SPEEDING UP CALL CENTER SIMULATION AND OPTIMIZATION
Date Submitted by the
Scenario-Specific Topology Reduction in Network SimulationsJournal:International Symposium on Performance Evaluation of Computerand Telecommunication SystemsManuscript ID:SPECTS-05-NTS-012.R1Topic Area:Networking and Telecommunication SystemDate Submitted by the26-May-2005Author:Complete List of Authors:Petit, Barath; Georgia Tech, College of ComputingAmmar, Mostafa; Georgia Tech, College of ComputingFujimoto, Richard; Georgia Tech, College of ComputingKeywords:scalable simulation , topology reductionScenario-Specific Topology Reduction in Network Simulations1Barath Petit(bpetit@)Mostafa Ammar(ammar@)Richard Fujimoto(fujimoto@)College of Computing,Georgia Institute of TechnologyAtlanta,GA30332USAAbstractOur current ability to perform packet-level simulations of large-scale networks is limited by factors such as processing speed and memory resources.Many approaches have been proposed to reduce the complexity of simulation models in a manner that reduces the computing resources required while preserving thefidelity of the simulation.In this paper we con-sider topology reduction as a means to reduce the resource re-quirements of network simulations.We show that it is possi-ble to reduce topologies of simulation models while preserving certain classes of metrics.We do this in the particularly chal-lenging environment where closed loop traffic(e.g.,TCP)is being simulated in the network.The reductions are scenario specific in the sense that the desired performance metrics of a network simulation experiment dictate the feasibility of partic-ular reduction methods.We use a set of experiments represent-ing simulation scenarios to demonstrate our approach.1IntroductionCurrent communication networks are extremely complex making theoretical analysis difficult or impossible.The bulk of the complexity lies in the often vast number of interacting agents including protocols,traffic sources and routers.Thus, simulation is the only recourse for the analysis of large net-works.Simulation of packet switched networks involves the modelling of every packet in the network.Packet level sim-ulation requires many events and thereby simulation of large scale networks is very resource intensive in nature.Thus,our current ability to simulate large networks is limited by fac-tors such as processing speed and memory resources.Reduc-ing simulation runtime often involves reducing the number of events to be processed.A reduction in model size of the simulation directly translates to speeding up of the execution times.Reducing the topology of the simulation would lead to a decrease in the number of hops to be traversed by a packet thereby yielding a savings in the number of packet events.Further,the memory requirements are also reduced.In[4]the authors list various methods for reducing Internet topologies with the objective of preserving the graph-theoretic properties.The methods are essentially traffic and topology independent and,thus,it is not clear that preserving graph-theoretic properties would indeed preserve the experimental outcomes of the network simula-tions.In order to demonstrate the importance of bandwidth awareness in topology reduction,we perform the following experiment.We removed some of the bottleneck links of the 1This work is supported in part by NSF under contract number ANI-0136936topology of one of our experiments(to be described in section 5)and compared the results of the simulation run of the re-duced topology with the results obtained by running the sim-ulation on the original topology.In this case the outcome of interest is the response time distributions of the webflows. As seen infigure1,the results do not match.Present approaches to reduce simulation complexity pertain to traffic reduction[1]or abstraction of the simulation model[3].However,reducing the topology to be simulated(to reduce simulation cost)while preserving the traffic properties and metrics(in the context of TCP/IP traffic)has proven to be difficult.As will be elaborated in section3,the difficulty in reducing the topology owes much to the closed-loop nature of transport protocols employed in current communication net-works.It is inherently difficult to characterize traffic from closed-loop sources since this requires prior knowledge of measures such as packet loss ratios.The difficulty further in-creases in direct proportion to the number of bottleneck links in the network.On the other hand it has been shown in[4] that it is possible to remove high capacity nodes in an ATM network,while preserving queuing behavior at the low capac-ity nodes that are retained.In this paper we show that it is possible to reduce topologies of networks when the traffic is closed-loop in na-ture with the caveat that only certain classes of metrics are preserved as a result of the reduction.Thus,the reductions are scenario-specific since the metrics to be observed dictate the feasibility of the reduction method.We define the reductions to be scenario-specific because unlike current schemes whose feasibility is determined by the traffic in the network and net-work parameters,our methods’feasibility is dictated by the scenario or more specifically the performance measures to be determined.The outline of the paper is as follows.In section2 we present related work on approaches to reduce simulation complexity.We elaborate on the model reduction framework and a classification of network simulation scenarios in section 3.We list our topology reduction methods in section4.We present the applicability of the reduction methods on three example scenarios in section5with a discussion of the results in section6.We conclude the paper with directions for future work in section7.2Related WorkCurrent approaches to reducing run-time of simulations are hinged on abstracting or reducing some aspects of the simulation.For example,recently approaches have been sug-(a)Simulation Outcome:Original Response TimeDistribution (b)Simulation Outcome:After Removal of BottlenecksFigure1:Sensitivity of Response Time Distributions to Bot-tlenecksgested to reduce simulation run-time by scaling down the traf-fic fed to the simulator while keeping the network topology untouched[1].In addition to the traffic,the network parame-ters such as link capacities and buffers are scaled by the cor-responding factor but the number of nodes in the network remains unchanged.However,SHRINK[1]does not work for DropTail schemes in certain scenarios and its behavior in scenarios where the network composition is diverse remains unclear.Similarly RSM[2]scales down only the network pa-rameters while leaving the network traffic and topology un-touched.We have also observed that while RSM[2]preserves to some extent packet-level metrics such as queuing delay and link utilization,it fails forflow level metrics.Another approach includesfluid simulations[3]that seeks to determine network characteristics by solving a set of closely coupled differential equations.Fluid simulation methods model packet transfer asfluidflows.Thus,each connection is assumed to have a certain amount offluid to be transferred across the network.Event processing is required only when thefluid transfer is initiated or terminated and intermediate events that involve change of rate offluid transfer.Thus,thefluid abstraction obviates the necessity of simulating every single packet.Thefluid approach leads to event reduction in scenarios where network topology is moderate and dynamicity of traffic is limited.However,in cases where the topology is large or the traffic is dynamic the event rate exceeds that of the packet level simulation.This is due to the fact that dynamic traffic scenarios involve frequent rate change events when the transfer rate of aflow needs to be changed to accommodate a newflow arrival/departure or buffer overflow at the links.A rate change event at a link can trigger multiple rate changes in downstream links.This problem is exacerbated in large networks.This is referred to as the’ripple’effect[3]and is one of the main limitations of fluid simulations.It is notable thatfluid simulations are not scalable with respect to heavy web traffic and are not suitable for packet-level metrics.Note that the reduction methods dis-cussed above cannot be applied to the simulation scenarios considered in this paper.More specifically,fluid simulation techniques fail to preserve packet-level measures and are prone to ripple effects(described above)in face of heavy web traffic.Similarly,as discussed above,SHRiNK does not apply in scenarios where routers employ the DropTail scheme and RSM fails forflow-level measures.3Model Reduction FrameworkA simulation experiment can be thought to be consisting of three main aspects viz.the topology,traffic and outcome.If the topology is a router-level topology then other factors such as the queuing scheme at the links come into play as well.The outcome of the experiment could be values or distributions of specific metrics or relative ordering among various metrics among others.3.1Fine and Coarse Grained MetricsDefining a metric as a measure that is a function of the traffic and topology of the simulation experiment,we could classify metrics asfine-grained or coarse-grained.Some examples offine-grained metrics are packet-level metrics in a packet switched network such as the end-end delay(per packet), queuing delay and buffer occupancy at the routers.Some ex-amples of coarse-grained metrics are:•Response time distributions of webflows in a network with long-lived TCPflows as background traffic•The distribution of response times,number of customers in servers in Content Delivery Networks(CDN),anycast delivery network scenarios.•The query response time,rate of QueryHits in a Gnutella P2P network.•Server metrics of web servers withfinite job buffers3.2Open and Closed Loop TrafficWith the aim of reducing router-level topologies,we classify metrics relative to the traffic used in the simulation experi-ment.Thus,the traffic would dictate the feasibility of re-duction methods relative to the particular metric but the de-gree of reduction would be dictated by the topology.Within the context of the Internet we classify the traffic as closed-loop(elastic)and open-loop(inelastic).Before delving fur-ther,we outline the issues involved in reducing a topology for the above two traffic classes with respect to the corresponding metrics.First we consider the open-loop traffic scenario.Prime examples are ATM networks with voice/video traffic.It is possible to characterize the traffic as a function of time for open-loop scenarios.For example,the traffic could be char-acterized by its peak rate or the envelope.It is possible to reduce these networks and still preservefine-grained metrics such as buffer overflow probability or buffer length distribu-tion.In[5]the authors demonstrate that in a network of ATM buffers fed with open-loop traffic removal of upstream nodes with high service rates leaves the queuing behavior at down-stream nodes unchanged.However,it is not possible to apply the same to a closed-loop traffic based network.For example,we con-sider now the case of closed loop traffic where the traffic is controlled by TCP-like congestion control algorithms.In these cases it is non-trivial to obtain traffic estimate with-out the prior knowledge of measures such as drop proba-bility and round trip time.Furthermore,under this regimesources modify their sending rates in response to network conditions.Thus,unlike the above case it is non-trivial to reduce the topologies while preservingfine-grained metrics such as throughput offlows,packet loss ratio and buffer oc-cupancy at the routers.3.3Simulation Scenario ClassesWith the above as background we now move on to classify simulation experiments into four main classes.The classifica-tion will be based on traffic and observable metrics assuming that we are dealing with router level topologies.•Class1scenario consists of open-loop traffic cases.As pointed out in the discussion above,it is possible to re-duce these networks while maintaining thefidelity offine-grained metrics.Thus,the range of observable metrics under topology reduction includes bothfine-grained and coarse-grained metrics(since we expect coarse-grained metrics to hold in the face offine-grained metrics’fidelity).•Class2scenario consists of networks that use closed-loop traffic and metrics to be observed arefine-grained like packet-level metrics.•Class3scenario consists of networks that use closed-loop traffic but the metrics to be observed are coarse-grained be-sides being relatively insensitive to the closed-loop nature of the system.•Class4scenario consists of networks that use a mixture of closed-loop and open-loop traffic.The observable metrics here are not only coarse-grained metrics butfine-grained metrics pertaining to the open-loop traffic as well.The classification of simulation scenarios is summarized in Table1.The classification also applies to QoS centric exper-iments.For example,if the metric of interest is an end-to-end packet delay bound determined as a function of link utiliza-tion,then assuming TCP based traffic,this experiment falls under class2scenarios.However,if the experiment pertains to evaluation of an admission control scheme based on the number offlows then this experiment will fall under class 3scenarios.Similarly if the experiment pertains to packet scheduling schemes then since packet-level detail is central to the experiment,it falls under either class1or class2sub-ject to the input traffic being TCP or open-loop.Reduction methods for class1scenarios include[5] and[6].To the best of our knowledge there are no known reduction methods covering class2,3and4scenarios.Reduction methods for class2scenarios are non-trivial.The method would have to preservefine-grained met-rics such as packet level details.One plausible approach could be thefixed point approximation approach,whereby we aim to reduce the topology while preserving the operat-ing point of the network.However,applying this approach seems non-trivial for networks with more than one bottleneck link[7].In this work,we list several methods of topology re-duction for class3and4scenarios as per the above classifi-cation.To preserve thefidelity of these metrics we reduce the topology represented by a graph G(V,E),where V is the set of all nodes of the topology and E is the set of all the links in the topology to a reduced graph G(V ,E )where|V|>|V |and|E|>|E |.Table1:Classification of network simulation experimentsTraffic Observable metricsClass1Open-loopfine-grained,coarse-grained Class2Closed-loopfine-grainedClass3Closed-loop coarse-grainedClass4Closed-loop coarse-grainedand open-loop andfine-grained(wrt open-loop traffic)4Model Reduction MethodsIn this section,we outline different methods of reducing the topology of the network.We maintain the following invari-ants while reducing the topology.•The addition of a new link in the topology should not in-duce a new bottleneck.•The total propagation delay encountered by a packet of aflow remains unchanged.Notation We use the following notation while describingthe algorithms.•Flows belonging to the same source destination pair are classified as belonging to the same class.•P(l)={S,N1,N2,...,D}is the sequence of nodes tra-versed by the class l where S,D are the source and desti-nation nodes.•C(m,n):capacity of the bidirectional link between nodesm,n•S l(N i):for any node N i∈P(l),N i=S,D we refer toN i−1as entry point of l through N i represented by S l(N i)•D l(N i):for any node N i∈P(l),N i=S,D,N i+1is referred to as the exit point of l through N i represented byD l(N i).•C n:represents the set of allflows passing through node n.•L n:for a given node n we define the set L n as L n={m:m=S l(n)∀l∈C n}•R n:for a given node n we define set R n as R n={k:k=D l(n)∀l∈C n}•I x:For each node x of the set R n for a given node n,wedefine the set I x={m: l∈C n s.t m=S l(S l(x))}.I x represents the set of nodes that haveflows coming into x through n.