基于AD2S80A和AVR的圆感应同步器测角系统_邱子峰
一种基于AD2S80的测角系统的设计
同 时 集 定 时 计 数 器 、外 部 中断 检 测 、P、 S R 、 S IU A T WD T等 多 种 外 设 于一 体 , 在 线 编程 , 可 通 过 片 可 也 本 系统 采 用 70极 的感 应 同步 器 ,将 RP L 2 IP E
感 应 同 步器 的信 号 调 理 电路 共 有 4路 , 由前 置 上 B o odr ot ae 进行在系统编程 , L 便于使用[。 引 放大 、 通 滤波 、 带 二级 放 大 、 相 电路 等组 成 。 移 感 应 同 步器 本 身 是 一 种 低 阻抗 敏 感 元 件 , 热 C K接 到 IT 上作为度进位信号 , B ~ B 2 其 L N0 D 1D 1 作为
角系统。该 系统包括感应 同步器激磁 电路 、 号调理 电路 、 D S0电路 、 T g6 单片机 电路及上位机 串 信 A 28 A mea4
口数 据采 集软 件 等部 分 。整 个 系统具 有体 积 小 , 结构 简单 , 精度 高, 跟踪 速度 快 , 运行 稳 定 , 干扰 能 力强 以 抗 及操作 方便 、 数 直观等优 点 。 读
1. H 方 波 ,经 过 带 通 滤 波 器 选 频 成 同频 率 正 弦 m g6 08 z k ea4有 5 3个 可编 程 的 I 1 O I .工 作 于 5 电压 时 : V
D S0的 I O电平兼 容 ,可扩展外部存储 空间。 信号 , 然后 由 L 85 M17 功率放大后 , 作为圆感应 同步 与 A 2 8 器转子 的激磁信号[。 引
系统 工作时 , 要用 到霍尔 清零 、 按键 清零 和按
检 测 的多 极 电磁 感 应元 件 . 由于 多 极 结 构 对 误 差 起 环的方法 , 有效地提 高了系统 的动态跟踪速度 和精 补偿作用 , 因此 有 很 高 的 精 度 , 有 耐 恶 劣 环 境 、 具 运 度 [。 引 行 速度快 、 作稳定 可靠等优点 。 工 因此 基 于 圆感 应 同步 器 的位 置 测 量 系统 得 到广 泛 的应 用 …。
基于AD2S83的角位置检测系统及其在雷达伺服系统中的应用

6iWR NRYROW 输 入 #无 论 该 信 号 的 状 态 如 何 -下转第 +8页/
j +’j
电子工程师
测控技术与设备
WXYF(3ZXF4 (**(
[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[[
另外!计算机接入局域网或 "#$%&#%$后!可 以 远 程 登 录 到 上 位 机 !实 现 现 场 工 艺 的 远 程 监 控 !但 这 样 容易导致数 据 的 传 输 时 延 过 大!丧 失 监 控 系 统 的实时特性’
k引 言
基 于电磁感 应原理的 旋转 变压 器>GT_[‘aTWC是 一 种 精密微控制 电 机M在 雷 达 天 线 角 位 置 伺 服 系 统 中 M完 成 轴 角 位 移 信 息 的 检 测 功 能 N由 于 它 是 模 拟 机 电 元件M所 以M用 于 计 算 机 控 制 的 数 字 伺 服 系 统 中M 就 需 要 一 定 的 接 口 电 路 M即 旋 转 变 压 器 F数 字 变 换 器 >GHICM以实现 模拟量信 号到控制 系 统 数 字 量 的 转 换N随着电子技术的飞速发展M美国 JH公司已将它 发 展成为一系列 的 单 片 集 成 电 路M从 而 弥 补 了 过 去 由 分立元件搭成的 GHI体 积 大l可 靠 性 低 的 不 足M 给 工 程 应 用 带 来 了 极 大 的 方 便N由 旋 转 变 压 器 和 JH?KLB就 可 以 构 成 高 精 度 的 雷 达 天 线 角 位 置 检 测 系 统M而 且 JH?KLB输 出 的 模 拟 速 度 信 号 还 可 以 作 为速度反馈信号以构成雷达伺服系统中的速度回
AD2S80
摘 要 :A 2 8 D S 0是 美 国 A D公 司 生产 的 以 鉴 幅 方 式 对 感 应 同 步 器信 号 进 行 处 理 的 专 用 芯 片 。 由 它与 感 应 同 步 器构 成 的测 角 系统 具 有 成 本 低 、功 耗 小 、 所 需 外 部 元 件 少 、 可 靠性 好 等 优 点 。介
.
