应用LPOE公式与遗传算法标定导引头运动学参数
AOI系统定位偏差分析与标定算法

中图分类 号 : H1 ,2 6 文献标 识码 : T 6P8 A
J —
பைடு நூலகம்
£ ——L—
1 日 吾 【 J
在表面贴装技术 (ufc o nig eh ooyS )生产 Sr e u t c nl 。MT a M nT g 中, 自动光学检测技术 ( uo aiO t aIset n, O ) A t t pi lnpci A I已得到 m c c o 广泛应用。 然而 S T生产线人员流动性大 、 M 非周期性变动频率高 等特点 , A I 对 O 程序的通用性提出了更高的要求 。A I O 程序设计 要添加检测元件 , 以指定检测 区域 ( 焊点 ) 并设定检查参数 _所添 1 ] 。 加的元件定位准确对于检测过程是非常重要的。 电阻元件检测 区 域结构图, 如图1 所示。
25
一
8 0
2元件坐标偏差分析
21检测程 序元件坐标 偏差 .
A I O 图像采集系统包括镜头 、 工业相机、 滚珠丝杠 、 直线导轨 、
改进遗传算法在初始波长定标中的应用

改进遗传算法在初始波长定标中的应用薛续磊;叶中付【摘要】在LAMOST和SDSS二维光谱数据处理的初始波长定标操作中,通常给定色散曲线的一组初始拟合系数,然后在其附近一定空间内进行搜索,以期找到一组最优的系数.这实际上是一个全局寻优的问题.LAMOST和SDSS目前使用的是枚举式搜索方式,但是由于缺乏全局最优解的先验知识,需要大量的时间遍历整个解空间才能得到全局最优解.遗传算法由于使用了启发式搜索方式,是一种高效的全局寻优算法.在标准遗传算法的框架上,通过使用有效的编码方式、适应度函数以及选择、交叉、变异等遗传算子,构造了一种能够用于初始波长定标的快速收敛的改进遗传算法.通过Shaffer's F6函数的测试,该改进遗传算法具有良好的全局收敛性.将该改进遗传算法引入到LAMOST初始波长定标的寻优操作中,实验表明该算法能够取得较好的效果.【期刊名称】《天文研究与技术-国家天文台台刊》【年(卷),期】2009(006)003【总页数】10页(P181-190)【关键词】遗传算法;适应度;优化;初始波长定标【作者】薛续磊;叶中付【作者单位】中国科学技术大学信号统计处理研究室,安微,合肥,230027;中国科学技术大学信号统计处理研究室,安微,合肥,230027【正文语种】中文【中图分类】TP301波长定标在LAMOST[1](Large Sky Area Multi-Object Fiber Spectroscopy Telescope)和SDSS(Sloan Digital Sky Survey)的二维光谱数据处理中具有重要作用,波长定标的准确性对光谱数据的后续处理产生重大影响。
一种常用的波长定标方法为使用多项式拟合CCD像素与光子波长的对应关系,即色散曲线。
在LAMOST和SDSS的波长定标中,首先利用初始波长定标操作确定一条初始色散曲线,然后对各条定标谱线均在此初始色散曲线的基础上进行适当的修正得到最终色散曲线。
一种结合遗传算法和LM算法的摄像机自标定方法
线的 , 并且不需要摄像机做特殊运动 , 因此摄像机 自 标 定技 术 具有相 当大 的理 论价 值和 实用 价值 。本文 设计并实现了一种结合 L M算法和遗传算法 ( A) G
的摄像 机 自标 定 方法 。首 先利 用 G A获得 若 干组摄 相机 内外 参数 的初 始 值 , 着 利 用 L 算 法 对 每 一 接 M 组参 数进 行优 化 , 然后 选 取 映 射 误 差最 小 的那 组 参
l读入 l lIT算法 l lK — e F S dt e l l A S C l r NA R l 多视点 提取 — — l 算法匹配 l 去除误匹 1 — ]
l图像 l l特征 点 l l特征 点 I l 特征点 l l 配
合。摄像机 自标定 概念 的提 出使得摄像 机标定 在 场景 未知 和摄像 机运 动未 知 时成为 可能 。相 比于
以上两 种摄像 机 标定 技 术 , 像 机 自标 定技 术 是 在 摄
系, 再通过 投影到图像平面, 可以得到投影点 m 。
12 极 线 几 何 .
