德州仪器(TI)LM3S2948系列 规格书,Datasheet 资料
机器人接口部分
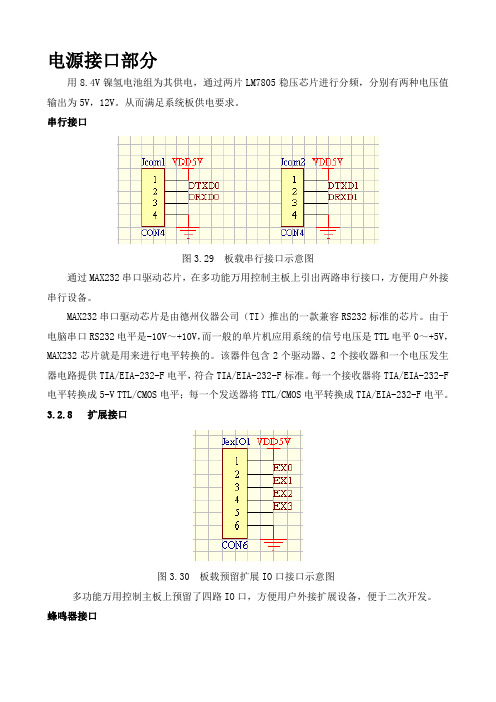
电源接口部分用8.4V镍氢电池组为其供电,通过两片LM7805稳压芯片进行分频,分别有两种电压值输出为5V,12V。
从而满足系统板供电要求。
串行接口图3.29 板载串行接口示意图通过MAX232串口驱动芯片,在多功能万用控制主板上引出两路串行接口,方便用户外接串行设备。
MAX232串口驱动芯片是由德州仪器公司(TI)推出的一款兼容RS232标准的芯片。
由于电脑串口RS232电平是-10V~+10V,而一般的单片机应用系统的信号电压是TTL电平0~+5V,MAX232芯片就是用来进行电平转换的。
该器件包含2个驱动器、2个接收器和一个电压发生器电路提供TIA/EIA-232-F电平,符合TIA/EIA-232-F标准。
每一个接收器将TIA/EIA-232-F 电平转换成5-V TTL/CMOS电平;每一个发送器将TTL/CMOS电平转换成TIA/EIA-232-F电平。
3.2.8 扩展接口图3.30 板载预留扩展IO口接口示意图多功能万用控制主板上预留了四路IO口,方便用户外接扩展设备,便于二次开发。
蜂鸣器接口板载蜂鸣器接口示意图板载蜂鸣器,起到提示的作用,当传感器工作时有提示声音,下载程序时,蜂鸣器发声,提示下载成功。
直流电机接口电机驱动芯片(L298N)图3.33 四路电机接口板载四路直流电机接口,用于给小车提供足够的动力来源。
采用两片L298N电机驱动芯片,其中每一片L298N均可驱动两路直流电机。
L298N内部包含4通道逻辑驱动电路。
可以方便的驱动两个直流电机,或一个两相步进电机。
L298N芯片可以驱动两个二相电机,也可以驱动一个四相电机,输出电压最高可达50V,可以直接通过电源来调节输出电压;可以直接用单片机的IO口提供信号;而且电路简单,使用比较方便。
恒速电机接口板载恒速电机接口示意图板载两路恒速电机接口,可用于外接小型直流电机。
步进电机接口板载步进电机接口示意图主板预留步进电机接口,可外接两路步进电机,用于完成控制步进电机的正转、反转、转动角度以及转动速度。
第1章嵌入式系统概述
2、SiM3U1xx(80MHZ USB)系列(M3)
1.4 STM32系列微控制器简介 STM32为意法半导体(ST)公司生产的ARM处理器。
Flash Size (bytes)
512K
256 K
STM32 prod Q2/08 Samples Dec 07 Prod Q2/08
未来 发展方向
64 K 32 K
STM32 Samples NOW Prod Oct 07
72 MHz CORTEX- M3 CPU Wide offer
• 32KB-512KB Flash • 6Kb-64KB RAM
0K 48 pins 64 pins 100 pins
144 pins
LQFP
LQFP
LQFP
LQFP
(7x7) (10x10) (14x14)/BGA (20x20)/BG
machinery or plants”.
1.嵌入式系统简介
目前,对嵌入式系统的定义多种多样,但没有一种定义是全面的。下面给出两种 比较合理定义:
●从技术的角度定义:以应用为中心、以计算机技术为基础、软件硬件可裁剪、 适应应用系统对功能、可靠性、成本、体积、功耗严格要求的专用计算机系统。 ●从系统的角度定义:嵌入式系统是设计完成复杂功能的硬件和软件,并使其紧 密耦合在一起的计算机系统。术语嵌入式反映了这些系统通常是更大系统中的一 个完整的部分,称为嵌入的系统。嵌入的系统中可以共存多个嵌入式系统。
ADC
16 channels /
Tem1pMSsepns sor
Power Supply Reg 1.8V
POR/PDR/PV XTDAL
oscillators 3I2nKt.HRzC+ o4s~c1il6lMatoHrzs 32KHz +
德州仪器(TI)LM3S2793系列规格书,Datasheet资料
TEXAS INSTRUMENTS-PRODUCTION DATAStellaris®LM3S2793MicrocontrollerDATA SHEETCopyright©2007-2012 DS-LM3S2793-11425CopyrightCopyright©2007-2012Texas Instruments Incorporated All rights reserved.Stellaris and StellarisWare®are registered trademarks of Texas Instruments Incorporated.ARM and Thumb are registered trademarks and Cortex is a trademark of ARM Limited.Other names and brands may be claimed as the property of others.PRODUCTION DATA information is current as of publication date.Products conform to specifications per the terms of Texas Instruments standard warranty.Production processing does not necessarily include testing of all parameters.Please be aware that an important notice concerning availability,standard warranty,and use in critical applications of Texas Instruments semiconductor products and disclaimers thereto appears at the end of this data sheet.Texas Instruments Incorporated108Wild Basin,Suite350Austin,TX78746/stellaris/sc/technical-support/product-information-centers.htmStellaris®LM3S2793MicrocontrollerTable of ContentsRevision History (32)About This Document (43)Audience (43)About This Manual (43)Related Documents (43)Documentation Conventions (44)1Architectural Overview (46)1.1Overview (46)1.2Target Applications (48)1.3Features (48)1.3.1ARM Cortex-M3Processor Core (48)1.3.2On-Chip Memory (50)1.3.3External Peripheral Interface (51)1.3.4Serial Communications Peripherals (53)1.3.5System Integration (57)1.3.6Advanced Motion Control (63)1.3.7Analog (65)1.3.8JTAG and ARM Serial Wire Debug (66)1.3.9Packaging and Temperature (67)1.4Hardware Details (67)2The Cortex-M3Processor (68)2.1Block Diagram (69)2.2Overview (70)2.2.1System-Level Interface (70)2.2.2Integrated Configurable Debug (70)2.2.3Trace Port Interface Unit(TPIU) (71)2.2.4Cortex-M3System Component Details (71)2.3Programming Model (72)2.3.1Processor Mode and Privilege Levels for Software Execution (72)2.3.2Stacks (72)2.3.3Register Map (73)2.3.4Register Descriptions (74)2.3.5Exceptions and Interrupts (87)2.3.6Data Types (87)2.4Memory Model (87)2.4.1Memory Regions,Types and Attributes (89)2.4.2Memory System Ordering of Memory Accesses (90)2.4.3Behavior of Memory Accesses (90)2.4.4Software Ordering of Memory Accesses (91)2.4.5Bit-Banding (92)2.4.6Data Storage (94)2.4.7Synchronization Primitives (95)2.5Exception Model (96)2.5.1Exception States (97)2.5.2Exception Types (97)Table of Contents2.5.3Exception Handlers (100)2.5.4Vector Table (100)2.5.5Exception Priorities (101)2.5.6Interrupt Priority Grouping (102)2.5.7Exception Entry and Return (102)2.6Fault Handling (104)2.6.1Fault Types (104)2.6.2Fault Escalation and Hard Faults (105)2.6.3Fault Status Registers and Fault Address Registers (106)2.6.4Lockup (106)2.7Power Management (106)2.7.1Entering Sleep Modes (106)2.7.2Wake Up from Sleep Mode (107)2.8Instruction Set Summary (108)3Cortex-M3Peripherals (111)3.1Functional Description (111)3.1.1System Timer(SysTick) (111)3.1.2Nested Vectored Interrupt Controller(NVIC) (112)3.1.3System Control Block(SCB) (114)3.1.4Memory Protection Unit(MPU) (114)3.2Register Map (119)3.3System Timer(SysTick)Register Descriptions (121)3.4NVIC Register Descriptions (125)3.5System Control Block(SCB)Register Descriptions (138)3.6Memory Protection Unit(MPU)Register Descriptions (167)4JTAG Interface (177)4.1Block Diagram (178)4.2Signal Description (178)4.3Functional Description (179)4.3.1JTAG Interface Pins (179)4.3.2JTAG TAP Controller (181)4.3.3Shift Registers (181)4.3.4Operational Considerations (182)4.4Initialization and Configuration (184)4.5Register Descriptions (185)4.5.1Instruction Register(IR) (185)4.5.2Data Registers (187)5System Control (189)5.1Signal Description (189)5.2Functional Description (189)5.2.1Device Identification (190)5.2.2Reset Control (190)5.2.3Non-Maskable Interrupt (195)5.2.4Power Control (195)5.2.5Clock Control (196)5.2.6System Control (203)5.3Initialization and Configuration (205)5.4Register Map (205)Stellaris®LM3S2793Microcontroller5.5Register Descriptions (207)6Hibernation Module (295)6.1Block Diagram (296)6.2Signal Description (296)6.3Functional Description (297)6.3.1Register Access Timing (297)6.3.2Hibernation Clock Source (298)6.3.3System Implementation (299)6.3.4Battery Management (300)6.3.5Real-Time Clock (300)6.3.6Battery-Backed Memory (301)6.3.7Power Control Using HIB (301)6.3.8Power Control Using VDD3ON Mode (301)6.3.9Initiating Hibernate (301)6.3.10Waking from Hibernate (301)6.3.11Interrupts and Status (302)6.4Initialization and Configuration (302)6.4.1Initialization (302)6.4.2RTC Match Functionality(No Hibernation) (303)6.4.3RTC Match/Wake-Up from Hibernation (303)6.4.4External Wake-Up from Hibernation (304)6.4.5RTC or External Wake-Up from Hibernation (304)6.5Register Map (304)6.6Register Descriptions (305)7Internal Memory (322)7.1Block Diagram (322)7.2Functional Description (322)7.2.1SRAM (323)7.2.2ROM (323)7.2.3Flash Memory (325)7.3Register Map (330)7.4Flash Memory Register Descriptions(Flash Control Offset) (331)7.5Memory Register Descriptions(System Control Offset) (343)8Micro Direct Memory Access(μDMA) (359)8.1Block Diagram (360)8.2Functional Description (360)8.2.1Channel Assignments (361)8.2.2Priority (362)8.2.3Arbitration Size (362)8.2.4Request Types (362)8.2.5Channel Configuration (363)8.2.6Transfer Modes (365)8.2.7Transfer Size and Increment (373)8.2.8Peripheral Interface (373)8.2.9Software Request (373)8.2.10Interrupts and Errors (374)8.3Initialization and Configuration (374)8.3.1Module Initialization (374)Table of Contents8.3.2Configuring a Memory-to-Memory Transfer (374)8.3.3Configuring a Peripheral for Simple Transmit (376)8.3.4Configuring a Peripheral for Ping-Pong Receive (377)8.3.5Configuring Channel Assignments (380)8.4Register Map (380)8.5μDMA Channel Control Structure (381)8.6μDMA Register Descriptions (388)9General-Purpose Input/Outputs(GPIOs) (417)9.1Signal Description (417)9.2Functional Description (422)9.2.1Data Control (423)9.2.2Interrupt Control (424)9.2.3Mode Control (425)9.2.4Commit Control (425)9.2.5Pad Control (426)9.2.6Identification (426)9.3Initialization and Configuration (426)9.4Register Map (427)9.5Register Descriptions (430)10External Peripheral Interface(EPI) (473)10.1EPI Block Diagram (474)10.2Signal Description (475)10.3Functional Description (477)10.3.1Non-Blocking Reads (478)10.3.2DMA Operation (479)10.4Initialization and Configuration (479)10.4.1SDRAM Mode (480)10.4.2Host Bus Mode (484)10.4.3General-Purpose Mode (495)10.5Register Map (503)10.6Register Descriptions (504)11General-Purpose Timers (546)11.1Block Diagram (547)11.2Signal Description (547)11.3Functional Description (550)11.3.1GPTM Reset Conditions (551)11.3.2Timer Modes (551)11.3.3DMA Operation (557)11.3.4Accessing Concatenated Register Values (558)11.4Initialization and Configuration (558)11.4.1One-Shot/Periodic Timer Mode (558)11.4.2Real-Time Clock(RTC)Mode (559)11.4.3Input Edge-Count Mode (559)11.4.4Input Edge Timing Mode (560)11.4.5PWM Mode (561)11.5Register Map (561)11.6Register Descriptions (562)Stellaris®LM3S2793Microcontroller 12Watchdog Timers (593)12.1Block Diagram (594)12.2Functional Description (594)12.2.1Register Access Timing (595)12.3Initialization and Configuration (595)12.4Register Map (595)12.5Register Descriptions (596)13Analog-to-Digital Converter(ADC) (618)13.1Block Diagram (619)13.2Signal Description (620)13.3Functional Description (622)13.3.1Sample Sequencers (622)13.3.2Module Control (623)13.3.3Hardware Sample Averaging Circuit (625)13.3.4Analog-to-Digital Converter (626)13.3.5Differential Sampling (629)13.3.6Internal Temperature Sensor (632)13.3.7Digital Comparator Unit (632)13.4Initialization and Configuration (637)13.4.1Module Initialization (637)13.4.2Sample Sequencer Configuration (638)13.5Register Map (638)13.6Register Descriptions (640)14Universal Asynchronous Receivers/Transmitters(UARTs) (698)14.1Block Diagram (699)14.2Signal Description (699)14.3Functional Description (701)14.3.1Transmit/Receive Logic (701)14.3.2Baud-Rate Generation (702)14.3.3Data Transmission (703)14.3.4Serial IR(SIR) (703)14.3.5ISO7816Support (704)14.3.6Modem Handshake Support (704)14.3.7LIN Support (706)14.3.8FIFO Operation (707)14.3.9Interrupts (708)14.3.10Loopback Operation (709)14.3.11DMA Operation (709)14.4Initialization and Configuration (709)14.5Register Map (710)14.6Register Descriptions (712)15Synchronous Serial Interface(SSI) (762)15.1Block Diagram (763)15.2Signal Description (763)15.3Functional Description (764)15.3.1Bit Rate Generation (765)15.3.2FIFO Operation (765)15.3.3Interrupts (765)Table of Contents15.3.4Frame Formats (766)15.3.5DMA Operation (773)15.4Initialization and Configuration (774)15.5Register Map (775)15.6Register Descriptions (776)16Inter-Integrated Circuit(I2C)Interface (804)16.1Block Diagram (805)16.2Signal Description (805)16.3Functional Description (806)16.3.1I2C Bus Functional Overview (806)16.3.2Available Speed Modes (808)16.3.3Interrupts (809)16.3.4Loopback Operation (810)16.3.5Command Sequence Flow Charts (811)16.4Initialization and Configuration (818)16.5Register Map (819)16.6Register Descriptions(I2C Master) (820)16.7Register Descriptions(I2C Slave) (833)17Inter-Integrated Circuit Sound(I2S)Interface (842)17.1Block Diagram (843)17.2Signal Description (843)17.3Functional Description (845)17.3.1Transmit (846)17.3.2Receive (850)17.4Initialization and Configuration (852)17.5Register Map (853)17.6Register Descriptions (854)18Controller Area Network(CAN)Module (879)18.1Block Diagram (880)18.2Signal Description (880)18.3Functional Description (881)18.3.1Initialization (882)18.3.2Operation (883)18.3.3Transmitting Message Objects (884)18.3.4Configuring a Transmit Message Object (884)18.3.5Updating a Transmit Message Object (885)18.3.6Accepting Received Message Objects (886)18.3.7Receiving a Data Frame (886)18.3.8Receiving a Remote Frame (886)18.3.9Receive/Transmit Priority (887)18.3.10Configuring a Receive Message Object (887)18.3.11Handling of Received Message Objects (888)18.3.12Handling of Interrupts (890)18.3.13Test Mode (891)18.3.14Bit Timing Configuration Error Considerations (893)18.3.15Bit Time and Bit Rate (893)18.3.16Calculating the Bit Timing Parameters (895)Stellaris®LM3S2793Microcontroller 18.4Register Map (898)18.5CAN Register Descriptions (899)19Analog Comparators (930)19.1Block Diagram (931)19.2Signal Description (931)19.3Functional Description (932)19.3.1Internal Reference Programming (933)19.4Initialization and Configuration (934)19.5Register Map (935)19.6Register Descriptions (936)20Pulse Width Modulator(PWM) (944)20.1Block Diagram (945)20.2Signal Description (946)20.3Functional Description (949)20.3.1PWM Timer (949)20.3.2PWM Comparators (950)20.3.3PWM Signal Generator (951)20.3.4Dead-Band Generator (952)20.3.5Interrupt/ADC-Trigger Selector (952)20.3.6Synchronization Methods (953)20.3.7Fault Conditions (954)20.3.8Output Control Block (954)20.4Initialization and Configuration (955)20.5Register Map (956)20.6Register Descriptions (959)21Quadrature Encoder Interface(QEI) (1022)21.1Block Diagram (1022)21.2Signal Description (1023)21.3Functional Description (1024)21.4Initialization and Configuration (1027)21.5Register Map (1027)21.6Register Descriptions (1028)22Pin Diagram (1045)23Signal Tables (1047)23.1100-Pin LQFP Package Pin Tables (1048)23.2108-Ball BGA Package Pin Tables (1084)23.3Connections for Unused Signals (1120)24Operating Characteristics (1122)25Electrical Characteristics (1123)25.1Maximum Ratings (1123)25.2Recommended Operating Conditions (1123)25.3Load Conditions (1124)25.4JTAG and Boundary Scan (1124)25.5Power and Brown-Out (1126)25.6Reset (1127)25.7On-Chip Low Drop-Out(LDO)Regulator (1128)25.8Clocks (1128)Table of Contents25.8.1PLL Specifications (1128)25.8.2PIOSC Specifications (1129)25.8.3Internal30-kHz Oscillator Specifications (1129)25.8.4Hibernation Clock Source Specifications (1130)25.8.5Main Oscillator Specifications (1130)25.8.6System Clock Specification with ADC Operation (1131)25.9Sleep Modes (1131)25.10Hibernation Module (1131)25.11Flash Memory (1133)25.12Input/Output Characteristics (1133)25.13External Peripheral Interface(EPI) (1134)25.14Analog-to-Digital Converter(ADC) (1139)25.15Synchronous Serial Interface(SSI) (1140)25.16Inter-Integrated Circuit(I2C)Interface (1142)25.17Inter-Integrated Circuit Sound(I2S)Interface (1143)25.18Analog Comparator (1144)25.19Current Consumption (1145)25.19.1Nominal Power Consumption (1145)25.19.2Maximum Current Consumption (1146)A Register Quick Reference (1148)B Ordering and Contact Information (1184)B.1Ordering Information (1184)B.2Part Markings (1184)B.3Kits (1185)B.4Support Information (1185)C Package Information (1186)C.1100-Pin LQFP Package (1186)C.1.1Package Dimensions (1186)C.1.2Tray Dimensions (1188)C.1.3Tape and Reel Dimensions (1188)C.2108-Ball BGA Package (1190)C.2.1Package Dimensions (1190)C.2.2Tray Dimensions (1192)C.2.3Tape and Reel Dimensions (1193)List of FiguresFigure1-1.Stellaris LM3S2793Microcontroller High-Level Block Diagram (47)Figure2-1.CPU Block Diagram (70)Figure2-2.TPIU Block Diagram (71)Figure2-3.Cortex-M3Register Set (73)Figure2-4.Bit-Band Mapping (94)Figure2-5.Data Storage (95)Figure2-6.Vector Table (101)Figure2-7.Exception Stack Frame (103)Figure3-1.SRD Use Example (117)Figure4-1.JTAG Module Block Diagram (178)Figure4-2.Test Access Port State Machine (181)Figure4-3.IDCODE Register Format (187)Figure4-4.BYPASS Register Format (187)Figure4-5.Boundary Scan Register Format (188)Figure5-1.Basic RST Configuration (192)Figure5-2.External Circuitry to Extend Power-On Reset (192)Figure5-3.Reset Circuit Controlled by Switch (193)Figure5-4.Power Architecture (196)Figure5-5.Main Clock Tree (199)Figure6-1.Hibernation Module Block Diagram (296)ing a Crystal as the Hibernation Clock Source (299)ing a Dedicated Oscillator as the Hibernation Clock Source with VDD3ONMode (299)Figure7-1.Internal Memory Block Diagram (322)Figure8-1.μDMA Block Diagram (360)Figure8-2.Example of Ping-PongμDMA Transaction (366)Figure8-3.Memory Scatter-Gather,Setup and Configuration (368)Figure8-4.Memory Scatter-Gather,μDMA Copy Sequence (369)Figure8-5.Peripheral Scatter-Gather,Setup and Configuration (371)Figure8-6.Peripheral Scatter-Gather,μDMA Copy Sequence (372)Figure9-1.Digital I/O Pads (422)Figure9-2.Analog/Digital I/O Pads (423)Figure9-3.GPIODATA Write Example (424)Figure9-4.GPIODATA Read Example (424)Figure10-1.EPI Block Diagram (475)Figure10-2.SDRAM Non-Blocking Read Cycle (483)Figure10-3.SDRAM Normal Read Cycle (483)Figure10-4.SDRAM Write Cycle (484)Figure10-5.Example Schematic for Muxed Host-Bus16Mode (490)Figure10-6.Host-Bus Read Cycle,MODE=0x1,WRHIGH=0,RDHIGH=0 (492)Figure10-7.Host-Bus Write Cycle,MODE=0x1,WRHIGH=0,RDHIGH=0 (493)Figure10-8.Host-Bus Write Cycle with Multiplexed Address and Data,MODE=0x0,WRHIGH=0,RDHIGH=0 (493)Figure10-9.Host-Bus Write Cycle with Multiplexed Address and Data and ALE with DualCSn (494)Figure10-10.Continuous Read Mode Accesses (494)Figure10-11.Write Followed by Read to External FIFO (495)Figure10-12.Two-Entry FIFO (495)Figure10-13.Single-Cycle Write Access,FRM50=0,FRMCNT=0,WRCYC=0 (499)Figure10-14.Two-Cycle Read,Write Accesses,FRM50=0,FRMCNT=0,RDCYC=1,WRCYC=1 (499)Figure10-15.Read Accesses,FRM50=0,FRMCNT=0,RDCYC=1 (500)Figure10-16.FRAME Signal Operation,FRM50=0and FRMCNT=0 (500)Figure10-17.FRAME Signal Operation,FRM50=0and FRMCNT=1 (500)Figure10-18.FRAME Signal Operation,FRM50=0and FRMCNT=2 (501)Figure10-19.FRAME Signal Operation,FRM50=1and FRMCNT=0 (501)Figure10-20.FRAME Signal Operation,FRM50=1and FRMCNT=1 (501)Figure10-21.FRAME Signal Operation,FRM50=1and FRMCNT=2 (501)Figure10-22.iRDY Signal Operation,FRM50=0,FRMCNT=0,and RD2CYC=1 (502)Figure10-23.EPI Clock Operation,CLKGATE=1,WR2CYC=0 (503)Figure10-24.EPI Clock Operation,CLKGATE=1,WR2CYC=1 (503)Figure11-1.GPTM Module Block Diagram (547)Figure11-2.Timer Daisy Chain (553)Figure11-3.Input Edge-Count Mode Example (555)Figure11-4.16-Bit Input Edge-Time Mode Example (556)Figure11-5.16-Bit PWM Mode Example (557)Figure12-1.WDT Module Block Diagram (594)Figure13-1.Implementation of Two ADC Blocks (619)Figure13-2.ADC Module Block Diagram (620)Figure13-3.ADC Sample Phases (624)Figure13-4.Doubling the ADC Sample Rate (625)Figure13-5.Skewed Sampling (625)Figure13-6.Sample Averaging Example (626)Figure13-7.ADC Input Equivalency Diagram (627)Figure13-8.Internal Voltage Conversion Result (628)Figure13-9.External Voltage Conversion Result (629)Figure13-10.Differential Sampling Range,V IN_ODD=1.5V (630)Figure13-11.Differential Sampling Range,V IN_ODD=0.75V (631)Figure13-12.Differential Sampling Range,V IN_ODD=2.25V (631)Figure13-13.Internal Temperature Sensor Characteristic (632)Figure13-14.Low-Band Operation(CIC=0x0and/or CTC=0x0) (635)Figure13-15.Mid-Band Operation(CIC=0x1and/or CTC=0x1) (636)Figure13-16.High-Band Operation(CIC=0x3and/or CTC=0x3) (637)Figure14-1.UART Module Block Diagram (699)Figure14-2.UART Character Frame (702)Figure14-3.IrDA Data Modulation (704)Figure14-4.LIN Message (706)Figure14-5.LIN Synchronization Field (707)Figure15-1.SSI Module Block Diagram (763)Figure15-2.TI Synchronous Serial Frame Format(Single Transfer) (767)Figure15-3.TI Synchronous Serial Frame Format(Continuous Transfer) (767)Figure15-4.Freescale SPI Format(Single Transfer)with SPO=0and SPH=0 (768)Figure15-5.Freescale SPI Format(Continuous Transfer)with SPO=0and SPH=0 (768)Figure15-6.Freescale SPI Frame Format with SPO=0and SPH=1 (769)Figure15-7.Freescale SPI Frame Format(Single Transfer)with SPO=1and SPH=0 (770)Figure15-8.Freescale SPI Frame Format(Continuous Transfer)with SPO=1and SPH=0 (770)Figure15-9.Freescale SPI Frame Format with SPO=1and SPH=1 (771)Figure15-10.MICROWIRE Frame Format(Single Frame) (772)Figure15-11.MICROWIRE Frame Format(Continuous Transfer) (773)Figure15-12.MICROWIRE Frame Format,SSIFss Input Setup and Hold Requirements (773)Figure16-1.I2C Block Diagram (805)Figure16-2.I2C Bus Configuration (806)Figure16-3.START and STOP Conditions (807)plete Data Transfer with a7-Bit Address (807)Figure16-5.R/S Bit in First Byte (808)Figure16-6.Data Validity During Bit Transfer on the I2C Bus (808)Figure16-7.Master Single TRANSMIT (812)Figure16-8.Master Single RECEIVE (813)Figure16-9.Master TRANSMIT with Repeated START (814)Figure16-10.Master RECEIVE with Repeated START (815)Figure16-11.Master RECEIVE with Repeated START after TRANSMIT with RepeatedSTART (816)Figure16-12.Master TRANSMIT with Repeated START after RECEIVE with RepeatedSTART (817)Figure16-13.Slave Command Sequence (818)Figure17-1.I2S Block Diagram (843)Figure17-2.I2S Data Transfer (846)Figure17-3.Left-Justified Data Transfer (846)Figure17-4.Right-Justified Data Transfer (846)Figure18-1.CAN Controller Block Diagram (880)Figure18-2.CAN Data/Remote Frame (882)Figure18-3.Message Objects in a FIFO Buffer (890)Figure18-4.CAN Bit Time (894)Figure19-1.Analog Comparator Module Block Diagram (931)Figure19-2.Structure of Comparator Unit (933)parator Internal Reference Structure (933)Figure20-1.PWM Module Diagram (946)Figure20-2.PWM Generator Block Diagram (946)Figure20-3.PWM Count-Down Mode (951)Figure20-4.PWM Count-Up/Down Mode (951)Figure20-5.PWM Generation Example In Count-Up/Down Mode (952)Figure20-6.PWM Dead-Band Generator (952)Figure21-1.QEI Block Diagram (1023)Figure21-2.Quadrature Encoder and Velocity Predivider Operation (1026)Figure22-1.100-Pin LQFP Package Pin Diagram (1045)Figure22-2.108-Ball BGA Package Pin Diagram(Top View) (1046)Figure25-1.Load Conditions (1124)Figure25-2.JTAG Test Clock Input Timing (1125)Figure25-3.JTAG Test Access Port(TAP)Timing (1125)Figure25-4.Power-On Reset Timing (1126)Figure25-5.Brown-Out Reset Timing (1126)Figure25-6.Power-On Reset and Voltage Parameters (1127)Figure25-7.External Reset Timing(RST) (1127)Figure25-8.Software Reset Timing (1127)Figure25-9.Watchdog Reset Timing (1128)Figure25-10.MOSC Failure Reset Timing (1128)Figure25-11.Hibernation Module Timing with Internal Oscillator Running in Hibernation (1132)Figure25-12.Hibernation Module Timing with Internal Oscillator Stopped in Hibernation (1133)Figure25-13.SDRAM Initialization and Load Mode Register Timing (1134)Figure25-14.SDRAM Read Timing (1135)Figure25-15.SDRAM Write Timing (1135)Figure25-16.Host-Bus8/16Mode Read Timing (1136)Figure25-17.Host-Bus8/16Mode Write Timing (1136)Figure25-18.Host-Bus8/16Mode Muxed Read Timing (1137)Figure25-19.Host-Bus8/16Mode Muxed Write Timing (1137)Figure25-20.General-Purpose Mode Read and Write Timing (1138)Figure25-21.General-Purpose Mode iRDY Timing (1138)Figure25-22.ADC Input Equivalency Diagram (1140)Figure25-23.SSI Timing for TI Frame Format(FRF=01),Single Transfer TimingMeasurement (1141)Figure25-24.SSI Timing for MICROWIRE Frame Format(FRF=10),Single Transfer (1141)Figure25-25.SSI Timing for SPI Frame Format(FRF=00),with SPH=1 (1142)Figure25-26.I2C Timing (1143)Figure25-27.I2S Master Mode Transmit Timing (1143)Figure25-28.I2S Master Mode Receive Timing (1144)Figure25-29.I2S Slave Mode Transmit Timing (1144)Figure25-30.I2S Slave Mode Receive Timing (1144)Figure C-1.Stellaris LM3S2793100-Pin LQFP Package Dimensions (1186)Figure C-2.100-Pin LQFP Tray Dimensions (1188)Figure C-3.100-Pin LQFP Tape and Reel Dimensions (1189)Figure C-4.Stellaris LM3S2793108-Ball BGA Package Dimensions (1190)Figure C-5.108-Ball BGA Tray Dimensions (1192)Figure C-6.108-Ball BGA Tape and Reel Dimensions (1193)List of TablesTable1.Revision History (32)Table2.Documentation Conventions (44)Table2-1.Summary of Processor Mode,Privilege Level,and Stack Use (73)Table2-2.Processor Register Map (74)Table2-3.PSR Register Combinations (79)Table2-4.Memory Map (87)Table2-5.Memory Access Behavior (90)Table2-6.SRAM Memory Bit-Banding Regions (92)Table2-7.Peripheral Memory Bit-Banding Regions (92)Table2-8.Exception Types (98)Table2-9.Interrupts (99)Table2-10.Exception Return Behavior (104)Table2-11.Faults (104)Table2-12.Fault Status and Fault Address Registers (106)Table2-13.Cortex-M3Instruction Summary (108)Table3-1.Core Peripheral Register Regions (111)Table3-2.Memory Attributes Summary (114)Table3-3.TEX,S,C,and B Bit Field Encoding (117)Table3-4.Cache Policy for Memory Attribute Encoding (118)Table3-5.AP Bit Field Encoding (118)Table3-6.Memory Region Attributes for Stellaris Microcontrollers (118)Table3-7.Peripherals Register Map (119)Table3-8.Interrupt Priority Levels (146)Table3-9.Example SIZE Field Values (174)Table4-1.JTAG_SWD_SWO Signals(100LQFP) (178)Table4-2.JTAG_SWD_SWO Signals(108BGA) (179)Table4-3.JTAG Port Pins State after Power-On Reset or RST assertion (180)Table4-4.JTAG Instruction Register Commands (185)Table5-1.System Control&Clocks Signals(100LQFP) (189)Table5-2.System Control&Clocks Signals(108BGA) (189)Table5-3.Reset Sources (190)Table5-4.Clock Source Options (197)Table5-5.Possible System Clock Frequencies Using the SYSDIV Field (200)Table5-6.Examples of Possible System Clock Frequencies Using the SYSDIV2Field (200)Table5-7.Examples of Possible System Clock Frequencies with DIV400=1 (201)Table5-8.System Control Register Map (205)Table5-9.RCC2Fields that Override RCC Fields (226)Table6-1.Hibernate Signals(100LQFP) (296)Table6-2.Hibernate Signals(108BGA) (297)Table6-3.Hibernation Module Clock Operation (303)Table6-4.Hibernation Module Register Map (305)Table7-1.Flash Memory Protection Policy Combinations (326)er-Programmable Flash Memory Resident Registers (330)Table7-3.Flash Register Map (330)Table8-1.μDMA Channel Assignments (361)Table8-2.Request Type Support (363)Table8-3.Control Structure Memory Map (364)Table8-4.Channel Control Structure (364)Table8-5.μDMA Read Example:8-Bit Peripheral (373)Table8-6.μDMA Interrupt Assignments (374)Table8-7.Channel Control Structure Offsets for Channel30 (375)Table8-8.Channel Control Word Configuration for Memory Transfer Example (375)Table8-9.Channel Control Structure Offsets for Channel7 (376)Table8-10.Channel Control Word Configuration for Peripheral Transmit Example (377)Table8-11.Primary and Alternate Channel Control Structure Offsets for Channel8 (378)Table8-12.Channel Control Word Configuration for Peripheral Ping-Pong ReceiveExample (379)Table8-13.μDMA Register Map (380)Table9-1.GPIO Pins With Non-Zero Reset Values (418)Table9-2.GPIO Pins and Alternate Functions(100LQFP) (418)Table9-3.GPIO Pins and Alternate Functions(108BGA) (420)Table9-4.GPIO Pad Configuration Examples (426)Table9-5.GPIO Interrupt Configuration Example (427)Table9-6.GPIO Pins With Non-Zero Reset Values (428)Table9-7.GPIO Register Map (428)Table9-8.GPIO Pins With Non-Zero Reset Values (441)Table9-9.GPIO Pins With Non-Zero Reset Values (447)Table9-10.GPIO Pins With Non-Zero Reset Values (449)Table9-11.GPIO Pins With Non-Zero Reset Values (452)Table9-12.GPIO Pins With Non-Zero Reset Values (459)Table10-1.External Peripheral Interface Signals(100LQFP) (475)Table10-2.External Peripheral Interface Signals(108BGA) (476)Table10-3.EPI SDRAM Signal Connections (481)Table10-4.Capabilities of Host Bus8and Host Bus16Modes (485)Table10-5.EPI Host-Bus8Signal Connections (486)Table10-6.EPI Host-Bus16Signal Connections (488)Table10-7.EPI General Purpose Signal Connections (497)Table10-8.External Peripheral Interface(EPI)Register Map (503)Table11-1.Available CCP Pins (547)Table11-2.General-Purpose Timers Signals(100LQFP) (548)Table11-3.General-Purpose Timers Signals(108BGA) (549)Table11-4.General-Purpose Timer Capabilities (550)Table11-5.Counter Values When the Timer is Enabled in Periodic or One-Shot Modes (551)Table11-6.16-Bit Timer With Prescaler Configurations (552)Table11-7.Counter Values When the Timer is Enabled in RTC Mode (553)Table11-8.Counter Values When the Timer is Enabled in Input Edge-Count Mode (554)Table11-9.Counter Values When the Timer is Enabled in Input Event-Count Mode (555)Table11-10.Counter Values When the Timer is Enabled in PWM Mode (556)Table11-11.Timers Register Map (561)Table12-1.Watchdog Timers Register Map (596)Table13-1.ADC Signals(100LQFP) (620)Table13-2.ADC Signals(108BGA) (621)Table13-3.Samples and FIFO Depth of Sequencers (622)Table13-4.Differential Sampling Pairs (629)。
SH366006 标准版用户手册_V1.0
MCU及常见MCU外围电路

电子系统设计与实践
28
2013/5/12
Cortex-M3
电子系统设计与实践
29
2013/5/12
Cortex-M4
电子系统设计与实践
30
2013/5/12
CMSIS
ARM Cortex 微控制器软件接口标准
(CMSIS) 是 Cortex-M 处理器系列的与 供应商无关的硬件抽象层。 使用 CMSIS,可以为接口外设、实时操作系 统和中间件实现一致且简单的软件接口, 从而简化软件的重用、缩短新微控制器 开发人员的学习过程,并缩短新产品的 上市时间。
电子系统设计与实践
15
2013/5/12
嵌入式处理器(常见)
ADI
ADSP-BF53x/56x (Blackfin 16bits) TI OMAP2、DM64x、达芬奇 (ARM+TI DSP) Intel Pentium-M C-M 、 Core-Duo (x86) Via C7 (x86) Altera NiosII (NiosII soft core) Xilinx PowerPC(硬核)/MicroBlaze 软核 Magiceyes MMSP2 MP25xx (Dual ARM9) ARM Cortex内核(Cortex-A8/Cortex-A9)
Cortex-M核芯片
意法半导体-- STM STM32 F0xx系列(M0 48MHZ) STM32 Lxxx系列(M3 32MHZ) STM32 F1xx系列(M3 72MHZ) STM32 F2xx系列(M3 120MHZ) STM32 F4xx系列(M4 168MHZ)
电子系统设计与实践
17
2013/5/12
