基于STM32的自动档位检测系统设计
基于Stm32控制器的LVDT位移测量系统设计(终稿) - 用于合并概要
课程设计报告题目:基于STM32的LVDT位移测量系统设计姓名:余樾班级:09011301学号:2013302132西北工业大学自动化学院基于STM32的LVDT位移测量系统设计任务书1.设计目的与要求设计一个基于STM32控制器的LVDT数字测量系统设计,要求认真并准确地理解有关要求,按组完成系统设计,具体设计要求如下:(1)对流体传动管道中的压力进行,测温范围及精度:38mm,0.5%。
(2)LVDT信号的调制与解调,测量数据存储功能,掉电不丢失;(3)4位八段码实时数据显示;(4)通过RS232通信接口与上位机进行数据通信;(5)功能按键、指示灯和蜂鸣器报警。
2.设计内容(1)查阅资料,熟悉设计内容;(2)根据设计要求选择传感器,确定系统方案和主控芯片;(3)根据系统方案分别设计单元电路;确定元器件及元件参数;(4)画出电路原理图,正确使用逻辑关系。
3.编写设计报告写出设计的全过程,附上有关资料和图纸,并写出心得体会。
目录1. 引言 (1)2. 设计方案 (2)2.1. 任务分析 (2)2.2. 设计思路 (2)3. 详细设计 (3)3.1. 主控制器模块 (3)3.1.1. 微处理器电路 (3)3.1.2. 电源模块 (5)3.1.3. JTAG/SWD电路 (5)3.2. LVDT传感器的测量原理与电路设计 (6)3.2.1. LVDT传感器的测量原理 (6)3.2.2. LVDT传感器电路的设计 (6)3.3. 显示模块 (9)3.4. 串口通信模块 (10)3.5. 存储模块 (10)4. 总结与体会(不宜过长) (11)附录1 MAX7219 (14)附录2 I2C总线 (16)基于STM32的LVDT位移测量系统设计摘要: LVDT可以用来测量物体的伸长度、震动频率、振幅、物体厚薄程度和膨胀度等精确数据。
具体还可以用在机床工具和液压缸的定位,以及辊缝和阀门的控制等。
LVDT还有无摩擦测量、无限的机械寿命、坚固耐用、环境适用性等优点,这使它应用范围也非常广泛。
基于STM32单片机的自动泊车系统设计
2018.No19摘 要 设计了一种基于STM32单片机为核心的自动倒车入库和侧方位倒车入库的智能小车算法。
小车由电机驱动模块、电源模块、无线透传模块、超声波模块、碰撞检测模块、红外光电传感器、陀螺仪等组成;利用无线透传模块小车接收到空闲车位,单片定时器产生PWM波形,通过调整占空比控制小车的速度和方向;利用陀螺仪实时规划小车的运动轨迹;小车采用超声波测距技术测量前方障碍物的距离从而自动避障,小车周围安装碰撞传感器检测碰撞情况并进行自动调整;通过红外光电传感器判读小车是否完全进入车库,本设计具有高度的智能化、人性化,同时该小车具有很高的稳定性。
关键词 小车入库算法 控制系统 无线透传 碰撞检测 红外光电传感器 陀螺仪0 引言智能小车的应用正逐步渗入到工业和社会的各个层面,适合在人类无法工作的环境中工作。
它可以按照预先设定的模式在一个环境里自动运作,不需要人为操作。
可应用于科学勘探等用途的智能小车能够实时显示时间、速度、里程,具有自动寻迹、寻光、避障功能,可程控行驶速度,准确定位停车,远程传输图像等功能。
因此使智能小车工作在最佳状态,进一步研究及完善其速度和方向的控制是非常有必要的。
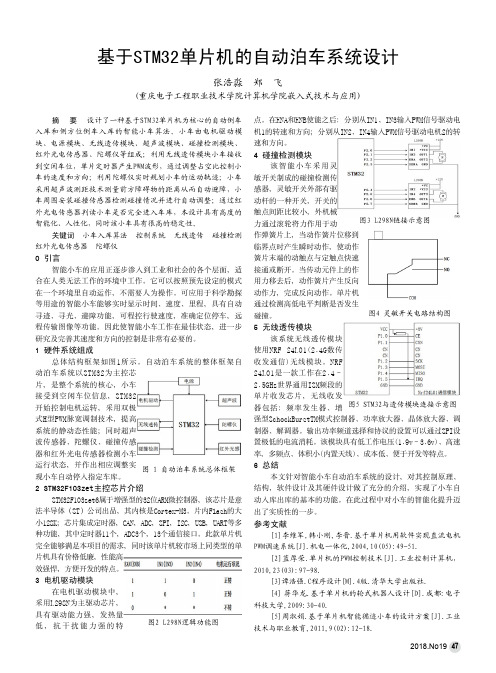
1 硬件系统组成总体结构框架如图1所示。
自动泊车系统的整体框架自动泊车系统以STM32为主控芯片,是整个系统的核心,小车接受到空闲车位信息,STM32开始控制电机运转,采用双极式H型PWM脉宽调制技术,提高系统的静动态性能;同时超声波传感器、陀螺仪、碰撞传感器和红外光电传感器检测小车运行状态,并作出相应调整实现小车自动停入指定车库。
2 STM32F103zet主控芯片介绍STM32F103zet6属于增强型的32位ARM微控制器,该芯片是意法半导体(ST)公司出品,其内核是Cortex-M3。
片内Flash的大小128K;芯片集成定时器,CAN,ADC,SPI,I2C,USB,UART等多种功能,其中定时器11个,ADC3个,13个通信接口。
基于STM32的无线传感网络车辆检测节点的设计
r
好 ND
个 数
通 过
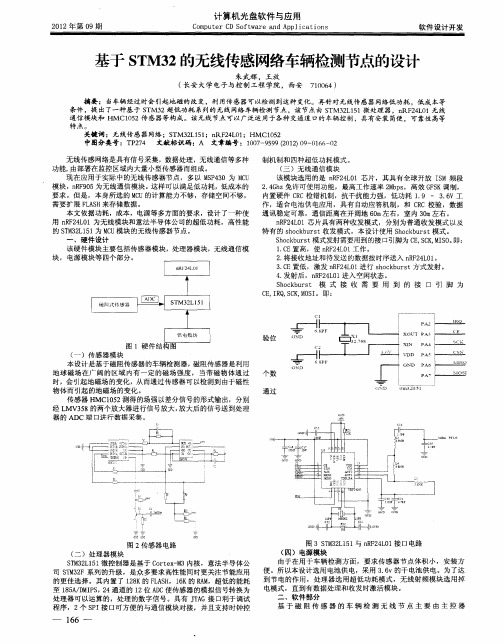
传 感 器 H 15 得 的场 强 以差分 信 号 的形 式 输 出,分别 MC 02测 经 L 3 8的两个放 大 器进 行信 号放 大 , MV 5 放大 后 的信 号送 到处理
器 的 A C端 口讲 行数 据采集 。 D
^: .
