电涡流位移传感器 eddyNCDT-3010--de-en
米朗科技电涡流位移传感器说明书

电涡流传感器系统的工作原理是电涡流效应,属于一种电感式测量原理。
电涡流效应源自振荡电路的能量。
而电涡流需要在可导电的材料内才可以形成。
给传感器探头内线圈导入一个交变电流以在探头线圈周围形成一个磁场。
如果将一个导体放入这个磁场,根据法拉第电磁感应定律激发出电涡流。
根据楞兹定律,电涡流的磁场方向与线圈磁场正好相反,而这将改变探头内线圈的阻抗性能参数测量量程1mm 2mm 4mm 5mm 12.5mm 20mm 25mm 50mm探头直径Φ6mm Φ8mm Φ11mm Φ17mm Φ30mm Φ40mm Φ50mm Φ60mm线性误差≤±0.25 ≤±0.25 ≤±0.5 ≤±0.5 ≤±1 ≤±1 ≤±1 ≤±2 (%FS)分辨率0.05um 0.1um 0.2um 0.25um 0.625um 1.0um 1.25um 2.5um重复性0.1um 0.2um 0.4um 0.5um 1.25um 2.0um 2.5um 5um频率响应0~10KHz 0~8KHz 0~2KHz 0~1KHz (-3dB)输出信号0~5V,0~10V,4~20mA,RS485电压型+9~18VDC,+18~36VDC或±15V~±18VDC可选供电电压电流型+22~30VDC,RS485型+12VDC电压型<45mA工作电流电流型<25mARS485型<40mA纹波≤20mV系统温漂≤0.05%/℃静态灵敏度根据输出信号和对应量程而定电压输出:负载能力<10KΩ输出负载电流输出:负载能力<500Ω标定时(20±5)℃环境温度探头-30℃~+150℃使用温度前置器-30℃~+85℃探头 IP67防护等级前置器 IP65探头电缆默认2m,可定制电源电缆默认2m,可定制接线定义电流型电压型RS485 棕线电源正 +24VDC 电源正 +12VDC或+24VDC 电源正 +12VDC黑线空电源负 0V 电源负 0V蓝线电流输出 OUT 输出正 OUT+ RS485 A+白线空输出负 OUT- RS485 B-屏蔽线接大地 GND 接大地 GND 接大地 GND探头典型结构图示在制作过程中,探头头部体一般采用耐高温ABS+PC工程塑料,通过“二次注塑”成型将线圈密封其中。
电涡式传感器

5芯M12插头:
针 1 2 颜色 棕色 绿色 描述 供电电源 24 V 位移信号
Standardausführung 白色 信号地 3
DT3001-SA
4
测量侧 ø10,5
11,5 17,6 71,5
8
DT3001-Cx
4 ø4,3 11,5 28,6 82,5 12
插头侧
M12x1
SW19
尺寸单位mm, 不按比例
5
型号 量程 零位 绝对误差 分辨率 响应频率 温度稳定性 温度补偿范围 环境温度 装配 被测金属 被测物体几何尺寸 插头 输出信号 供电电源 防护等级 重量
FSO = Full Scale Output
DT3001-U4A/M-SA 4 mm 0,4 mm ≤±0.7 % FSO 静态,量程中点 0,1 % FSO 5 kHz 0,03 % FSO 0°C…+70°C 0°C…+70°C 非屏蔽
电涡流位移传感器 德国米铱公司在电涡流测量技术领域拥有多 年的经验。其设计的电涡流位移传感器采用 非接触式测量方式,用于测量间距,位置, 位移,振动等需要高精度的测量领域,测量 精度可达亚微米等级。
3
极高的稳定性、坚固的结构和超高精度:eddyNCDT 电涡流探头 德国米铱公司提供的电涡流探头可以被应用于众多应用领域,特别是环境特殊的应用领域, 如需要耐受高温和高压的测量任务。众多的型号选择允许客户为各自的应用领域选取最佳的 探头。 微型探头 得益于线圈几何尺寸的缩小和创新的制造技术,微型电涡流探头eddyNCDT可以实现几毫米的 外形尺寸。 电涡流探头优势: 耐压高达 2000 bar -40 至 200 °C 温度稳定性 (高于此温度范围的情况请致电查询) 最小仅 2 mm 的探头外形尺寸 紧固耐用的结构设计,防护等级达到 IP67 适合温度波动环境 对传感器探头,电缆和控制器进行主动温度补偿 极高的温度稳定性,仅有0,015 % /°C
(整理)电涡流传感器技术说明

电涡流位移、振动传感器第一节概述电涡流传感器能静态和动态地非接触、高线性度、高分辨力地测量被测金属导体距探头表面的距离。
它是一种非接触的线性化计量工具。
电涡流传感器能准确测量被测体(必须是金属导体)与探头端面之间静态和动态的相对位移变化。
在高速旋转机械和往复式运动机械的状态分析,振动研究、分析测量中,对非接触的高精度振动、位移信号,能连续准确地采集到转子振动状态的多种参数。
如轴的径向振动、振幅以及轴向位置。
在所有与机械状态有关的故障征兆中,机械振动测量是最具权威性的,这是因为它同时含有幅值、相位和频率的信息。
机械振动测量占有优势的另一个原因是:它能反应出机械所有的损坏,并易于测量。
从转子动力学、轴承学的理论上分析,大型旋转机械的运动状态,主要取决于其核心—转轴,而电涡流传感器,能直接非接触测量转轴的状态,对诸如转子的不平衡、不对中、轴承磨损、轴裂纹及发生摩擦等机械问题的早期判定,可提供关键的信息。
电涡流传感器以其长期工作可靠性好、测量范围宽、灵敏度高、分辨率高、响应速度快、抗干扰力强、不受油污等介质的影响、结构简单等优点,在大型旋转机械状态的在线监测与故障诊断中得到广泛应用。
第二节探头、(延伸电缆)、前置器以及被测体构成基本工作系统。
前置器中高频振荡电流通过延伸电缆流入探头线圈,在探头头部的线圈中产生交变的磁场。
如果在这一交变磁场的有效范围内没有金属材料靠近,则这一磁场能量会全部损失;当有被测金属体靠近这一磁场,则在此金属表面产生感应电流,电磁学上称之为电涡流。
与此同时该电涡流场也产生一个方向与头部线圈方向相反的交变磁场,由于其反作用,使头部线圈高频电流的幅度和相位得到改变(线圈的有效阻抗),这一变化与金属体磁导率、电导率、线圈的几何形状、几何尺寸、电流频率以及头部线圈到金属导体表面的距离等参数有关。
通常假定金属导体材质均匀且性能是线性和各项同性,则线圈和金属导体系统的物理性质可由金属导体的电导率б、磁导率ξ、尺寸因子τ、头部体线圈与金属导体表面的距离D、电流强度I和频率ω参数来描述。
电涡流传感器位移实验报告
电涡流传感器位移实验报告背景电涡流传感器是一种非接触式位移传感器,广泛应用于工业领域中的位移测量。
它基于涡流效应,通过感应涡流的变化来测量目标物体的位移。
在实验中,我们使用了一种常见的电涡流传感器,将其应用于位移测量,并对其性能进行了评估和分析。
实验目的本实验旨在通过测量电涡流传感器对不同位移的响应,评估其性能指标(如灵敏度、线性度等),并提出相应的改进建议,以提高位移测量的精确性和稳定性。
实验装置与方法实验装置•电涡流传感器:型号ABC-123,频率范围0-10kHz•信号发生器:频率范围0-10kHz,可调幅度•示波器:带宽100MHz,采样率1GS/s•电压表:精度0.1mV实验步骤1.准备实验装置,保证电涡流传感器与信号发生器、示波器的连接正确。
2.设置信号发生器的频率为2kHz,并将幅度调至适当水平。
3.将电涡流传感器固定在实验台上,使其与目标物体相对静止并平行。
4.使用示波器测量电涡流传感器输出的电压信号,并记录数据。
5.调整信号发生器的频率和幅度,重复步骤4,以获得不同位移下的电压信号。
数据分析与结果实验数据我们通过实验获得了电涡流传感器在不同位移下的电压信号数据,如下所示:位移 (mm) 电压 (mV)0 1.21 1.52 1.83 2.14 2.45 2.7曲线拟合与性能评估我们将实验数据进行曲线拟合,以评估电涡流传感器的性能指标。
首先,我们使用最小二乘法对数据进行线性拟合。
得到的拟合直线的方程为:V = 0.3d + 1.2其中V表示电压(mV),d表示位移(mm)。
通过拟合直线,我们可以计算出电涡流传感器的灵敏度为0.3 mV/mm,表示单位位移引起的电压变化量。
其次,我们计算了电涡流传感器的线性度。
线性度是衡量传感器输出与输入之间线性关系程度的指标,通常以百分比表示。
通过计算每个数据点与拟合直线之间的残差,并将其转化为线性度,我们得到了电涡流传感器的线性度为95%。
结果分析与建议通过对实验数据的分析和性能评估,我们得到了以下结论:1.电涡流传感器表现出良好的线性关系,其灵敏度为0.3 mV/mm。
电涡流式传感器电涡流式传感器
电涡流式传感器电涡流式传感器
电涡流式传感器
电涡流式传感器
eddycurrenttypetransducer
利用电涡流效应将位移等非电被测参量转换为线圈的电感或阻抗变化的变磁阻式传感器。
电涡流效应是指金属导体置于交变磁场中会产生电涡流,且该电涡流所产生磁场的方向与原磁场方向相反的一种物理现象。
电涡流传感器的敏感元件是线圈,当给线圈通以交变电流并使它接近金属导体时,线圈产生的磁场就会被导体电涡流产生的磁场部分抵消,使线圈的电感量、阻抗和品质因数发生变化。
这种变化与导体的几何尺寸、导电率、导磁率有关,也与线圈的几何参量、电流的频率和线圈到被测导体间的距离有关。
如果使上述参量中的某一个变动,其余皆不变,就可制成各种用途的传感器,能对表面为金属导体的物体进行多种物理量的非接触测量。
这种传感器的优点是结构简单、频率响应宽、灵敏度高、测量线性范围大、抗干扰能力强、体积小等。
它是一种很有发展前途的传感器。
电涡流式传感器按用途可分为测量位移、接近度和厚度的传感器;按结构可分为变间隙型、变面积型、螺管型和低频透射型4类。
变间隙型 这种传感器结构很简单,主要元件是一个固定于传感器端部的线圈。
当被测导体与线圈之间的间隙发生变化时,就引起线圈电感、阻。
电涡流位移传感器介绍
④ 如果验收不合格,请尽快与本公司联系。
2、 贮存 如果长期不使用,传感器系统应存放在温度介于-30℃~70℃、相
对湿度不大于 90%的整洁室内,且室内空气中不得含有腐蚀性气体。 存放期达一年以上的,使用前应重新校准。 3、试件材料
ZA21 系列前置器只有一种外形结构。 外型尺寸: 78×70×30(mm) 安装尺寸: DIN35 导轨安装 供电电源 UT: 1、 -20V DC~-26V DC,输出电压极限:-0.7V~(UT+1)V,线性
量程内输出电压范围:-2V~-18V。 2、 亦可使用供电电源+20V~+26V 输出电压极限: 0.7V~(UT-1)
探头壳体用于连接和固定探头头部,并作为探头安装时的装夹结
构。壳体一般采用不锈钢制成(对于高温、高压、强酸、强碱等特殊
环境的应用、本公司可以为用户提供一体化全陶瓷探头头部和壳体的
探头),一般上面刻有标准螺纹,并备有锁紧螺母。为了能适应不同的
应用和安装场合,探头壳体具有不同的形式和不同的螺纹及尺寸规格
(见附录 A)。
一套完整的传感器系统主要包括探头、延伸电缆(用户可以根据 需要选择)、前置器和附件。系统组成见图 1-1。
图 1-1 一套完整的传感器系统的组成
★ 与同类产品的兼容性 ZA21 系列电涡流位移传感器的各项性能指标相当或接近美国本
特利(BN)公司的 3300 系列产品水平,优于国内任何一家公司的同 类产品。
① 将系统各部分从包装箱取出。检查是否存在由于运输不当造 成的损坏。如果有,应立即与承运单位交涉提出索赔,并将情况反映 给本公司。
电涡流位移传感器,标准型