•M x: i∈I x C(i,n)•Throughout the reduction process,we denote the nodes thathave been removed as marked.A set of nodes,all of whose members have not been removed is referred to as being not marked.Method-1We remove a node from the topology if the out-bound capacity exceeds the inbound capacity.The network is rewired by adding the propagation delays of the removed links.The new link has its capacity as the minimum of the previous two capacities and it’s link cost(used by the routing algorithm)is the sum of the previous two link costs.Before removing node n,we verify that the existing bottlenecks for the nodes in R n,L n are unchanged.In effect,we are remov-ing links that induce negligible queuing delay.Thus,remov-ing these nodes would have minimal effect on the class3and 4scenario metrics.We remove nodes only if for allflows passing through the node,the inbound capacity is exceeded by the outbound capacity.More formally,method-1can be described by the following pseudo-code.for each n∈V doif L n,R n not marked∧L n R n=∅thenfor each x∈R n doif M x>C(n,x)thenbreakif n’s removal modifies bottlenecks of R n,L nthenbreakfor each l∈C n doC(S l(n),D l(n))=C(S l(n),n)Add propagation delaysModify link costsRemove n and all incident linksAdd newly formed linksMark n as markedMethod-2Since class3and4scenario metrics are insensi-tive to topology reductions,reduction of the capacity of new links to be added should not induce much distortion either. The reduced capacity on the other hand results in reduced number of packet events to be processed.Now let C1and C2be the inbound and outbound capacity of aflow through a node n and C2≥C1.We apply the same method as in method-1to determine if a node n is to be removed.Then wereplace the new link’s capacity by C=(11+12)−1and it’slink cost(used by the routing algorithm)is the sum of the pre-vious two link costs.This results in the new node providing the same transmission delay per packet as the previous two nodes in succession.As in method-1,the propagation delay of the new link is the sum of the delays of the links that it replaced.We apply this method as long as the new link does not induce a new bottleneck in the topology.The reduction in number of packet events is inversely proportional to capacity of the new link.Thus,since C<C1and C<C2,the method is likely to yield more reduction in terms of numbers of events to be processed.As will be seen below,the reduction in the number of events is reflected in the loss of throughput of the long-lived closed-loop traffic.More formally,method-2can be described by the following pseudo-code.for each n∈V doif L n,R n not marked∧L n R n=∅thenfor each x∈R n doif M x>C(n,x)thenbreakfor each l∈C n doC lef f=(1C(S l(n),n)+1C(n,D l(n))−1if C lef fmodifies bottlenecks of R n,L n thenbreakfor each l∈C n doC(S l(n),D l(n))=C lef fAdd propagation delaysModify link costsRemove n and all incident linksAdd newly formed linksMark n as markedWe examine the sensitivity of packet level metrics (class2scenarios)to the reduction methods described above. In a scenario where TCP long-livedflows share the network with webflows,the throughput of one of the long-lived TCP flows was observed to be1.032Mbps.After the removal of a single node(via method-2described above),a difference of13%was observed in the throughput.After a removal of another node by method-2,the difference in throughput increased to27%.This reinforces the applicability of these methods to class3and4scenarios only.4.1Reduction methodologyThe reduction methodology is illustrated infigure2.We use the ns-2simulation script to extract the topology parameters. The parser processes the script and populates the data struc-tures such as the adjacency matrix.In addition,the cost and delay matrices are also populated with the entries correspond-ing to the link costs(used by the routing algorithm)and the propagation delays of the links.These matrices,next-hop routing matrix and the traffic specification(source-destination tuples)are used by the reduction algorithm to mark edges and nodes for removal as detailed in the pseudo-code for method-1and method-2.Note that we assumeflat routing i.e.,there is no hierarchical routing.This is necessary to ensure that the reduction algorithm preserves the propagation delay of each path in the topology.PARSERextract topologyADJACENCY MATRIXCOST MATRIXDELAY MATRIXns−2scriptextract next−hop matrix NEXT−HOPMATRIXREDUCTIONMETHOD(method−1,method−2)ns−2 scriptfor reducedtopologysource−destinationtuplesFigure2:Reduction Methodology5Class3and Class4ScenariosWe elaborate on the effectiveness of the above reduction methods while dealing with class3and4scenarios.We con-sider three example scenarios noting that the metrics of inter-est are relatively insensitive to the the closed-loop nature of background traffic.The background traffic for all the scenar-ios consists of long-lived TCPflows.The scenarios are:•Scenario A:This is a class3scenario where we study the response times of web requests.•Scenario B:This is a class3scenario where we study web servers with limited job buffers.The metric of interest is the response time distributions.•Scenario C:This is a class4scenario where we consider UDP sources in a network with background TCP traffic. The metric of interest is average one-way packet delay. 5.1The TopologyWe use the GT-ITM topology generator[8]to generate a2420 node topology with3442links.We use the transit-stub model to generate the topologies.The router buffers of the links employ the DropTail policy.The propagation delay of the links were assigned uniformly in the range of10ms to50ms. The bandwidth of the links were uniformly assigned in the range of1Mbps to500Mbps.The foreground traffic consists of HTTPflows and the background traffic consists of long-lived TCPflows.The web traffic(for scenarios A and B) is generated using the webtraf module of the ns-2network simulator.The foreground traffic for scenario C consists of UDP exponential on/off sources.5.2Scenario A:Web trafficWe study a scenario,where we are interested in the response times of the web requests in a network.In order to gener-ate traffic for the experiment,1000source-destination pairs were chosen randomly.We refer to each of these source-destination pairs as aflow.The endpoints of eachflow were designated as the server and the client.The background traf-fic consists of100,000long-lived TCPflows.For eachflow, the requests for web objects is assumed to be Poisson at the rate of20per second.The size distribution for the requests is heavy-tailed with mean3packets and shape parameter1.2. Results We compare the response time distributions of original(unscaled)and reduced simulation runs by employ-ing the Kolmogorov-Smirnov test[9].The level of signifi-canceαis assumed to be0.05.While checking for the accep-tance of the null hypothesis that the empirical distributions are the same,we also observe the value of the D-statistic. Note that the D-statistic gives us the absolute maximum dif-ference in the empirical cumulative distribution functions of the samples.We list the results in Table2andfigures3and 4.The run-time results correspond to10seconds of simula-tion time.As seen from Table2,the application of the re-duction methods distortes the mean response times by0.45% (for method-1)and0.62%(for method-2).The low values of the D-statistic indicate that the response time distributions obtained from the reduced topology simulation runs match the original response time distributions.This is reflected in figures3and4,where the response time distribution obtainedby each method is superimposed against the original response time distribution.The difference in average response times of individualflows(between the original average response timeof theflow and average response time of theflow in the scaled simulation)was also observed.The empirical probability dis-tribution of the difference in average response time of eachflow for method-1is depicted infigure5.Fromfigure5,we observe that most of theflows experience a distortion of less than3%in the average response times.Table2:Scenario A:ResultsUnscaled Method-1Method-2 Mean response time(ms)1762.191754.641751.05 D-statistic N.A0.01660.0191 Simulation Run-time(secs)459003560032400 00.0050.010.0150.020.0250.030.0350.040.04501020304050607080 ProportionofflowsResponse time (50ms units)"unscaled""method-1"Figure3:Scenario A:Response time distribution-Method1 00.0050.010.0150.020.0250.030.0350.040.04501020304050607080 ProportionofflowsResponse time(50ms units)"unscaled""method-2"Figure4:Scenario A:Response time distribution-Method25.3Scenario B:Servers withfinite job queuesIn scenario A,the web servers had zero processing overhead.In this section,we consider servers which inducefinite pro-0.050.10.150.20.250.30.350.40.450.502468101214161820P r o p o r t i o n o f f l o w sRelative Difference in Avg. Response times (%)"Scenario-A"Figure 5:Scenario A:Relative Difference in Response Times cessing delay for every incoming request,the delay being de-pendant on the size of the request.This entails a job buffer at the servers.Note that this queue resides at the application level and the processing latency of the server will depend on the CPU speed of the server.We denote the processing rate of the server by C expressed in packets per second.Thus,a request of sizeb packets entails a processing time of bC secs.The size of the job buffer is denoted by B .An incom-ing request is enqueued if there is no buffer overflow.The request’s response time is the sum of the queuing time,the processing latency and the transfer latency of the web object across the network.The acceptance ratio is defined as the ra-tio N −N dNwhere N is the total number of requests which ar-rive at the servers and N d denotes the number of requests that are dropped due to buffer overflow at the job queue.Clearly factors such as B ,C and the distribution of the input arrival stream of the requests affect metrics such as distribution of response times and the acceptance ratio.As in scenario A,we pick 1000flows randomly and each flow is assigned a server and client.The background traffic consists of 100,000long-lived TCP flows.The arrival rate for the requests for the web objects was assumed to be Poisson at the rate of 20per second.The size distribution for the requests is heavy-tailed with mean 3packets and shape parameter 1.2.The values of the parameters were B =10and C =220.Results We list the results in Table 3and figures 6and 7.The run-time results correspond to 10seconds of simulation time.As seen from Table 3,the distortion induced in the av-erage response times and the acceptance ratios on the appli-cation of method-1and method-2is minimal.Similarly,the low value of the D-statistic for method-1and method-2is re-flected in figures 6and 7.The difference in average response times of individual flows (between the original average re-sponse time of the flow and average response time of the flow in the scaled simulation)was also observed.The empirical probability distribution of the difference in average response time of each flow for method-1is depicted in figure 8.From figure 8,we observe that most of the flows experience a dis-tortion of less than 3%in the average response times.Table 3:Scenario B:ResultsUnscaled Method-1Method-2Mean response time(ms)1889.651885.671881.66D-statistic N.A 0.01240.0123Acceptance Ratio 0.6040.5890.585Simulation Run-time(secs)4680032400316800.0050.010.0150.020.0250.030.0350.040.04501020304050607080P r o p o r t i o n o f f l o w sResponse time (50ms units)"unscaled""method-1"Figure 6:Scenario B:Response time distribution -Method 15.4Scenario C:UDP SourcesIn this scenario,we consider a set of UDP sources with expo-nential on-off traffic.The mean on and off times were 10ms and 90ms respectively.We observe that topology reduction applied via method 1preserves the mean one way per-packet delay.We consider two cases where the rate of each of the sources during ON time are 20Mbps and 100Mbps.The experiments included 1000ON/OFF sources with the back-ground traffic consisting of 1000long-lived TCP flows.We present results for method-1only since results for method-2were not satisfactory.0.0050.010.0150.020.0250.030.0350.040.04501020304050607080P r o p o r t i o n o f f l o w sResponse time(50ms units)"unscaled""method-2"Figure 7:Scenario B:Response time distribution -Method 2。
计算机相关日语词汇整理10
キリ番点击人数达到某一点时(如1000、5000)发出奖品。
这一点称キリ番キロkilo 千キロバイトkilobyte 千字节キロバイトデータkilobyte data 千字节数据クールサイトcool site 酷站クェッションマークquestion mark 问号クェリquery 查询,询问クエリの編集编辑查询クォートquote 引号クオリファイアqualifier 限定符クオンタイザーquantizer 量化器くくり単位总括单位クッキーcookie 网络服务器传递给浏览器的信息クボタコンプスkubota Comps 久保田公司クボタコンプス株式会社久保田株式会社クライアントclient 客户端クライアント座標客户区坐标クライアント側客户方クライアント領域客户区クラスclass 类模块クラスclass 类クラスターcluster 簇,群集クラスタ化インデックスclustering index 聚集化索引クラスドライバclass driver 类驱动程序クラスパッケージclass package 类包クラスファイルclass file 类文件クラスライブラリclass libraries 类库クラスローダキャッシュclass loader cache 类载入缓存クラス図class diagram 类图クラッカーcracker 解密高手,入侵者クラッキングcrashing 龟裂缝クラッシュcrash 崩溃グラフgraph 图表グラブgrab 抓取グラフィックgraphic 图形,绘图,图表グラフィックイコライザgraphic equalizer 图形均衡器グラフィックスgraphics 图形グラフィックス?アクセラレータgraphics accelerator 图形加速グラフィックペンgraphic pen 绘图笔グラフィックボードgraphic board 显卡グランドground 地面クランプclamp 夹子クリアclear 清空,消除グリーティングgreeting 祝贺,问候クリーニングcleaning 清除クリーニングテープcleaning tape 清洗带クリーンエネルギclean energy 无污染能源クリーンセンターclean center 清洁中心クリエィティブcreative 创造性的クリエイトcreate 创建クリエイト文create statement 创建语句クリスタルshortblock 短路块クリスタルcrystal 水晶クリスタルcrystal 晶振クリスタルレポートcrystal report 水晶报表クリックclick 点击,单击クリック?アンド?モルタルclick and mortar 鼠标加水泥クリックレートclick rate 点击率グリッドgrid 格子,隔栅グリッドサイズgridsize 格栅尺寸グリッド線网络线クリップアートclip art 剪贴画クリップボードclipboard 剪贴板クリティカブルcriticable 临界クリティカリティcriticality 危急程度クリティカルセクションcritical section 临界段,关键段グリニッジ時間Greenwich 格林威治标准时间グルーピングgrouping 分组グループgroup 组グループID 组IDグループとアウトラインの設定组及分级显示グループの解除取消编组グループボックスgruoupbox 组框グループ化grouping 分组,编组,组合グループ解除取消组合グループ内のメンバー组内成员グレイアウトgrayout 灰显グレイスケールgray scale 灰阶,灰度グレイスケール画像gray scale image 灰度图グレースケール値gray scale 灰度值グレードアップupgrade 升级グレートスケールgreat scale 灰度クレードルcradle 托架クレームclaim 赔偿,索赔クレカcredit card 信用卡クレジットcredit 信用クレジットカードcredit card 信用卡クレヨンのコンテ画Conte蜡笔クローズclose 关闭クローズclose 结束クロースケーブルcross cable 交连电缆クローズボックスclose box 关闭窗口グローバルglobal 全局的グローバルIP grobal IP 外部IPグローバルIPアドレスglobal IP address 外部IP グローバルオブジェクトglobal object 全局对象グローバル変数global variable 全程变量; 全局变量しきい値阀值,上限グローベルglobal 全局的クロスcross 交叉クロスアセンブラーcross assembler 交叉汇编程序クロスケーブルcross cable 交叉电缆クロスコンパイラーcross compiler 交叉编译程序クロスコンパイルcrosscompile 交叉编译クロストークcrosstalk 串音クロスリファレンスcross reference 互相参照クロックclock 时钟クロックアップclock up 超频クロック周波数clock frequency 时钟频率クロック信号clock signal 时钟信号クロック同期clock 时钟同期クロック同期式clock 时钟同期式クロノスターChronoStar ChronoStar文件管理工具クロムchrome 络黄ケアレスミスcareless miss 由于疏忽所造成的错误ゲインgain 放大系数,增益ケースcase 机箱,外壳ケースcase 情况ケースコードcase code 外壳代码ゲーティングアラームgating alarm 门控报警ゲートgate 水门ゲートウェイgetway 网关ゲートウェイサーバgateway server 网关服务器ゲートラインgate line 门线ケーブルcable 电缆ケーブルテレビcable television 有线电视ケーブルモデムcable modem 电缆调制解调器ゲームgame 电子游戏ゲームコントローラgame controller 游戏控制器ゲーム機game machine 游戏机ゲストブックguest book 客户书ゲッターメソッドget方法コアcore 核心,磁芯コア技術core technology 核心技术コインcoin 硬币コーディネートcoordinate 协调コーディングcoding 编写代码コーディングスタイルcoding style 编码样式コーディングモードcoding mode 编码模式コーディング規則coding rule 编码规则コードcode 代码コードウォリアーcodewarrior 代码战士コードエラーcode error 代码错误コードオーディットcode audit 代码审查コードジェネレーターcode generator 代码生成器コードセクションcord section 代码段コードセグメントcode segment 代码段コードネームcode name 编码名,代号名コーマスcommerce 商业コールcall 呼叫コール/呼び出しcall 呼叫/调用ゴールシークgoal seek 单变量求解コールセンターcall center 呼叫中心コールドはんだ接続cold solder joint 虚焊コールバックcall back 回叫コールバック関数callback function 回调函数ゴシックGothic 黑体字,粗体字ゴジック体gothic 黑体字コスト?メリットcost merit 成本优势コストダウンcost down 降低成本コストパフォーマンスcost performance 性价比コスト分析cost analysis 成本分析コタンジェントcotangent 余切コネクションconnection 结合コネクションconnection 连接コネクタconnector 插座,连接器,连接件コネクタ付き带有插座コネクティビティconnectivity 连接性コネクトconnect 连接このフォルダにあるメッセージ此文件夹中的邮件このページの検索查找(在当前页)このようです这样的このようにすると这样做この限りではない不受此限制,不在此范围之内この時点で这一时点上この時点で在现阶段上この値这个值コピーcopy 复制コピーしたレイヤー通过拷贝的图层コピーライトcopyright 版权,著作权コピー元拷贝源コピー先拷贝目的地コヘーションcohesion 内聚度コマシャールcommercial 商业的,商务的コマンドcommand 命令コマンドインタープリターcommand interpreter 命令解释程序コマンドサーチパスcommand search path 命令搜索路径コマンドシェルcommand shell 命令外壳コマンドステータスコードcommand status code 命令状态代码コマンドセットcommand set 命令集,指令集コマンドデータcommand data 命令数据コマンドプロセッサーcommand processor 命令处理程序コマンドプロンプトcommand prompt 命令提示行コマンドボタンcommand button 命令按钮コマンドメニューcommand menu 命令菜单コマンドラインcommand line 命令行コマンドラインウィンドウcommandline window 命令行窗口コマンドラインパラメータcommand line parameter 命令行参数コマンドレベルcommand level 命令级コマンドワードcommand word 命令字コマンド異常終了命令异常终了コマンド正常終了命令正常终了コマンド文语句コミットcommit 提交ゴミデータgarbage 无用数据コミニュケーションcommunication 通讯,交流,通信コミュニケーションを行う进行沟通コミュニティcommunity 共同,共同体コミュニティサイトcommunity site 共同网站ごみ焼却炉垃圾焚烧炉ごみ焼却炉向け面向垃圾焚烧炉ごみ箱trash box 回收站ゴム足gum 橡胶插脚コメントcomment 注释コメント/注釈comment 注解コメントアウトcomment out 注释掉コメント化comment 注释化コメント行comment line 注释行コメント読込读入注释コモンcommon 普通,共同コラボレーション図collaboration 协作图コラボレーティブcollaborative 协作コレクションcollection 收集コレクトcollect 收集コロンcolon 冒号コンサートconcert 音乐会コンサルconsulting 咨询コンサルconsulting 顾问コンサルタントconsultant 顾问コンサルティングconsulting 咨询コンシューマconsoler 一般用户,普通人群コンスタントconstant 常量コンストラクタconstructor 构造函数コンセプトconcept 概念,观念,思想コンセントplug socket 插座コンセンサス意见一致コンソーシアムconsortium 财团,联盟,协会コンソールConsole 操作台,控制台コンター図contour 等高线图コンテキストcontext 前后关系コンテキストcontext 上下文コンテナcontainer 容器コンテナリストcontainer list 容器列表コンデンサーcondenser 电容コンテンツcontents 内容コンテンツアドバイザcontents adviser 分级审查コントラストcontrast 对比度,反差コントローラーcontroller 管理员,控制器コントロールcontrol 控件コントロールキーcontrol key 控制键コントロールデータcontrol data 控制数据コントロールパネルcontrol panel 控制面版コントロールブロックcontrol block 控制块コントロールボックスcontents adviser 控件工具箱コンバージョンconversion 转换コンバータconverter 转换器コンバートconvert 转换コンパイラーcompiler 编译程序,编译器コンパイラージェネレータcompiler generator 编译程序生成器コンパイラー言語compiler language 编译(程序)语言コンパイルcompile 编译コンパクトディスクcommpact disk(CD) 只读光盘コンパクトフラッシュcompact flash(CF) 压缩缓存コンバセーショナルconversational 会话式コンパチビリティcompatibility 兼容性コンパティビリティーcompatibility 兼容性コンパレーターcomparator 比较器コンビニconvini conviniコンピューターcomputer 计算机コンピューターウイルスcomputer virus 计算机病毒コンピューターグラフィックスcomputer graphics 计算机图形学コンピューターシステムcomputer system 计算机系统コンピューターシミュレーション/計算機シミュレーションcomputer simulation 计算机模拟コンピューターセキュリティーcomputer security 计算机安全性コンピューターネットワークcomputer network 计算机网络コンピュータープログラムcomputer program 计算机程序コンピューターリテラシーcomputer literacy 计算机基本能力コンピューター制御computer control 计算机控制コンピュータウィルスcomputer virus 电脑病毒コンピュータテクノロジーズcomputer technologies 计算机技术コンピュータ環境computer environment 计算机环境コンピュータ名computer name 计算机名コンファレンシングconferencing 会议コンフィギュレーションconfiguration 设定.