基于定向二维插值的逆投影变换方法
迭代反向投影法

迭代反向投影法
迭代反向投影法是计算机视觉中一种用于重建二维图像的算法。
它的基本思想是从一组二维投影数据中推算出原始二维物体的信息。
首先,将物体沿不同方向进行投影,得到一组二维投影数据。
然后,根据投影数据的数学原理,可以得到物体的一些特征信息,比如它在不同方向上的透射率。
接下来,将这些特征信息反向投影回原始二维物体上,从而可得到物体各部分点的亮度值。
该过程可以反复迭代,直到得到最终的图像重建结果。
迭代反向投影法是计算机视觉中一种被广泛应用的图像重建方法,它在医学成像、机器人视觉等领域都有着重要的应用。
opencv仿射变换和逆变换
opencv仿射变换和逆变换
OpenCV中的仿射变换和逆变换是图像处理中常用的技术,可以
用于图像的旋转、缩放、平移和倾斜等操作。
首先,让我们来谈谈
仿射变换。
仿射变换是一种线性变换,可以通过矩阵运算来实现。
在OpenCV中,可以使用`warpAffine`函数来进行仿射变换。
该函数接
受输入图像、仿射变换矩阵以及输出图像的大小作为参数。
仿射变
换矩阵是一个2x3的矩阵,其中包含了旋转、缩放和平移的参数。
通过调整这些参数,可以实现对图像的各种变换操作。
接下来是逆变换。
在图像处理中,有时候我们需要对图像进行
逆变换,即将已经进行过变换的图像恢复到原始状态。
在OpenCV中,可以使用`invertAffineTransform`函数来实现仿射变换的逆变换。
这个函数接受一个2x3的仿射变换矩阵作为输入,并返回其逆矩阵。
通过将逆矩阵应用到已经变换过的图像上,可以实现对图像的逆变
换操作。
需要注意的是,仿射变换和逆变换是基于几何变换的,因此在
进行变换操作时需要考虑图像的边界处理、插值方法等问题,以确
保变换后的图像质量和准确性。
总的来说,OpenCV中的仿射变换和逆变换是非常实用的图像处理技术,可以帮助我们实现图像的各种几何变换操作,并且通过逆变换可以实现对图像的恢复操作。
在实际应用中,可以根据具体的需求和场景,灵活运用这些技术来实现图像处理和分析任务。
反投影重建算法

反投影重建算法介绍反投影重建算法是一种常用于医学图像重建的技术,它通过将多个投影图像反向投影到空间中,来重建出原始物体的三维形态。
该算法基于X射线摄影和计算机图形学的理论,被广泛应用于医学成像领域,尤其是计算机断层扫描(CT)。
基本原理反投影重建算法的基本原理是通过测量某物体在不同角度下的投影数据,然后将这些数据反向投影到空间中,得到物体的三维重建图像。
具体步骤如下:1.采集投影数据:使用X射线或其他成像设备,获得物体在不同角度下的投影数据。
这些投影数据可以通过测量X射线的衰减程度来获取。
2.投影数据的逆变换:将投影数据的方向进行反转,得到反投影数据。
这一步是算法中最重要的一步,它将每个测量点的投影数据映射回三维空间。
3.反投影重建:将反投影数据从二维空间转换为三维空间。
这可以通过将反投影数据相加来实现。
在这个过程中,需要注意对数据进行插值,以确保重建图像的精确度。
算法细节反投影重建算法的具体细节有多种实现方式,下面列举几种常见的算法:1. 直接反投影算法直接反投影算法是一种最简单的算法,它将每个投影像素直接投影回三维空间。
具体步骤如下:1.对每个投影像素点,计算它在三维空间中的坐标。
这可以通过测量点在投影平面上的位置和投影矩阵来实现。
2.将每个投影像素点的坐标值累加到三维空间的相应位置上。
这一步是反投影的核心过程,通过将每个像素点的坐标值相加,最终可以得到物体的三维重建图像。
3.可选的后处理步骤:根据需要,可以对重建图像进行滤波、增强或其他处理,以提高图像的质量。
2. 迭代反投影算法迭代反投影算法是一种更复杂但更精确的算法,它通过多次迭代求解,逐渐优化重建图像的质量。
具体步骤如下:1.初始化重建图像:将重建图像的像素初始化为某一固定值。
2.迭代求解:重复以下步骤,直到算法收敛或达到最大迭代次数:–计算投影数据的理论值:根据当前重建图像,计算预测的投影数据。
–计算误差:比较预测的投影数据与实际测量数据之间的差异,得到误差。
halcon中的仿射变换逆变换

一、简介Halcon是一种功能强大的机器视觉软件,广泛应用于工业自动化、医疗影像、安防监控等领域。
在Halcon中,仿射变换是一种常见的图像处理技术,用于实现图像的旋转、缩放、平移等操作。
二、仿射变换的基本原理1. 仿射变换是一种线性变换,可以通过矩阵运算来描述。
给定一个二维坐标系下的点P(x, y),经过仿射变换后,其坐标变为P'(x', y'),可以表示为:x' = a*x + b*y + cy' = d*x + e*y + f其中a、b、d、e为线性变换矩阵的元素,c、f为平移向量的偏移量。