tm , c n tt t d b o v re n n u t s n, h s ma ) d a tg s s c s l w c s , lt e p we o s mp— e o s i e y c n e r a d i d co y u t a n ,a v n a e u h a o o t i l o rc n u t to in。 f w x e o o p n n s a d h g eibi t e e tr rc m o e t n i h r la l y.Th sp p ri to u e o e e ’ i s t e p ncp e o t i i i a e n r d c s c nv r r S p n , h r i l fi t i s c mp sn h n l e s rn y tm n h e in o x e o lcr — cr ui, a d prs ns a s h me d — o o i g t e a g e m a u g s se a d t e d sg fe tr re e to i i ic t n e e t c e e sg i g a n r me t la g e m e s in y t m . i n n i c e n a n l a ur g s se n Ke ywo d r s:Re o v r— t s le o— a ge c n e tr I u ts n;An l a u n y tm n l o v re ; nd co y ge me s r g s se i
基于MSP430的圆感应同步器方位测角系统[1]
![基于MSP430的圆感应同步器方位测角系统[1]](https://img.taocdn.com/s3/m/3ae8b0f9941ea76e58fa0417.png)
在分辨力设置好的情况下 ,正余弦两路角度信 号进入芯片时 ,AD2S80A 不需要任何命令就自动进 行数据转换 。此时 BU S Y 信号为高 , 数据正在转 换 ,不能进行读取 。BU S Y 为低时 ,因为 ENABL E接 地 ,控制 IN HIB IT信号可以读取数据 。数据通过 16 位或 8 位总线传输 。为简化电路 ,对数据的读取 ,利
· 11 ·
测量与设备
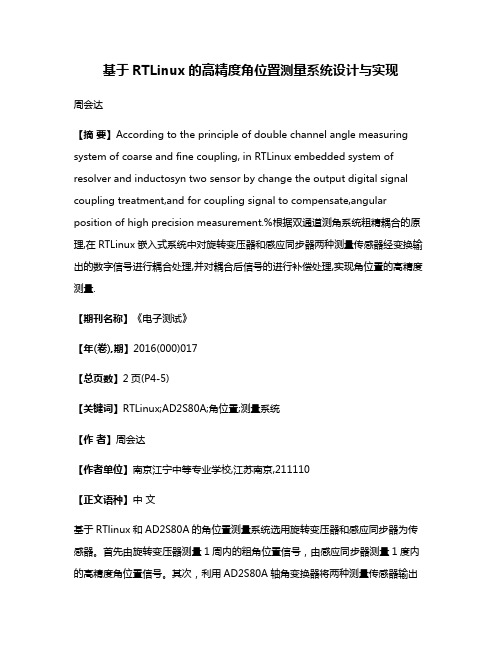
P (ω) 修正测量值 θ(ω) [5 ] ,原理如图 5 所示 。
图 5 误差补偿示意图
φ为真值 ;φ′为补偿后的输出 ;μ(ω) 为测量值 的期望值 ;误差补偿后 φ′的期望值为
E (φ′) = E[θ(ω) ] - P (ω) = μ(ω) - P (ω) (8) φ- E (φ′) = φ- μ(ω) + P (ω) = P (ω) - Δ(ω)
系统转速不为零时 ,输出不能完全跟踪输入 ,由 转速引起的动态误差需要进行补偿 。
补偿的方法是测出系统在不同转速 ωi 下的动 态误差Δ(ωi) ,用最小二乘法拟合误差曲线 P (ω) ,
k
6 使 [Δ(ωi) - P (ωi) ]2 最小 , 得到 P (ω) 后 , 用 i =1
计量技术 20071No 9
测量与设备
基于 MSP430 的圆感应同步器方位测角系统
李海斌 蔡 伟
(第二炮兵工程学院 二系 ,西安 710025)
摘 要 为了克服一般光学经纬仪读数不便的弱点 ,实现在不同转速下对方位角的精确测量 ,设计了基于 MSP430 的圆感应同步器方位测角系统 。根据系统工作原理 ,设计时采取了完善的硬软件措施 ,减小可能给系统带 来的误差 。整个系统电路简单 ,结构紧凑 ,精度高 ,抗干扰能力强 ,在恶劣环境工作可靠 ,具有操作方便 、读数直观 的特点 ,能良好满足实际要求 。文章介绍了设计的基本原理 ,并给出了系统的相关电路和软件设计 。
基于AD2S82A的轴角信号处理和传输
和转子 中。转子 的 2组绕组分别叫正弦绕 组和余 弦绕
组, 定子 的 2组绕 组 叫激磁 绕组 和交 轴绕组 。采用 单 相激磁绕组 , 当加 上正弦激磁 电压 u=Us t nc 在定 子 io 绕组 上后 , 分别感应 出交流 电势从 正弦绕组 和余 弦绕
组中:
V = V c s sn t ቤተ መጻሕፍቲ ባይዱ m o 0 i c o
硬件 和必要 的软件 完成 了信息 的采集 、 数据 的模 数转
将 和 在高速乘法器 中分别与测角系统的输 出角度 的正弦和余弦相乘得到 :
V a = V c s sn ti m o 0 i c sn o V b : V sn sn t o m i O ic c s o
