伺服机构的设计与实现(软件)论文
伺服控制系统(设计)

第一章伺服系统概述伺服系统是以机械参数为控制对象的自动控制系统。
在伺服系统中,输出量能够自动、快速、准确地尾随输入量的变化,因此又称之为随动系统或者自动跟踪系统。
机械参数主要包括位移、角度、力、转矩、速度和加速度。
近年来,随着微电子技术、电力电子技术、计算机技术、现代控制技术、材料技术的快速发展以及机电创造工艺水平的逐步提高,伺服技术已迎来了新的发展机遇,伺服系统由传统的步进伺服、直流伺服发展到以永磁同步机电、感应电机为伺服机电的新一代交流伺服系统。
目前,伺服控制系统不仅在工农业生产以及日常生活中得到了广泛的应用,而且在许多高科技领域,如激光加工、机器人、数控机床、大规模集成电路创造、办公自动化设备、卫星姿态控制、雷达和各种军用武器随动系统、柔性创造系统以及自动化生产线等领域中的应用也迅速发展。
1.1 伺服系统的基本概念1.1.1 伺服系统的定义“伺服系统”是指执行机构按照控制信号的要求而动作,即控制信号到来之前,被控对象时静止不动的;接收到控制信号后,被控对象则按要求动作;控制信号消失之后,被控对象应自行住手。
伺服系统的主要任务是按照控制命令要求,对信号进行变换、调控和功率放大等处理,使驱动装置输出的转矩、速度及位置都能灵便方便的控制。
1.1.2 伺服系统的组成伺服系统是具有反馈的闭环自动控制系统。
它由检测部份、误差放大部份、部份及被控对象组成。
1.1.3 伺服系统性能的基本要求1 )精度高。
伺服系统的精度是指输出量能复现出输入量的精确程度。
2 )稳定性好。
稳定是指系统在给定输入或者外界干扰的作用下,能在短暂的调节过程后,达到新的或者恢复到原来的平衡状态。
3 )快速响应。
响应速度是伺服系统动态品质的重要指标,它反映了系统的跟踪精度。
4)调速范围宽。
调速范围是指生产机械要求机电能提供的最高转速和最低转速之比。
5 )低速大转矩。
在伺服控制系统中,通常要求在低速时为恒转矩控制,电机能够提供较大的输出转矩;在高速时为恒功率控制,具有足够大的输出功率。
伺服控制系统课程论文
伺服控制系统课程作业现代伺服系统综述指导教师:学生:学号:专业:班级:完成日期:摘要在自动控制系统中,把输出量能够以一定准确度跟随输入量的变化而变化的系统称为伺服系统。
伺服系统也叫位置随动系统,以精确运动控制和力能输出为目的,综合运用机电能量变换与驱动控制技术、检测技术、自动控制技术、计算机控制技术等,实现精确驱动与系统控制。
伺服系统主要包括电机和驱动器两部分,广泛用于航空、航天、国防及工业自动化等自动控制领域。
伺服系统按其驱动元件划分有步进式伺服系统、直流电动机伺服系统和交流电动机伺服系统。
随着微处理器技术、大功率高性能半导体功率器件技术、电机永磁材料制造工艺的发展及电力电子、控制理论的应用,交流电动机伺服系统近年来获得了迅速发展,广泛用于工业生产的各个领域,如数控机床的进给驱动和工业机器人的伺服驱动等。
因此,在相当大的范围内,交流电动机伺服系统取代了步进电动机与直流电动机伺服系统,时至目前,具备了宽调速范围、高稳速精度、快速动态响应及四象限运行等良好的技术性能,其动、静态特性已完全可与直流伺服系统相媲美,已成为伺服系统的主流。
关键词:伺服系统自动控制驱动元件1 伺服系统的发展阶段伺服系统的发展与它的驱动元件——伺服电动机的不同发展阶段相联系,并结合老师在第一章所讲的伺服系统分类的知识,伺服电动机至今经历了三个主要的发展阶段。
(1)第一个发展阶段(20世纪60年代以前):步进电动机开环伺服系统;伺服系统的驱动电机为步进电动机或功率步进电动机,位置控制为开环系统。
步进电机是一种将电脉冲转化为角位移的执行机构,两相混合式步进电机步距角一般为3.6°、1.8°,五相混合式步进电机步距角一般为0.72°、0.36°;步进电机存在一些缺点:在低速时易出现低频振动现象;一般不具有过载能力;步进电机的控制为开环控制,启动频率过高或负载过大易出现丢步或堵转现象,停止时转速过高易出现过冲现象。
伺服电机控制实验装置设计——程序设计毕业论文

南阳理工学院本科生毕业设计(论文)学院(系):电子与电气工程系专业:自动化学生:指导老师:完成日期2011 年 5 月南阳理工学院本科生毕业设计(论文)伺服电机控制实验装置设计——程序设计Servo motor control experiment device design——programming总计:毕业设计(论文)页表格:9 个插图:12 幅南阳理工学院本科毕业设计(论文)伺服电机控制实验装置设计——程序设计Servo motor control experiment device design——programming学院(系):电子系专业:自动化学生姓名:学号:079611指导教师(职称):评阅教师:完成日期:南阳理工学院Nanyang Institute of Technology伺服电机控制实验装置设计——程序设计自动化[摘要]该系统是基于台达PLC和台达变频器的伺服电机控制系统设计,利用变频器控制异步电机,通过旋转编码器来间接的测出异步电机的速度,把速度转化为脉冲的形式送给PLC来控制伺服电机,实现伺服电机与异步电机的跟随功能,并通过人机界面的程序来控制伺服电机的转动形式与修改PLC的内部寄存器来改变伺服电机的速度,同时也要设定好伺服驱动器的内部参数以达到良好的控制效果。
[关键词]变频器;PLC;异步电机;伺服电机;控制精度Design of Servo motor control experiment device——programmingAutomation Specialty NIE Yao-huaAbstract: This system is a servo control system which designed based on Delta PLC , Delta Variable-frequency and servo motor, using Delta Variable-frequency to control asynchronous motor. Through the revolving encoder to measure the asynchro nous motor’s speed. Then translate the speed into pulse form to PLC to control servo motor, to realize the function of the servo motor tracking the asynchronous motor absolutely, and