二维平台综合实验
二维动画实践实验过程记录

二维动画实践实验过程记录一、引言二维动画是一种通过在平面上绘制一系列图像,快速连续播放以产生动态效果的艺术形式。
在这个实践实验中,我们将探索二维动画的制作过程,并记录下实验的每一个步骤和结果。
二、实验准备在开始实验之前,我们需要准备以下材料和工具:1. 电脑或平板电脑2. 绘图软件,如Photoshop或Illustrator3. 绘图工具,如绘图板或鼠标4. 视频编辑软件,如Adobe Premiere或Final Cut Pro三、动画概念和故事构思在开始制作动画之前,我们需要先确定动画的概念和故事构思。
这个步骤非常重要,因为它将决定动画的主题和情节。
我们可以从现实生活中的故事、童话故事或自己编写的故事中获取灵感。
四、角色设计和绘制在确定了动画的概念和故事构思后,我们需要设计并绘制动画中的角色。
角色设计要考虑到角色的外貌特征、服装和表情等。
绘制角色可以使用绘图软件,通过绘制轮廓和填充颜色来创建角色的形象。
五、场景设计和绘制除了角色设计,我们还需要设计和绘制动画的场景。
场景设计要考虑到背景、道具和布景等因素。
绘制场景可以使用绘图软件,可以根据故事情节选择不同的场景,使用不同的颜色和纹理来绘制。
六、动画帧设计和绘制在完成角色和场景的设计和绘制后,我们需要开始设计和绘制动画的帧。
动画帧是指每一幅静止的画面,这些帧将连续播放以产生动态效果。
我们可以根据动画的需要,设计和绘制不同的帧,每一帧都要注意细节和流畅度。
七、动画帧的动作设计和绘制在完成动画帧的设计和绘制后,我们需要为每一帧添加动作。
动作可以是角色的移动、表情的变化或其他物体的运动等。
通过绘制不同的动作帧,我们可以实现动画的连贯和流畅。
八、音效和配乐设计除了图像的设计和绘制,音效和配乐也是动画制作中不可忽视的部分。
通过添加音效和配乐,可以增强动画的氛围和表达力。
我们可以使用音频编辑软件,选择合适的音效和配乐,并将其与动画进行合成。
九、动画编辑和导出在完成所有的设计和绘制后,我们需要使用视频编辑软件将动画的帧和音效进行编辑和导出。
平台综合实验报告

一、实验背景随着信息技术的飞速发展,各种平台层出不穷,为人们的生活和工作带来了极大的便利。
为了更好地了解和掌握这些平台的特点和应用,我们开展了本次平台综合实验。
本次实验旨在通过对不同类型平台的操作、功能和使用效果进行对比分析,为我国平台发展提供有益的参考。
二、实验目的1. 了解不同类型平台的特点和应用场景。
2. 掌握平台的基本操作和功能。
3. 分析平台的优势和不足,为平台优化提供依据。
4. 提高自身对信息技术的理解和应用能力。
三、实验内容本次实验选取了以下几种平台进行综合实验:社交平台、电商平台、办公平台、学习平台。
1. 社交平台:以微信、微博为例。
(1)微信:一款集即时通讯、社交、支付等功能于一体的平台。
用户可以通过微信与朋友、家人保持联系,同时还可以分享生活、购物、娱乐等内容。
(2)微博:一款以短消息为主,具有实时性、互动性等特点的社交平台。
用户可以通过微博关注感兴趣的话题、明星和品牌,及时获取最新资讯。
2. 电商平台:以淘宝、京东为例。
(1)淘宝:一家以C2C模式为主的电商平台,为消费者提供丰富的商品选择和便捷的购物体验。
(2)京东:一家以B2C模式为主的电商平台,注重商品品质和物流速度,为消费者提供优质的服务。
3. 办公平台:以企业微信、钉钉为例。
(1)企业微信:一款为企业提供即时通讯、办公协同、客户关系管理等功能的企业级平台。
(2)钉钉:一款以办公协同为主,集通讯、会议、任务管理等功能于一体的企业级平台。
4. 学习平台:以网易云课堂、腾讯课堂为例。
(1)网易云课堂:一家提供在线教育服务的平台,用户可以在这里学习各种课程,提高自身技能。
(2)腾讯课堂:一家以职业教育为主,提供各类在线课程的平台,满足用户的学习需求。
四、实验步骤1. 注册并登录所选平台。
2. 学习平台的基本操作和功能。
3. 对比分析不同平台的特点和优势。
4. 模拟实际应用场景,体验平台的使用效果。
5. 撰写实验报告。
五、实验结果与分析1. 社交平台(1)微信:方便快捷的即时通讯功能,强大的社交圈子,丰富的社交功能,使得微信在日常生活中得到了广泛应用。
试验一精确绘制二维平面图形综述1试验目的在熟悉绘图软件基本

实验一精确绘制二维平面图形综述:1、实验目的在熟悉绘图软件基本命令、基本操作的基础上,通过本次实验,熟悉绘图环境的初步设置,掌握综合运用绘图命令、编辑命令、辅助绘图方式、输入数据的不同方式按照尺寸精确绘制二维平面图形的技巧,提高运用计算机快速而准确地绘制较复杂平面图形的技能。
2、实验要求①熟悉绘图环境初步设置的内容与方法;②熟悉辅助绘图方式的设置与应用;③熟练应用不同的数据输入方式和绘图、编辑命令,快速、准确地绘制图形;④熟练应用尺寸标注命令标注各类型的尺寸。
3、实验内容等(结合实例)①对绘图环境进行初步设置,包括:确定绘图单位、绘图界限、设置必要图层、调整线型比例、修改系统默认配置等内容,养成绘制图形之前先做好绘图准备,设置好绘图初始环境的习惯。
②对十字光标步进距离、栅格大小、目标捕捉、对象捕捉、极轴、对象追踪等辅助绘图工具进行必要的设置,便于绘图时使用,提高作图的速度和精确度。
③以实例绘制的步骤说明数据输入、绘图、编辑命令及辅助绘图工具的应用。
④以实例标注说明各类尺寸不同标注命令的应用。
1绘图环境的初步设置同手工绘图前必须做准备工作一样,刚进入绘图、编辑状态时,初始的绘图环境(指绘图时的某些参数)不一定合适,所以绘图前第一件事应当是进行绘图环境初始化,养成绘制图形之前先做好绘图准备,设置好绘图初始环境的习惯。
最基本的初始化包括确定绘图单位、绘图界限、设置必要图层、调整线型比例等内容,高级的初始化工作包括修改系统的一些默认配置,建立一个符合个人习惯、更方便、快捷的绘图环境。
1.1绘图环境的基本初始化已建立的图形文件,绘图单位、绘图界限、线型比例如果不合适,需要重新调整;用“缺省”方式建立的新图,对绘图单位、绘图区域、图层、文字样式等也要先进行设置,这些工作就是对绘图环境的基本初始化。
直接用“格式”下拉菜单中的单位、图形界限、图层、线型、文字样式等命令就可进行相应的设置或调整。
例如,点击“图形界限”命令,命令行会出现提示,如图1所示。
二维平台的力学耦合分析及解耦设计

二 维 平 台 的 力 学 耦 合 分 析 及 解 耦 设 计
苏 文
( 北 电子 技 术 研 究 所 , 宁 东 辽 锦 州 l10 ) 2 0 0
摘
要 : 二维 平 台 为研 究 对 象 , 绍 了影 响 平 台精 度 的 主要 干 扰 源 , 据 平 台 的 结 构 特 点 , 析 了 两 环 间 的转 动 惯 量 耦 合 、 以 介 根 分
为了解除光 学 系统 视 场 角 的 限制 , 光学 系统 将
擦约束 影响平 台的稳 定 性 . 种干 扰 源通 过 机 械连 各
安装 在二维平 台上 , 以扩大 其动态视 场范 围 . 减少 系 统个数 , 提高 系统 的工 作 效率 和 利用 率 是 现 代机 电
装备发 展的一 个重 要 特 点 . 平 台的运 动 会 影 响 系 但
要 问题 .