制科学与工程应用 ; 杨
哗, 研究员 , 研究方向为惯性 技术与应用。
・
12・ 9
计算机技术与发展
第2 1卷
子绕组 的电磁藕合 系数 , 为可逆 计数器 中的数字角 度 ,e u 为输入 角和输 出角之 间的误差 函数 ) 而后将 u , e 送人带 通滤 波器 , 相敏 解调后 得 到 的误 差信 号 为 : 经 U =]Vo ( 一 ( e I cs ) 后 为各阶放大倍 数与电磁耦合 系 } 数 的乘积 ) 经过校正环节 , V O中产生与输入控 , 在 C 制信 号幅值成 比例 的脉 冲序列 , 用可 逆计数 器 中对该 脉冲序列被进行增 和减计数 可判断 的输 出是否 为 零 , 为零此 时闭环 系统稳定 后 ,可逆计 数器 中的数 若
列单片机 , 但速度快 8—1 , 2个 1 2倍 共 6位定时器/ 计
数器 , 有通用异步串行 口 U R 是 高速 / A T, 低功耗 的新
基于AD2S80A的高精度测角测速系统设计
C L sdt i l e toi it f ebte nA 2 8 A adD P S sdt i pe e t geps P D ue e n gc ne a e e D S 0 n S ,D Pue lm n al oi o mp m l r c w om n —
摘
要 :采用双 通道 多极旋 转变压 器和 A 2 8 A构成 的测角 系统 可 以实 现 角位 置和 角速 度 的高 D S0 精度动态测量。介绍 了这 种测角系统的组成和工作原理。采用单片机 实现角位 置的动态监控 , 使用 C L 完成 了 A 28 A 与 D P通信 的接 口逻辑 设计 ,并 采用 D P实现 双 通道 角位 置粗 精 耦 PD D S0 S S
当在转 子 绕 组 上加 上 正弦 激 磁 电 压 u=U iw 后 , s t n
其伺服的精度则一般决定于角位置和角速度的测量
精度 。一 般 比较简 单 的高精 度测 角 系统 采用 光 电编 码器 ,如增 量式 编码 器 、绝 对式 编码 器 或者 正余 弦 编码 器 ,测 速 方 法 采 用 M 法 、T法 、M T法 或 变 / M T法等动态测量 方 法来实 现 。但 在 高精 度 的测 角 /
合及 测速 算法 。
关键词 :旋转 变压器 ;A 28 A;R C;测 角 系统 ;粗精 耦合 D S0 D
m g Pr cso Ange a d lc t e s i y t m s d o AD2S 0A h e ii n l n Veo iy M a urng S s e Ba e n 8
徽 电 机
中图分类号 :T 3 3 2 M 8 . 文献标 志码 :A 文章编号 :10 -8 8 20 )00 5 -4 0 164 (0 8 1.000
基于DSP和AD2S80的绝对式感应同步器测角系统

0 引言
1 测 角 系统 工作 原 理 及 实现 方 案
测角系统是转 台系统 中最重要 的组成部分之 一 , 航天地 是 面测试系统 、 工业精 密控制 系统 等不可 缺少 的要组 成部 分。 圆感应 同步器是一种 角度检测 的多极电磁感应 器件 , 有精度 具
该系统粗精双通道感应同步器均采用单 相转子激 励 , 两相
定子绕组输 出的鉴幅工作方式 。工作原理 如下 : 圆感应 同步 设
器转子激励信号为
适 合在 恶 劣 环境 工作 , 有很 高的 实用 价值 。 具
关键词 : 绝对式感应 同步 器; 角; D S0 D P 动 态误差 测 A 28 ;S ;
中 图 分 类号 :H 2 T 82 文 献 标 识 码 : A 文 章 编 号 :0 2一】4 (0 0 0 0 6 10 8 1 2 1 )8— 00—0 3
仪 表 呲
技
e
Ab o u e I d c o y g e M e s r me tS se Ba e n DS n s l t n u t s n An l a u e n y tm s d o P a d AD2 8 0 S
Q uz— n 。 .IWe—u 。X i—e g I ieg一 L nha . U Bnpn f
术 _ 5
与
2 Grd aeU ies y C ieeA a e f c n e, e ig1 03 C ia . a u t nv ri , hns cd myo i csB in 0 09, hn ) t Se j
