实验七:基于51单片机的μCOS-II系统的静态库生成-步骤
动态库和静态库的制作过程
动态库和静态库的制作过程我们通常把一些公用函数制作成函数库,供其它程序使用。
函数库分为静态库和动态库两种。
静态库在程序编译时会被连接到目标代码中,程序运行时将不再需要该静态库。
动态库在程序编译时并不会被连接到目标代码中,而是在程序运行是才被载入,因此在程序运行时还需要动态库存在。
本文主要通过举例来说明在Linux中如何创建静态库和动态库,以及使用它们。
在创建函数库前,我们先来准备举例用的源程序,并将函数库的源程序编译成.o文件。
第1步:编辑得到举例的程序--hello.h、hello.c和main.c;hello.c(见程序2)是函数库的源程序,其中包含公用函数hello,该函数将在屏幕上输出"Hello XXX!"。
hello.h(见程序1)为该函数库的头文件。
main.c(见程序3)为测试库文件的主程序,在主程序中调用了公用函数hello。
#ifndef HELLO_H#define HELLO_Hvoid hello(const char *name);#endif //HELLO_H程序1: hello.h#include <stdio.h>void hello(const char *name){printf("Hello %s!\n", name);}程序2: hello.c#include "hello.h"int main(){hello("everyone");return 0;}程序3: main.c第2步:将hello.c编译成.o文件;无论静态库,还是动态库,都是由.o文件创建的。
因此,我们必须将源程序hello.c通过gcc先编译成.o文件。
在系统提示符下键入以下命令得到hello.o文件。
# gcc -c hello.c#(注1:本文不介绍各命令使用和其参数功能,若希望详细了解它们,请参考其他文档。
51单片机开发流程入门(经典版)

绿豆芽科技工作室
KEIL 为什么要破解:KEIL 没有破解的时候,允许程序代码长度限制在 32K, 注册完之后,就没有限制了。刚开始写小程序是没有影响的,如果后面写相 对来说比较长的程序,就会有影响,无法编译。 (2) 安装驱动(具体方法请见文档“驱动的安装” ) 【常见问题】 驱动的安装看人品,有的同学可能会一次性安装好,有的同学同学可能就悲 剧了,需要经历不断的重装,重启……Win8 系统多试几次 怎么判断驱动是否安装好了呢? 方法 1:右击“计算机” (XP 系统为“我的电脑” ) ,选择设备管理器中的“端 口(COM 和 LPT) ”,如果前面没有问号或者黄色的叹号,表示安装好了。
会看到下面的软件界面:按图中的说明操作即可
绿豆芽科技工作室
【常见问题】 下载时有很多同学没有成功,常见的问题有以下几种: (1) 型号没选对, 尤其 51 和 52 要看清。 如果型号选择错误, 会出现如下错误:
(2) 单片机不要插反,单片机的缺口朝上。如果插反的话,单片机会发烫!如 果感觉到芯片发烫,请马上把开关断开!
出现下面错误:
绿豆芽科技工作室
原因是语句 sbit led=p1^0;中‘p’小写了,应该为大写。
第三步:下载
两种下载方式:USB 下载和串口下载(我们一般用 USB 下载方式) (1) 用 USB 下载时, 只需用一根双公 USB 线将开发板与电脑连接即可, 此时 USB 有两个作用,下载+供电。 (2)用 USB 转串口线下载时,首先用 USB 线将 5V 电源与开发板连接,然后用 USB 转串口线连接电脑和开发板,USB 线供电,串口线下载。 双击 STC-ISP 图标
方法 2:打开下载软件 STC-ISP,如果串口号处出现下图所示的信息,表示安装 好了。
μCOS-II-下-LwIP-协议栈的移植和测试
1、引言为了实现嵌入式系统终端连入互联网,而有必要为其引入了网络功能。
μC/OS II 是一个源代码开放的实时操作系统,但是它只是一个实时的任务调度及通信内核,并没有集成TCP/IP 通信协议,为了实现网络功能,需要在μC/OS II 移植一个轻量级的TCP/IP 通信协议LwIP。
本文主要论述μC/OS II 下通信协议LwIP 的移植以及测试。
2、LwIP 简介LwIP ( light weight IP)是瑞士计算机科学院的Adam Dunkels 等开发的一套开放TCP/IP 协议栈源代码。
LwIP 既可以移植到操作系统上,又可以在无操作系统的情况下独立运行。
LwIP 实现的重点是在保持TCP/IP 协议主要功能的基础上减少对RAM 的占用,这使LwIP 适合在低端嵌入式系统中使用。
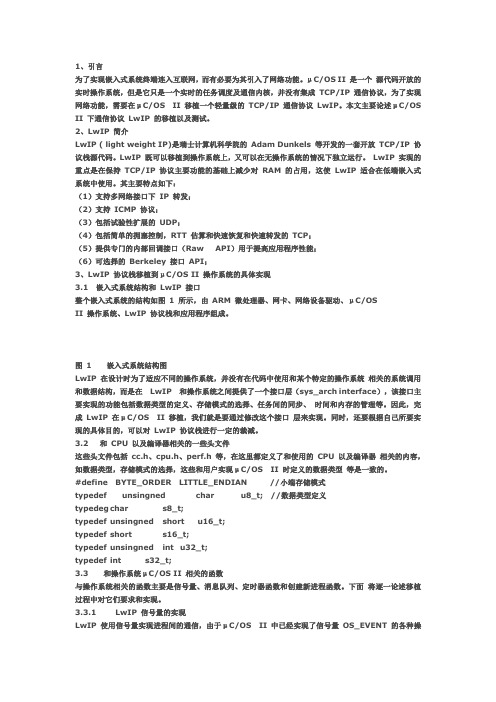
其主要特点如下:(1)支持多网络接口下IP 转发;(2)支持ICMP 协议;(3)包括试验性扩展的UDP;(4)包括简单的拥塞控制,RTT 估算和快速恢复和快速转发的TCP;(5)提供专门的内部回调接口(Raw API)用于提高应用程序性能;(6)可选择的Berkeley 接口API;3、LwIP 协议栈移植到μC/OS II 操作系统的具体实现3.1 嵌入式系统结构和LwIP 接口整个嵌入式系统的结构如图 1 所示,由ARM 微处理器、网卡、网络设备驱动、μC/OSII 操作系统、LwIP 协议栈和应用程序组成。