2. 仿射变换可以实现图像的平移、旋转、缩放、错切等操作,是图像处理中常用的技术之一。
三、 Halcon中的仿射变换1. 在Halcon中,可以通过使用affine_trans_image函数来实现图像的仿射变换。
该函数接受输入图像、变换矩阵以及插值方式等参数,可以对图像进行指定的仿射变换操作。
2. 通过设置不同的变换矩阵,可以实现图像的不同变换效果。
通过调整平移向量的偏移量,可以实现图像的平移操作;通过调整线性变换矩阵的元素,可以实现图像的旋转、缩放等操作。
3. Halcon还提供了inverse_affine_trans_image函数,用于实现仿射变换的逆变换操作。
通过逆变换,可以将经过仿射变换后的图像还原到原始状态,实现图像的修正和恢复。
四、仿射变换在机器视觉中的应用1. 仿射变换在机器视觉中具有重要的应用价值。
在工业自动化领域,通过对图像进行仿射变换,可以实现对产品进行检测、定位和识别;在医疗影像领域,可以通过仿射变换对医学图像进行修正和分析;在安防监控领域,可以实现对监控图像的处理和分析等。
2. 通过使用Halcon中的仿射变换技术,可以实现对图像的精准操作和处理,为机器视觉系统的性能和效果提供有力支持。
五、总结1. 仿射变换是图像处理领域常用的技术之一,通过线性变换和平移操作,可以实现图像的平移、旋转、缩放等操作。
潘晓川教授的反投影滤波(BPF)新型重建算法介绍
本文详细介绍了潘晓川教授为首的研究小组提出的 BPF 精确重建算法 以及 BPF 算法在锥
束 扇束 CT 重建中的应用 最后介绍了潘晓川等人提出的基于目标的感兴趣区域 ROI 的 BPF
成像策略
2 基于 PI 线的锥束螺旋 BPF 重建算法
2004 年 潘晓川等人提出了一种有别于 Katsevich 算法的精确锥束螺旋 CT 重建算法 该算 法的重建思想是建立在 PI 线的概念基础之上的 PI 线的概念最早是 1997 年由 Danielsson 等提出 的 在 PI 线的基础上 Danielsson 等提出了用于解决锥束螺旋 CT 近似重建的 PI 算法 PI 线的概
?在锥束螺旋ct精确重建理论中人们已经证明了精确重建螺旋线内的物体三维信息理论上需要的二维探测器上的最少投影数据包含在tamdanielsson窗内9tamdanielsson窗在一系列基于三维radon变换的锥束螺旋ct重建算法中起到了关键的作用katsevich的fbp形式的锥束螺旋ct精确重建算法也用到了tamdanielsson窗的概念但他的重建算法需要比tamdanielsson窗更多的投影数据才能够精确重建出物体的三维图像而潘晓川等人的bpf形式的锥束螺旋ct精确重建算法只需要二维探测器上tamdanielsson窗内的投影数据也就是说bpf重建算法仅仅需要理论上最少的投影数据就可以精确重建出螺旋轨道扫描范围内的物体三维图像这是bpf重建算法相对于其他算法的最重要的不同之处10r20r螺旋线扫描轨道pi线万方数据70ct理论与应用研究15卷根据潘晓川等人的文献bpf算法的重建过程步骤如下1对每个角度下的锥束投影数据进行求导??00rqrpqrqrg??1上式中0qr表示锥束源点轨道上的一个点q都是是该源点的角度坐标r表示从角坐标1到2的pi线上的任意一点?0rqrp表示在锥束源点0qr处的某条方向为?r的x射线穿过物体后的投影2由求导后的投影数据对螺旋轨道内每条pi线上的物体图像点进行加权反投影反投影积分的角度范围是该pi线对应的角度范围12?21?00rrgrrdrg2上式中0r表示锥束源点轨道上的一个点由公式2pi线上r点处的rg是由求导后的投影数据在12的角度范围内进行加权反投影得到的3对加权反投影得到的pi线上的数据沿着该条pi线求hilbert变换得到物体在该线上的重建结果??????????????cxdxgxxxxxxxxxxxfxx21121211212213上式中21x既是公式2中pi线上点r的另外一种表示形式c是沿着pi线方向的投影值1x2x代表pi线的两个端点4对螺旋轨道内所有pi线上的物体重建结果进行重采样得到物体的三维重建图像由公式3得到的是物体沿各条pi线上的采样图像一般情况下我们需要得到的是笛卡儿坐标系下均匀采样的物体三维图像因此需要对3中得到图像进行重采样例如在螺旋锥束ct重建中经过重采样的最终图像可以由下面公式得到21xfzyxf4????????1sinsin1coscos1212121thhtzttryttrx5其中10t2005年潘晓川等人在bpf算法的基础上提
逆投影原理

逆投影原理逆投影原理什么是逆投影原理?逆投影原理是一种重建二维或三维图像的技术。
它基于X射线计算机断层扫描(CT)的原理,通过逆运算来重建已知的投影数据。
