行PWM 调速,但是输入的PWM 信号相同;2支墩洗刷电机也分别进行PWM 调速,输入的PWM 信号也相同;2洗刷清洗液压泵使用同一个PWM 信号调速;2支墩洗刷液压泵使用同一个PWM 信号调速.如图4所示,PWM 信号从光耦4N35的1脚输图4 主驱动轮电机调速原理入,4脚输出,当PWM 信号占空比不为0时,场效应管IRF3205触发,触发时间的长短取决于PWM 信号占空比的大小.开关S 1有3个挡位:上、中、下,当开关S 1处于上挡位时电机正转,当开关S 1处于下挡位时电机反转,当开关S 1处于中挡位时电机不接通.将A/D 模块的参考电压设为0~5V,通过电位器调节此参考电压就能控制PWM 的占空比,电机由此实现调速的目的.如图5所示,在PWM 调速系统中,在电源电压U d 不变的情况下,电枢端电压的平均值取决于占空比的大小,即改变占空比的值可以改变电枢端电压U 0的平均值,从而达到调速的目的[5].图5 电机枢绕组两端的电压波形U 0=t 1/(t 1+t 2) U d =t 1/T U d =T U d (1)式中 T 占空比,0 T 13 软件系统设计系统的软件用C 语言设计而成,采用模块化编程和结构化编程,即将程序分解成若干个小模块,各个模块保持相对的独立性,只靠少量的出入口参数联系,这样使程序的调试、修改、维护都比较方便;各个模块利用严格的转移和调用语句组成一个严密的整体.软件系统主要由主程序、子程序和中断服务程序组成.3.1 主程序设计主程序的基本要求:能够检测到运行前方的障碍物,自动减速停车;出现故障或有紧急交通状况出现时,可遥控实现清洗机的预定动作;当工作负载增大或蓄电池输出电压降低,不能保证正常工作所需时,能够实现报警;即时检测支墩是否出现,调节行驶速度,间歇启动支墩清洗装置和喷水系统等.本自动护栏清洗机有3种工作模式:手动工作模式、智能工作模式和遥控工作模式.主程序如图6所示,主要包括单片机的A/D 转换、PWM 、定时器等模块的初始化,传感器部分PWM 调制信号的使能,A/D 转换通道的使能,在主循环里对A/D 采样数据进行处理,分析得出位置速度信息并对舵机转向和直流电机速度进行调度控制.子程序模块包括I/O 口初始化子程序、定时器子程序、A/D 转换初始化子程序、PWM 初始化子程序、锁相环子程序、速度采样子程序和位置偏差计算子程序等.中断程序包括实时时钟中断处理程序、A/D 转换中断处理程序和输入捕获中断处理程序等.各个模块相对独立又通过一定的参数出入口联系.城市道路护栏清洗机的研制机电一体化技术图6 主程序工作流程3.2 PID 控制算法PID(比例、积分、微分)控制是建立在经典控制理论基础上的一种控制策略.图7为单位反馈的PID 控制原理框图,其中e(t )代表理想输入与实际输出的误差,这个误差信号被送到PID 控制器,控制器对误差信号e(t )分别进行比例、积分、微分运算,其结果的加权和构成系统的控制信号u(t).图7 PID 控制原理设K p 为比例系数;T i 为积分时间常数;T d 为微分时间常数.PID 控制器的数学模型为:u =K pe +1T it0e d t +1T d d e d t(2)u(t)经被控对象获得新的输出信号y (t ),这个新的输出信号被再次送到感应比较器以发现新的误差信号.在实际过程中,由于传感器是按一定间隔周期获取位置信息的,因此必须将连续PID 控制算法离散化,这样可得到数字位置式PID 控制算法,其数学模型为:u i =K e i +TT iij =0e i +T dT(e i -e i-1)+u 0(3)表示的控制算法提供了执行机构的位置U i ,所以被称为位置式PID 控制算法.当执行机构需要的不是控制量的绝对值,而是其增量(如驱动步进电机)时,设e 为引导线偏离车体中轴线的偏差值;K 为比例系数;T 为速度采样周期;T i 为积分环节时间数;T d 微分环节时间常数.由式(3)可推导出数字增量式PID 控制算法为[6]:u i =d 0e i +d 1e i -1+d 2e i -2(4)u i =u i -1+ u i (5)d 0=K 1+T T i +T dT (6)d 1=-K (1+2T dT)(7)d 2=KT d T(8)清洗机行驶速度采用闭环控制,由PID 控制器调节,其输入量为目标速度值与当前速度值的差值,目标速度根据当前的路况信息以及路况更迭信息确定,PID 调节器的输出即为与行进电机转速成比例的数值,经处理后,得到与所需速度相对应的PWM 脉宽信号.4 结束语针对城市道路护栏清洗的难题,设计的机械本体结构为龙门框架分离式结构的自动护栏清洗机,作业时清洗机跨立在护栏之上,以护栏本身为导轨,通过刷洗和擦干实现对护栏栏杆和支墩的全方位自动化清洗.