焊接机器人应用技术在积淀中强大——首钢莫托曼机器人有限公司机器人弧焊技术开发应用综述
焊接机器人工作站简介
焊接机器人工作站简介首钢莫托曼机器人有限公司(SGM)是专门从事工业机器人及其自动化生产线设计、制造及销售的中日合资公司。
公司成立于1996年8月23日,注册资金700万美元,由首钢总公司(45%)、日本株式会社安川电机(43%)和日本岩谷产业株式会社(12%)共同投资,总部位于北京经济技术开发区。
SGM主营日本安川MOTOMAN系列机器人产品,广泛应用于弧焊、点焊、涂胶、切割、搬运、码垛、喷漆、科研及教学。
安川新推出的洁净机器人和双臂机器人是MOTOMAN机器人的开拓性产品,SGM今后会不断推出更多高性能、高精度、高可靠性的新型MOTOMAN机器人。
SGM的产品遍布汽车、摩托车、家电、烟草、陶瓷、工程机械、矿山机械、物流、铁路机车等诸多行业。
为促进企业发展、提升行业知名度,SGM每年都会参展多个大型行业应用展会,SGM拥有一批优秀的工程设计、项目调试人员,在机器人工作站及各种大中型机器人自动化系统生产线的研发、制造、调试及运行维护等方面具有成熟经验和较高水平,在应用技术上获得了多项国家专利。
SGM在不断发展壮大的过程中不断提高系统设计的精准性,这大大提高了系统设备的使用可靠性。
机器人本体专门为点焊而设计,其上臂内藏点焊用的电缆,气管与水管,它与高性能NX100控制柜及配备6.5”LCD彩色显示触摸屏的示教盒的结合,使MOTOMAN-ES系列机器人极大程度地完善了点焊系统。
NX100可同时协调控制多达36个轴,可以实现机器人6轴+电动点焊钳1轴+行走轴1轴,可四台点焊机器人单元的同时协调动作。
并且,由于控制柜命令的运行数度提高1倍从而缩短了作业周期。
有负载重量为165KG到200KG达到了机械人精度运动的最大承重量。
机器人运用高精度控制算法缩短了命令响应的滞后时间,它是安川独有的“高级机器人动作(ARM)”控制特点之一。
因此,机器人的诡计重复精度可以提高50%。
误差补偿功能(选项)使机器人绝对位置精度提高2到5倍。
焊接机器人的关键技术与应用

焊接机器人的关键技术与应用自动化技术的快速发展和机器人技术的成熟应用,极大地推动了制造业的进步。
焊接机器人技术作为一种高效、准确、可控的自动化加工手段,在现代制造业中得到广泛应用。
本文旨在深入探讨焊接机器人的关键技术和应用,为读者科学理解焊接机器人技术提供帮助。
一、焊接机器人的概念和发展焊接机器人,是一种由计算机和执行机构构成的自动化工具,可在工业制造中自动进行焊接作业。
焊接机器人的发展可以追溯到上世纪50年代,随着工业制造的不断推进,特别是汽车工业和机械制造业的发展,焊接机器人逐渐成为工业自动化的主要领域之一。
随着电子技术和计算机技术的不断发展,焊接机器人技术也得到了快速发展。
现代焊接机器人不仅在机械结构和控制系统上得到了不断提升,同时在感知技术和智能控制方面也有了很大的开拓。
二、焊接机器人的技术特点1. 多轴控制系统:现代焊接机器人多采用3~6轴控制系统,使其可以精准地控制焊接头的位置和角度。
2. 多种焊接方法:焊接机器人可以采用多种焊接方法,如TIG、MIG、MAG、钎焊等,实现各种焊接需求。
3. 多种时间协同技术:现代焊接机器人还可以配合多种时间协同技术,如时间切换、协同操作等,实现高效、精确的焊接作业。
4. 自适应控制技术:通过传感器获取工件和焊接头的信息,对焊接参数进行实时调整,提高焊接质量和效率。
5. 智能控制和模拟技术:通过在计算机上建立焊接模型和仿真模型,对焊接过程进行预测和优化,提高了焊接质量和效率。
三、焊接机器人的应用领域1.汽车制造业:汽车制造业是焊接机器人的主要应用领域之一,大量焊接机器人在汽车车身、底盘和发动机等部件的加工中得到了广泛应用。
2. 机械制造业:机械制造业也是焊接机器人的主要应用领域之一,焊接机器人在各种机械部件、构件的加工和组装中具有良好的适用性。
3. 船舶制造业:焊接机器人在船舶制造业中也得到了广泛应用,能够实现大型钢结构和管道的高效焊接。