图 1 嵌入式系统结构图LwIP 在设计时为了适应不同的操作系统,并没有在代码中使用和某个特定的操作系统相关的系统调用和数据结构,而是在LwIP 和操作系统之间提供了一个接口层(sys_arch interface),该接口主要实现的功能包括数据类型的定义、存储模式的选择、任务间的同步、时间和内存的管理等。
因此,完成LwIP 在μC/OS II 移植,我们就是要通过修改这个接口层来实现。
同时,还要根据自己所要实现的具体目的,可以对LwIP 协议栈进行一定的裁减。
嵌入式μCOS-II内核实验四(哲学家就餐问题的实现)

目录
• 引言 • 哲学家就餐问题概述 • μcos-ii内核任务管理 • 哲学家就餐问题的μcos-ii实现 • 实验结果与分析 • 总结与展望
01
引言
嵌入式系统与μcos-ii内核简介
嵌入式系统
是一种专用的计算机系统,主要用于控制、监视或帮助操作 机器设备。它通常具有实时性、可靠性和低功耗等特点,广 泛应用于工业控制、智能家居、医疗设备等领域。
任务优先级与调度
任务优先级
在μcos-ii内核中,每个任务都有自己 的优先级。优先级高的任务会优先获 得CPU的使用权。
任务调度
μcos-ii内核使用基于优先级的抢占式任务 调度算法。当一个高优先级的任务就绪时, 内核会立即抢占当前正在运行的任务,并切 换到高优先级的任务上运行。
任务同步与通信
任务同步
解决方案的分类与比较
解决方案分类
解决哲学家就餐问题的方案可以分为两类:静态方案和动态方案。静态方案在 系统启动时分配固定的资源,而动态方案则在运行时动态地分配资源。
解决方案比较
静态方案实现简单,但可能导致死锁或饥饿问题。动态方案可以更好地解决这 些问题,但实现起来较为复杂,需要更多的系统资源和时间。在实际应用中, 需要根据具体需求和系统限制选择合适的解决方案。
05
实验结果与分析
实验环境与配置
01
硬件平台
ARM Cortex-M4微控制器 (具体型号为
STM32F407ZGT6)
02
开发环境
Keil uVision5
03
04
实验任务
实现基于μcos-ii内核的多任务 切换
配置参数
任务优先级、任务堆栈大小、 任务状态等
基于COS-II
基于μC/OS-II的无线监控终端设计与实现梅运华 李杨 宋成艳 赵后才(广东工业大学信息工程学院 广州 510006)摘要: 本终端利用ARM单片机控制GSM模块,依托GSM网络,采集远程设备运行数据,响应监控中心的一系列遥控命令。
文中介绍了该终端软硬件的设计与实现,给出了一种使用μC/OS-II实现多任务操作的方法。
该无线终端具有实时性强、传输信息量大、稳定可靠等特点,可以广泛应用于工业监控、远程遥测等系统中。
关键词:终端 ; GSM模块 ;μC/OS-II ; 操作系统 ;任务中图分类号:TP368 文献标识码:ADesign and Implement of the Wireless Surveillance Terminal Unit Based onμC/OS-IIMei Yun-hua Li Yang Song Cheng-yan Zhao Hou-cai(Guang Dong University of technology,School of Information Engineering,Guang Zhou,China,510006)Abstract: ARM MCU is used to control the GSM module in the terminal. This wireless terminal adopt GSM for remote data transferring in the GSM network.The terminal will collect the running data of the remote equipment and response to a serial of the master station’s telemetering commands.The paper introduce the design and the implement of this terminal ,provide a method of multitasking with μC/OS-II. This wireless terminal has many specialties such as good real-time,huge transmitting information ,stabilization,reliability etc. It can be widely used in industry watch-control,remote control systems etc.Keywords:terminal ; GSM module ; µC/OS-II ;operating system ; task0.引言目前,单片机和PC机通过串行接口构成的多微机系统已经广泛应用于工业控制、环境监测等场合,这些系统大多是采用RS-232、RS-485或有线modem的通信方式,虽然经济实用,但是这些有线数据传输方式在很大程度上限制了其使用场合。
μCOS-II微小内核分析
概述| μC/OS-II微小内核分析
3、配置文件
μC/OS-II微小内核简介
配置文件是每个μC/OS-II程序必备的文件,而且不同的程序 一般不一样,但大小基本上相同。配置文件范例位于H目录下, 分别为INCLUDES.H和OS_CFG.H文件。