逆投影原理被广泛应用于医学、工业、航空等领域,成为了非常重要的成像技术之一。
逆投影的基本概念在探测信号通过被测体后产生的投影数据中,我们只能获得被测对象在不同方向上的一维信息。
逆投影原理通过反向计算,将这些一维信息转化为二维或三维图像。
逆投影的数学原理逆投影原理基于Radon变换,将一维的投影数据转换为二维的图像数据。
逆投影的数学模型是一个积分方程,可以用迭代算法来求解。
逆投影的重建步骤1.数据采集:通过传感器或相机等设备获得被测对象的投影数据。
2.图像预处理:对采集的数据进行滤波和去噪处理,提高重建质量。
3.逆投影计算:根据投影数据和逆投影算法,计算出对应的图像数据。
4.图像重建:将计算得到的图像数据转化为可视化的图像。
逆投影应用逆投影原理被广泛应用于各种领域。
在医学领域,逆投影可以用于构建CT扫描图像,帮助医生准确诊断疾病。
在工业领域,逆投影可以用于检测材料的缺陷和测量尺寸。
在航空领域,逆投影可以用于飞机的非破坏性检测。
总结逆投影原理是一种重建图像的技术,通过逆运算将一维投影数据转化为二维或三维图像。
它的数学原理是基于Radon变换的积分方程,可以通过迭代算法求解。
逆投影在医学、工业、航空等领域有着广泛的应用。
通过逆投影原理,我们可以获得更准确的图像数据,帮助我们进行更精确的分析和判断。
逆投影算法的优化逆投影算法在计算过程中可能存在一些问题,例如数据噪声、幅度不匹配、伪影等。
为了提高逆投影的质量和精度,研究者们提出了一些优化方法。
1.滤波技术:在逆投影计算过程中,对投影数据进行滤波处理可以降低噪声的影响,提高图像质量。
常用的滤波方法有低通滤波、中值滤波等。
2.线性化技术:将非线性的逆投影问题转化为线性问题,可以简化计算过程。
例如,利用四ier切片定理和滤波反投影定理,可以将逆投影过程分解为两个步骤:滤波和反投影。
逆透视变换原理

逆透视变换原理
透视变换是指将三维空间的物体映射为二维平面上的图像,而逆透视变换是将二维平面上的图像恢复为三维空间中的物体。
它的原理在于针孔相机模型,即假设光线从物体经过针孔进入相机中,形成的图像就只能是二维平面上的了,而逆透视变换就是通过对这个平面上的图像进行处理,来还原出原来的三维物体。
逆透视变换的实现过程一般包括以下几个步骤:
1. 确认变换矩阵。
逆透视变换矩阵包括相机内参矩阵和相机外参矩阵,需要通过摄像机的参数进行计算出来。
2. 对输入图像进行处理,比如去除畸变。
3. 通过将图像上的点坐标乘以逆透视变换矩阵,得到物体上的点坐标。
4. 对得到的三维物体进行滤波、表面重建等处理,得到最终的三维模型。
逆透视变换常用于计算机视觉和机器人领域中,例如用于计算物体深度、姿态、形状等,或者用于机器人的自主导航和定位等。
但需要注意的是,逆透视变换只能对透视变换后的图像进行还原,对于其他投影方式的图像如正射投影等是无法应用的。
动态图像逆透视映射方法在路面图像拼接中的应用
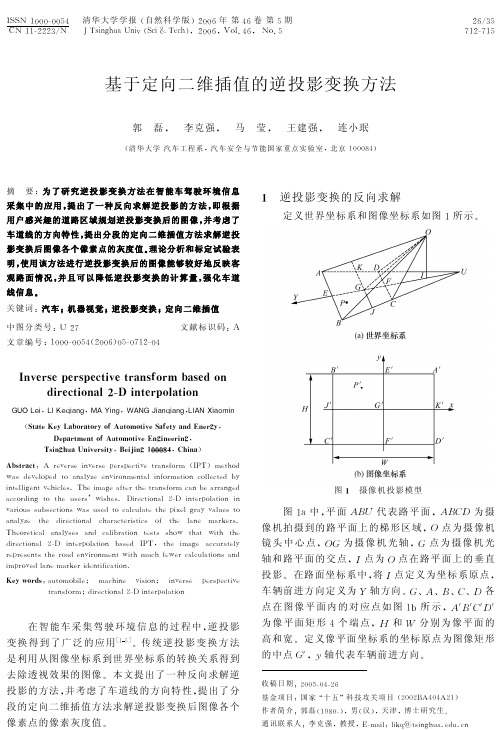
Application of Dynamic Inverse Perspective Mapping in Road Surface Image Mosaic CAO Yu FENG Ying WEI Lian LEI Bing WANG Yanhui 动态图像逆透视映射方法在路面图像拼接中的应用曹毓冯莹魏立安雷兵王彦辉国防科技大学光电科学与工程学院,长沙410073摘 要:目前广泛使用的车载路面图像逆透视映射方法均假定相机姿态角是恒定的。
车辆行进中的颠簸会使得相机姿态发生变化,由此导致现有方法获得的路面俯视图出现较大误差。
为此,本文使用姿态传感器实时测量相机姿态,利用相机姿态角数据计算出相机相对路面的逆透视映射关系矩阵,从而获得了高精度的路面俯视图。
实验测试结果表明,在相机任意姿态角下,由该方法获得的俯视图其逆透视映射误差不超过0.8%。
室外动态颠簸状况下的路面图像拼接实验表明,和传统方法相比,该方法获得的路面俯视图失真较小。
因此,改进后的方法可在相机处于颠簸条件下获得高精度的路面俯视图,可应用于机场跑道异物快速检测和公路路面病害勘测等领域。