SD2943W;中文规格书,Datasheet资料

August 2011Doc ID 11584 Rev 31/15SD2943HF/VHF/UHF RF power N-channel MOSFETsFeatures■High power capability■P OUT = 350 W min. with 22dB gain @ 30 MHz ■P SAT = 450 W ■Low R DS(on)■Thermally enhanced packaging for lower junction temperatures ■Gold metallization ■Excellent thermal stability ■Common source configurationDescriptionThe SD2943 is a gold metallized N-channel MOS field-effect RF power transistor. It is intended for use in 50 V dc large signal applications up to 150 MHz. The SD2943 offers a 20% higher power saturation than the SD2933, and is ideal for ISM applications where reliability and ruggedness are critical factors.Table 1.Device summaryOrder code Marking Base qty.Package Packaging (1)SD2943WSD2943(1)25 pcsM177Plastic tray1.For more details please refer to Chapter 7: Marking, packing and shipping specifications ..Contents SD2943 Contents1Electrical data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 2Electrical characteristics . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 3Impedance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 4Typical performance . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 5Test Circuit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 6Package mechanical data . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 7Marking, packing and shipping specifications . . . . . . . . . . . . . . . . . . . 13 8Revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142/15Doc ID 11584 Rev 3SD2943Electrical dataDoc ID 11584 Rev 33/151 Electrical data(T CASE = 25°C)Table 2.Absolute maximum ratingSymbol ParameterValue Unit V (BR)DSS (1)Drain source voltage130V V DGR Drain-gate voltage (R GS = 1MW)130V V GS Gate-source voltage ±20V I D Drain current 40A P DISS Power dissipation648W T j Max. operating junction temperature200°C E AS Avalanche energy, single pulse (I D = 53A, 800µH coil)1100mJ T STGStorage temperature-65 to +150°C1.T J = 150 °CTable 3.Thermal dataSymbol ParameterValue Unit R thJCJunction to case thermal resistance0.27°C/WElectrical characteristics SD29434/15Doc ID 11584 Rev 32 Electrical characteristics(T CASE = 25°C)Table 4.StaticSymbol Test conditionsMin.Typ.Max.Unit V (BR)DSS (1)V GS = 0 V I DS = 200 mA 130V I DSS V GS = 0 V V DS = 50 V 200µA I GSS V GS = 20 V V DS = 0 V 500nA V GS(Q)V DS = 10 V I D = 250 mA 24V V DS(ON)V GS = 10 V I D = 20 A 2V G FS (2)V DS = 10 V I D = 10 A 10mho C ISS V GS = 0 V V DS = 50 V f = 1 MHz 830pF C OSS V GS = 0 V V DS = 50 V f = 1 MHz 470pF C RSSV GS = 0 VV DS = 50 Vf = 1 MHz35pF1.T J = 150°C2.GFS sorts for each unit see Table .Table 5.DynamicSymbol Test conditionsMin.Typ.Max.Unit P OUT V DD = 50 V I DQ = 250 mAf = 30 MHz 350450W G PS V DD = 50 V I DQ = 250 mA P OUT = 350 W f = 30 MHz 2225dB h D V DD = 50 VI DQ = 250 mA P OUT = 350 Wf = 30 MHz 6065%Load MismatchV DD = 50 V I DQ = 250 mA P OUT = 350 W f = 30 MHzAll Phase Angles3:1VSWRTable 6.G FS sortsSymbolValue A 10 ÷ 10.99B 11 ÷ 11.99C 12 ÷ 12.99D 13 ÷ 13.99E 14 ÷ 14.99F 15 ÷ 15.99G 16 ÷ 16.99H17 ÷ 18SD2943Impedance 3 ImpedanceFigure 2.Impedance Data SchematicTable 7.Impedance dataf Z IN (Ω)Z DL (Ω)30 MHz 1.3 - j 2.9 3.1 + j 2.3108 MHz 1.4 - j 2.4 1.9 + j 1.4175 MHz 1.4 - j 2.2 1.7 +j 1.6Doc ID 11584 Rev 35/15Typical performance SD29436/15Doc ID 11584 Rev 34 Typical performanceFigure 5.Gate-source voltage vs caseFigure 6.Maximum thermal resistance vs.SD2943Typical performance Figure 7.Output power vs input power Figure 8.Output power vs input power (atDoc ID 11584 Rev 37/15Test Circuit SD29438/15Doc ID 11584 Rev 35 Test CircuitNote:1Dimension at component symbol are reference for component placement.2Gap between group and trasmission files are 0.056[1.42] typ.3Transmission lime are not 1:1 scale.4Input and output trasmission line are 50ΩTable 8.30 MHz test circuit component part listSymbol DescriptionC1,C90.01 µF / 500 V surface mount ceramic chip capacitor C2, C3750 pF A TC 700B surface mount ceramic chip capacitor C4300 pF A TC 700B surface mount ceramic chip capacitorC5,C10,C11,C14,C1610000 pF A TC 200B surface mount ceramic chip capacitorC6510 pF A TC 700B surface mount ceramic chip capacitor C7300 pF A TC 700B surface mount ceramic chip capacitor C8175-680 pF TYPE 46 standard trimmer capacitor C1247 µF / 63 V aluminum electrolytic radial lead capacitorSD2943Test CircuitDoc ID 11584 Rev 39/15C131200 pF A TC 700B surface mount ceramic chip capacitor C15100 µF / 63 V aluminum electrolytic radial lead capacitor R1,R3 1 K Ω 1 W surface mount chip resistor R2560Ω 2 W wire-wound axils lead resistor T1HF 2-30 MHz surface mount 9:1 transformerT2RG - 142B/U 50Ω coaxial cable OD = 0.165[4.18] L 15”[381.00] covered with 15”[381.00] tinned copper tubular brand 13/65” [5.1] widthL1 1 3/4 turn air-wound 16 AWG ID = 0.219 [5.56] poly-coated magnet wire L2 1 3/4 turn air-wound 12 AWG ID = 0.250 [6.34] bus bar wire RFC1,RFC23 turns 14 AWG wire through fair rite toroid FB1surface mount emi shield bead FB2toroidPCBULTRALAM 2000. 0.030” THK, εr = 2.55, 2 Oz ED CU both sidesTable 8.30 MHz test circuit component part list (continued)Symbol DescriptionTest Circuit SD294310/15Doc ID 11584 Rev 3分销商库存信息: STMSD2943W。
Nsiway NNSS44335588 超低EMI、无需滤波器、5W+3W×2的2.1声道 用户手
10.1
TQFN4×4-28 封装尺寸................................................................................................................... 18
10.2
SOP-28 封装尺寸............................................................................................................................ 19
7.3
NS4358 引脚功能描述 ..................................................................................................................... 9
7.4
芯片印章说明 ................................................................................................................................. 10
NS4358
超低EMI、无需滤波器、5W+3W×2的2.1声道+3D环绕立体声数字音频功放
NS4358 用户手册 V1.1
深圳市纳芯威科技有限公司 2011 年 10 月
Nsiway
1
日期
2011-3-11 2011-10-11
NS4358
超低EMI、无需滤波器、5W+3W×2的2.1声道+3D环绕立体声数字音频功放
低掉电控制器LM2940说明书
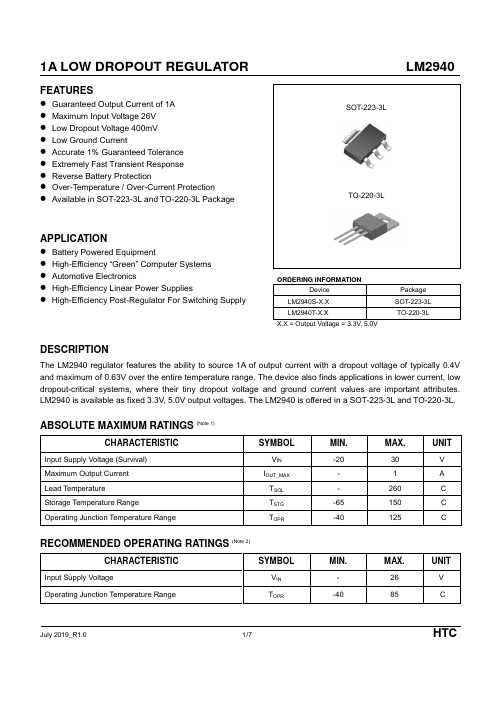
FEATURES●Guaranteed Output Current of 1A ●Maximum Input Voltage 26V●Low Dropout Voltage 400mV●Low Ground Current●Accurate 1% Guaranteed Tolerance●Extremely Fast Transient Response●Reverse Battery Protection●Over-Temperature / Over-Current Protection●Available in SOT-223-3L and TO-220-3L PackageAPPLICATION●Battery Powered Equipment●High-Efficiency “Green” Computer Systems●Automotive Electronics●High-Efficiency Linear Power Supplies●High-Efficiency Post-Regulator For Switching SupplySOT-223-3LTO-220-3LORDERING INFORMATIONDevice Package LM2940S-X.X SOT-223-3L LM2940T-X.X TO-220-3L X.X = Output Voltage = 3.3V, 5.0VDESCRIPTIONThe LM2940 regulator features the ability to source 1A of output current with a dropout voltage of typically 0.4V and maximum of 0.63V over the entire temperature range. The device also finds applications in lower current, low dropout-critical systems, where their tiny dropout voltage and ground current values are important attributes. LM2940 is available as fixed 3.3V, 5.0V output voltages. The LM2940 is offered in a SOT-223-3L and TO-220-3L.ABSOLUTE MAXIMUM RATINGS (Note 1)CHARACTERISTIC SYMBOL MIN. MAX. UNIT Input Supply Voltage (Survival) V IN-20 30 V Maximum Output Current I OUT_MAX- 1 A Lead Temperature T SOL- 260 °C Storage Temperature Range T STG-65 150 °C Operating Junction Temperature Range T OPR-40 125 °CRECOMMENDED OPERATING RATINGS (Note 2)CHARACTERISTIC SYMBOL MIN. MAX. UNIT Input Supply Voltage V IN- 26 V Operating Junction Temperature Range T OPR-40 85 °CHTCORDERING INFORMATIONV OUT Package Order No. Supplied As Status3.3VSOT-223-3L LM2940S-3.3 ReelActiveTO-220-3L LM2940T-3.3 Tube Active5.0V SOT-223-3L LM2940S-5.0 Reel ActiveTO-220-3L LM2940T-5.0 Tube ActiveHTCPIN CONFIGURATIONSOT-223-3L TO-220-3LPIN DESCRIPTIONSOT-223-3L / TO-220-3LPin No.Name Function1 VIN Input Voltage2 GND Ground3 VOUT Output VoltageHTCTYPICAL CIRCUITV IN V OUT* LM2940 can deliver a continuous current of 1A over the full operating temperature. However, the output current is limited by the restriction of power dissipation which differs from packages. A heat sink may be required depending on the maximum power dissipation and maximum ambient temperature of application.With respect to the applied package, the maximum output current of 1A may be still undeliverable.** See Application Information.*** C IN : C IN must be at least 1uF or large to maintain stability.**** C OUT : C OUT must be at least 10uF or large to maintain stability.HTCELECTRICAL CHARACTERISTICS (Note 3)Limits in standard typeface are for T J = 25°C, and limits in boldface type apply over the full operating temperature range. Unless otherwise specified: V IN (Note 4) = V O(NOM) + 1V, I OUT = 5 mA, C IN = 10 μF, C OUT = 10 μFPARAMETER SYMBOL TEST CONDITION MIN. TYP. MAX. UNIT Output Voltage Tolerance V OI OUT = 5mA -1 - 1 %5 mA ≤ I OUT≤ 1A, (V OUT+1V) ≤ V IN≤ 26V -2 - 2 % Line Regulation ΔV LINE I OUT = 5mA, (V OUT+1V) ≤ V IN≤ 26V - 0.06 0.5 % Load Regulation ΔV LOAD V IN = V OUT +1V, 5 mA ≤ I OUT≤ 1A - 0.2 1 %Output VoltageTemperature Coefficient (Note 5)ΔV OUT /ΔT - - 100 ppm/°CDropout Voltage (Note 6)V DROP I OUT = 5mA - 60 180 mV I OUT = 100mA - 170 - mV I OUT = 1A - 400 630mVGround Pin Current (Note 7)I GNDI OUT = 5mA - 250 500 μAI OUT = 1A - 16 25 mA Ground Pin Current at Dropout I GNDDO V IN = 0.5V less than specified V OUT, I OUT = 5mA - 1 - mA Current Limit I CL V OUT = 0V - 1.5 - ANote 1. Exceeding the absolute maximum ratings may damage the device.Note 2. The device is not guaranteed to function outside its operating ratings.Note 3. Stresses listed as the absolute maximum ratings may cause permanent damage to the device. These are for stress ratings. Functional operating of the device at these or any other conditions beyond those indicated in the operational sections of the specifications is not implied. Exposure to absolute maximum rating conditions for extended periods may remain possibly to affect device reliability.Note 4. The minimum operating value for input voltage is equal to either (V OUT,NOM + V DROP), whichever is greater.Note 5. Output voltage temperature coefficient is defined as the worst case voltage change divided by the total temperature range.Note 6. Dropout voltage is defined as the minimum input to output differential voltage at which the output drops 1% below the nominal value. Note 7. Ground current, or quiescent current, is the difference between input and output currents. It's defined by I GND = I IN - I OUT under the given loading condition. The total current drawn from the supply is the sum of the load current plus the ground pin current.HTCAPPLICATION INFORMATIONMaximum Output Current CapabilityThe LM2940 can deliver a continuous current of 1A over the full operating junction temperature range. However, the output current is limited by the restriction of power dissipation which differs from packages. A heat sink may be required depending on the maximum power dissipation and maximum ambient temperature of application. With respect to the applied package, the maximum output current of 1A may be still undeliverable due to the restriction of the power dissipation of LM2940. Under all possible conditions, the junction temperature must be within the range specified under operating conditions. The temperatures over the device are given by:T C = T A + P D X θCA / T J = T C + P D X θJC / T J = T A + P D X θJAwhere T J is the junction temperature, T C is the case temperature, T A is the ambient temperature, P D is the total power dissipation of the device, θCA is the thermal resistance of case-to-ambient, θJC is the thermal resistance of junction-to-case, and θJA is the thermal resistance of junction to ambient. The total power dissipation of the device is given by:P D = P IN – P OUT = (V IN X I IN)–(V OUT X I OUT)= (V IN X (I OUT+I GND)) – (V OUT X I OUT) = (V IN - V OUT) X I OUT + (V IN X I GND)where I GND is the operating ground current of the device which is specified at the Electrical Characteristics. The maximum allowable temperature rise (T Rmax) depends on the maximum ambient temperature (T Amax) of the application, and the maximum allowable junction temperature (T Jmax):T Rmax = T Jmax – T AmaxThe maximum allowable value for junction-to-ambient thermal resistance, θJA, can be calculated using the formula:θJA = T Rmax / P D = (T Jmax – T Amax) / P DLM2940 is available in SOT-223-3L package. The thermal resistance depends on amount of copper area or heat sink, and on air flow. If the maximum allowable value of θJA calculated above is over 137°C/W for SOT-223 -3L package, no heat sink is needed since the package can dissipate enough heat to satisfy these requirements. If the value for allowable θJA falls near or below these limits, a heat sink or proper area of copper plane is required. In summary, the absolute maximum ratings of thermal resistances are as follow:Absolute Maximum Ratings of Thermal ResistanceCharacteristic Symbol Rating Unit Thermal Resistance Junction-To-Ambient / SOT-223-3L θJA-SOT-223-3L137 °C/W Thermal Resistance Junction-To-Ambient / TO-220-3L θJA-TO-220-3L70 °C/WNo heat sink / No air flow / No adjacent heat source / T A=25°CHTCREVISION NOTICEThe description in this datasheet is subject to change without notice to describe its electrical characteristics properly.HTC。
德州仪器,LM3S9B90-I系列, 规格书,Datasheet 资料
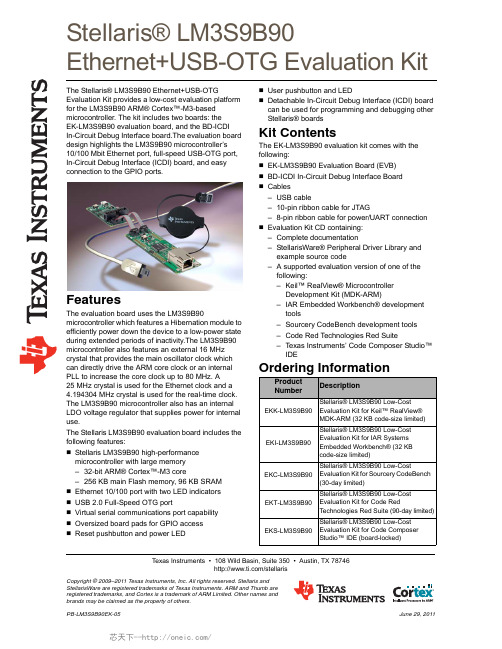
Texas Instruments •108 Wild Basin, Suite 350•Austin, TX 78746/stellarisCopyright © 2009–2011 Texas Instruments, Inc. All rights reserved. Stellaris andStellarisWare are registered trademarks of Texas Instruments. ARM and Thumb areregistered trademarks, and Cortex is a trademark of ARM Limited. Other names andbrands may be claimed as the property of others.PB-LM3S9B90EK-05June 29, 2011The Stellaris® LM3S9B90 Ethernet+USB-OTG Evaluation Kit provides a low-cost evaluation platform for the LM3S9B90 ARM® Cortex™-M3-based microcontroller. The kit includes two boards: the EK-LM3S9B90 evaluation board, and the BD-ICDI In-Circuit Debug Interface board.The evaluation board design highlights the LM3S9B90 microcontroller’s10/100 Mbit Ethernet port, full-speed USB-OTG port, In-Circuit Debug Interface (ICDI) board, and easy connection to the GPIO ports.Features The evaluation board uses the LM3S9B90 microcontroller which features a Hibernation module toefficiently power down the device to a low-power state during extended periods of inactivity.The LM3S9B90 microcontroller also features an external 16MHz crystal that provides the main oscillator clock which can directly drive the ARM core clock or an internalPLL to increase the core clock up to 80MHz. A 25MHz crystal is used for the Ethernet clock and a 4.194304MHz crystal is used for the real-time clock. The LM3S9B90 microcontroller also has an internal LDO voltage regulator that supplies power for internal use.The Stellaris LM3S9B90 evaluation board includes the following features: Stellaris LM3S9B90 high-performance microcontroller with large memory –32-bit ARM® Cortex™-M3 core –256KB main Flash memory, 96KB SRAM Ethernet 10/100 port with two LED indicators USB 2.0 Full-Speed OTG port Virtual serial communications port capability Oversized board pads for GPIO access Reset pushbutton and power LED User pushbutton and LEDDetachable In-Circuit Debug Interface (ICDI) board can be used for programming and debugging other Stellaris® boardsKit ContentsThe EK-LM3S9B90 evaluation kit comes with the following:EK-LM3S9B90 Evaluation Board (EVB)BD-ICDI In-Circuit Debug Interface BoardCables–USB cable–10-pin ribbon cable for JTAG–8-pin ribbon cable for power/UART connectionEvaluation Kit CD containing:–Complete documentation–StellarisWare® Peripheral Driver Library andexample source code– A supported evaluation version of one of thefollowing:–Keil™ RealView® MicrocontrollerDevelopment Kit (MDK-ARM)–IAR Embedded Workbench® developmenttools–Sourcery CodeBench development tools –Code Red Technologies Red Suite –Texas Instruments’ Code Composer Studio™ IDEOrdering InformationProductNumber Description EKK-LM3S9B90Stellaris® LM3S9B90 Low-Cost Evaluation Kit for Keil™ RealView® MDK-ARM (32 KB code-size limited)EKI-LM3S9B90Stellaris® LM3S9B90 Low-Cost Evaluation Kit for IAR Systems Embedded Workbench® (32 KB code-size limited)EKC-LM3S9B90Stellaris® LM3S9B90 Low-Cost Evaluation Kit for Sourcery CodeBench(30-day limited)EKT-LM3S9B90Stellaris® LM3S9B90 Low-Cost Evaluation Kit for Code Red Technologies Red Suite (90-day limited)EKS-LM3S9B90Stellaris® LM3S9B90 Low-Cost Evaluation Kit for Code ComposerStudio™ IDE (board-locked)Stellaris®LM3S9B90Ethernet+USB-OTG Evaluation Kit 芯天下--/IMPORTANT NOTICETexas Instruments Incorporated and its subsidiaries(TI)reserve the right to make corrections,modifications,enhancements,improvements, and other changes to its products and services at any time and to discontinue any product or service without notice.Customers should obtain the latest relevant information before placing orders and should verify that such information is current and complete.All products are sold subject to TI’s terms and conditions of sale supplied at the time of order acknowledgment.TI warrants performance of its hardware products to the specifications applicable at the time of sale in accordance with TI’s standard warranty.Testing and other quality control techniques are used to the extent TI deems necessary to support this warranty.Except where mandated by government requirements,testing of all parameters of each product is not necessarily performed.TI assumes no liability for applications assistance or customer product design.Customers are responsible for their products and applications using TI components.To minimize the risks associated with customer products and applications,customers should provide adequate design and operating safeguards.TI does not warrant or represent that any license,either express or implied,is granted under any TI patent right,copyright,mask work right, or other TI intellectual property right relating to any combination,machine,or process in which TI products or services are rmation published by TI regarding third-party products or services does not constitute a license from TI to use such products or services or a warranty or endorsement e of such information may require a license from a third party under the patents or other intellectual property of the third party,or a license from TI under the patents or other intellectual property of TI.Reproduction of TI information in TI data books or data sheets is permissible only if reproduction is without alteration and is accompanied by all associated warranties,conditions,limitations,and notices.Reproduction of this information with alteration is an unfair and deceptive business practice.TI is not responsible or liable for such altered rmation of third parties may be subject to additional restrictions.Resale of TI products or services with statements different from or beyond the parameters stated by TI for that product or service voids all express and any implied warranties for the associated TI product or service and is an unfair and deceptive business practice.TI is not responsible or liable for any such statements.TI products are not authorized for use in safety-critical applications(such as life support)where a failure of the TI product would reasonably be expected to cause severe personal injury or death,unless officers of the parties have executed an agreement specifically governing such use.Buyers represent that they have all necessary expertise in the safety and regulatory ramifications of their applications,and acknowledge and agree that they are solely responsible for all legal,regulatory and safety-related requirements concerning their products and any use of TI products in such safety-critical applications,notwithstanding any applications-related information or support that may be provided by TI.Further,Buyers must fully indemnify TI and its representatives against any damages arising out of the use of TI products in such safety-critical applications.TI products are neither designed nor intended for use in military/aerospace applications or environments unless the TI products are specifically designated by TI as military-grade or"enhanced plastic."Only products designated by TI as military-grade meet military specifications.Buyers acknowledge and agree that any such use of TI products which TI has not designated as military-grade is solely at the Buyer's risk,and that they are solely responsible for compliance with all legal and regulatory requirements in connection with such use. TI products are neither designed nor intended for use in automotive applications or environments unless the specific TI products are designated by TI as compliant with ISO/TS16949requirements.Buyers acknowledge and agree that,if they use any non-designated products in automotive applications,TI will not be responsible for any failure to meet such requirements.Following are URLs where you can obtain information on other Texas Instruments products and application solutions:Products ApplicationsAudio /audio Communications and Telecom /communicationsAmplifiers Computers and Peripherals /computersData Converters Consumer Electronics /consumer-appsDLP®Products Energy and Lighting /energyDSP Industrial /industrialClocks and Timers /clocks Medical /medicalInterface Security /securityLogic Space,Avionics and Defense /space-avionics-defense Power Mgmt Transportation and /automotiveAutomotiveMicrocontrollers Video and Imaging /videoRFID Wireless /wireless-appsRF/IF and ZigBee®Solutions /lprfTI E2E Community Home Page Mailing Address:Texas Instruments,Post Office Box655303,Dallas,Texas75265Copyright©2011,Texas Instruments Incorporated芯天下--/。
德州仪器(TI)LM3S1968规格书,Datasheet 资料

Stellaris® Development and Evaluation Kits for Red SuiteThe Stellaris Development and Evaluation Kits provide a low-cost way to start designing with Stellaris microcontrollers using Code Red Technologies’ Red Suite development tools. The boards can function as either a complete evaluation target or as a debugger interface to any external Stellaris device.RequirementsYou have a PC with a USB interface, running Microsoft® Windows XP (SP2 or greater) or VistaYou have the Stellaris Evaluation Kit Documentation and Software CD or the standalone Code Red CD found in the Development KitCAUTION: There is a known electrical issue with the FT2232 device that is used in theon-board In Circuit Debug Interface (ICDI). Some USB hubs can cause the device to misbehave, with symptoms ranging from failed enumeration to corrupt data transfers. If you experience trouble when using the on-board ICDI, try connecting the USB cable directly to one of the USB ports on your PC or laptop.Red SuiteThis quickstart shows you how to install the Red Suite development tool and how to use it to build and run an example application on your Stellaris Evaluation Board.Step 1: Install Red Suite1.Insert the Evaluation Kit Documentation and Software CD or the standalone Code RedCD into the CD-ROM drive of your computer. If Autoplay is enabled on your PC, the index.htm file is opened automatically in your default web browser. If Autoplay is not enabled, use Windows Explorer to open the CD manually.2.With the Evaluation Kit CD, click the Tools button and then click the Code Red logoto start the setup program. If the setup program does not start, use Windows Explorer to view the files on the CD and double-click the red_suite_n.n.n.exe file located in the “Tools\Code Red\” directory.With the standalone CD, follow the installer dialog.3.Follow the instructions in the Red Suite installation program. When you get to theDebug Driver Selection window, deselect the “NXP LPC-Line drivers” by clicking the checkbox. After you have clicked the checkbox, the window should look like this:4.Click the Next button to continue with the installation.5.Red Suite continues to install into a single directory of your choice. Unlike manysoftware packages, Red Suite does not install or use any keys in the WindowsRegistry, or use or modify any environment variables (including PATH), which results in a clean installation that does not interfere with anything else on your PC.Step 2: Install the StellarisWare® PackageA full set of C-based peripheral drivers is provided, covering all peripherals and functionality of the Stellaris devices. The StellarisWare package includes various example applications with project files for all major tool vendors that support Stellaris, including Code Red. To install StellarisWare components, follow these steps:1.Navigate to the Tools tab on the Evaluation Kit Documentation and Software CD, orto the Software tab on the Development Kit Documentation and Software CD.NOTE: If you are navigating the CD using Windows Explorer (or a similarapplication), go to the Tools/StellarisWare or Software/StellarisWare directories.2.Click on the 'Install' link next in the StellarisWare section (under Tools or Software) ofthe CD and run the StellarisWare installer. If you prefer to manually installStellarisWare, the installer is a self-extracting zip file that is located in theTools/StellarisWare directory. You can use a zip file extraction utility such as WinZip to manually extract the contents.3.To view the StellarisWare documentation, navigate to the installation directory andclick on the Stellaris Software User’s Guide PDF.Step 3: Start Red Suite and Open a Workspace1.Start the Red Suite IDE by selecting it from the Windows Start menu or clicking theRed Suite 2 icon installed on your desktop. When the IDE loads, it will ask you where to open the workspace folder:red_suite\workspace|2.The Workspace launcher defaults to the following path:C:\Documents and Settings\<username>\My Documents\red_suite\workspaceClick OK to use this default workspace location.3.If this is the first time you have run the Red Suite IDE, a dialog box may appear likethe one shown below. If the dialog appears, click OK to continue.4.The Red Suite IDE now opens with an empty workspace. Go to “Help > Productactivation” to request and activate your evaluation license.5.Follow the instructions to obtain and activate your evaluation license.Important: For the most recent version of the StellarisWare workspaces, check the /stellaris web site for the latest software updates.Step 4: Import and Build Example Projects1.Select the “Import…” option from the File menu in Red Suite.2.Another dialog box appears to let you select what to import. Click “General” toexpand all of the options and then click “Import project(s) from XML description.”Click the Next button when you are finished.3.On the next screen, browse to locate an XML file. The XML description files arelocated in the StellarisWare installation from Step 2, which by default isC:/StellarisWare. From here, the XML file is located in:StellarisWare\boards\{board_name}Select the cr_workspace.xml file and click on “Open”. Then click “Finish”.4. A new window opens containing all of the available projects for your board. You canimport them all to your workspace or select only the examples that you want. If you choose to select only a few examples, the top items must also be imported. These are the StellarisWare library projects, third-party applications, and utilities directories that some projects have dependencies on. In this example, you will only import the “hello”project.With the projects selected, click “OK.” The projects are then imported to your workspace and built.5.You will now see the projects listed in the Project Explorer. The projects willautomatically start to build. Wait for the projects to finish building before continuing.6.To rebuild an individual project, select the project you want to build by clicking anitem in the Project Explorer list. From the “Build and Settings” section of theQuickstart Panel in the bottom left of the Red Suite window, click “Build project‘<name>’ for Debug.” If this option is not visible, expand the “Build and Settings”section by clicking on the downward pointing arrows to the right of the title.Step 5: Debugging a Project1.You will have several example projects from which to choose for your evaluationboard. For an example, start with the hello project. Select the “hello” project in theProject Explorer pane then click “Debug project ‘hello’” from the “Debug and Run” section of the Quickstart Panel.2.You will be asked to select the executable to debug. Choose “Debug/hello.axf” thenpress OK.3.You may get the Windows Security Alert pop-up shown below. Click the Unblockbutton to continue. This is necessary for proper operation of the debugging interface.4.If this is the first time you have used the debugger, Red Suite will also prompt you toconfirm your prospective switch. Click the Yes button to continue.5.The Red Suite debugger automatically connects to your evaluation board, programsthe flash, and runs to the beginning of the main() function. From here, you canexamine and modify memory, program variables and processor registers, setbreakpoints, step, and other typical debugging activities. To run the program, select“Resume” from the Run menu.6.The application starts running, and you should see the text “Hello World!” output tothe display of the evaluation board.Step 6: Build and Run Additional Example ProgramsThere are several additional example projects listed in workspace. If you would like to build another example project, follow the above instructions to import the different projects into the workspace. The quickstart application that came preloaded on the evaluation board is theqs_xxxxx project listed with the examples.Creating a New ProjectOnce you have gone through the StellarisWare example applications, you may want to create your own project to start development. While you can always start with an existing, simple project, sometimes you may want to start fresh.The Code Red tools have a very nice project wizard that lets you create a variety of different project types, with all of the necessary hooks to StellarisWare. It also completely sets up the debug interface so that all you need to do is start writing software, without worrying about setting up your project correctly.To add a new project to your workspace (assuming you’re still using the example described above), go to File > New > C Project.Red Suite will prompt you with a dialog box asking for the type of project you want to create. You’ll focus on the executable project types for this example. In this list, you have 6 options for Stellaris microcontrollers. The simplest one to start with is the “LMI StellarisWare Project” because it provides all of the necessary hooks to StellarisWare drivers.Here, let’s create a new project called “my_project”. If you click Next, the tool will give you the option to automatically set up the hooks into the StellarisWare Graphics Library and USB Library if you need them. The default configuration (if you were to just click Finish instead of Next) sets all of these up for you.supports it), and if you would like to use a buffered (FIFO enabled) UART.You can then select the name of your source directory and choose whether or not you’d like the tool to create a main.c file and startup code for you. We suggest letting the tool do it to make it easy for you. You can also choose to create both Debug and Release versions of your code.Lastly, you select the device you’re using.With your project created, all you really need to do is add your code. The main.c file created for you already sets up the system clock and includes the header files to use the System Control module of the DriverLib. From here, you’re ready to go!ConclusionYou have now installed the Red Suite development tools and used them to build and load an example application on your Stellaris Evaluation Board. From here, you can experiment with the debugger or start creating your own application using the projects as examples. Red Suite has many powerful features to help you develop embedded applications. For further information on Red Suite, start with the “Red Suite Quickstart Guide” installed with the RedSuite tools.Copyright © 2009-2010 Texas Instruments, Inc. All rights reserved. Stellaris and StellarisWare are registered trademarks of Texas Instruments. ARM and Thumb are registered trademarks, and Cortex is a trademark of ARM Limited. Other names and brands may be claimed as the property of others.Texas Instruments108 Wild Basin Rd., Suite 350Austin, TX 78746 /stellarisRev. 