(1) INCLUDES.H:内核需要的头文件,对于特定的移植,一般 不需要改变; (2)OS_CFG.H:内核配置的头文件,一般需要根据程序的需求 修改其常量的内容。
OS_ENTER_CRITICAL()和OS_EXIT_CRITICAL() 所属文件 移植代码 函数名称 OSTimeTick OSIntEnter 所属文件 OS_CORE.C OSTaskCreate OSSemCreate OSIntExit OSTaskDel OSStart OS_TASK.C 函数名称 OSSemDel 函数名称 OSSemPend OS_TIME.C OSInit OS_CORE.C OS_SEM.C 所属文件 OS_SEM.C 函数名称 OSSemPost 函数名称 OSTimeDly 由移植代码决定 (INT8U prio) 函数原型 void OSTimeTick(void) void OSIntExit(void) OS_EVENT *OSSemCreate (INT16U *pd), INT8U opt, INT8U *err) INT8U *OSSemDel OSStart(void) 函数原型 OS_EVENTOSTaskDel (void (*task)(voidINT16U timeout, INT8U *err) 函数原型 void OSSemPend (INT16U ticks) *pevent) OSTimeDly (OS_EVENT *pevent, cnt) void OSTaskCreate OSInit(void) 函数原型 INT8U OSSemPost (void)(OS_EVENT *pevent,void *pdata, OS_STK *ptos, INT8U prio) 函数原型 INT8U OSIntEnter (OS_EVENT 一般来说,OS_ENTER_CRITICAL()和OS_EXIT_CRITICAL()为定义的宏,用来 通知μC/OS-Ⅱ一个中断服务已开始执行,这有助于μC/OS-Ⅱ掌握中断嵌套的情 功能描述 删除信号量:在删除信号量之前,应当删除可能会使用这个信号量的任务 在每次时钟节拍中断服务程序中被调用,无函数参数和返回值。OSTimeTick()检查 建立并初始化一个信号量 通知μC/OS-Ⅱ一个中断服务已执行完毕,这有助于μC/OS-Ⅱ掌握中断嵌套的情 启动μC/OS-II的多任务环境,无函数参数和返回值 功能描述 发送信号量:如果指定的信号量是零或大于零,OSSemPost()函数递增该信号量 建立一个新任务。既可以在多任务环境启动之前,也可以在正在运行的任务中创建 删除一个指定优先级的任务。被删除的任务将回到休眠状态,任务被删除后可 初始化μC/OS-Ⅱ,无函数参数和返回值 功能描述 将一个任务延时若干个时钟节拍,无函数返回值。延时时间的长度可从0到65535个 功能描述 等待信号量:当任务调用OSSemPend()函数时,如果信号量的值大于零,那么 功能描述 功能描述 禁止、打开CPU的中断,无函数参数和返回值 况。通常OSIntExit()和OSIntEnter()联合使用,无函数参数和返回值 处于延时状态的任务是否达到延时时间,或正在等待事件的任务是否超时 任务 况。通常OSIntExit()和OSIntEnter()联合使用。当最后一层嵌套的中断执行完毕 以用函数OSTaskCreate()重新建立 时钟节拍,延时时间0表示不进行延时,函数将立即返回调用者,延时的具体时间 并返回。如果有任务在等待信号量,则最高优先级的任务将得到信号量并进入就绪 功能描述 pevent :指向信号量的指针,OSSemCreate()的返回值 cnt :建立的信号量的初始值,可以取0到65535之间的任何值 在调用OSStart( )之前必须先调用OSInit ( )。在用户程序中OSStart( )只能被调用 函数参数 OSSemPend()函数对该值减一并返回:如果调用时信号量等于零,那么OSSemPend() 必须在调用OSStart()函数之前调用OSInit(),而只有在调用OSStart()函数之后, 功能描述 特殊说明 函数将任务加入该信号量的等待列表,任务将等待直到获得信号量或超时 后,如果有更高优先级的任务准备就绪,μC/OS-Ⅱ会调用任务调度函数,在这 功能描述 opt OS_ENTER_CRITICAL()和OS_EXIT_CRITICAL()必须成对使用 依赖于系统每秒钟有多少时钟节拍(由文件OS_CFG..H中的常量 状态。然后进行任务调度,决定当前运行的任务是否仍然为处于最高优先级的就绪 特殊说明 OSTimeTick()的运行时间和系统中的任务数直接相关,在任务或中断中都可以调用。 在中断服务程序中,如果保证直接递增OSIntNesting“原子操作”,中断服务 prio :指定要删除任务的优先级,如果为OS_PRIO_SELF则删除自身 一次,第二次调用OSStart( )将不执行任何操作 :指向任务代码的指针(函数指针) 函数参数 task:定义信号量删除条件 μC/OS-Ⅱ才真正开始运行多任务 正常 : 态的任务 指向分配给所建立的信号量的事件控制块的指针 OS_TICKS_PER_SEC设定) 种情况下,中断返回到更高优先级的任务而不是被中断了的任务。无函数参数 函数参数 -OS_DEL_NO_PEND:没有任何任务等待信号量才删除 特殊说明 如果在任务中调用,任务的优先级应该很高(优先级数字很小),这是因为 函数返回值 pevent:传递给任务的参数(一个变量指针) 程序使用直接递增OSIntNesting的方法而不调用OSIntEnter()函数。 