HZ891系列电涡流位移传感器简介航振HZ891系列电涡流位移传感器作为我公司前期的主导产品,十多年来已广泛应用于电力、石化、冶金等各个行业,其良好的稳定性及科学的工艺结构,使其在恶劣的工作环境下仍能保持优良的技术特性.它不仅与其升级产品HZ891XL 系列完全兼容,也可直接替换BN 公司3300、3300XL 、7200系列产品。
系统组成系统主要包括探头、前置器、延伸电缆(用户可以根据需要选择)和附件。
探头选型CWY -D O -891T □□-□-□-□□-□□E 电缆长度 壳体总长 无螺纹长 探头代号 电涡流位移传感器 B 系列号 探头直径 F 铠装代号 螺纹规格 D A 安装方式 C*具体参数选项参见HZ891XL 系列探头选型资料选型示例CWY-DO-891T08-M10×1-B-01-05-50表示:HZ891系列电涡流传感器,探头直径φ8、壳体螺纹M10×1、标准安装方式、无螺纹长10mm 壳体长度50mm 、电缆长度5m 、不带铠装。
CWY -D O -891Q □□-□□前置器代号电涡流 位移传感器 B 系列号探头直径 输出方式 A 电缆长度C前置器选型*具体参数选项参见891XL 系列前置器选型资料图示 HZ898系列前置器安装尺寸图选型示例CWY-DO-891Q08-50V表示:HZ891系列电涡流传感器,配φ8、5m 长电缆探头,负电压输出 (-18Vdc ~ -26Vdc 供电)。
延伸电缆选型CWY -D O -891Y -□□延伸电缆代号 电涡流 位移传感器 系列号 A 电缆长度铠装代号*具体参数选项参见HZ891XL 系列延伸电缆选型资料选型示例CWY-DO-891Y-40K表示:HZ891系列电涡流传感器,电缆长度4m 、带铠装。
电涡流位移传感器
电涡流位移传感器摘要:随着现代测量、控制盒自动化技术的发展,传感器技术越来越受到人们的重视。
特别是近年来,由于科学技术的发展及生态平衡的需要,传感器在各个领域的作用也日益显著。
传感器技术的应用在许多个发达国家中,已经得到普遍重视。
电涡流传感器已成为目前电测技术中非常重要的检测手段,广泛的应用于工程测量和科学实验中。
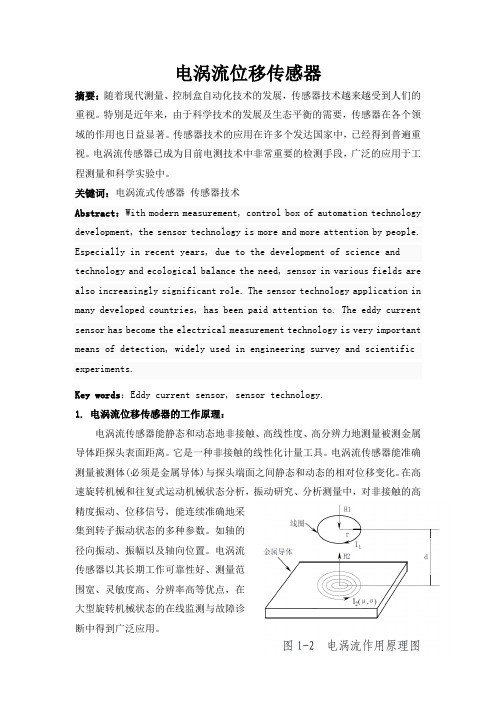
关键词:电涡流式传感器传感器技术Abstract:With modern measurement, control box of automation technology development, the sensor technology is more and more attention by people. Especially in recent years, due to the development of science and technology and ecological balance the need, sensor in various fields are also increasingly significant role. The sensor technology application in many developed countries, has been paid attention to. The eddy current sensor has become the electrical measurement technology is very important means of detection, widely used in engineering survey and scientific experiments.Key words:Eddy current sensor, sensor technology.1.电涡流位移传感器的工作原理:电涡流传感器能静态和动态地非接触、高线性度、高分辨力地测量被测金属导体距探头表面距离。
电涡流位移传感器的使用说明
电涡流位移传感器的使用说明一、原理非接触式电涡流位移传感器'>传感器,是基于高频磁场在金属表面的涡流效应而成,是对金属物体的位移、振动、转速等机械量进行检测和控制的理想传感器。
它具有非接触测量、线性范围宽、灵敏度高、抗干扰能力强、无介质影响、稳定可靠、易于处理等明显优点,广泛用于冶金、化工、航天等行业中,也可用于科研和学校实验中的位移、振动、转速、长度、厚度、表面不平度等机械量的检测。
目前我公司生产的电涡流式传感器有两大类:位移、和转速传感器。
二、 MLW3300型位移、振动传感器1、量程: 250 .m----- 20mm2、线性误差:0.5% ~3.5%3、分辨率:0.05%(静态)0.1%(动态)。
4、频率响应:0 ~ 10KHz(0 ~ 2KHz, 0.5%, 2 ~ 10KHz 1%)5、工作温度:―20℃~100℃ (常温)―40℃~160℃ (高温)6、温度漂移:0.08%/℃(F.S)7、探头外径:Ф6~Ф65(mm)8、安装部分尺寸:a: M10 1 50. (量程 2mm)b: ф13 50. (量程 15mm)c: ф18 50. (量程 15mm)(注:尾架可根据用户要求定制)三、HR2000型前置变换器前置变换器的型号分为:1、信号输出:a: 非标准电压输出,(BZF Ⅰ)b: 0~~ 2V, 0~~ 5V,0~10V.(BZF―Ⅱ)C: 4~20mA. (BZF―Ⅲ)2、供电电源:a: 15~24V (BZF―Ⅰ,BZF―Ⅱ)b: ―20~30V (BZF―Ⅲ)(用户可选配本公司ZY-A型专用电源)3、接线:四芯航空插头①负电源, ②正电源,③信号输出,④公共地(4―20mA输出②脚为空脚)4、工作温度:0℃~65℃5、有容错装置,不会因电源接错而烧毁。
四、位移传感器的连接和标定1、传感器与前置变换器的连接①、通过高频连接,标准长度为3米。
②、最大可加长至9米,需订货时说明。
电涡流位移传感器实验报告

实验目的:通过对电涡流位移传感器的实验,了解其工作原理、特性以及在位移测量中的应用。
### 1. 实验背景
电涡流位移传感器是一种非接触、高精度的位移传感器,主要应用于测量金属导体的微小位移。
本实验旨在深入了解电涡流位移传感器的性能参数和使用方法。
### 2. 实验设备
- 电涡流位移传感器
- 信号调理电路
- 示波器
- 位移标准样品
### 3. 实验步骤
1. 连接电路:将电涡流位移传感器与信号调理电路连接,确保连接正确无误。
2. 设置示波器:对示波器进行适当设置,以便观察电涡流传感器输出信号的波形。
3. 校准:使用位移标准样品对电涡流传感器进行校准,调整信号调理电路,确保输出信号与位移值对应准确。
4. 进行位移测量:将电涡流传感器放置在待测物体上,通过示波器观察和记录输出信号的变化,进行位移测量。
5. 性能评估:测量不同位移值下的输出信号,并评估电涡流位移传感器的灵敏度、稳定性和线性度等性能指标。
### 4. 实验数据处理
对实验得到的数据进行整理和分析,绘制位移与输出信号的关系曲线,计算性能指标。
### 5. 实验结论
根据实验数据和分析结果,得出电涡流位移传感器在不同条件下的性能特点,评估其在位移测量中的适用性。
### 6. 实验总结
通过本次实验,深入了解了电涡流位移传感器的工作原理和性能,掌握了其在位移测量中的应用方法,为今后的传感器应用和实验研究提供了基础。
### 7. 实验改进和展望
根据实验中的经验,提出可能的实验改进方案,并展望电涡流位移传感器在未来的发展方向和应用领域。
电涡流位移传感器使用办法

电涡流位移传感器
说明:
本元件使用方法有两种
1 稳压电源给前置器提供-24V稳定电压,再用一头3根单头Q9接头的导线连接短接头,最后接东华。
如图1
2 将前置器接用两头都是3根单导线直接连接桥盒,再连接东华。
如图2
3 桥盒采用半桥的连接方式,红_Vg+,黄_Vi+,红_Vg-.
桥盒输出的是对称电压,及+/-12V;与对称电压相反的是偏值电压,-24V。
桥盒类型:半桥(U型铜片插入)
测量类型:内输入采
灵敏度:mV/EU(1 mV每工程单位)
输入方式:DIF_DC
图1
电源输出为+24V,为了提供-24V,特将前置器与电源的正负反
接
图2
Com位为公共电位,既作为给前置器供电的导线,又作为信号
返回传输线。
注意:所有设置在重新开机后都要重新设置,否则会出现软件错误。
WYK-303B2 直流稳压电源
问题1
只出现半波
解决:
问题2
无信号
桥盒电压不足
问题3
桥盒电压不足。
电涡流传感器应用
2019/9/18
1
位移测量仪
位移测量包含:
偏心、间隙、位 置、倾斜、弯曲、变 形、移动、圆度、冲 击、偏心率、冲程、 宽度等等。来自不同 应用领域的许多量都 可归结为位移或间隙 变化。
数显位移测量仪及探头
2019/9/18
2
4~20mA电涡流位移传感器外形
(参考德国图尔克公司资料)
2019/9/18
电涡流传感器的应用
一、位移测量
电涡流位移传感器是一种输出为模拟电压的电子 器件。接通电源后,在电涡流探头的有效面(感应工 作面)将产生一个交变磁场。 当金属物体接近此感 应面时,金属表面将吸取电涡流探头中的高频振荡能 量,使振荡器的输出幅度线性地衰减,根据衰减量的 变化,可地计算出与被检物体的距离、振动等参数。 这种位移传感器属于非接触测量,工作时不受灰尘等 非金属因素的影响,寿命较长,可在各种恶劣条件下 使用。
测量悬臂梁的 振幅及频率
2019/9/18
汽轮机叶片测试
22
三、转速测量
若转轴上开z 个槽(或齿),频率计的读数
为f(单位为Hz),则转轴的转速n(单位为
r/min)的计算公式为 n 60 f z
2019/9/18
23
各种测量转速的传感器及其与齿轮的相对位置
2019/9/18
24
齿轮转速测量
3
齐平式电涡流位移传感器外形(参考德国图尔克公司资料)
齐平式传感器安装时可以不高出安装面,不易被损害。
2019/9/18
4
V系列电涡流位移传感器外形(参考浙江洞头开关厂资料)
2019/9/18
齐平式
5
V系列电涡流位移传感器性能一览表
(摘自洞头开关厂资料)
电涡流位移传感器在设备监测诊断中的应用
电涡流位移传感器在设备监测诊断中的应用作者:王海洋来源:《硅谷》2011年第04期设备监测诊断的概念:通过实时监测设备的横向位移、纵向位移、轴向位移,分析对比位移情况和振动幅度来测量压缩机的振动情况,测出振动曲线,分析后得出设备位移量。
这种方式称之为设备监测诊断。
目前我厂的设备主要有往复式压缩机和离心式压缩机,我们的工作主要是对这两种压缩机的位移情况进行测量,确保位移在允许偏差之内。
我们的实时监测主要是依靠电涡流传感器来实现的。
传感器的种类很多,为什么我们要选用电涡流传感器呢?这就要从它的特性来说起。
电涡流传感器能静态和动态地非接触、高线性度、高分辨力地测量被测体(必须是金属导体)与探头端面之间静态和动态的相对位移变化。
电涡流传感器以其长期工作可靠性好、测量范围宽、灵敏度高、分辨率高、响应速度快、抗干扰力强、不受油污等介质的影响、结构简单等优点,在大型旋转机械状态的在线监测与故障诊断中得到广泛应用。
1、电涡流传感器的基本原理根据法拉第电磁感应原理,块状金属导体置于变化的磁场中或在磁场中作切割磁力线运动时,导体内将产生呈涡旋状的感应电流,此电流叫电涡流,以上现象称为电涡流效应。
而根据电涡流效应制成的传感器称为电涡流式传感器。
前置器中高频振荡电流通过延伸电缆流入探头线圈,在探头头部的线圈中产生交变的磁场。
当被测金属体靠近这一磁场,则在此金属表面产生感应电流,与此同时该电涡流场也产生一个方向与头部线圈方向相反的交变磁场,由于其反作用,使头部线圈高频电流的幅度和相位得到改变(线圈的有效阻抗),通常假定金属导体材质均匀且性能是线性和各项同性,则线圈和金属导体系统的物理性质可由金属导体的电导率6、磁导率ξ、尺寸因子τ、头部体线圈与金属导体表面的距离D、电流强度I和频率ω参数来描述。