一
t ’
图 2 感器 电路 传 ( )处理 器模 块 二 SM 2 1 1 控制 器 是基 于 C re —3内核 ,意法半 导体 公 T 3L 5 微 otx M 司 SM2 T 3 F系列 的升 级 ,是众 多要 求高 性 能同 时更 关注节 能应 用 的更 佳 选择 。其 内置 了 18 2K的 FA H 1K的 R M LS, 6 A ,超低 的能耗 至 15/ MP , 4 道 的 1 8 A D IS 2 通 2位 A C 传感 器 的模拟 信 号转换 为 D使 处理 器 可 以运 算 的 ,处理 的数 字信 号 。具有 JA T G接 口利 于调 试 程序 ,2个 S I 口可方 便 的与通 信模 块对 接 ,并 且支 持时钟 控 P接
一
图 3 SM 2 1l nF 4O 接 口电路 T3 L 5 与 R 2L 1 ( ) 电源 模块 四 由于在 用 于 车辆 检测 方 面 ,要求 传 感器 节 点 体积 小 ,安 装 方 便 。所 以本 设计选 用 电池供 电,采用 36 . v的干 电池 供 电 。为 了达 到 节 电 的作 用 ,处理 器选 用 超低 功 耗模 式 ,无 线 射频 模 块选 用 掉 电模 式 ,直 到有 数据 处理 和 收发 时激活 模块 。
计 算机 光盘 软件 与应 用
2 1 第 o 期 0 2年 g C m u e DS fw r n p l c t O S o p t rC o t a ea dA p ia ii l 软 件 设 计 开 发
《2024年基于STM32单片机的高精度超声波测距系统的设计》范文

《基于STM32单片机的高精度超声波测距系统的设计》篇一一、引言随着科技的不断发展,高精度测距技术广泛应用于机器人、智能家居、无人驾驶等领域。
本文旨在设计一个基于STM32单片机的高精度超声波测距系统,该系统通过超声波测距原理,实现对目标物体的精确测距。
二、系统设计要求1. 高精度:系统应具备高精度的测距能力,误差应控制在一定范围内。
2. 稳定性:系统应具有良好的稳定性,能够在不同环境下保持稳定的测距性能。
3. 实时性:系统应具备实时测距功能,能够快速响应并输出测距结果。
4. 易于集成:系统应易于与其他设备进行集成,方便实际应用。
三、硬件设计1. 主控制器:采用STM32单片机作为主控制器,负责整个系统的控制与数据处理。
2. 超声波传感器:选用高性能的超声波传感器,实现测距功能。
3. 电源模块:为系统提供稳定的电源,保证系统的正常工作。
4. 通信接口:根据实际需求,可扩展串口、I2C、SPI等通信接口,实现与其他设备的通信。
四、软件设计1. 驱动程序设计:编写超声波传感器的驱动程序,实现对传感器的控制与数据读取。
2. 数据处理程序:对读取的超声波数据进行处理,计算目标物体的距离。
3. 实时性处理:采用中断或定时器等方式,实现实时测距功能。
4. 通信程序设计:根据实际需求,编写与其他设备进行通信的程序。
五、系统实现1. 超声波传感器的工作原理是通过发送超声波并接收其反射回来的时间来计算距离。
系统通过STM32单片机的GPIO口控制超声波传感器的发送与接收。
2. 在软件设计中,通过编写驱动程序,实现对超声波传感器的控制与数据读取。
数据处理由STM32单片机进行计算,将读取的超声波数据进行处理,得到目标物体的距离。
3. 为了保证系统的实时性,采用中断或定时器等方式,实现实时测距功能。
当超声波传感器接收到反射回来的超声波时,中断或定时器触发,STM32单片机立即进行数据处理,并输出测距结果。
4. 根据实际需求,可扩展串口、I2C、SPI等通信接口,实现与其他设备的通信。
《2024年基于STM32单片机的高精度超声波测距系统的设计》范文

《基于STM32单片机的高精度超声波测距系统的设计》篇一一、引言随着科技的不断进步,测量技术在众多领域中的应用日益广泛。
高精度超声波测距系统,以其非接触式、测量速度快和成本低廉的优点,被广泛应用于智能机器人、车辆导航、无人机飞行控制等场景。
本文将详细介绍基于STM32单片机的高精度超声波测距系统的设计,包括系统架构、硬件设计、软件设计以及实验结果分析等方面。
二、系统架构本系统采用STM32单片机作为主控制器,通过超声波传感器进行测距。
系统主要由STM32单片机、超声波传感器、电源模块、信号处理模块等部分组成。
其中,STM32单片机负责控制超声波传感器的发射与接收,以及处理测距数据;超声波传感器负责将超声波信号发送出去并接收反射回来的信号;电源模块为系统提供稳定的电源;信号处理模块用于对接收到的信号进行滤波、放大等处理,以提高测距精度。
三、硬件设计1. STM32单片机:选用性能稳定、功能强大的STM32系列单片机作为主控制器,负责控制整个系统的运行。
2. 超声波传感器:选用高精度的超声波传感器,具有灵敏度高、测量范围广等优点。
通过单片机的GPIO口控制传感器的发射与接收。
3. 电源模块:为系统提供稳定的电源,包括电池或外接电源两种供电方式。
4. 信号处理模块:对接收到的超声波信号进行滤波、放大等处理,以提高测距精度。
四、软件设计1. 初始化:对STM32单片机进行初始化设置,包括GPIO口、时钟等。
2. 控制超声波传感器:通过GPIO口控制超声波传感器的发射与接收,发送一定频率的超声波信号并等待接收反射回来的信号。
3. 信号处理:对接收到的信号进行滤波、放大等处理,然后通过ADC(模数转换器)将信号转换为数字信号。
4. 距离计算:根据测量的时间差(即超声波信号往返的时间),结合声速,计算出物体与传感器之间的距离。
5. 显示与输出:将测量的距离通过LCD或LED等方式显示出来,同时可通过串口或蓝牙等方式将数据传输到其他设备。
基于Stm32控制器的LVDT位移测量系统设计(终稿) - 用于合并讲解

课程设计报告题目:基于STM32的LVDT位移测量系统设计姓名:余樾班级:09011301学号:2013302132西北工业大学自动化学院基于STM32的LVDT位移测量系统设计任务书1.设计目的与要求设计一个基于STM32控制器的LVDT数字测量系统设计,要求认真并准确地理解有关要求,按组完成系统设计,具体设计要求如下:(1)对流体传动管道中的压力进行,测温范围及精度:38mm,0.5%。
(2)LVDT信号的调制与解调,测量数据存储功能,掉电不丢失;(3)4位八段码实时数据显示;(4)通过RS232通信接口与上位机进行数据通信;(5)功能按键、指示灯和蜂鸣器报警。
2.设计内容(1)查阅资料,熟悉设计内容;(2)根据设计要求选择传感器,确定系统方案和主控芯片;(3)根据系统方案分别设计单元电路;确定元器件及元件参数;(4)画出电路原理图,正确使用逻辑关系。
3.编写设计报告写出设计的全过程,附上有关资料和图纸,并写出心得体会。
目录1. 引言 (1)2. 设计方案 (2)2.1. 任务分析 (2)2.2. 设计思路 (2)3. 详细设计 (3)3.1. 主控制器模块 (3)3.1.1. 微处理器电路 (3)3.1.2. 电源模块 (5)3.1.3. JTAG/SWD电路 (5)3.2. LVDT传感器的测量原理与电路设计 (6)3.2.1. LVDT传感器的测量原理 (6)3.2.2. LVDT传感器电路的设计 (6)3.3. 显示模块 (9)3.4. 串口通信模块 (10)3.5. 存储模块 (10)4. 总结与体会(不宜过长) (11)附录1 MAX7219 (14)附录2 I2C总线 (16)基于STM32的LVDT位移测量系统设计摘要: LVDT可以用来测量物体的伸长度、震动频率、振幅、物体厚薄程度和膨胀度等精确数据。
具体还可以用在机床工具和液压缸的定位,以及辊缝和阀门的控制等。
LVDT还有无摩擦测量、无限的机械寿命、坚固耐用、环境适用性等优点,这使它应用范围也非常广泛。
基于STM32的智能小车自动循迹及倒车入库设计
在STM32控制器中,通过C语言编写循迹和倒车算法。具体实现过程如下:
(1)循迹算法:根据光敏传感器和红外线传感器的信号,判断小车是否偏 离了预定线路。如果偏离,则通过电机驱动模块调整小车的运动方向和速度,使 其回到预定线路。