pdata :指向信号量的指针,OSSemCreate()的返回值 OS_NO_ERR:函数调用成功 和返回值 NULL :没有可用的事件控制块 特殊说明 pevent :指向信号量的指针,OSSemCreate()的返回值 函数参数 -OS_DEL_ALWAYS:立即删除 函数参数 timeout:最多等待的时间(超时时间),以时钟节拍为单位 OSTimeTick()负责所有任务的延时操作 ticks:要延时的时钟节拍数 函数参数 ptos :指向任务堆栈栈顶的指针 何为原子操作?在一个任务的执行过程中,如果有某些操作不希望在执行 OS_TASK_DEL_IDLE:错误,试图删除空闲任务(Idle task) :用于返回错误码 特殊说明 err 在任务级不能调用该函数。即使中断服务程序使用直接递增OSIntNesting的 OS_NO_ERR :发送信号量成功 延时时间0表示不进行延时操作,而立即返回调用者。为了确保设定的延时时间, err 必须先建立信号量,然后使用 过程中被别的任务或中断打断,那么这些不希望被打断的操作就是原子操作 :任务的优先级 特殊说明 prio :用于返回错误码 OS_TASK_DEL_ ERR:错误,指定要删除的任务不存在 函数返回值 方法(没有调用OSIntEnter()),也必须调用OSIntExit()函数 特殊说明 *err可能为以下值: 建议用户设定的时钟节拍数加1。例如,希望延时10个时钟节拍,可设定参数为11 OS_SEM_OVF :信号量的值溢出 函数返回 OS_NO_ERR :成功删除信号量 *err可能为以下值: OS_NO_ERR:函数调用成功 OS_PRIO_INVALID:参数指定的优先级大于OS_LOWEST_PRIO 值 OS_ERR_EVENT_TYPE :pevent 不是指向信号量的指针 OS_PRIO_EXIST:具有该优先级的任务已经存在 OS_TASK_DEL_ISR:错误,试图在中断处理程序中删除任务 函数返回 OS_ERR_DEL_ISR :在中断中删除信号量所引起的错误 函数返回 OS_NO_ERR :调用成功,得到信号量 OS_ERR_INVALID_OPT :错误,opt值非法 OS_ERR_PEVENT_NULL :错误,pevent为NULL OS_TIMEOUT :超过等待时间 值 值 OS_PRIO_INVALID:参数指定的优先级大于OS_LOWEST_PRIO 函数返回 OS_ERR_TASK_WAITING :有一个或多个任务在等待信号量 值 必须先建立信号量,然后使用 特殊说明 OS_ERR_EVENT_TYPE :错误,pevent不是指向信号量的指针 OS_ERR_PEND_ISR :在中断中调用该函数所引起的错误 OS_NO_MORE_TCB:系统中没有OS_TCB可以分配给任务了 OS_ERR_PEVENT_NULL :错误,pevent为NULL OS_ERR_EVENT_TYPE :错误,pevent 不是指向信号量的指针 任务堆栈必须声明为OS_STK类型。注意:在中断处理程序中不能建立任务。在任 (1)使用这个函数调用时,必须特别小心,因为其它任务可能还要用这个信号量 务中必须调用μC/OS提供的下述过程之一:延时等待、任务挂起、等待事件发生 特殊说明 OS_ERR_PEVENT_NULL :错误,pevent为NULL 特殊说明 (2)当挂起任务就绪时,中断关闭时间与挂起任务数目有关 (等待信号量,消息邮箱、消息队列),以便其它任务也能获得CPU的使用权 特殊说明 必须先建立信号量,然后使用,不允许在中断中调用该函数,因为中断不能被挂起
静态库的使用与创建

静态库的使用与创建静态库是一种预编译的库,它包含了一组已经编译好的目标文件(.o文件)。
使用静态库可以将一些常用的函数、类或其他代码打包成一个单独的文件,以便在多个应用程序中重复使用。
使用静态库:1. 创建静态库:首先需要将要打包的源代码编译成目标文件,然后使用静态库工具(如ar)将目标文件打包成静态库文件(.a文件)。
2. 链接静态库:在编译应用程序时,需要引用静态库文件,并将其链接到应用程序的可执行文件中。
可以使用编译器的命令行选项来指定链接静态库的路径和名称。
创建静态库的一般步骤如下:1. 编写源代码文件:创建需要打包进静态库的源代码文件(.c、.cpp、.h等)。
2. 编译源代码文件:使用编译器将源代码文件编译成目标文件(.o文件)。
例如,使用gcc编译C文件:`gcc -c file.c -o file.o`。
3. 打包目标文件:使用静态库工具(如ar)将目标文件打包成静态库文件。
例如,使用ar工具创建静态库:`ar rcs libfile.a file1.o file2.o ...`。
4. 链接静态库:在应用程序的编译过程中,使用编译器的命令行选项来链接静态库文件。
例如,使用gcc链接静态库:`gcc main.c -o main -L<path_to_lib> -lfile`。
注意事项:在创建静态库时,需要保持相应源代码文件的可移植性和独立性,以便在不同的项目中使用。
链接静态库时,需要确保目标文件和静态库文件的路径正确,并且编译器能够找到它们。
如果静态库依赖于其他库,需要确保这些依赖库也正确链接到应用程序中。
使用静态库可以提高代码的重用性和管理性,尤其是对于一些通用的函数或模块。
这种方法适用于部署到嵌入式设备、静态链接的可执行文件等场景。