在 多视 点视 频 中 , 立体 匹配 是一项 关键 技术 , 极
1 摄 像 机 标 定 模 型 和 极 线 几 何
1 1 摄 像机标定模型 .
假设空间一点 , 在世界坐标系上 的坐标为 [
yz ] 点 在 图像平 面上 的相 应投 影点 为 m, , m在
2 摄 像 机 自标 定
图 2显 示 了摄 像 机标 定 的总体 流 程 , 括 两部 包
H标磊 像 差荸畲
图 1 摄 像 机 标 定 模 型 ( 、 和 z 表 世 界 y 代
图 2 摄 像 机 自标 定 算 法 的 总体 流 程
坐标 系,
先进的PID控制
北京化工大学本科毕业论文题目:基于遗传算法整定的PID控制院系:专业:电气工程及其自动化班级:________ ____ _ _ _____ 学生姓名:____________ ________ _____ 执导老师:___________ ______________ ______论文提交日期:年月日论文答辩日期:年月日摘要PID控制器是在工业过程控制中常见的一种控制器,因此,PID参数整定与优化一直是自动控制领域研究的重要问题。
遗传算法是一种具有极高鲁棒性的全局优化方法,在自控领域得到广泛的应用。
针对传统PID 参数整定的困难性,本文提出了把遗传算法运用于PID参数整定中。
本文首先对PID控制的原理和PID参数整定的方法做了简要的介绍。
其次介绍了遗传算法的原理、特点和应用。
再次,本文结合实例阐述了基于遗传算法的PID参数优化方法,采用误差绝对值时间积分性能指标作为参数选择的最小目标函数,利用遗传算法的全局搜索能力,使得在无须先验知识的情况下实现对全局最优解的寻优,以降低PID参数整定的难度,达到总体上提高系统的控制精度和鲁棒性的目的。
最后,本文针对遗传算法收敛速度慢、易早熟等缺点,将传统的赌盘选择法与最优保存策略结合起来,并采用改进的自适应交叉算子和自适应变异算子对PID参数进行迭代寻优整定。
采用MATLAB对上述算法进行仿真验证,仿真结果表明了遗传算法对PID参数整定的有效性。
关键词:PID;参数控制;遗传算法;MATLABAbstractPID controller is a kind of controller that is usual in industrial process control. Therefore, tuning and optimization of PID parameters are important researchable problems in the automatic control field, where Genetic algorithm is widely used because of the highly robust global optimization ability of it. Aiming at the difficulty of traditional tuning of PID parameter, this paper puts forward a method that genetic algorithm is applied to the tuning of PID parameters.Firstly, the principle of PID control and the methods of tuning of PID parameters are introduced briefly. Secondly, this paper introduces the principle, characteristics and application of genetic algorithm. Thirdly, this article expounds on the methods of tuning of PID parameters based on genetic algorithm with an example. In this paper, the performance index of time integral of absolute error serves as the minimum objective function in the tuning of PID parameters, and the global search ability of genetic algorithm is used, so the global