配置コンフィギュレーションファイルconfiguration files 配置文件コンフィギュレーション識別配置标识コンフィグconfig 配置コンフィグレーションconfiguration 配置コンフィネメントconfinement 监护コンプスComps 久保田公司コンプライアンス?プログラムcompliance?program compliance program コンプレッサーcompressor 压缩器コンベアconveyer 传送带コンペアマッチcompare match 比较匹配コンペアレジスターcompare register 比较寄存器コンポーネントcomponent 组件コンボデータcombodata 组合数据コンポネントモデルcomponent model 组件模型コンポネント図component chart 构件图コンボボックスcombo box 组合框コンボリューション演算convolution calculation 卷积运算コンマcomma 逗号サーチsearch 检索サーチエンジンsearch engine 搜索引擎サーチモードserch mode 搜索模式サーティフィケーションcertification 认证サーバーserver 服务器サーバー上服务器上サーバ側server 服务器端サービスパックService Pack 服务包サービスプログラムservice program 服务程序サービスプロバイダーservice provider 服务供应商サービスモードservice mode 服务模式サービスロジックservice logic 服务逻辑サービス名service name 服务名称サーフェースSurface 曲面サーブレットservlet servletサーブレットservlet Jave服务器程序サーミスタthermistor 热敏电阻器サイズsize 尺寸,大小サイズ順按大小排列サイズ変更バーの表示显示调整大小栏サイトsite 站点,网站サイドバーside bar 边缘サイトへアクセスするsite access 上网サイドペーパーデッキside paper deck 侧纸板サイトマップsite map 网络导航图,站点地图サイトリストsitelist 地址列表サイバースペースcyberspace 电脑空间サイバープロテクトcyber protection 计算机保护サイレントsilent 静音サインインsign in 登录サウンド、ビデオおよびコントローラ声音、视频和游戏控制器サウンドカードsound card 声卡サウンドとオーディオデバイス声音和音频设备サウンドの録音录制声音サウンドブラスターsound bluster 声霸卡サウンドボードsound board 声卡サスペンドsuspend 暂停サドル運搬パスsaddle saddle搬运路径サドル中綴じ針saddle中订针サドル排紙部saddle排纸部サブアイテムsub item 子项サフィックスsuffix 后缀サブウィンドウsubwindow 子窗口サブオプションsub option 子选项サブキューsub queue 子队列サブクラス化コントロールsubclass control 子类化控件サブコントロールsub control 子控件サブシステムsubsystem 子系统サブスクリプトsubscript 下标サブスレッドsub shread 副线程サブセットsubset 子集サブセンテンスsub sentence 短句サブディレクトリsubdirectory 子目录サブネットsubnet 子网,网段サブネットマスクsubnet mask 子网掩码サブパスsub path 子路经サブプログラムsub-program 子程序サブページsubpage 子页面サブミットsubmit 提交サブミットボタンsubmit button 提交按钮サブメニューsubmenu 子菜单サプライチェーンsupply chain 供应链サプライチェーンモデリングsupply chain modeling 供给链模式サプライヤsupplier 供货商,供应商サプライラインsupply chain 补给线サブルーチンsub-routine 子程序サブルーチンの呼び出しsubroutine call 子程序调用サブ関数sub function 子函数サポートsupport 支持サポートセンターsupport center 支持中心サマリーsummary 概括,摘要サムスン製Samsung 三星制サムネイルthumb nail 缩略图サムネイルアイテム缩略图项サムネイルビュー缩略图视图サムネールthumb nail 缩略图サンセリフsans serif 检测サンダーバードThunderbird 雷鸟サンプリングsampling 采样; 抽样サンプリングデータsampling data 抽样数据通信サンプリングレートsampling rate 抽样速率サンプルsample 样例サンプルデータsample data 抽样数据,样本数据サンプルファイルsample file 例子文件サンプルプログラムsample program 例子程序シークseek 查找シークエラーseek error 查找差错シークタイムseek time 查找时间シーケンサsequencer 定序器シーケンシャルsequential 连续的シーケンスsequence 序列シーケンスゼネレータseguence generator 序列生成器シーケンス化序列化シーケンス図sequence 序列图シートsheet 工作表,单元格,分页シートの移動またはコピー移动或复制工作表シートの見出しの色工作表标检颜色シートの削除删除工作表シートの保護保护工作表シームレスseamless 无缝シールドshield 屏蔽シールドコードshield code 屏蔽代码シールド線shielded line 屏蔽线シーンscene 场景シェアウェアshare ware 共享软件シェーマ画像schema image 图解图像ジェネラルレジスターgeneral rejister 通用寄存器ジェネレーターgenerator 发生器ジェネレートgenerate 产生,生成シェルshell 外壳程序シェルshell 外壳シェルスクリプトshell script 外壳脚本程序シェルプログラムshell program 外壳程序ジオメトリーレイアウトgeometry layout 几何布置しかしながら但是シグナルsignal 信号シスアドsystem administrator 系统管理员シスオペsystem operator 系统操作员システムsystem 系统システムアドミニストレーターsystem administrator 系统管理员システムイメージsystem image 系统图像システムインテグレーションsystem integration 系统集成システムエンジニアsystem engineer 系统工程师システムクラッシュsystem crash 系统崩溃システムコールsystem call 系统调用システムズ?エンジニアsystems engineer 系统工程师システムステータステーブルsystem status table 系统状态表システムセキュリティーsystem security 系统安全性システムセットアップモードsystemsetupmode 系统安装模式システムダウンsystem down 系统死机システムツールsystem tool 系统工具システムディフォルトsystem default 系统预设值システムテーブルSystem table 系统磁盘システムテストsystem test 系统测试システムデバイスsystem device 系统设备システムデフォルトsystem default 系统预设值システムのタスクsystem task 系统仸务システムの情報系统信息システムの復元系统还原システムパラメータsystem parameter 系统参数システムヒープsystem heap 系统堆システムビジーsystem busy 系统忙システムフォルダsystem folder 系统文件夹システムプラットフォームsystem platform 系统平台システムプログラムsyttem program 系统程序システムプログラムテストsystem program test 系统程序测试システムメソッドsystem method 系统方法システムモニターsystem monitor 系统监督程序システムリソースsystem resource 系统资源システム回復system recovery 系统恢复システム開発system development 系统开发システム管理system management 系统管理システム構成system configuration 系统配置システム構成図系统构成图システム再起動system restart 系统重新初启システム最適化system optimization 系统优化システム仕様system specifications 系统规格システム仕様書系统式样书システム初期化system initialization 系统初始化システム情報を表示する查看系统信息システム設計system design 系统设计システム設定ファイルsystem configuration file 系统设定文件システム保守system maintenance 系统维护システム領域system area 系统区域シスログsystem log 系统日志しっかり近寄る紧靠シナリオ脚本,方案シナリオ名scenario 脚本名シノニムsynonym 同义词シムカードSIM卡しばらく一段时间,暂时シフト?キーshift key 变换键,换挡键,移位键シミュレーションsimulation 仿真,模拟シミュレーションサービスsimulation service 模拟服务シミュレーション環境simulated work environment 模拟环境シミュレーターsimulator 模拟器シミュレートするsimulate 模拟実網(じつもう)实网ジャーナルjournal 定期刊物,杂志,航海日记,分类帐シャープsharp 锐化シャープ(強)进一步锐化シャープ(輪郭のみ)锐化边缘シャープネスsharpness 清晰度シャットダウンshutdown 关机シャッフルshuffle 无序播放シャドウshadow 阴影シャドウ(内側)shadow 内阴影ジャバアプレットJavaApplet Java小应用程序ジャバカードjavacard程序ジャバスクリプトJavaScript Java描述语言ジャバサーブレットJavaServlet Java服务器ジャバスクリプトjavascriptシャベクリンspeakkurin 一种应用程序名ジャムjam 夹纸ジャムリカバリjamrecovery 夹纸恢复ジャンパーjamper 跳线ジャンプjump 跳跃ジャンプjump 定位ジャンルgenre 类型シュレッダーshredder 碎纸机ジョイスティックjoy-stick 游戏杆ショートshort 短路ショート?アイコンshort icon 快捷图标ショート?キーshort key 快捷键ショート?メニューshort menu 快捷菜单ショートカットshort cut 快捷方式ショートカットアイコンshort-cut icon 快捷图标ショートカットキーshort-cut key 快捷键ショートカットの貼り付け粘贴快捷方式ショートカットメニューshort-cut menu 快捷菜单ショートカットをデスクトップへ桌面快捷方式ショートブロックshort block 短路块ショートメールshort mail 短信ショッピングカートshopping cart 卖东西的手推车ジョブjob 作业ジョブリストjob list 作业列表ジョブ管理job management 作业管理ジョブ制御言語job control language 作业控制语言ジョブ対象作业对象ジョブ待ち行列job queue 作业队列ジョブ名job name 作业名ジョブ優先度job priority 作业优先级ショベルカーshovel car 铲车。
NVIDIA虚拟GPU解决方案指南:石油与天然气行业说明书
QUICKLY ACCESS MASSIVE COMPUTE RESOURCES,SECURE DATA, AND ENHANCE COLLABORATIONNVIDIA VIRTUAL GPU | INDUSTRY SOLUTION GUIDE | MAR20With new oil and gas projects costing tens of billions of dollars, decisions about where to drill and how to maximize reservoir performance must be based on expensive and sensitive data generated by the most sophisticated modeling and simulation technology available.Understanding the importance of protecting these valuable datasets, oil and gas firms have increasingly focused on better management and security, typically relying on remote systems to keep data backed up in local data centers. This creates long project load- and save-times andtethers geoscientists to traditional workstations or one-to-one data center workstations. Moreover, simulating and analyzing petabytes of data can be slow when real-time access is critical to success.NVIDIA virtual GPU (vGPU) solutions help oil and gas firms overcome the challenges of processing, analyzing, and securing large datasets, as well as enable the migration of traditional workstations to the data center . With NVIDIA, firms can transform their IT infrastructure, maximize compute resources, and increase user mobility to stay agile in an intrinsically volatile industry that demands efficiency.VIRTUAL GPUs FOR GREATER PRECISION AND EFFICIENCYWith NVIDIA vGPU technology, end-user devices perform as well as traditional workstations and IT management is streamlined. Leading oil and gas firms around the globe trust NVIDIA ® Quadro ® Virtual Data Center Workstation (Quadro vDWS) software for seismic interpretation and reservoir modeling applications, while NVIDIA GRID ® software accelerates their office productivity applications and provides access anywhere, on any device.“ NVIDIA virtual GPU technology is giving our people the performance they need to do their jobs moreflexibly and effectively than ever before, and is also making it easier for us to maintain data security and overall control over our network. It’s taken us three years to get to this point, and the wait has been well worth it.”—Corey Elliot, Director of Information Technology Legacy Reserves3M ulti-GPU capabililities supported with NVIDIA Quadro vDWS software October 2018 release (aka vGPU 7.0 or later) and Red Hat Enterprise Linux 7.5 and Red Hat Virtualization 4.2 or later KVM hypervisors.Provide Remote Access to Secured DataNVIDIA virtual GPU technology allows for migration of the traditionalworkstation into the data center. Not only does this reduce project load- and save-times, it also safeguards expensive and sensitive data. Geoscientists can now access files from home, at the well site, or while traveling. And geographically dispersed teams can collaborate on files without any performance degradation, confident that data is protected and that they’re working on a single master file.Speed Time to DiscoveryWith multi-GPU support for NVIDIA Quadro vDWS, a single virtual machine can harness the power of up to four NVIDIA GPUs to boost scalability for applications requiring heavy computation resources for data visualization.³ By speeding up and reducing model processing cycle times, NVIDIA helps images become clearer and sharper , faster. Calculations of seismic trace attributes and visual analysis of complex basins can now be done in real-time, which leads to more effective lease bidding, higher service revenues, and more efficient hydrocarbon discovery and recovery.Minimize Downtime and DelaysIn the oil and gas industry, every day of production represents millions of dollars in investment. NVIDIA’s industry-proven stability for both Windows and Linux drivers provides continuous uptime to minimize delays. Plus, live migration of GPU-accelerated VMs means high system availability—IT can perform critical services like workload leveling, infrastructure resilience, and server software upgrades without end-user disruption or data loss.Maximize Compute ResourcesWith NVIDIA, teams can utilize the same pool of virtual workstationresources in shifts, ensuring seismic interpretation, reservoir modeling, and engineering tasks can all be completed around the clock with no idle resources. When additional resources are needed to power compute-intensive processes like batch calculations, users can have instant access to additional compute and graphics resources with Quadro Virtual Workstation technology in the cloud.Better Utilize the Data CenterWith live migration, data center resources are always optimally distributed to improve performance and maximize ROI. During the workday, virtual desktops run workloads like seismic interpretation to streamline system functionality and provide faster data for decision-making. After hours, the same compute resources can be dedicated to completing compute-heavy tasks like seismic processing or flow simulation.Increase Scalability and ManageabilityIT administrators can set up virtual desktops for users in geographically dispersed locations in minutes. Rapid scaling of IT resources accelerates production schedules, ensuring productivity is enhanced from Day One and ongoing costs are avoided when projects are complete. Troubleshooting and upgrades can be handled remotely.TESTED AND CERTIFIED FOR ENTERPRISE CLASS RELIABILITYNVIDIA virtual GPU solutions set the industry standard for virtualized creativity. To maximize performance—and to get the best possible experience from your IT investment—NVIDIA Quadro professional graphics solutions are tested and certified by all the leading workstation OEMs and have received ISV certifications for more than 100 professional applicationsand IT management tools. What’s more, Quadro software drivers are designed for stability and long lifespans.M10 cards supporting 87 GRID vApps users. GRID vPC for VDI starts at $6 per user per month.CUSTOMER EXAMPLESLegacy Reserves LP Midland, TexasAfter rolling out virtual desktop infrastructure (VDI), Legacy found that slow performance and rendering issues on applications like Spatial Energy Petra and ESRI ArcGIS prevented widespread user adoption. In response, Legacy’s IT team migrated users to virtualdesktops set up on servers equipped with NVIDIA’s virtual GPU technology. When users tried the new implementation, they discovered that performance rivaled the firm’s highest-end workstations. Legacy now experiences high user adoption, enhanced data security, and simplified IT management.Equinor Stavanger , NorwayOne of the largest oil and gas companies in the world, Equinor (formerly Statoil) deployed virtualized desktops to its exploration staff as part of an initiative to maximize efficiency across its business. NVIDIA graphics acceleration helped the firm migrate from blade servers to a fully virtualized infrastructure and run its most demanding subsurface and engineering applications from central server facilities. Today, exploration teams across 36 countries can collaborate on projects from anywhere, on any device, and the firm has realized a significant reduction in capital expenditures and operational costs.Ouro Preto Óleo e Gás Rio de Janeiro, BrazilWith geologists, geophysicists, cartographers, and engineers in multiple locations, Ouro Preto needed to virtualize 2D and 3D applications like Schlumberger Petrel and Halliburton Landmark to increase mobility and lower IT costs. Using NVIDIA virtual GPU technology, the firm was able to deliver graphics-intensive applications from the cloud to professionals out in the field on their computers, tablets, and even their cellphones. Ouro Preto teams now enjoy local workstation-like performance in the palm of their hands.KEY OIL & GAS USER GROUPSFor more information, visit /virtualgpu© 2020 NVIDIA Corporation. All rights reserved. NVIDIA, the NVIDIA logo, NVIDIA GRID, NVIDIA Quadro, and NVIDIA Tesla are trademarks and/or registered trademarks of NVIDIA Corporation. All company and product names are trademarks or registered trademarks of the respective owners with which they are associated. Features, pricing, availability, and specifications are all subject to change without notice. MAR20WHAT MAKES NVIDIA VIRTUAL GPUs POWERFULEXCEPTIONAL USER EXPERIENCE Superior performance, with the ability to support both compute and graphics workloads for every vGPU BEST USER DENSITYThe industry’s highest user densitysolution, with support for up to 32 virtual desktops per GPU, plus lower total cost of ownership (TCO) with up to 9 vGPUprofiles for the most flexibility to provision resources to match your users’ needs CONTINUOUS INNOVATIONRegular cadence of new software releases that ensures you stay on top of the latest features and enhancementsPREDICTABLE PERFORMANCEConsistent performance with guaranteed quality of service, whether on-premises or in the cloudOPTIMAL MANAGEMENT AND MONITORINGEnd-to-end management and monitoring that delivers real-time insight into GPU performance, as well as broad partner integrations so you can use the tools you know and loveBROADCAST ECOSYSTEM SUPPORT Support for all major hypervisors and the most extensive portfolio of professionalapps certifications with Quadro driversApps and VMsNVIDIA Compute Driver ,NVIDIA Graphics Driver, or NVIDIA Quadro Driver vGPUsNVIDIA Virtualization SoftwareNVIDIA Data Center GPU HypervisorServerHOW NVIDIA VIRTUAL GPUs WORKIn a VDI environment powered by NVIDIA virtual GPUs, NVIDIA virtual GPU software is installed at the virtualization layer , along with the hypervisor . This software creates virtual GPUs that let every virtual machine (VM) share the physical GPU installed on the server, or you can allocate multiple NVIDIA GPUs to a single VM to power more demanding workflows. The NVIDIA software includes a graphics driver for every VM. Quadro vDWS, for example, includes the powerful Quadro driver. Because work that was typically done by the CPU is offloaded to the GPU, the user has a much better experience, and demanding engineering and creative applications can now be supported in a virtualized and cloud environment.。
企业绩效管理【外文翻译】

外文文献翻译译文一、外文原文Corporate Performance ManagementAbstractTwo of the most important duties of a chief executive officer are (1)to formulate strategy and (2) to manage his company's performance。
