红外触发捕鼠器模型
红外线激光打老鼠的原理
红外线激光打老鼠的原理
红外线激光打老鼠的原理是利用激光器发射紫外线激光束,通过红外线感应器检测老鼠的位置,一旦老鼠被激光束扫过,红外线感应器会立即向激光器发出信号,触发激光器发出连续的高频率激光束,直接照射老鼠,从而达到打击老鼠的目的。
由于红外线激光打老鼠的速度非常快,并且可以多方位扫描,所以非常适合用于快速捕捉和打击老鼠。
同时,红外线激光器的功率可调,可以根据老鼠的大小和数量来设置,既节省能源,又可以增加激光束的命中率,提高捕鼠效率。
【CN209846046U】红外线感应捕鼠器【专利】
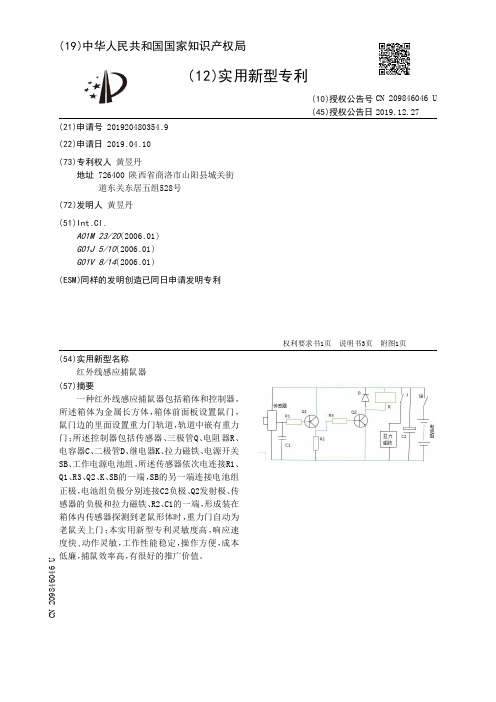
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201920480354.9(22)申请日 2019.04.10(73)专利权人 黄昱丹地址 726400 陕西省商洛市山阳县城关街道东关东居五组528号(72)发明人 黄昱丹 (51)Int.Cl.A01M 23/20(2006.01)G01J 5/10(2006.01)G01V 8/14(2006.01)(ESM)同样的发明创造已同日申请发明专利(54)实用新型名称红外线感应捕鼠器(57)摘要一种红外线感应捕鼠器包括箱体和控制器,所述箱体为金属长方体,箱体前面板设置鼠门,鼠门边的里面设置重力门轨道,轨道中嵌有重力门;所述控制器包括传感器、三极管Q、电阻器R、电容器C、二极管D、继电器K、拉力磁铁、电源开关SB、工作电源电池组,所述传感器依次电连接R1、Q1、R3、Q2、K、SB的一端,SB的另一端连接电池组正极,电池组负极分别连接C2负极、Q2发射极、传感器的负极和拉力磁铁、R2、C1的一端,形成装在箱体内传感器探测到老鼠形体时,重力门自动为老鼠关上门;本实用新型专利灵敏度高,响应速度快,动作灵敏,工作性能稳定,操作方便,成本低廉,捕鼠效率高,有很好的推广价值。
权利要求书1页 说明书3页 附图1页CN 209846046 U 2019.12.27C N 209846046U权 利 要 求 书1/1页CN 209846046 U1.一种红外线感应捕鼠器,包括箱体和控制器,其特征在于:所述箱体为金属长方体,箱体的前面板设置鼠门,鼠门边的里面设置重力门轨道,轨道中嵌有重力门;所述控制器包括传感器、三极管Q、电阻器R、电容器C、二极管D、继电器K、拉力磁铁、电源开关SB、工作电源电池组;所述三极管Q包括Q1Q2,电阻器R包括R1R2R3,电容器C包括C1C2,所述传感器依次电连接R1、Q1、R3、Q2、K、SB的一端,SB的另一端连接电池组正极,电池组负极分别连接C2负极、Q2发射极、传感器的负极和拉力磁铁、R2、C1的一端,拉力磁铁的另一端连接K的常开端J,K的常开端J另一端连接电源正极,R2的另一端连接Q1发射极,C1的另一端连接传感器的输出端,传感器的正端和Q1的集电极、D负极、C2正极分别与电池组正极连接、D的正极连接Q2的集电极。
【CN209677187U】一种红外线捕鼠装置【专利】