电涡流传感器就是根据这一原理实现对金属物体的位移、振动等参数的测量。
2、电涡流传感器的在我厂设备监测诊断中的应用2.1横向位移的测定横向位移是设备监测诊断中需要测量的一个重要数据,测出横向位移后,绘制出x轴的位移变化图,绘出变化曲线,与之前的位置进行分析比对,找出位移变化。
电涡流位移传感器

Categories:产品编号: 301产品名称: 电涡流传感器系统技术指标Clicks: 537 times商品描述:电涡流位移传感器系统技术指标■包括标准的电涡流位移传感器;■测试条件(有特别说明除外)前置器负载10KΩ,被测试件为40CrMo ,温度20℃■供电电源(供电电源输出电流不小于50mA)。
前置器输出方式不限幅负电压输出:-22~-26Vdc;■线性量程、线性范围、线性中点、非线性误差、最小被测面■探头直径(mm)线性量程(mm)线性范围(mm)灵敏度(v/mm)非线性误差最小被测面(mm)Ф520.25~2.2581%Ф15Ф820.25~2.2581%Ф20Ф114 1.0~5.04 1.2%Ф33Ф2512.5 1.25~13.751.282%Ф55Ф50250.25~2.250.642%Ф120注:非线性误差指实际输出值与理论值(按指标特性方程计算)最大相对误差。
■灵敏度(线性范围内输出差值比线性范围)探头直径(线性量程)灵敏度前置器输出φ8 mm(2mm)φ11 mm(4mm)Ф25mm(12.5mm)代号输出单位01-1.5~-21VV/mm84 1.28024~20mAmA/mm84 1.28■频率响应:0~10kHz(0到600,000cpm), –5% @10kHz电涡流探头▲耐高温、低膨胀的PPS注塑成型头部体,彻底的密封设计▲进口军标连接电缆和不锈钢接头▲优化的线圈参数温度稳定性设计,极低的温度漂移▲机械连接的高强度和优良的抗拉、扭性能探头内部线圈直径决定探头的线性量程,由于我们独创的线性拓展技术,我们只推出Φ8 、Φ11、Φ25三种探头就可以替代原有十余种直径的电涡流探头,满足各种使用需要。
电涡流传感器概述 电涡流测量原理
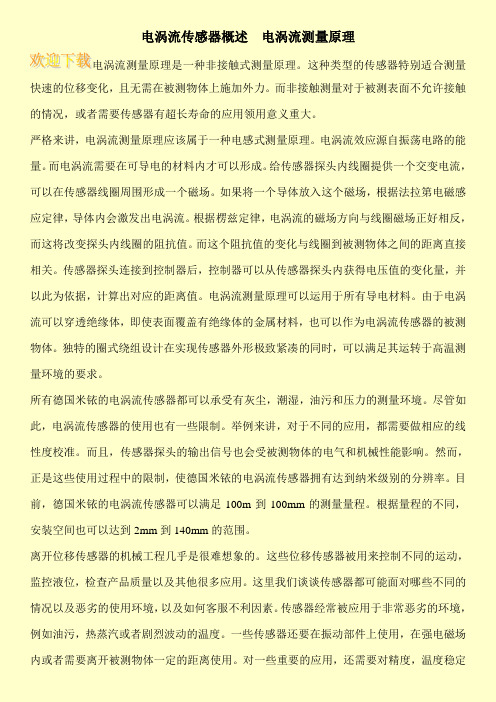
电涡流传感器概述电涡流测量原理电涡流测量原理是一种非接触式测量原理。
这种类型的传感器特别适合测量快速的位移变化,且无需在被测物体上施加外力。
而非接触测量对于被测表面不允许接触的情况,或者需要传感器有超长寿命的应用领用意义重大。
严格来讲,电涡流测量原理应该属于一种电感式测量原理。
电涡流效应源自振荡电路的能量。
而电涡流需要在可导电的材料内才可以形成。
给传感器探头内线圈提供一个交变电流,可以在传感器线圈周围形成一个磁场。
如果将一个导体放入这个磁场,根据法拉第电磁感应定律,导体内会激发出电涡流。
根据楞兹定律,电涡流的磁场方向与线圈磁场正好相反,而这将改变探头内线圈的阻抗值。
而这个阻抗值的变化与线圈到被测物体之间的距离直接相关。
传感器探头连接到控制器后,控制器可以从传感器探头内获得电压值的变化量,并以此为依据,计算出对应的距离值。
电涡流测量原理可以运用于所有导电材料。
由于电涡流可以穿透绝缘体,即使表面覆盖有绝缘体的金属材料,也可以作为电涡流传感器的被测物体。
独特的圈式绕组设计在实现传感器外形极致紧凑的同时,可以满足其运转于高温测量环境的要求。
所有德国米铱的电涡流传感器都可以承受有灰尘,潮湿,油污和压力的测量环境。
尽管如此,电涡流传感器的使用也有一些限制。
举例来讲,对于不同的应用,都需要做相应的线性度校准。
而且,传感器探头的输出信号也会受被测物体的电气和机械性能影响。
然而,正是这些使用过程中的限制,使德国米铱的电涡流传感器拥有达到纳米级别的分辨率。
目前,德国米铱的电涡流传感器可以满足100m到100mm的测量量程。
根据量程的不同,安装空间也可以达到2mm到140mm的范围。
离开位移传感器的机械工程几乎是很难想象的。
这些位移传感器被用来控制不同的运动,监控液位,检查产品质量以及其他很多应用。
这里我们谈谈传感器都可能面对哪些不同的情况以及恶劣的使用环境,以及如何客服不利因素。
传感器经常被应用于非常恶劣的环境,例如油污,热蒸汽或者剧烈波动的温度。
一文读懂电涡流位移传感器的工作机理
一文读懂电涡流位移传感器的工作机理电涡流位移传感器利用感应涡流原理,可以在一定范围内有效地测量位移或距离的变化。
当金属被测物体靠近探头时,根据位移或距离不同,电涡流位移传感器输出不同的电压,从而对照算出位移的变化量。
电涡流位移传感器主要由探头、前置器、连接电缆三部分构成。
探头内置线圈,使用与接近开关类似。
前置器通常使用盒式密封设计,前置器电路主要包括振荡电路、电压检测电路、放大器三部分,电压型电涡流位移传感器的前置器一般引出5个接线端子,即电源正+12VDC(或+24 V DC)、电源负、输出正OUT+、输出负OUT-、接地GND。
连接电缆两端分别接探头和前置器。
电涡流位移传感器的工作机理如下:前置器内部的振荡电路产生高频振荡电流,该高频振荡电流经连接电缆进入探头内置线圈,探头由此产生高频变化的磁场。
当金属被测物体靠近探头的较近位置时,金属被测物体产生涡流。
涡流再生涡流磁场,磁力线方向与探头线圈相反,由此改变了探头的阻抗,引起振荡电路的振荡电压幅值发生变化。
变化后的振荡电压经电压检测电路并滤波放大后,形成输出电压。
由此可见,位移变化引起输出电压变化就是电涡流位移传感器的工作机理。
电涡流效应和多项参数有关,如金属被测物体的电导率、磁导率、探头线圈直径、探头与金属被测物体的距离、振荡频率等。
在电涡流位移传感器中,探头直径对量程、分辨率有着重要影响。
表1以嘉可
JK型电涡流位移传感器的参数为例,列举了不同探头直径的量程、分辨率、线性误差。
由表1数据可见,探头直径越大,量程越大,但分辨率越低,线性误差越大。
电涡流式传感器的结构和工作原理
电涡流式传感器的结构和工作原理
时间:2010-02-09 20:52:37 来源:电子发烧友作者:
当导体置于交变磁场或在磁场中运动时,导体上引起感生电流ie,此电流在导体内闭合,称为涡流。
涡流大小与导体电阻率ρ、磁导率μ以及产生交变磁场的线圈与被测体之间距离x,线圈激励电流的频率f有关。
显然磁场变化频率愈高,涡流的集肤效应愈显著。
即
涡流穿透深度愈小,其穿透深度h可表示
ρ—导体电阻率(Ω·cm);
μr—导体相对磁导率;
f—交变磁场频率(Hz)。
可见,涡流穿透深度h和激励电流频率f有关,所以涡流传感器根据激励频率:高频反射式或低频透射式两类。
目前高频反射式电涡流传感器应用广泛。
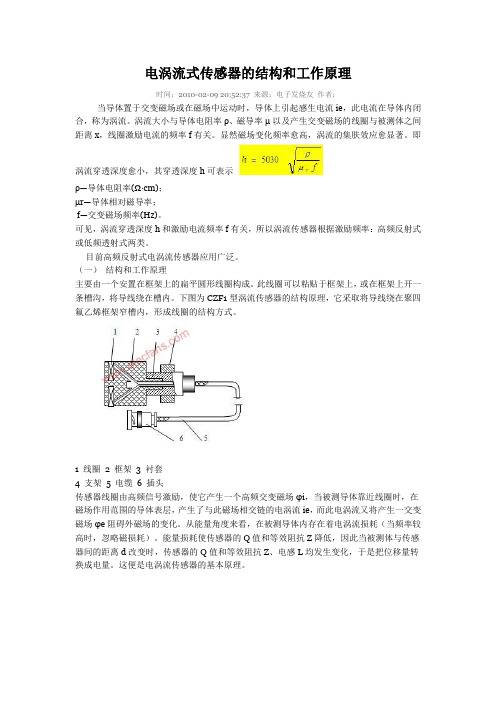
(一)结构和工作原理
主要由一个安置在框架上的扁平圆形线圈构成。
此线圈可以粘贴于框架上,或在框架上开一条槽沟,将导线绕在槽内。
下图为CZF1型涡流传感器的结构原理,它采取将导线绕在聚四氟乙烯框架窄槽内,形成线圈的结构方式。
1 线圈
2 框架
3 衬套
4 支架
5 电缆
6 插头
传感器线圈由高频信号激励,使它产生一个高频交变磁场φi,当被测导体靠近线圈时,在磁场作用范围的导体表层,产生了与此磁场相交链的电涡流ie,而此电涡流又将产生一交变磁场φe阻碍外磁场的变化。
从能量角度来看,在被测导体内存在着电涡流损耗(当频率较高时,忽略磁损耗)。
能量损耗使传感器的Q值和等效阻抗Z降低,因此当被测体与传感器间的距离d改变时,传感器的Q值和等效阻抗Z、电感L均发生变化,于是把位移量转换成电量。
这便是电涡流传感器的基本原理。
电涡流传感器原理图。
电涡流传感器

电涡流传感器_TMS-HZD-O
一、产品简介
厦门汤姆斯自动化科技有限公司中TMS-HDO电涡流传感器是基于涡流效应的原理研制而成的非接触式位移传感器,它由前置放大器、电涡流型探头及加长电缆组成,用来测量旋转机械轴的各种运行状态参数,具有长期工作可靠性好,灵敏度高、抗干扰能力强、响应速度快、耐高温,可在蒸汽、油、水等恶劣环境下工作,不受蒸汽、油污等介质的影响,广泛用于电力、石油化工、冶金、汽车、航空航天等行业,对各种机械的轴位移、振动、偏心、差胀、油膜厚度等进行在线监测。
TMS-HDO可用来精密诊断系统的运行状态,为系统提供全息动态特性,有效地对设备进行保护,为企业预先做好维护的准备,减少事故隐患的发生,提高工作效率!
二、主要技术指标
销售热线:0086-0592-*******
图文传真:0086-0592-*******
电子邮箱:tomsauto@
官方网站:
地址:福建省厦门市湖里区
兴隆路25号信源大厦。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MICRO-EPSILON MESSTECHNIKGmbH & Co. KG Königbacher Strasse 15D-94496 Ortenburg Tel. +49/85 42/1 68-0Fax +49/85 42/1 68-90e-mail: info@micro-epsilon.dewww.micro-epsilon.deDIN EN ISO 9001: 2008Berührungsloses Kompakt-Wegmesssystem auf WirbelstrombasisNon Contact Compact Displacement Measuring System on Eddy Current PrincipleZertifiziert nachCertified acc. toX975x145-A051100HDR*X975X145-A05*Inhalt1.Sicherheit (5)1.1Verwendete Zeichen...........................................................................................................51.2Warnhinweise .....................................................................................................................51.3Hinweise zur CE-Kennzeichnung ........................................................................................61.4Bestimmungsgemäße Verwendung....................................................................................71.5Bestimmungsgemäßes Umfeld (7)2.Systembeschreibung (8)2.1Anwendungsgebiet ............................................................................................................82.2Messprinzip........................................................................................................................82.3Aufbau