1.9 6/1/2010ReferencesThe following references are included on the Stellaris Evaluation Kit Documentation and Software CD and are also available for download at /stellaris :Stellaris Evaluation Kit User's ManualStellarisWare Software , Order Number SW-LM3SStellarisWare Peripheral Driver Library User’s Guide , Order Number SW-DRL-UG In addition, the following website may be useful:Code Red Technologies website at IMPORTANT NOTICETexas Instruments Incorporated and its subsidiaries(TI)reserve the right to make corrections,modifications,enhancements,improvements, and other changes to its products and services at any time and to discontinue any product or service without notice.Customers should obtain the latest relevant information before placing orders and should verify that such information is current and complete.All products are sold subject to TI’s terms and conditions of sale supplied at the time of order acknowledgment.TI warrants performance of its hardware products to the specifications applicable at the time of sale in accordance with TI’s standard warranty.Testing and other quality control techniques are used to the extent TI deems necessary to support this warranty.Except where mandated by government requirements,testing of all parameters of each product is not necessarily performed.TI assumes no liability for applications assistance or customer product design.Customers are responsible for their products and applications using TI components.To minimize the risks associated with customer products and applications,customers should provide adequate design and operating safeguards.TI does not warrant or represent that any license,either express or implied,is granted under any TI patent right,copyright,mask work right, or other TI intellectual property right relating to any combination,machine,or process in which TI products or services are rmation published by TI regarding third-party products or services does not constitute a license from TI to use such products or services or a warranty or endorsement e of such information may require a license from a third party under the patents or other intellectual property of the third party,or a license from TI under the patents or other intellectual property of TI.Reproduction of TI information in TI data books or data sheets is permissible only if reproduction is without alteration and is accompanied by all associated warranties,conditions,limitations,and notices.Reproduction of this information with alteration is an unfair and deceptive business practice.TI is not responsible or liable for such altered rmation of third parties may be subject to additional restrictions.Resale of TI products or services with statements different from or beyond the parameters stated by TI for that product or service voids all express and any implied warranties for the associated TI product or service and is an unfair and deceptive business practice.TI is not responsible or liable for any such statements.TI products are not authorized for use in safety-critical applications(such as life support)where a failure of the TI product would reasonably be expected to cause severe personal injury or death,unless officers of the parties have executed an agreement specifically governing such use.Buyers represent that they have all necessary expertise in the safety and regulatory ramifications of their applications,and acknowledge and agree that they are solely responsible for all legal,regulatory and safety-related requirements concerning their products and any use of TI products in such safety-critical applications,notwithstanding any applications-related information or support that may be provided by TI.Further,Buyers must fully indemnify TI and its representatives against any damages arising out of the use of TI products in such safety-critical applications.TI products are neither designed nor intended for use in military/aerospace applications or environments unless the TI products are specifically designated by TI as military-grade or"enhanced plastic."Only products designated by TI as military-grade meet military specifications.Buyers acknowledge and agree that any such use of TI products which TI has not designated as military-grade is solely at the Buyer's risk,and that they are solely responsible for compliance with all legal and regulatory requirements in connection with such use. TI products are neither designed nor intended for use in automotive applications or environments unless the specific TI products are designated by TI as compliant with ISO/TS16949requirements.Buyers acknowledge and agree that,if they use any non-designated products in automotive applications,TI will not be responsible for any failure to meet such requirements.Following are URLs where you can obtain information on other Texas Instruments products and application solutions:Products ApplicationsAmplifiers Audio /audioData Converters Automotive /automotiveDLP®Products Communications and /communicationsTelecomDSP Computers and /computersPeripheralsClocks and Timers /clocks Consumer Electronics /consumer-appsInterface Energy /energyLogic Industrial /industrialPower Mgmt Medical /medicalMicrocontrollers Security /securityRFID Space,Avionics&/space-avionics-defenseDefenseRF/IF and ZigBee®Solutions /lprf Video and Imaging /videoWireless /wireless-appsMailing Address:Texas Instruments,Post Office Box655303,Dallas,Texas75265Copyright©2010,Texas Instruments Incorporated。
LM2940详细资料

LM2940/LM2940C1A Low Dropout RegulatorGeneral DescriptionThe LM2940/LM2940C positive voltage regulator features the ability to source 1A of output current with a dropout volt-age of typically 0.5V and a maximum of 1V over the entire temperature range.Furthermore,a quiescent current reduc-tion circuit has been included which reduces the ground cur-rent when the differential between the input voltage and the output voltage exceeds approximately 3V.The quiescent current with 1A of output current and an input-output differ-ential of 5V is therefore only 30mA.Higher quiescent cur-rents only exist when the regulator is in the dropout mode (V IN −V OUT ≤3V).Designed also for vehicular applications,the LM2940/LM2940C and all regulated circuitry are protected from re-verse battery installations or 2-battery jumps.During line transients,such as load dump when the input voltage canmomentarily exceed the specified maximum operating volt-age,the regulator will automatically shut down to protect both the internal circuits and the load.The LM2940/LM2940C cannot be harmed by temporary mirror-image in-sertion.Familiar regulator features such as short circuit and thermal overload protection are also provided.Featuresn Dropout voltage typically 0.5V @I O =1A n Output current in excess of 1An Output voltage trimmed before assembly n Reverse battery protectionn Internal short circuit current limit n Mirror image insertion protection nP +Product Enhancement testedTypical ApplicationOrdering InformationTemperatureRange Output VoltagePackage 5.08.09.01012150˚C ≤T A ≤125˚C LM2940CT-5.0LM2940CT-9.0LM2940CT-12LM2940CT-15TO-220LM2940CS-5.0LM2940CS-9.0LM2940CS-12LM2940CS-15TO-263−40˚C ≤T A ≤125˚C LM2940T-5.0LM2940T-8.0LM2940T-9.0LM2940T-10LM2940T-12TO-220LM2940S-5.0LM2940S-8.0LM2940S-9.0LM2940S-10LM2940S-12TO-263−40˚C ≤T A ≤85˚C LM2940IMP-5.0LM2940IMP-8.0LM2940IMP-9.0LM2940IMP-10LM2940IMP-12LM2940IMP-15SOT-223SOT-223Package MarkingL53BL54BL0EBL55BL56BL70B−55˚C ≤T A ≤125˚CLM2940K-5.0/883LM2940K-8.0/883LM2940K-12/883LM2940K-15/883TO-3The physical size of the SOT-223is too small to contain the full device part number.The package markings indicated are what will appear on the actual device.DS008822-3*Required if regulator is located far from power supply filter.**C OUT must be at least 22µF to maintain stability.May be increased without bound to maintain regulation during transients.Locate as close as possibleto the regulator.This capacitor must be rated over the same operating temperature range as the regulator and the ESR is critical;see curve.December 1997Absolute Maximum Ratings (Notes 2,1)If Military/Aerospace specified devices are required,please contact the National Semiconductor Sales Office/Distributors for availability and specifications.LM2940S,T,IMP ≤100ms 60V LM2940K/883≤20ms 40V LM2940CS,T ≤1ms 45V Internal Power Dissipation (Note 3)Internally Limited Maximum Junction Temperature 150˚C Storage Temperature Range −65˚C ≤T J ≤+150˚C Lead Temperature,Time for Wave Soldering TO-3(K)Package 300˚C,10sTO-220(T)Package260˚C,10s TO-263(S)Package 260˚C,4s SOT-223(IMP)Package 260˚C,4sESD Susceptibility (Note 4)2kVOperating Conditions (Note 1)Input Voltage26VTemperature Range LM2940K/883−55˚C ≤T A ≤125˚C LM2940T,LM2940S −40˚C ≤T A ≤125˚C LM2940CT,LM2940CS 0˚C ≤T A ≤125˚C LM2940IMP−40˚C ≤T A ≤85˚CElectrical CharacteristicsV IN =V O +5V,I O =1A,C O =22µF,unless otherwise specified.Boldface limits apply over the entire operating tempera-ture range of the indicated device.All other specifications apply for T A =T J =25˚COutput Voltage (V O )5V 8V UnitsLM2940LM2940/883LM2940LM2940/883ParameterConditionsTypLimit Limit TypLimit Limit (Note 5)(Note 6)(Note 5)(Note 6)6.25V ≤V IN ≤26V 9.4V ≤V IN ≤26VOutput Voltage 5mA ≤I O ≤1A 5.00 4.85/4.75 4.85/4.758.007.76/7.607.76/7.60V MIN 5.15/5.255.15/5.258.24/8.408.24/8.40V MAX Line Regulation V O +2V ≤V IN ≤26V,205040/50208050/80mV MAX I O =5mA Load Regulation50mA ≤I O ≤1A LM2940,LM2940/8833550/8050/1005580/13080/130mV MAXLM2940C35505580Output 100mADC and Impedance 20mArms,351000/1000551000/1000m Ωf O =120Hz Quiescent V O +2V ≤V IN ≤26V,CurrentI O =5mALM2940,LM2940/8831015/2015/201015/2015/20mA MAXLM2940C1015V IN =V O +5V,3045/6050/603045/6050/60mA MAX I O =1AOutput Noise 10Hz −100kHz,150700/7002401000/1000µV rmsVoltage I O =5mARipple Rejectionf O =120Hz,1V rms ,I O =100mA LM29407260/546654/48dB MINLM2940C72606654f O =1kHz,1V rms ,60/5054/48dB MIN I O =5mALong Term 2032mV/Stability 1000Hr Dropout Voltage I O =1A0.50.8/1.00.7/1.00.50.8/1.00.7/1.0V MAX I O =100mA 110150/200150/200110150/200150/200mV MAX Short Circuit Current(Note 7)1.91.61.5/1.31.91.61.6/1.3A MINElectrical Characteristics(Continued)V IN =V O +5V,I O =1A,C O =22µF,unless otherwise specified.Boldface limits apply over the entire operating tempera-ture range of the indicated device.All other specifications apply for T A =T J =25˚COutput Voltage (V O )5V 8V UnitsLM2940LM2940/883LM2940LM2940/883Parameter Conditions TypLimit Limit TypLimit Limit (Note 5)(Note 6)(Note 5)(Note 6)Maximum Line R O =100ΩV MINTransientLM2940,T ≤100ms7560/607560/60LM2940/883,T ≤20ms40/4040/40LM2940C,T ≤1ms 55455545Reverse Polarity R O =100ΩDC Input Voltage LM2940,LM2940/883−30−15/−15−15/−15−30−15/−15−15/−15V MINLM2940C −30−15−30−15Reverse Polarity R O =100ΩTransient Input LM2940,T ≤100ms −75−50/−50−75−50/−50V MINVoltageLM2940/883,T ≤20ms −45/−45−45/−45LM2940C,T ≤1ms−55−45/−45Electrical CharacteristicsV IN =V O +5V,I O =1A,C O =22µF,unless otherwise specified.Boldface limits apply over the entire operating tempera-ture range of the indicated device.All other specifications apply for T A =T J =25˚COutput Voltage (V O )9V 10VUnitsParameterConditionsTypLM2940TypLM2940Limit Limit (Note 5)(Note 5)10.5V ≤V IN ≤26V11.5V ≤V IN ≤26VOutput Voltage 5mA ≤I O ≤1A 9.008.73/8.5510.009.70/9.50V MIN 9.27/9.4510.30/10.50V MAX Line Regulation V O +2V ≤V IN ≤26V,209020100mV MAX I O =5mA Load Regulation50mA ≤I O ≤1A LM29406090/15065100/165mV MAXLM2940C6090Output Impedance100mADC and 20mArms,6065m Ωf O =120HzQuiescent V O +2V ≤V IN <26V,CurrentI O =5mA LM29401015/201015/20mA MAXLM2940C1015V IN =V O +5V,I O =1A3045/603045/60mA MAX Output Noise 10Hz −100kHz,270300µV rmsVoltage I O =5mARipple Rejectionf O =120Hz,1V rms ,I O =100mA LM29406452/466351/45dB MINLM2940C6452Long Term Stability3436mV/1000HrElectrical Characteristics(Continued)V IN =V O +5V,I O =1A,C O =22µF,unless otherwise specified.Boldface limits apply over the entire operating tempera-ture range of the indicated device.All other specifications apply for T A =T J =25˚COutput Voltage (V O )9V 10VUnitsParameter ConditionsTyp LM2940TypLM2940Limit Limit (Note 5)(Note 5)Dropout Voltage I O =1A0.50.8/1.00.50.8/1.0V MAX I O =100mA 110150/200110150/200mV MAX Short Circuit (Note 7)1.91.61.9 1.6A MIN Current Maximum Line R O =100ΩTransientT ≤100ms LM29407560/607560/60V MINLM2940C 5545Reverse Polarity R O =100ΩDC Input Voltage LM2940−30−15/−15−30−15/−15V MINLM2940C −30−15Reverse Polarity R O =100ΩTransient Input T ≤100ms VoltageLM2940−75−50/−50−75−50/−50V MINLM2940C−55−45/−45Electrical CharacteristicsV IN =V O +5V,I O =1A,C O =22µF,unless otherwise specified.Boldface limits apply over the entire operating tempera-ture range of the indicated device.All other specifications apply for T A =T J =25˚COutput Voltage (V O )12V 15V UnitsLM2940LM2940/833LM2940LM2940/833ParameterConditionsTypLimit Limit TypLimit Limit (Note 5)(Note 6)(Note 5)(Note 6)13.6V ≤V IN ≤26V 16.75V ≤V IN ≤26VOutput Voltage 5mA ≤I O ≤1A 12.0011.64/11.4011.64/11.4015.0014.55/14.2514.55/14.25V MIN 12.36/12.6012.36/12.6015.45/15.7515.45/15.75V MAX Line Regulation V O +2V ≤V IN ≤26V,2012075/1202015095/150mV MAX I O =5mA Load Regulation50mA ≤I O ≤1A LM2940,LM2940/88355120/200120/190150/240mV MAXLM2940C5512070150Output 100mADC and Impedance 20mArms,801000/10001001000/1000m Ωf O =120Hz Quiescent CurrentV O +2V ≤V IN ≤26V,I O =5mALM2940,LM2940/8831015/2015/2015/20mA MAXLM2940C10151015V IN =V O +5V,I O =1A3045/6050/603045/6050/60mA MAX Output Noise 10Hz −100kHz,3601000/10004501000/1000µV rmsVoltageI O =5mAElectrical Characteristics(Continued)V IN =V O +5V,I O =1A,C O =22µF,unless otherwise specified.Boldface limits apply over the entire operating tempera-ture range of the indicated device.All other specifications apply for T A =T J =25˚COutput Voltage (V O )12V 15V UnitsLM2940LM2940/833LM2940LM2940/833Parameter Conditions TypLimit Limit TypLimit Limit (Note 5)(Note 6)(Note 5)(Note 6)Ripple Rejectionf O =120Hz,1V rms ,I O =100mA LM29406654/48dB MIN LM2940C66546452f O =1kHz,1V rms ,52/4648/42dB MIN I O =5mALong Term 4860mV/Stability 1000Hr Dropout Voltage I O =1A0.50.8/1.00.7/1.00.50.8/1.00.7/1.0V MAX I O =100mA 110150/200150/200110150/200150/200mV MAX Short Circuit (Note 7)1.91.61.6/1.31.91.61.6/1.3A MINCurrent Maximum Line R O =100ΩTransientLM2940,T ≤100ms 7560/60LM2940/883,T ≤20ms40/4040/40V MINLM2940C,T ≤1ms 55455545Reverse Polarity R O =100ΩDC Input LM2940,LM2940/883−30−15/−15−15/−15−15/−15V MINVoltage LM2940C −30−15−30−15Reverse Polarity R O =100ΩTransient Input LM2940,T ≤100ms −75−50/−50VoltageLM2940/883,T ≤20ms −45/−45−45/−45V MINLM2940C,T ≤1ms −55−45/−45−55−45/−45Note 1:Absolute Maximum Ratings are limits beyond which damage to the device may occur.Operating Conditions are conditions under which the device functions but the specifications might not be guaranteed.For guaranteed specifications and test conditions see the Electrical Characteristics.Note 2:Military specifications complied with RETS/SMD at the time of printing.For current specifications refer to RETS LM2940K-5.0,LM2940K-8.0,LM2940K-12,and LM2940K-15.SMD numbers are 5962-8958701YA(5V),5962-9083301YA(8V),5962-9088401YA(12V),and 5962-9088501YA(15V).Note 3:The maximum allowable power dissipation is a function of the maximum junction temperature,T J ,the junction-to-ambient thermal resistance,θJ−A ,and the ambient temperature,T A .Exceeding the maximum allowable power dissipation will cause excessive die temperature,and the regulator will go into thermal shutdown.The value of θJ−A (for devices in still air with no heatsink)is 60˚C/W for the TO-220package,80˚C/W for the TO-263package,and 174˚C/W for the SOT-223package.The effective value of θJ−A can be reduced by using a heatsink (see Application Hints for specific information on heatsinking).The values of θJ−A and θJ−C for the K02A package are 39˚C/W and 4˚C/W respectively.Note 4:ESD rating is based on the human body model,100pF discharged through 1.5k Ω.Note 5:All limits are guaranteed at T A =T J =25˚C only (standard typeface)or over the entire operating temperature range of the indicated device (boldface type).All limits at T A =T J =25˚C are 100%production tested.All limits at temperature extremes are guaranteed via correlation using standard Statistical Quality Control methods.Note 6:All limits are guaranteed at T A =T J =25˚C only (standard typeface)or over the entire operating temperature range of the indicated device (boldface type).All limits are 100%production tested and are used to calculate Outgoing Quality Levels.Note 7:Output current will decrease with increasing temperature but will not drop below 1A at the maximum specified temperature.Typical Performance CharacteristicsDropout VoltageDS008822-13Dropout Voltage vs TemperatureDS008822-14Output Voltage vs TemperatureDS008822-15Quiescent Current vs TemperatureDS008822-16Quiescent Current DS008822-17Quiescent CurrentDS008822-18Line Transient Response DS008822-19Load Transient Response DS008822-20Ripple RejectionDS008822-21Typical Performance Characteristics(Continued)Output ImpedanceDS008822-22Maximum Power Dissipation (TO-220)DS008822-23Maximum Power Dissipation (TO-3)DS008822-24Maximum Power Dissipation (TO-263)See (Note 3)DS008822-10Typical Performance Characteristics(Continued)Low Voltage BehaviorDS008822-25Low Voltage BehaviorDS008822-26Low Voltage BehaviorDS008822-27Low Voltage BehaviorDS008822-28Low Voltage BehaviorDS008822-29Low Voltage BehaviorDS008822-30Output atVoltage ExtremesDS008822-31Output atVoltage ExtremesDS008822-32Output atVoltage ExtremesDS008822-33Output atVoltage ExtremesDS008822-34Output atVoltage ExtremesDS008822-35Output atVoltage ExtremesDS008822-36Typical Performance Characteristics(Continued)Equivalent Schematic DiagramApplication HintsEXTERNAL CAPACITORSThe output capacitor is critical to maintaining regulator stabil-ity,and must meet the required conditions for both ESR (Equivalent Series Resistance)and minimum amount of ca-pacitance.MINIMUM CAPACITANCE:The minimum output capacitance required to maintain stabil-ity is 22µF (this value may be increased without limit).Larger values of output capacitance will give improved tran-sient response.ESR LIMITS:The ESR of the output capacitor will cause loop instability if it is too high or too low.The acceptable range of ESR plotted versus load current is shown in the graph below.It is essen-tial that the output capacitor meet these requirements,or oscillations can result.Output Capacitor ESRDS008822-6Peak Output CurrentDS008822-8DS008822-1Application Hints(Continued)It is important to note that for most capacitors,ESR is speci-fied only at room temperature.However,the designer must ensure that the ESR will stay inside the limits shown over the entire operating temperature range for the design.For aluminum electrolytic capacitors,ESR will increase by about30X as the temperature is reduced from25˚C to −40˚C.This type of capacitor is not well-suited for low tem-perature operation.Solid tantalum capacitors have a more stable ESR over tem-perature,but are more expensive than aluminum electrolyt-ics.A cost-effective approach sometimes used is to parallel an aluminum electrolytic with a solid Tantalum,with the total capacitance split about75/25%with the Aluminum being the larger value.If two capacitors are paralleled,the effective ESR is the par-allel of the two individual values.The“flatter”ESR of the Tan-talum will keep the effective ESR from rising as quickly at low temperatures.HEATSINKINGA heatsink may be required depending on the maximum power dissipation and maximum ambient temperature of the application.Under all possible operating conditions,the junc-tion temperature must be within the range specified under Absolute Maximum Ratings.To determine if a heatsink is required,the power dissipated by the regulator,P D,must be calculated.The figure below shows the voltages and currents which are present in the circuit,as well as the formula for calculating the power dissipated in the regulator:The next parameter which must be calculated is the maxi-mum allowable temperature rise,T R(max).This is calcu-lated by using the formula:T R(max)=T J(max)−T A(max)where:T J(max)is the maximum allowable junction tem-perature,which is125˚C for commercialgrade parts.T A(max)is the maximum ambient temperaturewhich will be encountered in the applica-tion.Using the calculated values for T R(max)and P D,the maxi-mum allowable value for the junction-to-ambient thermal re-sistance,θ(J−A),can now be found:θ(J−A)=T R(max)/P DIMPORTANT:If the maximum allowable value forθ(J−A)is found to be≥53˚C/W for the TO-220package,≥80˚C/W for the TO-263package,or≥174˚C/W for the SOT-223pack-age,no heatsink is needed since the package alone will dis-sipate enough heat to satisfy these requirements.If the calculated value forθ(J−A)falls below these limits,a heatsink is required.HEATSINKING TO-220PACKAGE PARTSThe TO-220can be attached to a typical heatsink,or se-cured to a copper plane on a PC board.If a copper plane is to be used,the values ofθ(J−A)will be the same as shown in the next section for the TO-263.If a manufactured heatsink is to be selected,the value of heatsink-to-ambient thermal resistance,θ(H−A),must first be calculated:θ(H−A)=θ(J−A)−θ(C−H)−θ(J−C)Where:θ(J−C)is defined as the thermal resistance fromthe junction to the surface of the case.Avalue of3˚C/W can be assumed forθ(J−C)for this calculation.θ(C−H)is defined as the thermal resistance be-tween the case and the surface of the heat-sink.The value ofθ(C−H)will vary fromabout1.5˚C/W to about2.5˚C/W(depend-ing on method of attachment,insulator,etc.).If the exact value is unknown,2˚C/Wshould be assumed forθ(C−H).When a value forθ(H−A)is found using the equation shown, a heatsink must be selected that has a value that is less than or equal to this number.θ(H−A)is specified numerically by the heatsink manufacturer in the catalog,or shown in a curve that plots temperature rise vs power dissipation for the heatsink.Output Capacitor ESRDS008822-6 FIGURE1.ESR LimitsDS008822-37 I IN=I L÷I GP D=(V IN−V OUT)I L+(V IN)I GFIGURE2.Power Dissipation DiagramApplication Hints(Continued)HEATSINKING TO-263AND SOT-223PACKAGE PARTS Both the TO-263(“S”)and SOT-223(“MP”)packages use a copper plane on the PCB and the PCB itself as a heatsink. To optimize the heat sinking ability of the plane and PCB, solder the tab of the package to the plane.Figure3shows for the TO-263the measured values ofθ(J−A) for different copper area sizes using a typical PCB with1 ounce copper and no solder mask over the copper area used for heatsinking.As shown in the figure,increasing the copper area beyond1 square inch produces very little improvement.It should also be observed that the minimum value ofθ(J−A)for the TO-263 package mounted to a PCB is32˚C/W.As a design aid,Figure4shows the maximum allowable power dissipation compared to ambient temperature for the TO-263device(assumingθ(J−A)is35˚C/W and the maxi-mum junction temperature is125˚C).Figure5and Figure6show the information for the SOT-223 package.Figure6assumes aθ(J−A)of74˚C/W for1ounce copper and51˚C/W for2ounce copper and a maximum junction temperature of125˚C.Please see AN1028for power enhancement techniques to be used with the SOT-223package.DS008822-38 FIGURE3.θ(J−A)vs Copper(1ounce)Area for theTO-263PackageDS008822-39 FIGURE4.Maximum Power Dissipation vs T AMB forthe TO-263PackageDS008822-40 FIGURE5.θ(J−A)vs Copper(2ounce)Area for theSOT-223PackageDS008822-41 FIGURE6.Maximum Power Dissipation vs T AMB forthe SOT-223PackageConnection Diagrams(TO-220)Plastic PackageDS008822-2Front ViewOrder Number LM2940CT-5.0,LM2940CT-9.0,LM2940CT-12,LM2940CT-15,LM2940T-5.0,LM2940T-8.0,LM2940T-9.0,LM2940T-10or LM2940T-12See NS Package Number TO3BTO-3Metal Can Package(K)DS008822-7Bottom ViewOrder Number LM2940K-5.0/883,LM2940K-8.0/883,LM2940K-12/883,LM2940K-15/883 See NS Package Number K02AConnection Diagrams(Continued)(TO-263)Surface-Mount PackageDS008822-11Top ViewDS008822-12Side ViewOrder Number LM2940CS-5.0,LM2940CS-9.0,LM2940CS-12,LM2940CS-15,LM2940S-5.0,LM2940S-8.0,LM2940S-9.0,LM2940S-10or LM2940S-12See NS Package Number TS3B3-Lead SOT-223DS008822-42(Front View)Order Part Number LM2940IMP-5.0LM2940IMP-8.0LM2940IMP-9.0LM2940IMP-10LM2940IMP-12LM2940IMP-15 See NS Package Number MA04APhysical Dimensions inches(millimeters)unless otherwise noted3-Lead SOT-223PackageOrder Part Number LM2940IMP-5.0LM2940IMP-8.0LM2940IMP-9.0LM2940IMP-10LM2940IMP-12LM2940IMP-15NS Package Number MA04APhysical Dimensions inches(millimeters)unless otherwise noted(Continued)2Lead TO-3Metal Can Package(K)Order Number LM2940K-5.0/883,LM2940K-8.0/883,LM2940K-12/883,LM2940K-15/883NS Package Number K02APhysical Dimensions inches(millimeters)unless otherwise noted(Continued)3-Lead TO-220Plastic Package(T)Order Number LM2940T-5.0,LM2940T-8.0,LM2940T-9.0,LM2940T-10,LM2940T-12,LM2940CT-5.0,LM2940CT-12or LM2940CT-15NS Package Number TO3BPhysical Dimensions inches(millimeters)unless otherwise noted(Continued)3-Lead TO-263Surface Mount PackageOrder Number LM2940S-5.0,LM2940S-8.0,LM2940S-9.0,LM2940S-10,LM2940S-12,LM2940CS-5.0,LM2940CS-12or LM2940CS-15NS Package Number TS3B。