由于 系统 整体 质 心与 转 动轴线 不 完全 重合 , 平 台在运 动时产 生干扰 力矩使方 位环 与俯仰 环偏离 原 始位置 , 加大力 学耦合 程度 . 12 摩 擦力矩 . 只要平 台有运动 , 就存 在摩擦力 矩 , 主要 包括轴 承的摩擦 力矩 和有 刷 电机 的 电刷 摩 擦 力矩 等 . 摩擦 力矩 的存 在将 增大 动力学耦 合程度 .
c u l g i n te i e n y o e lo o a e . Th a u e fr mi i i n o p i g o y a c n h o p i o x s wh n o l n o p r t t s n s t e me s r o nm z g c u l f d n mis a d t e i n m e h fu c u l e i n o t u t r l e i n a e b o g t t o o n o p e d sg n s r c u a sg r r u h . d d d Ke o d :wo d me s n pa f r ;o p ig; n o pe e i n y w r s t i n i lt m c u l o o n u c u ld d s g
《计算机辅助工业设计(二维)》课程标准
1.课程性质计算机辅助工业设计是产品造型工业设计专业的必修课程。
通过学习,使学生具备产品设计助理工程师的设计表现技能,学生综合运用二维软件完整将设计创意表达。
开设一学期,教学时数为48学时,3学分。
2.课程定位该课程是工业设计专业的核心课程,在产品设计表现流程中,是承上启下的课程,该课程是基于手绘设计表现的学习后,将手绘草图转换成二维效果图,并衔接后续计算机辅助工业设计三维、数字化模型及手工模型课程。
根据工业设计专业人才培养方案中产品设计助理工程师的岗位及职业能力分析表中典型工作任务来设置的,培养学生熟练掌握二维、三维产品设计表达以及产品的色彩、材质、加工工艺的知识,反复训练,综合提升学生的专业认知及职业素养的养成。
前导课程:图像处理技术、产品手绘设计表现技法后续课程:计算机辅助工业设计、数字化产品设计、产品模型制作3.课程设计思路课程内容设计重在培养学生利用二维软件的设计制作能力,围绕产品造型设计表现流程、特点及能力要求,通过具体软件操作技能技能入手。
依据产品设计原则和项目课程要求,组织学生完成实际产品二维效果图的设计表达,培养学生综合的设计表现能力及掌握在产品设计过程中对象的色彩、材质、加工工艺等知识。
为充分体现任务引领、项目导向课程思想,本课程根据产品造型设计专业人才培养方案中职业岗位及职业能力分析表中的产品设计表现技能为主要的教学内容,展开以产品二维效果图塑造、产品色彩、材质、加工工艺表现选择具有代表性的产品案例进行教学。
本课程对产品造型设计专业开设48课时。
1.知识目标经过本课程的学习,学生能够系统地学习与掌握二维绘图软件进行产品设计表现的流程与方法;能够系统地学习与掌握二维绘图软件塑造三维效果的的基本原理;能够系统学习与掌握产品材质在二维设计中的表现2.能力目标经过本课程的学习学生能够熟练地使用二维设计软件完成产品基本材质表达(金属、塑料、玻璃、陶瓷等),并掌握二维软件的基本操作技能;能够熟练地使用二维设计软件完成简单产品的二维设计表现,并掌握设计表现流程及基本方法;能够熟练地使用二维设计软件综合设计表现产品二维效果图,并掌握产品在色彩、材质、加工工艺的表现方法。
deform模拟实验报告_正挤_反挤_图文(精)
学生学号实验课成绩武汉理工大学学生实验报告书实验课程名称材料成型CAM开课学院材料学院指导老师姓名学生姓名学生专业班级2011 — 2012 学年第一学期实验教学管理基本规范实验是培养学生动手能力、分析解决问题能力的重要环节;实验报告是反映实验教学水平与质量的重要依据。
为加强实验过程管理,改革实验成绩考核方法,改善实验教学效果,提高学生质量,特制定实验教学管理基本规范。
1、本规范适用于理工科类专业实验课程,文、经、管、计算机类实验课程可根据具体情况参照执行或暂不执行。
2、每门实验课程一般会包括许多实验项目,除非常简单的验证演示性实验项目可以不写实验报告外,其他实验项目均应按本格式完成实验报告。
3、实验报告应由实验预习、实验过程、结果分析三大部分组成。
每部分均在实验成绩中占一定比例。
各部分成绩的观测点、考核目标、所占比例可参考附表执行。
各专业也可以根据具体情况,调整考核内容和评分标准。
4、学生必须在完成实验预习内容的前提下进行实验。
教师要在实验过程中抽查学生预习情况,在学生离开实验室前,检查学生实验操作和记录情况,并在实验报告第二部分教师签字栏签名,以确保实验记录的真实性。
5、教师应及时评阅学生的实验报告并给出各实验项目成绩,完整保存实验报告。
在完成所有实验项目后,教师应按学生姓名将批改好的各实验项目实验报告装订成册,构成该实验课程总报告,按班级交课程承担单位(实验中心或实验室)保管存档。
6、实验课程成绩按其类型采取百分制或优、良、中、及格和不及格五级评定。
附表:实验考核参考内容及标准观测点考核目标成绩组成实验预习1.预习报告2.提问3.对于设计型实验,着重考查设计方案的科学性、可行性和创新性对实验目的和基本原理的认识程度,对实验方案的设计能力20%实验过程1.是否按时参加实验着重考查学生的实验态度、基本操30%2.对实验过程的熟悉程度3.对基本操作的规范程度4.对突发事件的应急处理能力5.实验原始记录的完整程度6.同学之间的团结协作精神作技能;严谨的治学态度、团结协作精神结果分析1.所分析结果是否用原始记录数据2.计算结果是否正确3.实验结果分析是否合理4.对于综合实验,各项内容之间是否有分析、比较与判断等考查学生对实验数据处理和现象分析的能力;对专业知识的综合应用能力;事实求实的精神50%实验课程名称材料成型CAM实验项目名称DEFORM-2D软件的操作与实例演练实验成绩实验者专业班级组别同组者实验日期年月日第一部分:实验预习报告(包括实验目的、意义,实验基本原理与方法,主要仪器设备及耗材,实验方案与技术路线等)一、实验目的1)了解认识DEFORM软件的窗口界面。
二维精密气浮运动平台控制系统稳定性研究

二维精密气浮运动平台控制系统稳定性研究朱小刚;马平【摘要】二维精密气浮运动平台采用直接驱动进给和气浮导轨支承技术,不仅需要有较高的定位精密、运动速度和定位加速度,而且要求直接驱动伺服系统具有足够的稳定裕度.根据自动控制原理,对系统参数进行了分析,并完成了参数修正,论文利用Matlab语言和Simulink软件对X轴控制器电流环、速度环、位置环进行建模仿真研究,验证了二维气浮运动平台控制系统是稳定的,且有足够的稳定裕度.建立了实验单元,通过控制器参数整定软件PMAC Tuning PRO2调节PID参数,完成参数优化.实验表明平台控制系统是稳定的,优化PID参数能使系统更快到达稳定状态.%The aerostatic guideway technology and linear driving technology are applied to two-dimensional precision areostatic bearing stage,which not only needs higher positioning precision, speed and acceleration, but also demands enough stability margin of linear driving servo system. According to the auto-control principle,parameters of the control system are analyzed and modified.Paper established the current loop, velocity loop and position loop simulation models by Matlab and Simulink software on the X axis controller, it's proved that the control system is stable and has enough stability margin. Experimental unit is established, through adjusting PID parameters with PMAC Tuning PRO2 software,we completed the optimization of parameters. Experiments show that the control system of the two-dimensional precision areostatic bearing stage is stable, optimization of PID parameters can make the system more quickly reach the stable state.【期刊名称】《机械设计与制造》【年(卷),期】2017(000)008【总页数】4页(P136-139)【关键词】二维运动平台;直线驱动;PMAC;稳定性【作者】朱小刚;马平【作者单位】广东工业大学机电工程学院,广东广州 510006;广东工业大学机电工程学院,广东广州 510006【正文语种】中文【中图分类】TH16;TP273;TM359.4高速大行程超精密机床的进给系统大多采用气浮支承和直线电机进行驱动,其摩擦阻尼极小,而直线电机的电气时间常数也很小,这使得其控制难度就非常大。