(2)倒车算法:根据库位规划和预设路径,控制小车的运动方向和速度, 使其能够顺利地倒车入库。在倒车过程中,不断调整小车的运动方向和速度,以 实现精确的倒车入库。
通过实验测试,本次演示设计的自动循迹小车能够有效地识别道路颜色和磁 场变化,实现稳定可靠的循迹效果。在实验中,小车能够准确地按照预定线路行 驶,并且在遇到弯道和障碍物时能够自动调整运动方向和速度,以实现稳定的循 迹效果。
2、倒车入库效果分析
通过实验测试,本次演示设计的倒车入库小车能够实现精确可靠的倒车入库。
4、无线通信模块:使用HC-05蓝牙模块实现遥控器控制和手机APP实时监控 等功能。
5、系统调试:通过SD卡存储循迹路径,实现系统调试功能。同时,可以通 过LED指示灯观察小车的运行状态。
三、性能测试
在实验室环境中对智能循迹小车的性能进行测试。通过多次试验,观察小车 的循迹精度、避障效果、运行稳定性等方面的情况。根据实验结果对小车的软硬 件进行优化和改进。
自动循迹设计
1、传感器选择
在自动循迹设计中,传感器是至关重要的组成部分。本次演示选用光敏传感 器和红外线传感器两种传感器相结合的方式来获取道路信息。光敏传感器主要用 来检测路面颜色变化,而红外线传感器则能够检测道路上的磁场变化,从而实现 循迹功能。
2、循迹算法设计
循迹算法是实现自动循迹的关键部分。本次演示采用基于阈值和滤波的算法 来实现循迹。首先,通过预处理去除传感器信号中的噪声,然后根据道路和障碍 物的不同特性,设定合适的阈值,将传感器信号转化为二值化信号,最后通过不 断的迭代,使小车能够稳定地按照预定线路行驶。
基于STM32的全自动智能立体车库系统设计
第40卷 第4期 高 师 理 科 学 刊 Vol. 40 No.4 2020年 4月 Journal of Science of Teachers′College and University Apr. 2020文章编号:1007-9831(2020)04-0047-04基于STM32的全自动智能立体车库系统设计吴豪,王红宇,李枝强,马利浩,邓佳宾(齐齐哈尔大学 通信与电子工程学院,黑龙江 齐齐哈尔 161006)摘要:设计了一种智能立体车库系统,并将其制作成了实物模型.该系统以STM32作为核心控制芯片,51单片机作为辅助芯片,使用驱动齿轮闸机装置实现了小车的传送、存放、取出等功能操作.硬件上由电源模块、压力传感器、烟雾传感器、RFID电子标签、LCD显示屏等模块组成,实现车架自动升降、车库照明、安全系统报警及当前车位状态显示等功能.软件上通过上位机的人机交互界面,在无需工作人员协助的情况下,用户可自助结账和存取车辆.与此同时,通过蓝牙模块将车库的使用情况实时地上传到上位机端,工作人员可对车库实现远程监控.经过测试,该系统实现了预设功能,在很大程度上解决了司机停车难的问题.关键词:智能管理;车牌识别;车位诱导;车辆检测中图分类号:TP39∶U270 文献标识码:A doi:10.3969/j.issn.1007-9831.2020.04.010Design of fully automatic intelligent stereo garage based on STM32WU Hao,WANG Hongyu,LI Zhiqiang,MA Lihao,DENG Jiabin(School of Communication and Electronic Engineering,Qiqihar University,Qiqihar 161006,China)Abstract:Designs an intelligent stereo garage system and the system is maded into a physical model.The system takes STM32 as the core control chip,51 MCU is used as the auxiliary chip,and the transmission,storage,removal and other functions of the trolley are realized by using the driving gear gate device.The hardware is consist of power module,pressure sensor,smoke sensor,RFID electronic tag,LCD display screen and other modules that achieves the automatic lifting of vehicle frame,garage lighting,alarm of safety system,display of current parking status and other functions.The man-machine interface of the upper computer,without the assistance of staff,save car users can self-check out and self-access cars is design in the software of the system.At the same time,the system can also transmit the usage of the garage to the upper computer through the bluetooth module in real time,the remote monitoring function of the garage is realized.After testing,the system realizes the pre-adjustment function and solves the problem of difficult parking for drivers to a great extent.Key words:intelligent management;license plate identification;parking induction;vehicle detection随着人们生活水平的不断提高,汽车的保有量也逐年递增,该情况使得汽车的存放成为人们驾车出行的一大难题,因此智能立体车库的出现使这个问题得到改善.智能立体车库不仅节省了土地,实现了资源利用最大化,还节省了人力成本,从根本上解决了停车难的问题,提升车位资源的使用效率[1].所以智能立体车库是今后的发展趋势,在智能工业不断发展和完善的过程中,新型智能立体车库将会代替传统的停收稿日期:2019-12-18基金项目:大学生创新创业竞赛项目(201910232209)作者简介:吴豪(1998-),男,广东雷州人,在读本科生.通信作者:邓佳宾(1983-),男,黑龙江齐齐哈尔人,讲师,在读博士,从事无线通信研究.E-mail:************48 高 师 理 科 学 刊第40卷车方式,朝着环保、便利、节约资源的方向发展[2].1 总体设计该设计分为2层,每层共有3个停车位,车库的总体设计见图1~2.智能立体车库是全自动的停车系统,它由控制系统、上位机、RFID 电子标签组成.首先系统将RFID 电子标签采集到的车辆信息(车牌号等)发送给控制单元,然后控制单元再与电脑建立通信连接[3],将车辆的存放信息准确无误的传输到上位机端.该立体车库利用托板电机和传送带完成存取停放车辆的任务,当用户需要存车时,将其车辆停放到指定位置,由控制单元判断当前车位的停放情况,然后再由控制托板电机和传送带设备将车辆传送到指定位置;当用户需要取车时,系统通过读取采集到的信息,由控制托板电机和传送带将车辆传送到指定位置,用户将车辆取出[4].该立体车库用STM32作为核心控制芯片,51单片机作为辅助芯片,配以电源模块、蓝牙模块、压力传感器、烟雾传感器、RFID 电子标签、LCD 显示屏模块来实现系统的操作和运行.2 硬件设计该系统的硬件主要由导航模块、信息采集模块、动力模块、信息显示模块、通信模块、电源模块以及火灾警报模块组成(见图3).