through the program of the Human Machine Interface tocontrol the servo motor’s rotating form and change the parameters of Human Machine Interface and Delta Variable-frequency Drive to change the motor speed, also need setting the servo drive internal parameters to achieve good control effect.Key words: Variable-frequency drive; Programmable logic controller; Asynchronous motor;Servo motor;Control precision;目录1 引言 (1)1.1 伺服控制技术的国内外研究现状 (1)1.2 设计内容和任务要求 (1)1.2.1设计内容 (1)1.2.2任务要求 (1)1.3 系统设计可行性分析 (2)2 系统的控制硬件原理 (3)2.1台达PLC与其工作原理 (3)2.2 台达变频器的介绍 (4)2.3 伺服驱动器的功能介绍 (5)2.4 伺服电机的工作原理 (7)2.5 人机界面的功能介绍 (8)3 台达PLC控制系统的程序设计 (10)3.1基本指令功能介绍 (10)3.2 应用指令功能介绍 (13)3.3 程序的设计思路 (16)3.4 程序的各个模块功能介绍 (17)3.4.1 程序流程图 (18)3.4.2 伺服电机正反转与加减速程序设计 (19)3.4.3 伺服电机跟随功能的程序设计 (19)4 人机界面程序介绍 (22)4.1 人机界面的设计制作 (22)4.2人机界面的程序介绍 (25)结束语: (28)参考文献 (28)附录一:控制设备硬件图 (29)附录二:控制程序梯形图 (30)致谢 (32)1 引言1.1 伺服控制技术的国内外研究现状在国外,伺服控制不仅应用于普通的工业和农业医疗等,在卫星和导弹的准确定位方面也起着越来越重要的作用,这种新型的控制系统已悄然改变着国外的生产模式。
伺服电机控制系统毕业论文设计
调速应用领域最初用得最多的是直流电机,随着交流调速技术特别是电力电子技术和控制技术的发展,交流变频技术获得了广泛应用,变频器和交流电动机迅速渗透到原来直流调速系统的绝大多数应用领域。近几年来,由于直流伺服电动机体积小、重量小和高效节能等一系列优点,中小功率的交流变频系统正逐步被直流伺服电动机系统所取代,特别是在纺织机械、印刷机械等原来应用变频系统较多的领域,而在一些直接由电池供电的直流电机应用领域,则更多的由直流伺服电动机所取代。
This article mainly discusses the designations of three-phase BLDCM velocity modulation system. The master controlled unit is BLDCM special-purpose control chip 80C196MC, assistanceswith the keyboard, the monitor, examines the electric circuit, the power electric circuit, actuates the electric circuit, the protection circuit and so on. The BLDCM with 3 Hall sensors establishing inside, to exam the position of the rotor and decide the phase change of electricalmachinery, the system calculates the rotational speed of the electrical machinery to realize the velocity-feedback control according to the Hall signal.
平面XY伺服控制系统的设计结题论文
机电系统综合设计报告平面XY——伺服数字控制的设计院系名称:机械与储运工程学院专业班级:机械设计制造及其自动化班学生姓名:学号:同组学生姓名:学号:指导教师:完成日期年月日摘要本课程设计要求通过计算机编程语言实现对伺服电机的控制,以此巩固和加强有关机电一体化知识的理解。
报告详细阐述了GT运动控制器的硬件,软件环境。
GT运动控制器的控制原理,运用VB 6.0实现数控技术中逐点比较法的插补原理,图像的二值化原理,图像轮廓提取的四邻域法原理,以及这些原理在本课程设计中的具体应用和实现方法。
介绍本小组制作的伺服电机控制系统的界面及原理,让读者在一定程度上了解数控技术,图像处理技术以及其他一些相关的知识内容。
关键词:GT运动控制器;VB 6.0;插补原理;二值化;四邻域法目录摘要 (I)第1章设计目的及要求 (1)1.1 设计目的 (1)1.2 设计要求 (1)第2章设计的软硬件环境 (2)2.1 设计系统的硬件环境 (2)2.2 设计系统的软件环境 (2)第3章设计原理 (3)3.1 电机驱动使能及驱动 (3)3.1.1 运动控制卡的初始化 (3)3.1.2 专用输入信号参数的设置 (3)3.1.3 运动控制轴的初始化 (3)3.2 单轴运动 (4)3.3 多轴运动 (5)3.4 插补算法 (6)3.4.1 直线插补算法 (6)3.4.2 圆弧插补算法 (7)3.4.3 椭圆插补算法 (9)3.5 图形轮廓提取 (10)3.6 图像数据处理 (11)第4章设计方案及具体实施 (12)4.1 总体设计方案 (12)4.2 控制轴的复位及限位判断 (13)4.3 几何图形加工的程序实现 (14)4.3.1 直线加工的程序实现 (14)4.3.2 圆弧加工的程序实现 (15)4.3.3 椭圆加工的程序实现 (15)4.4 图形轮廓加工的程序实现 (16)4.4.1 电机位置的调整 (17)4.4.2 图像的二值化处理 (17)4.4.3 图像的轮廓提取 (17)4.4.4 图像数据处理及轮廓加工 (18)第5章设计结果与不足 (19)第6章设计总结 (20)附录A 课程设计日志 (21)附录B 设计成果(加工出的插补曲线图,图像轮廓图) (22)第1章设计目的及要求1.1 设计目的本课程设计要求以GT系列运动控制器为核心,以计算机高级语言为控制手段,通过计算机与运动控制器相互通信,对其进行初始化,运动过程的控制来实现运动控制器两轴和笔架的运动,并绘制简单的几何图形如:直线,圆,椭圆等,绘制计算机处理后的图形。