二维动画实验报告 (2)
江西科技师范学院实验报告课程二维动画院系教育学院班级2010教育技术学学号姓名报告规格一、实验目的二、实验原理三、实验仪器四、实验方法及步骤五、实验记录及数据处理六、误差分析及问题讨论目录1. flash基础操作2. flash运动补间3. flash引导层与遮罩层4. flash综合贺卡制作5. 时间轴命令应用6. 数字运算语句7. 影片剪辑事件8. 交互性手绘场景制作9. 课件作品综合设计10. 脚本作品综合每次实验课必须带上此本子,以便教师检查预习情况和记录实验原始数据。
实验时必须遵守实验规则。
用正确的理论指导实践袁必须人人亲自动手实验,但反对盲目乱动,更不能无故损坏仪器设备。
这是一份重要的不可多得的自我学习资料袁它将记录着你在大学生涯中的学习和学习成果。
请你保留下来,若干年后再翻阅仍将感到十分新鲜,记忆犹新。
它将推动你在人生奋斗的道路上永往直前实验一一、实验课程名称二维动画二、实验项目名称Flash基础操作三、实验目的和要求初步了解flash制作界面,掌握flash基本操作及用法四、实验内容和原理熟悉flash操作界面五、主要仪器设备电脑 Flash8.0六、操作方法与实验步骤1、打开flash软件,出现下面的界面点击界面上的flash文档,然后进入下面的界面2、下面分别熟悉一下界面,下图是时间轴界面,是Flash MX中进行动画制作和内容编排的主要场所下面是场景,场景是指在当前动画编辑窗口中,编辑动画内容的整个区域右图是动作面板,在操作界面的右侧,显示的是各个浮动面板的组合,如图所示,面板用来设置不能在属性面板中设置的功能。
3、熟悉了这些界面之后,接下来是要熟悉文件的操作:新建文件的几种方法:●执行【文件(File)】【新建(New)】命令。
●单击常用工具栏中的【新建】按钮。
●按【Ctrl+N】组合键。
保存文件的操作步骤:1、执行【文件】【保存(Save)】命令,打开【另存为(Save As)】对话框。
基于Python_的多维度、层次化的综合实验平台
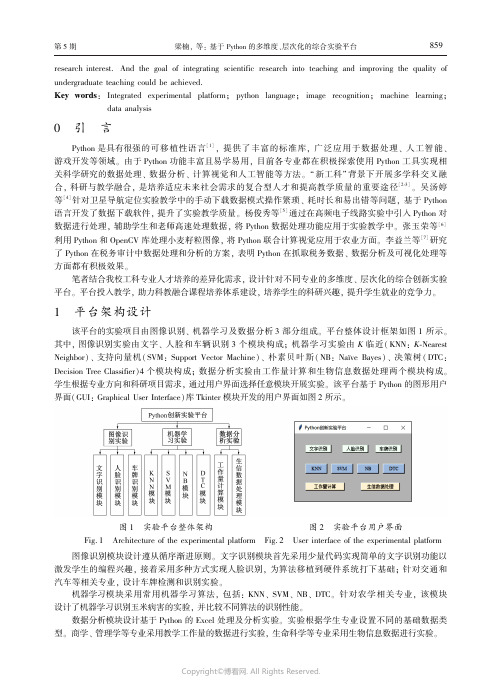
research interest.And the goal of integrating scientific research into teaching and improving the quality of undergraduate teaching could be achieved.Key words :Integrated experimental platform;python language;image recognition;machine learning;data analysis 0 引 言Python 是具有很强的可移植性语言[1],提供了丰富的标准库,广泛应用于数据处理㊁人工智能㊁游戏开发等领域㊂由于Python 功能丰富且易学易用,目前各专业都在积极探索使用Python 工具实现相关科学研究的数据处理㊁数据分析㊁计算视觉和人工智能等方法㊂ 新工科”背景下开展多学科交叉融合,科研与教学融合,是培养适应未来社会需求的复合型人才和提高教学质量的重要途径[2⁃3]㊂吴汤婷等[4]针对卫星导航定位实验教学中的手动下载数据模式操作繁琐㊁耗时长和易出错等问题,基于Python 语言开发了数据下载软件,提升了实验教学质量㊂杨俊秀等[5]通过在高频电子线路实验中引入Python 对数据进行处理,辅助学生和老师高速处理数据,将Python 数据处理功能应用于实验教学中㊂张玉荣等[6]利用Python 和OpenCV 库处理小麦籽粒图像,将Python 联合计算视觉应用于农业方面㊂李益兰等[7]研究了Python 在税务审计中数据处理和分析的方案,表明Python 在抓取税务数据㊁数据分析及可视化处理等方面都有积极效果㊂笔者结合我校工科专业人才培养的差异化需求,设计针对不同专业的多维度㊁层次化的综合创新实验平台㊂平台投入教学,助力科教融合课程培养体系建设,培养学生的科研兴趣,提升学生就业的竞争力㊂1 平台架构设计该平台的实验项目由图像识别㊁机器学习及数据分析3部分组成㊂平台整体设计框架如图1所示㊂其中,图像识别实验由文字㊁人脸和车辆识别3个模块构成;机器学习实验由K 临近(KNN:K ⁃Nearest Neighbor)㊁支持向量机(SVM:Support Vector Machine)㊁朴素贝叶斯(NB:Naïve Bayes)㊁决策树(DTC:Decision Tree Classifier)4个模块构成;数据分析实验由工作量计算和生物信息数据处理两个模块构成㊂学生根据专业方向和科研项目需求,通过用户界面选择任意模块开展实验㊂该平台基于Python 的图形用户界面(GUI:Graphical User Interface)库Tkinter 模块开发的用户界面如图2所示㊂ 图1 实验平台整体架构 图2 实验平台用户界面 Fig.1 Architecture of the experimental platform Fig.2 User interface of the experimental platform 图像识别模块设计遵从循序渐进原则㊂文字识别模块首先采用少量代码实现简单的文字识别功能以激发学生的编程兴趣,接着采用多种方式实现人脸识别,为算法移植到硬件系统打下基础;针对交通和汽车等相关专业,设计车牌检测和识别实验㊂机器学习模块采用常用机器学习算法,包括:KNN㊁SVM㊁NB㊁DTC㊂针对农学相关专业,该模块设计了机器学习识别玉米病害的实验,并比较不同算法的识别性能㊂数据分析模块设计基于Python 的Excel 处理及分析实验㊂实验根据学生专业设置不同的基础数据类型㊂商学㊁管理学等专业采用教学工作量的数据进行实验,生命科学等专业采用生物信息数据进行实验㊂958第5期梁楠,等:基于Python 的多维度㊁层次化的综合实验平台068吉林大学学报(信息科学版)第41卷2 平台模块设计2.1 图像识别实验模块2.1.1 文字识别模块光学文字识别(OCR:Optical Character Recognition)结合光学和计算机技术检测像素的亮暗,将字符转换成图像文件,再利用识别工具将字符的图像转换成文字[8]㊂Tesseract是目前公认的具备精确性和灵活性的开源OCR系统[9],本实验模块利用pytesseract(Python中的Tesseract接口),采用5行代码实现图片中的文字识别,代码如下:from PIL import Image #PIL是Python图像处理标准库import pytesseract #pytesseract是Python Tesseract接口image=Image.open( Zen of Python.png’) #读取图片word=pytesseract.image_to_string(image) #识别图片中文字print(word) #显示出文字2.1.2 人脸识别模块人脸识别模块基于开源计算机视觉库OpenCV实现,OpenCV支持先进的图像处理技术且应用范围很广,可显著提高处理效率,支持跨平台处理,降低编程成本[10⁃11]㊂人脸识别和检测相辅相成,因为在人脸识别前需要判断当前图像内是否有人脸出现,这个过程是通过人脸检测实现的㊂因此该模块先向学生介绍人脸检测,再进行人脸识别实验㊂基于OpenCV提供的级联分类器Cascade Classifier,利用特征文件进行人脸检测㊂同时为增加实验趣味性,提供戴眼镜特效的例子㊂实验平台提供了多项OpenCV级联分类器文件,学生可根据自己的需求和兴趣,进行眼睛检测㊁笑容检测㊁车牌检测和猫脸检测等实验功能㊂在人脸检测后,实验平台提供不同算法进行人脸识别实验,分别为:Eigen Faces㊁Fisher Faces和局部二进制模式直方图(LBPH:Local Binary Pattern Histograms)㊂学生可将自己感兴趣的人脸图像作为输入训练算法,并自己调整参数测试识别效果㊂2.1.3 车牌识别模块车牌识别结合车牌检测和文字识别两个步骤进行㊂首先基于OpenCV进行车牌区域检测,通过高斯模糊㊁图像灰度化㊁边缘检测㊁形态学处理和中值滤波等操作,将车牌提取后,再结合文字识别功能对车牌进行识别,也可将实验结果与OpenCV中训练好的分类器进行车牌识别的结果进行比较㊂通过实验使学生更好地理解图像处理中各操作实现的效果,明确图像识别过程的基本流程㊂并结合前面学习过的文字识别实验,可以更好地巩固已学知识㊂2.2 