模块化的电器控制系统和多种工作模式的程序控制保证了清洗机的在无人操控下的智能运行,从而在清洗护栏过程中保证了交通顺畅和作业人员的安全.该自动护栏清洗机设计合理,结构简单,操作方便,自动化程度高,可进行推广.机电一体化技术参考文献:[1] 彭南兴.公路护栏清洗装置的开发研制[J].工程机械,2006,37(12):7-9.[2] 黄海兵.新型城市护栏清洗机的开发研究[J].工程机械,2009,32(2):11-13.[3] 吴文杰,陈 赣,顾大强.新型高速公路护栏清洗装置设计[J].世界科技研究与发展,2008,30(10):618-620.[4] 王少锋.竞赛用智能汽车的研究与实现[D].兰州:兰州理工大学,2008.[5] 王 苏.直流电机P WM 调速研究及单片机控制实现[J].自动控制,2008,37(11):82-95.[6] 谢剑英,贾 青.微型计算机控制技术[M ].北京:国防工业出版社,2004.作者简介:韦尧兵 (1965-),男,甘肃靖远人,教授,研究方向为裂纹技术与应力断料装备;聂 萌 (1986-),男,山东泰安人,硕士研究生,研究方向为成套装备及其制造.直线电机气浮精密平台的设计与控制丁亮亮,赵东标,陆永华,范一保(南京航空航天大学机电学院,江苏南京210016)Design and Control of Air Bearing Precision Positioning Stag e Driven by Liner M ot orDING Liang liang,ZHAO Dong biao,LU Yong hua,FAN Yi bao(Co llege of M echanical and Elect rical Eng ineering ,N anjing U niv ersit y of A ero nautics and A str onautics,Nanjing 210016,China)摘要:高精度综合测量仪在工作中要求达到亚微米级的运动精度,为此建立了XZ 直线电机气浮精密运动平台,对气浮导轨设计、直线电机控制等关键技术进行了研究.采用有限元设计法设计了气浮导轨,实验结果表明,采用该方法设计的气浮导轨具有较高的承载能力和刚度.提出一种改进的PID 控制策略,从而改善直线电机运动平台的抗干扰能力,并使其获得较高的稳态位置精度.实验结果显示,在采用这种控制方法后,直线电机气浮精密平台的定位精度可达到0.5 m.关键词:永磁直线同步电机;气浮导轨;平台设计;PID 控制中图分类号:T P133;T P273文献标识码:A 文章编号:10012257(2011)04003404收稿日期:20101123基金项目:航空科学基金资助项目(2008ZE52049)Abstract:The hig hprecision m easuring instrum ent r equired achieving submicro n mo vement,so an X Z air bearing precise positioning stag e driven by liner mo to r w as established.Som e key techniques,including desig n method of aerostatic guide and control of liner motor,w ere studied.T heaerostatic guide w as designed by finite elem ent m ethod.Ex perimental results show that the aero static g uide have high load capability and stiffness.In or der to im pro ve stage s positio ning accuracy,the tracking perform ance and interfer ence rejection of liner motor must be impr oved.So an improv ed PID contro l strategy w as proposed to improve anti inter ference ability and access high position accu racy.Ex perimental results show that in using this contro l m ethod,the positioning accuracy can reach 0.5 m.Key words:liner m otor;aerostatic guide;str uc tur e desig n;PID contr ol0 引言作为检测装备的核心部件之一,精密运动平台的运动精度性能要求也越来越高,如在高精度测量仪中的运动平台都要求达到亚微米级的运动定位精度[1].