des kompletten Messsystems................................................................................92.4T echnische Daten (10)3.Lieferung......................................................................................................133.1Lieferumfang, Auspacken.................................................................................................133.2Lagerung..........................................................................................................................134.Inbetriebnehmen (14)4.1Systemkomponenten.......................................................................................................144.2Synchronisieren bei Mehrkanalsystemen .........................................................................174.3Systemabgleich ...............................................................................................................184.4Sensormontage................................................................................................................184.5Sensorkabel verlegen (21)5.Bedienen (22)5.1Bedienelemente ...............................................................................................................245.2Kalibrieren und Linearisieren ............................................................................................255.2.1Controller DT3010............................................................................................................255.2.2Verschieben der Ausgangskennlinie (28)6.Fehler beheben (29)7.Zubehör und Ersatzteile (30)8.Haftung für Sachmängel (31)9.Außerbetriebnahme, Entsorgung (31)10.Anhang (32)10.1Maßzeichnung Sensoren (32)10.2Maßzeichnung Sensorkabel (33)10.3Maßzeichnung Controller (33)1.SicherheitDie Systemhandhabung setzt die Kenntnis der Betriebsanleitung voraus.1.1Verwendete ZeichenIn dieser Betriebsanleitung werden folgende Bezeichnungen verwendet:Zeigt eine gefährliche Situation an, die zu geringfügigen oder mittelschweren Verletzungen führt, falls diese nicht vermieden wird.Zeigt eine Situation an, die zu Sachschäden führen kann, falls diese nicht vermieden wird.Zeigt eine ausführende Tätigkeit an.Zeigt einen Anwendertipp an.1.2WarnhinweiseSchließen Sie die Spannungsversorgung und das Anzeige-/Ausgabegerät nach den Sicherheitsvorschriften für elektrische Betriebsmittel an.> Verletzungsgefahr> Beschädigung oder Zerstörung des Controllers und/oder Sensors Vermeiden Sie Stöße und Schläge auf den Sensor und den Controller.> Beschädigung oder Zerstörung des Controllers und/oder Sensors Schützen Sie das Sensorkabel vor Beschädigung.> Beschädigung oder Zerstörung des Controllers und/oder Sensorsi1.3Hinweise zur CE-KennzeichnungFür das Messsystem eddyNCDT3010 gilt:EMV-Richtlinie 2004/108/EGProdukte, die das CE-Kennzeichen tragen, erfüllen die Anforderungen der EMV-Richtlinie 2004/108/EG …Elektromagnetische Verträglichkeit“ und die dort aufgeführten harmonisierten europäischen Normen (EN). Die EU-Konformitätserklärung wird gemäß der EU-Richtlinie, Artikel 10, für die zuständige Behörde zur Verfügung gehalten beiMICRO-EPSILON MESSTECHNIKGmbH & Co.KGKönigbacher Straße 15D-94496 OrtenburgDer Controller ist ausgelegt für den Einsatz im Industriebereich und erfüllt die Anforderungen gemäß den Normen:- DIN EN 61326-1: 2006-10- DIN EN 61326-2-3: 2007-05Das Messsystem erfüllt die Anforderungen, wenn bei Installation und Betrieb die in der Betriebsanleitung beschriebenen Richtlinien eingehalten werden.Sicherheit1.4Bestimmungsgemäße Verwendung-Das eddyNCDT3010 ist für den Einsatz im Industriebereich konzipiert.-Es wird eingesetzt zur Maschinenüberwachung und zu Mess- und Prüfaufgaben in der Prozess-Qualitätssicherung.-Setzen Sie das eddyNCDT3010 ist so ein, dass bei Fehlfunktionen oder Totalausfall des Systems keine Personen gefährdet oder Maschinen beschädigt werden.-Treffen Sie bei sicherheitsbezogener Anwendung zusätzlich Vorkehrungen für die Sicherheit und zur Schadensverhütung.1.5Bestimmungsgemäßes Umfeld-SchutzartSensor:IP65Controller:IP54-Betriebstemperatur:Sensor und Kabel:-50 bis +150 °C Controller:+10 bis +50 °C-Luftfeuchtigkeit: 5 - 95 % (nicht kondensierend)-Umgebungsdruck:Atmosphärendruck -Versorgung:24 VDC / 205 mA -Lagertemperatur:Sensor und Kabel:-50 bis +150 °C Controller:-25 bis +75 °C2.Systembeschreibung2.1AnwendungsgebietDie berührungslos arbeitenden Kompaktwegmesssysteme eddyNCDT3010 sind konzipiert für den industriel-len Einsatz in Produktionsanlagen, zur Maschinenüberwachung und zum Messen und Prüfen in der In-Prozess-Qualitätssicherung.2.2MessprinzipDas Wegmesssystem eddyNCDT3010 (Non-Contacting Displacement Transducers) arbeitet berührungslos auf Wirbelstrombasis. Es wird für Messungen an Objekten aus elektrisch leitenden Werkstoffen verwendet, die ferromagnetische und nichtferromagnetische Eigenschaften haben