机器学习实验模块机器学习实验从常用算法的原理部分开始,基于Python的开源机器学习库sklearn进行代码实现㊂sklearn集合多种机器学习算法,可快速建立各类模型㊂为使学生能从更直观的角度认识到机器学习算法在实际生产生活中的应用前景,该模块实验以机器学习算法在玉米病害识别中的应用为例,展示各算法的实现过程及分析应用的效果差异㊂KNN通过记忆训练过的数据集完成学习判别,根据k个临近样本信息判断测试样本信息[12]㊂调用方法为from sklearn.neighbors import KNeighborsClassifier㊂SVM通过寻找超平面区分不同类别的样本[13],具有优秀的泛化能力㊂sklearn支持不同的支持向量机类,如表1所示㊂NB是基于概率论的算法,对所有已知类别,假设属性相互独立[14]㊂对待分类项,通过计算先验概率和条件概率进行决策㊂sklearn中提供了不同的朴素贝叶斯类,如表2所示㊂DTC相比于其他算法,可解释性更优[15]㊂基于训练集的特征,DTC模型通过学习一系列问题判断样本的分类标签,从树根开始,在信息增益最大的节点上分类数据,各子节点在迭代过程重复该分裂过程,直到只剩下叶子为止㊂Python中调用方法为from sklearn.tree import DecisionTreeClassifier㊂2.3 数据分析实验模块数据分析实验从Python 提高Excel 数据处理效率为切入点,按照数据处理的流程设计数据读取㊁清洗㊁分析及展示等实验过程㊂涉及的Python 功能模块包括:xlrd㊁xlsxwriter㊁pandas㊁numpy㊁matplotlib㊁seaborn 等㊂为使实验模块功能与学生日常学习工作和科研相结合,本模块实验以工作量计算和生物信息数据处理和分析为例,为学生展示日常工作及科研中用到的常见功能㊂在工作量计算模块中,通过数据读取和分析计算后,以指定格式的表格作为输出,并对输出结果进行统计和分析㊂在生物信息数据处理的实验中,通过癌症基因组图谱数据库下载实际的公开核糖核酸(RNA:Ribonucleic Acid)及临床数据等,利用Python 进行分析后,生成科研常用的火山图㊁热图和箱线图等㊂表1 Sklearn 中的支持向量机类表2 Sklearn 中的朴素贝叶斯类3 平台测试结果3.1 图像识别实验模块3.1.1 文字识别实验以截取的Python 之禅的图片为例进行文字识别,通过该实验激发学生对Python 工具的兴趣,了解Python 作为编程工具的便捷性,如图3所示㊂图3 文字识别输入及输出结果Fig.3 Input and output of character recognition experiment 3.1.2 人脸识别实验在实验之初,以戴眼镜特效的例子激发学生兴趣㊂读入图片后,基于级联分类器利用特征文件进行图4 人脸检测后实现戴眼镜特效的图片Fig.4 Wearing glasses after face detection 人脸检测,调用方式为:cv2.CascadeClassifier ( haarcascade _frontalface _default.xml”)㊂读取眼镜图片,并根据人脸区域和尺寸调整眼镜覆盖区域和尺寸,最终生成如图4所示的效果㊂实验平台提供Eigen Faces㊁Fisher Faces㊁LBPH 3种方式进行人脸识别㊂笔者以LBPH 为例展示识别效果㊂利用recognizer =cv2.face.LBPHFaceRecognizer_168第5期梁楠,等:基于Python 的多维度㊁层次化的综合实验平台create 创建特征脸识别器,读取训练图片后,利用recognizer.train()训练识别器,读取测试图片,利用label,confidence =recognizer.predict()识别图片中人脸㊂label 为返回的标签值,confidence 为返回的可信度,表示未知人脸和模型中已知人脸之间的距离,0表示完全匹配,低于5000可认为是可靠的匹配结果㊂图5a 即为模型输入的训练图片,图5b 为测试图片及返回的模型识别可信度和标签值㊂图5 人脸识别实验输入及输出结果Fig.5 Input and output of facial recognition experiment 3.1.3 车牌识别实验在本模块中,通过实验结果直观地展示在图像识别过程中常用的处理方法对图像处理效果,包括高斯模糊㊁灰度化㊁Sobel 算子边缘检测㊁二值化㊁腐蚀㊁膨胀和中值滤波等,从而将车牌区域截取出来,如图6a 所示㊂检测到车牌后,再对其进行灰度化㊁二值化和形态学处理等,从而生成便于识别的图像形式,最终采用pytesseract.image_to_string 将截取的车牌图片进行识别后,显示出车牌识别结果,如图6b 所示㊂图6 车牌识别实验输入及输出结果Fig.6 Input and output of license plate recognition experiment 268吉林大学学报(信息科学版)第41卷3.2 机器学习实验模块机器学习模块以KNN 算法为例展示实验结果㊂玉米病害数据集取自2018AIchallenger 植物病害程度图片数据集中玉米病害的部分,其中分类0表示健康玉米,分类1表示玉米灰斑病,分类2表示玉米锈病,分类3表示玉米叶斑病,分类4表示玉米花叶病毒病,分类图片如图7a 所示㊂通过sklearn.model_selection 中的train_test_split 将数据集中30%选为测试集,训练集图片数量为2147张,测试集图片数量为921张㊂将图像读取并转换为像素直方图存储在数组中,构建分类模型,使用训练集训练模型,评估模型得分,使用数据测试并显示分类结果㊂图7b 为从分类2数据集中抽取图片测试,模型预测结果也为分类2㊂图7 玉米病害识别实验输入及输出结果Fig.7 Input and output of corn disease recognition experiment 3.3 数据分析实验模块3.3.1 工作量计算实验该实验目的是使学生熟悉Python 中xlsxwriter㊁pandas㊁numpy 等模块在Excel 数据处理中的使用㊂程序处理的原始文件为Excel 表格,共分为两个Sheet㊂其中Sheet1为收集到的工作人员的相关工作信息,包括课程名称㊁学时和授课人数等信息㊂Sheet2中为工作人员的基本信息,处理重复值㊁缺失值及空格值后,依照实验要求对原始数据进行折算㊂运行程序后,生成工作量明细的Excel 文件和工作量合计表的Excel 文件㊂对明细中的每项数据,都是依据实验规定的参数和公式计算,并且有相应的数据折算前的来源标注在表中,依据明细计算的情况生成工作量合计表,如图8所示㊂368第5期梁楠,等:基于Python 的多维度㊁层次化的综合实验平台图8 工作量计算实验模块输入及输出结果Fig.8 Input and output of workload data processing and analysis experiment 3.3.2 生物信息数据分析实验 图9 差异基因火山图 Fig.9 Volcano map of differential gene 该实验模块提供下载于癌症基因组图谱数据库的公开数据供学生实验使用㊂将实际科研中常用的数据用于学生的实验中,使学生能更好地将所学知识应用于后续科研工作中㊂本部分以差异基因的火山图为例展示实验结果㊂将部分RNA⁃Seq 文件利用Python 程序xlsxwriter 及pandas 模块合并后,对重复值㊁空白值进行处理后,提取差异基因,计算差异倍数(log FC)和差异的P 值,在P 值<0.05的前提下log FC>1标记为上调,log FC<-1的标记为下调,利用seaborn 模块生成火山图,如图9所示㊂4 结 语笔者提出的基于Python 的综合实验平台已在开放性创新实验中应用,面向多个专业的学生㊂学生通过学习本实验课程,对Python 在图像识别㊁机器学习以及数据分析的编程实现有深入的了解和掌握㊂同时,根据专业方向和科研项目需求,自主选择实验模块,真正实现了差异化教学,因材施教,从而实现将科研融入教学,提高本科生教学质量的目标㊂参考文献:[1]刘雪琳,章钰琪,董爱国.基于Python 的物理实验数据处理系统设计与实现[J].实验技术与管理,2021,38(3):74⁃78.LIU X L,ZHANG Y Q,DONG A G.Design and Realization of Python⁃Based Physical Experimental Data Processing System[J].Experimental Technology and Management,2021,38(3):74⁃78.[2]吴林志. 四维度”新工科人才培养模式构建与实施路径研究[J].黑龙江高教研究,2022,40(8):151⁃155.WU L Z.The Four⁃Dimension Training Model Construction and Its Implementation Path of New Engineering Talents [J].Heilongjiang Researches on Higher Education,2022,40(8):151⁃155.