4. 管道焊接:管道焊接需求量较大,焊接机器人可以大大提高焊接的质量和效率,节省人力资源。
工业机器人技术在钢铁行业的应用

工业机器人技术在钢铁行业的应用钢铁行业一直以来都是国民经济的重要支柱产业,其生产过程复杂且环境恶劣。
随着科技的不断进步,工业机器人技术在钢铁行业中的应用越来越广泛,为提高生产效率、提升产品质量、保障生产安全等方面发挥了重要作用。
在钢铁生产的各个环节,都能看到工业机器人的身影。
比如在炼铁环节,高炉炉前作业是一项高温、高粉尘、高强度的工作。
传统的人工操作不仅劳动强度大,而且工作环境恶劣,对工人的身体健康构成威胁。
工业机器人的应用有效地解决了这一问题。
机器人可以进行自动开铁口、堵铁口等操作,不仅提高了作业的精度和稳定性,还减少了工人在恶劣环境中的暴露时间。
炼钢环节同样离不开工业机器人。
在转炉炼钢中,机器人可以进行测温、取样等操作。
通过精确的控制,机器人能够准确地获取钢水的温度和成分等信息,为炼钢工艺的优化提供了数据支持。
在连铸环节,机器人可以进行铸坯的切割、去毛刺等工作,提高了铸坯的质量和生产效率。
在轧钢环节,工业机器人的应用更是大大提升了生产的自动化水平。
例如,在钢板的轧制过程中,机器人可以进行钢板的搬运、翻面等操作,减少了人工干预,提高了生产的稳定性和一致性。
在钢材的精整环节,机器人可以进行表面质量检测、修磨等工作,有效地提高了钢材的表面质量。
工业机器人在钢铁行业中的应用,带来了诸多显著的优势。
首先是提高了生产效率。
机器人能够快速、准确地完成重复性的工作,而且可以实现 24 小时不间断作业,大大缩短了生产周期。
相比人工操作,机器人的动作更加迅速和精准,减少了生产中的停顿和等待时间。
其次是提升了产品质量。
工业机器人的操作精度高,能够严格按照设定的工艺参数进行作业,从而有效地减少了人为因素对产品质量的影响。
在对产品质量要求越来越高的市场环境下,这一优势显得尤为重要。
再者是保障了生产安全。
钢铁生产现场存在高温、高压、有毒有害气体等危险因素,工人在这样的环境中工作面临着较大的安全风险。
工业机器人可以替代工人完成一些危险的作业,降低了事故发生的概率,保障了工人的生命安全。
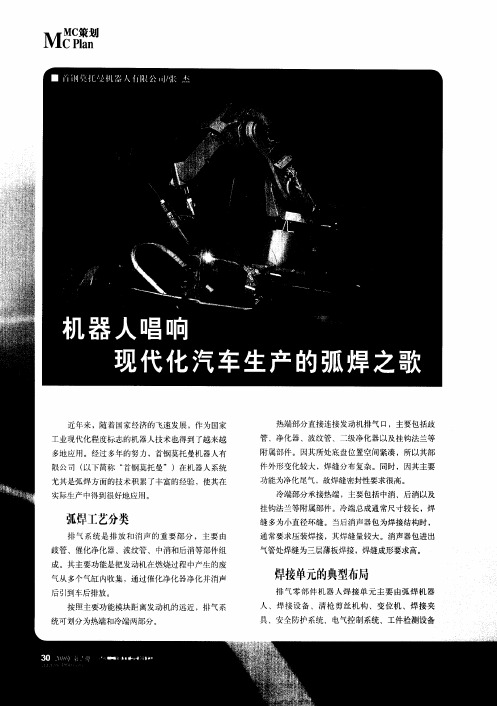
机器人唱响现代化汽车生产的弧焊之歌
世 。S A 00 S 20 在保持E 10 结构优势的基础上大幅 A 40 提高 了轴动作速 度 ,单轴 速度 同比最大提 高4 %, 0 焊接速 度最大可 同比提高 1%,成 为世界最快 的弧 5
焊机器人之一 。 2 0 年底 ,安 川公司又推 出了新 一代机器人控 08 制器DX1 0 0 ,同时将S A 0 0 S 2 0 机器人升 级为世界第
弧焊工艺分类
排 气 系统 是 排放 和 消声 的重 要部 分 ,主 要 由
缝 多为小直径环缝 。当后消声器包为焊接 结构时 , 通 常要求压装焊接 ,其 焊缝量较大 。消声器包进出
歧管、催化净化器、波纹管、中消和后消等部件组
成 。其主要功 能是把发动机在燃烧 过程 中产生的废
气管处焊缝为三层薄板焊接 , 焊缝成形要求高。
一
4半壳类消声器大包焊接 单元布 局 .
半 壳类 消 声器 大 包在 焊接 过 程 中需 要加 压 力
8k 以上 ,需要使用可安 装液 压模具 的特殊双轴变 0N
位机实现焊接 。
台七轴弧焊专 用机 器人MO TOMAN—V 4 0 A1 0 。
5冷端总成焊接单元布局 .
排 气 系统 冷 端总 成 工件 通 常 由法 兰 、进 出 气
气从 多个 气缸 内收集 ,通过催化 净化器净化并消 声
后引到车后排放。
焊接单元的典型布局
排 气零部 件 机 器人 焊接 单 元主 要 由弧焊 机 器 人 、焊 接 设备 、清 枪 剪丝 机构 、变 位机 、焊 接 夹
按 照主要 功能模块距离发动机 的远近 ,排气 系
统可划分为热端和冷端 两部 分。
简单 ,同时 大大增强 了焊 枪的可达性 。该机器人一 经推出 ,便迅 速在汽车车 桥 、消声器等排 气系统零 部 件以及座椅骨 架等焊接领 域受到 了好评 。多家焊
MOTOMAN洁净机器人及系统介绍.