können.Hochfrequenter Wechselstrom durchfließt eine in ein Sensorgehäuse eingegossene Spule. Das elektromag-netische Spulenfeld induziert im leitfähigen Messobjekt Wirbelströme, dadurch ändert sich der Wechselstrom-widerstand der Spule. Diese Impedanzänderung liefert ein elektrisches Signal, proportional zum Abstand des Messobjekts vom Sensor.Ein patentiertes elektronisches Kompensationsverfahren reduziert temperaturabhängige Messfehler auf ein Minimum.Abb. 2.1: eddyNCDT3010 mit Controller und Sensoren2.3Aufbau des kompletten MesssystemsDas berührungslos arbeitende Einkanal-Wegmesssystem eddyNCDT3010 (siehe Abb. 2.1) besteht aus:-Sensor-Sensorkabel -Anschlusskabel -Controllereingebaut in ein kompaktes Aluminium-Gehäuse.Serien-Nummer.Sensoranschluss SynchronisationEingangSynchronisationAusgangSensoreniAufeinander abgestimmte KomponentenT echnische Daten2.4T echnische Datend.M = des MessbereichsMBM = Messbereichsmitte1) Bezogen auf MessbereichsmitteT echnische DatenTab. 2.1 Fortsetzung technische DatenT echnische DatenMesssysteme der Serie eddyNCDT3010 messen gegen Messobjekte aus elektrisch-leitenden Werkstoffen.Entsprechend der Abstimmung des Messsystems unterscheidet man-nicht-ferromagnetische Werkstoffe und-ferromagnetische WerkstoffeTab. 2.2: SensorabstimmungNotwendiger Messobjekt-Durchmesser:bei ungeschirmten Sensoren:3-facher Sensordurchmesser bei geschirmten Sensoren:1,5-facher Sensordurchmessergn u m m i t s b A e p p u r g t k e j b o s s e M ff o t s k r e W -z n e r e f e R A th c i n h c s i t e n g a m o r r e f m u i n i m u l A Mhc s i t e n g a m o r r e f 7300.1N I D l h a t S Messungen gegen kleinere Messobjekte sind möglich, wenn:-ein Linearitätsabgleich in dieser Anordnung durchgeführt wurde und -das Messobjekt exakt in der Messachse positioniert wird.Messung gegenkleineMessobjektei3.Lieferung3.1Lieferumfang, AuspackenNach dem Auspacken sofort auf Vollständigkeit und Transportschäden prüfen. Zum Lieferumfang gehört:1Sensor 1Betriebsanleitung 1Sensorkabel 1Prüfprotokoll 18 pol. DIN-Buchse (Analogausgang/ Versorgung)1ControllerBei Schäden oder Unvollständigkeit wenden sie sich bitte sofort an MICRO-EPSILON oder Ihren Lieferanten.3.2LagerungLagertemperaturSensor und Kabel:-50 ... 150 °C Controller:-25 ... 75 °CLuftfeuchtigkeit:5 - 95 % (nicht kondensierend)LieferungInbetriebnehmen4.Inbetriebnehmen4.1SystemkomponentenSensor:Das Messsystem eddyNCDT wird mit ungeschirmten oder geschirmten Sensoren eingesetzt.Ungeschirmte Sensoren (Abb. 4.1):-Typenbezeichnung: U..-Aufbau: Die Messrichtung mit eingebetteter Spule bestehtaus elektrisch nichtleitenden Werkstoffen.-Achtung: In radialer Richtung können Metallteile in derNähe wie ein Messobjekt wirken und das Messergebnis verfälschen.Geschirmte Sensoren (Abb. 4.2):-Typenbezeichnung: S..-Aufbau: Der Sensor ist bis zur Stirnfläche mit einemStahlgehäuse mit Montagegewinde umgeben.Radial gelegene Metallteile sind abgeschirmt.Abb. 4.2: GeschirmterSensorAbb. 4.1: Ungeschirmter SensorMessrichtungDas Spezialkoaxial-Sensorkabel gibt es in zwei Anschlussausführungen:- Anschluss bereits im Sensor integriert: Typ U05, U1, S1,oder- Anschlusskabel steckbar.Das Standardkabel (C3) hat eine Länge von 3 m.Als Option lieferbar: 6 m Kabel (C6)Kürzen Sie nicht die abgestimmten Kabel, da sich damit die Kapazität und die Abstimmung des Messsystems verändert!Abb. 4.3: SensorkabelausführungenSensor Standard 3 m oder 6 m (Option)ControllerSMC-KabelbuchseLängeSensorkabelSchließen Sie das Kabelende mit der Verdickung am Contoller an.Die Kabel einer Typenbezeichnung werden im Werk auf gleiche Kapazität abgeglichen, dabei können Längenabweichungen von ± 15 % gegenüber der nominellen Länge auftreten.iDer Controller DT3010 (Abb. 4.4) ist in ein Aluminiumgehäuse eingebaut.Oszillator- und Demodulator-Elektronik befinden sich auf einer Platine.-Die Oszillator-Elektronik speist den Sensor mit einer frequenz- und amplitudenstabilen Wech-selspannung.-Die Demodulator-Elektronik demoduliert, linearisiert und verstärkt das abstandsabhängige Messsignal.Der Controller ist bereits werkseitig auf den mitgelieferten Sensor mit Sensorkabel abgestimmt.Abb. 4.4: Der Controller DT3010 mit AnschlusselementenDas Versorgungs- und Ausgangskabel PC3/8 kann als Zubehör geliefert werden.SpannungsversorgungSignalausgangSensoran-schlussSynchronisationEingangSynchronisationAusgangiZubehör PC3/8Inbetriebnehmen4.2Synchronisieren bei MehrkanalsystemenMehrere Messsysteme der Serie eddyNCDT3010 können gleichzeitig als Mehrkanalsystem betrieben wer-den. Synchronisieren der Messsysteme vermeidet ein gegenseitiges Beeinflussen der Sensoren.Stecken Sie das Synchronisationskabel SC30, Zubehör, in die Buchse SYN OUT (Synchronisation Ausgang) am Controller 1.Stecken Sie den zweiten Stecker am Kabel in die Buchse SYN IN (Synchronisation Eingang)am Controller 2.Der Oszillator in Controller 2 schaltet automatisch auf Synchronisationsbetrieb, das heißt in