图像拼接;逆透视映射;相机姿态测量;跑道异物检测;路面病害勘测TP391.4A1004-1699 ( 2011 ) 11-1658-05总后勤部预研项目2011-07-052011-08-20IPM算法表中并未随后,根据@@[1]郑榜贵,田炳香,段建民.基于Kalman预测及逆投影的车道识 别技术[J].计算机工程与设计,2009,30(6):1548-1554.@@[2]袁启平,宋金泽,吴涛.基于逆透视映射的图像拼接方法[J]. 微计算机信息,2010,26(7-3):208-210.@@[3] Massimo Bertozzi, Alberto Broggi, GOLD: A Parallel Real-Time Stereo Vision System for Generic Obstacle and Lane Detection[ J]. IEEE Transactions on Image Processing,1998,7( 1 ) :62-81.@@[ 4 ] Massimo Bertozzi,Alberto Broggi,Alessandra Fascioli. Stereo Inverse Perspective Mapping: Theory and Applications [ J ]. Inage and Vision Computing, 1998,16:585 -590.@@[5]高德芝,郑榜贵,段建民.基于逆透视变换的智能车辆定位技 术[J].计算机测量与控制,2009,17(9):1810-1812.@@[6]付梦印,李博,王美玲.一种基于逆投影变换的智能车道路识 别方法[J].光学技术,2008,34(3):368-371.@@[7]曹毓,冯莹,杨云涛,等.基于灭点查找的姿态角测量方法在路而 三维重建中的应用[J].传感技术学报,2011,24(7):1081-1086.@@[8]江泽民,杨毅,付梦印.基于平行线的室内视觉导航[J].机器 人,2007,29(2):128-132.@@[9]戴斌,裘伟.逆透视投影下车道偏离时间的在线估计[J].计算 机工程与应用,2007,43(16):235-238.@@[10]郭磊,徐友春,李克强,等.基于单目视觉的实时测距方法研究 [J].中国图像图形学报,2006,11(1):74-81.@@[11]郭磊.基于定向二维插值的逆投影变换方法[J ].清华大学学 报(自然科学版),2006,46(5):712-715.@@[ 12 ] Sovira Tan,Jason L. Dale, Andrew Anderson,et al. Inverse Perspective Mapping and Optic Flow:A Calibration Method and a Quantitative Analysis[ J ]. Image and Vision Computing ,2006, (24) : 153-165.@@[13] SHU Y, Tan A. Vision Based Lane Detection in Autonomous Vehicle[ J ]. proceedings of the 5th world Congress on Intelligent Control and Automation. 2004, Hangzhou, P. R. China.@@[14]邓剑文,安向京,贺汉根.基于道路结构特征的自主车视觉导 航[J].吉林大学学报,2004,22(4):415-419.@@[15]徐友春.基于机器视觉的汽车主动安全技术的研究[D].北 京:清华大学,2003.@@[16]于起峰,尚洋.摄像测量学原理与应用研究[M].科学出版社, 2009,25-34.曹毓(1982-),男,现国防科技大学光电学院博士研究生,从事有关光学传感器领域的研究工作,weiguang7910@sohu. com:冯莹(1956-),女,教授,博士生导师,主要研究方向为宽带光纤光源技术、光纤激光器技术、光纤波导生物传感器技术以及光电测控技术。
2014 - 基于光流法的迭代反投影超分辨率重构算法_杨克伟
基于光流法的迭代反投影超分辨率重构算法杨克伟(厦门大学通信工程系,厦门361005)摘要:为了提高重构图像或者视频的分辨率,提出把新型的基于光流法的图像配准算法应用于迭代反投影(IBP)超分辨率算法中。
在所提出的方法中,基于光流法的图像配准算法用来提高图像配准的准确性。
首先,为了得到像素级别的运动矢量,基于光流法的图像配准算法被用于估计图像间的运动矢量,以得到更加准确的运动矢量矩阵。
接着,利用所获得的运动矢量矩阵结合迭代反投影算法重构高分辨率的图像。
同时,由于基于光流法的图像配准能够很好地估计视频图像间的运动,所提出的方法同样适用于视频图像的超分辨。
实验结果表明,提出的方法对于图像或者视频的超分辨率效果,在主观效果和客观评价上都有一定的提升。
关键词:图像超分辨;视频超分辨;光流法;迭代反投影基金项目:国家自然科学基金(No.61102135)文章编号:1007-1423(2014)08-0031-06DOI:10.3969/j.issn.1007-1423.2014.08.0080引言图像的超分辨率重构是指对于一张或者多张的图像,利用超分辨率算法得到一张高分辨率的图像。
