步进电机学习资料
步进电机及驱动器原理知识【知识讲解】课件

步进电机在医疗设备领域的应用逐渐增多,如手 术机器人、诊断设备和康复设备等。
智能家居
步进电机在智能家居领域的应用也日益广泛,如 智能门锁、智能窗帘和智能照明等。
无人机和机器人
步进电机在无人机和机器人领域的应用也取得了 重要进展,如飞行控制系统和机械臂等。
对未来发展的展望
1 2 3
创新驱动 未来步进电机的技术发展将更加依赖于创新驱动, 包括新材料、新工艺和新技术的应用。
在机器人领域的应用
关节驱动
步进电机常用于机器人的 关节驱动,实现机器人的 各种复杂动作和姿态。
移动机构
步进电机可以驱动机器人 的移动机构,实现机器人 在各种地形和环境中的稳 定行走。
操控手部
步进电机可以用于机器人 的手部操作,实现抓取、 搬运和操作等动作的精确 控制。
在其他领域的应用
医疗器械
航空航天
查并紧固相关部件。
过热或冒烟
可能是由于电机过载、电源电 压过高或驱动器故障,需要检 查电机负载、电源电压和驱动 器状态。
噪声或异响
可能是由于轴承磨损、齿轮损 坏或其他机械故障,需要检查 并更换相关部件。
不通电或无响应
可能是由于电源故障、接线不 良或驱动器故障,需要检查电
源、接线和驱动器状态。
05
步进电机发展趋势
驱动器的选择
根据电机类型选择
不同类型的步进电机需要选择相 应的驱动器,例如直流步进电机 需要选择直流步进电机驱动器, 交流步进电机需要选择交流步进
电机驱动器。
根据控制系统选择
不同的控制系统需要选择相应的 驱动器,例如PLC控制系统需要 选择与PLC控制系统兼容的驱动
器。
根据性能要求选择
2021 步进电机及驱动器基础知识

注:驱动器信号电压比较常用的有5V和24V,我司一般出厂默认5V信号,如客户需要24V合同和送 货单上应该备注清楚。
2.3、步进驱动器面板丝印内容介绍
控制信号
脉冲信号:PU/PUL/PILS+ PU/PUL/PILS-
方向信号:DR/DIR+ DR/DIR-
使能信号:EN/ENA+ EN/ENA-
“IE1000”:表示1000线增量式编码
1.3、步进电机的主要参数
①步进电机的相数:是指电机内部的线圈组数,目前常用的有二相、三相、五相步进电机。 ②步距角:对应一个脉冲信号,电机转子转过的角位移。 ③保持转矩:是指步进电机通电但没有转动时,定子锁住转子的力矩。 ④丢步:电机运转时运转的步数,不等于理论上的步数,一般原因是电机异常或者负载过重。 ⑤运行矩频特性:电机在某种测试条件下测得运行中输出力矩与频率关系的曲线。
PLC、运动控制卡、单片机等
步进电机控制原理图
①二相步进电: 步距角为1.8或0.9度的4线、6线、 8线步进电机
②三相步进电机: 步距角为1.2度的步进电机
2.2、步进驱动器命名规则:
MA D 5 56 R - M
① ②③ ④ ⑤ ⑥
①驱动器相数:MA:二相混合式步进驱动器, MC:三相混合式步进驱动器
银色
直流:DC20-50V
银色 黑色 黑色 黑色 蓝色 蓝色 蓝色 银色 银色 银色
交、直流通用:AC24-80V 交、直流通用:AC24-80V 直流:DC24-80V 交流:AC85-265V 直流:DC18-50V 交、直流通用:AC18-80V 交、直流通用:AC18-80V 交流:AC110-240V 交流:AC110-240V 交H=平行双扁
步进电机基础知识入门