Ab t a t Ba e n a s l t d c o y sa g e s n o , sn 2 8 n P t r c s h in l u i gt e w y o oe s r c : s d o b ou e i u t s n a n l e s r u ig AD S 0 a d DS p o e s t esg a , s h a f n o n wh l o e o p a d s n lp o e s p r c o e o t e a s l t n u a mp i d — ee t a u e n y tm sd sg e . h sp p r p n lo n i a r c s at ls d l p, b o ue a g lra l u e d t c g o h t me s r me t s s e wa e in d T i a e d ti dy d s u s d t e h r w r fte s s m ,h i u t n l ssa d t e s p t a w s u e o h ih e h u n n p e n ea l l ic s e h a d a e o y t e h e t e cr i a ay i n h t h t a s d t eg tn te r n ig s e d a d c e mi i h y a ce r r T e s s m a h i u so i l tu t r , o k n t bl y h g r cso a d b t rn ie i n s t e d n mi ro . h y t h ste vr e f mp e sr cu e w r ig sa i t , ih p e iin, n et o s h e t s i e mmu i n—
一种基于AD2S83芯片的转子位置及速度检测单元

一种基于AD2S83芯片的转子位置及速度检测单元
陈洁;王洪诚;孟苹苹;陈刚
【期刊名称】《电工电气》
【年(卷),期】2011(000)004
【摘要】提出了一种基于AD2S83芯片和旋转变压器-数字转换器的转子位置和速度测量模块的设计原理和实现方法,该模块以旋转变压器作为角位置传感器,利用AD2S83芯片对其输出的正余弦信号进行解算,主控单元采用TMS320F2812芯片,实现对角位置的实时测量并计算出角速度,作为伺服控制系统中的速度环和位置环的反馈变量对速度和位置进行实时控制.实验证明,该电路不仅完全达到了设计要求,而且系统工作稳定可靠,硬件电路简单,抗干扰能力强,可长期工作于恶劣的环境.【总页数】3页(P26-28)
【作者】陈洁;王洪诚;孟苹苹;陈刚
【作者单位】西南石油大学,电气信息学院,四川,成都,610500;西南石油大学,电气信息学院,四川,成都,610500;西南石油大学,电气信息学院,四川,成都,610500;西南石油大学,电气信息学院,四川,成都,610500
【正文语种】中文
【中图分类】TM383.2
【相关文献】
1.基于旋转变压器及AD2S83的位置检测单元 [J], 韩军;周理兵;马志云;黄声华
2.一种转子位置传感器无刷直流电机速度检测方法 [J], 张益
3.基于A D 2 S 1210的电机转子位置和速度检测电路设计 [J], 康嘉斌;周盼
4.基于AD2S83的永磁同步电机转子位置检测电路设计 [J], 刘伟奇;张玉玲;皮利萍;韩继文;朱大宾
5.一种基于DSP的PMSM转子位置及速度估计新方法 [J], 张剑;温旭辉;刘钧;华旸
因版权原因,仅展示原文概要,查看原文内容请购买。
基于圆感应同步器的高精度角度测量系统
关键 词 : 圆感应同步器; 角度测量; 鉴幅型; 轴角数字转换器 ; 高精度
中图分类号 :M 33 2 , 8. I
文献标 识码 : A
文 章编号 :0599 (07O -230 10—4O 20 )10 6.4
采用连续绕组激磁 , 双相分段绕组输出的鉴幅 型工作方式的感应 同步器 , 具有轴角转换精度高 , 抗 干扰能力强 , 转换速度 陕, 以及对激磁电源要求不高
r q ie e t ,whc n u a e o u in o ip a s0 1 n a u i g e r ro n l i 士 O 3” e urm n s ih a g lrr s lto fds ly i . ”a d me s rn r o fa ge s . .
测量系统. 根据圆感 应同步器和轴角数字转换器 的工作 原理 , 对系统 的核心器件
量误差为士03 , . ”达到设计要求.
SO 8A芯片 的外 围元件参数进行了合理优
化, 并且设计 了一种高精度、 低噪声的前置放大 电路提高系统 的抗干扰性 能. 实验结果表 明系统显示角度分辨率为 0 1 , . ”角度测
的抗干扰性能要求苛刻 , 令实现 1 i数字信号的 6bt 稳定输出和转换精度成为测角电路的设计难点.