伺服系统的软件设计与开发
伺服系统的软件设计与开发伺服系统是一种具有反馈控制的电机控制系统,其主要功能是精确控制伺服电机的运动,使其在给定的时间内到达目标位置或达到目标速度。
在伺服系统中,软件系统起着至关重要的作用,它负责将高层控制指令转化为电机控制信号,并运行在嵌入式系统上,实时控制运动状态和运动精度。
1.伺服系统软件设计的基本要求伺服系统软件设计的基本要求是实时性、可靠性和稳定性。
实时性是指系统必须以确定的时间响应用户的指令,保证在规定的时间内完成控制任务。
可靠性是指系统必须在长时间的运行中保持稳定,不出现死机、控制失效等故障。
稳定性是指系统必须能够在不同环境下保持稳定的控制精度和运动精度。
2.伺服系统软件设计的框架和工具伺服系统的软件设计应该遵循模块化、可复用、可维护和可移植的原则。
常见的设计框架包括MVC模式、MVVM模式和其他基于组件化的设计模式。
软件的编写语言可以选择C、C++、Python等,开发环境可以使用Visual Studio、Eclipse等IDE软件。
同时要注意选择合适的编译器、调试器和代码版本管理工具。
3.伺服系统软件设计的关键技术(1)运动控制算法伺服系统的核心技术是运动控制算法,实现良好的运动控制算法是保证伺服系统运行稳定的关键。
运动控制算法主要包括位置控制、速度控制和力控制等方法,可以应用PID、自适应控制、模糊控制、神经网络控制等算法实现。
(2)位置检测与反馈控制伺服系统需要有高精度的位置检测系统和反馈控制系统,以实现对电机位置的精确控制。
通常采用编码器、激光干涉仪、光电开关等位置传感器进行位置检测,通过高精度的反馈进行闭环控制。
(3)通信协议伺服系统需要与上位机、其他设备进行通信,因此需要制定或选择合适的通信协议。
常用的协议包括CAN总线、RS485总线、以太网通信等,应根据实际的控制应用场景选择。
4.伺服系统软件开发流程伺服系统软件开发需要遵循软件工程的基本原则和开发流程,包括需求分析、设计、编码、测试和维护等阶段。
伺服电机调速系统的控制设计与仿真
武汉理工大学硕士学位论文基于DSP的直流伺服电机调速系统的控制设计与仿真姓名:于龙飞申请学位级别:硕士专业:轮机工程指导教师:鲁凯生20070501先来看一下一个编码器的结构图,如图2.1图2.1编码器实物图光电编码器的指示光栅上有A组与B组两组狭缝,彼此错开1,4节距,两组狭缝相对应的光敏元件所产生的信号A、B彼此相差90。
相位,用于辫向,如图2-1中的A、B两组。
工作原理如图2.2所示。
第4章系统的控制设计本章直流伺服电动机调速系统的设计分两部分:软件设计和硬件设计。
在软件设计中,介绍了DSP控制软件CCS及程序结构;在硬件设计中,在PWM对电机调速的原理上,设计了TMS320LF2407DSP芯片对直流伺服电机调速系统的实验电路。
最后,进行了对直流伺服电机的实际控制实验,达到了预期的目的。
4.1DSP控制软件CCS(CodeComposerStudio)软件是TMS320LF2407DSP芯片自带的编程软件,是目前DSP变成软件中最优秀的软件。
利用这个软件,可以直接使上位机图4_1CCS启动界面和DSP通讯,在上位机中编程控制DSP的输出波形,达到控制直流伺服电机的速度的且的。
CCS启动界面见图4.1中所示。
图4.3软件开发流程图◆C编译器(ceompiler):产生汇编语言源代码。
◆汇编器(assembler):把汇编语言源文件翻译成机器语言目标文件,机器语言格式为公用目标格式(CoFF)。
令连接器(Iink神:把多个目标文件组合成单个可执行目标模块。
它一边创建可执行模块,一边完成重定位以及决定外部参考。
连接器的输入是可重定位的目标文件和目标库文件。
◆归档器(arehiver):允许你把一组文件收集到一个归档文件中。
归档器也允许你通过删除、替换、提取或添加文件来调整库。
夺助记符至Ⅱ代数汇编语言转换公用程序(mnimorticto_algebricassemblytranslatorutility):把含有助记符指令的汇编语言源文件转换成含有代数指令的汇编语言源文件。
伺服驱动系统设计方案及对策

伺服驱动系统设计方案及对策一、硬件设计方案及对策:1.选用高性能的伺服电机和驱动器:根据具体需要选择适合的伺服电机和驱动器,确保其具备足够的功率和控制精度。
在选择过程中,需要对驱动器的技术参数进行充分了解,并评估其适用性和可靠性。
2.采用合适的编码器:编码器用于测量电机的位置和速度,对伺服驱动系统的控制精度至关重要。
选择合适的编码器,能够提供高分辨率和高精度的反馈数据,并且具备良好的抗干扰性能。
3.电源设计:伺服驱动系统对电源质量和稳定性要求较高,需要提供稳定的电源供应和电磁兼容性设计,避免电源波动对系统性能的影响。
4.散热设计:伺服电机和驱动器在运行时会产生较大的热量,必须进行有效的散热设计,以确保系统的稳定性和可靠性。
可采用风扇散热、散热片等方式来降低温度。
5.机械设计:在伺服驱动系统中,机械结构的设计对系统性能有很大影响。
需要针对具体应用场景选择合适的传动方式和结构设计,考虑到负载、速度、精度等因素。
6.停电保护设计:为了避免突发停电导致系统损坏,可以设计备用电池或超级电容器等储能装置,以保证在停电短时间内继续工作并正常停机。
二、软件设计方案及对策:1.控制算法设计:通过对伺服电机的位置、速度和加速度等参数进行精细控制,实现对运动轨迹的准确控制。
设计合理的控制算法,能够提高系统的控制精度和稳定性。
2.运动控制软件设计:根据伺服驱动系统的应用需求,设计合理的运动控制软件,包括运动插补算法、软件调速、位置校正等功能。
3.通信接口设计:伺服驱动系统通常需要与上位机或其他设备进行通信,需要设计合适的通信接口,以实现数据传输和控制。
4.用户界面设计:为了方便用户操作和监测系统运行状态,可以设计友好的用户界面,包括参数设置、故障诊断、实时监控等功能。
5.系统诊断与故障检测设计:通过设计合理的系统诊断和故障检测功能,可以检测和排除系统故障,提高系统的可靠性和稳定性。
三、通信网络设计方案及对策:1.选择适当的通信协议:根据伺服驱动系统所处的应用环境和通信要求,选择适当的通信协议,如CAN总线、以太网等。
基于PXI的电液伺服作动器控制系统的设计与实现
基于PXI的电液伺服作动器控制系统的设计与实现作者:胡志新等来源:《现代电子技术》2012年第01期摘要:针对某工程机械中的作动器装置,利用其液压系统的工作原理,设计了一种基于PXI的电液伺服作动器控制系统。