[3]籍风磊,李志军,迟学芬,等.多网协同的实验室智能安防实验系统设计[J].实验室研究与探索,2022,41(8):62⁃65.JI F L,LI Z J,CHI X F,et al.Design of Laboratory Intelligent Security Experiments System Based on Multi NetworkCooperation [J].Research and Exploration in Laboratory,2022,41(8):62⁃65.[4]吴汤婷,梁乔,卢立果.基于Python 设计的GNSS 数据下载软件在卫星导航定位实验教学中的应用[J].实验室研究与探索,2022,41(8):199⁃202.WU T T,LIANG Q,LU L G.Application of GNSS Data Download Software Designed by Python in the Experimental Teaching of Satellite Navigation and Positioning [J].Research and Exploration in Laboratory,2022,41(8):199⁃202.468吉林大学学报(信息科学版)第41卷[5]杨俊秀,赵文来,姚青,等.高频电子线路实验数据的Python 处理分析[J].实验技术与管理,2021,38(10):227⁃231,240.YANG J X,ZHAO W L,YAO Q,et al.Experimental Data Processing and Analysis of High Frequency Electronic Circuit by Python [J].Experimental Technology and Management,2021,38(10):227⁃231,240.[6]张玉荣,王强强,吴琼,等.基于Python⁃OpenCV 图像处理技术的小麦不完善粒识别研究[J].河南工业大学学报(自然科学版),2021,42(6):105⁃112.ZHANG Y R,WANG Q Q,WU Q,et al.Research on Imperfect Wheat Grain Recognition Based on Python⁃OpenCV ImageProcessing Technology [J].Journal of Henan University of Technology (Natural Science Edition),2021,42(6):105⁃112.[7]李益兰,姜友文.Python 技术在风险导向税务审计中的应用研究[J].财会通讯,2022(3):138⁃141.LI Y L,JIANG Y W.Research on the Application of Python Technology in Risk Oriented Tax Audit [J].Communication of Finance and Accounting,2022(3):138⁃141.[8]王凌燕.中文字符识别系统的研究与实现[J].吉林大学学报(信息科学版),2020,38(2):199⁃205.WANG L Y.Research and Implement of Chinese OCR System [J].Journal of Jilin University (Information Science Edition),2020,38(2):199⁃205.[9]曾悦,马明栋.基于Tesseract⁃OCR 文字识别的研究[J].计算机技术与发展,2021,31(11):76⁃80.ZENG Y,MA M D.Research on Text Recognition Based on Tesseract⁃OCR [J].Computer Technology and Development,2021,31(11):76⁃80.[10]SONG J,JEONG H,JEONG J.Performance Optimization of Object Tracking Algorithms in OpenCV on GPUs [J].Applied Sciences,2022,12(15):7801.[11]周原锐,张逸群,曹远航,等.基于OpenCV 视觉库的手写数字识别系统[J].吉林大学学报(信息科学版),2021,39(5):602⁃608.ZHOU Y R,ZHANG Y Q,CAO Y H,et al.Handwritten Digital Recognition System Based on Visual Library OpenCV [J].Journal of Jilin University (Information Science Edition),2021,39(5):602⁃608.[12]SONG X,XIE T,FISCHER S.Accelerating KNN Search in High Dimensional Datasets on FPGA by Reducing ExternalMemory Access [J].Future Generation Computer Systems,2022,137:189⁃200.[13]吴祖慷,朱晓冬,刘元宁,等.基于GA⁃SVM 模型的虹膜质量评估方法[J].吉林大学学报(理学版),2022,60(1):89⁃98.WU Z K,ZHU X D,LIU Y N,et al.Iris Quality Evaluation Method Based on GA⁃SVM Model [J].Journal of Jilin University (Science Edition),2022,60(1):89⁃98.[14]KIM T,LEE J.Exponential Loss Minimization for Learning Weighted Naive Bayes Classifiers [J].IEEE Access,2022(10):22724⁃22736.[15]STREEB D,METZ Y,SCHLEGEL U,et al.Task⁃Based Visual Interactive Modeling:Decision Trees and Rule⁃Based Classifiers [J].IEEE Transactions on Visualization and Computer Graphics,2022,28(9):3307⁃3323.(责任编辑:张洁)568第5期梁楠,等:基于Python 的多维度㊁层次化的综合实验平台第41卷 第5期吉林大学学报(信息科学版)Vol.41 No.52023年9月Journal of Jilin University (Information Science Edition)Sept.2023文章编号:1671⁃5896(2023)05⁃0866⁃10融合SikuBERT 模型与MHA 的古汉语命名实体识别收稿日期:2022⁃09⁃28基金项目:国家自然科学基金资助项目(61402099;61702093)作者简介:陈雪松(1972 ),女,黑龙江大庆人,东北石油大学教授,主要从事信息安全㊁信息隐藏㊁数字水印㊁信号与信息处理等研究,(Tel)86⁃139****0816(E⁃mail)cxsnepu@㊂陈雪松a ,詹子依a ,王浩畅b(东北石油大学a.电气信息工程学院;b.计算机与信息技术学院,黑龙江大庆163318)摘要:针对传统的命名实体识别方法无法充分学习古汉语复杂的句子结构信息以及在长序列特征提取过程中容易带来信息损失的问题,提出一种融合SikuBERT(Siku Bidirectional Encoder Representation from Transformers)模型与MHA(Multi⁃Head Attention)的古汉语命名实体识别方法㊂首先,利用SikuBERT 模型对古汉语语料进行预训练,将训练得到的信息向量输入BiLSTM(Bidirectional Long Short⁃Term Memory)网络中提取特征,再将BiLSTM 层的输出特征通过MHA 分配不同的权重减少长序列的信息损失,最后通过CRF(Conditional Random Field)解码得到预测的序列标签㊂实验表明,与常用的BiLSTM⁃CRF㊁BERT⁃BiLSTM⁃CRF 等模型相比,该方法的F 1值有显著提升,证明了该方法能有效提升古汉语命名实体识别的效果㊂关键词:古汉语;命名实体识别;SikuBERT 模型;多头注意力机制中图分类号:TP391.1文献标志码:AAncient Chinese Named Entity Recognition Based on SikuBERT Model and MHACHEN Xuesong a ,ZHAN Ziyi a ,WANG