第五篇 用C语言操作引脚
单片机引脚功能及连接技巧介绍

单片机引脚功能及连接技巧介绍概述:单片机(Microcontroller),简称MCU,是一种集成了处理器(CPU)、内存(RAM/ROM)、IO口、计时器/计数器和串行通信接口等功能的微型电脑。
引脚是单片机与外部电路之间的接口,通过引脚来完成与外界的数据交换。
在设计单片机电路时,了解单片机引脚的功能和连接技巧非常重要,本文将介绍常见的单片机引脚功能及连接技巧。
1. IO口引脚功能及连接技巧IO(Input/Output)口是单片机最常用的引脚类型,用于输入和输出数字信号。
根据不同的功能,IO口可以分为普通IO口、输入口和输出口。
1.1 普通IO口普通IO口可以作为输入和输出使用。
连接普通IO口时,需要注意以下几点:- 输入:为了保证输入信号的稳定性,通常会使用外部上拉电阻或下拉电阻对引脚进行连接。
- 输出:当将IO口设为输出时,需要连接到其他设备的输入端。
为了防止损坏引脚,常常需要添加电流限制电阻。
1.2 输入口输入口用于接收来自外部的信号,并将其传递到单片机内部进行处理。
连接输入口时,需要注意以下几点:- 使用外部元器件(如开关、传感器等)将信号连接到输入口,同时需要连接电源和地。
- 为了保证输入信号的稳定性,可以采用滤波电路或者添加电阻电容等元器件。
- 在单片机代码中,需要对输入口进行初始化(包括输入模式、上拉/下拉等),以便正确读取信号。
1.3 输出口输出口用于将单片机内部的信号发送给外部设备。
连接输出口时,需要注意以下几点:- 输出口可以驱动LED、继电器,以及其他需要数字信号控制的设备。
- 为了保证输出信号的电流和电压稳定,通常需要使用驱动电路或开关电源等辅助电路。
- 在单片机代码中,需要对输出口进行初始化(包括输出模式、上下拉电阻、推挽输出或开漏输出等)。
2. 定时器/计数器引脚功能及连接技巧定时器/计数器是单片机中的重要功能模块,用于计时、计数或产生特定的时间序列。
定时器/计数器有多个引脚与之关联,其中包括计数引脚、输入引脚和输出引脚。
单片机引脚功能介绍

单片机引脚功能介绍单片机是一种集成电路芯片,可以完成各种任务的控制器。
它在电子设备中广泛应用,通常包含多个引脚,每个引脚有不同的功能。
在本文中,将介绍一些常见的单片机引脚功能。
1.供电引脚:供电引脚用于为单片机供电。
通常,单片机有多个供电引脚,例如VCC和GND。
2.输入引脚:输入引脚用于接收外部信号。
单片机常用的输入引脚类型有GPIO(通用输入输出引脚)、模拟输入引脚、串口接收引脚等。
3.输出引脚:输出引脚用于向外部设备发送信号。
单片机常用的输出引脚类型有GPIO(通用输入输出引脚)、PWM输出引脚、模拟输出引脚等。
4.复位引脚:复位引脚用于将单片机复位到初始状态。
当复位引脚接收到复位信号时,单片机会执行一些特定的操作,例如清除寄存器和重启程序。
5.时钟引脚:时钟引脚提供单片机的时钟信号。
时钟信号通常由晶体振荡器提供,用于同步单片机内部的操作。
时钟信号的频率决定了单片机的运行速度。
6.中断引脚:中断引脚用于处理紧急事件或高优先级任务。
当中断引脚接收到中断信号时,单片机会暂停当前执行的程序,跳转到中断处理程序,并在处理完中断后返回原来的程序。
7.地址引脚:地址引脚用于选择特定的外部设备。
例如,通过选择不同的地址引脚,可以同时连接多个存储器芯片来扩展单片机的存储容量。
8.数据引脚:数据引脚用于向外部设备发送或接收数据。
单片机通常有多个数据引脚,用于传输二进制数据。
9.读使能引脚和写使能引脚:读使能引脚和写使能引脚用于激活读取或写入操作。
当读使能或写使能引脚处于特定状态时,单片机可以与外部设备进行数据传输。
10.外部中断引脚:外部中断引脚用于处理外部事件的中断。
当外部中断引脚接收到特定信号时,单片机可以触发中断并执行相应的处理代码。
11.定时器引脚:定时器引脚用于测量时间间隔或生成定时器中断。
单片机中的定时器可以用于各种应用,例如产生精确的时间延迟、计算脉冲宽度等。
12.AD转换引脚:AD转换引脚用于将模拟信号转换为数字信号。
单片机各个引脚功能概述
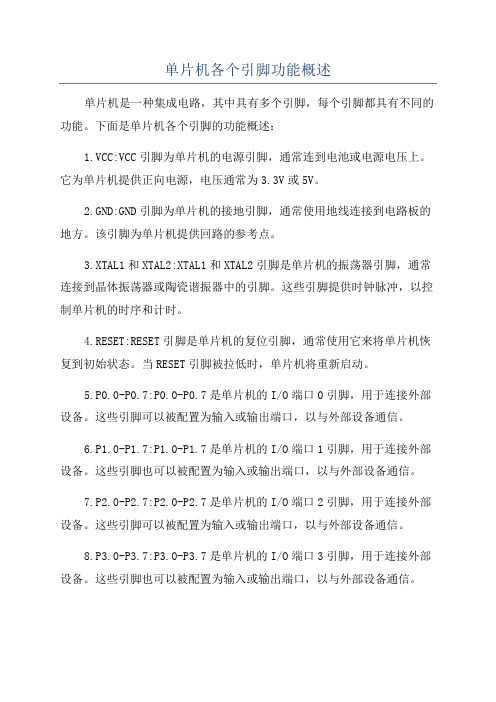
单片机各个引脚功能概述单片机是一种集成电路,其中具有多个引脚,每个引脚都具有不同的功能。
下面是单片机各个引脚的功能概述:1.VCC:VCC引脚为单片机的电源引脚,通常连到电池或电源电压上。
它为单片机提供正向电源,电压通常为3.3V或5V。
2.GND:GND引脚为单片机的接地引脚,通常使用地线连接到电路板的地方。
该引脚为单片机提供回路的参考点。
3.XTAL1和XTAL2:XTAL1和XTAL2引脚是单片机的振荡器引脚,通常连接到晶体振荡器或陶瓷谐振器中的引脚。
这些引脚提供时钟脉冲,以控制单片机的时序和计时。
4.RESET:RESET引脚是单片机的复位引脚,通常使用它来将单片机恢复到初始状态。
当RESET引脚被拉低时,单片机将重新启动。
5.P0.0-P0.7:P0.0-P0.7是单片机的I/O端口0引脚,用于连接外部设备。
这些引脚可以被配置为输入或输出端口,以与外部设备通信。
6.P1.0-P1.7:P1.0-P1.7是单片机的I/O端口1引脚,用于连接外部设备。
这些引脚也可以被配置为输入或输出端口,以与外部设备通信。
7.P2.0-P2.7:P2.0-P2.7是单片机的I/O端口2引脚,用于连接外部设备。
这些引脚可以被配置为输入或输出端口,以与外部设备通信。
8.P3.0-P3.7:P3.0-P3.7是单片机的I/O端口3引脚,用于连接外部设备。
这些引脚也可以被配置为输入或输出端口,以与外部设备通信。
9.INT0和INT1:INT0和INT1引脚是单片机的外部中断引脚,用于检测外部中断事件。
这些引脚通常用于响应外部事件,例如按下按钮或检测外部信号。
10.TXD和RXD:TXD引脚是单片机的串行传输引脚,用于发送串行数据。
RXD引脚是单片机的串行接收引脚,用于接收串行数据。
这些引脚通常用于单片机与其他设备(例如计算机或传感器)之间的通信。
11.ADC0-ADC7:ADC0-ADC7引脚是单片机的模拟输入引脚,用于连接模拟传感器或外部设备。
单片机引脚功能与配置详解