嵌入式实时操作系统(μCOS-II)原理与应用-目录与正文-最新版第一部分

目录学习情境一、嵌入式系统概述及集成环境的搭建与使用 (1)一、知识要点:嵌入式系统概述 (1)1.嵌入式系统基本概念 (1)2.嵌入式系统的特点 (2)3.嵌入式系统的应用领域 (3)(1)工业控制领域 (3)(2)信息家电 (4)(3)交通管理、环境监测、医疗仪器 (4)(4)嵌入式Internet应用 (4)(5)军事国防领域 (5)4.嵌入式系统的发展 (6)5.嵌入式系统的开发流程 (7)6.嵌入式系统的调试 (10)(1)在线仿真器(ICE)方式 (10)(2)在线调试器(ICD)方式 (11)(3)监控器方式 (11)7.基于μCOS-Ⅱ的嵌入式系统软件体系结构 (11)二、技能要求:嵌入式系统交叉开发环境的搭建 (2)1.交叉开发环境 (2)2.使用集成开发环境进行软件开发的流程 (2)3.ARM ADS集成开发工具及其组成 (3)(1)ADS集成开发工具 (3)(2)ADS集成开发工具的组成 (3)案例1.ADS 1.2的安装 (4)案例2.ADS集成开发环境的使用 (5)(1)新建工程 (5)(2)配置新建工程 (6)(3)添加文件,完成编译与链接,并生成目标文件.......... 错误!未定义书签。
案例3.其它工具的使用 .............................................................................. 错误!未定义书签。
(1)仿真器的连接与使用................................ 错误!未定义书签。
(2)超级终端的设置及映像下载.......................... 错误!未定义书签。
(3)Source Insight代码编辑器的使用.................... 错误!未定义书签。
学习情境二、嵌入式平台的接口驱动................................................................... 错误!未定义书签。
uCOS-II在51单片机上的移植

功能
处理临界段方式选择 堆栈增长方向 进入临界区 退出临界区 就绪态最高优先级任务运行 任务级任务切换 中断级任务切换 时钟节拍 任务堆栈初始化
表7-1 需要修改的关键函数和宏定义
6
7.1.6 INCLUDES.H
* * * * * * 文件名 : INCLUDES.H * 作者 : Jean J. Labrosse ****************************************************************************/
9
7.1.8 OS_ENTER_CRITICAL()和OS_EXIT_CRITICAL()
临界代码的概念。 uC/OS-II定义的两个宏。
{ OS_ENTER_CRITICAL(); /* µC/OS-II 临界代码段 */ OS_EXIT_CRITICAL(); }
#define OS_ENTER_CRITICAL() EA=0 #define OS_EXIT_CRITICAL() EA=1 #define OS_ENTER_CRITICAL() \
例如,任务A和任务B都要调用函数Swap(), 而该函数又使用了全局变量temp。于是当任 务A调用Swap()函数期间,系统发生了任务 切换而使任务B也调用了Swap(),那么任务B 将要改变全局变量temp的值,使任务A传递 给全局变量temp的值丢失而出现错误。
一般来说,一个可重入函数应该在函数中只 使用局部变量,因为函数的局部变量存储在 任务的堆栈中,所以可保证不同的任务在调 用同一个函数时不会发生冲突。
/ ******************* 与处理器相关的代码 ********************/ #define OS_CRITICAL_METHOD ?? #if OS_CRITICAL_METHOD = = 1 #define OS_ENTER_CRITICAL() ?? #define OS_EXIT_CRITICAL() ?? #endif
毕业设计论文:基于51单片机的音乐发生器设计
本文是应用MCS-51单片机原理和控制理论技术设计音乐发生器的硬件电路,并利用C语言进行软件开发和程序设计。
通过控制单片机内部的定时器产生不同频率的方波,驱动喇叭发出不同音调的音乐,再利用延迟控制发音时间的长短。
把乐谱转化成相应的定时常数,从而达到从发音设备中演奏出悦耳动听的音乐的效果。
该音乐盒主要由按键电路、复位电路、时钟电路以及蜂鸣器组成。
使用两个按键控制音乐盒,一个用来切换歌曲,另一个用来切换8路LED的变化花样,本音乐盒共有两首歌曲,花样灯花样共计3种。
播放歌曲时,蜂鸣器发出某个音调,与之对应的LED亮起。
本设计利用KEIL编程软件对音乐盒源程序进行编程并调试,配合PROTEUS仿真软件对硬件进行仿真调试,节约了设计时间。
本系统采用C语言进行软件设计。
正文中首先简单描述系统硬件工作原理,且附以系统硬件设计框图,论述了本次毕业设计所应用的各硬件接口技术和各个接口模块的功能及工作过程。
其次阐述了程序的流程和实现过程。
本文撰写的主导思想是软、硬件相结合,以硬件为基础,来进行各功能模块的编写。