(1)导航模块.每一个停车位都布有压力传感器,用它来识别车位是否为空.(2)信息采集模块.该模块是基于RFID 电子标签来实现的,在车主刷卡进入停车场时,读卡器自动获取用户车辆的基本信息,识别工作无须人工干预.(3)动力模块.通过单片机对电机控制(单片机产生PWM 脉冲来控制),使车辆按设定的速度和规定路线运行.(4)信息显示模块.采用LCD1602液晶显示屏,主要显示车辆的基本信息以及车辆停放情况.(5)通信模块.采用蓝牙通信模块,用于实现上位机与下位机之间的通信,该模块是基于BluetoothSpecification IEEE802.1蓝牙协议搭建而成的[5],具有性能稳定、嵌入方便、丢包率低等优点.(6)电源模块.采用电源分立配送(当车库进行灭火操作需要断电时,灭火系统的电源是独立的). (7)警报模块.当停车场发生火灾等意外事故时,该模块利用烟雾传感器向单片机传送低电平信号,此时单片机启动蜂鸣器报警,并启动喷洒装置进行灭火,实现对火情的控制[6].3 软件设计软件设计部分,硬件编程采用C 语言,上位机采用C#语言进行编程,车辆存取的软件流程见图4. 3.1 存车流程电源分配室车库系统俯视图第4期 吴豪,等:基于STM32的全自动智能立体车库系统设计 49当用户需要存车时,首先,车辆需要被停放到指定位置,然后用户通过读卡器刷卡,读卡器将卡片ID 值传给单片机,并在单片机内执行条件判断语句判断该用户所持有的卡片ID 号是否在本停车场注册过.若已注册则车辆可以通过,否则需要先注册才能进入停车场.其次,系统进行数据采集程序运行,控制系统判断车库内停车位的当前存放情况,自动为用户分配车位.最后,启动传送带,将车辆进行传送到指定位置.此时托板电机启动,将车辆送至指定车位,电机运行的时间以及状态通过定时器中断程序来控制.3.2 取车流程当用户需要取车时,用户需要先刷卡,然后系统程序开始运行.首先,托板电机装置开始运作,将车辆从目标车位横移出来,然后送至指定位置,车辆到达之后,传送带装置开始运作,将车辆传送到指定位置,最后用户将车辆取出,取车完毕等待下一个操作指令.3.3 上位机上位机采用C#语言编写程序,把程序下载到上位机中.上位机将采集的信息显示在上位机屏幕中.4 系统测试在该阶段对项目进行安装和调试.首先,进行硬件调试,综合考虑51,STM32和驱动齿轮闸机的整体功能匹配,将各个部分的功能统一进行调试,然后采集数据并做数据分析,对数据偏差较大的部分进行调整修改,使实验数据更加贴近理想数据[7].其次,进行软件调试,先将程序烧写进STM32和51单片机,并将车辆信息录入RFID 电子标签内,然后将射频卡采集的信息传送到STM32单片机内进行处理,记录停车信息[8].通过蓝牙模块与整个智能停车场主控进行串口通信,并将信息传输到上位机端 [9-10].最后,进行整体测试,对测试中遇到的问题做集中处理,进行最后综合调试.(下转第54页)硬件控制图54 高 师 理 科 学 刊 第40卷参考文献;[1] CAMILO F,RANSOM S M,GAENSLER B M,et al.Discovery of the Energetic Pulsar J1747-2809 in the Supernova RemnantG0.9+0.1[J].The Astrophysical Journal Letters,2009,700(1):34-38[2] DUBNER G,GIACANI E,DECOURCHELLE A.High resolution radio study of the pulsar wind nebula within the supernovaremnant G0.9+0.1[J].Astronomy and Astrophysics,2008,487(3):1033-1040[3] PORQUET D,DECOURCHELLE A,WARWICK R S.XMM-Newton spectral analysis of the Pulsar Wind Nebula within thecomposite SNR G0.9+0.1[J].Astronomy and Astrophysics,2003,401(4):197-203[4] AHARONIAN F,AKHPERJANIAN A G,AYE K M,et al.Very high energy gamma rays from the composite SNR G0.9+0.1[J].Astronomy and Astrophysics,2005,432(2):25-29[5] COLLABORATION H E S S,ABDALLA H,ABRAMOWSKI A,et al.The H E S S Galactic plane survey[J].Astronomy andAstrophysics,2018,612(4):1-61[6] LERCHE I,SCHLICKEISER R.On the transport and propagation of relativistic electrons in galaxies[J].Astrophysical JournalSupplement Series,1981,47(2):148-160[7] REN J Y,GAO Q G,LI H Z,et al.Nonthermal Emission and Spectral Evolution Properties of G54.1+0.3[J].Monthly Notices ofthe Royal Astronomical Society,2019,487(3):5781-5787[8] LI H,CHEN Y,ZHANG L.Lepto-hadronic origin of gamma-rays from the G54.1+0.3 pulsar wind nebula[J].Monthly Notices ofthe Royal Astronomical Society,2010,408(1):80-84[9] BUCCIANTINI N,ARONS J,Amato E.Modelling spectral evolution of pulsar wind nebulae inside supernova remnants[J].MonthlyNotices of the Royal Astronomical Society,2011,410(1):381-398[10] BUCCIANTINI N,BANDIERA R,BLONDIN J M,et al.The effects of spin-down on the structure and evolution of pulsar windnebulae[J].Astronomy and Astrophysics,2004,422(1):609-619[11] ZHANG L,CHEN S B,FANG J.Nonthermal Radiation from Pulsar Wind Nebulae[J].The Astrophysical Journal,2008,676(2):1210-1217[12] FANG J,ZHANG L.Multiband emission from pulsar wind nebulae:a possible injection spectrum[J].Astronomy and Astrophysics,2010,515(1):20-28(上接第49页)5 结语本文设计的立体车库采用STM32作为主控芯片实现了硬件功能,通过驱动齿轮闸机装置实现了机械功能,用C#语言实现了软件设计.经过测试,该系统达到了预设目标,完成了智能立体车库的全部功能.相信随着技术的发展和完善,智能立体车库必将取代现有停车设备,成为我国未来的智能停车设备的首选.参考文献:[1] 程子健,赵永强.机械式智能立体车库的创新设计[J].内燃机与配件,2017(23):1-2[2] 邓杰.基于智能技术的机械式立体车库控制系统设计[J].中国高新科技,2019(13):51-54[3] 杨哲铭,王旭东,杨振华,等.基于STM32F103的智能停车场车位引导系统[J].信息记录材料,2018,19(1):83-85[4] 张琴,龚成林.基于PLC的智能立体车库设计[J].电脑与电信,2019(4):42-44,47[5] 丁伟成,崔恩汉,杜思晗.智能车库的设计及其调度策略[J].中小企业管理与科技(下旬刊),2019(7):181-182[6] 王强,陈海龙,夏昭.新型立体化智能车库控制系统的设计与实现[J].自动化与仪表,2018,33(4):95-99[7] 刘鑫,李向均,李淑滢,等.智能车库[J].电子世界,2018(23):109[8] 徐佳敏,王改芳.基于STM32和RFID的小区车辆管理系统设计[J].实验技术与管理,2015(10):154-156[9] 付立华,白靖宇,庞展翔.一种智能立体车库的设计与实验室实现[J].实验室研究与探索,2019,38(4):62-66[10] 李昶亮,谢乐天,于贝.智能立体车库模拟系统设计与实现[J].电子世界,2018(1):105-107。