单片机引脚功能与配置详解单片机是一种集成电路,它具有处理数据和控制外部设备的能力。
它的引脚是连接内部电路与外部设备之间的桥梁,通过配置这些引脚的功能,实现与外界的交互。
本文将详细解释单片机引脚的功能与配置方法。
1. 引脚的基本功能单片机的引脚可以分为输入引脚和输出引脚两种基本功能。
输入引脚:用于接收来自外部设备的信号或数据。
输入引脚需要配置为输入模式,以便能够接收外部设备发送的数据。
通过配置引脚输入的电平范围,可以实现不同类型的信号接收。
输出引脚:用于向外部设备发送信号或控制信号。
输出引脚通过配置输出电平和输出电流的大小,可以控制外部设备的工作状态。
2. 引脚的配置方法单片机的引脚配置方法有两种常见的方式:软件配置和硬件配置。
软件配置:单片机通常具有专用的寄存器来配置引脚的功能。
通过修改这些寄存器的值,可以改变引脚的工作模式和工作参数。
例如,可以通过设置寄存器的位来配置引脚为输入模式或输出模式,以及配置输出电平和输入电平的范围。
硬件配置:一些单片机具有多个引脚,其中一些引脚具有多种功能选择。
在硬件配置方法中,通过连接引脚到不同的管脚,可以选择引脚的功能。
这通常需要使用外部电路或器件来实现。
3. 引脚功能的示例I/O引脚:I/O引脚是单片机最常用的引脚类型,可以作为输入或输出引脚。
通过配置为输入模式,它可以接收来自传感器或其他外部设备的信号,并将其传输到单片机的内部电路中进行处理。
通过配置为输出模式,它可以向外部设备发送控制信号或数据。
定时器/计数器引脚:单片机中的定时器和计数器功能通常需要连接到特定的引脚。
通过配置引脚的功能为定时器/计数器模式,它可以计算输入脉冲信号的频率或脉冲宽度,并将结果传递给单片机进行处理。
中断引脚:中断引脚用于处理紧急事件或异步事件。
通过配置引脚为中断功能,当引脚输入电平发生变化时,单片机会立即停止当前的工作,执行特定的中断服务程序来处理该事件。
串行通信引脚:单片机通常具有用于串行通信的引脚。
PIC单片机C语言教程