optimal solution is obtained without prior knowledge, and the difficulty of tuning of PID parameter is reduced, so the goal is achieved which is improving the control accuracy and robustness of the system overall. Finally, aiming at the weakness of genetic algorithm, such as the slow convergence of prematurity and precocious, the traditional gambling site selection method and elitist model are united in this paper, and the paper alsoadopted adaptive crossover operator and adaptive mutation operator to optimize PID parameters iteratively.Use MATLAB to simulate these algorithms, and the simulation results show that PID controller tuning based on genetic algorithm is effective.Keywords: Genetic algorithm; PID control; optimum; MATLAB目录第一章引言 (1)1.1 课题研究的背景及意义 (1)1.2 PID控制的发展与现状 (1)1.3 本文研究的内容 (2)第二章PID控制 (4)2.1 PID控制原理 (4)2.2 常规PID参数整定方法 (6)2.2.1 Ziegler-Nichols整定方法 (6)2.2.2 改进的Ziegler-Nichols整定方法 (8)2.2.3 ISTE最优设定方法的经验公式 (9)2.2.4 Haalman法的计算公式 (10)2.2.5 KT整定法 (11)第三章基于遗传算法整定的PID控制 (13)3.1 遗传算法基本原理 (13)3.1.1 遗传算法概要 (13)3.1.2 遗传算法的应用步骤 (14)3.2 遗传算法的实现 (15)3.2.1 编码方法 (15)3.2.2 适应度函数 (16)3.2.3 选择算子 (17)3.2.4 交叉算子 (17)3.2.5 变异算子 (18)3.2.6 遗传算法控制参数选取 (19)3.3 遗传算法的仿真验证 (20)3.2.6遗传算法中关键参数的确定 (23)3.3 遗传算法的主要步骤 (23)3.3.1 准备工作 (23)3.3.2 基本遗传算法的步骤 (24)3.4遗传算法PID参数整定的编程实现 (24)3.4.1初始群体 (24)3.4.2 编码 (25)3.4.3 基本操作算子 (26)3.4.4 目标函数 (29)3.4.5 画图 (29)第四章PID整定方法的仿真应用 (31)4.1 一阶对象 (31)4.2 二阶对象 (32)4.3 三阶对象 (34)第五章结论 (37)参考文献 (38)致谢 (40)第一章引言1.1 课题研究的背景及意义PID(p一proportion,I一Integral,D一Differentia)控制是比例、积分、微分控制的简称PID[l]。
利用遗传算法进行PID参数寻优的倒立摆控制系统
遗传算法 G s (A)] 1是一种公认的具有全局最优搜索
能力的优化方法。以往的局部寻优算法如梯度下降法是 确定性 的方法,而且其寻优效果往往取决于是否设定了 合适的初始值。而遗传算法是一种随机性的全局优化方 法,除非人为终止,其进化过程将永无休止,因而其随 机特性使其可以跳出局部极值的误区而最终发现全局最 优。另外,遗传算法的初始值可以随机设定。 本文为小车倒立摆系统设计了一个 P I D控制器,然 后利用遗传算法对控制器的 8 个参数进行 自寻优。在对 遗传算法的染色体进行编码时本文采用了一种创新的方 法 ,将 8 个参 数构成 一个 2 4的矩 阵 ,从 而保 证 了交 x
遗传算法的搜索过程如下川:
() 1 初始化种群 ;
( ]= . , . , 倒立摆偏角甲 通过同 o T [ 0 0 0 9 oT ) 0 5 , ] 0 。 可以 轴旋转电 位计送出 正比T 信号。 的电