在 20世纪九十年代,伴随着 IT、家电等行业的迅猛发展,洁净机器人面世了。
近几年,半导体、液晶显示器、等离子显示器、计算机硬盘的规格与产量不断提高, 导致生产过程中工件的体积和重量越来越大,生产节奏、生产工艺性的要求也越来越高。
短短十余年间,液晶显示器的产品已经发展到第 8代,玻璃基板尺寸增大了将近十倍, 这就对洁净机器人性能提出了更高的要求。
而且, 相比于传统用途的机器人, 如弧焊、点焊、喷涂等,洁净机器人需要更快速的响应来满足不断提升的性能要求。
作为世界上最先进的机器人厂家,安川公司对于这一机器人的新兴应用领域,很早就给予了关注。
从一开始, 在产品开发、系统整合及市场开拓等方面, 就投入了巨大的力量。
由于安川在机器人技术和产品开发的雄厚实力,在洁净机器人的产品及应用技术研究上迅速取得了进展。
目前, 安川的洁净机器人技术及市场竞争能力,在国际上处于遥遥领先的地位, 市场份额超过60%。
前不久在东京举行的国际机器人展览会上,推出了可适应当前最新型液晶生产的第八代产品需求的大型洁净机器人, 受到业内人士的瞩目。
MOTOMAN 洁净机器人,控制器采用 MOTOMAN 的 XRC 控制器,而机械结构则结合生产工艺的特点, 主要分为两大系列, 既CSL系列和CR系列。
CR 系列是垂直多关节机器人, 进行全姿态动作运动 ; CSL是水平直线及回转运动型机器人, 高速度高精度,动作快捷准确。
当前大量使用的洁净机器人,以水平动作的机器人居多,因为在工厂里,主工艺装置之间的玻璃基板传送,基本都是平面进行。
图 1 ̄图4是 MOTOMAN的几种主要形式洁净机器人的机型。
现以典型的液晶生产线为例,介绍 MOTOMAN 洁净机器人的使用情况。
如图所示,从玻璃原材料进入生产线到产品的出线,玻璃基板要通过一系列的工艺处理过程。
在生产线各工艺处理设备之间,玻璃基板的运送与上下料,都需要洁净机器人来完成。
玻璃基板由专用的装运箱送至生产线入口处,在那里设置了取出单元M O T O M A N洁净机器人及系统介绍首钢莫托曼专刊图1CSL1200图2CSL1200D 图3CSL10-30021机器人技术与应用22机器人技术与应用(UNPACKER 。
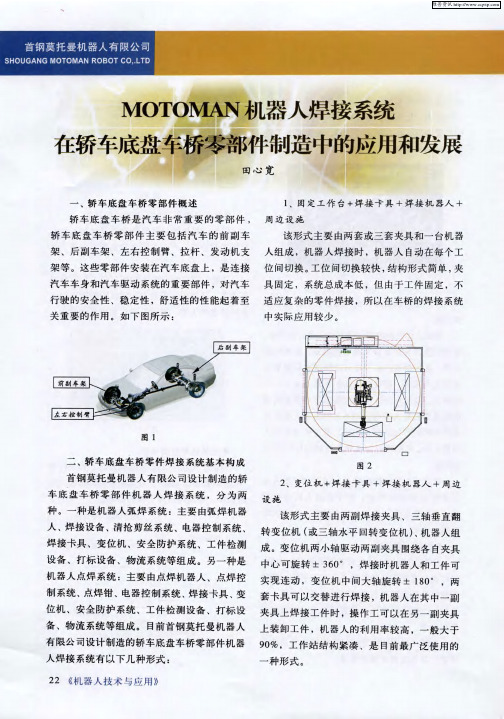
MOTOMAN机器人焊接系统在轿车底盘车桥零部件制造中的应用和发展
M OTOM A N
机 器 人 焊 接 系统
田 心
在轿 车底 盘 车桥 零 部 件 制 造 中 的 应 用 和 发 展
宽
固 定 工 作 台 + 焊接 卡 具
一
、
轿 车底盘 车桥 零 部件 概述
,
1
、
+
焊接 机 器 人
+
轿车 底盘 车桥 是 汽 车非常重 要 的零部 件
图 3
3 、搬 运 机 器人 +焊 接 机 器人 +定位 卡 具 +
周 边 设施
l 茎 5 l
5 、弧 焊 机 器 人 +点 焊机 器人 +搬 用机 器人 +焊接 卡 具 +周 边 设 施
该 形 式 主 要 由多 组 焊 接 工 作 站 单 元 、 多组
ll4 茎
搬 运 机 器人 、多 条 自动输 送 线 、 自动 检 测 等 设
、
三 轴垂直翻
、
、
焊接设 备
、
清抢 剪 丝 系统
、
、
电器 控制 系统
、
、
转 变 位机 (或 三 轴 水 平 回 转变 位机 ) 机 器 人 组
焊 接 卡具 设备
、
变位 机
、
安全防护 系统
工 件检测
成
。
变 位 机 两 小 轴 驱 动 两 副 夹 具 围 绕 各 自夹 具
± 36 0
。
打标设 备
物流 系 统 等组 成
M OTOM AN— 6 N 机 器 人 , 焊 机 器 人 ES1 5 弧 MOTOMAN— EA1 0 N 机 器 人 , 90 MOTOMAN—
E 40 A10 N机 器人 。 非标设备实施了模块化 、系 列化 ,先后推 出了 2 多项焊接卡具设计标 准 , 0 3 项焊接变位机设备标准 ,2 项安全防护标 准 ;
焊接机器人的发展及其在汽车工程实际中的应用

5科技资讯科技资讯S I N &T NOLOGY I NFORM TI ON 2008NO .08SC I ENCE &TECH NO LOG Y I NFOR M A TI O N 高新技术1机器人的构造及分类机器人是一种在生产中能灵活完成特定操作,并有多种功能的机器。
机器人一般由以下几部分组成:控制系统,驱动系统,执行(运动)装置,检测系统。
机器人的控制系统包括:控制电脑和伺服控制器。
机器人的动力驱动主要有:电动、气动、液压驱动等。
机器人的执行(运动)部分主要指机器人用于完成任务的机体装置,主要由机械传动系统和末端执行器组成。
传动机构用于把驱动器产生的动力传递到机器人的各个关节和动作部位,实现机器人平稳运动。
常见的传动机构有以下几种:a 、齿轮传动b 、丝杠传动机构c 、皮带传动和链传动机d 、流体传动e 、连杆传动:机器人的检测系统是指机器人身上的各种传感器。
机器人最常采用的基本传感器有:视觉传感器、力觉传感器、触觉传感器、位移传感器、速度传感器、加速度传感器等。
传感器是机器人的感觉器官,机器人工作时,电脑根据传感器获得的信息控制机器人动作。
它主要分为内部传感器和外部传感器两大类。