PIC单片机C语言教程PIC单片机(Peripheral Interface Controller)是德州仪器(Texas Instruments)公司生产的一款微控制器芯片。
它具有高性能、低功耗、易编程等特点,因此被广泛应用于各种电子设备中。
PIC单片机的编程语言主要是C语言。
C语言是一种广泛使用的高级程序设计语言,它结构简洁、表达能力强、可移植性好。
通过使用C语言,我们可以轻松地编写控制PIC单片机的程序,并且可以充分发挥PIC单片机的特性和功能。
在PIC单片机的C语言教程中,首先需要了解C语言的基础知识,包括变量、数据类型、运算符、控制语句等。
接下来,我们需要学习如何使用C语言编写PIC单片机的程序。
1.引脚配置:在PIC单片机的程序中,我们需要配置引脚的状态,包括输入输出模式、电平状态等。
通过使用C语言,我们可以方便地配置引脚,实现与外部器件的连接和通信。
2.中断编程:中断是PIC单片机的重要特性之一,可以使控制器在特定条件下停止当前任务执行,转而执行中断服务程序。
通过使用C语言,我们可以编写中断服务程序,实现特定条件下的任务切换和响应。
3.定时器编程:定时器是PIC单片机的另一个重要功能,可以实现一定时间间隔内的定时操作。
通过使用C语言,我们可以编程设置定时器的参数,以实现特定的定时操作。
4.串口通信:PIC单片机具有串口通信功能,可以与其他设备进行数据交换。
通过使用C语言,我们可以编写串口通信的程序,实现与其他设备的数据传输和交互。
5.外设控制:PIC单片机可以连接各种外设,如LCD显示屏、键盘、驱动器等。
通过使用C语言,我们可以编写控制程序,实现与外设的连接和控制。
以上只是PIC单片机C语言教程的一部分内容。
除了上述内容,我们还可以学习其他更高级的主题,如编码技巧、优化技术等。
通过系统学习和实践,我们可以掌握PIC单片机的C语言编程技巧,实现各种功能和应用。
总的来说,PIC单片机的C语言教程是一个庞大而丰富的话题,需要通过实践和深入学习来掌握。
单片机引脚功能

单片机引脚功能单片机的引脚是用来连接外部电路和器件的一组接口,它们可以用来输入或输出不同的信号。
引脚的功能可以根据需要进行灵活配置,下面将对常用的单片机引脚功能进行介绍。
1. I/O口引脚:单片机的很多引脚可以作为通用I/O口来使用,通过它们可以输入外部信号或输出控制信号。
这些引脚既能作为输入引脚来接收外部信号,也可以作为输出引脚来控制其他外部器件的工作。
2. 电源引脚:单片机需要通过引脚来接收供电,通常会有VCC引脚和GND引脚。
VCC引脚连接到正电源,GND引脚连接到地。
供电引脚是单片机正常工作的基础。
3. 复位引脚:单片机的复位引脚用于将单片机恢复到初始状态,使其重新开始工作。
复位引脚通常连接到一个复位电路,当复位电路检测到外部复位信号时,会将复位引脚拉低,从而使单片机复位。
4. 时钟引脚:单片机需要时钟信号来同步其内部操作。
时钟引脚接收外部时钟信号,并通过时钟电路提供给单片机内部。
时钟信号的频率决定了单片机的工作速度。
5. 中断引脚:中断引脚可以用来接收外部中断信号。
当外部事件触发中断引脚时,单片机会中断当前的工作,转而执行中断处理程序。
中断引脚使单片机能够实时响应外部事件,提高了系统的实时性。
6. 串口引脚:单片机的串口引脚用于与其他设备之间进行串行通信。
串口引脚通常有两个,一个是发送引脚,用于发送数据;另一个是接收引脚,用于接收数据。
串口通信是一种常见的数据传输方式,广泛应用于各种电子设备中。
7. PWM引脚:单片机的PWM引脚用来生成脉冲宽度调制(PWM)信号。
PWM信号的占空比可以通过改变引脚输出的高电平时间和低电平时间来调节。
PWM信号在很多应用中具有重要的作用,例如控制电机的速度和方向。
总之,单片机引脚的功能多种多样,可以根据需要选择不同的引脚功能来满足特定的需求。
不同的引脚功能可以通过软件配置和硬件接线来实现。
了解引脚功能的特点和使用方法能够帮助工程师更好地设计和开发单片机控制系统。
51单片机引脚介绍(全)

51单片机引脚介绍(全)51单片机引脚介绍(全)单片机(Microcontroller)是一种集成了微处理器核心、存储器和各种输入输出控制电路的集成电路芯片,广泛应用于嵌入式系统中。
而51单片机(8051 Microcontroller)是最早被广泛使用的一款单片机型号,其引脚布局和功能十分重要。
本文将对51单片机的引脚进行详细介绍,以便更好地理解和应用。
1. 引脚简介51单片机共有40个引脚,编号为P0.0至P3.7,其中P0、P1、P2、P3为4个8位的I/O端口,分别对应于32个可编程的引脚。
此外,引脚还包括VCC(供电正极)、GND(接地)以及RESET(复位引脚)、PSEN(程序存储器使能引脚)、ALE/PROG(地址锁存/编程使能引脚)、EA/VPP(外部访问使能/编程电压),共计7个特殊功能引脚。
2. I/O口的功能P0口是可用的8位双向I/O口,可以用于与外设的数据传输。
P0口在模拟输入/输出工作状态下为双向I/O口,在数字输入/输出工作状态下为输出口。
P1口也是一个可用的8位双向I/O口,用于与外设的数据传输。
P2口是一个不可用的8位双向I/O口,它被用作外部总线的高8位数据总线。
P3口是一个可用的8位双向I/O口,用于与外设的数据传输。
3. 特殊功能引脚RESET引脚是用于复位单片机的引脚。
将RESET引脚拉低,即可使单片机复位。
PSEN引脚是用于访问外部程序存储器(EPROM或闪存)的引脚。
当PSEN为高时,表示访问的是程序存储器。
ALE/PROG引脚在T0(定时器0)的溢出和外部中断0激活时产生外部地址锁存信号。
在程序编程时,它与PSEN引脚一起用作编程使能信号,并提供编程电压。
EA/VPP引脚是用于控制单片机是否使用外部存储器。
当EA/VPP 为低时,表示单片机使用外部存储器;当EA/VPP为高时,表示单片机使用内部存储器。
4. 其他引脚VCC引脚是单片机的正电源引脚,需要接入正电源。
C51单片机引脚图及引脚功能介绍