关键词单片机;音乐;C语言;STC89C51;KEIL;PROTEUSAbstractIn this paper, The music generator and its hardware circuit is designed by MCS-51 single-chip microcomputer principle and control theory, and the Software development and programming are based on C language programming. According to control the MCU internal timer to produce different frequency Square wave to drive the horn sounds of different tones of music, then use the delay to control the length of time. The music Transformationed into the timing constants corresponding so that the sound equipment can play Melodious music.The music box is mainly composed of keypad circuit, reset circuit, clock circuit and a buzzer. Two buttons are used to control the music box, one to switch songs, another is used to switch the 8 LED pattern, the music box has two songs, a total of 3 kinds of pattern light pattern. While the music is playing, the buzzer sounded a tone, and the corresponding LED lights up. The design of programming the music box and debug source code using KEIL programming software, and to save the design time the PROTEUS simulation software is used to simulate the hardware debugging.The system uses C language for software design. Firstly,in the text describes the working principle of the system hardware, and attached to the system block diagram of hardware design to discusse the function and working process of the graduation design and the application of the hardware interface technology and the interface module. Secondly, expound the procedures and processes to achieve process. The main idea of this writing is a combination of software and hardware, on the base of hardware, write to each function module.Key wordsSinglechip; music; C language; STC89C51; KEIL; PROTEUS目录前言.................................. 错误!未定义书签。
51例程编写学习过程
51单片机系统板例程学习编写过程7426笨蛋编序言兴趣是最好的老师,它可激发人的创造热情、好奇心和求知欲。
由百折不挠的信念所支持的人的意志,比那些似乎是无敌的物质力量有更强大的威力。
————爱因斯坦对电子由衷的喜欢是一直以来学习的动力,像很多爱好者一样自己对知识掌握到一定程度就迫不及待地想着给人分享自己的学习经验,因此本文档就产生了。
在如今,单片机已经遍布在我们生活每个角落,学习单片机的人越来越多,市场上的相关系统开发板也是遍地开花,随之而来的配套例程数不胜数。
为什么编者还是要在这里自己写例程呢?现在卖开发板的商家愈来愈多,形式也是多种多样,但其中配套例程大多数都是你抄抄我我抄抄你,造成范例程序参差不齐,有的根本不配所卖的板子,有的程序则是bug百出。
所以在这里,决定资料中的每一个程序都自己编写,这也算是把所学到的知识复习一遍,并且把其中的一些学习经验记录下来,希望能够带给大家一些帮助,能够让大家更好的理解程序吧。
由于本人水平有限,难免在文档或者例程中有错误,敬请大家批评指正。