德州仪器LM193 LM293 LM393 LM2903电压比较器

LM193-N,LM2903-N,LM293-N,LM393-N SNOSBJ6E–OCTOBER1999–REVISED MARCH2013 LM193/LM293/LM393/LM2903Low Power Low Offset Voltage Dual ComparatorsCheck for Samples:LM193-N,LM2903-N,LM293-N,LM393-NFEATURES DESCRIPTIONThe LM193series consists of two independent •Wide Supplyprecision voltage comparators with an offset voltage –Voltage Range:2.0V to36V specification as low as 2.0mV max for two–Single or Dual Supplies:±1.0V to±18V comparators which were designed specifically tooperate from a single power supply over a wide range •Very Low Supply Current Drain(0.4mA)—of voltages.Operation from split power supplies is Independent of Supply Voltagealso possible and the low power supply current drain •Low Input Biasing Current:25nA is independent of the magnitude of the power supply•Low Input Offset Current:±5nA voltage.These comparators also have a uniquecharacteristic in that the input common-mode voltage •Maximum Offset voltage:±3mVrange includes ground,even though operated from a •Input Common-Mode Voltage Range Includessingle power supply voltage.GroundApplication areas include limit comparators,simple •Differential Input Voltage Range Equal to theanalog to digital converters;pulse,squarewave and Power Supply Voltagetime delay generators;wide range VCO;MOS clock •Low Output Saturation Voltage:250mV at4timers;multivibrators and high voltage digital logic mA gates.The LM193series was designed to directlyinterface with TTL and CMOS.When operated from •Output Voltage Compatible with TTL,DTL,both plus and minus power supplies,the LM193 ECL,MOS and CMOS logic systemsseries will directly interface with MOS logic where •Available in the8-Bump(12mil)DSBGA their low power drain is a distinct advantage over Package standard comparators.•See AN-1112(SNVA009)for DSBGAThe LM393and LM2903parts are available in TI’s Considerationsinnovative thin DSBGA package with8(12mil)largebumps.ADVANTAGES•High Precision Comparators•Reduced V OS Drift Over Temperature•Eliminates Need for Dual Supplies•Allows Sensing Near Ground•Compatible with All Forms of Logic•Power Drain Suitable for Battery OperationFigure1.Squarewave Oscillator Figure2.Non-Inverting Comparator withHysteresisPlease be aware that an important notice concerning availability,standard warranty,and use in critical applications ofTexas Instruments semiconductor products and disclaimers thereto appears at the end of this data sheet.All trademarks are the property of their respective owners.PRODUCTION DATA information is current as of publication date.Copyright©1999–2013,Texas Instruments Incorporated Products conform to specifications per the terms of the TexasLM193-N,LM2903-N,LM293-N,LM393-NSNOSBJ6E–OCTOBER1999–REVISED Schematic and Connection DiagramsFigure3.SchematicFigure4.TO-99Package Figure5.CDIP,PDIP,SOIC PackagesFigure6.DSBGA Top ViewThese devices have limited built-in ESD protection.The leads should be shorted together or the device placed in conductive foam during storage or handling to prevent electrostatic damage to the MOS gates.2Submit Documentation Feedback Copyright©1999–2013,Texas Instruments IncorporatedLM193-N,LM2903-N,LM293-N,LM393-N SNOSBJ6E–OCTOBER1999–REVISED MARCH2013Absolute Maximum Ratings(1)(2)Supply Voltage,V+36V Differential Input Voltage(3)36V Input Voltage−0.3V to+36V Input Current(V IN<−0.3V)(4)50mA Power Dissipation(5)PDIP780mW TO-99660mW SOIC Package510mW DSBGA Package568mW Output Short-Circuit to Ground(6)Continuous Operating Temperature RangeLM3930°C to+70°C LM293−25°C to+85°C LM193/LM193A−55°C to+125°C LM2903−40°C to+85°C Storage Temperature Range−65°C to+150°C Lead Temperature(Soldering,10seconds)+260°C Soldering InformationCDIP,PDIP Package Soldering(10seconds)260°C SOIC Package215°C Vapor Phase(60seconds)Infrared(15seconds)220°C See AN-450“Surface Mounting Methods and Their Effect on Product Reliability”for other methods of soldering surface mount devices.ESD rating(1.5kΩin series with100pF)1300V(1)Refer to RETS193AX for LM193AH military specifications and to RETS193X for LM193H military specifications.(2)If Military/Aerospace specified devices are required,please contact the TI Sales Office/Distributors for availability and specifications.(3)Positive excursions of input voltage may exceed the power supply level.As long as the other voltage remains within the common-moderange,the comparator will provide a proper output state.The low input voltage state must not be less than−0.3V(or0.3V below the magnitude of the negative power supply,if used).(4)This input current will only exist when the voltage at any of the input leads is driven negative.It is due to the collector-base junction ofthe input PNP transistors becoming forward biased and thereby acting as input diode clamps.In addition to this diode action,there is also lateral NPN parasitic transistor action on the IC chip.This transistor action can cause the output voltages of the comparators to go to the V+voltage level(or to ground for a large overdrive)for the time duration that an input is driven negative.This is not destructive and normal output states will re-establish when the input voltage,which was negative,again returns to a value greater than−0.3V. (5)For operating at high temperatures,the LM393and LM2903must be derated based on a125°C maximum junction temperature and athermal resistance of170°C/W which applies for the device soldered in a printed circuit board,operating in a still air ambient.The LM193/LM193A/LM293must be derated based on a150°C maximum junction temperature.The low bias dissipation and the“ON-OFF”characteristic of the outputs keeps the chip dissipation very small(P D≤100mW),provided the output transistors are allowed to saturate.(6)Short circuits from the output to V+can cause excessive heating and eventual destruction.When considering short circuits to ground,the maximum output current is approximately20mA independent of the magnitude of V+.Copyright©1999–2013,Texas Instruments Incorporated Submit Documentation Feedback3LM193-N,LM2903-N,LM293-N,LM393-NSNOSBJ6E–OCTOBER1999–REVISED Electrical Characteristics(V+=5V,T A=25°C,unless otherwise stated)LM193A Parameter Test Conditions UnitsMin Typ MaxInput Offset Voltage(1) 1.0 2.0mV Input Bias Current I IN(+)or I IN(−)with Output In Linear25100nARange,V CM=0V(2)Input Offset Current I IN(+)−I IN(−)V CM=0V 3.025nA Input Common Mode Voltage Range V+=30V(3)0V+−1.5V Supply Current R L=∞V+=5V0.41mAV+=36V1 2.5mA Voltage Gain R L≥15kΩ,V+=15V50200V/mVV O=1V to11VLarge Signal Response Time V IN=TTL Logic Swing,V REF=1.4V300nsV RL=5V,R L=5.1kΩResponse Time V RL=5V,R L=5.1kΩ(4) 1.3μs Output Sink Current V IN(−)=1V,V IN(+)=0,V O≈1.5V 6.016mA Saturation Voltage V IN(−)=1V,V IN(+)=0,I SINK≤4mA250400mV Output Leakage Current V IN(−)=0,V IN(+)=1V,V O=5V0.1nA(1)At output switch point,V O≃1.4V,R S=0Ωwith V+from5V to30V;and over the full input common-mode range(0V to V+−1.5V),at25°C.(2)The direction of the input current is out of the IC due to the PNP input stage.This current is essentially constant,independent of thestate of the output so no loading change exists on the reference or input lines.(3)The input common-mode voltage or either input signal voltage should not be allowed to go negative by more than0.3V.The upper endof the common-mode voltage range is V+−1.5V at25°C,but either or both inputs can go to36V without damage,independent of the magnitude of V+.(4)The response time specified is for a100mV input step with5mV overdrive.For larger overdrive signals300ns can be obtained,seeTypical Performance Characteristics.Electrical Characteristics(V+=5V,T A=25°C,unless otherwise stated)LM193LM293,LM393LM2903 Parameter Test Conditions UnitsMin Typ Max Min Typ Max Min Typ MaxInput Offset Voltage(1) 1.0 5.0 1.0 5.0 2.07.0mV Input Bias Current I IN(+)or I IN(−)with Output In251002525025250nA Linear Range,V CM=0V(2)Input Offset Current I IN(+)−I IN(−)V CM=0V 3.025 5.050 5.050nA Input Common Mode V+=30V(3)0V+−1.50V+−1.50V+−1.5V Voltage RangeSupply Current R L=∞V+=5V0.410.410.4 1.0mAV+=36V1 2.51 2.51 2.5mA Voltage Gain R L≥15kΩ,V+=15V502005020025100V/mV V O=1V to11VLarge Signal Response V IN=TTL Logic Swing,V REF=1.4V300300300ns Time V RL=5V,R L=5.1kΩResponse Time V RL=5V,R L=5.1kΩ(4) 1.3 1.3 1.5μs Output Sink Current V IN(−)=1V,V IN(+)=0,V O≤1.5V 6.016 6.016 6.016mA Saturation Voltage V IN(−)=1V,V IN(+)=0,I SINK≤4mA250400250400250400mV Output Leakage Current V IN(−)=0,V IN(+)=1V,V O=5V0.10.10.1nA(1)At output switch point,V O≃1.4V,R S=0Ωwith V+from5V to30V;and over the full input common-mode range(0V to V+−1.5V),at25°C.(2)The direction of the input current is out of the IC due to the PNP input stage.This current is essentially constant,independent of thestate of the output so no loading change exists on the reference or input lines.(3)The input common-mode voltage or either input signal voltage should not be allowed to go negative by more than0.3V.The upper endof the common-mode voltage range is V+−1.5V at25°C,but either or both inputs can go to36V without damage,independent of the magnitude of V+.(4)The response time specified is for a100mV input step with5mV overdrive.For larger overdrive signals300ns can be obtained,seeTypical Performance Characteristics.4Submit Documentation Feedback Copyright©1999–2013,Texas Instruments IncorporatedLM193-N,LM2903-N,LM293-N,LM393-N SNOSBJ6E–OCTOBER1999–REVISED MARCH2013Electrical Characteristics(V+=5V)(1)LM193A Parameter Test Conditions UnitsMin Typ MaxInput Offset Voltage(2) 4.0mV Input Offset Current I IN(+)−I IN(−),V CM=0V100nAInput Bias Current I IN(+)or I IN(−)with Output in Linear Range,300nAV CM=0V(3)Input Common Mode Voltage Range V+=30V(4)0V+−2.0V Saturation Voltage V IN(−)=1V,V IN(+)=0,I SINK≤4mA700mV Output Leakage Current V IN(−)=0,V IN(+)=1V,V O=30V 1.0μA Differential Input Voltage Keep All V IN's≥0V(or V−,if Used),(5)36V (1)These specifications are limited to−55°C≤T A≤+125°C,for the LM193/LM193A.With the LM293all temperature specifications are limitedto−25°C≤T A≤+85°C and the LM393temperature specifications are limited to0°C≤T A≤+70°C.The LM2903is limited to−40°C≤T A≤+85°C.(2)At output switch point,V O≃1.4V,R S=0Ωwith V+from5V to30V;and over the full input common-mode range(0V to V+−1.5V),at25°C.(3)The direction of the input current is out of the IC due to the PNP input stage.This current is essentially constant,independent of thestate of the output so no loading change exists on the reference or input lines.(4)The input common-mode voltage or either input signal voltage should not be allowed to go negative by more than0.3V.The upper endof the common-mode voltage range is V+−1.5V at25°C,but either or both inputs can go to36V without damage,independent of the magnitude of V+.(5)Positive excursions of input voltage may exceed the power supply level.As long as the other voltage remains within the common-moderange,the comparator will provide a proper output state.The low input voltage state must not be less than−0.3V(or0.3V below the magnitude of the negative power supply,if used).Electrical Characteristics(V+=5V)(1)LM193LM293,LM393LM2903 Parameter Test Conditions UnitsMin Typ Max Min Typ Max Min Typ MaxInput Offset Voltage(2)99915mV Input Offset Current I IN(+)−I IN(−),V CM=0V10015050200nA Input Bias Current I IN(+)or I IN(−)with Output in Linear300400200500nA Range,V CM=0V(3)Input Common Mode V+=30V(4)0V+−2.00V+−2.00V+−2.0V Voltage RangeSaturation Voltage V IN(−)=1V,V IN(+)=0,700700400700mVI SINK≤4mAOutput Leakage Current V IN(−)=0,V IN(+)=1V,V O=30V 1.0 1.0 1.0μA Differential Input Voltage Keep All V IN's≥0V(or V−,if Used),363636V(5)(1)These specifications are limited to−55°C≤T A≤+125°C,for the LM193/LM193A.With the LM293all temperature specifications are limitedto−25°C≤T A≤+85°C and the LM393temperature specifications are limited to0°C≤T A≤+70°C.The LM2903is limited to−40°C≤T A≤+85°C.(2)At output switch point,V O≃1.4V,R S=0Ωwith V+from5V to30V;and over the full input common-mode range(0V to V+−1.5V),at25°C.(3)The direction of the input current is out of the IC due to the PNP input stage.This current is essentially constant,independent of thestate of the output so no loading change exists on the reference or input lines.(4)The input common-mode voltage or either input signal voltage should not be allowed to go negative by more than0.3V.The upper endof the common-mode voltage range is V+−1.5V at25°C,but either or both inputs can go to36V without damage,independent of the magnitude of V+.(5)Positive excursions of input voltage may exceed the power supply level.As long as the other voltage remains within the common-moderange,the comparator will provide a proper output state.The low input voltage state must not be less than−0.3V(or0.3V below the magnitude of the negative power supply,if used).Copyright©1999–2013,Texas Instruments Incorporated Submit Documentation Feedback5LM193-N,LM2903-N,LM293-N,LM393-NSNOSBJ6E –OCTOBER 1999–REVISED MARCH 2013Typical Performance CharacteristicsLM193/LM293/LM393,LM193ASupply CurrentInput CurrentFigure 7.Figure 8.Response Time for Various Input Overdrives—NegativeOutput Saturation VoltageTransitionFigure 9.Figure 10.Response Time for Various Input Overdrives—Positive TransitionFigure 11.6Submit Documentation Feedback Copyright ©1999–2013,Texas Instruments IncorporatedLM193-N,LM2903-N,LM293-N,LM393-NSNOSBJ6E –OCTOBER 1999–REVISED MARCH 2013Typical Performance CharacteristicsLM2903Supply CurrentInput CurrentFigure 12.Figure 13.Response Time for Various Input Overdrives—NegativeOutput Saturation VoltageTransitionFigure 14.Figure 15.Response Time for Various Input Overdrives—Positive TransitionFigure 16.Copyright ©1999–2013,Texas Instruments Incorporated Submit Documentation Feedback 7LM193-N,LM2903-N,LM293-N,LM393-NSNOSBJ6E–OCTOBER1999–REVISED APPLICATION HINTSThe LM193series are high gain,wide bandwidth devices which,like most comparators,can easily oscillate if the output lead is inadvertently allowed to capacitively couple to the inputs via stray capacitance.This shows up only during the output voltage transition intervals as the comparator change states.Power supply bypassing is not required to solve this problem.Standard PC board layout is helpful as it reduces stray input-output coupling. Reducing the input resistors to<10kΩreduces the feedback signal levels and finally,adding even a small amount(1.0to10mV)of positive feedback(hysteresis)causes such a rapid transition that oscillations due to stray feedback are not possible.Simply socketing the IC and attaching resistors to the pins will cause input-output oscillations during the small transition intervals unless hysteresis is used.If the input signal is a pulse waveform,with relatively fast rise and fall times,hysteresis is not required.All input pins of any unused comparators should be tied to the negative supply.The bias network of the LM193series establishes a drain current which is independent of the magnitude of the power supply voltage over the range of from2.0V DC to30V DC.It is usually unnecessary to use a bypass capacitor across the power supply line.The differential input voltage may be larger than V+without damaging the device(1).Protection should be provided to prevent the input voltages from going negative more than−0.3V DC(at25°C).An input clamp diode can be used as shown in Typical Applications.The output of the LM193series is the uncommitted collector of a grounded-emitter NPN output transistor.Many collectors can be tied together to provide an output OR'ing function.An output pull-up resistor can be connected to any available power supply voltage within the permitted supply voltage range and there is no restriction on this voltage due to the magnitude of the voltage which is applied to the V+terminal of the LM193package.The output can also be used as a simple SPST switch to ground(when a pull-up resistor is not used).The amount of current which the output device can sink is limited by the drive available(which is independent of V+)and theβof this device.When the maximum current limit is reached(approximately16mA),the output transistor will come out of saturation and the output voltage will rise very rapidly.The output saturation voltage is limited by the approximately60Ωr SAT of the output transistor.The low offset voltage of the output transistor(1.0mV)allows the output to clamp essentially to ground level for small load currents.Typical Applications(V+=5.0V DC)Figure17.Basic Comparator Figure18.Driving CMOS(1)Positive excursions of input voltage may exceed the power supply level.As long as the other voltage remains within the common-moderange,the comparator will provide a proper output state.The low input voltage state must not be less than−0.3V(or0.3V below the magnitude of the negative power supply,if used).8Submit Documentation Feedback Copyright©1999–2013,Texas Instruments IncorporatedLM193-N,LM2903-N,LM293-N,LM393-N SNOSBJ6E–OCTOBER1999–REVISED MARCH2013 (V+=5.0V DC)Figure19.Driving TTL Figure20.Squarewave Oscillator *For large ratios of R1/R2,D1can be omitted.Figure21.Pulse Generator Figure22.Crystal Controlled OscillatorV*=+30V DC+250mV DC≤V C≤+50V DC700Hz≤f o≤100kHzFigure23.Two-Decade High Frequency VCOCopyright©1999–2013,Texas Instruments Incorporated Submit Documentation Feedback9LM193-N,LM2903-N,LM293-N,LM393-NSNOSBJ6E–OCTOBER1999–REVISED (V+=5.0V DC)Figure24.Basic Comparator Figure25.Non-Inverting Comparator withHysteresisFigure26.Inverting Comparator with Hysteresis Figure27.Output StrobingFigure28.AND Gate Figure29.OR Gate10Submit Documentation Feedback Copyright©1999–2013,Texas Instruments IncorporatedLM193-N,LM2903-N,LM293-N,LM393-N SNOSBJ6E–OCTOBER1999–REVISED MARCH2013 (V+=5.0V DC)rge Fan-in AND Gate Figure31.Limit Comparatorparing Input Voltages of Opposite Figure33.ORing the OutputsPolarityFigure34.Zero Crossing Detector(Single Power Figure35.One-Shot MultivibratorSupply)Copyright©1999–2013,Texas Instruments Incorporated Submit Documentation Feedback11LM193-N,LM2903-N,LM293-N,LM393-NSNOSBJ6E–OCTOBER1999–REVISED (V+=5.0V DC)Figure36.Bi-Stable Multivibrator Figure37.One-Shot Multivibrator with Input LockOutFigure38.Zero Crossing Detector parator With a Negative ReferenceFigure40.Time Delay Generator12Submit Documentation Feedback Copyright©1999–2013,Texas Instruments IncorporatedLM193-N,LM2903-N,LM293-N,LM393-N SNOSBJ6E–OCTOBER1999–REVISED MARCH2013(V+=5.0V DC)Split-Supply Applications(V+=+15V DC and V−=−15V DC)Figure41.MOS Clock DriverCopyright©1999–2013,Texas Instruments Incorporated Submit Documentation Feedback13LM193-N,LM2903-N,LM293-N,LM393-NSNOSBJ6E–OCTOBER1999–REVISED REVISION HISTORYChanges from Revision D(March2013)to Revision E Page •Changed layout of National Data Sheet to TI format (13)14Submit Documentation Feedback Copyright©1999–2013,Texas Instruments IncorporatedPACKAGING INFORMATIONAddendum-Page 1(1) The marketing status values are defined as follows:ACTIVE: Product device recommended for new designs.LIFEBUY: TI has announced that the device will be discontinued, and a lifetime-buy period is in effect.NRND: Not recommended for new designs. Device is in production to support existing customers, but TI does not recommend using this part in a new design.PREVIEW: Device has been announced but is not in production. Samples may or may not be available.OBSOLETE: TI has discontinued the production of the device.(2) Eco Plan - The planned eco-friendly classification: Pb-Free (RoHS), Pb-Free (RoHS Exempt), or Green (RoHS & no Sb/Br) - please check /productcontent for the latest availability information and additional product content details.TBD: The Pb-Free/Green conversion plan has not been defined.Pb-Free (RoHS): TI's terms "Lead-Free" or "Pb-Free" mean semiconductor products that are compatible with the current RoHS requirements for all 6 substances, including the requirement that lead not exceed 0.1% by weight in homogeneous materials. Where designed to be soldered at high temperatures, TI Pb-Free products are suitable for use in specified lead-free processes.Pb-Free (RoHS Exempt): This component has a RoHS exemption for either 1) lead-based flip-chip solder bumps used between the die and package, or 2) lead-based die adhesive used between the die and leadframe. The component is otherwise considered Pb-Free (RoHS compatible) as defined above.Green (RoHS & no Sb/Br): TI defines "Green" to mean Pb-Free (RoHS compatible), and free of Bromine (Br) and Antimony (Sb) based flame retardants (Br or Sb do not exceed 0.1% by weight in homogeneous material)(3) MSL, Peak Temp. -- The Moisture Sensitivity Level rating according to the JEDEC industry standard classifications, and peak solder temperature.(4) There may be additional marking, which relates to the logo, the lot trace code information, or the environmental category on the device.(5) Multiple Device Markings will be inside parentheses. Only one Device Marking contained in parentheses and separated by a "~" will appear on a device. If a line is indented then it is a continuation of the previous line and the two combined represent the entire Device Marking for that device.Important Information and Disclaimer:The information provided on this page represents TI's knowledge and belief as of the date that it is provided. TI bases its knowledge and belief on information provided by third parties, and makes no representation or warranty as to the accuracy of such information. Efforts are underway to better integrate information from third parties. TI has taken andAddendum-Page 2continues to take reasonable steps to provide representative and accurate information but may not have conducted destructive testing or chemical analysis on incoming materials and chemicals. TI and TI suppliers consider certain information to be proprietary, and thus CAS numbers and other limited information may not be available for release.In no event shall TI's liability arising out of such information exceed the total purchase price of the TI part(s) at issue in this document sold by TI to Customer on an annual basis.Addendum-Page 3TAPE AND REEL INFORMATION*All dimensions are nominal Device Package Type Package DrawingPinsSPQ Reel Diameter (mm)Reel Width W1(mm)A0(mm)B0(mm)K0(mm)P1(mm)W (mm)Pin1Quadrant LM2903ITL/NOPB DSBGAYZR 8250178.08.4 1.7 1.70.76 4.08.0Q1LM2903ITLX/NOPB DSBGAYZR 83000178.08.4 1.7 1.70.76 4.08.0Q1LM2903MX SOICD 82500330.012.4 6.5 5.4 2.08.012.0Q1LM2903MX/NOPB SOICD 82500330.012.4 6.5 5.4 2.08.012.0Q1LM393MX SOICD 82500330.012.4 6.5 5.4 2.08.012.0Q1LM393MX/NOPB SOICD 82500330.012.4 6.5 5.4 2.08.012.0Q1LM393TL/NOPB DSBGAYZR 8250178.08.4 1.7 1.70.76 4.08.0Q1LM393TLX/NOPB DSBGA YZR 83000178.08.4 1.7 1.70.76 4.08.0Q1*All dimensions are nominalDevice Package Type Package Drawing Pins SPQ Length(mm)Width(mm)Height(mm) LM2903ITL/NOPB DSBGA YZR8250210.0185.035.0 LM2903ITLX/NOPB DSBGA YZR83000210.0185.035.0 LM2903MX SOIC D8*******.0367.035.0 LM2903MX/NOPB SOIC D8*******.0367.035.0 LM393MX SOIC D8*******.0367.035.0 LM393MX/NOPB SOIC D8*******.0367.035.0 LM393TL/NOPB DSBGA YZR8250210.0185.035.0LM393TLX/NOPB DSBGA YZR83000210.0185.035.0MECHANICAL DATA YZR0008xxxIMPORTANT NOTICETexas Instruments Incorporated and its subsidiaries(TI)reserve the right to make corrections,enhancements,improvements and other changes to its semiconductor products and services per JESD46,latest issue,and to discontinue any product or service per JESD48,latest issue.Buyers should obtain the latest relevant information before placing orders and should verify that such information is current and complete.All semiconductor products(also referred to herein as“components”)are sold subject to TI’s terms and conditions of sale supplied at the time of order acknowledgment.TI warrants performance of its components to the specifications applicable at the time of sale,in accordance with the warranty in TI’s terms and conditions of sale of semiconductor products.Testing and other quality control techniques are used to the extent TI deems necessary to support this warranty.Except where mandated by applicable law,testing of all parameters of each component is not necessarily performed.TI assumes no liability for applications assistance or the design of Buyers’products.Buyers are responsible for their products and applications using TI components.To minimize the risks associated with Buyers’products and applications,Buyers should provide adequate design and operating safeguards.TI does not warrant or represent that any license,either express or implied,is granted under any patent right,copyright,mask work right,or other intellectual property right relating to any combination,machine,or process in which TI components or services are rmation published by TI regarding third-party products or services does not constitute a license to use such products or services or a warranty or endorsement e of such information may require a license from a third party under the patents or other intellectual property of the third party,or a license from TI under the patents or other intellectual property of TI.Reproduction of significant portions of TI information in TI data books or data sheets is permissible only if reproduction is without alteration and is accompanied by all associated warranties,conditions,limitations,and notices.TI is not responsible or liable for such altered rmation of third parties may be subject to additional restrictions.Resale of TI components or services with statements different from or beyond the parameters stated by TI for that component or service voids all express and any implied warranties for the associated TI component or service and is an unfair and deceptive business practice. TI is not responsible or liable for any such statements.Buyer acknowledges and agrees that it is solely responsible for compliance with all legal,regulatory and safety-related requirements concerning its products,and any use of TI components in its applications,notwithstanding any applications-related information or support that may be provided by TI.Buyer represents and agrees that it has all the necessary expertise to create and implement safeguards which anticipate dangerous consequences of failures,monitor failures and their consequences,lessen the likelihood of failures that might cause harm and take appropriate remedial actions.Buyer will fully indemnify TI and its representatives against any damages arising out of the use of any TI components in safety-critical applications.In some cases,TI components may be promoted specifically to facilitate safety-related applications.With such components,TI’s goal is to help enable customers to design and create their own end-product solutions that meet applicable functional safety standards and requirements.Nonetheless,such components are subject to these terms.No TI components are authorized for use in FDA Class III(or similar life-critical medical equipment)unless authorized officers of the parties have executed a special agreement specifically governing such use.Only those TI components which TI has specifically designated as military grade or“enhanced plastic”are designed and intended for use in military/aerospace applications or environments.Buyer acknowledges and agrees that any military or aerospace use of TI components which have not been so designated is solely at the Buyer's risk,and that Buyer is solely responsible for compliance with all legal and regulatory requirements in connection with such use.TI has specifically designated certain components as meeting ISO/TS16949requirements,mainly for automotive use.In any case of use of non-designated products,TI will not be responsible for any failure to meet ISO/TS16949.Products ApplicationsAudio /audio Automotive and Transportation /automotiveAmplifiers Communications and Telecom /communicationsData Converters Computers and Peripherals /computersDLP®Products Consumer Electronics /consumer-appsDSP Energy and Lighting /energyClocks and Timers /clocks Industrial /industrialInterface Medical /medicalLogic Security /securityPower Mgmt Space,Avionics and Defense /space-avionics-defense Microcontrollers Video and Imaging /videoRFID OMAP Applications Processors /omap TI E2E Community Wireless Connectivity /wirelessconnectivityMailing Address:Texas Instruments,Post Office Box655303,Dallas,Texas75265Copyright©2013,Texas Instruments Incorporated。