80C51单片机引脚图及引脚功能介绍(总7页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--80C51单片机引脚图及引脚功能介绍首先我们来介绍一下单片机的引脚图及引脚功能(如下图所示),引脚的具体功能将在下面详细介绍单片机的40个引脚大致可分为4类:电源、时钟、控制和I/O引脚。
⒈ 电源:⑴ VCC - 芯片电源,接+5V;⑵ VSS - 接地端;⒉ 时钟:XTAL1、XTAL2 - 晶体振荡电路反相输入端和输出端。
⒊ 控制线:控制线共有4根,⑴ ALE/PROG:地址锁存允许/片内EPROM编程脉冲① ALE功能:用来锁存P0口送出的低8位地址② PROG功能:片内有EPROM的芯片,在EPROM编程期间,此引脚输入编程脉冲。
⑵ PSEN:外ROM读选通信号。
⑶ RST/VPD:复位/备用电源。
① RST(Reset)功能:复位信号输入端。
② VPD功能:在Vcc掉电情况下,接备用电源。
⑷ EA/Vpp:内外ROM选择/片内EPROM编程电源。
① EA功能:内外ROM选择端。
② Vpp功能:片内有EPROM的芯片,在EPROM 编程期间,施加编程电源Vpp。
⒋ I/O线80C51共有4个8位并行I/O端口:P0、P1、P2、P3口,共32个引脚。
P3口还具有第二功能,用于特殊信号输入输出和控制信号(属控制总线)。
拿到一块单片机,想要使用它,首先必须要知道怎样去连线,我们用的一块89C51的芯片为例,我们就看一下如何给它连线。
1、电源:这当然是必不可少的了。
单片机使用的是5V电源,其中正极接40管脚,负极(地)接20管脚。
2、振蒎电路:单片机是一种时序电路,必须供给脉冲信号才能正常工作,在单片机内部已集成了振荡器,使用晶体振荡器,接18、19脚。
只要买来晶体震荡器,电容,连上就能了,按图1接上即可。
3、复位管脚:按图1中画法连好,至于复位是何含义及为何需要复要复位,在单片机功能中介绍。
单片机C语言入门教程

单片机C语言入门教程一、简介在现代电子技术领域中,单片机是一种关键的组成部分。
而C语言是一种强大的编程语言,被广泛应用于单片机开发中。
本教程旨在帮助读者快速入门单片机C语言编程。
二、C语言概述C语言是一种面向过程的编程语言,它结合了高级语言和汇编语言的特点。
C语言具有简洁、灵活和可移植的特点,非常适合单片机开发。
三、环境搭建在进行单片机C语言编程之前,我们需要搭建开发环境。
首先,我们需要选择一款合适的集成开发环境(IDE),例如Keil、IAR等。
然后,安装相应的编译器和调试工具。
最后,连接硬件设备并配置相应的开发板。
四、C语言基础1. 变量和数据类型:在C语言中,我们需要先声明变量并指定数据类型,然后才能进行相应的操作。
C语言中常用的数据类型包括整型、浮点型、字符型等。
2. 运算符和表达式:C语言支持多种运算符,包括算术运算符、赋值运算符、比较运算符等。
通过运算符和表达式的组合,我们可以实现各种复杂的逻辑操作。
3. 控制语句:控制语句用于控制程序的流程,常见的控制语句包括条件语句、循环语句和跳转语句。
通过合理使用这些语句,我们可以实现程序的灵活控制。
五、单片机编程基础1. 引脚配置:在进行单片机开发时,我们需要配置相应的引脚功能,包括输入、输出、中断等。
通过合理配置引脚,我们可以与外部设备进行交互。
2. 中断编程:中断是一种常用的单片机编程技术,它可以在特定的事件发生时,立即中断当前程序的执行,转而去处理中断服务程序。
通过合理使用中断,我们可以实现实时响应和处理外部事件。
3. 定时器编程:定时器是单片机中重要的计时功能模块,它可以用来生成精确的时间延时、产生周期性的定时事件等。
通过合理利用定时器,我们可以实现各种时间相关的功能。
六、案例实践在学习了C语言的基础知识和单片机编程技巧后,我们可以通过一些实践案例来加深对知识的理解和应用。
例如,通过控制LED灯的亮度或者控制舵机的角度等实践,来巩固所学内容。
单片机c语言开关程序

单片机c语言开关程序单片机是一种集成电路,它具有微处理器、存储器和输入输出端口等功能。
在单片机中,C语言是一种常用的编程语言,可以用来开发各种程序。
本文将详细介绍如何使用C语言编写一个简单的开关程序。
开关是我们日常生活中常见的一种电子元件,它可以控制电路的通断。
在单片机中,我们可以通过编写程序来控制开关的状态。
下面是一个使用C语言编写的开关程序示例:```c#include <reg52.h> // 包含单片机的头文件sbit LED = P1^0; // 将P1.0引脚定义为LED输出口sbit SW = P3^2; // 将P3.2引脚定义为开关输入口void main(){LED = 0; // 初始状态下关闭LEDwhile(1){if(SW == 0) // 当开关按下时{LED = 1; // 打开LED}else{LED = 0; // 关闭LED}}}```上述程序使用了51单片机的C语言编程,通过将P1.0引脚定义为LED输出口,P3.2引脚定义为开关输入口,实现了一个简单的开关控制LED的功能。
在主函数中,我们首先将LED置为0,即关闭LED。
然后通过一个无限循环,不断检测开关的状态。
当开关按下时,开关引脚的电平为低电平(0),此时将LED置为1,即打开LED;当开关松开时,开关引脚的电平为高电平(1),此时将LED置为0,即关闭LED。
通过这段简单的代码,我们可以实现一个基本的开关控制LED的功能。
当按下开关时,LED会亮起;当松开开关时,LED会熄灭。
这个程序可以很好地理解开关的工作原理和单片机的输入输出控制。
当然,这只是一个简单的示例程序,实际应用中可能会更加复杂。
在实际开发中,我们可以根据需要添加更多的功能,如控制多个LED灯、设置开关的触发条件等。
通过不断学习和实践,我们可以掌握更多关于单片机C语言开发的技巧和知识,实现更多有趣和实用的功能。
通过C语言编写单片机的开关程序,我们可以实现对开关状态的监测和控制。
单片机引脚功能介绍