在介绍作动器液压回路工作原理的基础上,简述了控制系统的设计方案及其组成。
该设计解决了该作动器开环控制误差大的问题,具有控制精度高,灵敏度高,结构紧凑,可复用性高等优点。
关键词:电液伺服阀;伺服系统;作动器; PXI;中图分类号:TN911.7-34文献标识码:A文章编号:1004-373X(2012)01-0205-03Design and implementation of EHSV actuator control system based on PXIHU Zhi-xin1, NIU Xiao-bo1, ZHAO Jian-(1.Chang’an University, Xi’an 710064, China; 2.Equipment Management Department, Qinghai Oil Field Company, Dunhuang 736202, China)Abstract:An electro-hydraulic servo actuator control system based on PXI was designed for the actuator device of one construction machinery by using hydraulic system working principle. On the basis of introducing the principle of the actuator hydraulic circuit, the design of the control system and its component are outlined. This design has solved the problem of large errors in the actuator open-loop control, and has advantages of high control accuracy, high sensitivity, compact structure and reusability.Keywords: EHSV; servo system; actuator; PXI; LabVIEW收稿日期:2011-09-290 引言作动器是一种以液压油为动力源的摆动机构,在飞行器的升降翼、方向舵、水平襟翼以及坦克、船舶、火车等多种需要摆动机构的场合得到了广泛的应用。
伺服驱动器及伺服控制的技术文献及设计方案汇总
伺服驱动器及伺服控制的技术文献及设计方案汇总
伺服词源于希腊语奴隶的意思。
人们想把伺服机构当个得心应手的驯
服工具,服从控制信号的要求而动作。
在讯号来到之前,转子静止不动;讯号来
到之后,转子立即转动;当讯号消失,转子能即时自行停转。
由于它的伺服性能,因此而得名伺服系统。
基于VB的伺服驱动器串口通信的实现
本文即针对德国博世力士乐的伺服驱动器indradrive,采用灵活易用的
VB6.0编程语言,通过indradrive本身所带的rs232串行通信接口,实现了上位pc机与伺服驱动器的串行通信,完成了对伺服驱动器内部各控制参数的实时控制。
基于FPGA的伺服驱动器分周比设计与实现
分频的难点是,无论设定分周比是整数还是分数,分频后输出的A’相,B’相脉冲仍然要保持正交或近似正交。
为此提出一种基于FPGA的整数分周比
实现方法。
该方法逻辑结构简单,配置灵活,易于扩展,具有很高的实用价值。
基于CPLD的编码器解码接口、PWM输出方案及其在运动控制卡和伺
服驱动器中的应用
通过一套完整的算法来把位置、速度、力矩等信息纳入体系中来,做实
时反馈处理,这也就是我们所说的闭环(半闭环)处理,我们常见的算法就是
PID(或PI)算法。
这样以来,就比较方便于让机械设备在全自动的运行下达到快、准、柔的特性。
时光伺服控制器在定长剪切系统的应用
定长剪切是一个涵盖行业非常广泛的应用领域,在冶金、造纸、包装、。
伺服控制系统的设计与应用
伺服控制系统的设计与应用伺服控制系统是一种能够对物理系统进行精确控制的系统,其应用范围非常广泛,从机械制造到航空航天,再到医疗设备等领域都有其身影。
本文将探讨伺服控制系统的设计与应用。
一、伺服控制系统的组成与原理伺服控制系统由三部分组成:传感器、控制器和执行机构。
其基本原理是反馈控制,即根据传感器测得的系统输出量与期望输出量之间的误差来实现对执行机构的控制。
控制器会通过对误差进行处理,输出适当的控制信号,控制执行机构的工作状态,使其不断逼近期望输出量。
因此,伺服控制系统能够对系统运动进行精确的控制。
二、伺服控制系统在机械制造中的应用在机械制造中,伺服控制系统的应用非常广泛。
比如在机床加工中,伺服控制系统可用于对工件进行精确定位和加工;在液压系统中,伺服控制系统可用于精确控制压力和流量;在自动化装配线中,伺服控制系统可用于实现精确的零件定位和装配。
三、伺服控制系统在机器人中的应用在机器人领域,伺服控制系统也是必不可少的一部分。
机器人需要通过伺服控制实现精确定位和动作的执行,从而完成各种各样的任务。
在机器人的关节处安装伺服电机,利用其精确的位置反馈信号,轻松实现机器人的各种动作。
四、伺服控制系统在医疗设备中的应用伺服控制系统还被广泛应用于医疗设备中,比如手术机器人等。
手术机器人需要操作极为精确,但医生手部的细微变化可能影响手术结果。
因此,伺服控制系统可以帮助手术机器人实现精确的移动和定位,从而减小手术操作的风险。
五、伺服控制系统的设计与优化伺服控制系统的设计需要考虑很多因素,如控制器的选型、传感器的选择和执行机构的设计等。
此外,要注意传感器信号的采集和处理,以及控制信号的输出类型和稳定性等问题。
同时,还需要针对具体的应用场景进行优化和调整,以达到最佳的控制效果。
总之,伺服控制系统是现代工业制造和科技发展的重要一环,其应用广泛,涉及面非常广,而其设计与优化也是非常重要的一环,必须充分考虑各种因素和应用场景,才能发挥出其最大的效益。
伺服电机毕业设计论文
南京工程学院自动化学院本科毕业设计(论文)题目:SVPWM 在BLDC电机中的应用Graduation Design (Thesis) SVPWM in The Application of BLDC MotorByZHU XiangSupervised byTENG Fu LinSchool of AutomationNanjing Institute of TechnologyJune, 2012毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