In this article we examine the second of these tasks and discuss how corporate performance should be modeled and managed. We begin by considering the environment in which a company operates, which includes, besides outside stakeholders, the industry it belongs and the market it supplies,and then proceed to explain how the functioning of a company can be understood by an examination of its business, operational and performance management models. Next we describe the structure recommended by the authors for a corporate planning, control and evaluation system, the most important part of a corporate performance management system. The core component of the planning system is the corporate performance evaluation model,the structure of which is mapped into the planning system’s database, simulation models and budgeting too ls’ structures,and also used to shape information contained in the system’s products, besides being the nucleus of the language used by the system's agents to talk about corporate performance. The ontology of planning, the guiding principles of corporate planning and the history of "MADE”,the corporate performance management system discussed in this article,are reviewed next, before we proceed to discuss in detail the structural components of the corporate planning and control system introduced before. We conclude the article by listing the main steps which should be followed when implementing a performance planning, control and evaluation system for a company.1.IntroductionTwo of the most important corporate tasks for which a chief executive officer is primarily responsible are (1)to formulate strategy and (2)to manage thecompany’s performance. In this article we examine the second of these tasks and discuss how corporate performance should be modeled and managed。
航空维修专业英语汇编

航空维修专业英语汇编南方航空公司机务工程部沈阳飞机维修基地编者说明为帮助维修人员尽快提高专业英文水平,我们在以前版本的基础上修订出版《航空维修专业英语汇编》。
希望大家能通过本手册熟悉航空维修专业英语词汇和句式,能够阅读并正确理解各种原文技术资料,为高质量完成维修工作打好基础。
本手册的对象是已经具有一定的英语基础(约2,000公共英语词汇和相应的语法知识)的机务维修人员。
在本手册编写过程中得到各部门的热情帮助和大力支持,在此谨表衷心感谢!由于时间仓促,水平有限,本手册肯定有不少缺点和不足,欢迎使用者提出宝贵意见和建议。
编者2009/1/20目录一、维修工作常用词汇 (1)1、组织机构及职能 (1)2、按ATA章节划分的基础词汇 (7)3、其它专业词汇 (16)二、维修工作常用缩写 (51)三、维修工作常见单句 (60)附录ATA章节英汉对照 (104)一、维修工作常用词汇1 ORGANIZATION & FUNCTION组织机构及职能CSN 南航股份公司Maintenance & Engineering Div. 机务工程部Shenyang Aircraft Maintenance &Overhaul Base沈阳维修基地Line Maintenance Dept.Production Plan Sect.Technical Support Sect.General Affairs Sect.Quality Control Sect.Airbus ShopTransit ShopMD ShopPre-flight CheckPost-flight CheckTransit CheckTrouble ShootingFault Isolation 航线部生产室技术支援室综合办公室质控室空客车间过站车间麦道车间航前检查航后检查过站检查排故故障隔离Heavy Maintenance Dept.(Overhaul Dept.)Quality Control Sect.Inspection Sect.Production & Planning Sect.General OfficeSystem Shop 大修部质控科检验科生产计划科办公室系统车间Engine ShopCabin Refurbishment Shop Structure & Machining Shop APU ShopScheduled ChecksA checkC checkFH (Flight Hours)FC (Flight Cycles)LandingsCalendar DateD check (4C check, 6Y Check)SeatEmergencyInteriorCleaningGalley & Lavatory (toilet) Engine (APU)CompositePaintingSheet Metal 发动机车间客舱整新车间结构机加车间APU车间定检A 检C 检飞行小时数飞行循环数起落数日历时间D 检(4C检,6年检)座椅应急设备内饰清洁厨房&厕所发动机(APU) 复合材料喷漆钣金Component Repair Dept.General Affairs Sect.Production Sect.Quality Control Sect.Joint Venture MarketingJV FAA Sect.JV Planning Sect. 附件修理部综合业务科生产科质控科合资市场科合资FAA室合资企划室Electro-Mechanical Shop Avionic ShopLanding Gear ShopPMA (Part Manufacture Approval) FactoryPreliminary InspectionVisual CheckPre-testTrouble RecordDisassemblyInspectionOverhaulRepairReplaceOn ConditionCleaningAssemblyFunctional TestFinal InspectionRelease To ServiceSRU (Shop Replaceable Unit)机电车间电子车间起落架车间航空器材厂预先检查目视检查预测试故障记录分解检查大修修理更换视情清洗组装功能测试最终检验放行内场可更换件Production Support Dept.FacilityEquipmentToolSpecial VehicleGround Power CartPneumatic Power CartTowing Vehicle 生产支援部设施设备工具特种车辆地面电源车气源车拖车De-Icing Cart(Defroster) Flat Roof Type LifterScissors Type LifterCraneTwo-Sets Hydraulic Pressure Vehicle 除冰车高空升降平台车剪式升降车吊车双系统液压源车Material Management Dept.MaterialExpendable MaterialFilterSealO-RingConsumable MaterialLubricantPaintAdhesiveSealantSparesLRU (Line Replaceable Unit)InstallationAssemblyComponentUnitPart 航材管理部航材一次性航材滤芯封圈O形封圈消耗性航材润滑剂油漆粘接胶封严胶备件航线可更换件总成组件部件单元零件Technical Management Div.Technical SupportEngineering ManagementSB (Service Bulletin) 技术管理处技术支援工程管理服务通告AD( Airworthiness Directive) CADFADEASA ADEO (Engineering Order)Job CardScheduled Job CardUn-scheduled Job Card Technical DataTechnical libraryAMM(Aircraft Maint. Manual)TSM (Trouble Shooting Manual) IPC (Illustrated Parts Catalogue)CMM (Component Maint. Manual)AWM(Aircraft Wiring Manual)SPM(Standard Practices Manual)Maintenance ProgramMRB (Maint. Review Board)MPD (Maint. Program Document)MRS (Maint. Requirement System)适航指令中国适航指令美国适航指令欧洲适航指令工程指令工卡定检工卡非例行工卡技术数据资料室飞机维修手册排故手册图解零件目录部件维修手册飞机电路手册标准工艺手册维修方案维修审查委员会报告维修大纲维修计划Production & Marketing Management Div.Contract ManagementProduction PlanningMarketingMTOP (Maintenance Task 生产经营处合同管理生产计划市场维修任务操作Operation Program)MCC(Maintenance Control Center) 方案维修控制中心Quality Management Div.Airworthiness managementAirworthyFlight SafetyInspectionInspectorCalibration CenterReliability 质量管理处适航管理适航飞行安全检验检验员计量中心可靠性Financial Div. 财务处Human Resource Div. 人力资源处General Office 办公室2 按ATA章节划分的常用词汇21 Air Conditioning 空调Distribution Pressurization Control Air Cooling Temperature Control ValveDuctPipePacksMixerOutflow ValveSafety Valve 分配压力控制空气冷却温度控制活门管道管路空调组件混合器放气活门保险活门22 Auto Flight 自动飞行Long TermFlight PlanEnvelopLateralShort TermFL Flight LevelPressure AltitudeHeightHeadingFlight Path ComputersServo MotorsFlight Augmentation Yaw DamperRudder Travel Limiting 长途飞行计划包线横向短途飞行高度层气压高度离地高度航向航迹计算机伺服马达飞行增稳偏航阻尼方向舵行程限制23 Communication 通讯External Communication HFVHFTransmitterReceiverTransceiverAntennaInternal Communication Interphone Passenger Address MicrophoneHeadsetHandphone 外部通讯高频甚高频发射机接收机收发机天线内部通讯内话旅客广播麦克风耳麦手持话筒24 Electrical Power 电源SourceEngine GeneratorAPU Generator BatteryExternal Power Cart VSCFCSDIDGAC BusDC BusEssential Bus Emergency Bus Switches 来源发动机发电机APU发电机电瓶外接电源车变速恒频恒速整体驱动电机交流汇流条直流汇流条主汇流条应急汇流条电门26 Fire Protection 防火Smoke DetectorFire LoopFire BottleAgentPortable Extinguisher Squib 烟雾探测器防火环路灭火瓶灭火剂便携式灭火瓶爆炸帽27 Flight Controls 飞行操纵Primary ControlsRudder (Yaw)Elevator ( Trimmable Horizontal Stabilizer) (Pitch)Aileron (Roll)Control TabsSecondary ControlsFlapSlatSpoilerGround SpoilerFlight Spoiler (Speed Brake) 主操纵方向舵 (偏航)升降舵(可配平水平安定面)(俯仰)副翼(横滚)操纵片副操纵襟翼缝翼扰流板地面扰流板飞行扰流板(减速板)28 Fuel 燃油TanksMain Tank Center Tank Trim Tank Electrical Pump油箱主油箱中央油箱配平油箱电动泵BoosterValvePipe ConnectorHeat Exchanger 增压泵活门管路管接头热交换器29 Hydraulic System 液压系统MotorsConnectorsHydraulic Fluid PressureBlue SystemYellow SystemGreen SystemEngine Driven Pumps CylinderActuatorPiston 马达管接头液压油压力兰系统黄系统绿系统发动机驱动泵作动筒作动器活塞30 Ice And Rain Protection 防冰防雨Hot AirWing Leading EdgeEngine Inlet Electrical Heating ProbesCockpit Windows Rain Repellent 热空气大翼前缘发动机进气道电加温探头驾驶舱窗排雨剂31 Indications & Recording 指示/记录PFD Primary Flight Display 主飞行显示屏Speed (Mach)HeadingAttitudeFlight ModeGlide SlopeLocalizerND Navigation DisplayNavigation InformationWaypointAir RouteFlight PlanNavigation AidsIndicator (Indication) Annunciator (Annunciation) LegendDisplayFlowbarWarning (Red)Caution (Amber)Advisory (Green)Local Indications Centralized Indication ECAM (Electronic Centralized Aircraft Monitor)HornChimeSingle ChimeRepetitive ChimesBlack BoxCVR Cockpit Voice Recorder速度(马赫数)航向姿态飞行模式下滑道航道导航显示屏导航信息航路点航路飞行计划导航台指示器(指示)通告灯(通告牌)指示符,指示灯显示,显示器示流条警告(红色)警戒(琥珀色)提示(绿色)局部指示集成指示飞机电子集成监控器喇叭谐音单谐音多谐音黑匣子(橙色)驾驶舱语音记CDR Cockpit Data Recorder 录器驾驶舱数据记录器32 Landing Gears 起落架Nose GearMain GearsTail GearWheelWheel-WellBrakesStrutExtend/Retract System Up-LockDown-Lock 前起落架主起落架尾橇机轮轮舱刹车支柱放轮/收轮系统上位锁下位锁33 Lights 灯光Internal Lights Dome Light Flood Light Reading Light Exit LightConsole Lighting External Light StrobeLandingTaxiLocationLogoAnti-Collision 内部灯光圆顶灯泛光灯阅读灯应急出口灯操纵台照明外部灯光频闪灯着陆灯滑行灯位置灯标识灯防撞灯34 Navigation 导航Air DataTAT Total Air Temp.SAT Static Air Temp.ProbesSensorsCompassGyroGPS Global Position SystemMCDU Multiple Control Display UnitPilot Inserted DataWeather RadarTCAS Traffic Collision Avoidance SystemGPWS Ground Proximity Warning System 大气数据全空温静空温探头传感器罗盘陀螺全球定位系统多功能控制显示组件驾驶员输入数据气象雷达防撞系统近地警告系统35 Oxygen 氧气Oxygen Mask Oxygen Generator Cylinder 氧气面罩氧气发生器气瓶36 Pneumatic System 气动系统Air ConditioningCabin PressureWing & Engine Anti-Icing Hydraulic Tank Pressurization 空调客舱增压大翼及发动机防冰液压油箱增压Ducts Pipes 管道管路38 Water/Waste 水/废水Potable Tank Waste Tank Disinfector 饮用水箱废水箱消毒剂50-60 Structure 50-60 结构FuselageFlight Deck (Cockpit) CabinSeatBaggage BayDoorsWindowsExitsSlidesCargo CompartmentForwardMiddleBulkWings (Sweep-Back ) Vertical Stabilizer 机身驾驶舱客舱座椅行李架舱门窗紧急出口滑梯货舱前中散装大翼(后掠式)垂直安定面49,70-80, Power Plant 动力装置EngineThrust/Reversed Thrust Electrical Power Pneumatic 发动机推力/反推力电源气源Hydraulic PowerFanLP CompressorHP CompressorDiffuser/CombustorHP TurbineLP TurbineAccessory Drive Gearbox BearingEngine Driven PumpIDG Integrated Drive Generator FuelFuel Metering Unit (FMU)Fuel PumpFCOC (Fuel Cooled Oil Cooler)Fuel FilterFuel Flow MeterIgnition ExciterThrottleFuel Shut-Off ValveStarterOilLubricantGreaseAPU液压源风扇低压压气机高压压气机扩压器/燃烧室高压涡轮低压涡轮附件驱动齿轮箱轴承发动机驱动泵整体驱动发电机燃油燃调组件燃油泵燃油制冷滑油冷却器燃油油滤燃油流量表点火激励器油门燃油关断活门起动机滑油润滑剂滑脂辅助动力装置3. 其它专业词汇Clear动词:1 清除 Clear the dust from the surface.2 允许 Clear to taxi.形容词1 无障碍Make sure that the travel ranges of the flight control surfaces are clear before youpressurize/depressurize a hydraulic system.在对液压系统增压/释压前,确保飞行操纵面行程范围内无障碍。
Customer-Relationship-Manageme
e-Business Application Architecture
Supply Chain Mgmt
Selling Chain Mgmt
Customer Database
Data Mining
Cross-selling Better Target Marketing Market Research
Increased ARPU Cost reductions More targeted communications New customer insights Early warning system
Source: Dowling (2002)
The Eight Building Blocks of CRM
8. CRM Metrics
3. Valued Customer
Experience
4. Organizational
Collaboration
1. CRM Vision
2. CRM Strategy
5. CRM Processes
7. CRM Technology
6. CRM Information
Consistency across channels Employee empowerment and compensation Employee skills/training Cross-functional roles Involvement of partners Minimal transfers Link to value proposition
外卖O2O平台双边顾客满意度提升策略研究文献综述
文献综述报告班级:12工商(2)班学号:姓名:一、引言随着电子商务的迅速发展,通过外卖O2O平台订餐逐渐成为订餐主流。
在近几年的发展中,逐渐出现了以美团外卖、饿了么、百度外卖为三大巨头的外卖O2O平台。
由于目前的外卖O2O平台在定位、功能、竞争手段及用户体验上同质化程度高,所以用户与外卖平台建立稳定的合作关系与形成忠诚的重点在于外卖配送服务过程。
因此本研究着重对消费者所关心的外卖配送服务阶段的满意度进行研究,比较符合实际情况,也更具有现实意义。
本研究从顾客对整个服务过程的感知角度,对外卖服务满意度的影响因素展开深入研究,在现今激烈的外卖O2O服务市场竞争环境下,将美国顾客满意指数( American Customer Satisfaction Index,ACSI)模型应用到外卖O2O服务方向研究上,建构我国当前外卖O2O平台服务的顾客满意度评价指标体系。
为外卖平台与线下参与商家提出具有实践性和针对性的服务评价模型,并且对其提高竞争能力提供一定的参考价值。
二、顾客满意度概念及研究(一)顾客满意度概念客户满意度是一个相对化的理念,它是指客户理想中的期望值与最终现实收获值之间的相互匹配程度,是客户在经历了无数次的购买活动中慢慢累积起来的一种相对连续性的状态,也是种经历了较长时间的沉淀所形成的情感诉求。
客户在将他们对特定产品或者是特定服务的能够感知到的效果与他们所希望的期望值进行相应对比之后,所造成的或开心或沮丧的感情状态就是客户满意度。
(二)国内研究综述早在十九世纪五十年代,管理学大师彼得·德鲁克(Peter Druker)曾指出,“企业的主要任务,利润并不是最重要的事情,而应当创造顾客满意,这是因为只有在顾客满意之后我们才能获得利润作为一种回馈。
”[2]由此得知,在企业经营管理的理念中,顾客满意策略已经存在,只不过在之前其重要性排在后面而已。
[1][3]雷飞飞(2017)总结出“客户满意度的诸多影响因素,主要包括产品和业务的设计、员工服务态度和服务水平、外卖O2O品牌和形象、配套服务设施等”。
应急响应计划中英文EmergencyResponsePlan
Site Safety Practice现场安全规定for Emergency Response Plan 紧急事件响应计划INDEX目录1 PURPOSE目的2 SCOPE范围3 LEVELS OF RESPONSE响应等级4 ACTIONS / REQUIREMENTS行动4.1 GENERAL通则4.2 RESPONSE TO EMERGENCIES对紧急(事件)的响应5 EMERGENCIES紧急事件5.1 FIRE火灾5.2 VEHICLE ACCIDENTS交通事故5.3 WEATHER EMERGENCIES气候方面的紧急事件5.4 ENVIRONMENTAL RELEASE/RESPONSE ACTIONS环境性释放5.5 SECURITY INCIDENTS安保事故6 SITE EVACUATIONS现场疏散7 TRAINING / RESPONSE DRILLS培训/应急演习8 TELEPHONE NUMBERS应急电话号码APPENDICES附录Appendix 1 EMERGENCY RESPONSE CHECKLIST附录1 应急响应审核单1. PURPOSE目的The purpose of this procedure is to provide a safe system of work by the implementation of emergency response measures and to identify the responsibilities and legal requirements at worksites where Project has the prevailing influence.本程序的目的是通过执行应急反映措施为工作提供一个安全体系,明确在项目工地的责任和法律规定。
2. SCOPE范围2.1 This procedure describes the actions to be taken by key personnel in the event of an emergency situation arising on Project Site and offsite constructionactivities associated with this project.本程序说明在项目现场及与项目有关的场外施工活动中出现紧急状况时,关键人员可以采用的措施(行动)。
RT-Lab实时仿真器

基于RT-LAB技术的电力系统与电力电子实时仿真RT-LAB是专业的电力电子实时仿真平台(专业实时化软件+仿真器硬件),在逆变并网(包括LVRT)、MMC、HVDC、FACTS等研究领域有ABB、艾默生等专业用户,以及大量著名院校。
RT-LAB基于Matlab/Simulink模型的实时仿真工具,硬件基于PC及多核分布式并行运算。
业界唯一支持Matlab/Simulink中SimPowerSystems模块的实时化技术加上强大的计算能力,RT-LAB让使用者更快更好的建立起电力和电力电子实时模型。
RT-Lab在电力电子领域,清华、上交大等院校、中科院电工所、南瑞、许继等企业和研究所都在使用RT-LAB做电力电子研究工作。
作为高性能的、开放的实时计算机仿真平台,iHawk即可以利用其自身的强大的调试工具直接开发仿真软件,也可以作为MATLAB等建模工具软件进行实时仿真的目标机来承担关键的核心主机、以及各分系统计算机的仿真任务。
RT-Lab可以让设计者将基于MATLAB Simulink?以及MATRIXX SystemBuild?等图形化建模工具所搭建的动力学系统和数学模型,在美国并行计算机公司的iHawk多处理器实时仿真平台上运行,从而方便的实现复杂仿真、快速原型,以及硬件在回路中的试验工作。
RT-Lab采用开放的体系结构,可以与Simulink?以及SystemBuild?等工具进行无缝连接,通过上位机和多处理器目标机的模式,将上位机用图形化工具建立好的模型拆分并下装到iHawk目标机平台上实时并行运行,并可通过Windows窗口对目标机的整个运行过程进行实时监控。
整个过程即免去了费时的手工代码编程和系统设置工作,又充分利用了目标机上的所有实时特性,生成紧凑而高效的实时运行代码,真正做到了高效自动的一体化运行。
此外,RT-LAB还可以与Labview?,Altia?,以及VBVC++等编程语言协同工作。
Philips 芬尼斯 放射性辐射治疗设备用户说明说明书

Radiation OncologyRadiation OncologyOrchestratorStreamlining and accelerating radiation oncology workflowsPhysician intentSimulation Contouring ContourapprovalPlanning PlanningreviewphysicsMDapprovalPhysicschecksWork - value added Wait - no value UncertaintyImageregistrationSimplifying complexradiotherapy workflowsThe fragmented and labor-intensive process of navigating the radiotherapytreatment process is a challenge for every oncology professional.From patient referral to treatment, workflows can be complex andinefficient, stealing precious time from you and your patient. Manual steps,divergent systems, unique users and limited integration can make it difficultto provide accurate and timely treatment.At Philips we understand your desire to inspire change – to drive efficiency andultimately enhance the quality of care. Our goal, as a partner, is to streamlineworkflows and help you maintain consistency of practice, so your teamfunctions more effectively, yet never loses sight of what’s best for the patient.A vehicle for changePhilips Radiation Oncology Orchestrator is an intelligentpatient management solution designed to streamlineand accelerate radiation oncology workflows by helpingto manage complexity, improve efficiency and enableoperational excellence.By simplifying and shortening the process, more time canbe devoted to the patient and individual attention paid todeveloping more personalized treatments in the ongoingsearch for better outcomes.