单片机引脚功能介绍单片机是一种集成电路,可以完成特定任务的微型计算机系统。
它由许多引脚组成,每个引脚都有不同的功能和用途。
本文将介绍单片机常见的引脚功能,以帮助读者更好地理解和应用单片机。
1. 电源引脚单片机通常有多个电源引脚,包括电源正极(Vcc)和电源地(GND)引脚。
这两个引脚提供电源给单片机,确保单片机正常运行。
电源引脚通常需要连接到适当的供电电压和接地线。
2. 输入/输出引脚(I/O引脚)I/O引脚是单片机与外部设备进行数据传输的接口。
它们可以配置为输入引脚或输出引脚,根据需要来读取或控制外部设备。
单片机的I/O引脚数量可以根据具体芯片型号的不同而有所不同。
3. 串行通信引脚单片机通常具有一些引脚用于串行通信,例如UART(通用异步收发传输器)引脚、SPI(串行外设接口)引脚和I2C(双线串行通信接口)引脚等。
这些引脚使单片机能够与其他设备进行数据交换,实现更高级的功能。
4. 定时器/计数器引脚定时器/计数器引脚用于计时和计数,提供基本的时间控制功能。
通过配置定时器/计数器引脚,单片机可以执行精确的定时操作,例如延迟、频率测量和脉冲生成等。
5. 外部中断引脚外部中断引脚使单片机能够对外部事件做出快速响应。
当外部事件触发时,外部中断引脚会发送一个中断请求信号给单片机,从而打断当前处理的任务,执行中断服务程序。
6. 模拟引脚模拟引脚用于连接外部模拟电路和传感器。
通过模拟引脚,单片机可以读取外部模拟信号,并进行相应的处理和分析。
模拟引脚通常需要连接到模拟地(AGND)引脚,以确保准确的模拟信号读取。
7. 特殊功能引脚一些单片机还具有特殊功能引脚,例如复位引脚、晶体振荡器引脚和编程引脚等。
复位引脚用于将单片机复位到初始状态,晶体振荡器引脚提供时钟信号以同步单片机操作,而编程引脚用于编程和调试单片机。
总结:本文简要介绍了单片机常见的引脚功能。
单片机通过这些引脚与外部设备进行数据交互、实现定时和计数、捕获触发信号等。
C51单片机C语言程序设计

C51单片机C语言程序设计单片机C语言程序设计是指使用C语言编写程序来控制和操作单片机的工作。
单片机是一种集成电路,它包含了中央处理器、存储器、输入输出接口等功能模块,广泛应用于嵌入式系统中。
在单片机C语言程序设计中,首先需要了解C语言的基本语法和语法规则。
C语言是一种面向过程的编程语言,具有简洁、高效和可移植等特点。
接下来,要熟悉单片机的硬件结构和寄存器的使用方法,了解单片机的输入输出方式、中断、定时器等功能。
在进行单片机C语言程序设计时,需要按照以下步骤进行:1.设置寄存器和引脚的初始化:根据单片机的型号和需要的功能,设置相关的寄存器和引脚的初始化。
这些初始化可以包括引脚的输入输出模式设置、中断向量表的初始化、定时器的设定等。
2.主程序的编写:主程序是单片机的执行入口,通过主程序可以完成各种功能的实现。
在主程序中,可以定义变量、函数和结构体等。
3.中断程序的编写:中断程序是由硬件触发的,可以在需要时被调用执行。
中断程序可以包括外部中断、定时器中断等。
在编写中断程序时,需要设置相应的中断向量,并完成相应的中断服务程序。
4.函数的编写:函数是实现其中一特定功能的代码段,通过函数可以提高程序的模块化和可重用性。
需要根据实际需求编写相应的函数,并在主程序中调用。
5. 调试和测试:在编写完程序后,需要进行调试和测试。
通过调试和测试可以发现程序中的bug和错误,并进行修复。
可以通过缓慢单步调试、观察变量值和输出结果等方式进行调试和测试。
6.优化和改进:在程序完成后,可以对程序进行优化和改进。
通过优化可以提高程序的性能和效率,减少资源的占用。
可以使用编译优化选项、减少不必要的计算和内存使用等方式进行优化。
以上是单片机C语言程序设计的基本步骤和内容。
在实际操作中,还需要根据具体的需求和硬件平台进行相应的调整和编程。
通过合理的设计和编程,可以实现单片机的各种功能和应用,广泛应用于电子设备、汽车、家电等领域。
无论是初学者还是有经验的程序员,都可以通过单片机C语言程序设计来进一步提高和拓展自己的技能。
单片机C语言入门教程
单片机C语言入门教程C语言作为一种广泛应用于单片机开发领域的编程语言,在嵌入式系统中扮演着重要的角色。
本教程将帮助初学者快速入门单片机C语言编程,并详细介绍相关的基础知识和实用技巧。
一、C语言简介及环境搭建(300字)C语言是一种高级编程语言,它具有简单、灵活和强大的特点,适用于各种应用场景,尤其在单片机开发中表现出色。
在开始学习C语言之前,我们需要先搭建相应的开发环境。
首先,我们需要安装好编辑器(如Keil、CodeBlocks等)和编译器(如SDCC、IAR等),然后配置好开发板与计算机之间的通信接口,使其能够顺利进行程序的下载和调试。
二、C语言基础语法(400字)C语言的基础语法是我们学习的第一步。
在这一部分,我们将重点介绍C语言的数据类型、变量声明、运算符、控制语句和循环结构等内容。
通过深入理解这些基本语法的使用和应用,我们将能够编写出简单的C语言程序,并能够对程序的执行过程进行合理的控制和调度。
三、单片机的IO口及外设控制(500字)单片机的IO口是单片机与外部设备进行交互的重要接口,也是我们学习C语言编程的核心部分。
在这一部分,我们将详细介绍如何通过C语言编程来控制单片机的IO口,包括输入输出状态的设置、引脚模式的配置以及中断的使用等。
此外,我们还将学习如何通过C语言编写代码控制各类外设,如LED灯、数码管、蜂鸣器等。
四、C语言中的函数和指针(400字)函数和指针是C语言中非常重要的概念和特性。
在这一部分,我们将深入探讨函数的定义、调用以及参数传递的方式,还将学习如何使用指针来进行内存地址的操作和数据的存储。
通过理解和掌握函数和指针的使用方法,我们能够编写出更加模块化和可重用的C语言代码,提高程序的效率和可维护性。
五、C语言中的数组和结构体(400字)数组和结构体是C语言中用于存储和处理大量数据的常用工具。
在这一部分,我们将详细介绍如何使用C语言中的数组和结构体来存储和操作数据,包括数组的定义和初始化、多维数组的使用、结构体的定义和成员操作等。
STM32系列单片机原理及应用-C语言案例教程 第5章 STM32的模拟量接口及使用方法