步进电机小知识1.什么是步进电机?步进电机是一种将电脉冲转化为角位移的执行机构。
通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。
您可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
2.步进电机分哪几种?步进电机分三种:永磁式(PM),反应式(VR)和混合式(HB)永磁式步进一般为两相,转矩和体积较小,步进角一般为7.5度或15度;反应式步进一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。
在欧美等发达国家80年代已被淘汰;混合式步进是指混合了永磁式和反应式的优点。
它又分为两相和五相:两相步进角一般为 1.8度而五相步进角一般为 0.72度。
这种步进电机的应用最为广泛。
3.什么是保持转矩(HOLDING TORQUE)?保持转矩(HOLDING TORQUE)是指步进电机通电但没有转动时,定子锁住转子的力矩。
它是步进电机最重要的参数之一,通常步进电机在低速时的力矩接近保持转矩。
由于步进电机的输出力矩随速度的增大而不断衰减,输出功率也随速度的增大而变化,所以保持转矩就成为了衡量步进电机最重要的参数之一。
比如,当人们说2N.m的步进电机,在没有特殊说明的情况下是指保持转矩为2N.m的步进电机。
4.什么是DETENT TORQUE?DETENT TORQUE 是指步进电机没有通电的情况下,定子锁住转子的力矩。
DETENT TORQUE 在国内没有统一的翻译方式,容易使大家产生误解;由于反应式步进电机的转子不是永磁材料,所以它没有DETENT TORQUE。
5.步进电机精度为多少?是否累积?一般步进电机的精度为步进角的3-5%,且不累积。
6.步进电机的外表温度允许达到多少?步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降乃至于失步,因此电机外表允许的最高温度应取决于不同电机磁性材料的退磁点;一般来讲,磁性材料的退磁点都在摄氏130度以上,有的甚至高达摄氏200度以上,所以步进电机外表温度在摄氏80-90度完全正常。
步进电机基础