7426笨蛋2014年8月目录一、LED闪烁灯(位操作)二、LED闪烁灯(查表法)三、按键控制LED四、LED点阵简单来回显示五、LED点阵静态显示字符六、LED点阵滚动显示字符七、按键控制点阵显示点、线八、按键控制点阵显示字符九、利用定时器制作60秒表十、蜂鸣器的驱动十一、产生不同频率驱动蜂鸣器十二、利用蜂鸣器唱歌十三、电动机的驱动十四、产生PWM驱动电动机十五、OLED屏驱动显示十六、AD转换显示十七、利用AD制作简易电压表十八、利用AD制作简易示波器十九、DS1302时钟模块制作时钟二十、按键控制OLED屏分级显示二十一、制作一个简单的综合控制显示系统一、LED闪烁灯(位操作)绝大多数初学者刚接触单片机所做的都是同一件事--点亮LED灯,无论是哪个教材都差不多。
因为学单片机,最简单就是的IO口控制高低电平,而led灯可以直观显示出IO 口的电平状态。
μCOS-II下通用驱动框架的设计与实现---UcOS-II
在卩C/OSII下,设计了一个通用的设备管理模型,称为通用驱动框架,通过该驱动框架,可以实现对硬件设备的统一、一致的管理,同时,也为上层应用程序提供了统一、一致的设备访问在卩C/OS-II下,设计了一个通用的设备管理模型,称为通用驱动框架,通过该驱动框架,可以实现对硬件设备的统一、一致的管理,同时,也为上层应用程序提供了统一、一致的设备访问接口,并在以ARM7TDMI-为核心的LPC2210微控制器开发板上给出了一例实现。
1 、概述在嵌入式应用系统中使用嵌入式操作系统可以提高应用系统的开发效率和提升嵌入式应用系统的稳定可靠性,因此,在嵌入式应用系统中使用嵌入式操作系统将成为嵌入式应用系统的设计主流⑴。
卩C/OSII是由美国学者Labrosse设计的一个优秀的嵌入式实时操作系统[2],它是一个源码公开、可移植、可固化、可裁剪、占先式的实时多任务操作系统,目前已经得到广泛应用。
卩C/OSII提供了操作系统必须具备的基本功能,包括:任务管理、信号量管理、邮箱管理、消息队列管理、事件管理、时间管理、内存管理,但它不提供设备管理和文件系统管理,已有研究者对卩C/OSII进行了文件子系统功能扩展⑻。
在实际应用中,对系统设备的有效管理也是一个非常重要的任务,因此,需要对卩C/OSII进行扩展,以实现这一功能。
本文为卩C/OSII设计了一个对系统设备进行统一管理的通用驱动框架,在此框架下,可以屏蔽系统硬件的差异,在无约束地发挥硬件能力的前提下,为上层应用提供了统一、一致的调用接口API ,从而实现了对系统设备的有效管理。
2、卩C/OSII下通用驱动框架的基本模型为了给上层应用提供统一、一致的系统设备调用接口,需要对上层应用程序对系统设备的访问操作进行抽象,在这方面,Unix 系统和Linux 系统做得比较成功[4][5]。
本文借鉴了Unix及Linux系统的成功经验,同时考虑到嵌入式操作系统的特殊性,为卩C/OSII 建立了如图1 所示的通用驱动框架模型。
μCOS-II实时操作系统在压力测控系统中的应用
C8051F041 压力模拟输入 A/D 转换 SPI CAN 控制 D/A 转换 过压保护 图 2 系统硬件结构框图 2.2 C8051F041 内部 A/D 转换器的使用及外围电路设计
脉宽 调制 器 反馈放大
RS-485 收发器 CAN 收发器
M OSEPT 电 磁 阀
C8051F041内部12位ADC转换器使用引脚VREFA作为ADC0转换的输入基准,可以使用片内 产生的电压作为输入基准,也可以外部产生的电压作为基准 。 系统选择外部晶振,选用外部基准作为 A/D 转换基准。C8051F041 的基准参考电压最高 为模拟电压(AV+ -0.3)V,即 3V。VREF 接 4.7uF 钽电容和 0.1uF 旁路陶瓷电容,决定 AD 转 化开启时间为 2ms。 选择外部基准时,参考电压由电源提供,因此需要选电阻为 10K、1K,将电压变为 3V:
2 系统硬件设计
2.1 系统硬件设计框图 系统的硬件框图如图 2 所示。芯片选择 Cygnal 公司的 C8051F041 芯片,之所以选择该 芯片,主要是考虑到压力控制器的体积[2] 。该芯片内部集成 AD、DA 转换芯片以及 CAN 控制 器,另外该芯片调试方便[3] 。压力传感器选择霍尼韦尔的 40PC;脉宽调制器选用 LM3524[4] 。 在系统中,变换输出信号至 c8051F041 的内部 12 位 A/D 转化器,数据进行转换后,将 数据处理后通过 CAN 总线发送至上位机, 另外转换的数据将作为 PID 输出控制采样点, 通过 PID 增量型算法得到△u(K)+u(K),通过 D/A 转换输出控制信号。系统中采用 LM3524 作为脉 宽调制器,其 SHUT 管脚可以用于关闭 LM3524 的 PWM 波的输出。 在设计中采用了过压保护电路,当传感器电路输出电压达到或超过 4.5V,将关闭脉宽 调制器工作,此时阀处于闭合状态。
动态链接库(dll)和静态库的创建及使用教程
动态链接库和静态库的创建及使用教程第一部分静态库(以vs2005为例)一、创建新的静态库项目1.从“文件”菜单中,选择“新建”,然后选择“项目…”。
2.从“项目类型”窗格中,选择“Visual C++”下的“Win32”。
3.从“模板”窗格中,选择“Win32 控制台应用程序”。
4.为项目选择一个名称,如“MathFuncsLib”,并将其输入“名称”字段。
为解决方案选择一个名称,如“StaticLibrary”,并将其输入“解决方案名称”字段。
5.按“确定”启动Win32 应用程序向导。
在“Win32 应用程序向导”对话框的“概述”页中,按“下一步”。
6.从“Win32 应用程序向导”的“应用程序设置”页中,选择“应用程序类型”下的“静态库”。
7.从“Win32 应用程序向导”的“应用程序设置”页中,取消选择“附加选项”下的“预编译头”。