第5章 STM32的A/D和D/A转换
内容提要:
5.1 概述 5.2 A/D转换接口 5.3 D/A转换接口
第5章 STM32的A/D和D/A转换
5.1 概述:
本章描述STM32单片机A/D和D/A转换器的原理、结构、控 制和相关特殊寄存器的用法,举例说明软件设计及应用实例。 介绍PWM发生器工作原理、实际应用案例和几种常见的滤波方 法。
或JEOC中断。 • DUALMOD [3:0]用于设置A/D的操作模式。
ห้องสมุดไป่ตู้ 第5章 STM32的A/D和D/A转换模块 扫描模式
第5章 STM32的A/D和D/A转换模块 A/D时钟
第5章 STM32的A/D和D/A转换模块 A/D的采样时间
最小采样时间1us(ADC时钟=14MHz,采样周期为1.5周期下得到)
第5章 STM32的A/D和D/A转换
5.2 A/D转换模块
计算机所处理的数据都是数字量,大多数的控制对 象是连续变化的模拟量,很多传感器的输出也是模拟量, 必须在模拟量和数字量之间进行转换。
将模拟信号转换成数字信号称为模/数(A/D)转换。
第5章 STM32的A/D和D/A转换
5.2.1 STM32的A/D综述
第5章 STM32的A/D和D/A转换
偏移和增益整定电路
图为一通用的模拟信号输入电路。它对模拟输入信号进行偏 移和增益处理,使输入到模拟引脚(A/D0~A/D7)的电压为0~5V, 偏移细调通过R2实现。增益范围由调整R5完成。
第5章 STM32的A/D和D/A转换
5.2.5 A/D常用函数
ADC初始化函数ADC_Init; ADC使能函数 ADC_Cmd(); ADC使能软件转换函数 ADC_SoftwareStartConvCmd; ADC 规则通道配置函数ADC_RegularChannelConfig; ADC 获取转换结果函数ADC_GetConversionValue;
c语言判断8051引脚高电平 -回复

c语言判断8051引脚高电平-回复C语言是一门广泛应用于嵌入式系统开发的编程语言,而引脚控制是嵌入式系统中常见的任务之一。
在本文中,我们将重点讨论如何使用C语言来判断8051微控制器的引脚高电平状态。
我们将一步一步地解释代码中的各个部分,并提供示例代码。
第一步:了解8051引脚控制在开始编写代码之前,我们需要了解8051微控制器的引脚控制机制。
8051微控制器通常具有多个引脚,每个引脚可以通过设置相应的寄存器来控制其输入或输出状态。
为了判断引脚的高电平状态,我们需要读取相应寄存器中存储的数据。
第二步:寄存器配置根据8051芯片型号的不同,引脚寄存器的配置可能会有所不同。
此处,我们以常见的P1端口为例,P1端口的每个引脚都有一个相应的位(bit)用于控制其输入或输出状态。
我们需要首先将相应的位配置为输入或输出。
以下是一些常见的寄存器配置操作:1. 配置为输出模式cP1 = 0x00; 将P1端口所有引脚设置为低电平以上代码将P1端口的所有引脚配置为输出模式,并将其输出低电平。
2. 配置为输入模式cP1 = 0xFF; 将P1端口所有引脚设置为高电平以上代码将P1端口的所有引脚配置为输入模式,并将其上拉到高电平。
第三步:判断引脚状态一旦我们配置好了相应的寄存器,就可以使用C语言来判断引脚的高电平状态。
8051微控制器通常提供了一种读取指定引脚状态的方法。
以P1端口的第一个引脚为例,我们可以使用以下代码来判断其高电平状态:cif (P1_0 == 1) {引脚P1.0为高电平} else {引脚P1.0为低电平}以上代码使用条件语句if来判断P1端口的第一个引脚(P1_0)是否为高电平。
如果是高电平,则执行if语句内的代码;如果是低电平,则执行else 语句内的代码。
同样地,我们可以使用类似的代码来判断其它引脚的高电平状态。
第四步:完整代码示例下面是一个完整的示例代码,演示了如何判断8051微控制器的引脚高电平状态:c#include <8051.h>void main() {P1 = 0xFF; 将P1端口所有引脚配置为输入模式,并上拉到高电平while(1) {if (P1_0 == 1) {引脚P1.0为高电平} else {引脚P1.0为低电平}}}以上代码中,我们首先配置了P1端口的所有引脚为输入模式,并通过设置寄存器将其上拉到高电平。
单片机的引脚原理图及说明