lm2940中文资料_数据手册_参数

Note: 1.xx: Output Voltage, refer to Marking Information.
2.Pin Assignment: I: VIN G: GND O:VOUT
Package
SOT-223 TO-220 TO-252 TO-252 TO-263 TO-263 TO-263-3 TO-263-3
TIN VRIN
VTRRI
ROUT=100Ω, T ≤ 100ms ROUT=100Ω
ROUT=100Ω, T ≤ 100ms
For LM2940-6.0V
PARAMETER
SYMBOL
TEST CONDITIONS
Output Voltage Line Regulation Load Regulation Output Impedance Quiescent Current
VOUT △VOUT △VOUT ROUT
IQ
7.5V ≤ VIN ≤ 26V, 5mA ≤ IOUT ≤ 1A VOUT+2V ≤ VIN ≤ 26V, IOUT=5mA 50mA ≤ IOUT ≤ 1A 100 mA DC and 20mArms, fo=120Hz VOUT+2V ≤ VIN ≤ 26V, IOUT=5mA
3 of 11 QW-R102-016.J
LM2940
LINEAR INTEGRATED CIRCUIT
ELECTRICAL CHARACTERISTICS(Cont.)
For LM2940-8.0V
PARAMETER
SYMBOL
TEST CONDITIONS
Output Voltage Line regulation Load Regulation
德州仪器(Texas Instruments)混合信号产品用户指南(SLVU018)说明书

HighĆPerformance Synchronous Buck EVMUsing the TPS56100in Systems With Only5V AvailableUser’s GuideJuly 1999Mixed Signal ProductsSLVU018IMPORTANT NOTICETexas Instruments and its subsidiaries (TI) reserve the right to make changes to their products or to discontinue any product or service without notice, and advise customers to obtain the latest version of relevant information to verify, before placing orders, that information being relied on is current and complete. All products are sold subject to the terms and conditions of sale supplied at the time of order acknowledgement, including those pertaining to warranty, patent infringement, and limitation of liability.TI warrants performance of its semiconductor products to the specifications applicable at the time of sale in accordance with TI’s standard warranty. Testing and other quality control techniques are utilized to the extent TI deems necessary to support this warranty. Specific testing of all parameters of each device is not necessarily performed, except those mandated by government requirements.CERTAIN APPLICATIONS USING SEMICONDUCTOR PRODUCTS MAY INVOLVE POTENTIAL RISKS OF DEATH, PERSONAL INJURY, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE (“CRITICAL APPLICATIONS”). TI SEMICONDUCTOR PRODUCTS ARE NOT DESIGNED, AUTHORIZED, OR WARRANTED TO BE SUITABLE FOR USE IN LIFE-SUPPORT DEVICES OR SYSTEMS OR OTHER CRITICAL APPLICATIONS. INCLUSION OF TI PRODUCTS IN SUCH APPLICATIONS IS UNDERSTOOD TO BE FULLY AT THE CUSTOMER’S RISK.In order to minimize risks associated with the customer’s applications, adequate design and operating safeguards must be provided by the customer to minimize inherent or procedural hazards.TI assumes no liability for applications assistance or customer product design. TI does not warrant or represent that any license, either express or implied, is granted under any patent right, copyright, mask work right, or other intellectual property right of TI covering or relating to any combination, machine, or process in which such semiconductor products or services might be or are used. TI’s publication of information regarding any third party’s products or services does not constitute TI’s approval, warranty or endorsement thereof.Copyright © 1999, Texas Instruments IncorporatedRelated Documentation From Texas InstrumentsiiiRead This First PrefaceRead This FirstAbout This ManualThis user’s guide describes the TPS56100EVM 128 synchronous buck con-verter evaluation module (SLVP128). The SLVP128 provides a convenientmethod for evaluating the performance of a synchronous buck converter usingthe TPS56100 ripple regulator controller. A complete designed and testedpower supply is presented. The power supply is a programmable step-downdc-dc EVM that can deliver up to 6 A of continuous output current at a program-mable output voltage from 1.3 V approximately 4.4 V determined by a 5 bitDAC code and the use of three external components with an input voltage of5 V.How to Use This ManualThis document contains the following chapters:-Chapter 1 Introduction provides introductory and background information.-Chapter 2 Test Results shows the test setups used, and the test resultsobtained, in designing the SLVP128 EVM.-Chapter 3 Schematic contains the schematic diagram for the SLVP128EVM.-Chapter 4 Physical Layouts contains the board layout, and assemblydrawings for the SLVP128 EVM.-Chapter 5 Bill of Materials contains the bill of materials required for theSLVP128 EVM.Related Documentation From Texas Instruments-Designing Fast Response Synchronous Buck Converters Using theTPS5210 Application Report, Literature Number SLVA044.-TPS5210 Programmable Synchronous-buck Regulator Controller DataSheet, Literature Number SLVS171.-VRM 8.3 DC-DC Converter Design Guidelines, Intel document order num-ber: 243870-001, June 1998.-High-Density Synchronous Buck Converter Design Using TPS56xx Con-trollers User’s Guide, Literature Number SLVU013Information About Cautions and WarningsInformation About Cautions and WarningsThis book may contain cautions and warnings.This is an example of a caution statement.A caution statement describes a situation that could potentiallydamage your software or equipment.This is an example of a warning statement.A warning statement describes a situation that could potentiallycause harm to you.The information in a caution or a warning is provided for your protection.Please read each caution and warning carefully.FCC WarningThis equipment is intended for use in a laboratory test environment only. It gen-erates, uses, and can radiate radio frequency energy and has not been testedfor compliance with the limits of computing devices pursuant to subpart J ofpart 15 of FCC rules, which are designed to provide reasonable protectionagainst radio frequency interference. Operation of this equipment in other en-vironments may cause interference with radio communications, in which casethe user at his own expense will be required to take whatever measures maybe required to correct this interference.ivRunning Title—Attribute ReferencevChapter Title—Attribute Reference Contents1Introduction 1-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1.1Background 1-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1.2Performance Specification Summary 1-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1.3Voltage Programming Code 1-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2Test Results 2-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2.1Test Summary 2-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2.1.1Static Line and Load Regulation 2-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2.1.2Output Voltage Ripple 2-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2.1.3Efficiency and Power Losses 2-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2.1.4Output Start-Up and Overshoot 2-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2.1.5Frequency Variation 2-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2.1.6Conclusion 2-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2.2Test Setup 2-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2.3Test Results 2-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3Schematic 3-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.1Schematic 3-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4Physical Layouts 4-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.1Board Layout 4-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5Bill of Materials 5-1. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5.1Bill of Materials 5-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Running Title—Attribute ReferenceviFigures2–1SLVP128 Test Setup 2-5. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2–2SLVP128 Measured Load and Line Regulation 2-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2–3SLVP128 Measured Efficiency 2-6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2–4SLVP128 Measured Power Dissipation 2-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2–5SLVP128 Measured Switching Frequency 2-7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2–6SLVP128 Measured Switching Waveforms 2-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2–7SLVP128 Measured Start-Up Waveforms 2-8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3–1SLVP128 Schematic Diagram 3-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4–1SLVP128 Board Layout Top Layer 4-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4–2SLVP128 Board Layout Bottom Layer 4-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4–3SLVP128 Top Assembly View 4-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4–4SLVP128 Side View of Assembly 4-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4–5SLVP128 Pin Setup Detail View 4-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Running Title—Attribute ReferenceviiContents Tables1–1Performance Specification Summary 1-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1–2Voltage Programming Code 1-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2–1Evaluation Board Efficiency and Power Losses 2-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2–2Evaluation Board Frequency Variation 2-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5–1SLVP128 Bill of Materials 5-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Chapter 1IntroductionTopic Page 1.1Background1-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . .1.2Performance Specification Summary1-3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .1.3Voltage Programming Code1-4Introduction1-1Background1.1BackgroundNew high performance microprocessors may require from 40 to 80 watts ofpower for the CPU alone. Load current must be supplied with up to 30 A/µsslew rate while keeping the output voltage within tight regulation and responsetime tolerances [3]. Parasitic interconnect impedances between the powersupply and the processor must be kept to a minimum. Fast responding syn-chronous buck dc/dc converters controlled by the Texas InstrumentsTPS56100 hysteretic controller are ideally suited for microprocessor powerapplications requiring fast response and precise regulation of rapidly changingloads.Conventional synchronous regulator control techniques include fixedfrequency voltage-mode, fixed frequency current-mode, variable frequencycurrent-mode, variable on-time, or variable off-time. CPU power supplies thatare designed using these types of control methods require additional bulkstorage capacitors on the output to maintain V O within the regulation limitsduring the high di/dt load transients because of the limited bandwidth of thecontroller. Some controllers add a fast loop around the slower main controlloop to improve the response time, but V O must deviate outside a fixedtolerance band before the fast loop becomes active. The hysteretic controlmethod employed by the TPS56100 offers superior performance with norequirements for additional output capacitance or difficult loop compensationdesign.The TPS56100 controller was optimized for tight Vout regulation under staticand dynamic load conditions, for improved system efficiency, and can operatein systems that derive main power from 5 V.1-2Performance Specification Summary1-3Introduction 1.2Performance Specification SummaryThis section summarizes the performance specifications of the SLVP128 converter. Table 1–1 gives the performance specifications of the converters.Table 1–1.Performance Specification SummarySpecification TestConditionsMin Typ Max Units Input voltage range 4.55 5.5V Output voltage range See Note 1 1.3 2.0 4.4V Static voltage tolerance See Note 2 1.982.0 2.02VLine regulation See Notes 1, 3± 0.05%± 0.1%Load regulation See Notes 4, 5± 0.1%± 0.4%Transient response See Note 6± 5550mV pk µs Output current range See Note 306A Current limit See Note 38A Output ripple See Note 335mV Soft-start rise time See Note 410ms Operating frequency See Notes 1,4235kHzEfficiency, 6 A load See Notes 2, 484%Efficiency, 3 A loadSee Notes 2, 483%Notes:1)I O = 6 A.2)VID inputs set for V REF = 2 V.3)Input voltage can be at any point over entire range.4)Input voltage adjusted to 5 VDC.5)I O varied can be at any point over entire range.6)I O pulsed from 0 A to 6 A, di/dt = 30 A/µs.Voltage Programming Code1.3Voltage Programming CodeA voltage programming network (VP) consisting of a 5–bit DAC pro-grams the regulated voltage within a range from 1.3 V to 2.6 V. The out-put voltage for a given VP Code is shown in Table 1–2.Table 1–2.Voltage Programming CodeVP Terminals(0 = GND, 1 = floating or pull-up to 5 V)VREFVP4VP3VP2VP1VP0(Vdc)01111 1.3001110 1.3501101 1.4001100 1.4501011 1.5001010 1.5501001 1.6001000 1.6500111 1.7000110 1.7500101 1.8000100 1.8500011 1.9000010 1.9500001 2.0000000 2.0511111No CPU11110 2.1011101 2.2011100 2.3011011 2.4011010 2.5011001 2.6011000 2.6010111 2.6010110 2.6010101 2.6010100 2.6010011 2.601-4Voltage Programming Code1-5Introduction Table 1–2.Voltage Programming Code (Continued)VP Terminals(0 = GND, 1 = floating or pull-up to 5 V)VREFVP4VP3VP2VP1VP0(Vdc)10010 2.6010001 2.6012.60Note:If the VP bits are set to 11111, then the high-side and low-side driver outputs will be set low.Chapter 2Test Results This chapter shows the test setups used, and the test results obtained, in de-signing the SLVP128 EVM.Topic Page 2.1Test Summary2-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2.2Test Setup2-4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2.3Test Results2-6Test Results2-1Test Summary2.1Test SummaryThe detailed test results and waveforms are presented in Figure 2–2 toFigure 2–7 for the SLVP128. The following are summarized results.2.1.1Static Line and Load RegulationThe precise reference voltage regulator implemented in the TPS56100controller using both positive and negative remote sense pins providesexcellent regulation characteristics. The load regulation from no load to 6amps load current does not exceed 0.32%. The line regulation is less than0.31% for the input voltage range from 4.5 V to 5.5 V. Line and load regulationis shown in Figure 2–2. The set point tolerance is approximately 1.0%.2.1.2Output Voltage RippleThe output voltage peak-to-peak ripple is less than ±1%. This is a typical valuebut it can be optimized for lower ripple applications. Measured output ripplewaveform is shown in Figure 2–6. The output filter for this EVM design isoptimized for fast transient response due to the high slew-rate load currenttransitions. Therefore, the output filter is not optimized for low ripple and hasa moderate amount of output ripple.2.1.3Efficiency and Power LossesEfficiency and power losses for 5 V input voltage and maximum output currentof 6 A are presented in the following table:Table 2–1.Evaluation Board Efficiency and Power LossesEvaluation Board Efficiency, %Power Losses, WSLVP128 (1.8V)84 2.02An efficiency graph versus load at different line voltages is shown inFigure 2–3. Low power loss in each component decreases their temperaturerise and improves long term reliability. The EVM does not require forced aircooling over a temperature range of 0°C to 70°C.2.1.4Output Start-Up and OvershootOutput voltage rise time does not depend on the load current and ramps upin a linear fashion There is no discernable overshoot in the waveform. In thisapplication, output voltage rise time is set to approximately 10 mS with an ex-ternal capacitor (C7).2.1.5Frequency VariationThe switching frequency for a hysteretic controller depends on the input andoutput voltages and the output filter characteristics. It has approximately thesame frequency variation as constant OFF time controllers. The precise 2-2Test Summary2-3Test Results equation for switching frequency, confirmed by experiment, is presented in the TPS56100 datasheet. A more detailed analysis of the switching frequency variation for a hysteretic converter can be found in TI’s application report Designing Fast Response Synchronous Buck Converters Using the TPS5210,Literature Number SLVA044 and in the paper presented at HFPC-98: A Fast,Efficient Synchronous-Buck Controller for Microprocessor Power Supplies .This paper can also be downloaded from the URL:/sc/docs/msp/papers/index.htm.The frequency variation over all input voltage and output current combinations is presented in the following table.Table 2–2.Evaluation Board Frequency VariationEvaluation Board Frequency Variation, kHz SLVP128 (1.8V)215–250A graph of switching frequency versus load at different line voltages is shown in Figure 2–5.2.1.6ConclusionThe test results of the SLVP128 EVM demonstrate the advantages of the TPS56100 controller to meet stringent supply requirements to power supplies,especially for powering DSPs and microprocessors. The power system designer has a good solution to optimize the system for his particular application. Detailed information on how to design a dc-dc converter by using the TPS56100 hysteretic controller is presented the TPS56100 datasheet.Other sources of information on designing hysteretic controlled power supplies can be found in TI’s User’s Guide High-Density Synchronous Buck Converter Desing Using TPS56xx Controllers , Literature Number SLVU013 or the application report Designing Fast Response Synchronous Buck Regulators Using the TPS5210, Literature Number SLVA044.Test Setup2.2Test SetupFollow these steps for initial power up of the SLVP128:1)Connect an electronic load from Vout to PwrGND (J9 and J10 to J11, J12,and J13) adjusted to draw approximately 1 A at 1.8 V. The exact currentis not critical; any nominal current is sufficient. A fixed resistor can also beused in place of the electronic load. The output current drawn by theresistor is I L = 1.8 V/R, where R is the value of the load resistor. Theresistor power rating, P R should be at least 2 × 1.82/R Watts.Connect the sense lines from the load to VsenseH and VsenseL (J1 andJ2).2)Connect a 5-V lab power supply to the 5–V input (J4, J5 and J6 referencedto PwrGND, J7 and J8) of the SLVP128. Adjust the current limit toapproximately 1 A.3)Turn on the 5-V power supply and ramp the input voltage up to 5 V.4)Verify that the SLVP128 output voltage (measured at the module outputpins) is 1.8 V ±0.020 V.5)For subsequent testing, ensure the lab supply output current capacity andcurrent limit are at least 5 A so that the SLVP128 can be operated at maxi-mum load of 6 A.6)Refer to the Test Results for selected typical waveforms and operatingconditions for verification of proper module operation.Figure 2–1 shows the SLVP128 test setup.2-4Test Setup2-5Test Results Figure 2–1.SLVP128 Test SetupLoad +–Power Supply5–V, 7–A SupplyNote: All wire pairs should be twisted.N/C0 – 10 AVSENSE+VSENSE–INHTest Results2-62.3Test ResultsFigures 2–2 to 2–7 show test results for the SLVP128.Figure 2–2.SLVP128 Measured Load and Line Regulation1.821.8251.831.8351.840123456V I = 5.5 VV I = 5 VV I = 4.5 VV o u t , VIout, AFigure 2–3.SLVP128 Measured Efficiency0.020.040.060.080.0100.0Iout, A123456E f f i c i e n c y , %V I = 5.5 VV I = 5 VV I = 4.5 VTest Results2-7Test Results Figure 2–4.SLVP128 Measured Power Dissipation0.000.501.001.502.002.503.00Iout, A0123456P l o s s , WV I = 5.5 VV I = 5 VV I = 4.5 VFigure 2–5.SLVP128 Measured Switching Frequency50100150200250300350Iout, A123456V I = 5.5 VV I = 5 VV I = 4.5 VF r e q u e n c y , k H zV O20 mV/divV DS Q22 V/div1 µsec/div SLVP128 Measured Start-Up WaveformsV O1 V/divV I2.5 V/div1 ms/divChapter 3Schematic This chapter contains the schematic diagram for the SLVP128 EVM.Topic Page 3.1Schematic3-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Schematic3-1Schematic3-3Schematic Figure 3–1.SLVP128 Schematic DiagramSLOWST ANAGND VSENSE VREFB VHYST OCP IOUTPWRGDINHIBIT IOUTLO NC VID0VID1VID2VID3VID4BIAS LODRV LOHIB DRVGND LOWDR DRV LOSENSE HISENSE BOOTLO HIGHDR BOOT VCC J 1J 2J 3J 4J 5J 6J 7J 8J 9J 10J 11J 12J 13J 14Chapter 4Physical Layouts This chapter contains the board layout, and assembly drawings for the SLVP128 EVM.Topic Page 4.1Board Layout4-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Physical Layouts4-1Board Layout4.1Board LayoutThe power supply module consists of one PWB. Figure 4–1 shows the top lay-er (front view) of the SLVP128 PWB. Figure 4–2 shows the bottom layer (topview) of the SLVP128 PWB.Figure 4–3 shows the SLVP128 top assembly view. Figure 4–4 shows a sideview of the SLVP128 assembly. Figure 4–5 shows the pin setup detail for theSLVP128.Figure 4–1.SLVP128 Board Layout Top LayerTop Layer4-2Board Layout4-3Physical Layouts Figure 4–2.SLVP128 Board Layout Bottom LayerBottom Layer (Top View)Figure 4–3.SLVP128 Top Assembly ViewTop AssemblyFrontBackBoard Layout4-4Figure 4–4.SLVP128 Side View of AssemblyC20L1C16L2FrontBackSide View of AssemblyFigure 4–5.SLVP128 Pin Setup Detail ViewFrontDetail of Pin SetupChapter 5Bill of Materials This chapter contains the bill of materials required for the SLVP128 EVM.Topic Page 5.1Bill of Materials5-2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .Bill of Materials5.1Bill of MaterialsEVM. Table 5–1 lists materials required for the SLVP128 EVM. Table 5–1.SLVP128 Bill of MaterialsQty Part Number Description MFG Size RefDesC1110TPA33M Capacitor, POSCAP, 33 uF, 10 V, 20%Sanyo CC21GRM39X7R103K025A Capacitor, Ceramic, 0.01uF, 25V, 10%,muRata603X7RmuRata603 C35GRM39X7R104K016A Capacitor, Ceramic, 0.1 uF, 16V, 10%,X7RC4Not Used603muRata603 C51GRM39X7R102K050A Capacitor, Ceramic, 1000 pF, 50V, 10%,X7RmuRata603 C6GRM39X7R104K016A Capacitor, Ceramic, 0.1 uF, 16V, 10%,X7RmuRata603 C7GRM39X7R104K016A Capacitor, Ceramic, 0.1 uF, 16V, 10%,X7RPanasonic805 C84ECJ-2VF1C105Z Capacitor, Ceramic, 1.0 uF, 16V,+80%-20%, Y5VmuRata603 C9GRM39X7R104K016A Capacitor, Ceramic, 0.1 uF, 16V, 10%,X7RmuRata805 C10ECJ-2VF1C105Z Capacitor, Ceramic, 1.0 uF, 16V,+80%-20%, Y5VPanasonic805 C11ECJ-2VF1C105Z Capacitor, Ceramic, 1.0 uF, 16V,+80%-20%, Y5VPanasonic805 C12ECJ-2VF1C105Z Capacitor, Ceramic, 1.0 uF, 16V,+80%-20%, Y5VC13GRM39X7R104K016A Capacitor, Ceramic, 0.1 uF, 16V, 10%,Panasonic603X7RC1436TPB150M Capacitor, POSCAP, 150 uF, 6.3 V, 20%Sanyo DC156TPB150M Capacitor, POSCAP, 150 uF, 6.3 V, 20%Sanyo DC166TPB150M Capacitor, POSCAP, 150 uF, 6.3 V, 20%Sanyo DC171GRM42-6Y5V225Z016A Capacitor, Ceramic, 2.2 uF, 16V, Y5V muRata1206muRata1206 C181GRM42-6X7R103K025A Capacitor, Ceramic, 0.01uF, 25V, 10%,X7RC1934TPC150M Capacitor, POSCAP, 150 uF, 4 V, 20%Sanyo D2 C204TPC150M Capacitor, POSCAP, 150 uF, 4 V, 20%Sanyo D2 C214TPC150M Capacitor, POSCAP, 150 uF, 4 V, 20%Sanyo D2 C221GRM235Y5V106Z016A Capacitor, Ceramic, 10uF, 16V, Y5V muRata1210Bill of Materials Table 5–1.SLVP128 Bill of Materials (Continued)RefDesQty Part Number Description MFG SizeD11SML-LX2832GC-TR Diode. LED, Green, 2.1 V, SM Lumex1210J1–J1414CA21BA-D36K-0FA Clip, surface-mount, 0.040” board,0.090” stand-offNASInterplex0.1 CtrsJP1Not used603JP24Std Resistor, chip, 0 Ω, 1/16W603JP3Not used603JP4Std Resistor, chip, 0 Ω, 1/16W603JP5Std Resistor, chip, 0 Ω, 1/16W603JP6Std Resistor, chip, 0 Ω, 1/16W603L11DO3316P-222HC Inductor, 2.2 uH, 7.4 A Coilcraft DO3316P L21DO3316P-152HC Inductor, 1.5 uH, 9.0 A Coilcraft DO3316P Q112N7002DICT-ND MOSFET, N-ch, 60 V, 115 mA, 1.2 ΩDiodes, Inc.TO-236 Q22IRF7811FET, N-ch, 30-V, 10-A, 11 mΩI.R.SO-8Q3IRF7811FET, N-ch, 30-V, 10-A, 11 mΩI.R.SO-8R11Std Resistor, chip, 2 kΩ, 1/16W, 5%603R21Std Resistor, chip, 1 kΩ, 1/16W, 1%603R31Std Resistor, chip, 750 Ω, 1/16W, 5%603R42Std Resistor, chip, 100 Ω, 1/16W, 1%603R52Std Resistor, chip, 20 kΩ, 1/16W, 1%603R62Std Resistor, chip, 10 kΩ, 1/16W, 5%603R7Std Resistor, chip, 20 kΩ, 1/16W, 1%603R8Std Resistor, chip, 10 kΩ, 1/16W, 5%603R9Std Resistor, chip, 100 Ω, 1/16W, 1%603R102Std Resistor, chip, 10 Ω, 1/10W, 5%805R11Std Resistor, chip, 10 Ω, 1/10W, 5%805R122Std Resistor, chip, 4.7 Ω, 1/16W, 5%603R131Std Resistor, chip, 2.7 Ω, 1/4W, 5%1210R14Std Resistor, chip, 4.7 Ω, 1/16W, 5%603R151Std Resistor, chip, 10 Ω, 1/16W, 5%603U11TPS56100PWP IC, PWM ripple controller, programmable TI PWP-28 1SLVP128, Rev. A PCB, 2-Layer, 2-oz,1.75”(L) × 1.18”(W) × 0.040”(T)。
2948资料

A l l t h e b e n e f i t s o f t h e2945A b u t w i t h af oLow phase noise signal generatorHigh stability reference oscillator(OCXO)Accurate power measurement to 150 W Transient and harmonic analysisFast response high resolution bar charts peaking and nullingTracking generator with full offset track-Full span spectrum analyzer with ‘live’and listen Field OperationAt under 12kg the 2948 lightens the load to remote sites. The shape of the 2948 is ideal for carrying; the side handle ensures that the instrument is clear of the stairs when ascending buildings and the 2948’s depth is suitable for the instrument to be operated comfort-ably when it is placed on the floor.An optional bail arm handle is also available. This option allows a stowage cover to be fitted over the front panel for storage of adapters and further protection to the instrument’s front panel. Full opera-tion is possible from the protective ‘ever-ready’ case so that your investment is protected from transit damage.Stored settings may be recalled from internal memory or from a The spectrum analyzer provides spans from 100Hz per division to MHz per division and also has a fully adjustable reference level. Speed is comparable with analog analyzers, allowing real time adjust-SimulationThe 2948 simulates the signalling protocol that the radio would seeCard -with real time clockThe memory card drive meets the PCMCIA standard format for PC cards. The 2948 provides a DOS based filing system that allows trans-AnalysisThe ability to capture transients on the rising or falling edge of aOUTPUT LEVELOutput Level RangeN I C A N D T R A N S I E N T A N A L Y S I S。
02_AN2945 STM8S and STM32 MCUs a consistent 832-bit product line for painless migration