基于STM32的测量定位系统设计-精品

第一章绪论1.1概述1.1.1研究现状在地质勘探或是油田勘探的过程中,常会用到地震勘探。
爆炸震源是地震勘探中广泛采用的非人工震源。
虽然目前已发展了重锤、连续震动源、气动震源等一系列地面震源,但陆地地震勘探经常采用的重要震源仍为炸药。
炸药安放的过程中需要测量起爆电缆的长度,准确的测定线路的长度是勘探顺利进行的前提和保证。
但是由于炸药安放在地面下的竖井中,难以直接测量线缆的长度。
目前勘测中常使用的方法是利用电阻表测量电缆的电阻值,再通过换算得出导线的长度。
测量过程中需要人工对测量结果进行换算和记录,不仅增加了勘探的工作量,在换算和记录过程中还容易产生错误。
在地址勘测中,勘测地点往往都在野外,缺乏固定的标记物和指示。
尤其在密林和荒漠等环境中,必须借助仪器来定位。
目前最常用定位仪器通常都要使用到GPS。
GPS是Global Positioning System(全球定位系统)的缩写,是美国从本世纪70年代开始研制,历时20年,耗资200亿美元,于1994年全面建成,具有在海、陆、空进行全方位实时三维导航与定位能力的新一代卫星导航与定位系统。
该系统的建立从根本上解决了人类在陆地、海洋、航空、航天等各个方面的导航和定位问题, 具有很高的实用价值。
在电力系统通信和电力系统自动化等领域也有广泛的应用。
当初,设计GPS系统的主要目的是用于导航,收集情报等军事目的。
但是,后来的应用开发表明,GPS系统不仅能够达到上述目的,而且用GPS卫星发来的导航定位信号能够进行厘米级甚至毫米级精度的静态相对定位,米级至亚米级精度的动态定位,亚米级至厘米级精度的速度测量和毫微秒级精度的时间测量。
因此,GPS系统展现了极其广泛的用途。
用GPS信号可以进行海、空和陆地的导航,导弹的制导,大地测量和工程测量的精密定位,时间的传递和速度的测量等。
对于测绘领域,GPS卫星定位技术已经用于建立高精度的全国性的大地测量控制网,测定全球性的地球动态参数;用于建立陆地海洋大地测量基准,进行高精度的海岛陆地联测以及海洋测绘;用于监测地球板块运动状态和地壳形变;用于工程测量,成为建立城市与工程控制网的主要手段。
《2024年基于STM32单片机的高精度超声波测距系统的设计》范文

《基于STM32单片机的高精度超声波测距系统的设计》篇一一、引言随着科技的不断发展,测距技术在许多领域得到了广泛的应用。
为了满足高精度、高效率的测距需求,本文设计了一种基于STM32单片机的高精度超声波测距系统。
该系统利用超声波的传播特性,结合STM32单片机的强大处理能力,实现了高精度的测距功能。
二、系统设计概述本系统主要由超声波发射模块、接收模块、STM32单片机以及上位机组成。
其中,STM32单片机作为核心控制器,负责控制超声波的发射与接收,以及与上位机进行通信。
三、硬件设计1. 超声波发射模块:采用高精度的超声波传感器,通过STM32单片机的控制,实现超声波的发射。
发射模块包括超声波传感器、驱动电路和发射电路。
2. 超声波接收模块:接收反射回来的超声波信号,并将其转换为电信号。
接收模块包括超声波传感器、信号处理电路和模拟数字转换器(ADC)。
3. STM32单片机:作为系统的核心控制器,负责控制超声波的发射与接收,处理接收到的信号,以及与上位机进行通信。
4. 上位机:用于显示测距结果,以及进行参数设置和系统控制。
上位机可以采用PC机或移动设备。
四、软件设计1. 初始化:对STM32单片机进行初始化设置,包括时钟配置、GPIO口配置、ADC配置等。
2. 超声波发射控制:通过STM32单片机控制超声波发射模块,发出固定频率的超声波信号。
3. 信号处理:接收模块将接收到的超声波信号转换为电信号后,通过ADC转换为数字信号,然后进行滤波、放大等处理,以提高信号的信噪比。
4. 测距计算:根据超声波的传播速度和传播时间,计算测距结果。
将传播时间与声速相乘,即可得到距离值。
5. 通信协议:STM32单片机与上位机之间采用串口通信协议进行数据传输。
上位机发送控制指令,STM32单片机根据指令执行相应的操作,并将测距结果发送给上位机。
6. 界面显示:上位机将测距结果显示在界面上,方便用户查看。
五、系统性能分析本系统具有以下优点:1. 高精度:采用高精度的超声波传感器和先进的信号处理技术,实现了高精度的测距功能。
(完整版)基于stm32的低频数字相位测量仪毕业设计

授课学期2014 学年至2015 学年第一学期学院电子工程学院专业电子信息工程罗春华何振华李智灵吴诗凤凌琼娜任课教师秦兴盛成绩阅读教师签名日期广西师范大学学工部(处)制基于stm32的低频相位测量仪设计摘要:本设计提出了一种基于stm32f103rbt6单片机开发的低频数字相位测量仪的方案。
主要包括相位测量模块、单片机最小系统、显示模块的设计。
可以对低频率范围的信号进行相位等参数的精确测量,测相绝对误差不大于4°。
相位测量模块采用对输入的两路信号(同频率、不同相位)通过比较器整形、鉴相器异或之后得到的相位差,输入到单片机的中断口进行数据采集处理;采用LCD1602显示被测信号的相位差。
硬件结构简单,软件采用汇编语言实现,程序简单可读写性强、效率高。
与传统的电路系统相比,其有处理速度快、稳定性高、性价比高的优点。
关键词相位差单片机低频误差THE DESIGN OF LOW-FREQUENCYPHASE-MEASURING INSTRUMENTHARDWARE CIRCUITABSTRACTThe design of this low-frequency digital phase measurement program based on stm32f103rbt6.It include phase measurement modules, the smallest single-chip systems, display module, power module design. It can make precision measurement of low-frequency range phase of the signal parameters, measurement of absolute error no greater than 1.Phase measurement modules use two input signals(The same frequency and different phase)Through the comparator shaping XOR phase detector of the phase, To the microcontroller interrupt input port for data acquisition and processing. We choose LCD to display the measured phase difference signal. The is shown by assembly language. The program can be read and written simply and strongly and = psc; 时钟分割TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;模式TIM_TimeBaseInit(TIM5, &TIM_TimeBaseStructure);基本初始化}结束语本次课程设计让我们懂得了如何去设计一个电路,如何排解遇到的困难,解决遇到的问题,在老师的带领下,我们一步步走向课程设计的尾声,做出了我们的作品,有很大的收获。