Haochang b(a.School of Electrical and Information Engineering;b.School ofComputer and Information Technology,Northeast Petroleum University,Daqing 163318,China)Abstract :Aiming at the problem that the traditional named entity recognition method can not fully learn the complex sentence structure information of ancient Chinese and it is easy to cause information loss in the process of long sequence feature extraction,an ancient Chinese fusion of SikuBERT (Siku Bidirectional Encoder Representation from Transformers)model and MHA (Multi⁃Head Attention)is proposed.First,the SikuBERT model is used to pre⁃train the ancient Chinese corpus,the information vector obtained from the training into the BiLSTM (Bidirectional Long Short⁃Term Memory)network is input to extract features,and then the output features of the BiLSTM layer are assigned different weights through MHA to reduce the information loss problem of long sequences.And finally the predicted sequence labels are obtained through CRF (Conditional Random Field)decoding.Experiments show that compared with commonly used BiLSTM⁃CRF,BERT⁃BiLSTM⁃CRF and other models,the F 1value of this method has been significantly improved,which verifies that this method can effectively improve the effect of ancient Chinese named entity recognition.Key words :ancient Chinese;named entity recognition;siku bidirectional encoder representation from transformers(SikuBERT)model;multi⁃head attention mechanism 0 引 言汉语历经沧桑,传承中华文明㊂我国是世界上唯一一个文化传承没有中断的国家,想要学习和发扬中国优秀的传统文化,就需要从古汉语入手㊂如何实现使计算机对古文文本进行自动化的知识点标注,。
二维平面运动系统实验平台开发

工控机 与运动控制卡相结合的控制结构 ,换句 话说就是使用运动控制卡控制交流伺服 电机 。 具体细节如下,运动控制卡 内的运动控制模块 使用并行传输指令和相应数据法去提 高接 下来 的伺服系统控制性能和数据处理速度 。然后指 示P C I 总线与 C P U之 间进行通 信,接 收来 自
俩 漂统
德概
骥
魔馕僚 蟹
促 进 高校科 研发 展 ,还 可 以作 为 本 科生 毕业 实习的 实验 平 台,提
高学生 真正 的动 手 能 力,促 进 学 生 实习。如今 ,随着科技的发展 ,
如 今 的 二 维 平 面 运 动 系统 实验 平
台逐 步 实现 全数 字 控制 ,本 文就 目前二 维平 面运 动 系统 实验 平 台
之间的相互作用 。
新能力 和实际动手能力 。本文就二维平面运动
控 制软 件 中需要 添加 相应 的模 块 ,针 对 系统实验 平台开发与培养学生相结合讨论实验 二维平 台运动 系统的应 用方面,我们添加的模 二 维平 面运 动系 统实验 平 台 的开发 无论 块 主要有 人机交 互模 块、设备安保模块 以及运 是 在 科 学研 究 方 面 还 是 在 帮 助 本 科 生 实 习方 面 和 实 习 的 结合 。 动控制模块等 ,接下来对这 几个模块进行逐一 均 具 有 较 重 要 的作 用 。对 于 科 学 研 究 方 面 ,二 1二维 平面运动 系统 介绍及工作原理 介 绍: 维平面运动 系统实验平台的开发不仅能促进 高
的开发展开讨论 。
图1 :二 维 平 台运 动 系统 结 构 图
损 失。此外,机械台体还是为成像设备提供运
二维微动工作台的定位误差补偿实验

二维微动工作 台的定位误差补偿实验
林 杰俊 ,李 东升 ,沈小燕
( 中 国计 量 学 院计 量测 试 工程 学 院 ,浙 江杭 州 3 1 0 0 1 8 )
摘要 :随着科学技术 的发展 ,超精密定位技术在各领 域得 到了广泛应用 ,它的研究对 ME MS技术 的发 展具有重要 的意 义 。对具有纳米定位 精度的二维微动工作 台的定位误 差进行研究 。首先 ,对分 辨率为 0 . 1 5 n m的双频激光 干涉仪进行 了测
量误差分析 ,其标定 二维微动工作 台时 的测量精度 为 1 4 . 4 n m;利用该 激光干涉 仪标定 时温漂 的近线性 关系去 除 了定 位误
差 中的综合误差 ,采用反相补偿法对定位误差 中的系统误差进行 了补偿 。测得 该工 作台补偿 前 的定 位误 差在 2 5 0— 3 0 0 n m 之 间,在空气 弹簧 隔振平 台上进行 了误差补偿实 验 ,测得 补偿 后两轴的定位误差分 别为 2 0 n m和 2 5 n m左右 。实验证 明了 该种方法用 于补偿 纳米定位系统 的可行性 。
n o l o y .T g h e r e s e a r c h o n c o mp e n s a t i o n o f p o s i t i o n i n g e ro s r f o r t wo — d i me n s i o n mi c r o d i s p l a c e me n t s t a g e w i t h n a n o — p o s i t i o n i n g a c c u r a c y w a s a i me d a t .F i r s t l y ,t h e me a s u r e me n t e r r o r o f t wo — f r e q u e n c y l a s e r i n t e r f e o me r t e r w i t h r e s o l u t i o n a t 0 . 1 5 n m w a s a n a l y z e d,a n d t h e me a s u i r n g a c c u r a c y wa s a t 1 4 . 4 n m w h e n i t wa s c li a b r a t i n g t h e t w o — d i me n s i o n mi c r o d i s p l a c e me n t s t a g e .Th e s y n t h e t i c e ro r i n p o s i t i o ・ n i n g e r r o r s b y t h e a p p r o x i ma t e l y l i n e a r r e l a t i o n s h i p o f t e mp e r a t u r e d i r t f w h e n c a l i b r a t i n g b y u s i n g i t wa s r e mo v e d ,a n d t h e s y s t e ma t i c e r —
系统建模与仿真实验指导书ⅠARENA二维仿真建模实验
系统建模与仿真实验指导书ⅠARENA二维仿真建模实验一、实验目的:1简单流水线建模实验掌握ARENA二维仿真软件的基本操作,掌握ARRIVE、DEPART、SEVER、INSPECT、SIMULATION等模块的应用与连接,学会采用该软件建立一条简单的生产流水线,并进行逻辑模块的参数设置和物理模块的界面设计,建成的仿真系统能运行并返回需要的统计数据。
2生产制造过程仿真建模实验借助工业工程综合实验——装配线设计实验的成果——装配线的结构与布局以及各主要工位的操作数据,通过ARENA软件进行仿真建模,比较系统运行的结果,对综合实验的设计方案进行验证实验,调整参数,寻求优化方案,进行优化设计实验。