AN2945Application note STM8S and STM32™ MCUs: a consistent 8/32-bit product linefor painless migrationIntroductionFollowing the market launch of the award winning STM32™ microcontroller,STMicroelectronics completes the renewal of its microcontroller product line with theannouncement of the STM8S family. Significant effort has been made to rationalize theMCU portfolio, in particular by capitalizing on common peripherals and software tools withthe aim to easing product migration.The cost, in terms of both time and money, of maintaining a development team to design ina new MCU family is a major criterion when selecting a microcontroller supplier. It istherefore an advantage to make this kind of non-recurring investment if it applies to a broadrange of MCUs. With an MCU product line ranging from 20 to 144 pins, and memory sizesfrom 2 to 512 Kbytes, the 8-bit STM8S and 32-bit STM32 families bring a lot of flexibilitywhen building a product portfolio. Should an 8-bit application run out of MIPS, there is anupgrade path to the STM32 family. Conversely, if you wish to cut costs on a 32-bit platform,it is relatively simple to switch to the STM8 family.This document presents the similarities and common features of the STM8S and STM32product lines, with a view of helping migration from one family to the other.July 2009Doc ID 15468 Rev 11/18Contents AN2945Contents1Core . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 2Peripherals . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63System features . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.1Reset . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.2Clock . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113.3Memory . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113.4Safety . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 123.5Low power . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13 4Software library . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14 5Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16 6Revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172/18 Doc ID 15468AN2945List of tables List of tablesTable 1.STM8 and STM32: core comparison . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 Table 2.STM32 SPI register map and reset values. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 Table 3.STM8 SPI register map and reset values. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 Table 4.Peripherals shared between STM8 and STM32 devices . . . . . . . . . . . . . . . . . . . . . . . . . . . 9 Table 5.STM8S/STM32 clock source characteristics (indicative data) . . . . . . . . . . . . . . . . . . . . . . 11 Table 6.Document revision history . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17Doc ID 154683/18List of figures AN2945 List of figuresFigure 1.Digital peripheral’s internal structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6 Figure 2.SPI block diagrams. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 Figure 3.STM8S and STM32 reset circuitries. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10 Figure 4.STM8S code example . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 Figure 5.STM32 code example. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 4/18 Doc ID 15468AN2945CoreDoc ID 154685/181 CoreThe STM8™ CPU is a proprietary architecture that maintains the legacy of the previous ST7 core while being a breakthrough in terms of 8-bit CPU efficiency and code density. The STM32 is built around the industry standard ARM ® Cortex™-M3 32-bit core and benefits from the complete ecosystem of development tools and software solutions associated with ARM processors. Although they may be perceived as radically different, these two processors indeed share many architectural similarities summarized in Table 1.Both are based on the Harvard architecture. They have 3-stage pipelined execution thatminimizes the execution time, a clock speed up to 24MHz for the STM8S and up to 72MHz for the STM32 family.They are devised to be highly energy efficient, with several low power modes, and they benefit from memory interfaces wider than the average instruction length (32- and 64-bit wide busses, respectively). This minimizes the number of accesses to the memory bus and thus the consumption related to address bus toggling and non-volatile memory read accesses. Interrupt tail chaining and the Halt/Sleep on exit modes also help avoiding unnecessary stack accesses.Finally, in terms of code density, both have excellent results, owing to the 8-bit CISC instruction set for the STM8S family and, to the 16-bit Thumb-2 mode introduced by the Cortex core for the STM32 family.This short comparison demonstrates that both processors are state-of-the-art in terms of micro-architectural features. The STM8 is at the level of legacy of 16-bit processors, and the Cortex-M3 meets the requirements of applications currently using 32-bit down to mid/high-end 16-bit MCUs. The combination of the STM8 and STM32 therefore establishes aperformance continuum, which is now also supported at tool levels by a third party offering a unified development platform for both product lines.Table 1.STM8 and STM32: core comparisonSTM8Cortex-M3Data path8-bit 32-bit Drhystone MIPS (0WS)0.29 DMIPS 1.22 DMIPS Architecture Harvard Harvard Pipeline Y es, three-stage Y es, three-stage Instruction setCISC RISC Program bus data width 32-bit32-bitPrefetch bufferY es, 2 × 32-bit, internal Y es, 2 × 64-bit, in memory interface Average instruction size 2 bytes2 bytesInterrupt type LatencyVectorized9 cycles, tail chaining supportedVectorized12 cycles, tail chaining supportedLow power modes Slow, Wait for Event or interrupts, Halt, Halt on exit Slow, Sleep (Wait for event or interrupt), Sleep on exit, Deep sleep Debug interface1-wire (SWIM)2-wires or legacy JTAGPeripherals AN2945 2 PeripheralsThe MCU peripherals (also called IPs) are another example of the ST MCU consistencyacross the 8- and 32-bit product lines: most of the basic IPs have been defined andstructured to be portable from one product family to the other. This was done by adaptingsimple, yet effective, 8-bit peripherals to the 32-bit world. It brings the benefits of cost- andpower-effective, easy to understand resources, which are complemented at system level bywider busses and a DMA controller when higher performance is needed. Once the workingprinciple of a peripheral is understood, it is applicable to both the STM8S and STM32families, thus speeding up transition between devices.Figure1 shows a simplified representation of a digital peripheral.The peripheral can be partitioned into two main blocks. First, a kernel that contains the statemachines, counters and any kind of combinatorial or sequential logic necessary to performtasks that do not need the processor, such as low-communication layers, analog front-endmanagement or timing-driven functions. If necessary, the kernel is connected to the externalworld via MCU ports. The external connection may consist of a few I/Os or complex busses.Second, the peripheral is initialized and controlled by the application through registersconnected to an internal bus shared with the other MCU resources. In 8-bit microcontrollers,the processor directly writes to and reads from registers, whereas in 32-bit products, registerread and write operations usually go through a bridge. The main difference between the twofamilies, however, lies in the internal bus specification the peripheral has to comply with.This explains why STM8S and STM32 devices are able to share peripherals: these arebased on the same kernel, and are only tailored to the two different bus interfaces. ARMprocessors and peripherals comply with the AMBA bus specification, with a 32-bit databus, 6/18 Doc ID 15468AN2945PeripheralsDoc ID 154687/18whereas STM8S devices use a simpler, yet efficient, 8-bit bus standard. From the functional point of view, they only differs by:●the register size: 8 vs. 16 or 32-bit●the maximum clock frequency that directly depends on the CPU operating speed ●the DMA that offloads the CPU from simple data management and increases the maximum data throughput●few product-specific functions, such as I/O port managementLet us consider the STM8S and STM32 SPI block diagrams shown in Figure 2. At firstglance, they look identical apart from a few differences in bits highlighted in red in Figure 2, for instance, at the level of the DMA.Now considering the register maps shown in Table 2 and Table 3, they are clearly based on the same design: apart from a few differentiating bits and the register sizes, registers and bits have similar names and locations in registers.Peripherals AN29458/18 Doc ID 15468Table 2.STM32 SPI register map and reset valuesOffsetRegister3130292827262524232221201918171615141312111098765432100x00SPI_CR1ReservedB I D I M O D EB I D I O EC R C E N C R C N E X TD F FR X O N L YS S MS S IL S B F I R S TS P EBR [2:0]M S T R C P O LC P H A Reset Value 00000000000000000x04SPI_CR2ReservedT X E I ER X N E I EE R R I ER e s e r v e d S S O ET X D M A E N R X D M A E N Reset Value 0000000x08SPI_SR ReservedB S YO V RM O D FC R C E R RU D RC H S ID ET X E R X N E Reset Value 000000100x0C SPI_DR Reserved DR[15:0]Reset Value 00000000000000000x10SPI_CRCPR Reserved CRCPOL Y[15:0]Reset Value 00000000000001110x14SPI_RXCRCR Reserved RxCRC[15:0]Reset Value 00000000000000000x18SPI_TXCRCR ReservedTxCRC[15:0]Reset Value 0000000000000x1C SPI_I2SCFGR ReservedI 2S M O DI 2S EI 2S C F GP C M S Y N C R e s e r v e dI 2S S T D C K P O LD A T LE N C H L E N Reset Value00000000000x20SPI_I2SPR ReservedM C K O EO D DI2SDIVReset Value001Table 3.STM8 SPI register map and reset valuesAddress offsetRegister name76543210x00SPI_CR1Reset value LSBFirst0SPE 0BR20BR10BR10MSTR 0CPOL 0CPHA 00x01SPI_CR2Reset value BDM 0BDOE 0CRCEN0CRCNEXT0Reserved0RXONL Y0SSM 0SSI 00x02SPI_ICR Reset value TXIE 0RXIE 0ERRIE 0WKIE 0Reserved0Reserved0Reserved0Reserved00x03SPI_SR Reset value BSY 0OVR 0MODF 0CRCERRWKUP 0ReservedTXE 1RXNE 00x04SPI_DR Reset value MSB 0-0-0-0-0-0-0LSB 00x05SPI_CRCPR Reset value MSB 0-0-0-0-0-1-1LSB 10x06SPI_RXCRCR Reset value MSB 0-0-0-0-0-0-0LSB 00x07SPI_TXCRCR Reset valueMSB 0-0-0-0-0-0-0LSB 0AN2945Peripherals Table4 lists the common peripherals, highlighting the coherency between products atregister, bit and feature level.Table 4.Peripherals shared between STM8 and STM32 devicesPeripheral namesSTM32STM8Independent watchdog (IWDG)Window watchdog (WWDG)Serial peripheral interface (SPI)Inter-integrated circuit (I2C) interfaceUniversal synchronous/asynchronous receiver/transmitter (USART)Advanced-control timers16-bit advanced-control timerGeneral-purpose timer16-bit general-purpose timersBasic timer8-bit basic timerAlthough the timers seem different with many distinct configurations, their architectureacross and within the product families is the same. There are only variations of a singletimer architecture. From the superset, sub-blocks can optionally be stripped to decrease thenumber of capture/compare channels or remove options necessary only for a few specificapplications such as motor control.Doc ID 154689/18System features AN294510/18 Doc ID 154683 System featuresToday’s MCUs are complex SoCs (systems on chip) that not only include a lot of peripherals,but also advanced-system features aiming at reducing the bill of material or enhancing the products’ safety and robustness. This is true for both 8- and 32-bit platforms.3.1 ResetAs shown in Figure 3, the STM8S and STM32 devices have the same reset circuitry, with only slight differences.The NRST pin is both an input and an open-drain output with a built-in pull-up resistor. For EMS (electromagnetic sensitivity) robustness purposes, a filter is inserted to avoid glitch propagation into the digital circuitry. There are three advantages with having a bidirectional reset:●for multi-MCU systems, bidirectional reset ensures than all subprocessors are correctly synchronized at startup or in case of a warm reset●the voltage supervisors (power-on reset and brownout reset) embedded in the MCU can also be used at system level for other ICs●it is of a great help during debugging when spurious internal resets are generatedAN2945System featuresDoc ID 1546811/183.2 ClockFrom the clock system standpoint, the two products have three main clock sources incommon, that share similar electrical characteristics. See T able 5 for details.The oscillator handles both the crystal and resonators, and is called the HSE (for high-speed external). It can also be bypassed to feed the MCU with an external clock. This isused for applications that have stringent requirements in terms of accuracy and stability, forcommunication purposes for instance.An application can run at a high frequency without an external crystal by using the HSI clock(for high-speed internal). This source has a consumption 10 times lower than the HSE and avery low percentage of accuracy error. It can also be used as a PLL input on the STM32 toincrease the internal frequency to up to 64 MHz.Finally, the low-speed internal clock (LSI) is an ultralow internal power source (a few µA),that can be permanently enabled to clock an auto-wakeup peripheral during the Halt or Stopmode. It can also clock a secondary on-board watchdog (refer to Section 3.4: Safety forfurther details), and be used as the CPU clock on the STM8 products. It is not accurate(error of a few tens of percents), but it can be measured periodically using the precise HSIclock to compensate for chip manufacturing variations or the drift due to temperature forinstance.3.3 MemoryBoth product lines are based on non-volatile memories and have an option byte loader. Thismechanism replaces the legacy fuses for MCU power-up configuration: the user can selectseveral options at programming time, which are written alongside the program binary image.Several features are available on all news microcontrollers:●Reset in Halt, Stop or Standby mode: this is to avoid a deadlock situation in case the MCU enters a low power mode by accident, for applications not designed to handlesuch a configuration●Hardware/Software watchdog, to have the possibility of starting the watchdog by hardware, right after the reset sequence●Memory readout protection, to prevent any piracy on the program content●Memory write protection, to protect part of the memory, if it contains a critical code. Usually, this applies to the boot code or an IAP (in application programming) driver Table 5.STM8S/STM32 clock source characteristics (indicative data (1))1.Refer to product datasheet for detailed electrical characteristics.System clock source FrequencyAccuracy errorConsumption STM8S STM32High-speed external (HSE)1-24 MHz 4-16 MHzCrystal dependent, down to a few tens of ppm 1 to 2 mA High-speed internal (HSI)16 MHz 8 MHz1% typical 100 to 250 µA Low-speed internal 110-146 kHz30-60kHz 20 to 50% 1 to 5 µASystem features AN2945 These options allow automatically enabled safety and robustness features, so that theapplication can recover even if a disturbance or an attack occurs before the very firstinstruction is fetched by the CPU.The STM8S and STM32 devices have an embedded boot loader, making it possiblereprogram the internal Flash memory with an on-board serial interface (the UART forinstance). Any PC with a serial COM interface can then be used as a programming tool toprogram or update the Flash and data EEPROM memory content. ST provides a softwareutility to perform all operations supported by the boot loader.3.4 SafetyThe automotive industry first pushed for increasing the reliability of MCU-based electroniccontrols. This has been followed by similar requests from the industrial segments, andhousehold appliances now have to comply with a specific standard, IEC60335-1. Both theSTM32 and STM8S devices are Class B compliant according to this standard. Complianceis obtained by using dedicated self-test libraries certified by an independent test institute,and also with the help of some specific hardware circuitry. Both the software and hardwarecontribute to significantly reduce the development and qualification time of applications withstringent functional safety requirements.●WatchdogsThe MCUs embed two watchdogs:–The Window Watchdog is intended to monitor the main loop and check that loop time is within a given time frame. It runs on the system clock.–In parallel, an independent watchdog can be activated to increase the system’s robustness This watchdog will indeed continue to operate even in the case of amain clock failure (for instance due to a broken crystal).●Clock monitoringThe standard also requires the detection of crystal failure or oscillations at harmonics/subharmonics. This is achieved using the clock system described in Section3.2: Clock,to periodically measure the external crystal or resonator frequency with the internalclock source. Finally, a clock security system (CSS) also monitors the HSE source andautomatically switches back the system clock to the internal HSI clock in case of afailure.12/18 Doc ID 15468AN2945System featuresDoc ID 1546813/183.5 L ow powerOn top of the core’s intrinsic low power modes, both the STM8S and STM32 devices areable to reduce the overall consumption at system-on-chip level.The power consumption in the Run and Wait modes can be reduced by one of the followingmeans:●Slowing down the system clocks: the consumption can thus be adjusted according to the performance required by the application. This is done using the prescalers includedin the clock controller.●Gating the clocks of the peripherals when they are not used to minimize the dynamic consumption related to the clock tree switching activity.The two products embed regulators to supply the internal logic at 1.8V . These regulatorshave a significant operating current in Run mode (a few tens of µA) where they are able todeliver currents in the mA or tens of mA range. In order to further reduce consumption, it ispossible to configure the regulator in low power mode, and minimize its quiescentconsumption, when the current necessary to supply the logic is in the µA range, typicallyduring the Halt or Stop mode. This mode offers the lowest consumption, with a wakeup timeslightly longer than the configuration using the regulator in Run mode.Software library AN294514/18 Doc ID 154684 Software libraryPeripheral compatibility throughout ST’s STM8 and STM32 MCU families promotes platformdesign and helps significantly switch from one product line to the other. When it comes todevelopment time, however, software support is essential. Extensive software libraries areavailable for both the STM8S and STM32 devices, providing the user with a hardwareabstraction layer (HAL) for all MCU resources. Moreover, there is not a single control/statusbit that is not covered by a C function or an API.The software library covers three abstraction levels, and it includes:1. a complete register address map with all bits, bit fields and registers declared in C. Byproviding this map, the software library makes the designers’ task much lighter and,even more importantly so, it gives all the benefits of a bug-free reference mapping file,thus speeding up the early project phase.2. a collection of routines and data structures in API form, that covers all peripheralfunctions. This collection can directly be used as a reference framework, since it alsoincludes macros for supporting core-related intrinsic features and common constantand data type definition. Moreover, it is compiler agnostic and can therefore be usedwith any existing or future toolchain. It was developed using the MISRA C automotivestandard.3.a set of examples covering all available IPs (85 examples so far for the STM32 family,57 for the STM8S family), with template projects for the most common developmenttoolchains. With the appropriate hardware evaluation board, only a few hours areneeded to get started with a brand new microcontroller.It is then up to you to choose how to use the library. Y ou can either pick up the files useful forthe design, use examples to get trained or quickly evaluate the product. Y ou can also usethe API to save development time.Let us now have a look at the few key files and concepts. Two separate libraries support theSTM8S and STM32F devices. In the file names below, you simply need to replace the“stmxxx_” prefix by “stm32f10x ” or “stm8s ” depending on the chosen product.●stmxxx_.hThis file is the only header file that must be included in the C source code, usually inmain.c . This file contains:–data structures and address mapping for all peripherals –macros to access peripheral register hardware (for bit manipulation for instance), plus STM8S core intrinsics – a configuration section used to select the device implemented in the targetapplication. Y ou also have the choice to use or not the peripheral drivers in theapplication code (that is code based on direct access to registers rather thanthrough API drivers)●stmxxx_conf.hThis is the peripheral driver configuration file, where you specify the peripherals youwants to use in your application, plus a few application-specific parameters such as thecrystal frequency.●stmxxx_it.cThis file contains the template IRQ handler to be filled, but this is already the firstdevelopment step!AN2945Software library Once you have understood the above operating principle and file organization, for simpleapplications, you could virtually switch from one product to the other without referring to thereference manual.Let us take a practical example: an SPI peripheral configured in master mode, used to readfrom/write to an external EEPROM.Figure4 and Figure5 below show the initialization code (using the software library) for anSTM8S and an STM32 product, respectively.Figure 4.STM8S code example/* --------------- Initialize SPI in Master mode -------------- */SPI_Init(SPI_FIRSTBIT_MSB,SPI_BAUDRATEPRESCALER_4,SPI_MODE_MASTER,SPI_CLOCKPOLARITY_LOW,SPI_CLOCKPHASE_2EDGE,SPI_DATADIRECTION_1LINE_TX,SPI_NSS_SOFT,0x07); /* CRC Polynomial *//* ------------------------- Enable SPI ----------------------- */SPI_Cmd(ENABLE);Figure 5.STM32 code example/* Private variables --------------------------------------- */SPI_InitTypeDef SPI_InitStructure;/* ---------------------- SPI1 Master ------------------------- */SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_4;SPI_InitStructure.SPI_Mode = SPI_Mode_Master;SPI_InitStructure.SPI_CPOL = SPI_CPOL_Low;SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;SPI_InitStructure.SPI_Direction = SPI_Direction_1Line_Tx;SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;SPI_InitStructure.SPI_CRCPolynomial = 7;SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;SPI_Init(SPI1, &SPI_InitStructure);/* ----------------------- Enable SPI1 ------------------------ */SPI_Cmd(SPI1, ENABLE);All parameters are identical, and the procedure is similar with two function calls for bothconfiguration and startup. The main difference lies in the way the parameters are passedinto the function. STM32 devices use a structure passed by address whereas, for STM8Sdevices, parameters are passed directly to minimize the amount of RAM needed during theinitialization phase (this is necessary with devices with down to 1 Kbyte of RAM).Another difference is the possibility, when using STM32 devices, of specifying the data size(8- or 16-bit) for the SPI. In the above example (Figure5), the data size is explicitly defined,however, the library is done so that it can be omitted: if this field is not initialized in thestructure, the 8-bit data size is used by default to maintain compatibility with STM8Sdevices.Doc ID 1546815/18Conclusion AN2945 5 ConclusionThis application note discusses the points that ease the transition from the 8-bit STM8S tothe 32-bit STM32 devices, and vice versa. Based on the 8- to 32-bit core performancecontinuum, the new STM32 and STM8S MCU families have a lot of common features. At theperipheral level, they share standard IPs like timers and communication interfaces. At thesystem level, they have identical features, reducing the external component count (clock andreset systems, safety features, etc).These common features are complemented by a set of software libraries that come as amajor help to get started for new development. The libraries can also serve as foundationsfor a unified development platform supporting both 8- and 32-bit MCUs owing to theabstraction level they both offer.Finally, the common features of the STM8S and STM32 devices with the benefits of theirsoftware libraries maximize design re-use and decrease time to market, specially if theapplication has derivatives with various requirements in terms of processing power,connectivity or control function complexity.16/18 Doc ID 15468AN2945Revision history Doc ID 1546817/186 Revision historyTable 6.Document revision history DateRevision Changes28-Jul-20091Initial release.AN2945Please Read Carefully:Information in this document is provided solely in connection with ST products. STMicroelectronics NV and its subsidiaries (“ST”) reserve the right to make changes, corrections, modifications or improvements, to this document, and the products and services described herein at any time, without notice.All ST products are sold pursuant to ST’s terms and conditions of sale.Purchasers are solely responsible for the choice, selection and use of the ST products and services described herein, and ST assumes no liability whatsoever relating to the choice, selection or use of the ST products and services described herein.No license, express or implied, by estoppel or otherwise, to any intellectual property rights is granted under this document. If any part of this document refers to any third party products or services it shall not be deemed a license grant by ST for the use of such third party products or services, or any intellectual property contained therein or considered as a warranty covering the use in any manner whatsoever of such third party products or services or any intellectual property contained therein.UNL ESS OTHERWISE SET FORTH IN ST’S TERMS AND CONDITIONS OF SAL E ST DISCL AIMS ANY EXPRESS OR IMPL IED WARRANTY WITH RESPECT TO THE USE AND/OR SAL E OF ST PRODUCTS INCL UDING WITHOUT L IMITATION IMPL IED WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE (AND THEIR EQUIVALENTS UNDER THE LAWS OF ANY JURISDICTION), OR INFRINGEMENT OF ANY PATENT, COPYRIGHT OR OTHER INTELLECTUAL PROPERTY RIGHT. UNL ESS EXPRESSL Y APPROVED IN WRITING BY AN AUTHORIZED ST REPRESENTATIVE, ST PRODUCTS ARE NOT RECOMMENDED, AUTHORIZED OR WARRANTED FOR USE IN MILITARY, AIR CRAFT, SPACE, LIFE SAVING, OR LIFE SUSTAINING APPLICATIONS, NOR IN PRODUCTS OR SYSTEMS WHERE FAILURE OR MALFUNCTION MAY RESULT IN PERSONAL INJURY, DEATH, OR SEVERE PROPERTY OR ENVIRONMENTAL DAMAGE. ST PRODUCTS WHICH ARE NOT SPECIFIED AS "AUTOMOTIVE GRADE" MAY ONLY BE USED IN AUTOMOTIVE APPLICATIONS AT USER’S OWN RISK.Resale of ST products with provisions different from the statements and/or technical features set forth in this document shall immediately void any warranty granted by ST for the ST product or service described herein and shall not create or extend in any manner whatsoever, any liability of ST.ST and the ST logo are trademarks or registered trademarks of ST in various countries.Information in this document supersedes and replaces all information previously supplied.The ST logo is a registered trademark of STMicroelectronics. All other names are the property of their respective owners.© 2009 STMicroelectronics - All rights reservedSTMicroelectronics group of companiesAustralia - Belgium - Brazil - Canada - China - Czech Republic - Finland - France - Germany - Hong Kong - India - Israel - Italy - Japan - Malaysia - Malta - Morocco - Philippines - Singapore - Spain - Sweden - Switzerland - United Kingdom - United States of America18/18Doc ID 15468 Rev 1。
德州仪器(TI)LM3S1960系列 规格书,Datasheet 资料