工业机器人是一种能自动控制、可重复编程、具有多功能、多自由度的操作机,是机器人家族中最重要的成员,主要由机械手臂、控制装置、机座、能源装置和驱动装置等几部分构成。
从结构上分为:模仿人类关节结构的关节型工业机器人、直角坐标型机器人、圆柱坐标型机器人、球坐标机器人。
从用途上可分为:焊接机器人、机器加工机器人、装配机器人、喷漆机器人、检查、测量机器人、移动式搬运机器人等等。
焊接机器人主要包括弧焊机器人和点焊机器人。
有用于大工件焊接的大型焊接机器人,也有用于小工件焊接的精巧小型焊接机器人;有单台操作,也有两台以上的组合操作。
2国内外工业机器人的发展历程美国是最早出现工业机器人的国家,1959年美国Uni m a t i on 公司推出第一台工业机器人。
首钢莫托曼埃森展上亮点多

合而 成 ,其 中包 括MO OF O 器人 一 机 电源接 口 T R 机 焊 技 术 ,可 以 对 焊 机 进行 精 细 控 制 ,实现 冷金 属 过 渡
( MT)的焊接方法 。 C 利用MO OF O接 口,可以对焊机进行各种工艺参 T R
焊缝焊接姿态 的优化 以及焊缝的连续焊接很有帮 助。机 器人安装 于一单轴 变位 机上 ,最大限度的体现 了机 器人 紧凑布置 ,优化焊接的技术理念 。 ( )车身点焊 系统 3 这 套点焊机 器人 系统 ,用十
新一代机 器人I 0 A2 。该机器人有7 A由度 ,具有很好 个
的动作灵活性 ,可以完成各种复杂的动作 ,适合在狭小
进行P OFB 、C I R I US CLNK、M— E N T、DE C — T、 VI E NE 的MA1 0 机 器 人和奥 地 利福尼 斯 公 司的最 新焊 机配 40
E H R E 以及ME H T I 通信 。其特点如下 : T E NT C A OLNK ( ) 双 机 协 调 弧 焊 系 统 焊 接 工 作 使 用 的 1 MOT OMAN的多轴控制机 器人应用 系统 , 目前单控 制 器可以达到 同时控¥ 7 个轴 的水平 ,同时对8 | 12 个机 器人
Eh i Rp I展会报道 xit eo bi o
I ■ ●● ● ■■ ■■ ■ ■■ ■■ ■ ●● ■■ 一 ■
首钢莫托曼 埃森展上亮点多
首钢 莫 托 曼机 器 人 有 限 公 司 袁 军 民
首钢 莫托 曼是 国 内最具 规模 的专 业机 器人 及 系统
公司 ,其销售 的MOTOMAN机器人及焊 接系统具 有 国
际领 先水平 。在2 1年 的北 京・ 00 埃森焊 接展上 ,主要 展 示 了新一代 的DX10 0 机器人 ,在该机器人示教盒 上集 成
焊接机器人简史
焊接机器人的发展可以追溯到20世纪60年代。
以下是焊接机器人的简史:
1960年代:焊接机器人的起源可以追溯到1960年代初期。
当时,美国的工业界开始探索自动化焊接技术,试图解决手工焊接的劳动密集和效率低下的问题。
1962年:美国的工业自动化公司Unimation开发出了世界上第一个商业化焊接机器人,称为"Unimate"。
它是一种基于传感器和控制系统的大型机器人,可以执行焊接任务。
1970年代:焊接机器人在70年代进一步得到发展和应用。
随着计算机技术的进步,焊接机器人的控制系统变得更加精确和灵活,可以进行更复杂的焊接操作。
1980年代:80年代是焊接机器人技术快速发展的时期。
焊接机器人开始广泛应用于汽车制造、航空航天和其他工业领域,取代了部分手工焊接工作,提高了焊接质量和生产效率。
1990年代至今:随着信息技术和自动化技术的不断进步,焊接机器人的功能和性能得到了进一步提升。
新的传感器和控制系统使机器人能够更精确地感知和执行焊接任务,并实现更高的自动化水平。
现代的焊接机器人通常具有高精度、高速度和可编程的特点。
它们可以在复杂的焊接工艺中执行多种焊接方法,如弧焊、激光焊、激光-电弧混合焊等。
焊接机器人的应用范围广泛,包括汽车制造、船舶制造、金属加工、建筑结构等领域。
总体而言,焊接机器人经过多年的发展和技术进步,已经成为现代工业中不可或缺的重要工具,为生产和制造过程带来了效率和质量的提升。
国内外工业机器人公司介绍
国内外工业机器人厂商在国外,工业机器人技术日趋成熟,已经成为一种标准设备而得到工业界广泛应用,从而也形成了一批在国际上较有影响力的、著名的工业机器人公司,主要包括:瑞典的ABB Robotics,瑞士Staubli公司,日本的FANUC、Yaskawa,德国的KUKA Roboter,美国的Adept Technology、American Robot、Emerson Industrial Automation、S-T Robotics,意大利COMAU,英国的AutoTech Robotics,加拿大的Jcd International Robotics,以色列的Robogroup Tek公司,这些公司已经成为其所在地区的支柱性企业。
在国内,工业机器人产业刚刚起步,但增长的势头非常强劲。
如中国科学院沈阳自动化所投资组建的新松机器人公司,年利润增长在40%左右。
1国外主要机器人公司1.1 瑞典ABB Robotics公司ABB公司是世界上最大的机器人制造公司。
1974年,ABB公司研发了全球第一台全电控式工业机器人-IRB6,主要应用于工件的取放和物料的搬运。
1975年,生产出第一台焊接机器人。
到1980年兼并Trallfa喷漆机器人公司后,机器人产品趋于完备。