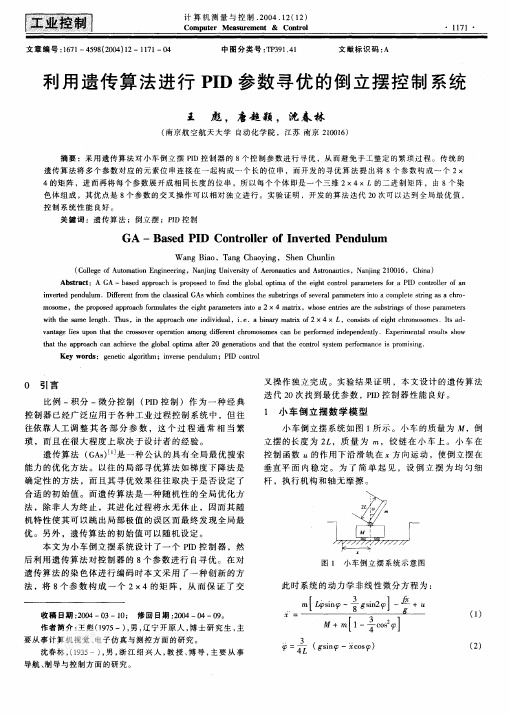
由图I P 0 可见,C 是小车的不稳定平衡点,只要 二
稍有干扰,倒立着的单摆马上会倒下去。相反,如果这 时采用合适的控制信号 u ) ( ,使小车以一定的规律来 c 回跑动,倒立的单摆就可以在垂直平面内稳定下来。这 对控制系统提出了很高的要求,因此小车倒立摆也成为 评价控制系统性能的有力工具。
wt t s e g . s i t ap ah i ida, . i r m tx x L c sto e h cr o m s I a- i h a l t Tu, h pr c oe v ul i a a aio2 x o is i t m s e. d h m e h h n e n e o n n i d . b y r f 4 , n s f h e n g o o t s
可以看出,倒立摆 的稳定与小车的位置 x没有直接关 系,但由于小车运动边界的限制,小车不可以毫无限制
遗传算法的使用方法和技巧指南

遗传算法的使用方法和技巧指南遗传算法是一种启发式优化算法,它模拟了自然界中的生物进化过程来解决问题。
它具有强大的搜索能力和全局优化能力,在各个领域都有广泛的应用。
本文将介绍遗传算法的基本原理、使用方法以及一些重要的技巧指南。
一、遗传算法的基本原理遗传算法基于生物进化的思想,通过模拟人工选择、交叉和变异等过程来生成和更新解的种群,并利用适应度函数对种群进行评估和选择,以期望通过迭代的方式找到最优解。
遗传算法的基本流程如下:1. 初始化种群:随机生成一组个体作为初始种群。
2. 适应度评估:根据问题的特定要求,计算每个个体的适应度值。
3. 选择操作:利用适应度值选择父代个体进行繁殖,常用的选择算法有轮盘赌选择和竞争选择等。
4. 交叉操作:通过交叉运算生成新的后代个体,交叉操作能够保留父代的有益特征。
5. 变异操作:对交叉后的个体进行基因的随机变异,增加种群的多样性。
6. 替换操作:根据一定的规则,用新生成的后代个体替换原始种群中的一部分个体。
7. 终止条件判断:根据迭代次数或者达到某个预定义的解的条件,判断是否终止迭代。
8. 返回最优解。
二、遗传算法的使用方法为了正确有效地使用遗传算法,我们需要遵循以下几个步骤:1. 理解问题:首先,要准确理解问题的特性和要求,包括确定问题的目标函数、约束条件等。
只有对问题有清晰的认识,才能设计合适的遗传算法。
2. 设计编码方案:将问题的解表示为染色体的编码方案,更好的编码方案可以减少解空间的搜索范围。
常用的编码方式有二进制、浮点数、整数等。
3. 确定适应度函数:根据问题的特点,设计合适的适应度函数用于度量个体的优劣。
适应度函数应能够将问题的目标转化为一个数值,使得数值越大越好或者越小越好。
4. 选择操作:选择操作决定了如何根据适应度值选择父代个体。
常用的选择算法有轮盘赌选择、竞争选择、排名选择等。
轮盘赌选择是普遍应用的一种方法,根据个体的适应度值按比例选择。
5. 交叉操作:交叉操作决定了如何生成新的后代个体。
遗传算法参数选择的实用经验与建议

遗传算法参数选择的实用经验与建议遗传算法是一种模拟自然进化过程的优化算法,广泛应用于解决复杂的优化问题。
在遗传算法的实施过程中,参数的选择对算法的性能和收敛速度起着至关重要的作用。
本文将介绍一些实用的经验和建议,帮助读者更好地选择遗传算法的参数。
1. 个体数量的选择个体数量是遗传算法中的一个重要参数,它决定了搜索空间的覆盖程度。
通常来说,个体数量越多,搜索能力越强,但也会增加计算成本。
因此,在选择个体数量时需要权衡搜索能力和计算成本。
一般来说,个体数量应该大于问题的维度,以确保搜索空间的充分覆盖。
2. 交叉概率和变异概率的选择交叉概率和变异概率是遗传算法中的两个重要参数,它们决定了遗传算法中遗传操作的强度。
交叉概率决定了父代个体进行交叉操作的概率,而变异概率决定了个体进行变异操作的概率。
在选择交叉概率和变异概率时,需要根据问题的特点进行调整。
一般来说,交叉概率应该较高,以增加种群的多样性;而变异概率应该较低,以保持种群的稳定性。
3. 选择操作的选择选择操作是遗传算法中的一个重要环节,它决定了哪些个体将被选择为下一代的父代个体。
常用的选择操作有轮盘赌选择、锦标赛选择等。
在选择操作的选择时,需要考虑问题的特点和算法的性能。
轮盘赌选择适用于连续优化问题,而锦标赛选择适用于离散优化问题。