由于具备直线电机的 零传动"特性与气浮导轨的 无摩擦运动"特性,与传统的旋转电机+滚珠丝杆+滚动导轨的运动平台相比,直线电机+气浮导。
道路护栏杆清洗机设计开题报告
道路护栏杆清洗机设计开题报告开题报告课题名称道路护栏清洗机设计课题类型B-实践应用型指导教师学生姓名学号专业班级本课题的研究现状、研究目的及意义研究现状:1.国外道路护栏清洗机技术现状随着我国经济的快速发展,高等级公路的建设也逐步加快。
为保证交通及车辆分道行驶的安全性,高速公路都设置了防撞护栏。
在护栏的使用过程中,由于车辆的尾气排放、风沙雨水侵蚀及其它自然或人为原因,护栏表面会出现灰尘污染,久而久之还会出现结垢,其不仅会使护栏标志不洁而失效,更容易造成交通事故,而且也会使其失去美观,影响路容路貌。
护栏的整洁关系到城市的市容市貌,也更是国家形象的体现。
因此护栏的清洗是各地环卫部门的重要工作。
2.关于道路护栏清洗机的国内外发展现状(1)国外道路护栏清洗机技术现状我国清扫车技术的发展令世界瞩目,但是,与发达国家相比,我国清车还存在不少差距。
我国的清扫车在清扫效率、清扫能力、除尘效果等清扫作业性能方面与发达国家的水平相当,而在清扫车的噪声、排放、可靠性、舒适性,自动调整等方面仍存在较大差距,特别是全液压清扫车,仅相当于发达国家20世纪80年代末到90年代初产品的水平。
就目前我国清扫车的水平和质量可知,我国在清扫车设计中,还缺少对专用部件的研究,缺少设计理论的指导,经验多于计算,模仿较多,创新较小。
可以说,目前我国对清扫车的研究能力还较差,还未真正达到对清扫车进行研究的目的和要求,同时,缺乏必要的研究条件。
目前,我国中小型全液压清扫车除与汽车底盘改装的清扫车存在同样的缺陷外,还存在舒适性差、声大、车质量大、形不够美观等缺点。
外国内的清扫车在以下几个方面有待改进:如在高可靠性上,设备的高可靠性就是指某种设备的可靠程度,即在其正常使用当中的无故障间隔时间的长短。
国产工程机械平均无故障间隔时间为150小时一300小时。
而国外工程机械都在600小时一2000小时。
我国工程机械的平均使用寿命仅为国外同类产品的1/2,甚至不到1/2。
一种道路护栏清洗机的制作方法
一种道路护栏清洗机的制作方法1. 引言道路护栏在保障交通安全和行车顺畅方面起到了关键作用。
长期以来,道路护栏的清洁都是人工清洗,存在效率低、费时费力、效果不佳等问题。
为了解决这些问题,提高护栏清洁效率和质量,我们设计了一种道路护栏清洗机。
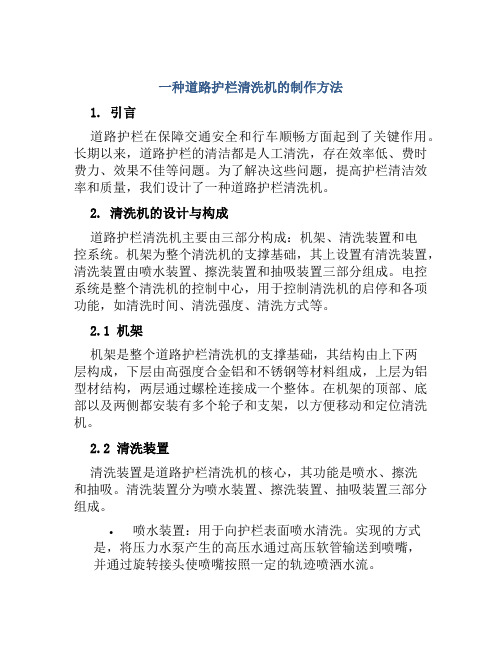
2. 清洗机的设计与构成道路护栏清洗机主要由三部分构成:机架、清洗装置和电控系统。
机架为整个清洗机的支撑基础,其上设置有清洗装置,清洗装置由喷水装置、擦洗装置和抽吸装置三部分组成。
电控系统是整个清洗机的控制中心,用于控制清洗机的启停和各项功能,如清洗时间、清洗强度、清洗方式等。
2.1 机架机架是整个道路护栏清洗机的支撑基础,其结构由上下两层构成,下层由高强度合金铝和不锈钢等材料组成,上层为铝型材结构,两层通过螺栓连接成一个整体。
在机架的顶部、底部以及两侧都安装有多个轮子和支架,以方便移动和定位清洗机。
2.2 清洗装置清洗装置是道路护栏清洗机的核心,其功能是喷水、擦洗和抽吸。
清洗装置分为喷水装置、擦洗装置、抽吸装置三部分组成。
•喷水装置:用于向护栏表面喷水清洗。
实现的方式是,将压力水泵产生的高压水通过高压软管输送到喷嘴,并通过旋转接头使喷嘴按照一定的轨迹喷洒水流。
•擦洗装置:用于擦洗护栏表面的污垢和杂物。
实现的方式是,将旋转刷头和刷毛浸入清洗液中,并通过电机带动刷头旋转,在接触护栏表面时产生擦洗效应。
•抽吸装置:用于将清洗液和护栏表面的污垢吸入清洗机。
实现的方式是,通过吸风机和高效滤网组成的吸入系统,将清洗液和污垢吸入清洗机,在过滤器的作用下清理清洗液,并将干净的清洗液送回喷水装置中进行回收重复利用。