Abhängigkeit vom Oszillator in Controller 1. Nahe zueinander montierte Sensoren beeinflussen sich damit nicht mehr.Synchronisieren Sie gegebenenfalls mehrere Messsysteme mit dem Kabel SC30.Abb. 4.5: Synchronisiertes Mehrkanal-MesssystemController 1 Controller 2 Controller 3SynchronisationEingang Synchronisation AusgangSC304.3SystemabgleichKalibrieren Sie die Messsysteme der Serie eddyNCDT3010 vor der Messung für den jeweiligen An-wendungsfall (siehe Kap. 5.2 Kalibrieren und Linearisieren ).Verwenden Sie nach Möglichkeit-die originale Sensormontage und-das originale MessobjektKönnen Sie das originale Messobjekt nicht verwenden, simulieren Sie die Messumgebung möglichst exakt!4.4SensormontageWirbelstrom-Wegsensoren können in ihrem Messverhalten von einer metallischen Halterung beeinflusst werden.-Bevorzugen Sie die Sensormontage entsprechend dem verwendeten Sensortyp •ungeschirmte Sensoren: Standardmontage •geschirmte Sensoren: Flächenbündige Montage Standardmontage:-die Sensoren ragen über die metallische Halterung hinaus Sensoren mit Gewinde (Abb. 4.6, 4.7):Stecken Sie den Sensor durch die Bohrung in der Sensorhalterung.Schrauben Sie den Sensor fest, dazu die Montagemuttern beidseitig über das aus der Halterung ragende Gewinde drehen.Ziehen Sie die Montagemuttern vorsichtig an, um Beschädigungen, vor allem der kleineren Senso-ren zu vermeiden.iEigenschaft MessobjektBevorzugen Sie die Standardmontage des Sensors, da Sie mit dieser Methode optimale Messergebnisse erzielen.Bei der Kalibrierung dieselbe relative Position des Sensors zur Halterung einhalten, wie bei der Mes-sung.iOptimal:Durchmesser der Sensor-Halteplatte = 2-facher Sensordurchmesser!Abb. 4.7: Geschirmter Sensor mit Gewinde in Standardmontage Abb. 4.8: Sensor ohne Gewinde in StandardmontageHalterung Sensor MontagemutterKalibrierungAbb. 4.6: Ungeschirmter Sensor mit Gewinde in StandardmontageSensoren ohne Gewinde (Abb. 4.8):Befestigen Sie den Sensor mit Hilfe von Gewindestiften an der metallischen Sensor-Halteplatte.Vermeiden Sie eine Beschädigung des Sensors, indem Sie die Befestigungsmuttern der Gewindestifte vorsichtig anziehen. (siehe Abb. 4.8).Flächenbündige Montage Sensoren mit Gewinde:Montieren Sie geschirmte oder ungeschirmte Sensoren bündig in die Sensorhalterung aus Isoliermaterial (Kunststoff, Keramik und so weiter).Montieren Sie geschirmte Sensoren bündig in die metallische Sensorhalterung, siehe Abb. 4.9.Montieren Sie ungeschirmte Sensoren bündig in die metallische Sensorhalterung 1. Achten Sie dabei auf eine Aussparung der Halterung in der Größe des dreifachen Sensordurchmessers.Drehen Sie die Sensoren in allen Montagefällen in die Gewindebohrung und kontern Sie dieSensoren mit der Montagemutter. Ziehen Sie diese vorsichtig an, um Beschädigungen vor allem der kleineren Sensoren zu vermeiden.Kalibrieren Sie das Messsystem in der Messanordnung mit original montiertem Sensor.iMessaufbau für Kalibrierung1) siehe Abb. 4.10.Abb. 4.9: Beispiel für flächenbündige Montage eines geschirmten Sensors in einer metallischen Halterung4.5Sensorkabel verlegenPrüfen Sie die SMC-Schraubverbindungen an Sensor und Controller auf festen Sitz.Verlegen Sie das Sensorkabel so, dass keine scharfkantigen oder schweren Gegenstände auf den Kabelmantel einwirken.Knicken Sie das Kabel nicht ab. Der minimale Biegeradius beträgt 10 mm.InbetriebnehmenAbb. 4.10: Beispiel für flächenbündige Montage eines ungeschirmten Sensors ineiner metallischen HalterungKabel in druckbeaufschlagten Räumen vor Druckbelastung schützen.Sensorkabel nicht beschädigen.Verlust der Funk-tionalität!- Kabelmantel schützen.- Minimalen Biege-radius einhalten.iBedienen5.BedienenMesssystemaufbau prüfen:1)Ist der Sensor auf den Anwendungsfall (Messobjektwerkstoff) abgestimmt?2)Sind Sensor, Sensorkabellänge und Controller aufeinander abgestimmt? (Typ und Seriennummer)3)Ist der Sensor angeschlossen? Sind die Kabelverbindungen fest?Messsystemaufbau anschließen:Stellen Sie die Spannungsversorgung für den Controller her.Verwenden Sie dazu das Anschlusskabel PC3/8 (als Zubehör lieferbar) oder ein vom Anwender gefertigtesKabel.Schließen Sie das Anschlusskabel an die 8-polige Einbaubuchse (Abb. 5.1) am Controller an.Schließen Sie das Anschlusskabel an eine Spannungsversorgung mit + 24 VDC (optional ±15 VDC)an.Schließen Sie die Messsignalanzeigen bzw. Registriergeräte ebenfalls über die 8-polige Einbau-buchse am Controller an.Schalten Sie die Versorgungsspannung am Netzteil ein.Lassen Sie den Messaufbau ca. 15 Minuten warmlaufen.Ansicht: Steckerseite bzw. Lötstiftseite der Kabelbuchse Abb. 5.1: Anschlussbuchsenbelegung und Signalausgang für Standardver-sorgung (+ 24 VDC) und optionale Versorgung (± 15 VDC)i Kabelbuchse+24 VDCVersorgungStromausgang234678150 VDCVersorgungSignal-masseSpannungsaus-gang-15 VDCVersorgung(Option)+15 VDC Versor-gung (Option)0 VDCVersorgung(Option)BedienenFür ein vom Anwender gefertigtes Anschlusskabel gilt: Spannungsversorgung und Signalausgabe erfolgen über den 8-poligen Einbaustecker (DIN 45326). Pin-Belegung siehe Zeichnung und Tabelle. Dem Contoller liegt eine 8-polige Kabelbuchse für die anwenderseitige Konfektionierung eines eigenen Anschlusskabels bei. Die EMV-Richtlinien werden nur unter diesen Randbedingungen eingehalten.