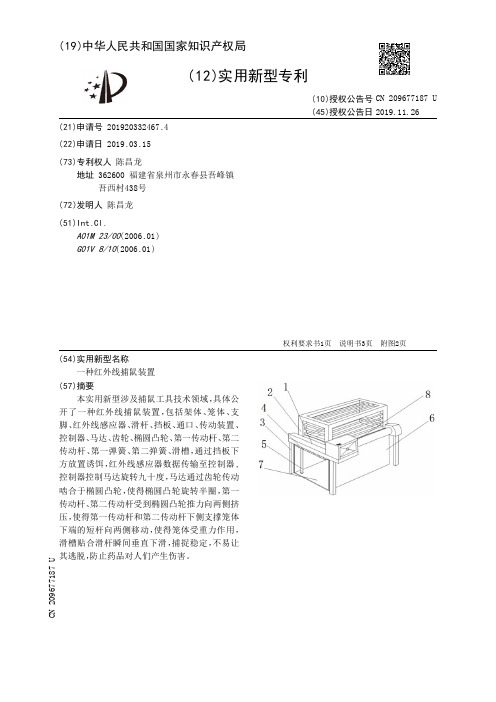
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201920332467.4(22)申请日 2019.03.15(73)专利权人 陈昌龙地址 362600 福建省泉州市永春县吾峰镇吾西村438号(72)发明人 陈昌龙 (51)Int.Cl.A01M 23/00(2006.01)G01V 8/10(2006.01)(54)实用新型名称一种红外线捕鼠装置(57)摘要本实用新型涉及捕鼠工具技术领域,具体公开了一种红外线捕鼠装置,包括架体、笼体、支脚、红外线感应器、滑杆、挡板、通口、传动装置、控制器、马达、齿轮、椭圆凸轮、第一传动杆、第二传动杆、第一弹簧、第二弹簧、滑槽,通过挡板下方放置诱饵,红外线感应器数据传输至控制器,控制器控制马达旋转九十度,马达通过齿轮传动啮合于椭圆凸轮,使得椭圆凸轮旋转半圈,第一传动杆、第二传动杆受到椭圆凸轮推力向两侧挤压,使得第一传动杆和第二传动杆下侧支撑笼体下端的短杆向两侧移动,使得笼体受重力作用,滑槽贴合滑杆瞬间垂直下滑,捕捉稳定,不易让其逃脱,防止药品对人们产生伤害。
权利要求书1页 说明书3页 附图2页CN 209677187 U 2019.11.26C N 209677187U权 利 要 求 书1/1页CN 209677187 U1.一种红外线捕鼠装置,其特征在于:其结构包括架体(1)、笼体(2)、支脚(3)、红外线感应器(4)、滑杆(5)、挡板(6)、通口(7)、传动装置(8),所述笼体(2)设于架体(1)的上方,所述支脚(3)顶端与架体(1)底端向焊接,所述红外线感应器(4)安装于架体(1)底端两侧,所述滑杆(5)底端焊接于挡板(6)底面,所述通口(7)设于挡板(6)内侧,所述传动装置(8)设于支脚(3)上方,传动装置(8)包括控制器(81)、马达(82)、齿轮(83)、椭圆凸轮(84)、第一传动杆(85)、第二传动杆(852)、第一弹簧(86)、第二弹簧(862)、滑槽(87),所述控制器(81)与马达(82)电连接,所述马达(82)转轴上安装有齿轮(83),所述齿轮(83)与椭圆凸轮(84)啮合传动,所述第一传动杆(85)设于椭圆凸轮(84)左侧,所述第二传动杆(852)设于椭圆凸轮(84)右侧,所述第一传动杆(85)左端焊接有第一弹簧(86),所述第二传动杆(852)右端焊接有第二弹簧(862),所述笼体(2)内侧设有滑槽(87),所述第一传动杆(85)和第二传动杆(852)下侧均设有贴于笼体(2)下端的短杆。
红外电子灭鼠器电路
红外电子灭鼠器电路引言在人们的生活中,家庭卫生一直是一个无法回避的问题。
在一个家庭里,老鼠是人们最不希望看到的客人。
传统的灭鼠方式主要是使用老鼠药和老鼠夹,但这些方法不仅有一定的安全隐患,而且容易污染环境。
近年来,随着技术的不断进步,越来越多的科技手段被运用于家庭卫生中,成为人们灭鼠的新选择。
其中,红外电子灭鼠器就是一种较为常见的方式,本篇文章将介绍与红外电子灭鼠器有关的电路设计。
红外电子灭鼠器的工作原理红外电子灭鼠器是一种无声、无害、环保的灭鼠方式。