单片机的引脚原理图及说明引言:单片机(Microcontroller Unit,MCU)是一种集成了微处理器核心、存储器、输入/输出接口及其他功能模块的微型计算机系统。
在单片机中,引脚(Pin)是与外部电路连接的接口,用于输入和输出信号。
本文将详细介绍单片机引脚的原理图及说明。
一、引脚的分类单片机的引脚根据其功能可以分为输入引脚和输出引脚两类。
1. 输入引脚:输入引脚用于接收外部信号,并将其传递给单片机内部进行处理。
输入引脚通常具有以下特点:- 高电平输入:当外部信号为高电平时,输入引脚将接收到高电平信号。
- 低电平输入:当外部信号为低电平时,输入引脚将接收到低电平信号。
- 输入阻抗:输入引脚通常具有一定的输入阻抗,用于限制外部信号的电流。
2. 输出引脚:输出引脚用于将单片机内部处理后的信号输出到外部电路。
输出引脚通常具有以下特点:- 高电平输出:当单片机内部处理后的信号为高电平时,输出引脚将输出高电平信号。
- 低电平输出:当单片机内部处理后的信号为低电平时,输出引脚将输出低电平信号。
- 输出驱动能力:输出引脚通常具有一定的输出驱动能力,可以驱动外部电路的负载。
二、引脚的原理图及说明单片机的引脚在原理图中通常以引脚编号的形式表示,并配以相应的说明。
以下是常见的单片机引脚原理图及其说明:1. VCC(电源引脚):VCC引脚用于连接单片机的电源正极,通常为+5V或+3.3V电压。
它提供了单片机工作所需的电源。
2. GND(地引脚):GND引脚用于连接单片机的电源地,与VCC引脚相连,提供了单片机工作所需的电源地。
3. XTAL1/XTAL2(晶体振荡引脚):XTAL1和XTAL2引脚用于连接外部晶体振荡器,提供单片机的时钟信号。
通常,一个晶体振荡器连接到XTAL1和XTAL2引脚,以提供单片机的时钟频率。
4. RESET(复位引脚):RESET引脚用于复位单片机。
当RESET引脚被拉低时,单片机将执行复位操作,重新开始执行程序。
51单片机程序引脚定义规则

51单片机程序引脚定义规则
51单片机(通常指的是8051系列单片机)是一种非常常见的微控制器,广泛应用于各种嵌入式系统。
它的程序引脚定义规则是固定的,通常由单片机的制造商提供。
以下是一个简化的51单片机引脚定义规则:
1. P0口:通常作为低8位I/O端口使用。
在访问外部存储器时,P0口也作为低8位地址/数据总线使用。
2. P1口:通常作为8位I/O端口使用。
3. P2口:通常作为高8位地址/数据总线使用,或作为辅助I/O端口。
4. P3口:除了标准的I/O功能外,P3口还有额外的功能,如中断、串行通信等。
5. P4口:在一些扩展型的51单片机中存在,通常作为附加的I/O端口或地址总线。
6. P5口:在一些扩展型的51单片机中存在,通常作为附加的I/O端口或地址总线。
7. P6口:在一些扩展型的51单片机中存在,通常作为附加的I/O端口或地址总线。
8. P7口:在一些扩展型的51单片机中存在,通常作为附加的I/O端口或地址总线。
以上只是一种通用的描述,具体的引脚定义可能会因不同的51单片机型号而有所不同。
为了获得准确的引脚定义,你应该查阅你所使用的单片机的数据手册或参考手册。
51单片机 引脚 读 写 函数

51单片机引脚读写函数51单片机是一种常见的微控制器,它有多个引脚用于连接外部设备和执行各种功能。
在使用51单片机时,我们通常需要编写读取和写入引脚的函数来控制外部设备或与其他设备进行通信。
首先,让我们来看看如何编写一个读取引脚状态的函数。
在51单片机的编程中,我们可以使用特定的语言(比如C语言)来编写这样的函数。
一个简单的读取引脚状态的函数可能如下所示:c.int readPin(int pinNumber) {。
return P0 & (1 << pinNumber);}。
在这个函数中,我们使用了P0寄存器来读取引脚的状态。
我们通过将1左移pinNumber位来创建一个掩码,然后使用按位与操作来获取该引脚的状态。
这个函数可以根据具体的引脚编号来读取相应引脚的状态。
接下来,让我们来看看如何编写一个写入引脚状态的函数。
一个简单的写入引脚状态的函数可能如下所示:c.void writePin(int pinNumber, int value) {。
if (value == 1) {。
P0 |= (1 << pinNumber);} else {。
P0 &= ~(1 << pinNumber);}。
}。
在这个函数中,我们同样使用了P0寄存器来写入引脚的状态。
根据传入的value参数,我们使用按位或操作或按位与非操作来设置或清除相应的引脚位。
需要注意的是,以上的示例函数是针对51单片机的特定引脚操作的示例,实际使用时需要根据具体的引脚编号和端口寄存器进行相应的修改。
同时,还需要考虑到引脚的输入输出模式、上下拉电阻等其他因素。
总之,编写51单片机引脚的读写函数需要考虑到具体的引脚编号、端口寄存器的操作以及引脚的输入输出模式等因素,以确保准确可靠地控制引脚的状态。
希望这个回答能够帮助你更好地理解51单片机引脚的读写函数。
单片机引脚说明-按其引脚功能分为四部分叙述这40条引脚的功能