本文介绍了基于圆感应 同步器的以轴角数字转
基于AD2S80A的永磁同步电动机高精度位置检测系统

( n nIs tt o nie r g i ga 1 1 hn ) Hu a ntue fE g ei ,X a t 4 0 ,C ia i n n n n 1 1
Ab t a t T e r s l e o i i l o v r r AD S 0 n t e c n e t n f i p rp ea cr u t e e sr c : h e o v r t d gt c n et 2 8 A a d h o n ci o t ei h rl ic i a e o s w r i t d c d,t e n ef c c ru t e w e nr u e o h i tr e ic i a b t e n AD2 8 A n D P T 3 0F 4 w s e in d, te i h c u a y S 0 a d S MS 2 2 0 a d sg e h h g a c rc
关键词 :永磁 同步 电动机 ; 位置检测 ; 高精度 中图分 类号 : P2 3 文献标识码 : 文章编号 :0 15 3 (0 6 0 -0 5 3 T 7 A 10 —5 1 20 )90 2 - 0
第一 作 者 : 葵 银 赵
( 9 8 ) 男 , 教 16一 , 副
授 , 士 , 究 方 向 硕 研
0 引 言
永 磁 同步 电动 机控 制 系统 的关 键技 术之 一 是 转 子 位置 的检 测 ¨ , j只有 检 测 出转 子 实 际 空 间 位 置 ( 对位 置 ) , 制 系 统 才 能决 定 变 频 器 的通 绝 后 控
(0 16 C T S2 F4 ) 控 制芯 片 的 接 口。 8 C 9 M , M 30 2 0 等 本文着 重介 绍 了基 于旋 转 变 压 器 和 A 2 8 A D S0 R C的高精度位置检测系统 的设计 与实现方法。 D
基于AD2S83的角位置检测系统及其在雷达伺服系统中的应用
e ^= E C S s n c ・ + ) O Oi( o f
() 1 () 2
1 引
言
e = E sn i c f+ Ⅱ i & n( o・ )
基 于 电磁 感 应 原 理 的 旋 转 变 压 器 ( eov r 是 R s le )
一
其 中 , 旋 变 的 转 子 转 角 , 为 次 级 电 动 势 与 初 级 0为
发 展 成 为 一 系 列 的 单 片 集 成 电 路 , 而 弥 补 了 过 去 从 由 分 立 元 件 搭 成 的 RD 体 积 大 、 靠 性 低 的 不 足 , C 可 给 工 程 应 用 带 来 了 极 大 的 方 便 。 由 旋 转 变 压 器 和
AD2 8 S 3就 可 以 构 成 高 精 度 的 雷 达 天 线 角 位 置 检 测 系 统 , 且 AD2 8 而 S 3输 出 的 模 拟 速 度 信 号 还 可 以 作
励 磁 电 压 之 间 的 相 位 角
种 精 密 微 控 制 电 机 , 雷 达 天 线 角 位 置 伺 服 系 统 在
中 , 成 轴角位 移信 息 的检测功 能 。 完 由于 它 是 模 拟 机 电元件 , 以 , 于计 算 机 控制 的 数字 伺 服 系统 中. 所 用 就 需 要 一 定 的接 口 电路 , 旋 转 变 压 器 一 字 变 换 器 即 数 ( DC , 实 现 模 拟 量 信 号 到 控 制 系 统 数 字 量 的 转 R )以
件, 其定 、 转子上 都 有绕 组 , 彼此 同心 安排 , 互相耦 合
联 系 , 转 变 压 器 采 用 正 交 的 两 相 绕 组 , 主 要 用 于 旋 它 角 度 位 置 伺 服 控 制 系 统 中 , 为 角 度 位 置 的 产 生 和 作 检 测 元 件 。 旋 变 的 励 磁 电 压 为 U, U . ir t则 若 一 jsn o・ .
一种基于AD2S83芯片的转子位置及速度检测单元

一种基 ] D S 3c I转子位置及速瘦捡铡单元 = 28 , { A % 勺 '  ̄
一
种 基 于A 2 8 芯 片 的转 子 位 置 及 速 度检 测 单 元 DS3
陈 洁 ,王 洪 诚 ,孟 苹 苹 ,陈 刚
( 西南石油 大学 电气信 息学院 ,四川 成都 6 5 0 1 O) 0 摘 要 :提 出了一种甚于A 2 8 ; D S 3G片和旋转变压器一数字转 换器的转 了位置和速度 测量模块的设计
sn n o i e sg a s i e a d c sn i n l.Th i o to n ta o t d TM S3 0F 81 o r a i e r a—i e s r me ta d c l u a i n o n l o i o e ma n c n r lu i d p e 2 2 2 t e l e ltme m a u e n n a c lto fa g e p st n z i
Ab t a t s r c :Th sp p r r i e i d o o o st n p e a u e n o l ’ e i n p i i l n c i v n t o s d O i a e a s d a k n fr t rpo ii a d s e d me s r me tm du e S d s g rnc p e a d a h e i g me h d ba e n on
原 理 和 实 现 方 法 , 该模 块 以旋 转 变 压 器 作 为 角 位 置传 感 器 ,利 用 A 2 8 芯 片 对 其 输 出 的 正余 弦 信 号进 行 D S3