• Manage complexity• Improve efficiency• Enable operational excellenceI n addition to decreasing the patients’ time to treatment, patients will also benefit when we as clinicians can consistently treat every patient to the highest quality levels.”Building bridges,connecting workflowsRadiotherapy workflows are multi-faceted with a sequence of differing tasks, each to be completed by a particular specialist. Radiation Oncology Orchestrator builds bridges between these tasks and IT systems to orchestrate the interplay between people, applications and processes. Intuitive dashboards deliver relevant information to everyone’s fingertips with direct access to external applications and a deep integration with hospital IT.Philips IntelliSpace Radiation Oncology is:Radiation Oncology Orchestrator work owProtocol-driven and highly customizabePhysicianintent User-based WorklistConnected applicationsDepartmental trackerAutomatic sign-onPatient-speci c TasksHospital IT integration HIS/EMR/OISSimulation Contouring Planning Planning reviewChecklist TreatmentManage complexityRadiation Oncology Orchestrator helps to minimize workflow interruptions by applying standardized (yet customizable) processes and transparent communications to create a harmonized way of working.Consistent, protocol-driven workflowsRadiation Oncology Orchestrator automates and streamlines your patient management workflows to help reduce your workload. It promotes a consistency of practice bydecreasing inter-operator variability for a more harmonized way of working. Each clinical pathway is defined in detail using a ProtocolCard – this includes all tasks, users, and applications. ProtocolCards are fully customizable and adaptable to fit the needs of individual patients.Comprehensive overview of tasks and prioritiesIntuitive dashboards provide a comprehensive overview of both individual tasks as well as departmental workload and capacity. The Worklist and Departmental tracker are based on task urgency and start of treatment deadlines, with clear prioritization. Every team member can spend their time wisely, addressing the most relevant tasks first. The result – fewer delays and a more streamlined workflow.Guidance through the radiation oncology processAll patient-specific task information is presented on task pages in one place and in proper context. You see tasks previously completed by others, any changes to the default protocol, safety warnings, and notes. With a paperless workflow and transparent communications, you can focus more clearly on the task to be completed. Less time is wasted looking for information.Cross-functional communicationCommunication throughout the process is key to an optimal outcome. Radiotherapy workflows involve a significantamount of information exchange between different users. It is critical that no information be lost and that it be transferred to the right persons, promoting a smooth workflow without delays or unnecessary rework. The Shared notes feature is integrated into every step of the process, streamlining the ability to share insights and rationale for patient-specific requirements or any protocol deviations.Departmental tracker – comprehensive overview of departmental workload and capacityA ProtocolCard is capturing physician intent and workflow tasks, from imaging to treatment. Each ProtocolCard is fully customizable to be in line with the department’s processes and adaptable to the individual patient.Shared notesTarget contouringIndexing of positioning devices Scan borders and tumour location for CT simulationComprehensive overview of taks and priorities with intuitive dashboardsExamples of different protocol-based Task pages with information on patient specific tasksUser-based Worklist – detailed overview of tasks at handSingle access point to your preferred applications Radiation Oncology Orchestrator allows for seamless integration with virtually all relevant applications in the radiation oncology environment. Designed as a multi-vendor positive solution it uses open standards to fit your existing workflows, applications, and IT infrastructure. You have a single-point of access to navigate easily between your preferred applications. And as login is browser based, you can access the information you need from virtually any location – via a workstation or tablet. This allows you to conduct tasks when and where needed, helping you to work efficiently and flexibly.Save time and clicksWith a single point of access, fewer authentications and passwords are required, speeding direct access to allconnected applications. Automated data routing between Radiation Oncology Orchestrator and connected systems (including treatment planning systems, simulators,contouring, and QA software) saves time and clicks, and reduces workload.The right information at the right timeThrough HL7 connectivity with HIS, EMR, and OIS, relevant patient information and demographics are automatically captured, consolidated, and presented, facilitating ease of information exchange.Radiation Oncology Orchestrator integrates with selected applications by offering functionality such as context-sensitive launch and seamless data exchange formaintaining data integrity and automating workflows. A simple push of a button brings you to the connected application and correct patient file with appropriateinformation necessary to continue the specific task at hand. Effective IT managementRadiation Oncology Orchestrator is powered by Philips HealthSuite on Premises (HSOP). This consolidated Radiation Oncology IT platform supports clinicalapplications based on industry standards for virtualization, interoperability, and security.Enable operational excellenceRadiation Oncology Orchestrator helps to apply thorough quality control and ensure traceability of data by mitigating risks and documentation of complete patient treatment data.Exceptional quality controlBuilt-in control measures alert the user about unusual or risk related parameters and deviations from the default protocol. Manual review option gives the user the ability to reject tasks, taking the workflow back to any previous task for correction. At the end of the workflow there is a mandatory checklist that is to be completed before the treatment can be started.Traceable patient historyRadiation Oncology Orchestrator allows you to maintain the highest standard in patient history management. Every action and detail is carefully tracked, including protocoldeviations and tasks completed. This helps to satisfy quality requirements by collecting a record of all information related to a patient’s treatment. Easy traceability and audit of off-protocol practice is possible in the event of questions.Radiation Oncology Orchestrator helps to reduce multiple logins, eliminate repetitive efforts, and lessen data inconsistencies by deeply integrating applications, automating workflows, and maintaining data integrity.Improve efficiencyYou have great flexibility to customize Radiation Oncology Orchestrator - from the overall care pathway design, down to the specific views and level of information shown in the dashboard and individual task pages. Each delivery of Radiation Oncology Orchestrator includes a comprehensive set of Practice Management services. Philips experts work with you tothoroughly map your clinical pathways and to configure the ProtocolCards to meet your specific departmental requirements. And integral training assures staff proficiency.Customization and configuration with integral Practice Management supportThe Radiation Oncology Orchestrator automation is going to be brilliant. But technology isn’t the onlyanswer. We are experiencing that the combination with Practice Management consultancy can truly streamline the radiotherapy workflow and allow us to improve clinical outcomes.”Dr. Russell Banner, Consultant clinical oncologist, The South West Wales Cancer CentreHigh level Workflow mappingProtocolCard development Product implementationHands on educationPractice Management modules as part of each delivery of Radiation Oncology OrchestratorRadiation Oncology Orchestrator is designed to help you keep pace with the dynamic environment and changing conditions of today’s radiotherapy treatment processes. This scalable solution is positioned to grow and evolve with your ambitions, adding new functionality and new applications for a higher level of automation.With Radiation Oncology Orchestrator you can drive operational excellence by mitigating risk, documenting results, and discovering actionable insights for efficient and effective radiotherapy treatment delivery today and into the future.Ready for the futureR adiation Oncology Orchestrator looks at the workflow process from consent to treatment to actually delivering the first fraction. The ultimate goal is to try to automate and streamline the process as much as you**********************。
Research Interests

Yaxin Liu Mail:6636W.Willam Cannon DriveApartment824Austin,TX78735Email:yxliu@Phone:512-471-9709(O)512-731-3140(M)Fax:512-471-8885Homepage:/∼yxliuResearch Interests:My research interests are in the area of artificial intelligence and intelligent systems.My thesis work focuses on decision-theoretic planning under risk-sensitive planning objectives using MDPs and Utility Theory.My long-term research goal is to provide foundations for building autonomous agents that are able to act intelligently and provide valuable services to people in a complex environment involving uncertainty while taking into account preference structures of their human users.The related subareas of research include planning under uncertainty,deterministic planning,reinforcement learning,reasoning under uncertainty,search,decision theory,game theory,auctions and e-commerce,and optimization.Education:Georgia Institute of Technology College of Computing,Atlanta,Georgia.Ph.D.in Computer Science,May,2005.Dissertation:Decision-Theoretic Planning under Risk-Sensitive Planning Objectives.Advisor:Sven Koenig.Minor:Industrial and Systems Engineering(ISyE).Georgia Institute of Technology College of Computing,Atlanta,Georgia.M.S.in Computer Science,June,1999.Peking University Department of Computer Science and Technology,Beijing,China.M.S.in Computer Science,July,1997.Peking University Department of Computer Science and Technology,Beijing,China.B.S.in Computer Science,July,1994.Research and Working Experience:10/04—present Department of Computer Sciences,The University of Texas,Austin,TX.Research Scientist III.Researched behavior transfer in reinforcement learning and robotics.09/97—09/04College of Computing,Georgia Institute of Technology,Atlanta,GA.Graduate Research and Teaching Assistant.Researched planning under uncertainty with realistic planning objectives,such as risk attitudes,multiple objectives,and extended goals.Also researched incremental search and its application in symbolic planning,as well as agent-centered search and empirical evaluations.05/01—08/01IBM T.J.Watson Research Center,Yorktown Heights,NY.Summer Intern.Researched autonomous trading strategies in an e-marketplace for B2B applications,including automatic generation of quotes and promotions.05/00—08/00IBM T.J.Watson Research Center,Yorktown Heights,NY.Summer Intern.Researched bidding strategies for risk-sensitive agents,and their integration into supply chain management systems.Built a prototype to demonstrate the ideas.03/96—09/96Department of Applied Mathematics and Computer Science,Gent University,Belgium.Visiting Researcher.Researched fuzzy logic and fuzzy quantifiers.09/94—12/96Map Engine Software Company,Inc.Beijing,China.Part-time Software Analyst,Programmer,Consultant.Developed Windows-based Geographical Information System(GIS).Designed the system prototype and implemented the kernel system.The system based on this design won the Best Software Award in Chinese3rd PC Software Competition in1997.02/92—09/94Department of Computer Science and Technology,Peking University.Research Assistant.Worked on Geographic Information Systems(GIS)under the GeoUnion project,thefirst GIS developed in China.Responsible for datafile conversion utilities and some map editing functions. Honors:•IBM PhD Fellowship,2003-2004.•IBM PhD Fellowship,2002-2003.•Outstanding Graduate Research Assistant,College of Computing,Georgia Institute of Technology,2002.•Founder Scholarship,Peking University,1995.•Outstanding Student Fellowship with the title“Star of Campus”,Peking University,1993.•Guang-Hua Funds Scholarship,Peking University,1992.•Legend Scholarship,Peking University,1991.•Student Scholarship for attending conferences,including:AAAI-02,IJCAI-01,AAAI Spring Symposium Series 2001,AIPS-00,AAAI-00.Journal Publications:•Sven Koenig,Maxim Likhachev,Yaxin Liu and David Furcy.Incremental Heuristic Search in Artificial Intel-ligence.AI Magazine,25(2):99-112,2004.•Sven Koenig and Yaxin Liu.The Interaction of Representations and Planning Objectives for Decision-Theoretic Planning Tasks.Journal of Experimental and Theoretical Artificial Intelligence,14(4):303-326,2002.•Sven Koenig,Boleslaw Szymanski and Yaxin Liu.Efficient and Inefficient Ant Coverage Methods.Annals of Mathematics and Artificial Intelligence,31:41-76,2001.•Yaxin Liu and Etienne E.Kerre.An Overview of Fuzzy Quantifiers,Part I:Interpretations.Fuzzy Sets and Systems,95:1-21,1998.•Yaxin Liu and Etienne E.Kerre.An Overview of Fuzzy Quantifiers,Part II:Reasoning and Applications.Fuzzy Sets and Systems,96:1-12,1998.Referred Conference Publications:•Yaxin Liu and Sven Koenig.Existence and Finiteness Conditions for Risk-Sensitive Planning:Results and Conjectures.Accepted to the Twenty-First Conference on Uncertainty in Artificial Intelligence(UAI-05).Acceptance rate35%(86/243).•Yaxin Liu and Sven Koenig.Risk-Sensitive Planning with One-Switch Utility Functions:Value Iteration.Accepted to the Twentieth National Conference on Artificial Intelligence(AAAI-05).Acceptance rate18% (148/803).•Matthew E.Taylor,Peter Stone,and Yaxin Liu.Value Functions for RL-Based Behavior Transfer:A Compar-ative Study.Accepted to the Twentieth National Conference on Artificial Intelligence(AAAI-05).Acceptance rate18%(148/803).•Peter Stone,Gregory Kuhlmann,Matthew E.Taylor,and Yaxin Liu.Keepaway Soccer:From Machine Learning Testbed to Benchmark.Accepted to the Ninth RoboCup International Symposium(RoboCup-05).Acceptance rate27%(36/131).•Yaxin Liu,Richard Goodwin,Sven Koenig.Risk-Averse Auction Agents.Proceedings of the Second In-ternational Joint Conference on Autonomous Agents and MultiAgent Systems(AAMAS-03),pages353-360, Melbourne,Australia,July14-18,2003.Acceptance rate25%(115/466).•Yaxin Liu,Sven Koenig,and David Furcy.Speeding Up Calculation of Heuristics in Heuristic Search-Based Planning.Proceedings of the Eighteenth National Conference on Artificial Intelligence(AAAI-02),pages484-491,Edmonton,Canada,July28-August1,2002.Acceptance rate26%(121/469).•Sven Koenig and Yaxin Liu.Terrain Coverage with Ant Robots:A Simulation Study.Proceedings of the Fifth International Conference on Autonomous Agents(AGENTS-01),pages600-607,Montreal,Canada,May28-June1,2001.Acceptance rate27%(66/248).•Sven Koenig and Yaxin Liu.Representations of Decision-Theoretic Planning Tasks.Proceedings of the Fifth International Conference on Artificial Intelligence Planning and Scheduling(AIPS-00),pages187-195,Breck-enridge,CO,April15-17,2000.Acceptance rate36%(30/84).•Sven Koenig and Yaxin Liu.Sensor Planning with Non-Linear Utility Functions.Proceedings of the Fifth European Conference on Planning(ECP-99),pages265-277,Durham,UK,September8-10,1999.Acceptance rate42%(27/65).Other Conference,Workshop,and Symposium Publications:•Yaxin Liu,Richard Goodwin,and Sven Koenig.Risk-Sensitive Planning in AI with Nonlinear Utilities(Ab-stract).Extended Conference Program of the Ninth INFORMS Computer Society Conference,Annapolis,MD, January5-7,2005.•Yaxin Liu and Sven Koenig.Existence and Finiteness Conditions for Risk-Sensitive Planning:First Results.Proceedings of the AAAI-04Workshop on Learning and Planning in Markov Processes—Advances and Chal-lenges,San Jose,CA,July26,2004.•Yaxin Liu,Richard Goodwin and Sven Koenig.Risk-Averse Auction Planning and its Integration into Supply-Chain Management Systems.Proceedings of the AAAI-01Spring Symposium on Game Theoretic and Decision Theoretic Agents(GTDT-01),Stanford,CA,March26-28,2001.•Sven Koenig and Yaxin Liu.High-Stake Sensor Planning.Proceedings of the AIPS-00Workshop on Decision-Theoretic Planning,pages88-92,Breckenridge,CO,April14,2000.•Sven Koenig and Yaxin Liu.Simulating High-Stake Decisions.Proceedings of the Eighth Conference on Computer Generated Forces and Behavioral Representation(CGF-BR’99),pages499-504,Orlando,FL,May 11-13,1999.Theses:•Yaxin Liu.Decision-Theoretic Planning Under Risk-Sensitive Planning Objectives.PhD Thesis,College of Computing,Georgia Institute of Technology,Atlanta,GA.April2005.•Yaxin Liu.A Tentative Meta-Level Control Mechanism for Reasoning and Decision-Making with Bayesian Networks under Temporal Constraints.Master’s Thesis,Department of Computer Science and Technology, Peking University,Beijing,China.June1997.•Yaxin Liu.Object-Oriented Analysis and Design of Geographic Information System Development Environment for Windows Using MFC(in Chinese).Bachelor’s Thesis,Department of Computer Science and Technology, Peking University,Beijing,China.June1994.Miscellaneous Publications:•Solved problems for Chapter7:Stochastic Methods,in Solution Manual to accompany Pattern Classification, the second edition,by Richard O.Duda,Peter E.Hart,and David G.Stork.Wiley,2000.•Translated into Chinese Chapters40-42of The Fractal Geometry of Nature,by Benoit B.Mandelbrot.Far East Publishers,1998.Papers in Preparation:•Yaxin Liu and Sven Koenig.Risk-Sensitive Planning with One-Switch Utility Functions:Backward Induction.•Sven Koenig and Yaxin Liu.Planning for Information Gathering with Non-Traditional Planning Objectives.•Yaxin Liu and Sven Koenig.Risk-Sensitive Planning with Factored MDPs.•Yaxin Liu and Sven Koenig.Approximate Risk-Sensitive Planning with Piecewise Linear Functions. Program Committee:•IJCAI-2005Workshop on Planning and Learning in A Priori Unknown or Dynamic Domains.Journal Reviews:2003Autonomous Robots,Mobile Computing and Communications Review(MC2R).2001IEEE Transactions on Evolutionary Computation.2000Annals of Mathematics and Artificial Intelligence,Journal of Artificial Intelligence Research(JAIR).1999Machine Learning Journal.Conference Reviews:2005International Joint Conference on Artificial Intelligence(IJCAI)(2x posters),IJCAI Workshop on Planning and Learning in A Priori Unknown or Dynamic Domains(2x).2004International Conference on Intelligent Autonomous Systems(IAS),International Conference on Machine Learning(ICML)(3x),International Symposium on Artificial Intelligence and Mathematics(AI+MATH) (2x),Neural Information Processing Systems(NIPS)(2x).2003International Conference on Automated Planning and Scheduling(ICAPS)(2x).2002International Conference on Artificial Intelligence Planning and Scheduling(AIPS)(2x),International Con-ference on Machine Learning(ICML)(2x),National Conference on Artificial Intelligence(AAAI),Neural Information Processing Systems(NIPS)(2x).2001European Conference on Planning(ECP)(2x),International Joint Conference on Artificial Intelligence(IJCAI) (2x),Neural Information Processing Systems(NIPS)(3x).2000International Conference on Machine Learning(ICML)(3x),International Conference on Tools with Artificial Intelligence(ICTAI)(2x),Pacific Rim International Conference on Artificial Intelligence(PRICAI).1999Australian Joint Conference on Artificial Intelligence,International Joint Conference on Artificial Intelligence (IJCAI)(3x).Service and Members:•American Association of Artificial Intelligence(AAAI),Member,since1999.•Graduate Admissions Committee,College of Computing,Georgia Institute of Technology,2000–2002.•Student Volunteer,AAAI-04,San Jose,CA.•Student Volunteer,AAAI-02,Edmonton,Alberta,Canada.•Student Volunteer,IJCAI-01,Seattle,WA.•Student Volunteer,AAAI-00,Austin,TX.•Student Volunteer,AAAI-99,Orlando,FL.Skills:Italic for items with most familiarity.Programming Languages:C/C++,Java,Lisp,Mathmatica,MatLab,Perl,Pascal,Smalltalk,Prolog,shell scripts, HTML,XML,SQL.Environments:Linux,Solaris,Windows.Software/Programming Libraries:TCP/IP,pthread,Visual C++(MFC),STL,OpenGL,LaTeX,Gnome, Oracle,ODBC,Java RMI,Java Swing,CORBA.Areas with Experiences:AI,programming languages,graphics,operating systems,networking,database,GIS, natural language processing.Citizenship and Visa Status:•Citizen of China.•F-1student visa,on OPT.References:•Dr.Sven Koenig,AdvisorAssociate Professor,Computer Science DepartmentUniversity of Southern California941W.37th Place,Los Angeles,CA90089-0781Phone:(213)740-6491Email:skoenig@•Dr.Craig Tovey,Co-advisorProfessor,College of Computing and School of Industrial and Systems EngineeringGeorgia Institute of Technology765Ferst Drive NW,Atlanta,GA30332-0205Phone:(404)894-3034Email:craig.tovey@•Dr.Richard T.GoodwinManager,Semantic eBusiness MiddlewareIBM T.J.Watson Research Center19Skyline Drive,P.O.Box704,Hawthorne,NY10532Phone:(914)784-7608Email:rgoodwin@•Dr.Anton KleywegtAssociate Professor,School of Industrial and Systems Engineering Georgia Institute of Technology765Ferst Drive NW,Atlanta,GA30332-0205Phone:(404)894-4323Email:anton.kleywegt@。