同时,还可以考虑使用多种选择操作进行组合,以提高算法的性能。
4. 终止条件的选择终止条件是遗传算法中的一个重要参数,它决定了算法的停止条件。
常用的终止条件有达到最大迭代次数、目标函数值收敛等。
在选择终止条件时,需要根据问题的特点和算法的性能进行调整。
一般来说,终止条件应该设置得足够宽松,以确保算法能够在有限的时间内收敛。
5. 适应度函数的选择适应度函数是遗传算法中的一个核心部分,它用于评估个体的适应度。
在选择适应度函数时,需要根据问题的特点进行设计。
适应度函数应该能够准确地反映个体在问题空间中的优劣程度。
同时,还可以考虑使用多个适应度函数进行组合,以提高算法的性能。
机器人的运动学参数标定与标定精度
机器人的运动学参数标定与标定精度在工业自动化领域,机器人技术的快速发展给生产制造行业带来了革命性的变革。
机器人已成为生产线上的重要组成部分,其灵活性、精准性和效率极大地提升了生产效率。
然而,要使机器人能够实现复杂的运动控制和任务执行,就需要准确标定其运动学参数。
机器人的运动学参数标定是指确定机器人的三维坐标系和链接参数,这些参数包括关节角度、长度、质量、惯性等。
只有在准确标定了这些参数之后,机器人才能根据预先设定的控制指令来完成各种任务。
传统的机器人运动学参数标定方法主要基于机械设计数据和理论计算,其局限性在于无法考虑到实际环境中的误差和不确定性。
而且,由于机器人的复杂性和多自由度特性,往往导致运动学参数标定结果不够准确,影响了机器人的运动控制精度和稳定性。
因此,如何提高机器人的运动学参数标定精度成为一个迫切需要解决的问题。
近年来,随着传感器技术、数据处理算法和机器学习等方面的不断进步,人们提出了许多新的方法和技术来改善机器人的运动学参数标定精度。
其中,视觉标定方法是一种较为常用的方法,它通过摄像头捕捉机器人末端执行器在工作空间中的位置和姿态信息,然后利用相机标定算法计算出机器人的运动学参数。
由于视觉系统具有实时性、非接触性和高精度的特点,因此在工业机器人的应用中得到了广泛的应用。
另外,惯性传感器、编码器和激光测距仪等传感器也被广泛应用于机器人运动学参数标定中,通过这些传感器获取机器人的运动状态和姿态信息,进而计算出其运动学参数。
除了传感器技术的应用,还有一些基于数据处理算法和数学模型的方法也可以提高机器人的运动学参数标定精度。
例如,基于最小二乘法的非线性优化算法能够对机器人的标定数据进行拟合,从而减小标定误差。
另外,基于机器学习的方法也具有很大的潜力,通过训练数据集和深度学习算法,可以实现对机器人运动学参数的自动标定和更新,提高标定的精度和效率。
在实际应用中,机器人的运动学参数标定精度对其运动控制和路径规划至关重要。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
( 1 . C h a n g c hu n I n s t i t u t e o / Op t i  ̄ ’ S,Fi n e Me c h a n i c s a n d Ph y s i c s ,C h i n e s e Ac a d e my o J 、 S t i e m’ e s,
a nd g e n e t i c a l g o r i t h m
ZH A ( )M i n g ~ , ZH U M i ng c ha o ,BA I Ya n g ,LI U Hu i ,W A N G Ta o ,
J I A Ho n g — g u a n g 。XU AN Mi n g
定平 台的光机结构特点 , 应用局部 指数积( I P ( ) E ) 公式 建立了导引头理论运动学模 型 ; 通 过 分 析 轴 系 误 差 对 运 动 学 参 数
的影 响 , 修 正 了理 论 运 动 学 模 型 。 然后 , 结 合 参 数标 定 原 理 , 设 计 了遗 传 算 法 。该 算 法 采 用 多 点 交 叉 与 自适 应 变 异 概 率 来 提 高 搜 索 效 率 并 求 得 全 局 最 优 解 。 以视 轴 静 态 指 向 误 差 为 目标 函数 ,利 用 遗 传 算 法 对 运 动 学 参 数 进 行 了 辨识 。最 后, 利 用 激 光 跟 踪 仪 测 得 两 组 数 据 ,分 别 用 于 辨 识 参 数 及 验证 标 定 模 型 。实 验 结 果 表 明 : 视 轴 的 静 态 指 向 精 度 由标 定 前 的1 o 9 . 9 提高 钊 2 2 . 3 ” ,显示 提 出 的标 定 方 法 能 够 有 效 的 修 正 导 引 头 运 动学 参 数 。 关 键 词 : 导引头 ; 参数标 定; 局部指数积公式 ; 遗传算法 ; 激 光 跟 踪 仪