图像或者视频的超分辨重构在很多领域有重要的作用,例如天文学的研究、军事监视、医疗诊断、远程感应等领域。
超分辨率重构的本质是利用多张图像间互补的信息来扩展图像的高频分量[1]。
近年来,多种基于迭代的超分辨率重构算法逐渐被提出来,这些超分辨率重构算法主要分为基于频域的重构算法和基于时域的重构算法。
基于频域的重构算法最早由Tsai和Huang在1984年提出来[2],其提出的重构算法利用了傅里叶变换的频移特性。
基于时域的重构算法主要包括插值算法、迭代反投影算法[1,3]、凸集投影算法[4]、最大后验概率方法[5]以及基于学习的算法[6]。
尽管超分辨率重构算法的种类有很多,但是超分辨率重构算法的重构过程都主要包括四个部分:配准、映射、插值、去模糊和去噪声。
二维采样与重建的方法

二维采样与重建的方法
二维采样与重建的方法主要包括以下两种:
1. 探测物体的投影数据,然后使用这些数据来重建物体的实际内部构造。
这种方法基于图像重建的一般思想,即通过解方程组来找出矩阵中的元素。
例如,可以设那些矩阵元素为未知数,然后列出一个线性方程组,解这个方程组便可以得到答案。
2. 使用二维函数 f(x, y) 的傅里叶变换F(ωx, ωy) 沿与探测器平行的方向过
原点的片段,来重建物体的实际内部构造。
这种方法通常被称为处理FBP (Filtered Backprojection,先滤波后反投影)算法。
以上方法仅供参考,建议查阅关于二维采样与重建的资料或者咨询相关专家,获取更准确的信息。
仿射坐标二维傅里叶变换
仿射坐标二维傅里叶变换傅里叶变换是一种经典的数学方法,用于将一个函数在时域(或空域)上的描述转换为频域上的描述。
在二维空间中,我们可以使用傅里叶变换来对图像进行分析和处理,进而实现许多在图像处理领域中常见的任务,如图像压缩、滤波、模式识别等。
在二维傅里叶变换中,我们需要考虑到图像的空间坐标和灰度值。
图像可以理解为一个二维矩阵,其中每个元素表示一个像素的灰度值。
令\(f(x, y)\)表示图像在空间坐标\((x, y)\)处的灰度值,则二维傅里叶变换\(F(u, v)\)可以表示为:\[F(u,v) = \iint_{-\infty}^{\infty} f(x,y)e^{-j2\pi(ux+vy)}dxdy\]其中\((u, v)\)为频域坐标,\(j\)为虚数单位。
从公式可以看出,二维傅里叶变换将图像从空间域转换到频域,从而使得我们可以对图像的频域特征进行分析和处理。
在图像处理中,二维傅里叶变换可以用于实现频域滤波。
利用二维傅里叶变换,我们可以将图像进行频域分析,找到其中的频域特征,并对其进行调整,从而实现图像的滤波操作。
例如,通过将图像的频谱进行截断,可以实现低通滤波和高通滤波,来抑制或增强图像的特定频率成分,这对于图像的去噪和边缘增强非常有效。
此外,二维傅里叶变换还可以用于图像的压缩和重建。
通过将图像的频域系数进行截断或压缩,可以实现对图像的压缩。
而对于重建过程,则是通过将被压缩的频域系数进行逆变换,从而得到原始的图像。
这一方法被广泛应用在图像压缩和数据传输领域。
在图像处理的实际应用中,二维傅里叶变换还被广泛用于图像的特征提取和模式识别。
通过对图像的频域特征进行分析,我们可以获取到图像中的纹理、轮廓等特征信息,从而可以帮助我们进行图像的分类、检测等任务。
需要注意的是,二维傅里叶变换对图像的频域表示是一个周期性的,这意味着我们在进行频域分析时需要考虑到其周期性的特点。
此外,二维傅里叶变换还受到图像边界的影响,边界处的不连续性会导致频域分析的结果出现失真,因此在实际应用中通常需要对图像进行预处理,以克服这些问题。
基于定向二维插值的逆投影变换方法
近视场定向插值公式为
H 定向二维插值
在反向求解逆投影变换的过程中 " 本文用分段定 向二维插值求解非整数像素坐标对应的像素灰度值 ( 设逆投影变换后图像中待求像素点坐标为 # I" "该点的灰度值为 /K# (上一小节中利 用 J& I" J& 式# 对# 进行转换后得到的原始图像中的 像 6 & I" J& 素 坐 标为 # & "对该点 进行 插值后 得到 的 灰 度值 L" M 为 /K# 得到 & (将 LNM值 向 负 无 穷 方 向 圆 整 " L" M 像素 点 的 整 数 坐 标 为 # 的小数部分为 " & (# & O P L" M # " & "其中 Q -L8O SR -M 8P ( Q R 观 察 原 始 图 像 可 以 发 现 @在 道 路 区 域 的 下 半
以左半幅图像为例求解定向二维插值 ( 图 6中 " 黑色点为插值公式用到的像素点 " 白色点为未用点 (