至2002年,ABB公司销售的工业机器人已经突破10万台,是世界上第一个突破10万台的厂家。
ABB公司制造的工业机器人广泛应用在焊接、装配、铸造、密封涂胶、材料处理、包装、喷漆、水切割等领域。
公司网址:/robotics1.2 瑞士Staubli公司史陶比尔将其在机械运动控制方面的经验和优势应用在工业机器人上。
先成功开发并生产了以坚固、可靠和修正尺寸而著称的TX、RX系列机器人手臂后,又拥有了高速、精确、安全的新一代SCARARS系列工业机器人。
史陶比尔现在的工业机器人与过去相比,具有更快的速度,更高的精度,更好的灵活性和更友好的用户环境。
分析和评价机器人工程领域新产品、新技术、新工艺的开发

分析和评价机器人工程领域新产品、新技术、新工艺的开发机器人是衡量现代科技和高端制造业水平的重要标志,是制造业皇冠顶端的明珠。
作为引领世界将来的颠覆性技术,机器人正在制造新产业新业态,推动生产和消费向智能化转变,进而深刻影响人类生产和生活。
世界上很多国家,包括发达国家和一些新兴经济国家,例如,美国、欧盟、日本、韩国等,纷纷将机器人作为国家方案进行重点规划和部署。
机器人系统以功能及系统实现为载体,通过自主或半自主的感知、移动、操作或人机交互,体现类似于人或是生物的智能水平;它能够扩展人在尺度、时间、空间、环境、情感、智能以及精度、速度、动力等方面所遭到的约束和限制,并为人服务。
中国作为世界最大的机器人消费国,除了工业机器人连续 5 年成为世界最大的市场外,服务机器人的需求也增长显著。
各种各样为了满足不同需求的特种机器人、康复与助老助残机器人、医疗协助机器人等服务机器人,正在成为推动机器人产业进展的新动力。
次要成果1. 仿人机器人技术不断突破,进入了国际领先行列仿人机器人技术是智能机器人争辩的热点,也是一个国家机器人争辩水平的标志。
20 世纪90年月初到2000年,我国先后研制出多指关节灵活手、双足步行机器人和仿人机器人“先行者”,渐渐缩小了我国仿人机器人争辩与世界先进水平的差距。
“十五”期间,我国自主开发了仿人机器人“汇童”,标志着我国成为继日本之后其次个把握集机构、把握、传感器、电源等于一体的仿人机器人技术的国家。
“十一五”期间,我国研制出国际领先水平的五指灵活手,实现了对多种外形物体的识别、抓取和自主操作;攻克了仿生气器人动力学稳定把握、高功能手臂一体化部件设计制造、自主实时把握操作系统研发、高速视觉识别算法等核心技术,实现了具有高度感知与运动把握力量的仿人机器人乒乓球对抗,保持了国际领先地位。
2. 从6000米无缆自治机器人到7000米载人深潜器,水下机器人取得严重成就海洋资源勘探和开发是国际激烈竞争的焦点问题之一,水下机器人是海洋资源勘探和开发的重要工具。
2022-2024北京重点校高二(下)期末语文汇编:选择简答

2022-2024北京重点校高二(下)期末语文汇编选择简答一、选择简答1.(2024北京通州高二下期末)阅读下面文字,完成下列小题。
①传统村落是文化遗产的重要..载体和富集地。
②“对传统村落的保护应该超越单纯的经济考量,对其精神和历史文化价值充分....,他指出:“传统村..的给予..珍视。
”③冯骥才先生一直为传统村落的保护奔走相告落中蕴藏着丰富的历史信息和文化景观,是中国农耕文明留下的最大遗产。
”④同时他也说,随着社会的发展,一些村落自然解体或消失,村落的原始性以及吸附其上的文化性正在分崩离析....。
⑤伴随着村落实体的消失,农耕文明见证、乡土古老建筑和留存乡间的传统习俗也逐渐消失,“乡愁”失去了寄托。
(1)下列说法不正确...的一项是()A.①句中的“重要”不可改为“主要”。
B.①句中的“给予”应放在“充分”前。
C.①①句中两个加点成语使用不当。
D.①句中三个画线句不可调换顺序。
(2)根据以上内容,为传统村落下定义。
将答案写在答题卡上。
2.(2024北京昌平高二下期末)语言基础运用。
①近年来,居庸关长城不断拥抱潮流、紧跟时尚,让古老关城呈现..出年轻的一面。
②在23年8月的北京长城国乐大典,9月的国际青年设计师邀请赛时尚盛典之后,24年“五一”假期居庸关长城再次迎来备受游客期待的“点灯”时刻。
③高悬“天下第一雄关”牌匾的居庸关城楼,打开轮廓灯与照明灯,在夜色中绚烂光彩。
④以城楼为核心,灯光向两侧山脉迅速延伸,巍峨的长城如同一条彩色的巨龙,盘旋在天空与山脉之间,气势如虹....。
⑤未来我们将进一步传承发扬长城的历史文化价值,加强对居庸关长城的保护修缮和价值挖掘,让长城精神焕发出更加耀眼的时代光芒。
(1)下列说法不正确的一项是()A.①句中“呈现”可换为“展现”。
B.①句中的两处双引号用法相同。
C.①句中的成语“气势如虹”使用恰当。
D.①句中画波浪线的两处需要互换位置。
(2)文段中①句画横线的部分有语病,请将修改后的答案写在答题卡上。
机器人应用系统的再开发
1利用 机 器人作 业 程序 的可 操作性 , 以灵活 . 可 实现 产 品实现 的工 序策 划 , 以在 一个 完 整 的机器 可 人 工作 站 内实 现产 品 的全流 程 , 可 以 由多个 机器 也
人工作站联合完成产品实现的全流程 。通常 , 比较 复杂 的部件 ,如汽车的车桥和排气系统 的生产制 造, 都不是一个单一 的单作业用途的机器人工作站