伺服运动控制器的研制毕业设计

摘要随着科学技术的进步,传统的运动控制系统由于本身的特性限制难以满足现代工业的要求,研究和开发具有开放式结构的高性能运动控制器已成为当前运动控制领域的重要发展方向。
本论文以永磁交流同步伺服电动机为核心,对运动控制器的硬件结构进行了全面的改进,实现了运动控制单元和外围处理单元,研制了一种用常规芯片系列组成的运动控制器,提出了采用单稳态多谐振荡器和数据选择器的四倍频辨向电路。
该系统硬件结构是基于普通PC机或工控机的ISA总线而开发,其功能集12位DAC转换、定时中断、脉冲接收、倍频辨向计数、零点检测与使能报警等于一体。
该系统的软件结构通过对系统CMOS/实时时钟(RTC)编程实现高精度定时硬件中断,对系统CMOS/实时时钟(RTC)编程实现高精度定时,在中断程序中加入PID控制算法,可以满足高精度的伺服电机位置控制的要求。
关键字:伺服系统实时钟 PID控制ABSTRACTWith the progress of the technology, it is diffcult for the traditional Motion ControlSystem to satisfy the demands of the modern industry. Currently, it has been an important trendin the motion control field to develop the high-capability Motion Controller with the openstructure.Motion controller composed of general chip series is developed and Quadruple differential Circuit utilizing dual monostable multivibra-tors with Sehmitt trigger inputs and dual 4_line to 1_line data selectors or multiplexers is put forward.Hardware framework of the system is basedon ISA buses of general PC or IPC,including 12_bit multiplying D/A conversion,time interruptpulse receiving,zero check and on-off and warning circuit.Software framework is put forward based on the technical programming the CMOS/Real Timer Clock,adopting VtoolsD to programme VxD and real-time position control of servo electromotor is realized.So the key problem of developing NC in the Windows is solved.And,PID controller is designed,PID control arithmetic is programmed,parameters of control system are adjusted online,experiment is researched and the result is analyzed.Experimental result showed that programming CMOS/RTC,realizing high precision time through program VxD along with PID arithmetic in the interrupt can meet the requjre of high preci sion position control of servo electromotor.The paper firstly introduces the origin, research significance, related technical status and main contents of the task, and describes the system as a whole in detail, then discusses the hardware design, software design, and the algorithms design respectively. Finally, The paper brings forward the main contents of advanced research.Keyword:毕业设计(论文)原创性声明和使用授权说明原创性声明本人重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作与取得的成果。
伺服驱动系统设计方案及对策
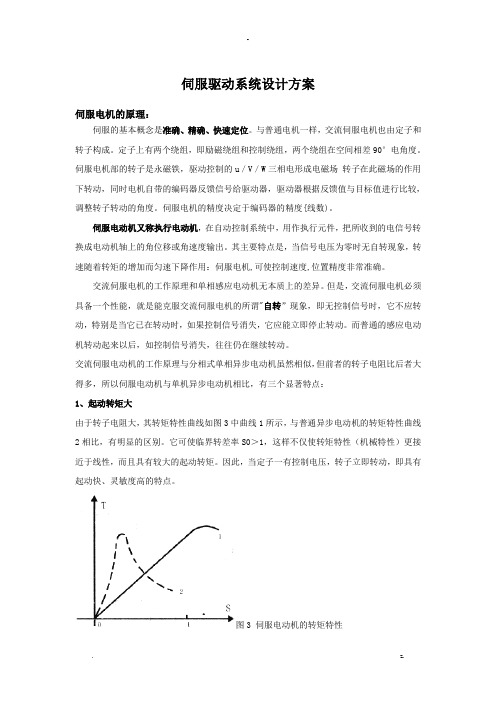
伺服驱动系统设计方案伺服电机的原理:伺服的基本概念是准确、精确、快速定位。
与普通电机一样,交流伺服电机也由定子和转子构成。
定子上有两个绕组,即励磁绕组和控制绕组,两个绕组在空间相差90°电角度。
伺服电机部的转子是永磁铁,驱动控制的u/V/W三相电形成电磁场转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。
伺服电机的精度决定于编码器的精度{线数)。
伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。
其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降作用:伺服电机,可使控制速度,位置精度非常准确。
交流伺服电机的工作原理和单相感应电动机无本质上的差异。
但是,交流伺服电机必须具备一个性能,就是能克服交流伺服电机的所谓"自转”现象,即无控制信号时,它不应转动,特别是当它已在转动时,如果控制信号消失,它应能立即停止转动。
而普通的感应电动机转动起来以后,如控制信号消失,往往仍在继续转动。