二、实验步骤主要解决的四个问题:1)模型的建立,确定该系统需要的模块类型和数量:输入(Arrive),输出(Depart),加工操作(Sever),检验操作(Inspect)以及他们的先后顺序和连接关系2)参数设置:包括模块内参数设置和系统参数设置3)统计分析功能的建立:成品及废品平均流程时间、成品率、废品率以及其方差设置和实现,并能对此进行分析和评价,重新调整参数以实现系统优化;4)界面优化,利用系统工具或者画图工具,对仿真运行界面进行优化,体现更清晰的运动状态和物流路径,模拟加工过程的实现附:上机操作指导软件工具介绍一、Arena 软件工具的特点Arena是一个Microsoft Windows下的工具,所以它的基本界面你应该早已熟悉,但是由于Arena仿真软件是属于专业软件,并不常见,国内对该软件的操作方面的资料甚少,而且还都是外文版,所以有必要对Arena的操作界面以及相关的仿真建模操作和模块进行介绍。
(一)、操作界面图 3-1 Arena的界面1 File 菜单在这个菜单里,你可以新建Arena模型文件,打开现有模型,关闭窗口,存储模型或创建一个只许观看的模型,你也可以引进CAD图形,将AUTOCAD作为Arena 的支持工具,而在一些情况下,活动元素将允许你使用现有的详尽的机器设备的图形。
二维运动平台

(1)、丝杠的拉伸或压缩变形量
查《机电一体化系统设计课程设计指导书》表3-31得,滚珠直径 ,丝杠底径 ,丝杠横截面积S= =352.8 ,已知 =1121。将各个数据代入下式得
= 0.0287mm。
(2)、滚珠与螺纹滚道间接触变形
根据公式 ,求得单圈滚珠数Z=20;该型号丝杠为单螺母滚珠的圈数×列数为3×1,代轴向预紧力 N,代入下式得
其中,这算到电动机转轴上的最大工作负载转矩 由式 计算。本课题中对滚珠丝杠进行计算的时候,已知沿着丝杠轴线方向的最大进给负载 =1000N,则有: =
再由式 = 计算垂直方向承受最大工作负载( )情况下,移动部件运动时这算到电动机转轴上的摩擦转矩:
= =
最后由 ,求得最大工作负载状态下电动机转轴所承受的负载转矩为:
=1.154
经过上述计算后,得到加在步进电动机转轴上的最大等效负载转矩应为
3、步进电动机最大静转矩的选定 考虑到步进电动机的驱动电源受电网电压影响较大,当输入电压降低时,其输出转矩会下降,可能造成丢步,甚至堵转。因此,根据 来选择步进电动机的最大静转矩时,需要考虑安全系数。本课题中取安全系数K=4,则步进电动机的最大静转矩应满足:
则加在步进电动机转轴上的总转动惯量为:
2、计算加在步进电动机转轴上的等效负载转矩
分快速空载起动和承受最大工作负载两种情况进行计算
1)快速空载起动时电动机转轴所承受的负载转矩由公式 可知, 包括三部分:一部分是快速空载起动时折算到电动机转轴上的最大加速转矩 ;一部分是移动部件运动时折算到电动机转轴上的摩擦转矩 ;还有一部分是滚珠丝杠与今后折算到电动机转轴上的附加摩擦转矩 。因为滚珠丝杠副传动效率很高,根据公式 可知, 相对于 和 很小,可以忽略不计。则有:
二维动画实验报告

江西科技师范学院实验报告课程二维动画院系教育学院班级2010教育技术学学号 _________________姓名 _________________四、 实验方法及步骤五、 实验记录及数据处理 六、 误差分析及问题讨论录1. _____________ flash 基础操作 _____________________________2. _____________ flash 运动补间 ___________________________3. _____________ flash 弓丨导层与遮罩层 ___________________4. _____________ flash综合贺卡制作 _______________________5._____________ 时间轴命令应用 ___________________________ 6. ______________ 数字运算语句 ___________________________7. _____________ 影片剪辑事件 _____________________________ 8. ______________ 交互性手绘场景制作 ______________________ 9. ______________ 课件作品综合设计 ________________________ 10._____________ 脚本作品综合 ____________________________每次实验课必须带上此本子,以便教师检查预习情况和记录实验原始数据。
实验时必须遵守实验规则。
用正确的理论指导实践袁必须人人亲自动手实验,但反对盲目乱 动,更不能无故损坏仪器设备。
这是一份重要的不可多得的自我学习资料袁它将记录着你在大学生涯中的学习和学习成果。
请你保留下来,若干年后再翻阅仍将感到十分新鲜,记忆犹新。
它将推动你在人生奋斗的道路上 永往直前实验一一、 实验课程名称二维动画二、 实验项目名称Flash 基础操作三、 实验目的和要求初步了解flash 制作界面,掌握flash 基本操作及用法四、 实验内容和原理熟悉flash 操作界面五、 主要仪器设备电脑 Flash8.0一、 实验目的 二、 实验原理 三、 实验仪器六、操作方法与实验步骤1、打开flash 软件,出现下面的界面点击界面上的flash 文档,然后进入下面的界面2、下面分别熟悉一下界面,下图是时间轴界面,是Flash MX 中进行动画制作和内容编排的主要场所下面是场景,场景是指在当前动画编辑窗口中,编辑动画内容的整个区域右图是动作面板,在操作界面的右侧,显示的是各个浮动面板的组合,如图所示,面板用来设置不能在属性面板中设置的功能。
二维实验总结报告范文(3篇)

第1篇一、实验背景二维材料,作为一种新型材料,近年来在物理学、化学、材料科学等领域引起了广泛关注。
二维材料具有独特的物理和化学性质,如高导电性、高载流子迁移率、低能耗等,使其在电子器件、能源存储、催化等领域具有广泛的应用前景。
本实验旨在通过制备二维材料,研究其物理和化学性质,为二维材料的应用提供理论依据。
二、实验目的1. 学习和掌握二维材料的制备方法;2. 探究二维材料的物理和化学性质;3. 分析二维材料在不同应用领域的潜在价值。
三、实验原理二维材料是指具有单层原子或分子层结构的材料。
本实验主要采用液相剥离法制备二维材料,该方法具有操作简单、成本低廉、易于规模化生产等优点。
实验中,将石墨烯、二硫化钼等二维材料前驱体分散于溶剂中,通过搅拌、超声等手段,使二维材料前驱体在溶剂中形成均匀分散的悬浮液。
然后,通过旋涂、滴涂等方法,将悬浮液涂覆在基底材料上,形成二维材料薄膜。
四、实验材料与仪器1. 实验材料:石墨烯、二硫化钼、溶剂、基底材料等;2. 实验仪器:旋涂机、滴涂机、紫外-可见分光光度计、透射电子显微镜(TEM)、扫描电子显微镜(SEM)、原子力显微镜(AFM)等。
五、实验步骤1. 制备二维材料悬浮液:将石墨烯或二硫化钼等二维材料前驱体分散于溶剂中,搅拌、超声处理,形成均匀分散的悬浮液;2. 制备二维材料薄膜:将悬浮液涂覆在基底材料上,通过旋涂或滴涂方法形成二维材料薄膜;3. 性能测试:采用紫外-可见分光光度计、TEM、SEM、AFM等仪器对二维材料薄膜进行性能测试。
六、实验结果与分析1. 二维材料悬浮液制备:通过搅拌、超声等手段,成功制备了均匀分散的二维材料悬浮液,悬浮液稳定性良好;2. 二维材料薄膜制备:通过旋涂或滴涂方法,成功制备了二维材料薄膜,薄膜厚度均匀,表面光滑;3. 性能测试:采用紫外-可见分光光度计、TEM、SEM、AFM等仪器对二维材料薄膜进行性能测试,结果表明:(1)二维材料薄膜具有优异的导电性,载流子迁移率较高;(2)二维材料薄膜具有较低的能量带隙,有利于光吸收;(3)二维材料薄膜具有较好的机械性能,如强度、韧性等。
二维动画实验报告

竭诚为您提供优质文档/双击可除二维动画实验报告篇一:二维动画实验报告(2)江西科技师范学院实验报告课程二维动画院系教育学院班级20XX教育技术学学号姓名报告规格一、实验目的四、实验方法及步骤二、实验原理五、实验记录及数据处理三、实验仪器六、误差分析及问题讨论目录1.flash基础操作2.3.flash引导层与遮罩层4.flash综合贺卡制作5.时间轴命令应用6.数字运算语句7.影片剪辑事件8.交互性手绘场景制作9.课件作品综合设计10.脚本作品综合每次实验课必须带上此本子,以便教师检查预习情况和记录实验原始数据。
实验时必须遵守实验规则。
用正确的理论指导实践袁必须人人亲自动手实验,但反对盲目乱动,更不能无故损坏仪器设备。
这是一份重要的不可多得的自我学习资料袁它将记录着你在大学生涯中的学习和学习成果。
请你保留下来,若干年后再翻阅仍将感到十分新鲜,记忆犹新。