*Cf J r , 一 0 卵 g a u t h o r ,E- ma i l : i a h g ( ( ’ i o m p. a c . c n
Ab s t r a c t : A c a l i br a t i on me t h od f or k i ne ma t i c p a r a me t e r s O f a s e e ke r wa s r e s e a r c h e d t o i mp r ov e t he
( 1 . 中国科学院 长春光学精 密机械与物理研究所 , 吉林 长春 1 3 0 0 3 3 ; 2 . 中国科学院大学, 北京 1 0 0 0 3 9 )
摘要: 提 出 了一 种 导 引 头运 动学 参 数 标 定 方 法 , 用 于提 高 两 轴 双 框 架 导 引 头 的视 轴 静 态 指 向 精 度 。首 先 ,根 据 导 引 头 稳
l ane o f Si gh t( I . OS ) s t a t i c po i n t i n g pr e c i s i on of t he s e e k e r . Ba s e d o n t he op t o — me c ha n i c a l s t r uc t u r e
a l y z i ng t h e i mp a c t of a x i a l e r r o r s on ki n e ma t i c pa r a me t e r s . Ac c o r d i ng t o t h e p r i nc i p l e of p a r a me t e r c a l i b r a t i o n,a g e ne t i c a l g o r i t hm wa s d e s i gn e d t o i mp r ov e t he s e a r c hi ng e f f i c i e n c y b y us i n g mu l t i — po i n t
Vo 1 . 2 2 NO . 3
Ma r .2 01 4
2 0 1 4年 3月
文 章 编 号 1 0 0 4 9 2 4 X( 2 0 1 4 ) 0 3 0 6 8 7 0 8
应用 L P OE公 式 与遗传 算 法标定 导 引头运 动学参数
赵 明 ~, 朱明超 ,白 杨 , 刘 慧 ,王 涛 , 贾宏光 ,宣 明
目前导引头一般采用稳定平台来隔离弹体扰动从而实现稳定高到平台框架加工装配误差以及调校精度引起的各轴系几何误差的影响引头的实际运动惯性空间的稳定
第 2 2卷
第 3期
光 学 精 密 工 程
Opt i c s a nd Pr e c i s i on En gi ne e r i n g
f e a t u r e of t h e s e e ke r s t ab i l i z e d p l a t f o r m ,t he i de a l ki n e ma t i c mod e l o f t h e s e e k e r wa s e s t a bl i s h e d b y
Cha ngc hun 1 3 0 03 3,Chi na;
2 . Un i v e r s i t y o f Ch i n e s e Ac a d e my o f S c i e n c e s ,Be i j i n g 1 0 0 0 3 9,Ch i n a )
l oc a l pr od uc t — o f — e x po ne nt i a l s( I . PO E) f o r mu l a . The n,t he i d e a l ki n e ma t i c mo d e l wa s c o r r e c t e d by a n —
中图分类号 : T J 7 6 5 . 3 3 2 ; T P 2 7 3 文献 标 识 码 : A d o i : 1 0 . 3 7 8 8 / ( ) P E . 2 0 1 4 2 2 0 3 . 0 6 8 7
Ca l i b r a t i o n o f ki ne ma t i c p a r a me t e r s o f s e e k e r s b y LPOE f o r mu l a