它的工作原理是利用红外线的波长和频率与老鼠的神经系统相吻合,对老鼠进行驱赶,最终达到目的。
其主要构成部分为电源、正弦波发生器、红外发射器、音频功放和喇叭。
红外电子灭鼠器的电路设计电源电路红外电子灭鼠器的电源电路可以使用常见的5V直流电源模块,如国产AMS1117系列模块等,或者使用常见的电池供电,如干电池、锂电池等。
正弦波发生器电路红外电子灭鼠器的正弦波发生器电路可以使用集成电路LM741或LM358来实现。
正弦波输出的频率一般为20KHz。
红外发射器电路红外发射器电路是红外电子灭鼠器中的关键部分,可以使用集成电路AT89C2051来实现。
AT89C2051是一款高性能的单片机,具有可编程的IO口和1K字节的可编程闪存。
该电路中的红外发射器主要负责向老鼠发射驱鼠信号,其频率和时间可以设置。
音频功放电路红外电子灭鼠器的音频功放电路可以使用TDA2003芯片来实现。
TDA2003是一款低成本的音频功放芯片,输出功率可达12W。
该电路中的功放主要负责将正弦波发生器产生的20KHz信号转化为可听的声音。
喇叭红外电子灭鼠器中的喇叭可以使用常见的移动电话或电脑喇叭来实现。
为了达到更好的效果,建议使用质量较好的喇叭。
总结红外电子灭鼠器是一种无声、无害、环保的灭鼠方式,其工作原理是利用红外线的波长和频率与老鼠的神经系统相吻合,对老鼠进行驱赶。
本篇文章介绍了相关的电路设计,并对其主要构成部分进行了详细解析。
无声捕鼠器方案
无声捕鼠器方案前言随着城市化的进展和生活水平的提高,老鼠成了城市居民的常见困扰之一。
传统的捕鼠器通常会发出刺耳的声音,不仅影响到居民的睡眠和生活,还有可能引起儿童和宠物的恐慌。
为了实现无声捕鼠,本文将介绍一种新型的无声捕鼠器方案。
方案概述本方案基于红外线传感技术和电子加速器技术,通过人工智能算法实现无声捕鼠。
其主要步骤包括红外线探测、目标识别和电子加速器驱动。
硬件准备实施本方案所需的硬件设备包括:1.红外线传感器:用于检测环境中的鼠类活动。
2.摄像头:用于捕捉图像以进行图像识别。
3.电子加速器:用于迅速驱动捕鼠器实施捕捉。
4.控制单元:用于连接和控制硬件设备,可以选择树莓派或其他类似的单板计算机。
5.电源适配器:用于为硬件设备供电。
方案实施步骤步骤一:红外线探测使用红外线传感器监测环境中的鼠类活动。
红外线传感器可以通过检测鼠类活动时发出的红外线信号来识别鼠类的存在。
步骤二:目标识别当红外线传感器检测到鼠类活动时,通过摄像头捕捉图像。
然后通过图像识别算法对图像进行处理,识别出鼠类的位置信息。
步骤三:电子加速器驱动一旦确认了鼠类的位置,就可以通过电子加速器来驱动捕鼠器。
电子加速器可以在瞬间施加力量,将捕鼠器迅速封闭,实现捕捉鼠类的目的。
步骤四:报警通知当捕鼠器成功捕到鼠类时,系统会发送通知,可以通过手机应用程序或其他通信方式通知用户。
优势与应用场景优势•无声捕鼠:使用本方案实现的无声捕鼠器不会发出刺耳的声音,不会打扰居民的日常生活。
•高效率:采用红外线传感技术和电子加速器技术,实现对鼠类的快速识别和捕捉,提高了捕捉效率。
•智能化:通过人工智能算法实现对鼠类的识别和定位,系统可以自动进行操作,减少人工干预。