-Verwenden Sie die beiligende 8-polige Kabelbuchse des Controllers.-Verwenden Sie ein doppelt geschirmtes Kabel!-Äußeres Schirmgeflecht umschließt alle Kabeladern.-Inneres Schirmgeflecht umschließt Signalleitungen PIN 3, 7, 8-Inneres Schirmgeflecht an Pin 7-Gesamtschirm über Steckergehäuse an Gehäusemasse-Empfohlener Leiterquerschnitt 0,14 mm²PC3/8 ist ein 3 m langes, fertig konfektioniertes 8-adriges Versorgungs- und Ausgangskabel . Es wird als Zubehör geliefert. Anschlussbelegung und Farbcodes:PIN Kabelfarbe nach DIN 47100Belegung1weiß0 Volt 6grün +24 Volt 2braun +15 Volt 4gelb - 15 Volt 5grau 0 Volt3grün Signal Spannungsausgang 7blau 0 Volt8rot Signal Stromausgangschwarz AußenschirmblankInnenschirm (mit Pin 7, blau, verbinden)Anforderungen an Versorgungs- und Ausgangskabel zur Erfüllung der EMV-Richtlinien.Standard-versorgung OptionaleVersorgungÄußerer Kabelbereichmit GesamtschirmInneres Kabel3-polig mit SchirmungiVersorgungs-u. AusgangskabelBedienen5.1BedienelementeEntfernen Sie den Deckel des Controllers, dazu die vier Schrauben am Deckel lösen;Auf der Demodulator-Platine (siehe Abb. 5.2) befinden sich drei Trimmpotentiometer zum Einstellen -des Nullpunkts: Zero ,-der Verstärkung: Gain , und-der Linearisierung: Linearity (Lin)Abb. 5.2: Potentiometer auf der Demodulator-PlatineDas Messsignal kann im Bereich von 0 V bis +10 V , bei einem max. Ausgangsstrom von 10 mA, eingestellt werden. Der Ausgang ist kurzzeitig kurzschlusssicher. Die Ausgangsimpedanz beträgt weniger als 10 Ohm.Der Controller enthält einen Spannungs- und Stromausgang (4 ... 20 mA).Sensor5.2Kalibrieren und Linearisieren5.2.1Controller DT3010Kalibrieren Sie vor der Messung jeden Messkanal für die Einbau-Umgebung des Sensors und für das Messobjekt. Stellen Sie zum Kalibrieren drei Trimmpotentiometer an drei Abstandspunkten ein. Diese Ab-standspunkte (Messbereichsanfang (Offset), Messbereichsmitte und Messbereichsende) werden durch ein Vergleichsnormal vorgegeben.Vergleichsnormal:1)Spezielle Mikrometer-Kalibriervorrichtung mit nicht drehender Mikrometerspindel (Abb. 5.3, alsZubehör lieferbar!), oder2)Distanzscheiben aus Isoliermaterial (vermindern Kalibiergenauigkeit!)Die Trimmpotentiometer Zero , Gain und Linearity, siehe Kap. 5.1, haben 24 Umdrehungen. In den End-positionen der Trimmpotentiometer hören Sie ein leises Klicken.Drehen Sie die Trimmpotentiometer mit einem Schraubendreher im Uhrzeigersinn , um eine positive Änderung der Ausgangsspannung zu bewirken.Drehen Sie die Trimmpotentiometer mit einem Schraubendreher im Gegenuhrzeigersinn, um eine negative Änderung der Ausgangsspannung zu bewirken.Nehmen Sie den Kalibriervorgang möglichst in der originalen Messumgebung vor. Sollte dies nicht möglich sein, simulieren Sie die Messumgebung.Schließen Sie bei Mehrkanalsystemen alle Kanäle an und synchronisieren Sie die Kanäle (siehe Kap. 4.2).BedienenAbb. 5.3: MikrometerkalibriervorrichtungBedienenSchritt 1: NullpunktabgleichStellen Sie das Messobjekt im Messbereichsanfang zum Sensor ein.Der Messbereichsanfang ist dem Sensortyp zugeordnet.Entnehmen Sie die Werte nebenstehender T abelle.Die Einhaltung des Messbereichsanfangs verhindert Mess-fehler aufgrund eines eventuellen Andrucks des Sensors an das Messobjekt, beziehungsweise mechanische Zerstörung des Sensors.Der Messbereichsanfang entspricht dem Messwert 0.Stellen Sie die Ausgangsspannung am Potentiometer Zero auf 0 V ein.Beispiel: Ausgangsspannung am Messbereichsende = 10VSchritt 2: VerstärkungsabgleichVerschieben Sie das Messobjekt auf halben Messab-stand.Das Objekt befindet sich im Abstand (Messbereichsanfang und 1/2 Messbereich) zum Sensor.Stellen Sie die Ausgangsspannung am Potentiometer Gain auf den halben Wert der gewünschten Span-nung für den vollen Messbereich.Schritt 3: LinearitätsabgleichVerschieben Sie das Messobjekt auf Messbereichs-ende.Das Objekt befindet sich im Abstand (Messbereichsanfang +Messbereich) zum Sensor.Abb. 5.4: Verlauf derAusgangsspannung im Messbereichro s n e S -s s e M h c i e r e b m m -s s e M -s hc i e r e b g n a f n a m m *t i ek h c i l d n i f p m E mm /V V01i e b g n u n n a p s s g n a g s u A 50U 1U 1S 2S 3U 6U 51U 5,0112365150,01,01,02,03,06,05,100,0200,0100,01000,5333,3666,1666,0*Ausgangsspannung für den vollen Messbereich A u s g a n g s s i g n a lanfang01Stellen Sie die Ausgangsspannung am Potentiometer Linearity auf den Wert der für den vollen Messbereich gewünschten Spannung.Wiederholen Sie Nullpunktabgleich, Verstärkerabgleich und Linearitätsabgleich (Schritte 1 bis 3),bis die Ausgangsspannung an den drei Referenzpunkten den vorgegebenen