所 能 胜 任 的 ,对 于 一 个全 新 的机 器人 策 划 方 案 而 言 , 器人 系统 制造 商 的设计 经 验 和机器 人 应用 功 机
制造质量的可靠性保障和高生产效率。 毫无疑问 , 质
量和效率 确实是 工业 机器人 得到广 泛应用 的优 势所
在。
能软件的支持直接决定着产品实现过程的合理性 、 实 效性 、 可操作性 。
技 术纵 横
4 5
新 设计 , 系统 布局 、 在 安装 形式 、 设备 组成 或 功 能方 面都有 不 同程度 的调 整 。
二、 机器人 系统改造 主要表现形 式
工业机器人系统的设计依据除了机器人本身所
具 备 的功能 及技 术参 数外 ,用 户 的需求 也是 至 关重 要 的 。 为机器 人 系统 的设计 者 , 作 我们 要做 的是 把用 户 对机 器人 系统 的功 能性 、 企业 标 准 、 产纲 领 或其 生
户 必须 考虑 的问题 。在 这个 环节 , 比较优 越 的设计 可 以为 以后 机 器人 的再 开发 利用 创造 有利 条 件 , 改 造 周期 也会 大 大缩 短 。近几 年 , 首钢 莫托 曼机 器人 有 限公 司 ( 下 简称 “ 钢 莫 托 曼 ”) 这 方 面做 以 首 在 了大 量 的标 准化 设 计 工作 ,已形 成 比较 成 熟 的 技 术, 让很 多客户 受益匪 浅 。 3 机 器 人 系 统 设 备 的配 备 上 也 要 突 出 “ . 柔 性 ”。 对于一 个机器 人 系统 而言 , 备 的增 加无疑会 设 造 成 投 资 者 的一 次 性 投 资成 本 增 加 ,具 体 配 备 什 么、 不配备 什 么 , 我觉得 可 以从 三方 面灵活取舍 : ( ) 品的特点 。产 品的更新 如果 不会带来 产 1产
建筑机器人技术应用及发展综述
建筑机器人技术应用及发展综述
詹达夫;郑智珂;施雨恬;曹新颖
【期刊名称】《建筑施工》
【年(卷),期】2022(44)10
【摘要】劳动力资源短缺、作业危险系数高等问题,严重影响着建筑业的发展。
建筑机器人等智慧建造技术的出现为建筑业转型升级带来了契机。
然而,建筑机器人作为多领域技术的交叉产物,其发展和应用受到各类因素的影响。
通过对近年来相关文献的检索、统计与分析,详述建筑机器人的起源、发展和技术应用现状,并从经济、技术、环境、行业等方面分析建筑机器人发展的影响因素。
同时,着眼于建筑业发展需求,对未来建筑机器人新形态及新工法的发展趋势进行预测,以期对建筑机器人及智慧建造后续发展提供理论参考。
【总页数】4页(P2474-2477)
【作者】詹达夫;郑智珂;施雨恬;曹新颖
【作者单位】海南大学土木建筑工程学院
【正文语种】中文
【中图分类】TU741
【相关文献】
1.焊接机器人应用技术在积淀中强大--首钢莫托曼机器人有限公司机器人弧焊技术开发应用综述
2.建筑机器人发展与关键技术综述
3.机器人智能化焊接技术发展综
述及其在运载火箭贮箱中的应用4.工业机器人技术的发展与应用综述5.计算机辅助骨科手术机器人技术发展及应用综述
因版权原因,仅展示原文概要,查看原文内容请购买。
钢铁行业智能制造中机器人的应用

钢铁行业智能制造中机器人的应用摘要:机器人作为智能制造的重要组成部分,具有重复精度好、稳定可靠、工作效率高等优势,同时还能胜任高危环境作业,在我国钢铁行业向“工业4.0”、“中国智能制造”转型升级过程中,发挥着非常重要的作用。
文章先简要概述了机器人在钢铁行业智能制造中应用的意义,然后分析了机器人的工作原理,最后详细介绍了机器人在钢铁行业智能制造中的应用,以供参考。
关键词:钢铁行业;智能制造;机器人;应用引言应用在钢铁行业智能制造中的机器人既可以按照预先编好的控制程序自动执行工作,也可以接受人类指挥,还可以根据人工智能技术制定的原则纲领行动。
应用在钢铁行业智能制造中的机器人集各种先进技术(传感技术、控制论、人工智能、仿生学等)于一身,具有高准确性、可靠性和一致性,能够在恶劣、危险、重复的工作环境下工作,对钢铁行业的可持续发展有重要影响。
1机器人在钢铁行业智能制造中的应用意义1.1提高冶炼效率改善冶炼效果在钢铁行业智能制造中应用机器人可以提高冶炼效率,在不停吹的情况下,机器人能够测量出钢水温度、碳含量,根据其测量结果,启动动态计算,计算出还需吹炼的氧量和冷却剂加入量,这不但提高了生产效率,更重要的是终点命中率不断提高。
1.2缩短冶炼周期提高生产效率机器人能够在转炉吹炼过程中不用停吹倒炉而进行自动取样测温,终点控制精度高,吹炼终点一次命中率高,后吹率低,大大缩短了冶炼周期。
直接出钢率情况如图1所示。
图11.3改善工作条件工人在冶炼过程中,需要进行人工测温取样,工人不仅要忍受高温,还要冒着被喷溅的危险去进行测温取样工作,这对工人身体健康及生命安全早晨很大威胁。
而在钢铁行业应用机器人进行炼钢,不仅能够将工人从危险的工作环境中解脱出来,还能提高工作效率,减少工作人员劳动强度。
实现机器人炼钢后,转炉附近的高温区域人的活动明显减少,地面上没有测温枪、样勺、铁锹等工具的堆放和残钢渣的痕迹,现场环境可以保持得很整洁。
焊接智能化促进高效焊接——访安川首钢机器人有限公司总工程师兼技术中心主任曾孔庚