交流伺服电动机的工作原理与分相式单相异步电动机虽然相似,但前者的转子电阻比后者大得多,所以伺服电动机与单机异步电动机相比,有三个显著特点:1、起动转矩大由于转子电阻大,其转矩特性曲线如图3中曲线1所示,与普通异步电动机的转矩特性曲线2相比,有明显的区别。
它可使临界转差率S0>1,这样不仅使转矩特性(机械特性)更接近于线性,而且具有较大的起动转矩。
因此,当定子一有控制电压,转子立即转动,即具有起动快、灵敏度高的特点。
图3 伺服电动机的转矩特性2、运行围较宽如图3所示,较差率S在0到1的围伺服电动机都能稳定运转。
3、无自转现象正常运转的伺服电动机,只要失去控制电压,电机立即停止运转。
当伺服电动机失去控制电压后,它处于单相运行状态,由于转子电阻大,定子中两个相反方向旋转的旋转磁场与转子作用所产生的两个转矩特性(T1-S1、T2-S2曲线)以及合成转矩特性(T-S曲线)如图4所示,与普通的单相异步电动机的转矩特性(图中T′-S曲线)不同。
伺服控制系统的设计与应用研究

伺服控制系统的设计与应用研究伺服控制是一种基于反馈原理的控制方法,它可以将电机等电力器件置入一个闭环控制系统中,使其具有较高的精度和稳定性。
近年来,伺服控制系统在机器人、自动化生产线、数控机床等领域得到了广泛应用,为工业自动化的发展做出了重要贡献。
一、伺服控制系统的基本原理伺服控制系统的核心是一个反馈环路,其基本构成包括:执行器、传感器、控制器和负载。
执行器指的是电机等能够执行工作的器件,传感器则负责检测执行器在工作过程中的状态变化(如角度、速度信息),控制器则根据传感器采集到的状态信息进行控制,调节执行器的工作状态,最终实现对负载的控制。
伺服控制系统的运作原理可简单归纳为:传感器检测执行器输出的状态信息,将其反馈给控制器;控制器依据设定的控制算法处理反馈信息,并输出控制信号给执行器;执行器接收控制信号后,安装控制信号调整电机输出的状态,从而控制负载的状态。
二、伺服控制系统的研究内容1. 伺服控制系统的控制算法伺服控制系统的控制算法直接影响其控制精度和稳定性,目前常用的控制算法包括PID算法、模糊控制算法、神经网络控制算法等。
针对不同的应用场景,需要研究选择适合的控制算法,并对其进行优化与改进,提高系统的控制精度和稳定性。
2. 伺服控制系统的匹配优化伺服控制系统的匹配性能指的是在不同应用场景下,伺服控制系统的输出负载能力是否与其输入负载相匹配。
为了提高伺服控制系统的匹配性能,需要进行匹配优化,优化控制算法、电机性能、传感器性能等各个方面的参数,降低系统的匹配误差,提高其匹配精度和稳定性。
3. 伺服控制系统的自适应控制自适应控制指的是控制系统自动调整其算法参数,使其适应不同的工作环境、任务需求等多种条件。
伺服控制系统的自适应控制可以根据执行器的工作状态,自动调整PID参数、功率调节等相关参数,提高系统的自适应性能。
同时,自适应控制还能够有效的降低系统的干扰和噪声等外界因素的影响,增加了伺服控制系统的适用范围和性能。
伺服控制系统中软件控制设计方法研究
伺服控制系统中软件控制设计方法研究伺服控制系统是一种基于闭环控制原理的控制系统,主要应用于各种工业自动化领域。
在伺服控制系统中,软件控制是一个十分关键的环节,其设计合理与否直接影响到系统的控制性能及稳定性。
本文旨在探讨伺服控制系统中软件控制的设计方法,并提供一些实用的参考意见。
一、伺服控制系统的基本结构伺服控制系统通常由执行机构、控制器和传感器三部分组成。
执行机构是控制系统的被控对象,包括各种驱动器、电机等;控制器则负责计算控制量与实际量之间的差值,生成控制信号,向执行机构输出控制指令;传感器则用来检测执行机构的状态,将反馈信号传递回控制器,从而实现闭环控制。
二、软件控制设计方法的研究在伺服控制系统中,软件控制是控制器中非常重要的环节。
传统的伺服控制器通常采用模拟控制或数字控制的方式,但由于现代计算机技术与数字信号处理技术的日益成熟,越来越多的控制器开始采用基于软件的控制方法。
(一)控制算法的选择在伺服控制系统中,控制算法是决定软件控制效果的关键。
根据系统的需求和具体应用情况选择合适的控制算法是软件控制设计的首要任务。
目前主要的控制算法包括PID控制算法、模糊控制算法、神经网络控制算法等。
在控制算法的选择上,必须根据系统需求以及控制对象的特点合理选择,同时还需要考虑算法的鲁棒性、控制效果及算法的复杂度等因素。
(二)控制参数的调节在软件控制设计中,控制参数调节是一个十分关键的环节。
合理的控制参数的设置可以使系统获得较好的稳态和动态性能,而不合理的参数设置则会导致系统出现震荡、超调等问题。
控制参数的设置需要根据具体系统进行调节,根据调试经验或者现代方法进行参数优化。
目前主要的参数优化方法包括模型优化法、遗传算法、粒子群算法等。
(三)实时性保证伺服控制系统的实时性要求十分高,软件控制的实时性是保证系统控制性能和稳定性的关键。
为了保证软件控制的实时性,需要通常使用实时操作系统(RTOS)来实现。
RTOS可以保证实时性的同时,还具有较高的可靠性、可用性和可维护性等特点,能够在保证实时性的同时提高系统的稳定性。
伺服控制设计总结范文

随着现代工业自动化技术的飞速发展,伺服控制系统在各个领域的应用越来越广泛。
伺服控制系统作为一种高性能、高精度的自动化控制系统,其设计的好坏直接影响到系统的性能和可靠性。
以下是对伺服控制设计的一次总结。
一、设计原则1. 系统稳定性:在设计伺服控制系统时,首先要保证系统的稳定性,避免系统出现自激振荡、超调等现象。
2. 系统响应速度:响应速度是伺服控制系统的重要性能指标之一,提高响应速度可以缩短系统动态过程,提高生产效率。
3. 系统精度:伺服控制系统的主要作用是实现高精度控制,因此在设计过程中要充分考虑系统精度。
4. 系统抗干扰能力:在工业现场,伺服控制系统会面临各种干扰,如电磁干扰、温度干扰等,设计时要提高系统的抗干扰能力。
5. 系统可靠性:提高系统的可靠性,降低故障率,确保系统长期稳定运行。
二、设计方法1. 硬件设计:根据系统需求,选择合适的伺服驱动器、伺服电机、传感器等硬件设备,并合理布局,确保系统性能。
2. 控制算法设计:根据系统特点,选择合适的控制算法,如PID控制、模糊控制、神经网络控制等,并对其进行优化。
3. 软件设计:编写控制程序,实现控制算法,并进行调试和优化,确保系统稳定运行。
4. 系统仿真:利用仿真软件对系统进行仿真,验证系统性能,发现问题并及时解决。
5. 系统测试:在实际运行环境下对系统进行测试,验证系统性能,确保系统满足设计要求。
三、设计要点1. 选择合适的伺服驱动器和伺服电机:根据系统负载、精度等要求,选择合适的伺服驱动器和伺服电机,确保系统性能。
2. 设计合理的控制算法:根据系统特点,选择合适的控制算法,并对其进行优化,提高系统性能。