基于STM32微处理器和CAN总线的汽车换挡系统设计
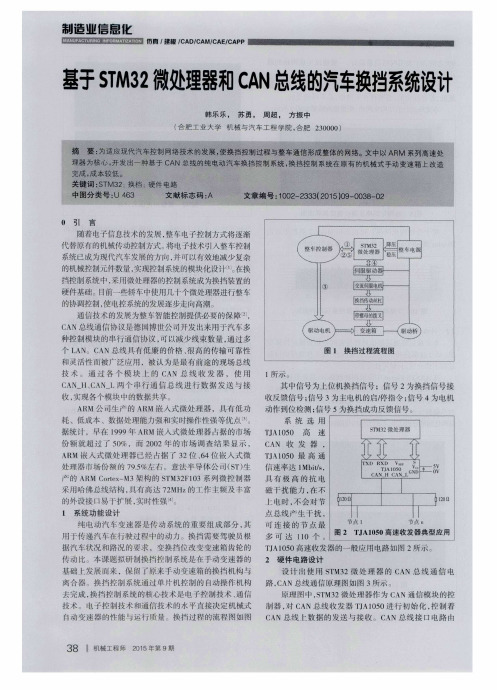
F J A 1 0 5 0 最 高 通
信 速率 达 l Mb i t / s ,
产 的 AR M C o r t e x — M3架构 的 S T M3 2 F1 0 3系 列微 控 制 器 具 有 极 高 的 抗 电
离 合器 。换 挡 控 制 系统通 过 单 片机控 制 的 自动 操作 机 构
去 完成 , 换 挡 控 制 系统 的核 心技 术 是 电 子控制 技 术 、 通 信
设 计 使 用 S T M3 2微 处 理 器 的 C A N总线通 信 电 路, C A N总线 通 信原 理 图如 图 3 所示 。
器r r J A1 0 5 0组成 。
屏 蔽 双绞 线 , 减 少 通信 过 程 中 的信 号 干扰 。在 C A N总 线 的 1 2 0 的匹 配 电阻 ,
为了提 高 C A N总线模块数据 通信 的抗 干扰能力 , 可 以增 强 总线 传输 的抗 干扰能 力 、 延 长通 信距 离 。
采 用 哈佛 总线 结 构 , 具有高达 7 2 M H z 的二 l 作 主频及 丰富 的外设 接 口易于扩 展 , 实 时性 强 。 1 系统 功 能设计 纯 电动 汽车 变 速 器 是传 动 系 统 的 重 要组 成 部 分 , 其 用 于传 递汽 车 在行 驶过 程 中 的动 力 。换 挡 需要 驾 驶 员根 据 汽车 状况 和路况 的要 求 ,变换挡 位 改 变变速 箱 齿 轮 的 传 动 比。本 课 题拟 研 制换 挡控 制 系统 是在 手 动 变速 器 的
0 引 言
随着电子信息技术的发展 , 整车电子控制方式将逐渐
代替 原有 的机械传 动控 制方式 。 将 电子技术 引入 整车控 制 系统 已成 为现代 汽 车发展 的方 向 , 并 可 以有效 地减 少复 杂 的机 械控 制元件数 量 . 实现控 制 系统 的模块 化设计 ” 。 在换 挡控 制 系统 中 , 采用 微处 理器 的控制 系统 成 为换 挡 装置 的
基于STM32和红外测距的车位监测系统设计
基于STM32和红外测距的车位监测系统设计作者:林玉淞赵虎来源:《科学导报·学术》2019年第03期摘要:针对目前大多数地下停车场车位管理混乱的现状,采用红外测距技术,设计了一种以 STM32 单片机为核心的车位监测系统。
系统采用IR333C-A作为红外发射管,PT334-6B 作为红外接收管,发射管发射出一定频率的红外线,当检测方向遇到障碍物(反射面)时,红外线反射回来被接收管接收,经过比较器电路处理之后,输出接口输出数字信号,根据反馈回来的数字信号,判断车位的情况,由此可以准确的监测到停车场车位的实时情况。
关键词:STM32单片机;红外测距;比较电路;监测引言在生活中,目前大多数地下停车场基本上都是采用人工管理,由于人力有限,管理上存在不能及时了解停车场内车位的实时情况,浪费人力查看,费事费力,因此,本文设计了一套成本低,操作简便的车位红外监测系统。
车位红外监测系统,以STM32单片机为系统核心,采用红外传感器进行监测,红外测距传感器是一种传感装置,以红外线为介质的测量器件,测量范围广,响应时间短,广泛应用于当今工农业生产和物联网等领域。
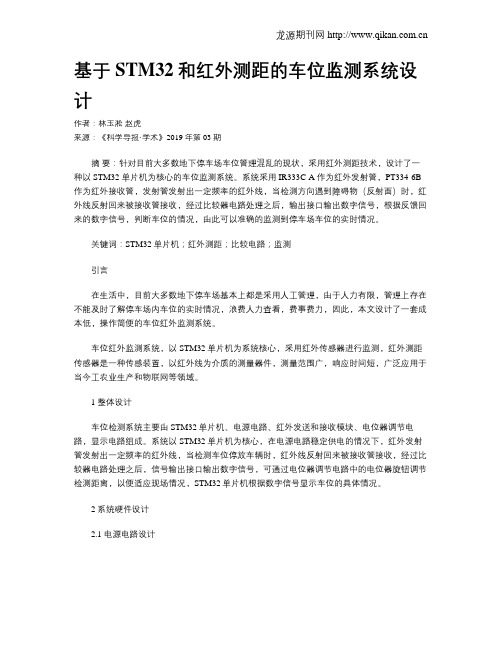
1 整体设计车位检测系统主要由STM32单片机、电源电路、红外发送和接收模块、电位器调节电路,显示电路组成。
系统以STM32单片机为核心,在电源电路稳定供电的情况下,红外发射管发射出一定频率的红外线,当检测车位停放车辆时,红外线反射回来被接收管接收,经过比较器电路处理之后,信号输出接口输出数字信号,可通过电位器调节电路中的电位器旋钮调节检测距离,以便适应现场情况,STM32单片机根据数字信号显示车位的具体情况。
2 系统硬件设计2.1 电源电路设计本系统采用LM2940作为整个电路的供电芯片,LM2940输出电压固定的低压差三端稳压器,输出电压5V,输出电流1A,内含静态电流降低电路、电流限制、过热保护、电池反接和反插入保护电路。
通过图1所示的电路,可以为整个系统提供稳定的5V电压。
基于STM32的智能车位检测系统设计

总757期第二十三期2021年8月河南科技Henan Science and Technology基于STM32的智能车位检测系统设计吴飞燕(江西师范高等专科学校物联网学院,江西鹰潭335000)摘要:为了解决大型商场在高峰时期车位紧张、车主进入车库后盲目寻找车位引起交通堵塞以及无法实时统计当天该车位的停车次数等问题,设计了一款基于STM32的智能车位检测系统。
该系统以STM32L431RC 微控器作为主控芯片,分别采用超声波测距模块作为车位状态检测模块、光电传感器模块进行停车车辆的检测和计数操作、火焰探测传感器模块作为检测车位着火模块、智能路灯模块作为车位的照明模块、有机发光二极管模块作为车位停车次数的显示模块,NB-IoT通信模块将数据传输至车主手机上。
该系统实现了车位状态检测、车位停车次数统计和车位着火监控等功能。
结果表明,该系统具有实时性、稳定性强等特点,易于实现。
关键词:车位检测;STM32;超声波测距;BC35G中图分类号:U491.7文献标识码:A文章编号:1003-5168(2021)23-0023-04 Design of Intelligent Parking Space Detection System Based on STM32WU Feiyan(Jiangxi Teachers College,College of Internet of Things,Yingtan Jiangxi335000)Abstract:In order to solve the problems of shortage of parking spaces in large shopping malls during peak hours,car owners blindly look for parking spaces after entering the garage,causing traffic congestion,vehicle safety hazards caused by parking space fire,and unable to count the parking times of the parking space on the same day in real time. This paper designs an intelligent parking space detection system based on STM32.The system takes STM32L431RC microcontroller as the main control chip,and uses ultrasonic ranging module as the detection module of parking space state,the photoelectric sensor module is used as the detection and counting operation of parking vehicles,flame detection sensor module as the detection