英语四级高频单词及例句
高频单词及例句Accomplish1.I will accomplish my purpose at any price.我决心不惜任何代价达到我的目的。
2.In order to accomplish this, we must formally record these expectations.为了达到这个目标,我们必须正式记录这些期望。
3.Plan and manage the tax of the enterprise,accomplish tax declare and the annual audit on time.对公司税收进行整体筹划与管理,按时完成税务申报以及年度审计工作;Advanced1.We open to the world and learn the advanced science and technology from the other country.我们应当向世界敞开大门,学习其他国家的先进的科学和技术。
2.Today it is once again a deadly condition which requires more advanced research and attention.现今它又再一次是致命的疾病,需要更先进的研究及更多的注意力。
3.To introduce the advanced principle of walking beam furnace and the advanced process of controlling heating furnace burning with PLC.介绍了先进的步进梁式加热炉的工作原理及全部采用PLC控制加热炉燃烧的先进工艺。
balloon1. He pricked the toy balloon .他在玩具气球上刺洞。
2. Wow, a balloon to be it! Aimed at quickly!哇,气球要被打爆了啦!快点瞄准!3. I want a yoyo. I want a ball. I want a balloon.我想要一个悠悠球。
轮式装载机工作装置的虚拟设计和三维仿真毕业设计论文
文档从互联网中收集,已重新修正排版,word格式支持编辑,如有帮助欢迎下载支持。
XXXX大学本科毕业设计(论文)学院专业机械设计制造及其自动化学生姓名班级学号指导教师二零年月XXXX大学本科毕业论文ZL50G式轮式装载机工作装置的虚拟设计和三维仿真The type of ZL50G wheel loader working device virtual design and three-dimensional simulation完整的毕业设计过程ProE 三维建模,包括零件,装配图以及运动仿真这里贴上转载机CAD图该毕业设计成果经过严格而完整的毕业答辩过程,并取得优秀。
如有需要可以联系球球3(理工类):X X X X大学毕业论文(设计)任务书学院:专业:机械设计制造及其自动化学号:姓名:指导教师:职称:20 年月日注:1、如页面不够可加附页2、以上一~五项由指导教师填写摘要装载机是铲土运输机械类中的一种,常见的装载机有自行式履带装载机和轮胎式装载机,装载机主要由工作装置、动力系统、传动系统、制动系统、行走系统、液压系统、电气系统等组成。
本篇论文主要讨论装载机工作装置系统的三维设计和运动仿真。
装载机工作装置主要包括铲斗、工作装置连杆系统、机架等部分,其中铲斗的设计与参数计算、工作装置连杆系统的设计与参数计算是本次设计与计算的重点,工作装置连杆系统的三维建模与运动仿真主要在Pro/E软件中设计完成。
装载机是工程机械中的重要机种,主要用于公路建设、铁路修建、建筑工程、港口与矿山建设等工程建设中,而轮式装载机是目前应用最为广泛的机种,轮式装载机具有作业速度快、效率高、维修方便、机动性好、操作轻便等优点,因此其应用广泛。
在轮式装载机工作装置的设计中,目前应用最为广泛的工程设计软件是美国参数技术公司推出的Pro/E软件,在本次设计中也将应用Pro/E软件来进行工作装置的三维建模和运动仿真。
关键字:轮式装载机工作装置三维建模运动仿真AbstractLoaders belong to shovel transport machinery, is a front-mounted bucket supporting structure and linkage, loading or excavating when it goes forward, as well as upgrading, transportting and unloading machinery self-propelled crawler or tire .It is widely used in highway, railway, construction, electrical and mechanical, port and mining and other projects.Loader has many advantages such as fast operating speed, high efficiency, good mobility, easy operation, etc. so it becomes the main machinery in the engineering construction of earthwork construction.Loaders plays an important role in the construction of speeding up construction speed, reducing labor intensity, improving project quality, reducing project costs and also become a indispensable modern machinery.Loader is widely used construction machinery.But the traditional development model exists lots of problems such as longer development cycle ,complex process, high development costs,difficult performance testing.This article will introduce the simulation technology in the loaders development field,complete the following tasks.Keywords: Loader; Working device; Three-dimensional modeling; Motion Simulation目录第一章绪论----------------------------------------------------------11.1 装载机总体概况------------------------------------------------------11.2 装载机的简介--------------------------------------------------------11.2.1 我国装载机发展历史--------------------------------------------11.3 Pro/ENGINEER软件在工程设计中的应用----------------------------------4第二章轮式装载机工作装置的设计--------------------------------62.1 工作装置的组成------------------------------------------------------62.2 铲斗设计------------------------------------------------------------62.2.1 铲斗斗型的结构分析--------------------------------------------72.2.2 铲斗基本参数的确定--------------------------------------------82.2.3 斗容的计量---------------------------------------------------102.3 工作装置的设计和图解法的应用---------------------------------------122.3.1 动臂与铲斗、摇臂、机架的三个铰接点B、E、A的确定---------------132.3.2 连杆与铲斗和摇臂的两个铰接点C、D的确定----------------------152.3.3 举升油缸与动臂和机架的铰接点H及M点的确定--------------152. 4 确定动臂油缸的铰接位置及动臂油缸的行程--------------------------162. 4.1 动臂油缸的铰接位置-----------------------------------------16l 的确定--------------------------------------172. 4.2 动臂油缸行程H第三章装载机工作装置三维实体建模----------------------------183.1 工作装置零件建模-----------------------------------------------183.1.1 动臂的生成------------------------------------------------223.1.2 铲斗的生成--------------------------------------------------233.1.3 机架的生成 -------------------------------------------------233.1.4 连杆的生成--------------------------------------------------233.1.5 摇臂的生成---------------------------------------------------243.1.6 液压缸筒和活塞的生成-----------------------------------------243.1.7 连接销轴的生成-----------------------------------------------25 3.2工作装置的装配模型-------------------------------------------------27 第四章装载机工作装置运动仿真--————-----------------324.1 概述---------------------------------------------------------------32 4.2 创建机械运动仿真环境-----------------------------------------------324.2.1 创建快照-----------------------------------------------------32 4.2.2 定义伺服电机-------------------------------------------------32 4.2.3 运动运动-----------------------------------------------------35 4.2.4 测量---------------------------------------------------------39 致谢------------------------------------------------------------------43 参考文献-------------------------------------------------------------44第一章绪论1.1 装载机总体概况装载机是现代工程机械的重要机种之一,它在公路、铁路、建筑、水电、港口、矿山等建设中发挥极其重要的作用,常用在铲装土壤、砂石、石灰、煤炭等散状物料的施工中,同时能对矿石、硬土等进行轻度铲挖工作。
IMS在PSTN向NGN过渡中扮演的角色

IMS在PSTN向NGN过渡中扮演的角色抽一传统PSTN向NGN的过渡正在开始加速.IP多媒体子系统(IMS)目前被许多运营商所看好,将IMs视做过渡的关键.然而要使IMs满足固定网与移动网融合的要求和适应NGN标准的宽泛框架,还有不少标准问题需要解决.首先介绍了IMs的特点和标准开发现状,以及IMS与1rISPAN的关系.然后详细介绍了ETSI为支持PSTN向V oIP过渡而定义的两个重要业务予系统:PSTN仿真和PSTN模拟.最后提出了IMS应用到实际网络时将遇到的安全性问题.关.■一IMS,TISPAN.PSTN仿真,PSTN模拟,安全Abstract:Thetransitionpacefrom~aditionalPS1'NtoNGNisspeedingupAtpresent, manycarriersholdanoptimisticattitudetowardIPmultimediasubsystem(IMs1andtakeita8akeycomponentofthetransition.However,inordertoenableIMStosatisfythe convergenceoffLxednetworkandmobilenetwork.andkeepitinlinewiththeoverallframeworkofNGNstandardaswel1.there8re stillmanyproblemsconcerningstandardneedt0beBemed.Thisarticlefirstlyintroducesthe characteristicofIMS.thestatusquoofitS standarddevelopmentandtherelationship betweenIMSandTISPAN.Then.it introducestwoimportantservicesubsystemsfi.e.PSemulationandPS1'Nsimulation)which啪definedbyETSIforsupportingthetransitionfromP:11Nt0V olPindetail.Atlast,itputsforwardtheexistingsecurityproblemswhenappl~ngIMSinpracticalnetwork.IP多媒体子系统(IMS)目前被许多运营商看作传统PSTN向下一代网(NGN)和V oIP过渡的关键,有的把它看作"核心部件",有的把它说成"重要部件".最近几个月以来,不断有运营商开始计划IMS网络的报道,美国4大地区贝尔公司中已经有3家(SBC,BellSouth与Verizon)有所具体行动.其中,SBC是美国第一个宣布把IMS作为未来网络关键组成部分和固定移动融合工具的运营商,它计划于2006年下半年或2007年年初完成平台的部署,配合其光速计划,将在其有线和无线网络上为用户提供统一的三重业务(triple—play).虽然向NGN的过渡正在开始加速,但是要使IMS满足固定网与移动网融合的要求和适应NGN标准的宽泛架构还有不少标准工作要做.一.-MS与NGN从运营商的角度看,推动运营商向NGN和V olP过渡的动力有两部分.一部分跟降低运营成本(OPEX)以及重建现有PSTN有关;另一部分是为了让运营商能够以非常成本有效的方式开拓新的收入来源.尤其是传统运营商,面对日趋下降的电话收入,它们试图通过向NGN的过渡,充分利用目前已建的宽带网以及使用新的低成本NGN设备来替换旧的PSTN设备,以降低运营成本.当然,在向NGN过渡期间还须保证原来业务的透明性,把向NGN过渡的风险减至最小.此外,运营商还试图利用NGN来降低增加新业务的增量成本,通过固定网与移动网的融合来获得新的收入来源.目前,不少运营商把IMS看做达到上述目标的关键使能器.其中,低成本引入新业务和使固定网与移动网融合是最主要的. 只有这样,运营商才能通过IMS向用户提供更多的价值,降低运行成本,改善对用户的服务,减少用户"跳槽"的可能.同样从运营商的角度看,NGN将通过三个阶段进行演变,.■蕾盔先是降低基本业务成本,再是利用V oIP和多媒体进行业务创新,最后是向运营商提供能够利用IMS在新的市场上成功竞争的手段.-.IMS的特点与好处IMS最初是由3GPP制定的,在2002年发布了IMSRelease5.IMS被设计用于处理基于IP的业务或应用,尤其是基于会晤的实时应用.所以3GPP把IMS建立在已经广泛用于V oIP的SIP协议标准的基础上.但是,3GPP在移动领域为一些在向IP过渡时仍想保留的重要概念增加了各种扩充,包括QoS,有效处理移动无线电传送的能力以及认证和用户轮廓管理.IMS的主要目的是为用户创造和控制高价值的实时IP应用(如电话,会议,传信和多玩家游戏等)构建一个强有力的机制.IMS建立在一个分层的体系结构上,符合NGN把uteri控制与传送分离的要求,这是它的关键所在. 如图1所示,IMS有三个层面:传送层,控制层和业务层.控制层是IMS的核心.IMS通过控制层把IP 网从用户设备延伸到服务方或被叫方,同时保持与接入网类型和服务类型无关.由于与接入无关,故IMS不仅限于3G网络使用,它还可以用于传统网络和新的接入网.在IMS的控制层中有三个控制功能:会晤控制功能(CSCF),切入网关控制功能(BGCF)和媒体网关控制功能(MGCF).其中,CSCF是新创造的核心部件,它起到中央选路引擎,策略管理器和策略强化点的作用,目的是便于通过lP网来提供多个实时应用.这一功能是应用感知的,使用动态的会晤信息来管理网络资源(包括特色服务器,媒体网关和边缘设备)以及根据每一应用和用户的情况来提前分配这些资源.BGCF和MGCF未示于图1,前者位于IMS 域与外部网络的分界点,在PSTN将要切人时为会晤选择网络;后者提供与PSTN互通或与3GPP电路交换侧互通的信令.图1中的归属用户服务器(HSS)也是一个新的关键部件.它对每一用户的业务相关数据提供开放接人,支持多种业务之间的数据(如目前状态等)共享,有利于创新并可以解决一系列业务逻辑交互问题.早先的业务体系结构,如高级智能网(AIN)等,图1IMS分层体系结构是无法做到这些的.HSS非常灵活,支持各种前端(如Web,电话,SMS和机顶盒等)对用户数据的开放读/写接入.HSS使网络通过IMS开发和部署新业务的能力有了很大的提高,也使网络首次有了能让不同应用服务器共享用户数据的开放接口.这些数据包括用户定购的是什么业务,它们处在什么激活状态以及为了控制它们用户设置了什么参数. 在业务层,3GPP定义了各种应用服务器,包括基于SIP的应用服务器和传统应用服务器.IMS的应用体系结构是相当复杂的,但关键是它允许存在很多的灵活性,有了这些灵活性,就可以用不同的应用服务器来生成业务.另外,IMS还可以综合传统的业务.例如,消息传送环境可以与传统话音服务特点,如回叫或呼叫等待等综合在一起.这样就可以把传统的环境和服务经验与新的应用结合在一起,真正实现未来的V olP战略.归纳起来,IMS会给运营商带来以下好处:引入了把传送,控制与应用分开的分层结构;与接人无关,允许运营商把固定网与移动网融合起来;可提供具有QoS,安全性,计费以及其他电信公司所需重要功能的实时IP应用;.可提供把不同应用的特点结合在一起的各种新应用,如网络游戏等;可更快,更低成本地提供更多的应用,而且同时保留对QoS,计费和收入的控制;可以逐步部署,不必采取昂贵的重叠方式,传黔耍牙≯g0—0一囊j¨.叠00搿i■碧_一誊ll_季孽辑澎臻一,覃了再算霉零瓣碧黪≯1'_曩嚣岱—----—_??—?-——————_u譬|||誓|}组织网络类型名称状态会晤初始协议(SIP),SIP于1999年初获得批准;IETF与3GPP在IMS方面IETF任何IP网Diameter紧密合作最先在3GPPRelease5中定义;在Release6中细化;3GPPUMTS移动网;将延伸至其他接入网IP多媒体子系统(IMS)现正在制订Release73GPP2cdma2000移动网;将延伸至其他接入网多媒体域(MMD)对照3GPP而制定;可与3GPPIMS互操作CableLabs电缆IP网PacketCable2.0预期IMS将形成基于SIP的控制层核心ETSI下一代固定网TISPANReleaseI于2005年12月批准.主要基于IMSATIS北美固定网NGN主要基于TISPANITU下一代固定网ITUSG13NGN很大程度上基于TISPAN的工作OMA所有移动网OMAPOC聚焦于业务的标准定义来源:HeavyReading.2005统网络中的接入资源,应用和用户可被继续利用.三JMS标灌支持IMS吸引了各标准组织的广泛关注,尤其是关于它在向NGN过渡中的角色.表1列出了一些主要的标准组织,其中有专门围绕IMS工作的组织,也有工作内容与IMS相关的组织.历史上,3GPP与IETF关系紧密,二者一起为IMS的基本框架进行标准化工作.它们的工作成果后来为3GPP2所用,用于cdma2000多媒体域.Ca—bleLabs将在它基于SIP的控制层核心中使用IMS. ETSI把IMS用作TISPANNGN体系结构的基础,旨在为所有基于NGN的电信业务提供统一的结构.由于ITU和美国的A TIS也把它们自己的NGN体系结构建立在TISPAN工作成果的基础上,故TISPAN的工作成果有可能成为未来NGN的业务体系结构.所以,了解TIASPAN及其与IMS的关系是十分重要的. 四JMS与TISPANTISPAN是Telecommunicati0nsandInternetSer—vicesandProtocolsforAdvancedNetworking的缩写.为了避免重复工作,TISPAN基本上把IMS用于ETS1所定义的"会话"业务,尤其是任何SIP型的呼叫会晤.为了更好地满足目前正运行PSTN和宽带DSL的传统运营商向NGN过渡的需要,TISPAN在IMS中加入了一系列子系统.IMS显然是ETsI希望实现的NGN的核心.TISPAN将会发布若干版本,版本1已于2005年12月获准发布.TISPAN的参考体系结构相当复杂,与NGN广泛相关,不仅仅是增加IMS功能而已,如图2所示.类似1MS,TISPAN也是一个分层结构,但划分得要更细—些.在图2中,最终用户位于左边,固定无线接入网与公共IP核心传送网(传送层面)位于底部.右边是网间接口和网关(只示出了PSTN).上面是业务控制层面,其中针对不同的业务类型有不同的控制层.例如,对软交换有PSTN仿真子系统,对IMS业务有IMS子系统.中间是资源和准用控制功能,用于控制提供给各种不同业务的容量.另外还有网络属性子系统,用于用户认证和应急呼叫位置数据以及其他. 把IMS延伸到固定网的TISPAN可以被看做IMS版本不断发展的一部分.IMS版本5包括移动接入,版本6增加了无线LAN接入,目前的版本7 (相当于TISPAN版本1)又增加了固定网.版本7只增加了两个对固定网很重要的功能:网络屙I生,它基本上意味着"你是谁?",这对固定线路是必需的,因为它没有能识别用户的SIM卡;资源准用,为了支持会晤而在固定网中预留资源.由于IMs从移动网延伸到固定网,利用了IMS整个标准化工作的95%,因此可以确保它形成的是适合于未来固定与移动走向融合的一个环境.五.PSTN仿真PSTN横瓤从话音业务的角度讲,PSTN向NGN的过渡即意味着向V oIP的过渡.为此,ETSI定义了两个重要的业务子系统,即PSTN仿真子系统和PSTN模拟子系统.它们的定义分别是:利用在IP接口和基础设施的会晤控制来提供类似PSTN/ISDN的业务能力;利用对IP基础设施的适配来提供PSTN/IS—DN的业务能力和接口.PSTN仿真的概念是在NGN内生成与PSTN效果相同的业务,具有相同的业务特点,这意味着就最终用户而言什么也没变.相反,PSTN模拟所提供的业务看起来像PSTN或ISDN业务,但并不是在所有方面都像.例如,它可以使用各种新的终端类型提供新的增值特点,但它也许不能提供某些老的特点.模拟比完全复制旧环境更有利于向NGN环境演进.重要的是,仿真与模拟之间的差别为运营商的NGN过渡策略提供了一种选择.在做出选择时,关键因素是运营商所处的竞争状况.这里并非强调有两个系统,也非强调有两种结构,关键在于何时引入何种V oIP能力最有利.模拟和仿真都是IMS的一部分, 运营商何时引入何种V oIP显然与运营商的竞争地位和市场相关,也与现有PSTN的状态与行为相关.当运营商面临激烈竞争和在其宽带业务捆绑中包括V oIP 的需求压力很大时,PSTN模拟是较好的选择,因为可以对这种强势需求做出迅速响应,在新的演进中的多媒体市场中确立地位.相反,当竞争压力不大,运营商的主要兴趣是用低成本NGN来提供话音业务时,那么PSTN仿真更合适.1MS是对电话基础设施进行现代化改造所需的体系结构.通常,网络的过渡应比端点从POTS向IP的过渡快许多.所以,作为内在的一个功能,IMS支持PSTN仿真十分重要.PSTN仿真与PSTN模拟的实现并非易事.对PSTN仿真而言,PSTN的业务逻辑必须分布在PSTN 接入适配功能与PSTN仿真服务器之间.由于PSTN 有100多个业务特点,因此需要复杂的SIP呼叫流程.对于简单的呼叫建立,把PSTN信令映射到SIP中去还比较容易,但想用SIP信令来仿真全部的标准PSTN业务则很困难.主要问题之一是PSTN与SIP在体系结构上不匹配.PSTN采用激发/响应协议,终端是完全傻的,所有智能都在网络之中.相反, SIP是对等会晤控制协议,终端将是高度智能的,能够完成呼叫处理,而网络也许相对笨一些.所以,事实上,目前广泛使用的PSTN业务基本上依靠集中的智能,而无法利用终端里的智能来实现.IMs没有为最基本的呼叫业务定义SIP呼叫流程.但IETF则在这方面开展了较多的活动,有许多文件都是讨论基本呼叫业务的SIP呼叫流程,只不过目前还没有形成标准.困难在于不同的SIP端点(包括IAD,模拟电话适配器,SIP电话以及最近的宽带环路载波)支持业务特点的方法有很大的差异, 故不得不靠应用服务器来处理.例如,拍叉簧信号处理是PSTN信令的一个重要方面,呼叫转移和三方通话等业务都需要这种功能.如果SIP端点不进行拍叉簧信号处理和会晤操作,那么这些端点只是送出一个SIP消息,表示拍叉簧已发生,并让应用服务器去处理.IETF目前正在试图开发在SIP端点上对拍叉簧信号进行处理的功能,但这一功能的开发是有相当难度的.要获得成功,就需要在接人设备供应商和软交换设备供应商之间开展紧密合作.现在这一问题正在通过合作予以解决,相信PSTN仿真一定会得到IMS核心网的支持.PSTN模拟并不包括全部的PSTN业务特点,同时还具备生成新业务和新业务特点的灵活性,但目前也面临端点与网络交互作用方面的呼叫控制问题.我们知道,企业用户是目前典型的用户.虽然SIP企业电话具有许多本机的业务智能,但仍需要与网络中的许多智能结合起来.有许多企业业务特点,如寻线组等,都不能单独在电话机内实现.对于许多其他业务特点,对于在什么地方,如何实施业务逻辑也有许多不同观点.这可能导致在实施这些特点的细节上有很大的不同.例如,请勿打扰特点可以用拒绝呼叫和呼叫转移两种方法来实现,这对于大的企业用户来说是不能接受的,他们希望获得一致的,可预见的业务特性.因此,为了对业务进行规格化以及保证用户获得一致的,可预见的业务体验,的确需要把话机智能与网络智能相结合.在网络演进过程中,可以把PSTN仿真与PSTN模拟一起放在网络里.仿真用于把用户的主要PSTN业务逐渐演进为低成本NGN,模拟则用来向日益增加的多媒体用户提供与宽带捆绑的次要话音业务.在这两种情况中,IMS都将扮演重要的角色. 但如何在运营商的网络中实现IMS,目前在运营商与设备商之间仍存在着争议.争议之一是,是否要具有完全仿真的业务,把所有传统的业务特点都带人提供仿真业务的IMS,提供百分之百相同的业务.另一问题是,如何保证IMS电话不仅对SIP是相同的,而且对移动也是相同的.ETSI和3GPP都在制订使用PSTN模拟的标准化电话方式,力图让运营商尽可能多地利用其现有的接人基础设施,能够按照灵活替换和有序的策略去尽可能多地保护已有投资,使运营商具有在它们的接人环境中引人必要网关功能与中继网关功能的灵活性,以便把传统世界与新的IMS世界结合在一起,更好地适应各种情况.穴.曩安全有关的两大问■虽然IMS取得了不少进展,但当应用到实际网络时在标准方面仍有明显的不足.两个最主要的问题是跟会晤边界控制(SBC)和应急业务相关的安全陛.SBC 对固定网而言,是—仁常重要的功能.为了保护网络不被滥用,以及处理用户网络中NA T防火墙的穿越和支持呼叫合法截获的要求,都需要这一功能.至今在IMS标准中尚未充分认识到这种安全性风险,在3GPP的IMS规范中甚至没有提及SBC. 目前规范中的Proxy—CSCF最接近等效于SBC,但Proxy—CSCF为了针对信令过载对网络进行保护,不受IMS规范的控制.对这种安全性的忽视也许是因为当初认为想注人恶意信令的PC机难以接人3G移动网,或者认为IMS不需要解决SBC要处理的其他各种问题,如处理NA T防火墙穿越问题.用于V olP的应急呼叫也是运营商非常关注的一个安全性问题,目前也没有规范好.对于应急呼叫,必须提供关于呼叫来自何处的地理位置信息.在PSTN中,这很容易做到,因为位置由电话号码定义.但在V olP中,这涉及网络属性功能(NAF)子系统进入的地方以及检索位置信息和注册IP地址的地方.第二个关键要求是回叫能力.在PSTN中,这很简单,因为主叫线路标识可以给出回叫固定号码.但V olP如何实现回叫还没有标准化.不过,TISPAN并没有忘记跟管制相关的一系列安全l生与法律要求.例如,Ell2应急呼叫,恶意电话识别和匿名电话拒绝;提供确认的位置信息;支持固定线路的识别以及3GPPIMS型用户识别;允许NA T和防火墙存在于接入网用户驻地;满足管理和运行需求(包括计费和结算)等.TISPAN现正在引导这方面的标准制订工作.向收稿日期:2005—12—29。
Viking Yacht Company的Autodesk解决方案的应用说明书
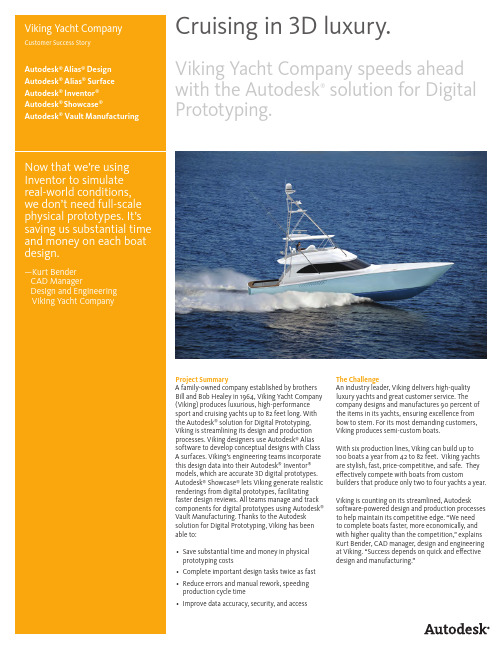