焊接智能化促进高效焊接——访安川首钢机器人有限公司总工程师兼技术中心主任曾孔庚张维官【期刊名称】《金属加工:热加工》【年(卷),期】2015(000)012【总页数】2页(P20-21)【作者】张维官【作者单位】【正文语种】中文随着互联网技术的发展,制造技术正在发生革命性的变化,德国提出了“工业4.0”,将制造技术与互联网技术、信息技术深度融合。
2015年5月我国也正式发布“中国制造2025”,把机器人技术及其智能化作为优先发展的重点。
制造技术迅猛发展,以及制造业人口红利的消失,在各类制造行业内,用高速、高精度、高稳定性的机器人大量代替人工操作,实现产品制造的自动化、柔性化与智能化生产已经成为必然的趋势。
安川首钢机器人有限公司是由作为四大家族之一的日本安川机器人与中国首钢总公司共同投资,专业从事工业机器人机器自动化生产线设计、制造、安装、调试及销售的中日合资公司,在国内应用领域一直受到用户好评。
为此,本刊记者特约采访了机器人专家,安川首钢公司的总工程师兼技术中心主任曾孔庚先生,请他解读焊接智能化如何改善焊接质量和效率,提升企业的生产效率。
随着“中国制造”迈向“中国智造”,企业越来越重视生产质量和效率,提升市场竞争力,在国际市场竞争环境中占领战略高地。
因此促使越来越多的企业加快向智能化制造转变。
曾总告诉记者,机器人焊接最主要优势是品质稳定、效率高、降低劳动强度。
现代制造技术发展到今天,焊接是生产过程中一个非常重要的加工制造手段。
随着制造业产品品种不断多样化,产品性能质量更加追求完美,进而在制造过程中对焊接质量和效率也提出了更多的需求。
焊接量大、焊接品质要求高、焊接加工条件艰苦等,都造成了手工焊接无法满足现代制造业的需求。
此外,焊接技工的短缺,进一步凸显了这种需求的迫切性。
而机器人焊接不仅能够满足现代制造业对大量焊接需求,而且能够高品质的完成焊接工艺要求。
曾总进一步解释道,在焊接品质方面,机器人可以保证稳定的焊接动作,最佳的焊接参数。
国内外工业机器人的发展现状

5 l机械工程师 万方数据
2008年第7期
专题策t哆
日墨卫卫I匹墨富■皿匹墨口目豫点—■—■■●■■—■■—■■■■■—■■■—■■—■■■———■■■■—■—●■一
产品,很多智能型工业机器人已 综合了人和机器的特长.既具有 人对环境状态的快速反应和分析 判断力,又有可长时间持续工 作.高精高速.高可靠性.不惧 恶劣环境的能力。广泛采用工业 机器人.不仅可节约人力.降低 成本.提高企业竞争力,提高机 床利用率,提高产品的质量与产 量.更重要的是它可以保障工人 安全.改善工作条件,减轻劳动 强度.减少人员风险.提高工作 效率。因此.使用工业机器人早 已不是简单意义上用它来代替人 的劳动了。
f1)R-2000iA系列多功能智能 机器人。具有独特的视觉和压力传 感器功能.可以将随意堆放的工件 检起,并完成装配。
(2)Y44CCLDiA高功率LD YAG激光 机器人。拥有4.4千瓦LD YAG激光振 荡器.具有更高的效率和可靠性。
德国KUKA Roboter Gmbh公 司是世界几家顶级工业机器人制 造商之一.1 973年研制开发了 KUKA的第一台工业机器人。该 公司工业机器人年产量1万台左 右。所生产的机器人广泛应用在 仪器、汽车、航天、食品、制药、 医学、铸造、塑料等工业上。主 要用于材料处理.机床装料.装 配、包装,堆垛.焊接、r表面修 整等领域。
信凯机电
SO 9001质量体系认证企业 SO 14001环境体系认证企业
山西省平遥减速器厂
SHANXI PINGYAO REDUCER MACHINERY FACToRY 电话:0354—5651177 5651188 5651199 产品:各类齿轮减速器,电动滚筒.减速
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
触 摸屏 作为 系统 主操 作界 面 ,简单 直观 , 显示信息 内容广泛 洋细。通过触摸屏来完成设备 动作方式的设定并可以直接编辑夹具上各动作机
构 的动 作 顺 序 。
F ,又 签 订 了新 的 午桥焊 装项 目,继 后
问题 , 为生产 线的运行 安仝 , 品质 罩及 生产节拍 产
控 制提供 了可靠 的技术保 障 。 3 通过推 行标准 化机器 人焊 接 _ 作站 ,提 高 . T
器具 。在 f 同种 规格变 化 机和 控制系 统 的焊接 吧有 1 站 问 ,可 以实 现 T装 互 换 , 以满 足 某 种 产 作
了系统 的集成 化水平 ,缩短 了在用 户现 场 的安装
调 试周 期 ,为用户 的设 备使用 带来 方便 。 由于T
作站 的标准化 , 设备 置、 其 使用性 能及外观 效果
一
I d了然 , 而且具有 小 同的规 格 系列 , 这非 常便于
用 户 根据 需要 选 择产 品 。
4 通 过 推 行 焊接 卡具 的标 准 化 、模 块 化 设 . 汁,丌 发 出具有 自主 知 识产 权 的夹 紧装置 等关 键 技 术 ,提 高 了焊 接 卡 具 的设 汁效率 和 使用 性 能 。 山于标 准夹 紧装置 等通 用 零部件在 焊 接卡 具 中 占 有 很 大 比例 ,这 给用 户 的设备使 用及 维护 带来 极 大 的 方 便 ,也 降 低 了 设 备 的使 用 费 用 。
维普资讯
品 l嘲内 生 : 求。 配有同 格快 短+ 大昂 的要 在 , J - ‘ 专 种规
换T H 专用_装移动存放器具的焊接工作 』 :
矗
.