解 算 ,主控 单元采 用T S 2 F 8 2 片,实现对 角位 置的实 时测量并计 算 出角速 度 ,作 为伺服控制 系统 M30 21芯
基于RTLinux的高精度角位置测量系统设计与实现
基于RTLinux的高精度角位置测量系统设计与实现周会达【摘要】According to the principle of double channel angle measuring system of coarse and fine coupling, in RTLinux embedded system of resolver and inductosyn two sensor by change the output digital signal coupling treatment,and for coupling signal to compensate,angular position of high precision measurement.%根据双通道测角系统粗精耦合的原理,在RTLinux嵌入式系统中对旋转变压器和感应同步器两种测量传感器经变换输出的数字信号进行耦合处理,并对耦合后信号的进行补偿处理,实现角位置的高精度测量.【期刊名称】《电子测试》【年(卷),期】2016(000)017【总页数】2页(P4-5)【关键词】RTLinux;AD2S80A;角位置;测量系统【作者】周会达【作者单位】南京江宁中等专业学校,江苏南京,211110【正文语种】中文基于RTlinux和AD2S80A的角位置测量系统选用旋转变压器和感应同步器为传感器。
首先由旋转变压器测量1周内的粗角位置信号,由感应同步器测量1度内的高精度角位置信号。
其次,利用AD2S80A轴角变换器将两种测量传感器输出的模拟信号转换为相应的数字信号。
最后,根据双通道测角系统粗精耦合的原理,在RTLinux中通过对信号的耦合和补偿处理,实现1周内的高精度角位置信号测量。
基于RTlinux和AD2S80A的角位置测量系统主要包括旋转变压器、感应同步器、AD2S80A轴角变换器、接口转换电路和RTlinux嵌入式处理平台,它们之间的基本关系如图1所示。
基于RTLinux和AD2S80A的角位置测量系统设计与实现
基于RTLinux和AD2S80A的角位置测量系统设计与实现沈维芳【期刊名称】《信息安全与技术》【年(卷),期】2012(003)010【摘要】基于RTlinux和AD2S80A的角位置测量系统,选用旋转变压器和感应同步器作为测量系统的传感器,利用AD2S80A轴角变换器将两种测量传感器输出的模拟信号转换为相应的数字信号。
根据双通道测角系统粗精耦合的原理,在RTLinux嵌入式系统中对两种数字信号进行耦合处理,并对耦合后信号的进行补偿处理,实现角位置的高精度测量。
检测数据表明,这种测量系统可以实现以内的测量精度。
%Rotary transformer and inductosyn are chosen as sensors in the angle measuring system which is based on RTLinux and AD2S80A. The resolver-to-digital converter AD2S80A is used to convert analog signal into corresponding digital signal, and the analog signal is generated by the two sensors. Then, digital signal will be combined and compensated in the RTLinux embedded system by the combination for coarse-fine coed principle. Detected data has effectively improved that this measuring system can realize an measuring precision within.【总页数】4页(P59-62)【作者】沈维芳【作者单位】江苏省如皋中等专业学校,江苏如皋226500【正文语种】中文【中图分类】TP334.7【相关文献】1.基于AD2S80A和AVR的圆感应同步器测角系统 [J], 邱子峰;李文华;许斌鹏2.基于FPGA和AD2S80A的数字测角系统 [J], 何俊;李文华3.基于AD2S80A的高精度测角测速系统设计 [J], 王兴华;孙纯祥;周成岩4.基于AD2S80A的双路RDC测角系统及接口设计 [J], 郑力;卢刚;李声晋5.基于RTLinux的高精度角位置测量系统设计与实现 [J], 周会达因版权原因,仅展示原文概要,查看原文内容请购买。
基于AD2S83的角位移测量模块设计
基于AD2S83的角位移测量模块设计
徐建华;杨瑞峰
【期刊名称】《微计算机信息》
【年(卷),期】2008(24)19
【摘要】提出了一种基于旋转变压器一数字转换器AD2S83的角位移测量模块的设计原理及实现方法.该模块以旋转变压器作角位移传感器,利用AD2S83对旋转变压器输出的正余弦信号进行解算,主控单元则采用了,TI公司生产的
DSPTMS320LF2407A,时钟频率40MHz,可以实现对角位移信号的实时测量.【总页数】3页(P183-184,142)
【作者】徐建华;杨瑞峰
【作者单位】030051,太原,中北大学仪器科学与动态测试教育部重点实验