Wert erreicht.Bei einer Kalibrierung auf 10 V Ausgangsspannungssignal wird die höchste Empfindlichkeit im gesamten Messbereich erreicht. Das Rausch-Nutz-Signalverhältnis ist dann am günstigsten.Beispiel: Kalibrierung für Spannungsausgang Sensor U12SW;Zero 0,0 V: Messbereichsanfang;Gain 5,0 V: Messbereichsmitte;Linearity 10,0 V: Messbereichsende;iEMPFEHLUNG:Um die Anzahl der Abgleichzyklen zu reduzieren empfehlen wir nachfolgende Vorgehensweise:Nullpunktabgleich: Stellen Sie das Messobjekt im Messbereichsanfang zum Sensor ein.Stellen Sie die Ausgangsspannung am Potentiometer Zero auf 0 V ein.Verschieben Sie das Messobjekt auf Messbereichsmitte.Stellen Sie die Ausgangsspannung am Potentiometer Gain auf den halben Wert (zum Beispiel 5 Volt)der gewünschten Spannung für den vollen Messbereich (zum Beispiel 10 Volt) ein.Verschieben Sie das Messobjekt auf vollen Messabstand (Messbereichsende).Empfindlichkeit SystemAuf der Anzeige erscheint z.B. 9,7 V Sollwert ist 10,00 VStellen Sie die Ausgangsspannung am Potentiometer Linearity auf den Wert 10,15 V ein.Wiederholen Sie Nullpunktabgleich, Verstärkungsabgleich und Linearitätsabgleich bis die Ausgangs-spannung den vorgegebenen Wert erreicht.Kalibrieren Sie das System für den Ausgangsstrom 4 - 20 mA, wie in Kap. 5.2.1 beschrieben.Nullpunkt- und Verstärkerabgleich (Zero und Gain ) haben keinen Einfluss auf die Gesamtlinearität des Systems!Nach der Linearisierung kann der Nullpunkt verschoben, oder die Kurvensteilheit verändert werden!5.2.2Verschieben der AusgangskennlinieNach der Linearisierung der Grundkennlinie und dem Einbau des Sensors kann der elektrische Nullpunkt nachträglich der Anordnung angepasst werden:Verschieben Sie den elektrischen Nullpunkt bis ca. 30% des Messbereichs (Abb. 5.5) und stellen Sie dazu das Potentiometer Zero nach.Prüfen Sie nach jedem Sensor- oder Sensorkabelwechsel die Kalibrierung.Linearisieren Sie gegebenenfalls den Messkanal neu.iKalibrierung prüfenDer Wert 10,15 V errechnet sich wie folgt:10 V gewünschte Ausgangsspannung + [(10 V gewünschte Ausgangsspannung - 9,7 V angezeigte Aus-gangsspannung) x 0,5]6.Fehler behebenAusgangssignal in negativer Sättigung - Kabel und/oder Sensor nicht angeschlossen (<-12 V)- Sensor hat offene Schleife (Aderbruch)- Kabel ist defektErsetzen Sie Kabel und/oder Sensor.Ausgangssignal oszilliert mit- gegenseitige Beeinflussung durch Interferenzengeringer Frequenz bei Mehrkanalbetrieb Synchronisieren Sie Systeme.Keine AusgangssignaländerungÜberprüfen Sie die Versorgungsspannung.Überprüfen Sie die Zuordnung von Sensortyp und Kabellänge.Überprüfen Sie Sensor und Kabel.Fehler behebenAbb. 5.5: Verschieben der KennlinieZubehör und Ersatzteile7.Zubehör und ErsatzteileZubehör:PS2010Netzteil (Hutschienenmontage), Ausgang 24 VDC, Eingang 240 VAC,umschaltbar für 110 VACPC3/88-adriges Versorgungs- und Ausgangskabel, 3 m lang, mit einem Stecker passendfür DT3010-Elektroniken und Kabelschuhen für Anschluss an KlemmleisteSC30Synchronisationskabel, Länge 30 cm, zur Verbindung der zu synchronisierendenControllerMC25D Mikrometerkalibriervorrichtung; Einstellbereich 0 - 25 mm, Ablesung 2 mm,verstellbarer Nullpunkt, für Sensoren U1 bis U15MC2.5Mikrometerkalibriervorrichtung;Einstellbereich 0 - 2,5 mm, Ablesung 0,1 mm,verstellbarer Nullpunkt, für Sensoren U05, U1, S1 und S2CSP301Aufbereitung und Anzeige von zwei analogen Wegsensor-SignalenErsatzteile:C3Länge 3 m (±15%) mit geraden SMC-KabelbuchsenCE3Länge 3 m (±15%) mit geraden SMC-Kabelbuchsen und Verbindungskupplung; Gesamtlänge 6 mC6Länge 6 m (±15%) mit geraden SMC-Kabelbuchsen8.Haftung für SachmängelAlle Komponenten des Geräts wurden im Werk auf die Funktionsfähigkeit hin überprüft und getestet. Sollten jedoch trotz sorgfältiger Qualitätskontrolle Fehler auftreten, so sind diese umgehend an MICRO-EPSILON zu melden.Die Haftung für Sachmängel beträgt 12 Monate ab Lieferung. Innerhalb dieser Zeit werden fehlerhafte Teile,ausgenommen Verschleißteile, kostenlos instandgesetzt oder ausgetauscht, wenn das Gerät kostenfrei an MICRO-EPSILON eingeschickt wird.Nicht unter die Haftung für Sachmängel fallen solche Schäden, die durch unsachgemäße Behandlung oder Gewalteinwirkung entstanden oder auf Reparaturen oder Veränderungen durch Dritte zurückzuführen sind.Für Reparaturen ist ausschließlich MICRO-EPSILON zuständig.Weitergehende Ansprüche können nicht geltend gemacht werden. MICRO-EPSILON haftet insbesondere nicht für etwaige Folgeschäden.Die Ansprüche aus dem Kaufvertrag bleiben hierdurch unberührt.Im Interesse der Weiterentwicklung behalten wir uns das Recht auf Konstruktionsänderungen vor.9.Außerbetriebnahme, Entsorgung- Entfernen Sie das Sensorkabel, das Versorgungs- und Ausgangskabel am Controller.- Das eddyNCDT3010 ist entsprechend der Richtlinie 2002/95/EG, …RoHS“, gefertigt. Die Entsorgung ist entsprechend den gesetzlichen Bestimmungen durchzuführen (siehe Richtlinie 2002/96/EG).Haftung für Sachmängel。