3. 优化硬件布局:合理布局硬件设备,减少电磁干扰,提高系统稳定性。
4. 软件优化:优化控制程序,提高系统响应速度和精度。
5. 抗干扰设计:在设计过程中,充分考虑抗干扰措施,提高系统抗干扰能力。
四、总结伺服控制系统设计是一项复杂而重要的工作,需要综合考虑系统稳定性、响应速度、精度、抗干扰能力等因素。
《面向数控的伺服控制器的设计与实现》

《面向数控的伺服控制器的设计与实现》面向数控的伺服控制器设计与实现一、引言随着制造业的快速发展,数控技术已经成为现代制造业不可或缺的一部分。
伺服控制器作为数控系统的核心组成部分,其性能直接影响到数控设备的加工精度和效率。
因此,设计并实现一款高性能的面向数控的伺服控制器显得尤为重要。
本文将详细介绍伺服控制器的设计思路、实现方法及实验结果。
二、设计思路1. 总体设计伺服控制器的设计需考虑到实时性、稳定性和精度等多方面因素。
总体设计采用模块化思想,将伺服控制器分为控制单元、驱动单元、反馈单元等模块。
控制单元负责接收上位机指令,解析并生成控制信号;驱动单元根据控制信号驱动电机运动;反馈单元则将电机的实际位置信息反馈给控制单元,形成闭环控制。
2. 控制策略设计伺服控制器的核心是控制策略。
本文采用先进的PID(比例-积分-微分)控制算法,通过调整PID参数,实现对电机的高精度控制。
此外,为提高系统的动态性能和稳定性,还采用了前馈控制和扰动观测器等控制策略。
3. 硬件设计硬件设计是伺服控制器实现的基础。
根据实际需求,选用合适的微处理器、功率驱动器件、传感器等元器件,并合理布局电路,确保系统的稳定性和可靠性。
4. 软件设计软件设计是实现伺服控制器功能的关键。
采用C语言或汇编语言编写控制程序,实现控制算法、通信协议等功能。
同时,为方便用户使用,还需开发上位机软件,实现参数设置、状态监测等功能。
三、实现方法1. 硬件实现根据硬件设计图纸,制作伺服控制器的电路板,并将元器件焊接到电路板上。
为确保系统的稳定性和可靠性,需对电路板进行严格的质量检测。
2. 软件实现在微处理器上编写控制程序,实现控制算法、通信协议等功能。
同时,开发上位机软件,方便用户进行参数设置和状态监测。
在软件实现过程中,需注意程序的实时性和稳定性,确保系统能够快速响应上位机的指令。
3. 系统调试与测试完成硬件和软件实现后,需对系统进行调试和测试。
首先,对电路板进行电源测试、信号完整性测试等;其次,对控制程序进行功能测试、性能测试等;最后,对整个系统进行联调测试,确保系统能够正常工作并达到预期性能指标。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本文由promacho贡献doc文档可能在WAP端浏览体验不佳。
建议您优先选择TXT,或下载源文件到本机查看。
毕业设计论文1 绪论1.1 课题来源模拟生产实际课题:太阳能自动跟踪系统设计。
1.2 课题背景1.2.1 能源现状及发展能源是人类社会赖以生存和发展的物质基础。
当前,包括我国在内的绝大多数国家都以石油、天然气和煤炭等矿物燃料为主要能源。
随着矿物燃料的日渐枯竭和全球环境的不断恶化,很多国家都在认真探索能源多样化的途径,积极开展新能源和可再生能源的研究开发工作[1]。
虽然在可预见的将来,煤炭、石油、天然气等矿物燃料仍将在世界能源结构中占有相当的比重,但人们对核能以及太阳能、风能、地热能、水力能、生物能等可持续能源资源的利用日益重视,在整个能源消耗中所占的比例正在显著地提高。
据统计[2],20 世纪 90 年代,全球煤炭和石油的发电量每年增长 l%,而太阳能发电每年增长达 20%,风力发电的年增长率更是高达 26%。
预计在未来 5 至 10 年内,可持续能源将能够与矿物燃料相抗衡,从而结束矿物燃料一统天下的局面。
相对于日益枯竭的化石能源来说,太阳能似乎是未来社会能源的希望所在。
1.2.2 我国太阳能资源我国幅员广大,有着十分丰富的太阳能资源。
我国地处北半球欧亚大陆的东部,土地辽阔,幅员广大。
我国的国土跨度从南到北、自西至东,距离都在 5000km 以上,总面积达 960×10 km,占世界总面积的 7%,居世界第三位。
据估算[3],我国陆地表面每年接收的太阳辐射能约为50×10 KJ,全国各地太阳年辐射总量达335~837KJ/cm ·A,中值为586KJ/cm2·A。
从全国太阳年辐射总量的分布来看,西藏、青海、新疆、内蒙古南部、山西、陕西北部、河北、山东、辽宁、吉林西部、云南中部和西南部、广东东南部、福建东南部、海南岛东部和西部以及台湾省的西南部等广大地区的太阳辐射总量很大。
尤其是青藏高原地区最大,那里平均海拔高度在 4000m 以上,大气层薄而清洁,透明度好,纬度低,日照时间长。
例如被人们称为“日光城”的拉萨市,1961 年至 1970 年的平均值,年平均日照时间为 3005.7h,相对日照为 68%,年平均晴天为 108.5 天,阴天为 98.8 天,年平均云量为 4.8,太阳总辐射为 816KJ/cm2·A,比全国其它省区和同纬度的地区都高。
全国以四川和贵州两省的太阳年辐射总量最小,其中尤以四川盆地为最,那里雨多、雾多,晴天较少。
例如四川省省会成都市,年平均日照时数仅为 1152.2h,相对日照为 26%,年平均晴天为24.7 天,阴天达 244.6 天,年平均云量高达 8.4。
其它地区的太阳年辐射总量居中。
1824-12010 年 12 月毕业设计论文1.2.3 目前太阳能的开发和利用人类直接利用太阳能有三大技术领域[4],即光热转换、光电转换和光化学转换,此外,还有储能技术。
太阳光热转换技术的产品很多,如热水器、开水器、干燥器、采暖和制冷,温室与太阳房,太阳灶和高温炉,海水淡化装置、水泵、热力发电装置及太阳能医疗器具。
1.2.4 太阳能的特点太阳能作为一种新能源,它与常规能源相比有三大优点[5]:第一,它是人类可以利用的最丰富的能源,据估计,在过去漫长的 11 亿年中,太阳消耗了它本身能量的 2%,可以说是取之不尽,用之不竭。
第二,地球上,无论何处都有太阳能,可以就地开发利用,不存在运输问题,尤其对交通不发达的农村、海岛和边远地区更具有利用的价值。
第三,太阳能是一种洁净的能源,在开发和利用时,不会产生废渣、废水、废气,也没有噪音,更不会影响生态平衡。
太阳能的利用有它的缺点:第一,能流密度较低,日照较好的,地面上 1 平方米的面积所接受的能量只有 1 千瓦左右。
往往需要相当大的采光集热面才能满足使用要求,从而使装置地面积大,用料多,成本增加。
第二,大气影响较大,给使用带来不少困难。