8.按“完成”创建项目。
向静态库添加类1.若要为新类创建头文件,请从“项目”菜单中选择“添加新项…”。
将显示“添加新项”对话框。
从“类别”窗格中,选择“Visual C++”下的“代码”。
从“模板”窗格中选择“头文件(.h)”。
为头文件选择一个名称,如“MathFuncsLib.h”,并按“添加”。
将显示一个空白文件。
2.添加一个名为“MyMathFuncs”的简单类,以执行常见的算术运算,如加、减、乘和除。
代码应与以下内容类似:// MathFuncsLib.hnamespace MathFuncs{class MyMathFuncs{public:// Returns a + bstatic double Add(double a, double b);// Returns a - bstatic double Subtract(double a, double b);// Returns a * bstatic double Multiply(double a, double b);// Returns a / b// Throws DivideByZeroException if b is 0static double Divide(double a, double b);};}3.若要为新类创建源文件,请从“项目”菜单中选择“添加新项…”。
51单片机C语言实验及实践教程2

51单片机C语言实验及实践教程28.按键识别方法之一1.实验任务I/O并行口直接驱动LED显示每按下一次开关SP1,计数值加1,通过AT89S51单片机的P1端口的P1.0到P1.3显示出其的二进制计数值。
2.电路原理图图4.8.13.系统板上硬件连线(1.把“单片机系统”区域中的P3.7/RD端口连接到“独立式键盘”区域中的SP1端口上;(2.把“单片机系统”区域中的P1.0-P1.4端口用8芯排线连接到“八路发光二极管指示模块”区域中的“L1-L8”端口上;要求,P1.0连接到L1,P1.1连接到L2,P1.2连接到L3,P1.3连接到L4上。
4.程序设计方法(1.其实,作为一个按键从没有按下到按下以及释放是一个完整的过程,也就是说,当我们按下一个按键时,总希望某个命令只执行一次,而在按键按下的过程中,不要有干扰进来,因为,在按下的过程中,一旦有干扰过来,可能造成误触发过程,这并不是我们所想要的。
因此在按键按下的时候,图4.8.2要把我们手上的干扰信号以及按键的机械接触等干扰信号给滤除掉,一般情况下,我们可以采用电容来滤除掉这些干扰信号,但实际上,会增加硬件成本及硬件电路的体积,这是我们不希望,总得有个办法解决这个问题,因此我们可以采用软件滤波的方法去除这些干扰信号,一般情况下,一个按键按下的时候,总是在按下的时刻存在着一定的干扰信号,按下之后就基本上进入了稳定的状态。
具体的一个按键从按下到释放的全过程的信号图如上图所示:从图中可以看出,我们在程序设计时,从按键被识别按下之后,延时5ms以上,从而避开了干扰信号区域,我们再来检测一次,看按键是否真得已经按下,若真得已经按下,这时肯定输出为低电平,若这时检测到的是高电平,证明刚才是由于干扰信号引起的误触发,CPU就认为是误触发信号而舍弃这次的按键识别过程。
从而提高了系统的可靠性。
由于要求每按下一次,命令被执行一次,直到下一次再按下的时候,再执行一次命令,因此从按键被识别出来之后,我们就可以执行这次的命令,所以要有一个等待按键释放的过程,显然释放的过程,就是使其恢复成高电平状态。
51单片机实验一实验报告范文

51单片机实验一实验报告范文实验报告班级:姓名:学号:组别:课程名称:单片机原理及应用实验室:实验时间:实验项目名称:实验一MCS-51单片机及其开发系统(仿真器)的认识一、实验目的:学习并掌握单片机仿真系统的操作方法,熟悉系统功能及用法。
(1)了解MCS-51单片机开发常用工具。
(2)了解仿真器构成、功能及连接。
(3)掌握MCS-51开发软件(汇编器)安装、功能及基本操作。
(4)掌握源程序的编辑、汇编、运行(包括连续执行、单步执行和跟踪执行)。
(5)掌握汇编语言指令与机器语言指令之间的对应关系。
(6)掌握ORG、DATA、BIT等伪指令的作用。
(7)掌握在仿真开发系统下浏览、修改特殊功能寄存器、内部RAM、外部RAM单元的方法。
(8)理解MCS-51单片机在复位期间及复位后有关引脚的状态、特殊功能寄存器的初值。
二、实验内容及原理:MdeWin单片机仿真系统的安装、设置、主要功能操作练习。
三、实验器材:MdeWin单片机仿真系统一套、PC机一台。
四、实验步骤及实验结果分析:一、程序输入练习:首先在Medwin下新建一项目,并新建一后缀名为am的文件(汇编源文件),并添加入项目中。
按规定的格式输入以上程序(只输源程序部分)。
二、程序运行和控制:1.程序的编译、产生代码并装入:输入源程序完毕后,可在“项目管理”窗口中点击“编译/汇编”选项,如程序无输入错误、语法错误等,编译完成。
在消息窗口中,产生编译成功信息。
如有错误,则消息窗口中指出错误所在行及错误类型,请重新修改源程序。
编译成功后,在“项目管理”窗口中点击“产生代码并装入”选项,对编译无误后产生的OBJ文件进行连接,并把代码装入仿真器。
代码装入仿真器后,即可实行仿真。
可在反汇编窗口中查看编译产生的机器码,并与上述程序中对照。
记录你认为能说明问题的检查结果。
2.程序的全速、断点、单步等执行方式:为提高调试程序的运行速度,程序采用全速断点运行方式。