2.3 电控系统电控系统是整个道路护栏清洗机的控制中心,用于控制清洗机的启停和各项功能,如清洗时间、清洗强度、清洗方式等。
电控系统主要由微处理器、中央处理器、开关、指示灯等组成。
通过合理的编程,可以实现不同清洗需求下的多样化操作。
3. 清洗机的工作原理道路护栏清洗机工作原理基于清洗装置的运作,其基本过程如下:1.将清洗液加入清洗机的液位线(约20L)。
高墙清洗机开题报告
高墙清洗机开题报告一、论文名称高楼外墙清洗机设计二、研究论文的背景、目的和意义随着我国经济的快速发展和人们生活水平的提高,城市建筑也迅速朝高空中发展。
高层建筑层出不穷。
众多的电子产品在高层建筑内,产生了大量静电,传存在建筑物的墙壁里,建筑物的外墙及玻璃受静电的影响吸附了大量的灰尘,天长日久,日晒,风吹,雨淋,外墙上留下了一道道污迹,不但损坏了建筑物,而且还影响了城市的美观和市容。
人们常采用的是一根绳和一块板吊人清洗的高危作业。
为弥补这一缺陷,我们设计了一种投资小,成本低,安全可靠,工作效率高的全自动高层建筑外墙清机。
外墙自动清洗机是现代高层建筑外墙清洗的专用设备,适应高层建筑的外墙自动清洗大大节省了人力,杜绝了人工工作时的危险。
并且建筑物外墙清洗业在我国已引起广泛注意和重视。
所有的高层建筑物外墙,由于长期日晒和风吹雨打,以及大气中有害的气体和油烟等污染和化学反应的侵蚀,使得建筑物外墙产生了污垢和风化,既影响了建筑物的美观和市容,又损坏了建筑物。
因此,清洗建筑物的外表,不仅美化环境,而且起到了保护建筑物的作用。
三、国内外研究的现状和发展趋势高层建筑外墙壁面清洗机是特种机器人的一种,其必须具有两种功能:即在壁面上的吸附功能和移动功能,由于建筑物表面的非导磁性,清洗壁面机器人多采用正压和负压两种吸附结构。
其中负压吸附又成为真空吸附,由风扇、真空泵、空气压缩机等使吸盘内产生负压,依靠压差将机器人吸附在墙面上。
真空吸附式壁面移动机器人又可分为单吸和多吸两种结构,单吸盘真空吸附壁面机器人可实现小型化,轻量化,且结构简单,易于控制,多吸盘脚式壁面爬行机器人的吸附稳定可靠。
(一)国外产品研究状况水射流技术是一种正在蓬勃发展、用途很广的高新技术。
国外一些工业发达国家的水射流技术很发达,形成了规模化的产业,特别是在美国、德国和日本专业化的水射流设备制造厂及配套和服务公司很多,在1960年代就不惜巨款投资进行研究和开发,并已在某些领域大力普及高压水技术,取得了满意的效果。
城市道路护栏清洗车毕业设计
目录第一章研究背景及发展概况‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 1一研究背景‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 1二发展概况‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥ 11 成型产品介绍‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥12 技术差距‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥8第二章课题分析‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥10一工作原理及主要机构‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥10二设计要求‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥12三方案讨论‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥121 底盘选用及整体布局方案‥‥‥‥‥‥‥‥‥‥‥ 122 传动方案‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥173 运动机构方案‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥224 纠偏系统方案‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥22第三章设计计算‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥25一刷箱及刷子的设计计算‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥25二液压系统的设计计算‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥29 