# 6 & < ! ; $ ’ ? ! $6 6 . 5! 6 0 1 2 : 4 9 > % 为说明如何反向求解逆投影变换 " 将车辆前方纵 向A B6 A BD C"横向 8 D C 的区域进行逆投影变换 " 以得到世界坐标系内的道路图像 ( 首先规划逆投影变 换后的图像大小" 本文中设定变换后为 E 4 4 FG 4 4像 素的图像 ( 因此变换后的图像上像素值和距离值之间 存在比例缩放关系 " 纵向比为 D A "横向比为 ) 4 4 ( 进行比例缩放是为了看清图像细节 ( 现在逆投 影 变 换的 任 务 就 是 为 变 换 后 图 像 的 E 4 4 FG 4 4个 像 素点在原图像上找到相应像素值 ( 将待求像素点的 坐 标代入式# 6 & "反 求 该 点 对 应 的 原 始 图 像 中 的 像 素坐标 ( 通常求解得到的像素坐标不是整数 " 因此需 得到该点对应的像素灰度值 ( 要进行插值运算 "
基于新边缘指导插值的迭代反投影超分辨率重建算法
基于新边缘指导插值的迭代反投影超分辨率重建算法陶志强;李海林;张红兵【摘要】基于改进Keren配准算法的迭代反投影(IBP)超分辨率重建算法,使用双线性插值方法获得高分辨率图像的初始估计,导致重建图像产生边缘锯齿效应.针对该问题,提出一种基于新边缘指导插值(NEDI)的IBP超分辨率重建算法.利用低分辨率图像与高分辨率图像的局部协方差间的几何对偶性,通过计算低分辨率图像各像素点的局部协方差系数,得到高分辨率图像待插值像素点的值.实验结果表明,该算法能够有效减小边缘锯齿,提高峰值信噪比,降低均方根误差,并改善图像的主观视觉效果.【期刊名称】《计算机工程》【年(卷),期】2016(042)006【总页数】6页(P255-260)【关键词】超分辨率重建;迭代反投影;新边缘指导插值;峰值信噪比;均方根误差【作者】陶志强;李海林;张红兵【作者单位】南京航空航天大学电子信息工程学院,南京210016;南京航空航天大学电子信息工程学院,南京210016;南京航空航天大学电子信息工程学院,南京210016【正文语种】中文【中图分类】TP301.6中文引用格式:陶志强,李海林,张红兵.基于新边缘指导插值的迭代反投影超分辨率重建算法[J].计算机工程,2016,42(6):255-260.英文引用格式: Tao Zhiqiang,Li Hailin,Zhang Hongbing.Iterative Back Projection Super Resolution Reconstruction Algorithm Based on New Edge Directed Interpolation[J].Computer Engineering,2016,42(6):255-260.高分辨率图像在诸多领域都有重要的应用价值,包括高清电视、医学成像、卫星遥感技术、道路视频监控等。
尤其是在道路视频监控中,高分辨率图像对于后期的车型识别、车牌识别等有重要的实际意义。
CT矩阵的radon投影变换和反投影重建
CT矩阵的radon投影变换和反投影重建
1917年,***Radon引入了Radon变换,他还提供了逆变换的公式。
Radon 变换在数学中是一种积分变换,其逆变换用于从医学CT扫描中重建图像。
在计算机断层扫描中,断层扫描重建问题是从一组投影中获得断层切片图像。
通过绘制一组穿过感兴趣的2D对象的平行射线形成投影,并分配沿每条射线的对象对比度的积分到投影中的单个像素。
2D对象的单个投影是一维的。
为了实现对象的计算机断层扫描重建,必须获取多个投影,每个投影对应于相对于对象的射线之间的不同角度。
多个角度的投影集合称为正弦图,它是原始图像的线性变换。
在计算机断层扫描中使用逆Radon变换从测量的投影(正弦图)重建2D图像。
不存在实际的、精确的Radon逆变换实现,但有几种很好的近似算法可用。
由于逆Radon变换从一组投影中重建对象,所以(前向)Radon变换可用于模拟断层摄影实验。
iradon函数

iradon函数
iradon函数是一个MATLAB函数,用于执行“filtered back projection”算法,将Radon变换的投影图像进行反投影重建。
Radon 变换是一种图像处理和成像技术,用于将二维图像投影到一维空间中,并在此过程中捕捉图像中的几何信息。
通过使用iradon函数,可以将一组经过Radon变换的图像投影
进行反投影,从而生成原始图像的近似重建。
该函数需要提供两个输入参数:投影数据和投影角度。
投影数据是一个矩阵或三维数组,其中每一列代表一个投影,每一行代表一个角度。
投影角度是一个向量,表示每个投影所对应的角度。
在执行iradon函数时,可以根据需要选择不同的可选参数,例
如重建图像的大小、滤波算法等。
iradon函数的输出是一个二维矩阵,表示重建的图像。
虽然iradon函数是一种常用的反投影重建工具,但是它也有一