Project SummaryA family-owned company established by brothers Bill and Bob Healey in 1964, Viking Yacht Company (Viking) produces luxurious, high-performance sport and cruising yachts up to 82 feet long. With the Autodesk ® solution for Digital Prototyping, Viking is streamlining its design and production pro c esses. Viking designers use Autodesk ® Alias software to develop conceptual designs with Class A surfaces. Viking’s engineering teams incorporate this design data into their Autodesk ® Inventor ® models, which are accurate 3D digital prototypes. Autodesk ® Showcase ® lets Viking generate realistic renderings from digital prototypes, facilitating faster design reviews. All teams manage and track components for digital prototypes using Autodesk ® Vault Manufacturing. Thanks to the Autodesk solution for Digital Prototyping, Viking has been able to:• Save substantial time and money in physical prototyping costs• Complete important design tasks twice as fast • Reduce errors and manual rework, speeding production cycle time• Improve data accuracy, security, and accessThe ChallengeAn industry leader, Viking delivers high-quality luxury yachts and great customer service. The company designs and manufactures 90 percent of the items in its yachts, ensuring excellence from bow to stern. For its most demanding customers, Viking produces semi-custom boats.With six production lines, Viking can build up to 100 boats a year from 42 to 82 feet. Viking yachts are stylish, fast, price-competitive, and safe. They effectively compete with boats from custombuilders that produce only two to four yachts a year. Viking is counting on its streamlined, Autodesksoftware-powered design and production processes to help maintain its competitive edge. “We need to complete boats faster, more economically, and with higher quality than the competition,” explains Kurt Bender, CAD manager, design and engineering at Viking. “Success depends on quick and effective design and manufacturing.”Cruising in 3D luxury.Viking Yacht Company speeds ahead with the Autodesk ®solution for DigitalPrototyping.The SolutionViking has been transitioning to the Autodesk solu t ion for Digital Prototyping for several yearsto meet its business needs. Recently, the pace of migration has increased rapidly. “People began to realize how much time Alias and Inventor software would save them, and the transition took off,” says Bender. “In a relatively short time, we’ve turned more than 30 2D CAD users into trained Inventor experts.”Faster Conceptual DesignsToday, Viking designers rely on Alias software to conceptualize designs and create surfaces. “Many of our new models, like the 76C, utilize all the programs associated with the Autodesk digital workflow,” says Bender. “And it starts with Alias.”At a project’s inception, designers use Alias software to develop Class A surfacing for hulls. Viking imme d iately noticed a difference. “We used to depend on extensive hand fairing to address surface flaws,” says Bender. “But now, our Alias surfaces are so precise that we are able to eliminate a substantial amount of time required to work the tools. By using Alias software, we’re cutting our turnaround time on projects tremendously—which helps us get to market faster.”Easier ChangesAutodesk Alias software has also sped up design changes for Viking. In pursuit of design excellence, Viking routinely puts designs through manyitera t ions. In the past, one change could mean 40 hours of design rework. Now, design changes no longer require such time-intensive manual work.“Before when we had a change, we had to redomost of the surfaces from scratch,” explainsJamie Scherer, CAD Designer in the design andengineering department at Viking. “With Alias, thesurfaces adjust automati c ally. Instead of taking 40or more hours of work, Alias software lets us makechanges in as little as an hour.”Digital Prototypes Streamline DesignWhen a concept model is ready, Viking easily movesit from Autodesk Alias into Autodesk Inventorsoftware. Then engineers create a digital prototypefor use in every stage of production. “We areclosing the gap between design, engineering, andmanufacturing,” says Bender. “Our digital prototypegives everyone a better understanding of howthings fit together.”Before moving to Inventor software, Vikingde s igned components—such as couches,staterooms, and cabinetry—as 2D polygon lines. “Itwas hard to check interferences before production,”notes Scherer. “By moving to digital prototypes,we can visualize the space better and checkinterferences ahead of time. We are much moreefficient in fixing problems on the shop floor.”Digital Prototyping also speeds collaboration acrossViking’s production team. “We used to try andcollaborate around D-size prints posted arounda conference room,” says Bender “Now, we havea digital prototype we can turn around, spin, andvisualize accurately. We even include productionsupervisors in reviews so they can spot issues thatmay slow production.”Adds Scherer: “Our digital prototypes not only helpour teams proactively create better designs, theyare having a real impact on reducing errors we oncecaught only in production.”Automating Manual Design TasksAutodesk Inventor Professional is also helpingViking complete designs faster and with fewererrors by automating many routine design tasks,such as routing hoses, pipes, and cables throughouta yacht. For example, Viking no longer must handmeasure cable and wire lengths, a time-consumingand error-prone process.“We had no way to design tube and pipe layoutsin our former 2D CAD software and had difficultygenerating wire lengths,” says Scherer. “Inventorlets us clearly, quickly, and accurately determine thelengths of pipes, wires, and cables, even when theyfollow nonlinear surfaces.”Simulation AnalysisThe digital prototypes Viking creates in AutodeskInventor help the company maximize yacht speedand performance. “After engineers locate allcom p onents inside a vessel, we can assign weightsand masses to get a center of gravity and weightfor the boat,” says Scherer. “This allows us to adjustengine position to control the plane of the yachtand achieve an optimum running angle.”With Alias, Viking can make changes to surfaces up to 40 times faster.Viking is also using the finite element analysis (FEA) capabilities in Autodesk Inventor Professional to minimize the weight of some components. “Running stress analysis on our projects helps identify areas where we may be able to trim weight,” says Bender. “Every pound we drop contributes to boat performance.”Managing Data Effectively with Vault ManufacturingViking had struggled with data management for some time, with the engineering department devot i ng significant time to finding drawings for sales and service personnel. “It was clearly time to solve our data management problem, so we turned to Autodesk Vault Manufacturing,” says Scherer. Autodesk Vault Manufacturing software securely stores and manages data in a central location, helping teams quickly create, share, and reuse digital prototyping information. “Vault Manufacturing keeps track of our data,” says Bender. “So even our sales and service people can find the informationthey need.”In addition, Vault Manufacturing is secure and closely controls versions of designs. “In the past, we struggled to track the latest files,” explains Bender. “Now, the files are located in one place, and everyone must check drawings in and out. There may be 100 versions of one file, but we all know which is the most up-to-date.”“We love using Vault Manufacturing,” adds Bender. “It’s a whole new world—and it’s cut our data manage m ent time in half.”Sharing Visualizations with ShowcaseTo bring digital prototypes to life, Viking uses Autodesk Showcase visualization software. The company no longer spends hours enhancingren d erings with graphic design software; it can now quickly create lifelike visualizations directly from digital prototypes.The company is developing its own environments in Showcase, so it can show the boats as they will appear in the water. “Customers can view our models as they will look in the New Jersey basin or the tropics,” says Scherer. “We can zoom around the boat and use the output to make a movie. Our marketing team is really excited about Showcase because it adds wow to their efforts. They even say you can smell the salt air!”Scherer points to the ambient occlusion feature thatproduces realistic shadows as critical to creatinga lifelike visualization. “With other renderingpackages, you just don’t get that kind of realism,” hesays. “Showcase really gets it right.”Viking also benefits from the seamlessinteroper a bility between Showcase and Alias.Before, Viking had to redo renderings every timethere was a change to the digital model. Now, whenchanges are made to a design, Viking can simplyload the new Alias model into Showcase and thevisualization updates automatically. “We’re savingso much time, it’s unbelievable,” says Scherer.The ResultWith its all-Autodesk digital pipeline, everyone atViking is able to work off a single digital model.“Collaboration is so much easier, and our Autodesksolution helps us achieve faster design times andfewer errors,” says Bender. “It’s even helping oursupplier relationships. Instead of our suppliersviewing a demo boat, we can send them digitalfiles to design around. That means they can getparts done faster so they’re less likely to hold upproduction.”Autodesk Inventor is speeding up the design cycleby automating many manual tasks and allowingViking’s designers to reuse standard components.Synergis EngineeringDesign Solutions, anAutodesk PremierSolutions Provider,has helped Vikingmake the transitionto the most advancedAutodesk software.“They’ve supported usvery well with softwareimplementationsand training,” saysKurt Bender. “TheSynergis team is bothknowledgeable andvery helpful. The Vikingemployees they’ve trainedhave nothing but positivefeedback.”Images courtesy of Viking Yacht Company.Autodesk, Alias, Autodesk Inventor, Inventor, and Showcase are registered trademarks or trademarks of Autodesk, Inc., and/or its subsidiaries and/or affiliates in the USA and/or other countries. All other brand names, product names, or trademarks belong to their respective holders. Autodesk reserves the right to alter product and services offerings, and specifications and pricing at any time without notice, and is not responsible for typo-graphical or graphical errors that may appear in this document. © Autodesk, Inc. All rights reserved.—Jamie Scherer CAD DesignerViking Yacht CompanyThe company’s ground-breaking flagship, an 82-foot yacht, was released in January of 2009. Utilizing the Autodesk digital workflow had a tremendous impact on this project’s design cycle and success. “Without a doubt, the Autodesk solution allows us to design and manufacture at the speed of thought.” says Bill Hall who works with tooling design and engineering at Viking.Most importantly, Viking’s move to Digital Prototyping has reduced the need for costlyphysical prototypes. “Now that we’re using Inventor to simulate real-world conditions, we don’t need full-scale physical prototypes,” says Bender.“We’re doing design reviews and marketing using renderings. It’s saving us substantial time andmoney on each boat design, which is critical in this economy.”For More InformationTo find out more about how you can create better designs faster with the Autodesk solution for Digital Prototyping, visit /commercial-recreational-transportation.Inventor speeds up Viking’s design cycle by automating many manual tasks.。
奇思妙想高速发射器英语作文
奇思妙想高速发射器英语作文English Answer:The Whirling Wonder High Velocity Launcher (WW-HVL) isa groundbreaking engineering marvel that combines the principles of centrifugal force, electromagnetic propulsion, and aerodynamic design to achieve unparalleled projectile velocities. It epitomizes the pinnacle of human ingenuity and innovation in the realm of projectile launch systems.The WW-HVL harnesses the centripetal force generated by a rotating arm to propel projectiles with exceptional speed and accuracy. The arm, powered by an advanced magnetic levitation system, spins at astonishing speeds, creating a centrifugal force that propels the projectile outward. This centrifugal force is precisely controlled and calibrated to ensure optimal projectile acceleration and velocity.In addition to the centrifugal force, the WW-HVL incorporates electromagnetic induction technology tofurther enhance projectile speed. A series of electromagnetic coils strategically positioned along the launch path generate a powerful magnetic field thatinteracts with the projectile's conductive material. This interaction creates an electromagnetic force that propelsthe projectile forward, complementing the centrifugal force.Aerodynamic design plays a pivotal role in maximizingthe WW-HVL's performance. The projectiles are meticulously engineered with streamlined bodies that minimize air resistance and optimize airflow. The launcher's trajectoryis precisely calculated to leverage the laws of aerodynamics, ensuring that the projectile follows a parabolic path with minimal deviation.The WW-HVL boasts an impressive array of features that make it an unparalleled projectile launch system. Its high velocity capability enables projectiles to reach speeds exceeding Mach 10, providing scientists and researcherswith unprecedented opportunities for studying hypersonic phenomena. Its precision firing mechanism ensures pinpoint accuracy, making it ideal for applications where precisetarget engagement is paramount.Furthermore, the WW-HVL is highly versatile and can accommodate projectiles of varying sizes and weights. This versatility makes it suitable for a wide range of applications, including research and development, military defense, and space exploration. Its modular design allows for easy customization and reconfiguration, enabling scientists and engineers to tailor the launcher to specific experimental or operational requirements.The WW-HVL stands as a testament to human ingenuity and the tireless pursuit of scientific advancement. Its unique combination of centrifugal force, electromagnetic propulsion, and aerodynamic design provides unmatched projectile velocities and precision, opening up new frontiers in research, defense, and space exploration.中文回答:旋风奇想高速发射器。
小学上册第2次英语第4单元全练全测(含答案)
小学上册英语第4单元全练全测(含答案)英语试题一、综合题(本题有100小题,每小题1分,共100分.每小题不选、错误,均不给分)1.The ______ (蓝鲸) is known to be the largest animal ever.2.The stars are _____ (twinkling/shining) in the night sky.3.What do you call a story that teaches a lesson?A. FableB. NovelC. BiographyD. Mystery答案:A4.What do you call the act of moving your body to music?A. DanceB. SingC. JumpD. Run答案: A5.I saw a _____ (豹子) at the wildlife sanctuary.6.The __________ is a famous area known for its outdoor activities.7.The _______ of an object can be calculated using its dimensions.8.The _______ of a wave can be visualized using a wave simulation.9.The duck swims in the _______ (湖).10.The turtle can live for _______ (许多年).11.She is _______ (在读书).12. A _____ (植物保育计划) can restore habitats for wildlife.13.I have a _____ (电话) in my bag.14. A small ___ (小虾) swims in the ocean.15.In ancient Egypt, pharaohs were considered ______ (神) and were buried in pyramids.16.Trees can live for many ______, sometimes even thousands of years. (树木可以活很多年,有时甚至上千年。
ls-dyna碰撞例子
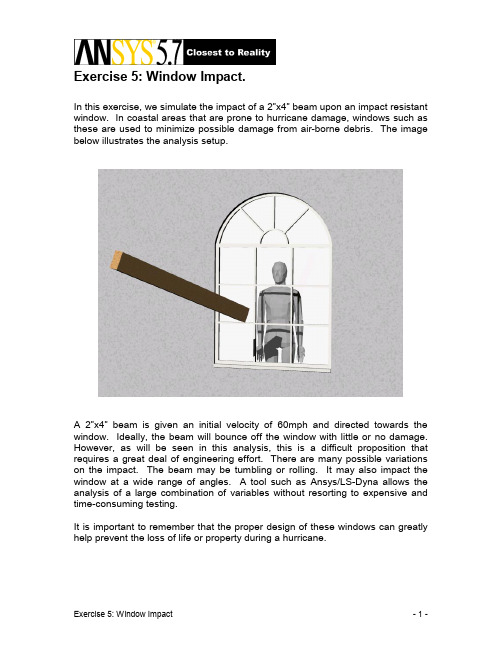