1液压马达的选用‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥302 液压缸的选用‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥303 液压泵的选择‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥324链传动设计计算‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥33三供水系统设计‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥35四油箱设计‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥36五拟定液压系统执行方案‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥39结论‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥41设计体会‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥41致谢‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥42参考文献‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥‥43第一章城市道路护栏清洗车的研究背景发展概况一研究背景管理设施作为交通管理工作的重要组成部分,是一个城市的经济、文化、市容、市貌等方面综合体现的窗口,它标志着一个城市管理水平的高低。
车间护栏翻新报告
车间护栏翻新报告1. 引言本报告旨在记录车间护栏翻新工作的整体过程和结果。
车间护栏是保障员工安全的重要设施,但长时间的使用和气候因素导致护栏出现了一些老化和损坏问题。
为了保持车间安全和美观,我们决定进行护栏的翻新工作。
2. 翻新前的问题分析在进行护栏翻新工作之前,我们对车间护栏进行了全面的检查和分析。
以下是我们发现的主要问题:1.生锈问题:护栏的金属部分出现了明显的生锈现象,严重影响了外观和保护功能。
2.钢板破损:一些护栏的钢板出现了破损和变形,可能存在安全隐患。
3.涂层脱落:护栏的涂层在部分区域脱落,需要重新涂装以提供保护。
3. 翻新工作的步骤为了解决上述问题并使车间护栏焕然一新,我们制定了以下翻新工作的步骤:1.清洗护栏:首先,使用高压水枪对护栏进行全面清洗,以去除表面的尘土和污垢。
2.除锈处理:对生锈的金属部分,使用钢丝刷和除锈剂进行除锈处理。
确保将所有生锈部分都处理到位,并达到光滑的护栏表面。
3.修复破损部分:针对破损和变形的钢板,我们会进行修复或更换工作。
通过焊接或更换钢板,确保护栏在翻新后能够保持完整和坚固。
4.重新涂装:在护栏彻底干燥后,我们会进行重新涂装工作。
使用抗腐蚀和耐候性良好的涂料,保护护栏免受气候和环境的侵蚀。
5.定期保养:将定期保养作为一个重要措施,对护栏进行维护和检查。
定期检查可能存在的问题,及时处理,确保护栏的长期使用效果。
4. 翻新效果经过上述步骤的翻新工作,车间护栏取得了显著的改善效果。
以下是我们在翻新后观察到的效果:1.外观提升:护栏经过清洗和重新涂装后,外观焕然一新,看起来更加清爽和整洁。
2.护栏强度增强:通过修复和更换破损的钢板,护栏的整体强度得到增强,提供更好的安全保护。
3.防腐能力提升:新涂层的施工保证了护栏的防腐功能,减少了进一步生锈的风险。
4.延长使用寿命:翻新工作的完成将大大延长护栏的使用寿命,减少了后续的维修和更换成本。
5. 总结通过对车间护栏的翻新工作,我们成功解决了护栏的老化和损坏问题,提升了车间的安全性和美观度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
[7]宁维庆,靳长征.护栏清洗机滚刷规避机构的设计计算[J].山西省交通科学研究所.1999(6):16
[8]穆彬彬.基于知识的护栏清洗装置混合变型设计系统研究[D].南京理工大学,2015.