些限制。
例如,它假定重建对象是吸收介质,而不是散射介质。
此外,它还可能受到图像噪声和伪像的影响,特别是在低剂量成像和低对比度成像的情况下。
总的来说,iradon函数是一种强大的反投影重建工具,可用于
许多不同类型的成像应用。
它还可以与其他成像算法,例如过滤、去模糊和分割算法等相结合,以提高重建图像的质量和准确性。
- 1 -。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
利用分段定向二维插值进行逆投影变换前后的
图像如图3 所示。
2006, 46( 5)
图 3 逆投影变换前后的图像对比
因为考虑了车道线的方向性, 所以利用分段定 向二维插值进行的逆投影变换强化了车道线信息。 对比分别利用分段定向二维插值和普通二维线性插 值进行逆投影变换后的图像中同一行的像素灰度值 ( 图 4) , 可以发现利用分段定向二维插值方法变换 后的图像中车道线的双峰更为明显, 灰度值更大。
Ts inghua Uni versi ty, Beij ing 100084, Chi na)
Abstract: A r ever se in vers e perspect ive t ransf orm ( IPT ) met h od w as developed t o analyze environmen tal inf ormat ion coll ected by int el ligent vehicles . Th e image af t er t he trans form can be arranged accordin g t o th e users ' w ishes. Direct ional 2-D int erpolation in vari ou s s ubs ect ions w as used t o cal cul at e t he pix el gray values t o an al yze th e di rectional charact eris t ics of th e l an e m arkers . T heoret ical analys es and calibrat ion t est s sh ow t hat w it h t he direct ional 2-D int erpolat ion based IPT , t he im age accurat ely repres ent s t he road environm ent w it h much f ew er calculat ions and improved l ane m ark er iden ti ficat ion.
线方向的考虑权重越大, 本文中取 k 值为 0. 7。
远视场定向插值公式为
H p( m , n) = [ aH p ( i + 1, j ) + ( 1 - a) H p( i , j + 1) + bH p( i , j + 1) +
71 4
清 华 大 学 学 报 ( 自 然 科 学 版)
( 1 - b) H p( i + 1, j ) ] / 2.
3 摄像机横摆角及俯仰角偏 差补偿
在式( 2) 中假定摄像机安装的横摆角为 0°, 即 摄像机的光轴与车身的纵轴线之间不存在水平角, 实际上摄像机安装时会有一个水平的横摆角度, 经 测量本文所用实验车平台上的摄像机横摆角大约为 3°( 左偏) 。进行逆投影变换时对此横摆角度进行补
图 4 变换后图像中同一行像素灰度值对比
Key words: aut omobile; machi ne vis ion; inverse perspect ive t ransf orm; direct ional 2-D in terpolat ion
在智能车采集驾驶环境信息的过程中, 逆投影 变换得到了广泛的应用[ 1 5] 。传统逆投影变换方法 是利用从图像坐标系到世界坐标系的转换关系得到 去除透视效果的图像。本文提出了一种反向求解逆 投影的方法, 并考虑了车道线的方向特性, 提出了分 段的定向二维插值方法求解逆投影变换后图像各个 像素点的像素灰度值。
GUO Lei, LI K eqiang, MA Ying, WANG Jianqiang, LIAN Xiaomin
( State Key L aboratory of Automotive Saf ety and Energy, Department of Automotive Engi neeri ng,
2Py′t an 0t an 0P
0) ′ y
,
( 1)
Px =
h2 +
P
2 y
2P
′ x tan
W
0.