Exercise 5: Window Impact.In this exercise, we simulate the impact of a 2”x4” beam upon an impact resistant window. In coastal areas that are prone to hurricane damage, windows such as these are used to minimize possible damage from air-borne debris. The image below illustrates the analysis setup.A 2”x4” beam is given an initial velocity of 60mph and directed towards the window. Ideally, the beam will bounce off the window with little or no damage. However, as will be seen in this analysis, this is a difficult proposition that requires a great deal of engineering effort. There are many possible variations on the impact. The beam may be tumbling or rolling. It may also impact the window at a wide range of angles. A tool such as Ansys/LS-Dyna allows the analysis of a large combination of variables without resorting to expensive and time-consuming testing.It is important to remember that the proper design of these windows can greatly help prevent the loss of life or property during a hurricane.The mesh used in this example is illustrated below.Summary of Steps:1. Launch Ansys/LS-Dyna1.1. Launch ANSYS using your Start menu2. Setup2.1. Resume Database2.2. Set LS-Dyna Preferences2.3. Plotting Controls2.4. Define Element Types2.5. Define Real Constants3. Material Properties3.1. Linear Elastic Properties for Wall3.2. Plastic Kinematic Plasticity Model for Window Frame3.3. Plastic Kinematic Plasticity Model for Plexiglass3.4. Linear Elastic Properties for 2”x4” Wooden Beam3.5. Rigid Material Properties for Floor3.6. Rigid Material Properties for Crash Dummy4. Loads4.1. Define 2”x4” Wooden Beam Nodal Component4.2. Apply Initial Velocity to 2”x4” Wooden Beam5. Constraints5.1. Apply Constraints to Edges of Wall and Floor6. Contact Definition6.1. Define Automatic General Contact6.2. Define Wall Tie Surface Component6.3. Define Window Tie Surface Component6.4. Define Tied Surface-to-Surface Contact7. Solution Controls7.1. Time Controls7.2. Output Controls7.3. Analysis Controls7.4. Save Model7.5. Solution Monitoring7.6. Solve Model8. General Post-Processing8.1. Plot Setup8.2. Stress Plot9. Generate HTML Report9.1. Image Capture and Animation Generation9.2. Report Assembly10. Conclusions10.1. Exit AnsysStep-by-Step Instructions:Before we begin this problem, create a separate folder on your computer for this analysis and copy the ANSYS database window.db from the CD into this folder.1. Launch ANSYS/LS-Dyna1.1. Launch ANSYS using your Start MenuA. Browse to select the working directory were you placed thewindow.db file for this job.B. Enter window for the job name. All subsequent ANSYS files createdfor this problem will have a filename of window followed by a uniqueextension.C. Change the workspace and database sizes for this job to 384 and 128respectively.D. Click RUN to start ANSYS1.1.B1.1.C1.1.D2. Setup2.1. Resume DatabaseA. We are going to start with an ANSYS database that has already beenmeshed for you. This database contains the geometry of the window, wall, and beam as well as their constitutive elements and nodes. B. Resume Jobname.db ANSYS will read in the predefined databasewindow.db and plot the model in the graphics window.2.2. Set LS-Dyna PreferencesA. In the ANSYS main menu, pick Preferences…B. LS-Dyna ExplicitC. OK2.3. Plotting ControlsA. Use the Pan/Zoom/Rotate function to examine all parts of the modelas done in previous exercises. In the Utility menu, select PlotCtrlsB. Pan, Zoom, Rotate… This will activate the view control window.C. It is useful to keep this window active at all times.2.2.B2.2.CPan Zoom Rotate Functions:2.4. Define Element TypesThe wall and beam have been modeled using 8 noded bricks and the window, crash dummy, and floor have been modeled using shell elements. Thus, the SOLID164 (brick) and SHELL163 (shell) explicit element types are appropriate for this problem. As this example was pre-meshed, these element types are already defined. To review the element types in the modelA. In the Preprocessor menu, select Element TypeB. From this dialog box, it is possible to Add additional element types,Edit the existing types, or Delete defined types.C. For this case no modification is required. Click Close2.4.C2.5. Define Real ConstantsThe SOLID164 elements require no real constants. However, the SHELL163 elements require real constant input.A. In the Preprocessor menu, select Real Constants…B. In the Real Constants dialog box, click on Add…C. In the Element Type for Real Constants , highlight Type 2 or 100.Note that it does not make a difference as both element type 2 and 100 reference Real constant set 1. Therefore, as this is set 1, the values input will be used by both element types. Click OK D. Input 5/6 for the Shear FactorE. Input 4 for the No. of integration pts.F. Input 0.125 for the Thickness at node 1G. Click OK. Note that ANSYS will default to using 0.125 for all fournodes if only the first value is input.H. Close the Real Constants dialog box by clicking Close2.5.G3. Material Properties3.1. Linear Elastic Properties for WallA. In the Preprocessor menu, select Material PropsB. Define MAT Model…C. In the Material Models dialog, click Add…D. Enter 1 for the Material NumberE. Highlight Linear Elastic and IsotropicF. Click OK3.1.D3.1.FG. In the Define Material Model dialog, enter 0.00031055 for DensityH. Enter 10e6 for Young’s modulusI. Enter 0.3 for the Poisson’s RatioJ. Click OK3.1.J3.2. Plastic Kinematic Plasticity Model for Window Frame A. Click Add…B. Enter 2 for the Material NumberC. Highlight Plasticity and Plastic KinematD. OKE. Enter 0.00022345 for DensityF. Enter 10e6 for Young’s modulusG. Enter 0.3 for Poisson’s RatioH. Enter 50000 for Yield StressI. Enter 200000 for Tangent ModulusJ. Enter 0.3 for Failure strainK. OK3.2.B3.2.C3.2.D3.2.K3.3. Plastic Kinematic Plasticity Model for Plexiglass A. Click Add…B. Enter 3 for the Material NumberC. Highlight Plasticity and Plastic KinematD. OKE. Enter 0.00024120 for DensityF. Enter 20e6 for Young’s modulusG. Enter 0.3 for Poisson’s RatioH. Enter 120000 for Yield StressI. Enter 280000 for Tangent ModulusJ. Enter 0.115 for Failure strainK. OK3.3.B3.3.C3.3.D3.3.K3.4. Linear Elastic Properties for 2”x4” Wooden Beam A. Click Add…B. Enter 4 for the Material NumberC. Highlight Linear Elastic and IsotropicD. Click OKE. In the Define Material Model dialog, enter 0.00032349 for DensityF. Enter 7e6 for Young’s modulusG. Enter 0.3 for the Poisson’s RatioH. Click OK3.4.B3.4.D3.4.H3.5. Rigid Material Properties for Floor A. Click Add…B. Enter 5 for the Material NumberC. Highlight Other and RigidD. Click OKE. In the Define Material Model dialog, enter 0.00038819 for DensityF. Enter 10e6 for Young’s modulusG. Enter 0.3 for the Poisson’s RatioH. Click OKI. Click Close to exit the Defing MAT Model dialog.3.5.B3.5.C 3.5.D3.5.H3.6. Rigid Material Properties for Crash Dummy A. Click Add…B. Enter 6 for the Material NumberC. Highlight Other and RigidD. Click OKE. In the Define Material Model dialog, enter 0.00038819 for DensityF. Enter 10e6 for Young’s modulusG. Enter 0.3 for the Poisson’s RatioH. Click OKI. Click Close to exit the Defing MAT Model dialog.3.6.B3.6.C 3.6.D3.6.H4. Loads4.1. Define 2”x4” Wooden Beam Nodal Component A. In the ANSYS Utility menu, pick Select B. Entities…C. In theSelect Entities dialog box, select Nodesand By Num/Pick D. Click OK4.1.DE. In the Pan-Zoom-Rotate dialog (discussed in section 2.3), select aRight view and Fit the view to the model.F. In the Select nodes dialog box, highlight the Box option.G. Draw a box around the wooden beam by clicking and dragging.H. Once all of the nodes in beam are selected, click OKI. Return to the ANSYS Utility menu and pick Select J. Comp/Assembly K. Create Component4.1.HL. Enter beam for the component name.M. Select Nodes as Entity component is made ofN. Click OKO. Return again to the ANSYS Utility menu and pick Select P. Everything4.2. Apply Initial Velocity to 2”x4” Wooden Beam Nodal ComponentA. In the Preprocessor menu, select LS-DYNA OptionsB. Initial VelocityC. w/Axial Rotate…D. In the Generate Velocity dialog, select the BEAM component to applythe initial velocity.E. Enter -10 for the VX Global X-componentF. Enter -10 for the VY Global Y-componentG. Enter –1056 for the VZ Global Z-componentH. Leave all other options set to 0I. Click OK4.2.D4.2.E-G 4.2.I5. Constraints5.1. Apply Constraints to Edges of Wall and FloorA. In the Pan-Zoom-Rotate dialog (discussed in section 2.3), select aFront view and Fit the view to the model B. In the Preprocessor menu, select LS-DYNA Options C. Constraints D. Apply E. On NodesF. In the Apply U,Rot on Nodes dialog, highlight the Box optionG. Draw boxes on each side of the wall and floor to select the edge nodes. See the following elment plot figure. H. Click OKI. In the Apply U,ROT on Nodes dialog, highlight the UX, UY, and UZDOFs to be constrainedJ. Select Constant Value for the Apply as option and enter 0 as a Value K. OK5.1 G5.1.I5.1.J5.1.K6. Contact Definition6.1. Define Automatic General ContactA. In the LS-Dyna Options menu, select ContactB. Define ContactC. Highlight Single Surface and Auto Gen’l (AG)D. Click OK6.1.DE. Click OK again.6.2. Define Wall Tie Surface Component A. In the ANSYS Utility Menu, click Select B. Entities…C. In the Select Entities dialog, highlight Elements , By Attributes , andMaterial num6.1.ED. Enter 1,1,1 for Min, Max, IncE. Click ApplyF. In the Select Entities dialog, highlight Nodes , Attached to , andElements G. Click Plot H. Click OKI. In the Pan-Zoom-Rotate dialog, select a Front view and FitJ. Return to the Select menu in the ANSYS utility menu and click Entities… K. In the Select Entities dialog, highlight Nodes , By Num/Pick , andReselect and click OK L. In the Select Node dialog, enable Polygon picking and select the nodes in the window frame. M. Click OK6.2.GN. In the ANSYS Utility menu, click Select O. Comp/Assembly P. Create Component…Q. Enter Wallfrm for the Component Name R. Click OK6.3. Create the Window Frame Tie Surface Component A. In the ANSYS Utility Menu, click Select B. Entities…C. In the Select Entities dialog, highlight Elements , By Attributes , andMaterial num D. Enter 2,2,1 for Min, Max, Inc E. Click ApplyF. In the Select Entities dialog, highlight Nodes , Attached to , andElementsG. Click Plot H. Click OKI. In the Pan-Zoom-Rotate dialog, select a Front view and Fit6.3.GJ. Return to the Select menu in the ANSYS utility menu and click Entities…K. In the Select Entities dialog, highlight Nodes, By Num/Pick, and Reselect and click OKL. In the Select Node dialog, enable Polygon picking and select the nodes in the window frame. M. Click OKN. In the ANSYS Utility menu, click Select O. Comp/AssemblyP. Create Component…Q. Enter Winfrm for the Component Name R. Click OK6.3.R6.4. Create Tied Surface-to-Surface ContactA. In the Preprocessor menu, click on LS-DYNA OptionsB. Define ContactC. In the Contact Parameter Definitions dialog, highlight Surface to Surf and TiedD. Click OK6.4.DE. In the Contact Options dialog, select Winfram for ContactComponent and Wallfram for the Target ComponentF. Click OKG. In the ANSYS Utility menu, click Select and Everything6.4.F7. Solution Controls7.1. Time ControlsA. Under the Ansys Main Menu, select SolutionB. Time ControlsC. Solution Time…D. For the termination time, enter 0.5E. OK7.2. Output ControlsA. In the Solution menu, click Output ControlsB. File Output FreqC. Time Step Size…7.1.D7.1.ED. Enter 1e-02 for Result File Output Interval and Time-History OutputInterval E. Enter 1.0 for Restart Dump Output Interval F. OK7.3. Analysis OptionsNo modifications to default ANSYS analysis options are required for this analysis. 7.4. Save ModelA. In the Ansys Utility menu, select FileB. Save as Jobname.db 7.5. Solution InstructionsA. In the Solution menu, select SolveB. OKC. Click Yesin the verification dialog7.2.D7.2.E 7.2.F7.6. Solution MonitoringA. LS-Dyna will open a window to run the analysis. In this window bypressing Ctrl+C, it is possible to monitor the solution process. After hitting Ctrl+C and entering sw1, sw2, sw3, or sw4, LS-Dyna will respond according to the table below. B. Sw2 is particularly useful. Hitting Ctrl+C and entering sw2 will causeLS-Dyna to respond with time, energy, and remaining solution time. C. Sw1 allows an analysis to be terminated. LS-Dyna will write results atthe time point at which it stops.7.5.B7.5.C8. General Post-Processing8.1. Plot SetupA. Now that we have completed the analysis, it is necessary topostprocess the results. This is accomplished by going into the Ansys General Postprocessing module. Pick General Postproc from the Ansys Main menu. B. Once in the Postprocessor module, we need to tell Ansys what file topostprocess. Click Data and File Opts… C. All Items D. window.rst E. Click OK8.1.C 8.1.D 8.1.EF. Now we need to specify a results set to read into Ansys. SelectResults Summary from the General Postproc menu. G. Highlight step 12 H. Read I. Close8.1.H8.1.I。
2024届广西壮族自治区广西贵港市、百色市、河池市高三上学期三模联考英语试题(3)

2024届广西壮族自治区广西贵港市、百色市、河池市高三上学期三模联考英语试题(3)一、听力选择题1.A.Teacher and student.B.Policeman and robber.C.Doctor and patient.D.Landlord and tenant.2. What’s the woman’s opinion towards building the school?A.It is not a good timing to build it.B.It should have been built earlier.C.She is curious about this plan.D.She doubts how long the plan will take.3. How many languages are there in Google Translate?A.133.B.157.C.300.4.A.Narrow down his theme.B.Revise his paper carefully.C.Focus on the paper.D.Cover more topics.5.A.Give up the game.B.Make a new plan.C.Have tough training.D.Avoid the opponent.二、听力选择题6. 听下面一段较长对话,回答以下小题。
1. What does the man do in the supermarket?A.Deal with shelves.B.Work at the cash desk.C.Handle customers’ complaints.2. How long has the man worked in the supermarket?A.For one week.B.For two weeks.C.For three weeks.3. What does the woman advise the man to do?A.Change his job.B.Seize every chance.C.Apologize to the boss.7. 听下面一段较长对话,回答以下小题。
气密舱放气最小载荷对疲劳试验运行时间的影响

·18·
《测控技术》2020 年第39 卷第4 期
由于气体相比于液压油更易被压缩,气体压力的 典型的气密舱放气过程如下:安装在气密舱上的
建立速度低于液压油压力的建立速度,因此相较于力 压力传感器,实时测量气压反馈信号,并将该信号送往
控加载,全机疲劳试验过程中,气密舱充放气加载速度 协调加载控制系统;控制系统根据当前反馈与指令的
由图5 可以看出,压力变化率与图4 阀开度趋势紧 密相关,压力变化率在1.294 s 前缓慢增加,放气速度不 断加快;1.294 s 后,由于阀开度达到最大后不再增加, 随着气密舱内部压力的降低,放气速度也不断降低,直 至放气末端压力接近最小载荷时,压力变化率达到最小。
块的方式进行仿真分析。
建模 3 Simulink
图1 气密舱充放气原理及过程
气密舱放气仿真模型采用Simulink 搭建,如图2 所示,模型中包含4 个模块。其中,误差模块用于计算 误差并根据设置精度情况终止仿真过程;控制模块采
气密舱放气最小载荷对疲劳试验运行时间的影响 用PIDF(比例- 积分- 微分- 前馈)控制器,根据协调 加载控制系统控制方法,积分参数设置积分限,限制积 分在控制通道输出信号中所占比例;比例阀开度模块 用于实时计算放气阀开口面积,包括指令信号与电压 信号的转换环节及指令饱和环节;反馈计算模块根据 式(7)实时计算气密舱内部剩余气体压力,作为反馈 送往误差模块。
全机疲劳试验能够发现和暴露结构设计中存在的 为主,载荷谱中包含大量空中机动工况,同时由于歼强 薄弱部位,为制订维修大纲及持续改进提供有力支撑, 类飞机每次飞行任务不同、挂载不同,机动工况的排列 军用飞机结构强度规范和民用飞机适航规章都要求进 具有强随机性,因此其气密舱面临频繁且无规律的充 行全尺寸飞机疲劳试验[1-2]。歼强类飞机以机动飞行 放气过程。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
SPEEDING UP CALL CENTER SIMULATION AND OPTIMIZATION BY MARKOV CHAIN UNIFORMIZATION
ABSTRACT Staffing and scheduling optimization in large multiskill call centers is time-consuming, mainly because it requires lengthy simulations to evaluate performance measures and their sensitivity. Simplified models that provide tractable formulas are unrealistic in general. In this paper we explore an intermediate solution, based on an approximate continuous-time Markov chain model of the call center. This model is more accurate than the commonly used approximations, and yet can be simulated faster than a more realistic simulation (based on non-exponential distributions and additional details). To speed up the simulation, we uniformize the Markov chain and simulate only its discretetime version. We show how performance measures such as the fraction of calls of each type answered within a given waiting time limit can be recovered from this simulation, how to synchronize common random numbers in this setting, and how to use this in the first phase of an optimization algorithm based on the cutting plane method. We also discuss various implementation issues and provide empirical results. 1 INTRODUCTION
Telephone call centers, and more generally contact centers where mail, fax, e-mail, and Internet contacts are handled in addition to telephone calls, are important components of large organizations (Aks ¸in, Armony, and Mehrotra 2007, Gans, Koole, and Mandelbaum 2003). Specifying the number and types of agents who handle the calls, and the working schedules of these agents, under constraints on the quality of service and on admissible schedules, is one of the main optimization problems encountered in managing these centers. Large call centers are complex stochastic systems that can be analyzed realistically only by simulation; tractable queueing models oversimplify reality and are not very reliable. When simulation is combined with an optimization algorithm, its
efficiency is a key issue, because optimization often requires thousands of simulation runs at different parameter settings (Cez ¸ ik and L’Ecuyer 2008, Avramidis, Gendreau, L’Ecuyer, and Pisacane 2007b, Avramidis, Gendreau, L’Ecuyer, and Pisacane 2007a). A common workaround for this problem is to use approximation formulas during the first steps of the optimization process, and then refine the solution using simulation. However, these approximations are so rough for complex models with multiple types of calls and agents that they may lead to highly-suboptimal or even infeasible solutions (Avramidis, Chan, and L’Ecuyer 2008). One possible compromise, explored in this paper, is to model the system as a continuous-time Markov chain (CTMC) that can be simulated faster than a detailed (more realistic) discrete-event simulation model. Speedup can be achieved by uniformizing the CTMC and simulating only the embedded discrete-time Markov chain (DTMC) instead of the CTMC. Simulation must be used because this chain has an enormous complicated state space and evolves in non-stationary mode. The uniformization often increases the average transition rate significantly if done in straightforward way, and this could wipe out the performance gain, but our implementation uses an adaptive state-dependent uniformization scheme that addresses this issue. For each realization of the DTMC, performance measures are estimated by computing their conditional expectation given the DTMC and its number of steps. This quick (simplified) simulation model is used in the first stage of a staffing optimization procedure, whose second stage uses detailed simulation of a more realistic model for fine tuning of the solution. We give illustrations for a multiskill center over a single time period. The technique can be extended to cover multiple periods with different parameters. The rest of the paper is organized as follows. The next section provides a brief description of multiskill call centers and the staffing optimization problem in these centers. Section 3 explains how a CTMC can be simulated efficiently over a finite horizon by simulating the embed-
Eric Buist Wyean Chan Pierre L’Ecuyer D´ epartement d’Informatique et de Recherche Op´ erationnelle Universit´ e de Montr´ eal, C.P. 6128, Succ. Centre-Ville Montr´ eal (Qu´ ebec), H3C 3J7, CANADA