1)研究背景及意义
马路作为交通管理工作的重要组成部分,是一个城市的经济、文化、市容、市貌等方面综合体现的窗口,它标志着一个城市管理水平的高低。现在由于城市内车辆的巨增,在如今繁忙的公路交通中,公路护栏无疑发挥着重要的作用,而它的作用不仅在于维持良好的交通秩序,提高公路交通的安全性,也是城市景观的重要组成部分[1]。在护栏的使用过程中,由于车辆的尾气排放、风沙雨水侵蚀及其它自然或人为原因,护栏表面会出现灰尘污染,久而久之还会出现结垢,其不仅会使护栏标志不洁而失效,更容易造成交通事故,而且也会使其失去美观,影响路容路貌[2]。护栏的清洗不仅提升城市的市容市貌,也延长了护栏的使用寿命。
德国具有代表性的是穆迪卡(muitcar)多功能养护车。该车为全液压驱动,当用于护栏清洗时,在车前部装设悬挂式清洗装置,以双射水完成作业,车厢内的玻璃钢水槽可容纳水量1800L。该车最大的特点是采用液压液力传动,工作装置可以方便地进入和退出作业,工作臂的变幅动作方便而容易,作业效果好,其作业宽度约350mm,最佳作业速度1.3^-1.5km/h,我国山西太旧和河北京石高速公路也有部分引进。
2)国内外发展现状分析
(1)国外城市道路护栏清洗机研究现状
国外的高速公路相对中国起步早,相应的高速公路养护技术也较成熟,比较有代表性的有美国和德国[13-2010]
80年代初,美国福特公司首先研制成功了防撞护栏清洗机设备,它是在轮式行走地盘的前桥上悬挂作业装置,采用机械传动,以单刷射水方式作业,其车厢内装设3000L的金属水箱提供水源,工作效率约为5~ 10km/h,清洗宽度为300mm^-500mm.我国京津塘高速公路已有引进,并在使用中。
湖南工业大学科技学院
本科毕业设计开题报告
(2018届)
教学部:
机电信息工程教学部
专业:
机械设计制造及其自动化
学生姓名:
陈鸿斌
班级:
机设1402
学号:1412110212
指导教师姓名:
张勇
职称:讲师
2018年1月5日
题目:马路护栏清洗机设计
1.结合课题任务情况,查阅文献资料,撰写1500~2000字左右的文献综述。
为适应养护工作需要,国外工业发达国家将大量资本和开发经理投向养护机械的研制生产(如美国每年花费150亿美元维护本国400万km公路网;法国国营及A级道路中国道里程29700km,用于国道养护的机械、车辆就达到6万多台),从而使养护机械得到迅速发展,其产品类型和技术达到比较完善的高度[5]。
(2)国内城市道路护栏清洗机研究现状
目前马路护栏多数是用人工清洗,劳动强度较大,清洗效率较低。偶尔也有个别地方在洒水车的侧面或前面加上一个可以低速旋转的毛刷在喷淋情况下刷洗护栏,但是毛刷不能横向移动,也不能升降运动,所以刷洗面很有限,刷洗效果也欠佳。道路上白天车流量很大,人工清洗护栏不安全且影响交通,一般在晚上车流量相对较小时清洗,而晚上清洗时经常有发生车撞环卫工人的事故[3]。所以迫切需要解决好护栏的清洗问题。
我国拥有655个大中型城市,全国各大中小城市,需要清洗的城市护栏更广泛。各市、各区、各县对其需求都很显著,新型护栏清洗设备的技术优势和成本优势的运用都将降低传统的人力清洗过程所造成的人力资本的耗费。本项目可以运用于城市道路护栏,高速公路护栏、公园、社区等护栏的清洗。一般情况,2-3个月护栏就需要一次清洗,如采用人工方式,按300m/人/天,人工费0.1元/m算,若某城市的护栏总长为1000km,则每年除去耗材费用,仅人工投入就需要45万元,我国655个城市的投入就为2.9475亿元,数额巨大,并且容易引发交通事故,造成额外赔偿。如采用车载式清洗方式,买台售价都在15万元以上,按照每个城市采购10辆车计算,总的投资成本9.825亿元,并且耗水量大,冬季容易造成路面结冰,引发交通事故[4]。因此本项目具有广阔的市场前景。
[3]李宇峰.一种道路护栏清洗车[J].专用汽车,2002(01):26-27.
[4]罗尔娟.智能型多功能清洁车研发[J].山西交通科技.2015(05):106
[5]王忠良,李景春.车辆及高速公路护栏清洗设备的现状与展望[J]业学院学报:3
[6]高根树,秦娜,陈诚.道路护栏机械清洗刷具技术研究[J].建设机械技术与管理,2013,26(12):76-78.
3、随着工程机械智能化的发展。各种交通运输工具及设施的清洗设备发展方向必将朝着智能化发展[10]清洗装置设计.世界科技研究与发展,2008(05):3-4
[2]李永胜.公路用防撞护栏清洗车作业效率及配置数量分析[J].山西交通科技,2009(02):66-67.
通过对国内外城市护栏清洗机的现状分析,在承认我们存在差距的同时,必须认识到我们的清洗机设备开发是一个系统工程,应朝着以下几个方向努力:
1、满足环境保护、市容建设、资源利用、安全使用的要求,使用循环用水设施、无污染清洗液等。
2、采用机械化或电脑程序控制的机械化作业,提高生产率,代替人在危险、有毒、粉尘、震动、噪声等恶劣环境中工作。