式中: h 为摄像机的安装高度, 2 0 为摄像机镜头的
水平视野角, 2 0 为 摄像机镜头的垂直视野角, 0 为摄像机的俯仰角。
本文提出的逆投影变换的反向求解方法利用了
从世界坐标系到图像坐标系的逆坐标变换关系。根
( 清华大学 汽车工程系, 汽车安全与节能国家重点实验室, 北京 100084)
26/ 35 71 2-71 5
摘 要: 为 了研究 逆投影 变换方法 在智能 车驾驶 环境信 息 采集 中的应用, 提出了 一种反向求 解逆投影 的方法, 即根 据 用户感兴趣的道路区域规划逆投影变换 后的图像, 并考 虑了 车道线的方向特性, 提出分段的定向二维插值方法求解 逆投 影变换后图像各个像素点的灰度值。理论分析 和标定试验表 明, 使用该方法进行逆投影变换后的图像能够较好地反 映客 观路 面情况, 并且可以 降低逆投影 变换的计 算量, 强化车 道 线信息。
收稿日期: 2005-04-26 基金项目: 国家 “十五”科技攻关项目 ( 2002BA 404A 21) 作者简介: 郭磊( 1980-) , 男( 汉) , 天津, 博士研究生。 通讯联系人: 李克强, 教授, E-mail: likq@ t sin ghua. edu . cn
郭 磊, 等: 基于定向二维插值的逆投影变换 方法
abH p( i + 1, j + 1) ] k +
1 3
H
p
(
i
+
1, j -
1) +
1 3
H
p(
i
+
2, j
-
1) +
1 3
H
(
i
+
2, j )
( 1 - k) .
( 3)
式( 3) 中前半部分为二维线性插值, 后半部分为
考虑左侧车道线在图像中的 45°方向特性而加入的
补偿项。比例因子 k 为定向幅度, k 值越小, 对车道
以左半幅图像为例求解定向二维插值。图2 中, 黑色点为插值公式用到的像素点, 白色点为未用点。
图 2 左半幅图像求解定向二维插值所用像素点
近视场定向插值公式为
H p( m, n) = [ ( 1 - a) ( 1 - b) H p( i , j ) +
a( 1 - b) H p( i + 1, j ) + b( 1 - a) H p( i, j + 1) +
ISSN 1000-0054 CN 11-2223/ N
清华大学学报 ( 自然科学版) J T singh ua U n iv ( Sci & Tech ) ,
2006 年 第 46 卷 第 5 期 2006, V o l. 46, N o . 5
基于定向二维插值的逆投影变换方法
郭 磊, 李克强, 马 莹, 王建强, 连小珉
关键词: 汽车; 机器视觉; 逆投影变换; 定向二维插值
中图分类号: U 27 文章编号: 1000-0054( 2006) 05-0712-04
文献标识码: A
1 逆投影变换的反向求解
定义世界坐标系和图像坐标系如图 1 所示。
Inverse perspective transform based on directional 2-D interpolation
取路平面上一点 P , 其路平面坐标系坐标为 ( P x , P y ) , P 点在图像平面内的对应点为 P ′, 其像 平面坐标系坐标为( P ′ x , P′ y ) 。
从图像坐标系到世界坐标系的坐标转换关系如
式( 1) 所示, 具体推导过程参见文[ 6] 。
Py =
h( H t an 0 + H - 2t an
等因素, 摄像机的俯仰角度会时刻变化, 本文提出利
用车道线平行假设来对摄像机俯仰角进行修正。
设经过逆投影变换后在图像中识别出来的左右
车道线的斜率分别为 kl 和 kr 。给出函数
S = ( kl - kr) 2.
( 7)
固 定摄像机其他参数不变, 函数 S 仅随摄像机
俯仰角变化。通常情况下, 道路两条车道线应该是近
( 4)
因为车道标志线在 远视场范围内所占区域较
小, 所以仅在插值公 式中考虑了在 45°方向上与点
( m, n) 相邻的两个像素点。
右半幅图像的定向二维插值可参照求解。
根据式( 5) 即可完成逆投影变换后图像中各像 素点像素灰度值的求解。
H p( M , N ) = H p( m , n) .
( 5)
似平行的, 也就是说两条车道线的斜率应该大致相
同, 因此函数 S 的值也应该接近 0。本文利用车道线
平行假设实时求解摄像机俯仰角度值。给定摄像机
俯仰角的变化范围, 以一定步长在此区间内变化, S 值最小点对应的俯仰角度值即为当幅图像所对应的
据式( 1) 可以求解出从世界坐标系到图像坐标系的
坐标映射如下式所示:
P ′ y =
PyH - H 2P yt an 0t an 0
htan 0 + 2ht an
,
0
P ′ x =
Px W
.
( 2)
h2 +
P
2 y
2tan
0
为说明如何反向求解逆投影变换, 将车辆前方纵 向 5~25 m, 横向- 4~4 m 的区域进行逆投影变换, 以得到 世界坐标系 内的道路图 像。首先 规划逆投影变