S T E L L A R I S E R R A T AStellaris ®LM3S1960RevA2ErrataThis document contains known errata at the time of publication for the Stellaris LM3S1960microcontroller.The table below summarizes the errata and lists the affected revisions.See the data sheet for more details.See also the ARM®Cortex™-M3errata,ARM publication number PR326-PRDC-009450v2.0.Table 1.Revision HistoryDescription Revision Date ■Added issue “Standard R-C network cannot be used on RST to extend POR timing”on page 5.■Clarified issue “General-purpose timer 16-bit Edge Count or Edge Time mode does not load reload value”on page 8to include Edge-Time mode.3.0August 2011■Added issue “Hibernation module does not operate correctly”on page 6,replacing previous Hibernation module errata items.■Minor edits and clarifications.2.10September 2010■Added issue “The RTRIS bit in the UARTRIS register is only set when the interrupt is enabled”on page 9.2.9July 2010■Added issue “External reset does not reset the XTAL to PLL Translation (PLLCFG)register”on page 5.2.8June 2010■Removed issue "Hibernation Module 4.194304-MHz oscillator supports a limited range of crystal load capacitance values"as it does not apply to this part.■Minor edits and clarifications.2.7May 2010■Removed issue "Writes to Hibernation module registers sometimes fail"as it does not apply to this part.■Added issue "Hibernation Module 4.194304-MHz oscillator supports a limited range of crystal load capacitance values."■Minor edits and clarifications.2.6April 2010■Removed issue "Setting Bit 7in I2C Master Timer Period (I2CMTPR)register may have unexpected results".The data sheet description has changed such that this is no longer necessary.■Minor edits and clarifications.2.5April 2010■Added issue “The General-Purpose Timer match register does not function correctly in 32-bit mode”on page 8.■Added issue "Setting Bit 7in I2C Master Timer Period (I2CMTPR)register may have unexpected results".2.4February 2010■"Hard Fault possible when waking from Sleep or Deep-Sleep modes and Cortex-M3Debug Access Port (DAP)is enabled"has been removed and the content added to the LM3S1960data sheet.2.3Jan 2010Started tracking revision history.2.2Dec 2009Stellaris LM3S1960A2Errata Table2.List of ErrataStellaris LM3S1960A2Errata1JTAG and Serial Wire Debug1.1JTAG pins do not have internal pull-ups enabled at power-on resetDescription:Following a power-on reset,the JTAG pins TRST,TCK,TMS,TDI,and TDO(PB7and PC[3:0])donot have internal pull-ups enabled.Consequently,if these pins are not driven from the board,twothings may happen:■The JTAG port may be held in reset and communication with a four-pin JTAG-based debugger may be intermittent or impossible.■The receivers may draw excess current.Workaround:There are a number of workarounds for this problem,varying in complexity and impact:1.Add external pull-up resistors to all of the affected pins.This workaround solves both issues ofJTAG connectivity and current consumption.2.Add an external pull-up resistor to TRST.Firmware should enable the internal pull-ups on theaffected pins by setting the appropriate PUE bits of the appropriate GPIO Pull-Up Select(GPIOPUR)registers as early in the reset handler as possible.This workaround addresses theissue of JTAG connectivity,but does not address the current consumption other than to limitthe affected period(from power-on reset to code execution).3.Pull-ups on the JTAG pins are unnecessary for code loaded via the SWD interface or via theserial boot loader.Loaded firmware should enable the internal pull-ups on the affected pins bysetting the appropriate PUE bits of the appropriate GPIOPUR registers as early in the resethandler as possible.This method does not address the current consumption other than to limitthe affected period(from power-on reset to code execution).Silicon Revision Affected:A21.2JTAG INTEST instruction does not workDescription:The JTAG INTEST(Boundary Scan)instruction does not properly capture data.Workaround:None.Silicon Revision Affected:A2Stellaris LM3S1960A2Errata2System Control2.1Clock source incorrect when waking up from Deep-Sleep mode insome configurationsDescription:In some clocking configurations,the core prematurely starts executing code before the main oscillator(MOSC)has stabilized after waking up from Deep-Sleep mode.This situation can cause undesirablebehavior for operations that are frequency dependent,such as UART communication.This issue occurs if the system is configured to run off the main oscillator,with the PLL bypassedand the DSOSCSRC field of the Deep-Sleep Clock Configuration(DSLPCLKCFG)register set touse the internal12-MHz oscillator,30-KHz internal oscillator,or32-KHz external oscillator.Whenthe system is triggered to wake up,the core should wait for the main oscillator to stabilize beforestarting to execute code.Instead,the core starts executing code while being clocked from thedeep-sleep clock source set in the DSLPCLKCFG register.When the main oscillator stabilizes,theclock to the core is properly switched to run from the main oscillator.Workaround:Run the system off of the main oscillator(MOSC)with the PLL enabled.In this mode,the clocksare switched at the proper time.If the main oscillator must be used to clock the system without the PLL,a simple wait loop at thebeginning of the interrupt handler for the wake-up event should be used to stall thefrequency-dependent operation until the main oscillator has stabilized.Silicon Revision Affected:A22.2PLL may not function properly at default LDO settingDescription:In designs that enable and use the PLL module,unstable device behavior may occur with the LDOset at its default of2.5volts or below(minimum of2.25volts).Designs that do not use the PLLmodule are not affected.Workaround:Prior to enabling the PLL module,it is recommended that the default LDO voltage setting of2.5Vbe adjusted to2.75V using the LDO Power Control(LDOPCTL)register.Silicon Revision Affected:A22.3I/O buffer5-V tolerance issueDescription:GPIO buffers are not5-V tolerant when used in open-drain mode.Pulling up the open-drain pinabove4V results in high current draw.Stellaris LM3S1960A2ErrataWorkaround:When configuring a pin as open drain,limit any pull-up resistor connections to the3.3-V power rail.Silicon Revision Affected:A22.4PLL Runs Fast When Using a3.6864-MHz CrystalDescription:If the PLL is enabled,and a3.6864-MHz crystal is used,the PLL runs4%fast.Workaround:Use a different crystal whose frequency is one of the other allowed crystal frequencies(see thevalues shown for the XTAL bit in the RCC register).Silicon Revision Affected:A22.5External reset does not reset the XTAL to PLL Translation(PLLCFG)registerDescription:Performing an external reset(anything but power-on reset)reconfigures the XTAL field in theRun-Mode Clock Configuration(RCC)register to the6MHz setting,but does not reset the XTALto PLL Translation(PLLCFG)register to the6MHz setting.Consider the following sequence:1.Performing a power-on reset results in XTAL=6MHz and PLLCFG=6MHz2.Write an8MHz value to the XTAL field results in XTAL=8MHz and PLLCFG=8MHz3.RST asserted results in XTAL=6MHz and PLLCFG=8MHzIn the last step,PLLCFG was not reset to its6MHz setting.If this step is followed by enabling thePLL to run from an attached6-MHz crystal,the PLL then operates at300MHz instead of400MHz.Subsequently configuring the XTAL field with the8MHz setting does not change the setting ofPLLCFG.Workaround:Set XTAL in PLLCFG to an incorrect value,and then to the desired value.The second changeupdates the register correctly.Do not enable the PLL until after the second change.Silicon Revision Affected:A22.6Standard R-C network cannot be used on RST to extend POR timingDescription:The standard R-C network on RST does not work to extend POR timing beyond the10ms on-chipPOR.Instead of following the standard capacitor charging curve,RST jumps straight to3V at powerStellaris LM3S1960A2Errataon.The capacitor is fully charged by current out of the RST pin and does not extend or filter thepower-on condition.As a result,the reset input is not extended beyond the POR.Workaround:Add a diode to block the output current from RST.This helps to extend the RST pulse,but alsomeans that the R-C is not as effective as a noise filter.Silicon Revision Affected:A23Hibernation Module3.1Hibernation module does not operate correctlyDescription:The Hibernation module on this microcontroller does not operate correctly.Workaround:This errata item does not apply to many Stellaris devices,including the LM3S1166,LM3S1636,LM3S1969,and LM3S2919.Refer to the Stellaris Product Selector Guide(/stellaris_search)and Errata documents to find an alternative microcontroller that meetsthe design requirements for your application.Silicon Revision Affected:A24Flash Controller4.1MERASE bit of the FMC register does not erase the entire FlasharrayDescription:The MERASE bit of the Flash Memory Control(FMC)register does not erase the entire Flash array.If the contents of the Flash Memory Address(FMA)register contain a value less than0x20000,only the first128KB of the Flash array are erased.If bit17(value of0x20000)is set,then only theupper address range of Flash(greater than128KB)is erased.Workaround:If the entire array must be erased,the following sequence is recommended:1.Write a value of0x00000000to the FMA register.2.Write a value of0xA4420004to the FMC register,and poll bit2until it is cleared.3.Write a value of0x00020000to the FMA register.4.Write a value of0xA4420004to the FMC register,and poll bit2until it is cleared.The entire array can also be erased by individually erasing all of the pages in the array.Stellaris LM3S1960A2ErrataSilicon Revision Affected:A25GPIO5.1GPIO input pin latches in the Low state if pad type is open drainDescription:GPIO pins function normally if configured as inputs and the open-drain configuration is disabled.Ifopen drain is enabled while the pin is configured as an input using the GPIO Alternate FunctionSelect(GPIOAFSEL),GPIO Open Drain Select(GPIOODR),and GPIO Direction(GPIODIR)registers,then the pin latches Low and excessive current(into pin)results if an attempt is made todrive the pin High.The open-drain device is not controllable.A GPIO pin is not normally configured as open drain and as an input at the same time.A user maywant to do this when driving a signal out of a GPIO open-drain pad while configuring the pad as aninput to read data on the same pin being driven by an external device.Bit-banging a bidirectional,open-drain bus(for example,I2C)is an example.Workaround:If a user wants to read the state of a GPIO pin on a bidirectional bus that is configured as anopen-drain output,the user must first disable the open-drain configuration and then change thedirection of the pin to an input.This precaution ensures that the pin is never configured as an inputand open drain at the same time.A second workaround is to use two GPIO pins connected to the same bus signal.The first GPIOpin is configured as an open-drain output,and the second is configured as a standard input.Thisway the open-drain output can control the state of the signal and the input pin allows the user toread the state of the signal without causing the latch-up condition.Silicon Revision Affected:A25.2GPIO pins may glitch during power supply ramp upDescription:Upon completing a POR(power on reset)sequence,the GPIO pins default to a tri-stated inputcondition.However,during the initial ramp up of the external V DD supply from0.0V to3.3V,theGPIO pins are momentarily configured as output drivers during the time the internal LDO circuit isalso ramping up.As a result,a signal glitch may occur on GPIO pins before both the external V DDsupply and internal LDO voltages reach their normal operating conditions.This situation can occurwhen the V DD and LDO voltages ramp up at significantly different rates.The LDO voltage ramp-uptime is affected by the load capacitance on the LDO pin,therefore,it is important to keep this loadat a nominal1µF value as recommended in the data sheet.Adding significant more capacitanceloading beyond the specification causes the time delay between the two supply ramp-up times togrow,which possibly increases the severity of the glitching behavior.Workaround:Ensuring that the V DD power supply ramp up is a fast as possible helps minimize the potential forGPIO glitches.Follow guidelines for LDO pin capacitive loading documented in the electrical sectionStellaris LM3S1960A2Errataof the data sheet.System designers must ensure that,during the V DD supply ramp-up time,possibleGPIO pin glitches can cause no adverse effects to their systems.Silicon Revision Affected:A26General-Purpose Timers6.1General-purpose timer Edge Count mode count error when timeris disabledDescription:When a general-purpose timer is configured for16-Bit Input Edge Count Mode,the timer(A or B)erroneously decrements by one when the Timer Enable(TnEN)bit in the GPTM Control(GPTMCTL)register is cleared(the timer is disabled).Workaround:When the general-purpose timer is configured for Edge Count mode and software needs to“stop”the timer,the timer should be reloaded with the current count+1and restarted.Silicon Revision Affected:A26.2General-purpose timer16-bit Edge Count or Edge Time mode doesnot load reload valueDescription:In Edge Count or Edge Time mode,the input events on the CCP pin decrement the counter until thecount matches what is in the GPTM Timern Match(GPTMTnMATCHR)register.At that point,aninterrupt is asserted and then the counter should be reloaded with the original value and countingbegins again.However,the reload value is not reloaded into the timer.Workaround:Rewrite the GPTM Timern Interval Load(GPTMTnILR)register before restarting.Silicon Revision Affected:A26.3The General-Purpose Timer match register does not functioncorrectly in32-bit modeDescription:The GPTM Timer A Match(GPTMTAMATCHR)register triggers a match interrupt when the lower16bits match,regardless of the value of the upper16bits.Workaround:None.Stellaris LM3S1960A2ErrataSilicon Revision Affected:A27UART7.1The RTRIS bit in the UARTRIS register is only set when the interruptis enabledDescription:The RTRIS(UART Receive Time-Out Raw Interrupt Status)bit in the UART Raw Interrupt Status(UARTRIS)register should be set when a receive time-out occurs,regardless of the state of theenable RTIM bit in the UART Interrupt Mask(UARTIM)register.However,currently the RTIM bitmust be set in order for the RTRIS bit to be set when a receive time-out occurs.Workaround:For applications that require polled operation,the RTIM bit can be set while the UART interrupt isdisabled in the NVIC using the IntDisable(n)function in the StellarisWare Peripheral Driver Library,where n is21,22,or49depending whether UART0,UART1or UART2is used.With thisconfiguration,software can poll the RTRIS bit,but the interrupt is not reported to the NVIC.Silicon Revision Affected:A28PWM8.1PWM pulses cannot be smaller than dead-band timeDescription:The dead-band generator in the PWM module has undesirable effects when receiving input pulsesfrom the PWM generator that are shorter than the dead-band time.For example,providing a4-clock-wide pulse into the dead-band generator with dead-band times of20clocks(for both risingand falling edges)produces a signal on the primary(non-inverted)output that is High except for40clocks(the combined rising and falling dead-band times),and the secondary(inverted)output isalways Low.Workaround:User software must ensure that the input pulse width to the dead-band generator is greater thanthe dead-band delays.Silicon Revision Affected:A28.2PWM interrupt clear misses in some instancesDescription:It is not possible to clear a PWM generator interrupt in the same cycle when another interrupt fromthe same PWM generator is being asserted.PWM generator interrupts are cleared by writing a1to the corresponding bit in the PWM Interrupt Status and Clear(PWMnISC)register.If a write toclear the interrupt is missed because another interrupt in that PWM generator is being asserted,Stellaris LM3S1960A2Erratathe interrupt condition still exists,and the PWM interrupt routine is called again.System problemscould result if an interrupt condition was already properly handled the first time,and the softwaretries to handle it again.Note that even if an interrupt event has not been enabled in the PWMInterrupt and Trigger Enable(PWMnINTEN)register,the interrupt is still asserted in the PWMRaw Interrupt Status(PWMnRIS)register.Workaround:In most instances,performing a double-write to clear the interrupt greatly decreases the chancethat the write to clear the interrupt occurs on the same cycle as another interrupt.Because eachgenerator has six possible interrupt events,writing the PWMnISC register six times in a rowguarantees that the interrupt is cleared.If the period of the PWM is small enough,however,thismethod may not be practical for the application.Silicon Revision Affected:A28.3PWM generation is incorrect with extreme duty cyclesDescription:If a PWM generator is configured for Count-Up/Down mode,and the PWM Load(PWMnLOAD)register is set to a value N,setting the compare to a value of1or N-1results in steady state signalsinstead of a PWM signal.For example,if the user configures PWM0as follows:■PWMENABLE=0x00000001–PWM0Enabled■PWM0CTL=0x00000007–Debug mode enabled–Count-Up/Down mode–Generator enabled■PWM0LOAD=0x00000063–Load is99(decimal),so in Count-Up/Down mode the counter counts from zero to99and back down to zero(200clocks per period)■PWM0GENA=0x000000b0–Output High when the counter matches comparator A while counting up–Output Low when the counter matches comparator A while counting down■PWM0DBCTL=0x00000000–Dead-band generator is disabledIf the PWM0Compare A(PWM0CMPA)value is set to0x00000062(N-1),PWM0should output a2-clock-cycle long High pulse.Instead,the PWM0output is a constant High value.If the PWM0CMPA value is set to0x00000001,PWM0should output a2-clock-cycle long negative(Low)pulse.Instead,the PWM0output is a constant Low value.Stellaris LM3S1960A2ErrataWorkaround:User software must ensure that when using the PWM Count-Up/Down mode,the compare valuesmust never be1or the PWMnLOAD value minus one(N-1).Silicon Revision Affected:A28.4PWMINTEN register bit does not function correctlyDescription:In the PWM Interrupt Enable(PWMINTEN)register,the IntPWM0(bit0)bit does not functioncorrectly and has no effect on the interrupt status to the ARM Cortex-M3processor.This bit shouldnot be used.Workaround:PWM interrupts to the processor should be controlled with the use of the PWM0-PWM2Interruptand Trigger Enable(PWMnINTEN)registers.Silicon Revision Affected:A28.5Sync of PWM does not trigger"zero"actionDescription:If the PWM Generator Control(PWM0GENA)register has the ActZero field set to0x2,then theoutput is set to0when the counter reaches0,as expected.However,if the counter is cleared bysetting the appropriate bit in the PWM Time Base Sync(PWMSYNC)register,then the"zero"actionis not triggered,and the output is not set to0.Workaround:None.Silicon Revision Affected:A28.6PWM"zero"action occurs when the PWM module is disabledDescription:The zero pulse may be asserted when the PWM module is disabled.Workaround:None.Silicon Revision Affected:A2August04,2011/Rev.3.011Texas Instruments9QEI 9.1QEI index resets position when index is disabledDescription:When the QEI module is configured to not reset the position on detection of the index signal (thatis,the ResMode bit in the QEI Control (QEICTL)register is 0),the module resets the position whenthe index pulse occurs.The position counter should only be reset when it reaches the maximumvalue set in the QEI Maximum Position (QEIMAXPOS)register.Workaround:Do not rely on software to disable the index pulse.Do not connect the index pulse if it is not needed.Silicon Revision Affected:A29.2QEI hardware position can be wrong under certain conditionsDescription:The QEI Position (QEIPOS)register can be incorrect if the QEI is configured for quadrature phasemode (SigMode bit in QEICTL register =0)and to update the position counter of every edge ofboth PhA and PhB (CapMode bit in QEICTL register =1).This error can occur if the encoder isstepped in the reverse direction,stepped forward once,and then continues in the reverse direction.The following sequence of transitions on the PhA and PhB pins causes the error:PhBAssuming the starting position prior to the above PhA and PhB sequence is 0,the position after thefalling edge on PhB should be -3,however the QEIPOS register will show the position to be -1.Workaround:Configure the QEI to update the position counter on every edge on PhA only (CapMode bit in QEICTLregister =0).The effective resolution is reduced by 50%.If full resolution position detection is requiredby updating the position counter on every edge of both PhA and PhB ,no workaround is available.Hardware and software must take this into account.Silicon Revision Affected:A2August 04,2011/Rev.3.0Texas Instruments12Stellaris LM3S1960A2ErrataCopyright©2007-2011Texas Instruments Incorporated All rights reserved.Stellaris and StellarisWare are registered trademarks of Texas Instruments Incorporated.ARM and Thumb are registered trademarks and Cortex is a trademark of ARM Limited.Other names and brands may be claimed as the property of others.Texas Instruments Incorporated108Wild Basin,Suite350Austin,TX78746/stellaris/sc/technical-support/product-information-centers.htmAugust04,2011/Rev.3.0Texas Instruments13IMPORTANT NOTICETexas Instruments Incorporated and its subsidiaries(TI)reserve the right to make corrections,modifications,enhancements,improvements, and other changes to its products and services at any time and to discontinue any product or service without notice.Customers should obtain the latest relevant information before placing orders and should verify that such information is current and complete.All products are sold subject to TI’s terms and conditions of sale supplied at the time of order acknowledgment.TI warrants performance of its hardware products to the specifications applicable at the time of sale in accordance with TI’s standard warranty.Testing and other quality control techniques are used to the extent TI deems necessary to support this warranty.Except where mandated by government requirements,testing of all parameters of each product is not necessarily performed.TI assumes no liability for applications assistance or customer product design.Customers are responsible for their products and applications using TI components.To minimize the risks associated with customer products and applications,customers should provide adequate design and operating safeguards.TI does not warrant or represent that any license,either express or implied,is granted under any TI patent right,copyright,mask work right, or other TI intellectual property right relating to any combination,machine,or process in which TI products or services are rmation published by TI regarding third-party products or services does not constitute a license from TI to use such products or services or a warranty or endorsement e of such information may require a license from a third party under the patents or other intellectual property of the third party,or a license from TI under the patents or other intellectual property of TI.Reproduction of TI information in TI data books or data sheets is permissible only if reproduction is without alteration and is accompanied by all associated warranties,conditions,limitations,and notices.Reproduction of this information with alteration is an unfair and deceptive business practice.TI is not responsible or liable for such altered rmation of third parties may be subject to additional restrictions.Resale of TI products or services with statements different from or beyond the parameters stated by TI for that product or service voids all express and any implied warranties for the associated TI product or service and is an unfair and deceptive business practice.TI is not responsible or liable for any such statements.TI products are not authorized for use in safety-critical applications(such as life support)where a failure of the TI product would reasonably be expected to cause severe personal injury or death,unless officers of the parties have executed an agreement specifically governing such use.Buyers represent that they have all necessary expertise in the safety and regulatory ramifications of their applications,and acknowledge and agree that they are solely responsible for all legal,regulatory and safety-related requirements concerning their products and any use of TI products in such safety-critical applications,notwithstanding any applications-related information or support that may be provided by TI.Further,Buyers must fully indemnify TI and its representatives against any damages arising out of the use of TI products in such safety-critical applications.TI products are neither designed nor intended for use in military/aerospace applications or environments unless the TI products are specifically designated by TI as military-grade or"enhanced plastic."Only products designated by TI as military-grade meet military specifications.Buyers acknowledge and agree that any such use of TI products which TI has not designated as military-grade is solely at the Buyer's risk,and that they are solely responsible for compliance with all legal and regulatory requirements in connection with such use. TI products are neither designed nor intended for use in automotive applications or environments unless the specific TI products are designated by TI as compliant with ISO/TS16949requirements.Buyers acknowledge and agree that,if they use any non-designated products in automotive applications,TI will not be responsible for any failure to meet such requirements.Following are URLs where you can obtain information on other Texas Instruments products and application solutions:Products ApplicationsAudio /audio Communications and Telecom /communicationsAmplifiers Computers and Peripherals /computersData Converters Consumer Electronics /consumer-appsDLP®Products Energy and Lighting /energyDSP Industrial /industrialClocks and Timers /clocks Medical /medicalInterface Security /securityLogic Space,Avionics and Defense /space-avionics-defense Power Mgmt Transportation and Automotive /automotiveMicrocontrollers Video and Imaging /videoRFID OMAP Mobile Processors /omapWireless Connctivity /wirelessconnectivityTI E2E Community Home Page Mailing Address:Texas Instruments,Post Office Box655303,Dallas,Texas75265Copyright©2011,Texas Instruments Incorporated。
TI MCU选型指南

IMPORTANT NOTICETexas Instruments Incorporated and its subsidiaries(TI)reserve the right to make corrections,modifications,enhancements,improvements, and other changes to its products and services at any time and to discontinue any product or service without notice.Customers should obtain the latest relevant information before placing orders and should verify that such information is current and complete.All products are sold subject to TI’s terms and conditions of sale supplied at the time of order acknowledgment.TI warrants performance of its hardware products to the specifications applicable at the time of sale in accordance with TI’s standard warranty.Testing and other quality control techniques are used to the extent TI deems necessary to support this warranty.Except where mandated by government requirements,testing of all parameters of each product is not necessarily performed.TI assumes no liability for applications assistance or customer product design.Customers are responsible for their products and applications using TI components.To minimize the risks associated with customer products and applications,customers should provide adequate design and operating safeguards.TI does not warrant or represent that any license,either express or implied,is granted under any TI patent right,copyright,mask work right, or other TI intellectual property right relating to any combination,machine,or process in which TI products or services are rmation published by TI regarding third-party products or services does not constitute a license from TI to use such products or services or a warranty or endorsement e of such information may require a license from a third party under the patents or other intellectual property of the third party,or a license from TI under the patents or other intellectual property of TI.Reproduction of TI information in TI data books or data sheets is permissible only if reproduction is without alteration and is accompanied by all associated warranties,conditions,limitations,and notices.Reproduction of this information with alteration is an unfair and deceptive business practice.TI is not responsible or liable for such altered rmation of third parties may be subject to additional restrictions.Resale of TI products or services with statements different from or beyond the parameters stated by TI for that product or service voids all express and any implied warranties for the associated TI product or service and is an unfair and deceptive business practice.TI is not responsible or liable for any such statements.TI products are not authorized for use in safety-critical applications(such as life support)where a failure of the TI product would reasonably be expected to cause severe personal injury or death,unless officers of the parties have executed an agreement specifically governing such use.Buyers represent that they have all necessary expertise in the safety and regulatory ramifications of their applications,and acknowledge and agree that they are solely responsible for all legal,regulatory and safety-related requirements concerning their products and any use of TI products in such safety-critical applications,notwithstanding any applications-related information or support that may be provided by TI.Further,Buyers must fully indemnify TI and its representatives against any damages arising out of the use of TI products in such safety-critical applications.TI products are neither designed nor intended for use in military/aerospace applications or environments unless the TI products are specifically designated by TI as military-grade or"enhanced plastic."Only products designated by TI as military-grade meet military specifications.Buyers acknowledge and agree that any such use of TI products which TI has not designated as military-grade is solely at the Buyer's risk,and that they are solely responsible for compliance with all legal and regulatory requirements in connection with such use. TI products are neither designed nor intended for use in automotive applications or environments unless the specific TI products are designated by TI as compliant with ISO/TS16949requirements.Buyers acknowledge and agree that,if they use any non-designated products in automotive applications,TI will not be responsible for any failure to meet such requirements.Following are URLs where you can obtain information on other Texas Instruments products and application solutions:Products ApplicationsAudio /audio Automotive and Transportation /automotiveAmplifiers Communications and Telecom /communicationsData Converters Computers and Peripherals /computersDLP®Products Consumer Electronics /consumer-appsDSP Energy and Lighting /energyClocks and Timers /clocks Industrial /industrialInterface Medical /medicalLogic Security /securityPower Mgmt Space,Avionics and Defense /space-avionics-defense Microcontrollers Video and Imaging /videoRFID OMAP Mobile Processors /omapWireless Connectivity /wirelessconnectivityTI E2E Community Home Page Mailing Address:Texas Instruments,Post Office Box655303,Dallas,Texas75265Copyright©2012,Texas Instruments Incorporated。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