单片机引脚说明-按其引脚功能分为四部分叙述这40条引脚的功能下面按其引脚功能分为四部分叙述这40条引脚的功能。
1、主电源引脚VCC和VSSVCC——(40脚)接+5V电压;VSS——(20脚)接地。
2、外接晶体引脚XTAL1和XTAL2XTAL1(19脚)接外部晶体的一个引脚。
在单片机内部,它是一个反相放大器的输入端,这个放大器构成了片内振荡器。
当采用外部振荡器时,对HMOS单片机,此引脚应接地;对CHMOS单片机,此引脚作为驱动端。
XTAL2(18脚)接外晶体的另一端。
在单片机内部,接至上述振荡器的反相放大器的输出端。
采用外部振荡器时,对HMOS单片机,该引脚接外部振荡器的信号,即把外部振荡器的信号直接接到内部时钟发生器的输入端;对XHMOS,此引脚应悬浮。
3、控制或与其它电源复用引脚RST/VPD、ALE/PROG、PSEN和EA/VPP①RS T/VPD(9脚)当振荡器运行时,在此脚上出现两个机器周期的高电平将使单片机复位。
推荐在此引脚与VSS引脚之间连接一个约8.2k的下拉电阻,与VCC引脚之间连接一个约10μF的电容,以保证可靠地复位。
VCC掉电期间,此引脚可接上备用电源,以保证内部RAM的数据不丢失。
当VCC主电源下掉到低于规定的电平,而VPD在其规定的电压范围(5±0.5V)内,VPD就向内部RAM 提供备用电源。
②ALE/PROG(30脚):当访问外部存贮器时,ALE(允许地址锁存)的输出用于锁存地址的低位字节。
即使不访问外部存储器,ALE端仍以不变的频率周期性地出现正脉冲信号,此频率为振荡器频率的1/6。
因此,它可用作对外输出的时钟,或用于定时目的。
然而要注意的是,每当访问外部数据存储器时,将跳过一个ALE脉冲。
ALE端可以驱动(吸收或输出电流)8个LS型的TTL输入电路。
对于EPROM单片机(如8751),在EPROM编程期间,此引脚用于输入编程脉冲(PROG)。
③PSEN(29脚):此脚的输出是外部程序存储器的读选通信号。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第五篇用C语言操作引脚
终于可以用C了,如前所诉,ARM7编程必须在开始运行一段启动代码(startup),所谓启动代码就是先初始异常向量表,初始化外围,跳到main函数。
对于初学者,这些很复杂,不宜深究,但有大致了解一下,那么启动代码怎么写呢?还好KEIL已经为我们自动生成相应的启动代码,在选择好器件LPC2103,软件会问我们是否生成相关启动代码,我们选是,我们来简单看一下。
Startup.s
一些宏定义……
异常向量表
Vectors LDR PC,Reset_Addr
LDR PC,Undef_Addr
LDR PC,SWI_Addr
LDR PC,PAbt_Addr
LDR PC,DAbt_Addr
NOP;Reserved Vector
;LDR PC,IRQ_Addr
LDR PC,[PC,#-0x0FF0];Vector from VicVectAddr
LDR PC,FIQ_Addr
……
Reset Handler复位入口……
Setup External Memory Pins建立外部存储器引脚……
Setup External Memory Controller建立外部存储器控制……
Setup VPBDIV建立VPBDIV(VPB总线分频器)
Setup PLL建立PLL(Phase Locked Loop锁相环)
Configure and Enable PLL配置和使能PLL
Wait until PLL Locked等待PLL锁定
Switch to PLL Clock打开PLL时钟
Setup MAM建立MAM(Memory Acceleration Module存储器加速模块)
Memory Mapping存储器映射
Initialise Interrupt System初始化中断系统
Setup Stack for each mode为各个模式建立堆栈
Enter the C code进入C程序的main函数(!!!注意这一步)
User Initial Stack&Heap(这个干什么?)
END
很复杂吧,暂时不管,我们只要知道先是异常向量表,然后初始化外围,最后进入main,这就够了。
再建个新文件,保存为C文件(.C),加载到与Startup.s同一工作组下,写上代码:
#include<lpc2103.h>
int main(void)//为什么要int而不是void?
{
PINSEL0=0X00000000;//P0.0~P0.15做GPIO口用
IODIR=0XFF;//P0.0~P0.7做输入口用
IOSET=0X0F;//P0.0~P0.3输出高电平
IOCLR=0XF0;//P0.4~P0.7输出低电平
while(1);//死循环
}
DEBUG一下,现象(见下图)与上篇相同,但代码简单多了,注意lpc2103.h一定要加,不然软件根本都不知道PINSEL0、IODIR等是什么。
打开lpc2103.h看看就知道:#define PINSEL0(*((volatile unsigned long*)0xE002C000)),0xE002C000即是PINSEL0的地址。