维修和服务 。 J 质且保证期外 , 首钢 荧托曼将捉供终身
维修和服务 , 的情收取服务 赞人_ 费和材料 费。 r 4 响应时 I :在 收 到 户要求 务 准确 信息 . . u J 后 的 2小 时 内做 出响应 。 对于普 通 故障 ,将 通过 电话 、传 真 等 指 导用 户 尽 快 恢 复 生 产 。埘 于 片 j
内, 零现整 张 套T装 快速更 换,日时改 ¨ 变生
人 弧 焊 领 域 的新 技 术 、 新 l ,提 升 了产 品 的 T艺
嗫 焊领 域又获得 了突破 性 的进 展 。 。
苷
场 份额进一步扩大。在车桥焊接等重点
『 . 突破 性 的进展 。先 厉 为国 内丰要汽 车
技 术性 能 ,为首钢 莫托 曼 的 K期稳 定发 展 打下 坚 实技术基 础 。
其酉 套 的快换 式焊 接 T装 、 专用 T装 移动和 存 放 己
2 采用先 进 的系 统 设 汁理 念 ,实现 了整个 T .
作系统 的柔 性控 制 ,方便 了操作 人 员对 整个 生产 过 程 的掌握 。 通过对每 套焊接夹 具 、 每个 夹紧 点和
定位点的控制, 严格保 证了各个点的工作顺序。 在 出现故障时,能很方便地杏出足 一个点出现 了
维普资讯
能为用户设训‘ 制造焊接系统 ,还能 为用户提供从焊
,
在国内机器人行业 占有重要地位的首 有限公司 ( 以下简称首钢莫托曼 )
g
接T艺编排到 T件交付——仝 化 的系统解 决方案。 3 丌 发 应 用 了机 器 人 T作 系统 柔 性 摔 制 技 . 术 、央 紧装 置专 利技 术 、 离线 编 程 等 一 批 机 器
域保 持 良好 的发 展 势 头 。 完 全统 计,
钢莫托曼实现机器人焊20 年 首 o 。 05 器人焊接系统 已占到 国内市场的5 %左 0 其实 的国内焊接机器人领域 的排头兵。 品技术 含量提 高 ,实现 由单个 T作站 向
解 决 方 案 向客 户 提 供 放 心 、满 意 的服 务 。
5 快 捷可 靠 的机 器人 柔性 焊接 生产应 用 。现 . 代化 的 生产 需求 已经 小仅仅 满足 于拥 有优 秀 的单 件批 _ 且生产 能力 , 随需应变 晌柔 性 化焊接 系统 能应 对 口益多样 复杂 的 『场 环境 。为 了使用户 的 } 『 投 资n 得到最 大 的使 _ 报 ,应埘 市场 需求 ,首 勺 晖 I 钢 莫托 曼 已经 在其 制造 的弧焊 系统 中普遍采 用 了 T装 快 换系统 。其 中包括标 准规 格 的变 位机 、与
使用 两 门子 公 司 T P系列 触摸 ,机 器人 控 制系 统使用 安川 电气 最新 的 N I0系 列控 制柜 。 系统 I XO 各设 备之 间改变 了以往直 接通 过物 理输 入输 出点 连 接 的方 式 ,采 用 P O I U R F B S和 A i ( S 执行 器 \ 传 感 器 )总 线 方 式 ,大 大 缩 短 了配 线 时 ,提 高 了系 统 可 靠 性 , 节 省 了 调 试 时 间 。
萄 设计制造 了4条午桥焊装生产线。进
二 、首钢复狂显机器 人弧焊系统的特点
首钢 莫托 曼机 器人焊 接控 制系 统主 要包括 以 下 几 个部 分 : P C控制 器 、 主操 作 疵 、机 器人 L 控 制 系 统 、夹 具 、 安 全 附 属 系统 。P【 c控 制器
采 用 德 国两 门子 公一 的 S 3 0系列 , 毛操 作麻 j 7 0
系统实现了详细的生产任务管 功能,包括
计数 统计 、班 次管理等 ,方便 客户进 行生产 管理
机器 用性
维普资讯
( 信 l 包 2箭 机 人 )
造 。专 业 的设 计和 生 产 试制 I伍 为客 户提 供 了极 - X  ̄ 大的方便 , 降低 了产 品试制成 本 , 以最优 化 的仝面