S T E L L A R I S E R R A T AStellaris ®LM3S2948RevA2ErrataThis document contains known errata at the time of publication for the Stellaris LM3S2948microcontroller.The table below summarizes the errata and lists the affected revisions.See the data sheet for more details.See also the ARM®Cortex™-M3errata,ARM publication number PR326-PRDC-009450v2.0.Table 1.Revision HistoryDescription Revision Date ■Added issue “Standard R-C network cannot be used on RST to extend POR timing”on page 5.■Clarified issue “General-purpose timer 16-bit Edge Count or Edge Time mode does not load reload value”on page 8to include Edge-Time mode.■Added issue “Retriggering a sample sequencer before it has completed the current sequence results in continuous sampling”on page 10.3.0August 2011■Added issue “Hibernation module does not operate correctly”on page 6,replacing previous Hibernation module errata items.■Minor edits and clarifications.2.10September 2010■Added issue “The RTRIS bit in the UARTRIS register is only set when the interrupt is enabled”on page 10.2.9July 2010■Added issue “External reset does not reset the XTAL to PLL Translation (PLLCFG)register”on page 5.2.8June 2010■Removed issue "Hibernation Module 4.194304-MHz oscillator supports a limited range of crystal load capacitance values"as it does not apply to this part.■Minor edits and clarifications.2.7May 2010■Removed issue "Writes to Hibernation module registers sometimes fail"as it does not apply to this part.■Added issue "Hibernation Module 4.194304-MHz oscillator supports a limited range of crystal load capacitance values."■Minor edits and clarifications.2.6April 2010■Removed issue "Setting Bit 7in I2C Master Timer Period (I2CMTPR)register may have unexpected results".The data sheet description has changed such that this is no longer necessary.■Minor edits and clarifications.2.5April 2010■Added issue “The General-Purpose Timer match register does not function correctly in 32-bit mode”on page 8.■Added issue "Setting Bit 7in I2C Master Timer Period (I2CMTPR)register may have unexpected results".2.4February 2010■"Hard Fault possible when waking from Sleep or Deep-Sleep modes and Cortex-M3Debug Access Port (DAP)is enabled"has been removed and the content added to the LM3S2948data sheet.2.3Jan 2010Started tracking revision history.2.2Dec 2009Stellaris LM3S2948A2Errata Table2.List of ErrataStellaris LM3S2948A2Errata1JTAG and Serial Wire Debug1.1JTAG pins do not have internal pull-ups enabled at power-on resetDescription:Following a power-on reset,the JTAG pins TRST,TCK,TMS,TDI,and TDO(PB7and PC[3:0])donot have internal pull-ups enabled.Consequently,if these pins are not driven from the board,twothings may happen:■The JTAG port may be held in reset and communication with a four-pin JTAG-based debugger may be intermittent or impossible.■The receivers may draw excess current.Workaround:There are a number of workarounds for this problem,varying in complexity and impact:1.Add external pull-up resistors to all of the affected pins.This workaround solves both issues ofJTAG connectivity and current consumption.2.Add an external pull-up resistor to TRST.Firmware should enable the internal pull-ups on theaffected pins by setting the appropriate PUE bits of the appropriate GPIO Pull-Up Select(GPIOPUR)registers as early in the reset handler as possible.This workaround addresses theissue of JTAG connectivity,but does not address the current consumption other than to limitthe affected period(from power-on reset to code execution).3.Pull-ups on the JTAG pins are unnecessary for code loaded via the SWD interface or via theserial boot loader.Loaded firmware should enable the internal pull-ups on the affected pins bysetting the appropriate PUE bits of the appropriate GPIOPUR registers as early in the resethandler as possible.This method does not address the current consumption other than to limitthe affected period(from power-on reset to code execution).Silicon Revision Affected:A21.2JTAG INTEST instruction does not workDescription:The JTAG INTEST(Boundary Scan)instruction does not properly capture data.Workaround:None.Silicon Revision Affected:A2Stellaris LM3S2948A2Errata2System Control2.1Clock source incorrect when waking up from Deep-Sleep mode insome configurationsDescription:In some clocking configurations,the core prematurely starts executing code before the main oscillator(MOSC)has stabilized after waking up from Deep-Sleep mode.This situation can cause undesirablebehavior for operations that are frequency dependent,such as UART communication.This issue occurs if the system is configured to run off the main oscillator,with the PLL bypassedand the DSOSCSRC field of the Deep-Sleep Clock Configuration(DSLPCLKCFG)register set touse the internal12-MHz oscillator,30-KHz internal oscillator,or32-KHz external oscillator.Whenthe system is triggered to wake up,the core should wait for the main oscillator to stabilize beforestarting to execute code.Instead,the core starts executing code while being clocked from thedeep-sleep clock source set in the DSLPCLKCFG register.When the main oscillator stabilizes,theclock to the core is properly switched to run from the main oscillator.Workaround:Run the system off of the main oscillator(MOSC)with the PLL enabled.In this mode,the clocksare switched at the proper time.If the main oscillator must be used to clock the system without the PLL,a simple wait loop at thebeginning of the interrupt handler for the wake-up event should be used to stall thefrequency-dependent operation until the main oscillator has stabilized.Silicon Revision Affected:A22.2PLL may not function properly at default LDO settingDescription:In designs that enable and use the PLL module,unstable device behavior may occur with the LDOset at its default of2.5volts or below(minimum of2.25volts).Designs that do not use the PLLmodule are not affected.Workaround:Prior to enabling the PLL module,it is recommended that the default LDO voltage setting of2.5Vbe adjusted to2.75V using the LDO Power Control(LDOPCTL)register.Silicon Revision Affected:A22.3I/O buffer5-V tolerance issueDescription:GPIO buffers are not5-V tolerant when used in open-drain mode.Pulling up the open-drain pinabove4V results in high current draw.Stellaris LM3S2948A2ErrataWorkaround:When configuring a pin as open drain,limit any pull-up resistor connections to the3.3-V power rail.Silicon Revision Affected:A22.4PLL Runs Fast When Using a3.6864-MHz CrystalDescription:If the PLL is enabled,and a3.6864-MHz crystal is used,the PLL runs4%fast.Workaround:Use a different crystal whose frequency is one of the other allowed crystal frequencies(see thevalues shown for the XTAL bit in the RCC register).Silicon Revision Affected:A22.5External reset does not reset the XTAL to PLL Translation(PLLCFG)registerDescription:Performing an external reset(anything but power-on reset)reconfigures the XTAL field in theRun-Mode Clock Configuration(RCC)register to the6MHz setting,but does not reset the XTALto PLL Translation(PLLCFG)register to the6MHz setting.Consider the following sequence:1.Performing a power-on reset results in XTAL=6MHz and PLLCFG=6MHz2.Write an8MHz value to the XTAL field results in XTAL=8MHz and PLLCFG=8MHz3.RST asserted results in XTAL=6MHz and PLLCFG=8MHzIn the last step,PLLCFG was not reset to its6MHz setting.If this step is followed by enabling thePLL to run from an attached6-MHz crystal,the PLL then operates at300MHz instead of400MHz.Subsequently configuring the XTAL field with the8MHz setting does not change the setting ofPLLCFG.Workaround:Set XTAL in PLLCFG to an incorrect value,and then to the desired value.The second changeupdates the register correctly.Do not enable the PLL until after the second change.Silicon Revision Affected:A22.6Standard R-C network cannot be used on RST to extend POR timingDescription:The standard R-C network on RST does not work to extend POR timing beyond the10ms on-chipPOR.Instead of following the standard capacitor charging curve,RST jumps straight to3V at powerStellaris LM3S2948A2Errataon.The capacitor is fully charged by current out of the RST pin and does not extend or filter thepower-on condition.As a result,the reset input is not extended beyond the POR.Workaround:Add a diode to block the output current from RST.This helps to extend the RST pulse,but alsomeans that the R-C is not as effective as a noise filter.Silicon Revision Affected:A23Hibernation Module3.1Hibernation module does not operate correctlyDescription:The Hibernation module on this microcontroller does not operate correctly.Workaround:This errata item does not apply to many Stellaris devices,including the LM3S1166,LM3S1636,LM3S1969,and LM3S2919.Refer to the Stellaris Product Selector Guide(/stellaris_search)and Errata documents to find an alternative microcontroller that meetsthe design requirements for your application.Silicon Revision Affected:A24Flash Controller4.1MERASE bit of the FMC register does not erase the entire FlasharrayDescription:The MERASE bit of the Flash Memory Control(FMC)register does not erase the entire Flash array.If the contents of the Flash Memory Address(FMA)register contain a value less than0x20000,only the first128KB of the Flash array are erased.If bit17(value of0x20000)is set,then only theupper address range of Flash(greater than128KB)is erased.Workaround:If the entire array must be erased,the following sequence is recommended:1.Write a value of0x00000000to the FMA register.2.Write a value of0xA4420004to the FMC register,and poll bit2until it is cleared.3.Write a value of0x00020000to the FMA register.4.Write a value of0xA4420004to the FMC register,and poll bit2until it is cleared.The entire array can also be erased by individually erasing all of the pages in the array.Stellaris LM3S2948A2ErrataSilicon Revision Affected:A25GPIO5.1GPIO input pin latches in the Low state if pad type is open drainDescription:GPIO pins function normally if configured as inputs and the open-drain configuration is disabled.Ifopen drain is enabled while the pin is configured as an input using the GPIO Alternate FunctionSelect(GPIOAFSEL),GPIO Open Drain Select(GPIOODR),and GPIO Direction(GPIODIR)registers,then the pin latches Low and excessive current(into pin)results if an attempt is made todrive the pin High.The open-drain device is not controllable.A GPIO pin is not normally configured as open drain and as an input at the same time.A user maywant to do this when driving a signal out of a GPIO open-drain pad while configuring the pad as aninput to read data on the same pin being driven by an external device.Bit-banging a bidirectional,open-drain bus(for example,I2C)is an example.Workaround:If a user wants to read the state of a GPIO pin on a bidirectional bus that is configured as anopen-drain output,the user must first disable the open-drain configuration and then change thedirection of the pin to an input.This precaution ensures that the pin is never configured as an inputand open drain at the same time.A second workaround is to use two GPIO pins connected to the same bus signal.The first GPIOpin is configured as an open-drain output,and the second is configured as a standard input.Thisway the open-drain output can control the state of the signal and the input pin allows the user toread the state of the signal without causing the latch-up condition.Silicon Revision Affected:A25.2GPIO pins may glitch during power supply ramp upDescription:Upon completing a POR(power on reset)sequence,the GPIO pins default to a tri-stated inputcondition.However,during the initial ramp up of the external V DD supply from0.0V to3.3V,theGPIO pins are momentarily configured as output drivers during the time the internal LDO circuit isalso ramping up.As a result,a signal glitch may occur on GPIO pins before both the external V DDsupply and internal LDO voltages reach their normal operating conditions.This situation can occurwhen the V DD and LDO voltages ramp up at significantly different rates.The LDO voltage ramp-uptime is affected by the load capacitance on the LDO pin,therefore,it is important to keep this loadat a nominal1µF value as recommended in the data sheet.Adding significant more capacitanceloading beyond the specification causes the time delay between the two supply ramp-up times togrow,which possibly increases the severity of the glitching behavior.Workaround:Ensuring that the V DD power supply ramp up is a fast as possible helps minimize the potential forGPIO glitches.Follow guidelines for LDO pin capacitive loading documented in the electrical sectionStellaris LM3S2948A2Errataof the data sheet.System designers must ensure that,during the V DD supply ramp-up time,possibleGPIO pin glitches can cause no adverse effects to their systems.Silicon Revision Affected:A26General-Purpose Timers6.1General-purpose timer Edge Count mode count error when timeris disabledDescription:When a general-purpose timer is configured for16-Bit Input Edge Count Mode,the timer(A or B)erroneously decrements by one when the Timer Enable(TnEN)bit in the GPTM Control(GPTMCTL)register is cleared(the timer is disabled).Workaround:When the general-purpose timer is configured for Edge Count mode and software needs to“stop”the timer,the timer should be reloaded with the current count+1and restarted.Silicon Revision Affected:A26.2General-purpose timer16-bit Edge Count or Edge Time mode doesnot load reload valueDescription:In Edge Count or Edge Time mode,the input events on the CCP pin decrement the counter until thecount matches what is in the GPTM Timern Match(GPTMTnMATCHR)register.At that point,aninterrupt is asserted and then the counter should be reloaded with the original value and countingbegins again.However,the reload value is not reloaded into the timer.Workaround:Rewrite the GPTM Timern Interval Load(GPTMTnILR)register before restarting.Silicon Revision Affected:A26.3The General-Purpose Timer match register does not functioncorrectly in32-bit modeDescription:The GPTM Timer A Match(GPTMTAMATCHR)register triggers a match interrupt when the lower16bits match,regardless of the value of the upper16bits.Workaround:None.Stellaris LM3S2948A2ErrataSilicon Revision Affected:A27ADC7.1Use of"Always"triggering for ADC Sample Sequencer3does notworkDescription:When using ADC Sample Sequencer3(SS3)and configuring the trigger source to"Always"toenable continuous sampling by programming the SS3Trigger Select field(EM3)in the ADC EventMultiplexer Select(ADCEMUX)register to0xF,the first sample will be captured,but no furthersamples will be updated to the sequencer FIFO.Interrupts are continuously generated after the firstsample and the FIFO status remains empty.Workaround:Software must disable and re-enable the sample sequencer to capture another sample.Silicon Revision Affected:A27.2Incorrect behavior with timer ADC triggering when another timeris used in32-bit modeDescription:When a timer is configured to trigger the ADC and another timer is configured to be a32-bit periodicor one-shot timer,the ADC is triggered continuously instead of the specified interval.Workaround:Do not use a32-bit periodic or one-shot timer when triggering ADC.If the timer is in16-bit mode,the ADC trigger works as expected.Silicon Revision Affected:A27.3ADC hardware averaging produces erroneous results in differentialmodeDescription:The implementation of the ADC averaging circuit does not work correctly when the ADC is samplingin differential mode and the difference between the voltages is approximately0.0V.Workaround:Do not use hardware averaging in differential mode.Instead,use the FIFO to store results andaverage them in software.Silicon Revision Affected:A2Stellaris LM3S2948A2Errata7.4Retriggering a sample sequencer before it has completed thecurrent sequence results in continuous samplingDescription:Re-triggering a sample sequencer before it has completed its programmed conversion sequencecauses the sample sequencer to continuously sample.If interrupts have been enabled,interruptsare generated at the appropriate place in the sample sequence.This problem only occurs when thenew trigger is the same type as the current trigger.Workaround:Ensure that a sample sequence has completed before triggering a new sequence using the sametype of trigger.Silicon Revision Affected:A28UART8.1The RTRIS bit in the UARTRIS register is only set when the interruptis enabledDescription:The RTRIS(UART Receive Time-Out Raw Interrupt Status)bit in the UART Raw Interrupt Status(UARTRIS)register should be set when a receive time-out occurs,regardless of the state of theenable RTIM bit in the UART Interrupt Mask(UARTIM)register.However,currently the RTIM bitmust be set in order for the RTRIS bit to be set when a receive time-out occurs.Workaround:For applications that require polled operation,the RTIM bit can be set while the UART interrupt isdisabled in the NVIC using the IntDisable(n)function in the StellarisWare Peripheral Driver Library,where n is21,22,or49depending whether UART0,UART1or UART2is used.With thisconfiguration,software can poll the RTRIS bit,but the interrupt is not reported to the NVIC.Silicon Revision Affected:A29CAN9.1CAN register accesses require software delaysDescription:Because of a synchronization issue between the processor clock and the8-MHz CAN clock,bothread and write accesses to CAN registers require a software delay in order to ensure proper operation.If this delay is not observed between reads or writes,then register data corruption will occur,causingproblems that are difficult to debug.Due to the nature of the synchronization issue,write accessesand read accesses have slightly different issues.When performing CAN register write accesses,a delay is required between successive writes toany CAN register.The amount of delay required is related to the ratio of the processor clock to theStellaris LM3S2948A2Errata CAN clock.For example,if the processor clock is4times greater than the CAN clock,then theremust be a4-processor-cycle gap between successive writes to the CAN controller.However,in thecase that the processor clock is less than or equal to the CAN clock,then there are no write accesslimitations.When performing CAN register read accesses,a delay is required between the reads of the CANregisters.The difference with read accesses is that all read accesses to CAN registers must performa double read to receive the correct data.The first read initiates the read request to the CAN controllerand the second read access retrieves the data.This sequence cannot be interrupted by anotherread to the same CAN controller or the data read by the second read access will have invalid data.This means that code that reads the CAN registers must protect this read/delay/read sequence fromother asynchronous code,such as interrupt handlers,that access the same CAN controller.Likethe case for writing CAN registers,the delay between successive reads to CAN registers is relatedto the ratio of the processor to the CAN clock.For example,if the processor clock is4times greaterthan the CAN clock,then there must be a4-cycle gap between reads.However,unlike the writecase,when the processor clock is less than or equal to the CAN clock,there still must be a2-processor cycle delay between read accesses in order to retrieve the correct data.Because thiserratum will be fixed in future revisions,software should not take advantage of"pipelining"readoperations to help improve access time to the CAN registers.This scheme will not work in futureversions of the microcontroller and should be avoided.Debugger accesses to the CAN registers will also show these issues,usually when debuggersperform read accesses to display the register data in a memory window,or in some cases,a registerdisplay window.The data displayed in the memory window will not show the correct data for theCAN registers.In most cases,the read accesses are slow and in sequence so they will show theCAN registers in the memory window offset by one word.However,this cannot be guaranteed asthe debugger could possibly read the registers too quickly or not in address order and display invaliddata.Workaround:In order to safely read or write the CAN registers,delays must be inserted for the correct numberof cycles.Writes can delay before or after the CAN register write depending on the system needs,while reads must always perform a double-read to get data back from the CAN register.The StellarisPeripheral Driver Library(DriverLib)provides the following two functions to perform the delaysnecessary for reading or writing the CAN registers:CANReadReg and CANWriteReg.The defaultbehavior is tuned for a50-MHz processor clock via the define(CAN_RW_DELAY)in the can.c fileof DriverLib.If the processor clock is lower,this value can be changed and DriverLib can be rebuiltfor more optimal performance.Care should be taken when adjusting this value as different compilersmay generate the looping code differently.When this errata is fixed,future releases of DriverLib willreplace these functions with direct hardware accesses to the registers.As an example,the amount of delay necessary if the processor clock is25MHz and the CAN clockis8MHz is3.125processor clocks or at least4processor clocks.When reading CAN registers,noother CAN accesses can occur.This requires protecting the non-interrupt code from interrupt handlerscorrupting the read operations.This precaution is not required for writes,as the default interruptlatency is higher than the delay necessary at50MHz.To write a CAN register,use the following simple sequence:1.Write the CAN register.2.Delay for(processor clock/CAN clock)processor cycles.To read a CAN register,use the following simple sequence:1.Acquire CAN mutex(mutual exclusion).August04,2011/Rev.3.0Texas Instruments11Stellaris LM3S2948A2Errata2.Read the CAN register and discard the data.3.Delay for(processor clock/CAN clock)processor cycles.4.Read the CAN register again to get the correct data.5.Release CAN mutex.The mutex used to protect CAN access can be done more than one way.One method is to simplydisable interrupts for the CAN controller that is being accessed during read accesses.Whatevermethod is used,it must be sure to protect against any asynchronous code that accesses the sameCAN controller as the code that it interrupts.Silicon Revision Affected:A2Copyright©2007-2011Texas Instruments Incorporated All rights reserved.Stellaris and StellarisWare are registered trademarks of Texas Instruments Incorporated.ARM and Thumb are registered trademarks and Cortex is a trademark of ARM Limited.Other names and brands may be claimed as the property of others.Texas Instruments Incorporated108Wild Basin,Suite350Austin,TX78746/stellaris/sc/technical-support/product-information-centers.htmAugust04,2011/Rev.3.0 12Texas InstrumentsIMPORTANT NOTICETexas Instruments Incorporated and its subsidiaries(TI)reserve the right to make corrections,modifications,enhancements,improvements, and other changes to its products and services at any time and to discontinue any product or service without notice.Customers should obtain the latest relevant information before placing orders and should verify that such information is current and complete.All products are sold subject to TI’s terms and conditions of sale supplied at the time of order acknowledgment.TI warrants performance of its hardware products to the specifications applicable at the time of sale in accordance with TI’s standard warranty.Testing and other quality control techniques are used to the extent TI deems necessary to support this warranty.Except where mandated by government requirements,testing of all parameters of each product is not necessarily performed.TI assumes no liability for applications assistance or customer product design.Customers are responsible for their products and applications using TI components.To minimize the risks associated with customer products and applications,customers should provide adequate design and operating safeguards.TI does not warrant or represent that any license,either express or implied,is granted under any TI patent right,copyright,mask work right, or other TI intellectual property right relating to any combination,machine,or process in which TI products or services are rmation published by TI regarding third-party products or services does not constitute a license from TI to use such products or services or a warranty or endorsement e of such information may require a license from a third party under the patents or other intellectual property of the third party,or a license from TI under the patents or other intellectual property of TI.Reproduction of TI information in TI data books or data sheets is permissible only if reproduction is without alteration and is accompanied by all associated warranties,conditions,limitations,and notices.Reproduction of this information with alteration is an unfair and deceptive business practice.TI is not responsible or liable for such altered rmation of third parties may be subject to additional restrictions.Resale of TI products or services with statements different from or beyond the parameters stated by TI for that product or service voids all express and any implied warranties for the associated TI product or service and is an unfair and deceptive business practice.TI is not responsible or liable for any such statements.TI products are not authorized for use in safety-critical applications(such as life support)where a failure of the TI product would reasonably be expected to cause severe personal injury or death,unless officers of the parties have executed an agreement specifically governing such use.Buyers represent that they have all necessary expertise in the safety and regulatory ramifications of their applications,and acknowledge and agree that they are solely responsible for all legal,regulatory and safety-related requirements concerning their products and any use of TI products in such safety-critical applications,notwithstanding any applications-related information or support that may be provided by TI.Further,Buyers must fully indemnify TI and its representatives against any damages arising out of the use of TI products in such safety-critical applications.TI products are neither designed nor intended for use in military/aerospace applications or environments unless the TI products are specifically designated by TI as military-grade or"enhanced plastic."Only products designated by TI as military-grade meet military specifications.Buyers acknowledge and agree that any such use of TI products which TI has not designated as military-grade is solely at the Buyer's risk,and that they are solely responsible for compliance with all legal and regulatory requirements in connection with such use. TI products are neither designed nor intended for use in automotive applications or environments unless the specific TI products are designated by TI as compliant with ISO/TS16949requirements.Buyers acknowledge and agree that,if they use any non-designated products in automotive applications,TI will not be responsible for any failure to meet such requirements.Following are URLs where you can obtain information on other Texas Instruments products and application solutions:Products ApplicationsAudio /audio Communications and Telecom /communicationsAmplifiers Computers and Peripherals /computersData Converters Consumer Electronics /consumer-appsDLP®Products Energy and Lighting /energyDSP Industrial /industrialClocks and Timers /clocks Medical /medicalInterface Security /securityLogic Space,Avionics and Defense /space-avionics-defense Power Mgmt Transportation and Automotive /automotiveMicrocontrollers Video and Imaging /videoRFID OMAP Mobile Processors /omapWireless Connctivity /wirelessconnectivityTI E2E Community Home Page Mailing Address:Texas Instruments,Post Office Box655303,Dallas,Texas75265Copyright©2011,Texas Instruments Incorporated。