应用场景•家庭使用:适用于家庭、公寓等环境中的老鼠防治。
•商业场所:适用于餐饮店、超市、仓库等商业场所的老鼠防治。
•公共设施:适用于学校、办公楼、医院等公共设施的老鼠防治。
结语本文介绍了一种新型的无声捕鼠器方案,通过红外线传感技术和电子加速器技术实现对鼠类的识别和捕捉。
捕鼠器方案
以我给的标题写文档,最低1503字,要求以Markdown 文本格式输出,不要带图片,标题为:捕鼠器方案# 捕鼠器方案## 1. 引言在人类社会中,老鼠被视为害虫之一。
它们在人类居住的环境中寻找食物和栖息地,给人们的生活带来了许多问题。
为了解决老鼠问题,人们发明了各种各样的捕鼠器。
本文将介绍一种高效、低成本的捕鼠器方案。
## 2. 方案概述本方案基于电子捕鼠器的原理,通过通过引诱老鼠进入并触发捕鼠器,将老鼠困住并防止其逃脱。
我们将使用Arduino开发平台和一些简单的电子元件来制作捕鼠器。
## 3. 材料清单以下是制作捕鼠器所需的材料清单:- Arduino开发板- 继电器模块- 温湿度传感器模块- 红外传感器模块- 电源模块- 面包板连接线- 木箱或塑料容器- 金属网请确保以上材料都齐全,并准备好开始制作捕鼠器。
## 4. 步骤### 4.1 准备捕鼠器首先,我们需要准备一个木箱或塑料容器,作为捕鼠器的外壳。
确保容器大小适中,以容纳捕鼠器的电子元件和老鼠。
在容器的一侧切割一个小孔,以便老鼠可以进入。
确保孔的大小足够放入老鼠,但不要太大,以免老鼠逃脱。
### 4.2 搭建电路将Arduino开发板连接到继电器模块、温湿度传感器模块和红外传感器模块。
使用面包板连接线将它们连接在一起,确保电路连接正确且稳定。
### 4.3 编写程序使用Arduino开发环境编写程序。
程序的主要功能是监测温度、湿度和红外传感器是否检测到老鼠。
当温湿度传感器检测到异常的温度和湿度,并且红外传感器检测到老鼠通过时,触发继电器使捕鼠器关闭。
程序示例:```arduino#include <DHT.h>const int pirPin = 2;const int relayPin = 3;const int DHTPin = 4;DHT dht(DHTPin, DHT11);void setup() {pinMode(pirPin, INPUT);pinMode(relayPin, OUTPUT);Serial.begin(9600);dht.begin();}void loop() {int pirState = digitalRead(pirPin);float temperature = dht.readTemperature();float humidity = dht.readHumidity();if(pirState == HIGH && temperature > 30 && humidity > 60) { digitalWrite(relayPin, HIGH);delay(3000);digitalWrite(relayPin, LOW);}delay(1000);Serial.print(\。