室;030051,太原,中北大学仪器科学与动态测试教育部重点实验室
【正文语种】中文
【中图分类】TH712
【相关文献】
1.基于AD2S83的双通道旋转变压器位置检测模块设计 [J], 庄文许;马大为;翟小晶;孙德
2.基于感应同步器的角位移测量智能节点设计 [J], 郭嘉;范镇南
3.基于STM32的氧含量测量模块设计 [J], 陈翔; 杨广春; 徐鹏
4.基于模块化设计的堆芯中子通量测量系统 [J], 黄有骏;韦文彬;杨戴博;李昆;王银
丽
5.基于STM32F4动中通姿态测量模块设计 [J], 陈著明;赵自知
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2010年 第5期仪表技术与传感器Instrum ent T echn i que and Sensor 2010 N o 15收稿日期:2009-10-29 收修改稿日期:2009-12-05基于AD2S80A 和AVR 的圆感应同步器测角系统邱子峰1,2,李文华1,许斌鹏1(1.中国科学院西安光学精密机械研究所,陕西西安 710119;2.中国科学院研究生院,北京 100039)摘要:为了实现对角度的高速高精度测量,以圆感应同步器作为角度传感器,以AD2S80A 为轴角转换器,以AVR 单片机为数字信号处理器设计了测角系统。
在阐述系统工作原理的基础上,给出了系统的相关电路和软件设计。
整个系统具有体积小,结构简单,精度高,跟踪速度快,抗干扰能力强,在恶劣环境工作可靠,操作方便、读数直观的优点。
实验结果表明,该系统具有很高的动态和静态精度,完全满足了设计要求。
关键词:圆感应同步器;测角;AVR;AD 2S80A;鉴幅测量中图分类号:TH 822 文献标识码:A 文章编号:1002-1841(2010)05-0108-03AngleM easuring Syste m of Inductosyn Based on AD2S80A and AVRQ IU Z-i feng 1,2,L IW en -hua 1,XU B i n -peng 1(1.X i p an Institu te of Op tics and Precision M echan ics ,Ch i n ese Acadcmy of Sc iences ,X i p an 710119,Ch i na ;2.G raduate Un i versity ,Ch i n ese Acad e my of S cien ce s ,Be iji n g 100039,Ch i na)Abstract :In o rder to m easure ang le fast and prec i sely ,usi ng i nduc t o syn as ang le sensor ,using AD2S80A as reso lver -to -dig ital converter and usi ng AVR M CU as DSP co m bi n i ng ,the ang le m easurement syste m w as desi gned .A fter show i ng the opera ti on pr i nc-i p l e ,the assoc iated circu itry and so ft w are desi gn w ere presen ted .T he syste m has t he fo llow i ng v i r t ues of s m a ll vo l um e ,si m ple struc -ture ,hi gh prec isi on ,fast track i ng speed ,better no ise i m munity ,w orki ng stab ilit y i n the hard circum stances ,and easily operati ng and reading .The practi ce sho w s tha t the syste m has t he high dyna m ic track prec i s i on and static track prec isi on ,it mee ts the desi gn re -qu ire m ents f u ll y.K ey word s :i nductosyn ;ang le m easure m en t ;AVR;AD 2S80A;amp litude -de tect measure m ent 0 引言测角系统是航天地面测试系统、工业精密控制系统等不可缺少的重要组成部分。
圆感应同步器是一种角度检测的多极电磁感应器件,具有精度高、结构简单、运行速度快、抗恶劣环境能力强、工作稳定可靠等特点,广泛应用于航空航天、机械制造、精密仪器、计量等部门[1]。
AD 2S80A 是一种专用的轴角转换器芯片,采用比值跟踪的转换方式,具有单片高度集成、分辨率可变、低功耗、精度及可靠性高等优点。
AVR 系列单片机采用精简指令集R ISC 结构,有32个类似于累加器A cc 的通用工作寄存器直接和运算器相连,速度是同频率51单片机的25~40倍。
集U SART 、SP I 、TW I 、W DT 、EEPROM 等多种外设于一体,便于使用。
而且它可反复编程修改,保密性能好,通过片上Boot L oader 可以灵活地进行应用软件升级[2]。