module of parking space fire.the intelligent street lamp module is used as the lighting module of the parking space,the OLED module is used as the display module of the parking times of the parking space,and the NB-IoT communication module transmits the data to the owner's mobile phone.The system re⁃alizes the functions of parking space state detection,parking number statistics and parking space fire monitoring.The results show that the system has real-time,strong stability and easy to implement.Keywords:parking space detection;STM32;ultrasonic ranging;BC35G近些年,随着人们生活水平的大幅提升,私家车数量迅猛增长。
《2024年基于STM32的汽车电子稳定控制系统的研究》范文

《基于STM32的汽车电子稳定控制系统的研究》篇一一、引言随着汽车工业的快速发展,汽车安全性能的提升已成为行业关注的焦点。
电子稳定控制系统(Electronic Stability Control System,简称ESC)作为现代汽车安全技术的重要组成部分,对于提高汽车的操控性和稳定性具有重要作用。
STM32系列微控制器因其高性能、低功耗的特点,在汽车电子稳定控制系统中得到了广泛应用。
本文将针对基于STM32的汽车电子稳定控制系统展开研究。
二、STM32微控制器在汽车电子稳定控制系统中的应用STM32系列微控制器以其强大的处理能力和丰富的外设接口,为汽车电子稳定控制系统提供了强有力的支持。
在汽车电子稳定控制系统中,STM32微控制器主要负责采集车辆的行驶状态信息,如车速、转向角度、侧向加速度等,并通过对这些信息的处理和分析,实现车辆的稳定控制。
具体而言,STM32微控制器通过与各种传感器和执行器进行通信,实时获取车辆的行驶状态信息。
然后,通过对这些信息的处理和分析,微控制器能够判断车辆是否处于不稳定状态,如侧滑、侧翻等。
一旦发现车辆处于不稳定状态,微控制器将通过控制执行器,如刹车系统、动力系统等,对车辆进行干预,使车辆恢复稳定状态。
三、汽车电子稳定控制系统的研究内容汽车电子稳定控制系统的研究主要包括以下几个方面:1. 传感器技术:传感器是电子稳定控制系统的关键部件,负责实时获取车辆的行驶状态信息。
因此,研究高性能、高精度的传感器技术对于提高电子稳定控制系统的性能具有重要意义。
2. 控制系统算法:控制系统算法是电子稳定控制系统的核心,直接影响到系统的性能和效果。
因此,研究先进的控制系统算法,如模糊控制、神经网络控制等,对于提高电子稳定控制系统的性能具有重要作用。
3. 执行器技术:执行器是电子稳定控制系统的另一个关键部件,负责根据控制系统的指令对车辆进行干预。
因此,研究高性能、高可靠性的执行器技术对于提高电子稳定控制系统的效果具有重要意义。
《2024年基于STM32的汽车电子稳定控制系统的研究》范文

《基于STM32的汽车电子稳定控制系统的研究》篇一一、引言随着汽车工业的快速发展,汽车安全性能的改善显得尤为重要。
汽车电子稳定控制系统(ESC)是提高汽车安全性能的关键技术之一。
它能够在汽车行驶过程中实时监控并控制汽车的行驶状态,防止因驾驶失误或其他外界因素导致的不稳定现象,如侧滑、转向过度或不足等。
STM32系列微控制器以其高性能、低功耗的特点,在汽车电子稳定控制系统中得到了广泛应用。
本文将基于STM32微控制器,对汽车电子稳定控制系统进行研究。
二、系统概述汽车电子稳定控制系统主要由传感器、执行器、控制器三部分组成。
传感器负责检测汽车的行驶状态,执行器负责执行控制指令,而控制器则是整个系统的核心,负责接收传感器数据、处理数据并发出控制指令。
STM32微控制器作为控制器的核心,其强大的处理能力和丰富的接口资源,使得系统能够实时、准确地处理各种传感器数据,并发出精确的控制指令。
三、系统工作原理汽车电子稳定控制系统的工作原理主要基于传感器数据和算法控制。
系统通过传感器实时获取汽车的行驶状态数据,如车速、转向角度、侧向加速度等。
然后,STM32微控制器根据这些数据,结合预设的算法,计算出最佳的车辆控制策略。
最后,通过执行器对车辆进行精确的控制,使车辆在行驶过程中保持稳定。
四、系统硬件设计系统硬件设计主要包括STM32微控制器及其外围电路的设计。
STM32微控制器作为核心部件,负责接收传感器数据、处理数据并发出控制指令。
此外,还需要设计电源电路、通信电路等外围电路,以保证系统的正常工作。
在硬件设计过程中,需要考虑系统的可靠性、抗干扰能力等因素,以确保系统在恶劣的汽车环境下能够稳定工作。
五、系统软件设计系统软件设计主要包括STM32微控制器的程序设计。
程序需要实现传感器数据的采集、处理、控制指令的发出等功能。
在程序设计过程中,需要采用高效的算法和优化技术,以提高系统的处理速度和准确性。
此外,还需要考虑程序的可靠性和稳定性,以确保系统在各种情况下都能正常工作。
基于STM32的汽车档位角度传感子系统的设计与实现
假设从陀螺仪读 出的角速度为w,那总角度为 : x - ( w1 。  ̄ t l + w 2 t 2 + w3 t 3 ) / 1 0 0 0 假设经过_ 1 1 次 ,那么总 的角度如 下:
X f w1 t l + w2 t 2 + w3 t 3 + …十 l Ⅳ n m) / 1 0 0 0 实际上这就是一个积分过程 。
其实这种计 算出来 的角度 也存在一定 的误差 ,而且 总 的角
度是经 过多次相加 得到 的,这样 误差就会越 积累越大 ,最终导
致计算 出的角度 与实际角度相差 很大 。于是使 用卡尔曼 滤波把 加速度计读 出的角度结合在一起 ,使计算出的角度更准确 。
3 . S T M3 2 软件模块的功能实现
角度信 息输 出到微型处理器上 。
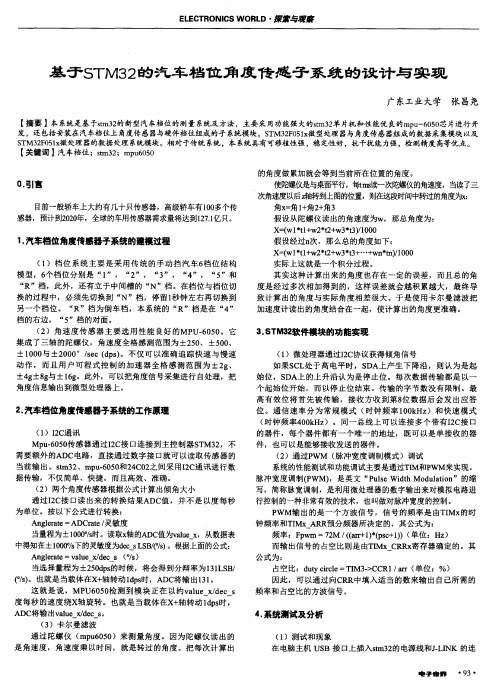
2 . 汽车档位角度传感器子系统的工作原理
( 1 )I 2 C 通讯 :
Mp u - 6 0 5 0 传感器通 过I 2 C 接 口连接 到主控制 器S T M3 2 ,不
需要额外 的ADC电路 ,直接通 过数字接 口就可 以读取传感器 的 当前输 出。s t m3 2 、mp u - . 6 0 5 0 和2 4 C 0 2 之间采用I 2 C 通讯 进行数 据传 输,不仅 简单、快捷 ,而且 高效 、准确 。 ( 2 )两个角度传感器根据公式计算 出倾角大小
( 1 )微处理器通过J 2 C 协议获得倾角信号
集 成 了三轴 的陀螺仪 ,角速度全格 感测范 围为 ±2 5 0 、 ±5 0 0 、 ±1 0 0 0 与 ±2 0 0 0 。/ s e c( d p s ) 。不 仅可 以准确 追踪快 速与 慢速 动 作 ,而且 用 户可 程式 控制 的加 速器 全格 感测 范 围为 ±2 g 、
基于STM32的驾校车辆位置检测系统设计
基于STM32的驾校车辆位置检测系统设计
杨杰鹏;郑铧坚;冯杰年;陈俊杰
【期刊名称】《信息通信》
【年(卷),期】2018(000)010
【摘要】为提高驾校学车培训的质量和效率,如今的驾校普遍都安装了可运行于手机或电脑上的远程指导系统,文章设计了一套支持该系统运行的车辆位置检测子系统.该系统以STM32F103ZET6单片机为核心,通过ZigBee构建无线网络进行通讯,集数据采集及处理、语音播报提醒和电脑上位机可视化系统于一体.系统的设计和应用将提高驾校的培训效率和输送素质过硬的驾驶员,减少交通事故的发生,具有很好的市场应用价值.