1.3 课题研究的目的本课题研究一种基于光电传感器的太阳光线自动跟踪装置,该装置能自动跟踪太阳光线的运动,保证太阳能设备的能量转换部分所在平面始终与太阳光线垂直,提高设备的能量利用率。
1.4 研究课题的意义1.4.1 新环保能源长期以来[6],世界能源主要依靠石油和煤炭等矿物燃料,而这些矿物作为一次性不可再生资源,储量有限,而且燃烧时产生大量的二氧化碳,造成地球气温升高,生态环境恶化。
据国际能源机构预测,人类正面临矿物燃料枯竭的严重威胁。
这种全球性的能源危机,迫使各国政府投入大量的人力和财力,研究和开发新能源,如太阳能等。
能源危机,环境保护成为当今世界关注的热点问题。
据联合国环境规划署资料[7],目前矿物燃料提供了世界商业能源的 95%,且其使用在世界范围内以每 10 年 20%的速度增长。
这些燃料的燃烧构成改变气候的温室气体的最大排放源,按照可持续发展的目标模式,决不能单靠消耗矿物原料来维持日益增长的能源需求。
因此越来越多的国家都在致力于对可-22010 年 12 月毕业设计论文再生能源的深度开发和广泛利用。
其中具有独特优势的太阳能开发前景广阔。
日本经济企划厅和三泽公司合作研究认为,到 2030 年,世界电力生产的一半将依靠太阳能。
基于当今世界能源问题和环境保护问题已成为全球的一个“人类面临的最大威胁”的严重问题,本课题的目的是为了更充分的利用太阳能、提高太阳能的利用率,而进行太阳追踪系统的开发研究,这对我们面临的能源问题有重大的意义。
同时太阳能又是一种无污染的清洁能源,加强太阳能的开发,对节约能源、保护环境也有重大的意义[8]。
1.4.2 提高太阳能的利用率太阳能是一种低密度、间歇性、空间分布不断变化的能源[9],这就对太阳能的收集和利用提出了更高的要求。
尽管相继研究出一系列的太阳能装置如太阳能热水器、太阳能干燥器、太阳能电池等等,但太阳能的利用还远远不够,究其原因,主要是利用率不高。
就目前的太阳能装置而言,如何最大限度的提高太阳能的利用率,仍为国内外学者的研究热点。
解决这一问题应从两个方面入手[10],一是提高太阳能装置的能量转换率,二是提高太阳能的接收效率,前者属于能量转换领域,还有待研究,而后者利用现有的技术则可解决。
太阳跟踪系统为解决这一问题提供了可能。
不管哪种太阳能利用设备,如果它的集热装置能始终保持与太阳光垂直,并且收集更多方向上的太阳光,那么,它就可以在有限的使用面积内收集更多的太阳能。
但是太阳每时每刻都是在运动着,集热装置若想收集更多方向上的太阳光,那就必须要跟踪太阳。
香港大学建筑系的教授研究了太阳光照角度与太阳能接收率的关系,理论分析表明[11]:太阳的跟踪与非跟踪,能量的接收率相差 37.7%,精确的跟踪太阳可使接收器的接收效率大大提高,进而提高了太阳能装置的太阳能利用率,拓宽了太阳能的利用领域。
1.5 太阳能利用的国内外发展现状日本是世界上太阳能开发利用第一大国,也是太阳能应用技术强国。
日本太阳热能的[12] 利用,从 1979 年第二次石油危机后开始, 1990 年进入普及高峰。
太阳能技术日益创新,能量转换率不断提高,成本也是新能源中最低的。
日本将太阳能的利用分为太阳光能和热能两种。
太阳光能发电,是利用半导体硅等将光转化为电能。
从 2000 年起,日本太阳能发电量一直居世界首位,2003 年太阳能发电装机容量约为 86 万千瓦,占世界太阳能发电装机容量的 49.1%,并计划到 2010 年达到 482 万千瓦,增加约 6 倍。
德国对太阳能资源的利用可追溯到 20 世纪 70 年代,现在德国已经在太阳能系统的开发、生产、规划和安装等方面积累了大量经验,发明了一系列高效的太阳能系统。
1990 年德国政府推出了“一千屋顶计划”[13],至 1997 年已完成近万套屋顶系统,每套容量 1~5 千瓦,累计安装量已达 3.3 万千瓦。
根据德国联邦太阳能经济协会的数字,在过去的几年中,德国太阳能相关产品的产量增加了 5 倍,增速比其他国家平均水平高出一倍。
另据德新社报道,全球最大的太阳能发电厂已在德国南部巴伐利亚州正式投入运营。
这家太阳 -32010 年 12 月毕业设计论文能发电厂投资 7000 万欧元,占地 77 万平方米,发电总容量达 12 兆瓦,能为 3500 多个家庭供电。
截至 2005 年年底,德国共有 670 万平方米的屋顶铺设了太阳能集热器,每年可生产 4700 兆瓦的热量。
已用 4%的德国家庭利用了清洁环保、用之不竭的太阳能,估计每年可节约 2.7 亿升取暖用油。
目前,美国太阳能光伏发电已经形成了从多晶硅材料提纯、光伏电池生产到发电系统制造比较完备的生产体系。
2005 年,美国光伏发电总容量达到 100 万千瓦,排在日本和德国之后,居世界第 3 位。
为了降低太阳能光伏发电系统的生产成本,美国政府最近制定了阳光计划,大幅度增加了光伏发电的财政投入,加快多晶硅和薄膜半导体材料的研发,提高太阳能光伏电池的光电转化效率。
目前,美国正在新建几座新的太阳能电站。
预计到 2015 年,美国光伏发电成本将从现在的 21~40 美分/千瓦时降到 6 美分/千瓦时,届时,太阳能光伏发电技术的竞争力将会大大增强。
太阳能在能源发展中占有相当的优势,据美国博士对世界一次能源替代趋势的研究结果表明,到 2050 年后,核能将占第一位,太阳能占第二位,世纪末, 21 太阳能将取代核能占第一位,很多国家对太阳能的利用加强了重视[14]。
意大利 1998 年开始实行“全国太阳能屋顶计划”,将于 2002 年完成,总投入 5500 亿里拉,总容量达 5 万千瓦。
印度也于 1997 年 12 月宣布,将在 2002 年前推广 150 万套太阳能屋顶系统。
法国已经批准了代号为“太阳神 2006”的太阳能利用计划,按照该计划,每年将投入 3000 万法郎资金,到 2006 年,法国每年安装太阳能热水器的用户达 2 万家。
我国由建设部制定的《建筑节能“九五”计划和 2010 年规则》中已将太阳能热水系统列入成果推广项目。
目前我国太阳能热水器的推广普及十分迅速[15],1997 年销售面积近 300 万平方米,数量居世界首位。
全国从事太阳能热水器研制、生产、销售和安装的企业达 1000 余家,年产值 20 亿元。
根据我国 1996~2020 年太阳能光电 PV(光伏发电)发展计划,在 2000 年和 2020 年的太阳能光电总容量将分别达到 6.6 万千瓦和 30 万千瓦。
在联网阳光电站建设方面,计划 2020 年前建成 5 座 MW 级阳光电站。
由国家投资 1700 万元修建的西藏第三座太阳能电站——安多光伏电站,总装机容量100 千瓦,于 1998 年 12 月建成发电。