文中设计了以圆感应同步器作为角度传感器,以AD2S80A 为轴角转换器,以AVR 单片机为数字信号处理器的高精度测角系统。
应用鉴幅型开环测角系统原理,采取整体开环,数字信号处理部分闭环的方法,有效地提高了系统的动态跟踪速度和精度。
设计中软件实现了360极和720极两种工作方式的切换以及对角度的清零和手动置数等功能,方便了系统的应用。
1 测角系统工作原理及实现方案该系统采用感应同步器单相转子激励,采用两相定子绕组输出的鉴幅工作方式。
工作原理如下:设圆感应同步器转子激励信号为j i =u m si n X t将两相绕组输出电动势u si 、u c i 送入到感应同步器测角系统的输入端,经过前置放大、带通滤波、二级放大、移相、电压跟随后信号变为u s =k v u m si n H e si n X t u c =k v u m cos H e s in X t 式中:u m 是励磁电压的最大幅值;X =2P f 是激磁信号的角频率;f 是基准频率,系统中f 为10k H z ;H e 是圆感应同步器对应的电角度。
相互正交的信号u s 和u c 进入AD 2S80A 后,经过高精度正余弦乘法器将输入信号与来自可逆计数器的数字角度<对应的正余弦信号进行相乘,其输出端为u a =u s cos <u b =u s cos <将u a 、u b 送入误差放大器中,得到输入角度和输出角度之间的误差函数u e =k si n X t si n(H e -<)式中:k 为k e k v u m 的乘积;k e 为误差放大器的放大倍数[3]。
u e 经过积分环节送入压控振荡器(VCO ),压控振荡器产生与输入控制信号幅值成比例的脉冲序列,该脉冲序列被送入可逆计数器进行增或减计数,计数的方向由相敏环节输出的方向确定。
闭环系统稳定后,u e 的输出为零,此时可逆计数器中的数字角<就等于感应同步器当前的实际转角。
<再经数据处理单元转换成需要的数据类型输出[4]。
第5期邱子峰等:基于AD 2S80A 和AVR 的圆感应同步器测角系统109将A D2S80A 输出的数字角度信息送入AVR 单片机中,通过软件处理就可以经串口输出角度值到上位机。
为方便观察,用AT 89C51在外面搭一个用于显示的显示板,原理就是将AVR 单片机编码后的串口输出的数据进行解码并驱动七段数码管显示。
具体实现方案如图1所示。
图1 测角系统总体结构图2 系统硬件电路设计2.1 激磁电路激磁电路为感应同步器连续绕阻(转子)提供标准正弦波,同时也作为AD2S80A 的参考信号。
正弦波信号的波形失真容易导致转换误差。
为获得失真小,相位、幅值、频率都符合要求的波形,设计采用AVR 系列单片机ATm ega8和数模转换器AD 667,通过程序产生频率10k H z 的正弦波。
功率放大采用M S K 2541,其失真小,驱动功率大,保证激磁信号可以驱动感应同步器正常工作。
为了减小外界对激磁信号的干扰,最好用双绞屏蔽线将激磁信号引入感应同步器转子。
2.2 前置放大感应同步器的输出信号微弱,一般在2mV 以下,抗干扰能力很差,必须将该信号进行放大。
将此微弱电压信号进行变压器耦合升压,其幅值将达到100mV.2.3 滤波、二级放大、移相、电压跟随信号在感应同步器转子和定子之间的感应过程中,由于外界电磁场干扰、器件自身噪声等原因,信号中参杂有不同频率的噪声,感应出的微弱电压信号在传输时也易受到外界干扰,必须进行滤波。
滤波电路采用二阶压控电压源带通滤波器(BPF ),设置其中心频率在10k H z .二级放大采用低噪声运算放大器OP27,将产生的正余弦感应信号放大到峰峰10V 。
信号经放大、滤波后必然会有相位移动,所以必须进行相位校正,采用一阶全通滤波器(A PF),即移相电路,对两路正余弦信号进行相位矫正,使其正交化。
然后将处理过的信号通过电压跟随器,以便使输出信号稳定,也为了增加其驱动能力。
2.4 AD2S80A 电路在电路连接好后,AD2S80A 就运行于Ò型双积分的闭环伺服系统方式。
16条数据线输出可由BYTE SELECT 、DATA LOAD 、I NH IBI T 等引脚进行控制,输出BU S Y 信号表示数据输出是有效还是无效,输出D IRN 信号表示感应同步器是正转还是反转,输出R IPPLE CLK 表示感应同步器转过了1个节距,还可以输出与速度成正比的模拟信号代替测速发电机。
2.5 单片机接口电路系统设计了可以使用于360极和720极两种感应同步器的两种工作方式。
对于360极圆感应同步器,选择14位分辨率的工作方式,跟踪速度可达到130b /s ,分辨率为0.44d ,1个节距为2b ,将DB1接到I NT0上作为度进位信号,DB2~DB13作为分秒的输入;对于720极圆感应同步器,选择12位分辨率的工作方式,跟踪速度可达到260b /s ,分辨率为0188d ,1个节距为1b [5],将R IPPLE CLK 接到I NT 1上作为度进位信号,DB1~DB12作为分秒的输入。
这样通过数据线、R I PPLE CLK 、D I RN 等信号,单片机就可以输出360b 范围内的所有角度。
系统工作时,往往要用到清零和手动置数的功能。
单片机将这两个按键接到两个管角上。
手动置数需要24位的二进制输入。
为了节省单片机的I O 口,用3片74L S165进行并转串的输入,同时将3个S H /LD 管角都接到单片机的一个I O 口上,单片机可以模拟74LS165的时序将数据读入。
为了实现长距离数据的有效传输,更有效地抑制外部的干扰,串口使用422电平向外发送。
R S422芯片使用M ax i m 公司的MAX 488进行电平转换。