【总页数】3页(P54-56)
【作者】杨杰鹏;郑铧坚;冯杰年;陈俊杰
【作者单位】韶关学院物理与机电工程学院,广东韶关 512000;韶关学院物理与机电工程学院,广东韶关 512000;韶关学院物理与机电工程学院,广东韶关 512000;韶关学院信息科学与工程学院,广东韶关 512000
【正文语种】中文
【中图分类】TP368.1
【相关文献】
1.基于Cortex-A8的驾校车辆位置检测系统的设计 [J], 胡永华;杨杰鹏;陈俊杰
2.基于多地磁传感器的车辆位置检测系统设计 [J], 冯宇航;王建;蔡尧;高峰;赵菲
3.基于STM32单片机的车辆胎压监测系统设计 [J], 刘亮;孟德强
4.基于STM32的复合便携式车辆应急启动电源的系统设计 [J], 杨忠亮;林龙福;李晓波;林海;佘楚云;吴杰
5.基于stm32的车辆调试自动控制系统设计 [J], 胡可狄;于亚利;李帅;李志峰;王昆因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Vo 1 . 2 3
电 子 设 计 工 程
El e c t r o ni c De s i  ̄ n En  ̄ i n e e
2 0 1 5年 3月
Ma r .2 01 5
No . 6
基于 S T M3 2的 自动档 位检 测 系统设计
于超 然 ,刘 宇 男 , 付 成伟
Ab s t r a c t :B a s e d o n t h e p u r p o s e o f t h e I n t e l l i g e n t v e h i c l e i n d u s t r y ,a k i n d o f a u t o ma t i c t r a n s mi s s i o n b i t S T M3 2 - b a s e d d e t e c t i o n s y s t e m,t h e s y s t e m c o mb i n e s t h e r o t a r y e l e c t i r c c a r s h i f t g e a r l o c k i n g d e v i c e a n d P - L o c k s a f e t y d e v i c e , d e t a i l i n g t h e h a r d w a r e d e s i g n i d e a s a n d i mp l e me n t a t i o n f u n c t i o n s , a n d e x p o u n d e d t h e s o f t wa r e p r o c e s s e s . B y u s i n g t h e c u r r e n t s y s t e m mo r e
优越性 , 它 是 由变 速 箱 电 子 控制 器 根 据 汽 车运 行 状 态 自动 完
成换 挡 功 能 . 使开车变得简单 、 省 力 且 自动 切 换 速 度 柔 和 、 平 稳 , 乘 坐 与 驾 驶感 觉舒 适… 。 在西 欧 日益广 泛 地 采 用 自动 变 速
1 系统 总体 架 构 设 计
c o mmi s s i o n i n g v e h i c l e t o a c h i e v e a n i n t e l l i g e n t s h i t f o p e r a t i o n a n d t h e t r a n s mi s s i o n o u t p u t s h a f t l o c k f u n c t i o n . Ap p l i c a t i o n o f
挡 操 作 与 变速 器输 出轴 锁 止 功 能 。 自动 档位 检 测 系 统 的 应 用使 车辆 拥 有 更 为 出 色的 换 档 舒 适 性 与 经 济 性 , 并 与 整 车
智 能 化接 轨 。
关 键 词 :自动 变速 箱 ;霍 尔效 应 ; S T M 3 2 ; C A N 中图 分 类 号 : T N 一 9 文 献标 识 码 : A 文 章 编 号 :1 6 7 4 — 6 2 3 6 ( 2 0 1 5 ) 0 6 — 0 1 1 8 — 0 3
是 C A N 总线 技 术 已 经 得 到 广 泛 应 用 ,总 线 技 术 的 发 展 和 在
箱 和 新 的低 燃 料 消 耗 的需 要 而 对 变 速 箱 电子 控 制 系 统 的 要 求 大 大 增 加 。换 挡 点 的 控 制 和 程 序 的 自动 变换 的设 计 是 它 的
一
个 主要要素t 2 1 。 随 着 汽 车 电 子 化 程 度 的进 一 步 提 高 和 微 电
a u t o ma t i c g e a r t h e v e h i c l e d e t e c t i o n s y s t e m h a s mo r e e x c e l l e n t c o mf o r t a n d e c o n o my,a n d i n t e l l i g e n t i n t e g r a t i o n w i t h t h e
P档 则 发 送 解 锁命 令 , P档 锁 止 安 全 装 置 进 行 相 应 的操 作 。 旋
转式 电控 换挡 装 置还 接 收 着 V C U发 出 的信 息 , 根 据 信 息 做 出相应 的动 作 , 如 点 亮 对 应 档 位 的 指 示 灯 或 点 亮 旋 钮 背
光 灯 .
De s i g n o f a u t o ma t i c g e a r d e t e c t i o n s y s t e m b a s e d o n S TM 3 2
YU C h a o — r a n ,L I U Yu — n a n 。 ,F U C h e n g - we i
自动档 位 检 测 系统 包 含 了汽 车 旋 转 式 电 控 换 挡 装 置 与 P
档锁止安全装置 , 汽 车 旋转 式 电 控 换 挡 装 置 位 于传 统 换 挡 杆 的位置 , P档 锁 止 安 全 装 置 位 于 变 速箱 上方 。 系统 的总 体 架 构 设计如图 l 所示 。 旋 转 式 电控 换 挡 装 置 与 车 辆 控 制 单 元 V C U 以C A N通 信 方 式 进行 通 信 。在 现 代 汽 车 上 , 总线技术 , 特 别
v e hi c l e . Ke y wo r ds :a u t o ma t i c t r a ns mi s s i o n;Ha l l Ef f e c t ;S TM 3 2;CAN
目前 自动 变速 箱 在 国 内外 轿 车 中应 用 很 广 . 具 有 很 大 的
要 方 向
档 位 信 息 发 送 到 车辆 控 制 单 元 V C U,报 告 当前 的档 位状 态 .
然 后根 据档 位 切 换 情 况 向 P档 锁 止 装 置 发 送 指 令 。 若 档 位 从 非 P档 切 换 到 P档 即发 送 锁 止命 令 , 若 档 位从 P档 切 换 到 非
翠
匝
—ห้องสมุดไป่ตู้
—
—
—
—
一
点亮相应 档位指示灯
生变化时 . 通过霍尔传感器检测然后经 由 S T M3 2 微 处 理 器 处 理, 获得 当前的档 位信息 , 控 制 对 应 档 位 指 示 灯 与 旋 钮 背 光 灯, 并保持着 与 V C U和 P档 锁 止 安 全 装 置 的 通 信 。
收 稿 日期 : 2 0 1 4 — 0 6 — 0 4
l l 8 一
稿件编号 : 2 0 1 4 0 6 0 2 1
作者简介: 于超 然 ( 1 9 9 0 一) , 男, 吉 林 长春 人 , 硕 士 研 究 生 。研 究 方 向 : 汽 车 电子 与 电子 控 制技 术 。
一
于超 然 . 等
线提供了技术保证1 4 ] 。 旋 转 式 电 控 换 挡 装 置 首 先 将 检 测 到 的
装 备 了 自动 变 速 器 ,日本 达 到 7 0 % .欧 洲 发 达 国家 也 已达 到3 0 %一 4 0 %『 引 。 本 文 以 此 为 背景 . 介绍一种基 于 S T M3 2的新 型 自动 档 位 检 测 系统 . 该 系 统 采 用 了 当前 较 为先 进 的 无 接 触 式电子检测技术 , 降 低 了成 本 .更 重 要 的 是 无 接 触 式 的检 测 方法 提 高 了整 车 系 统 的 可靠 性 与 安 全 性 。目前 这 方 面 的研 究 与应 用 越 来越 多 ,已经 成 为 当 前 汽 车 电子 技 术 发展 的一 个 重
a d v a n c e d c o n t a c t l e s s e l e c t r o n i c d e t e c t i o n t e c h n o l o g y t o r e p l a c e t h e t r a d i t i o n a l s h i f t e r ,t h r o u g h t h e e n t i r e s y s t e m a n d j o i n t
子技术的迅速发展 , 现 有 传 统 换 档 器 以机 械 拉 锁 进 行 档 位 切
换 和 变 速 箱 上 的 P档 锁 止 安 全 位 置 以 机 械 拉 锁 进 行 切 换 的
方式 已 逐 渐 脱 离 整 车 智 能 化 。在 美 国 8 O % 以 上 的 工 程 车 辆
燃 油 汽 车 上 积 累 的 丰 富 经验 ,为 在 电 动 汽 车 上 应 用 C A N 总
换 挡 装 置 与 P档 锁 止安 全 装 置 . 详 细 介 绍 了装 置 的 硬 件 设 计 思 想 与 功 能 的 具 体 实现 , 并 阐述 了软件 流程 。 系统 通 过 采
用 3前 " - 较 为先 进 的 无接 触 式 电 子 检 测 技 术 . 替代 了传 统 换 档 器 , 并 通 过 整 套 系统 与 整 车 的联 合 调 试 实 现 了智 能化 换
基于 S T M 3 2的 自动 档位检 测 系统设 计
旋 转式电控换挡装 置上电
C A N
初始化
读 取 止 装 置 I 申 I 量 堡 : 垦 l < 匙 门 状 ) - ] 否
向V C U 发送档位信息
图1 系统 总 体 架 构 设 计 流 程 图
Fi g .1 r I ’ h e a r c h i t e c t u r e o f e n t i r e S y s t e m lo f w c h a r t
2 旋 转 式 电控 换 挡 装 置 设 计
2 . 1 检 测 原 理 与 硬 件 设 计 旋 转 式 电控 换 挡 装 置 设 计 流 程 图 如 图 2所 示 , 当 档 位 发