它将推动你在人生奋斗的道路上永往直前实验一一、实验课程名称二维动画二、实验项目名称Flash基础操作三、实验目的和要求初步了解flash制作界面,掌握flash基本操作及用法四、实验内容和原理熟悉flash操作界面五、主要仪器设备电脑Flash8.0六、操作方法与实验步骤1、打开flash软件,出现下面的界面点击界面上的flash文档,然后进入下面的界面2、下面分别熟悉一下界面,下图是时间轴界面,是Flashmx中进行动画制作和内容编排的主要场所下面是场景,场景是指在当前动画编辑窗口中,编辑动画内容的整个区域右图是动作面板,在操作界面的右侧,显示的是各个浮动面板的组合,如图所示,面板用来设置不能在属性面板中设置的功能。
3、熟悉了这些界面之后,接下来是要熟悉文件的操作:新建文件的几种方法:执行【文(:二维动画实验报告)件(File)】【新建(new)】命令。
单击常用工具栏中的【新建】按钮。
按【ctrl+n】组合键。
保存文件的操作步骤:1、执行【文件】【保存(save)】命令,打开【另存为(saveAs)】对话框。
二维软件实训报告

学生实训报告实训课程名称:二维软件院别:机电学院专业:工业设计班级:10工本姓名:李芳芳学号:2010094543021 指导教师:廖丽榕教务处制二〇一二年六月七日课程名称:二维软件课程代码:实训周数:1周学分:2分实训单位:机电学院实训地点:708机房实训时间:2012/05/28~2012/6/01实训报告一开始听说AI的时候就是上课的时候了,多媒体二维软件应用课程是我心怡已久的了。
因为自己上大学以来一直都是学习手绘的时候,我只能用画笔来表达我的想法,也只能把自己的画拍成照片放在PPT上讨论而已。
反正,我觉得这样还是不够的,我觉得学习工业设计的学生应该要懂得运用软件来表达自己的想法。
这样才能与时俱进。
众所周知,AI是一款功能强大的平面软件,深受广大设计人员的喜爱。
它要学的内容很多,我们在这个课程是对一些基本技巧的掌握。
因为自己相当喜爱设计,学会这个软件既是本人的兴趣使然,也是我的工作需要。
兴趣是最好的老师,它会是我们勤于学习的动力。
满怀着期待,以兴趣为师,跟着老师走,相信这门课我定能学好。
经过丽榕老师讲授二维软件实践后,感觉对工业设计软件这门学科有了深一层的认识。
二维软件是一门重视实际操作的科学。
对于用二维软件表达产品,无非是产品定义、设计过程、后期处理几个步骤,看似简单,可是实际操作却复杂困难,它不比其它行业产品可预见可触及,所以学好软件工程能为以后从事设计行业打好基础。
在软件实践这门课中,讲到了有效利用现有资源进行产品设计的方法。
提到软件运用也可以像练习书法一样,采用临贴的方式,借鉴他人的优秀产品设计。
临摹优秀产品是学习三维软件的一个重要方法。
正如一首诗中说的:“熟读唐诗三百首,不会写来也会吟”。
学习二维软件也是一个道理。
为了真正地掌握软件开发的技巧,“临贴”是个不错的起步方法。
以前总是觉得,既然设计产品,就应该完全靠自己,那样做出来的东西才有成就感,才算是自己的东西,可是这门课程教会我原来适当地借鉴别人的东西,在原有的基础上加予创新,还可以提高效率,节省时间。
课程设计二维滑台
课程设计二维滑台一、教学目标本课程的学习目标包括知识目标、技能目标和情感态度价值观目标。
知识目标要求学生掌握二维滑台的基本原理和结构,了解其在工程应用中的重要性。
技能目标要求学生能够运用二维滑台的原理解决实际问题,提高其工程实践能力。
情感态度价值观目标要求学生培养对科学研究的兴趣,增强创新意识和团队合作精神。
通过分析课程性质、学生特点和教学要求,我们将目标分解为具体的学习成果。
学生将能够理解二维滑台的工作原理,分析其优缺点,并能够设计简单的二维滑台系统。
同时,学生还将培养解决问题的能力,提高团队合作和沟通技巧。
二、教学内容根据课程目标,我们选择和了相关的教学内容。
教学大纲明确了教学内容的安排和进度。
我们将从二维滑台的定义和基本原理开始,介绍其结构和功能。
接着,我们将学习二维滑台在工程应用中的具体案例,通过实际问题的解决来加深学生对二维滑台的理解。
此外,我们还将介绍二维滑台的设计方法和计算技巧,使学生能够独立设计简单的二维滑台系统。
三、教学方法为了激发学生的学习兴趣和主动性,我们将采用多样化的教学方法。
讲授法将用于传授基本原理和理论知识,讨论法将用于促进学生之间的交流和思考。
案例分析法将用于分析实际问题,使学生能够将理论知识应用于实践。
实验法将用于验证理论,培养学生的实验技能和观察能力。
通过多种教学方法的结合,我们将能够更好地满足学生的学习需求,提高教学效果。
四、教学资源为了支持教学内容和教学方法的实施,我们将选择和准备适当的教学资源。
教材将是主要的教学资源,我们将选用权威和实用的教材,确保学生能够获得准确的知识。
参考书将提供更多的学习资料,帮助学生深入理解二维滑台的相关知识。
多媒体资料将用于辅助教学,使学生能够更直观地理解二维滑台的工作原理。
实验设备将是重要的教学资源,我们将准备相应的实验设备,让学生能够进行实际操作和实验。
通过丰富多样的教学资源,我们将能够提高学生的学习体验,增强学习的趣味性和实用性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验一二维平台综合实验
机电一体化概念
机电一体化是利用计算机的信息处理功能对机械进行各种控制的技术。
可以毫不过分的说,当今世界上各种灵巧便利的机械,都是基于机电一体化技术制造的。
此外,机电一体化技术在家用电器、各种车辆、医疗器械、工厂、游乐园等各种领域、场所都得到了广泛的应用。
现在,中国正在经历着前所未有的巨大变革。
中国在进行改革开放的20多年里,适逢以电子制造业为基础的信息产业迅速发展,媒体不厌其烦的宣传中国面向信息产业的人才培养滞后,因此出现了现在接受高等教育的优秀青年不约而同地选择信息和计算机科学,而使本来就基础薄弱的制造业更加呈现人才不足的危险状况。
这样一来,硬件技术和软件技术的不平衡,必将导致对两者都不利的严重后果。
为了适当扭转这种局面,必须使接受高等教育的学生理解机电一体化,并对其有兴趣。
在此基础上,在进一步研究和提高制造技术,这就是本教材的编写目的
机电一体化(mechatronics)一词是机械和电子两个词的合成词,20世纪70年代中期由日本首先开始使用,很快便得到欧美各国的普遍认同,并得到广泛使用。
但迄今为止,其精确定义尚不明确,但从广义上可简要概括为“机械工程与电子工程相结合的技术,以及应用这些技术的机械电子装置。
表1是根据该定义对机电一体化应用的分类和举例。
表1 机电一体化实例
应用举例
原来由机械机构实现动作的装置,通过与电子技术相结合来实现同样运动的新的装置。
发条式钟表 -> 石英钟表
手动照相机 -> 自动(微机控制)照相机机械式缝纫机 -> 电动(电子式)缝纫机机械式调速器 -> 电子式调速器
原来由人来判断决定动作的装置变为无人操作的装置自动售货机,自动出纳机(ATM),自动售票机,邮局自动分检机,无人仓库,船舶和飞机的自动导航装置等。
按照人编制的程序来实现灵活动作的装置数控机床,工业机器人,智能机器人,各种机器人等
如上所述,机械工程学科和电子工程学科是机电一体化的两个支柱。
但除此之外,机电一体化还是控制工程和信息工程学科等的多学科综合技术。
图1是构成和支撑机电一体化的学科和技术。
图1 机电一体化学科的构成
采用机电一体化技术设计和制造的产品和系统具有以下几个方面的特点:
1、体积小、重量轻:由于半导体与集成电路技术的提高和液晶技术的发展,使得控制装置和测量装置可以做成原来重量和体积的几分之一甚至几十分之一,迅速向轻型化和小型化发展。
2、速度快、精度高:随着电路集成度的不断提高,处理速度和响应速度也迅速提高,使机电一体化装置总的处理速度能够充分满足实际应用的需要。
3、可靠性高:由于激光和电磁应用技术的发展,传感器和驱动控制器等装置已采用非接触式代替了接触式,避免了原来机械接触存在的注油、磨损、断裂等问题,使可靠性得到大幅度提高。
4、柔性好:机电一体化系统通常可以通过改变计算机软件就可以实现最佳运动,并增加新的运动,具有很强的可扩展性。
机电一体化系统的组成如图2,大致可分为四个组成部分:
1、机械部分:像数控工作台和机器人那样实现目标轨迹和动作。
2、执行装置:将信息转化为力和能量,以驱动机械部分运动。
3、传感器:用于对输出端的机械运动结果进行测量、监控和反馈。
4、控制装置:对机电一体化系统的控制信息和来自传感器的反馈信息进行处理,向执行装置发出动作指令。
图2 机电一体系统的组成
机电一体化系统的规划和设计方法因操作目的不同而千差万别,但作为共性问题需要对以下几个方面进行讨论。
1、认真分析系统操作目的,确定系统操作功能;
2、根据系统操作功能,确定系统的动作机构,和运动组合顺序;
3、确定操作力的大小和方向,并据此确定动力源和驱动装置;
4、选择并确定控制监测所需要的各种传感器;
5、确定控制算法和控制系统:用框图或者流程图来表达所要控制的目标。
6、对上述2)、3)、4)、5)项,进行机械、电气、硬件和软件的设计。
对材料强度、结构体积和重量进行校验,并进行软件编制。
7、必要时进行模拟仿真,对算法和系统进行检验。
8、进行产品制造和订货采购。
9、进行精加工、装配和调试。