8
しやすいです。 . 相励磁方式 によるフルステッ ( . ° / ハ ゚ ス ) 場合 ・ ・ 非常 に 理解 しやすいです 。 プ( 2 1 プ 1 8 ル の ・・
2. 1相励磁方式整步旋转(1.8°/Pulse)…非常好理解 1相励磁方式整 相励磁方式整步 1.8° Pulse)
4根引线 根引线
三相步进 三相步进
五相步进 五相步进
3根引线 根引线
SANYO DENKI (Shenzhen) CO., LTD.
5根引线 根引线
步进电机旋 步进电机旋转的原理…以二相步进 2 步距角1.8°为例基本ステップ角 ピングモータ 回転原理例・ 基本 距角1.8° の回転原理例 基本步 ステッ 机旋转的原理…以二相步进・相ステッピングモータ、基本ステップ角1.8°の場合 の
12
实际动作效果
给A相通电
给B相通电
SANYO DENKI (Shenzhen) CO., LTD.
13
如何驱动步进电机
脉冲
电流指令
以基本步距角为1.8°/Pulse为 以基本步距角为1.8°/Pulse为例 1 Pulse 10 Pulse 200 Pulse
SANYO DENKI (Shenzhen) CO., LTD.
を回転 速度制御、 速度制御、 ①~系统可以用来进行简单的速度和位置控制。 ステッ ピングモータ 回転( を回転( 步进系だけで、 步进④だけで、 可以用来进 简单的速度和位置控制位置制御) 。 的速度和位置控制位置制御) る。 簡単、 さ せるこ ができ 。 取り いが簡単、 スト と る 扱いが簡単 コ ,安価 … 容易操作 价格便宜! 容易操作,价格便宜!
步进电机详细讲解PPT学习教案
→ 转子转向
定子绕组通断电转换频率 → 转子转速
定子绕组通断电次数
→ 转子转角
❖ 通断电方式
三相单三拍 A →B →C →A (K=1)
三相双三拍 AB →BC →CA →AB (K=1)
三相六拍
A →AB →B →BC →C →CA →A (K=2)
第2页/共13页
上一页 下一页
4.步进电机的选择
Jm 为电机转 动惯量
④ 电机运行速度和最高工作频率能满 足工作 台切削 加工 和快移 要求。
第3页/共13页
上一页下一页
④ 计算步进电机运行频率 步进电机运行频率 f ( Hz)
2)步进电机选择步骤
f= V / (60)
式中 , V ——工作台进给速度 mm/min
第4页/共13页
上一页下一页
2)步进电机选择步骤
第12页/共13页
② 计算惯量
i. 图示的一级齿轮减速系
统
nz1
nm
nz2 nz2
n.
V=
z2
t
式中 V——工作台移动速度 m/min
t——丝杆导程 m
第8页/共13页
2)步进电机选择步骤
② 计算惯量
J leq
Jz1 J
J z1
z2(
1 i2
nz 2 nm
Jz
)
2
2 Js
1 i2
(Jnnszm2)24MMw2tiw22(
Vw
2 nm
)2
Jz1
1 [ Jz2 i2
Js
M wt 2
4 2
]
.
式中 Jz1 —— 齿轮1的转动惯量 kg
m2
步进电机及其控制讲义
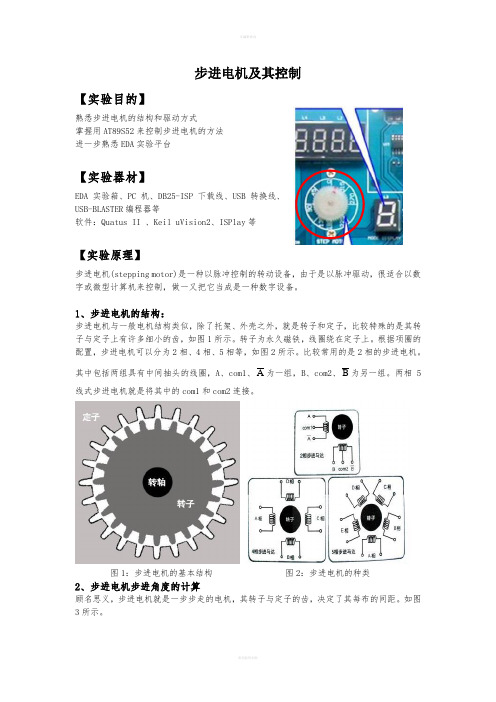
步进电机及其控制【实验目的】熟悉步进电机的结构和驱动方式掌握用AT89S52来控制步进电机的方法进一步熟悉EDA实验平台【实验器材】EDA实验箱、PC机、DB25-ISP下载线、USB转换线、USB-BLASTER编程器等软件:Quatus II 、Keil uVision2、ISPlay等【实验原理】步进电机(stepping motor)是一种以脉冲控制的转动设备,由于是以脉冲驱动,很适合以数字或微型计算机来控制,做一又把它当成是一种数字设备。
1、步进电机的结构:步进电机与一般电机结构类似,除了托架、外壳之外,就是转子和定子,比较特殊的是其转子与定子上有许多细小的齿,如图1所示。
转子为永久磁铁,线圈绕在定子上。
根据项圈的配置,步进电机可以分为2相、4相、5相等,如图2所示。
比较常用的是2相的步进电机。
其中包括两组具有中间抽头的线圈,A、com1、A为一组,B、com2、B为另一组。
两相5线式步进电机就是将其中的com1和com2连接。
图1:步进电机的基本结构图2:步进电机的种类2、步进电机步进角度的计算顾名思义,步进电机就是一步步走的电机,其转子与定子的齿,决定了其每布的间距。
如图3所示。
图3:步进电机的齿间距若转子上有N 个齿,则其齿间距θ为:N360︒==转子齿间距θ而步进角度δ为:P22θδ=⨯=相数转子齿间距以常用的2相式50齿步进电机为例,θ=360°/50=7.2°δ=7.2°/(2×2)=1.8°3、步进电机的驱动:步进电机的驱动是靠定子线圈激磁后,将邻近转子上相异磁极吸引过来实现的。
因此,线圈排列的顺序,以及激磁信号的顺序就很重要。
以2相式步进电机为例,其驱动信号有1相驱动、2相驱动和1-2相驱动三种。
图4:步进电机的驱动方式:1相驱动、2相驱动和1-2相驱动。
(1)、1相驱动:任何一个时间,只有一组线圈被激磁,其他线圈在休息,因此产生的力矩较小,但这种激磁方式最简单,信号依次为:1000-0100-0010-0001-1000……(正转)0001-0010-0100-1000-0001……(反转)有四种不同的信号呈现周期性的变化。
步进电机及其工作原理课件

优化电机设计,提高电机的效率和功 率密度,以降低能耗和提高工作效率。
智能化、网络化的趋势
集成传感器和控制系统,实现电机状态的实时监测和自动 调整。
通过互联网和无线网络实现远程监控和控制,提高生产效 率和设备利用率。
新材料、新工艺的应用
步进电机的效率与发热
效率(Efficiency)
步进电机在工作过程中,输出功率与输入功率的比值,反映了电机的能量利用效 率。
发热(Heat Generation)
由于线圈电阻以及铁芯的磁滞、涡流等损失,步进电机在工作过程中会产生热量, 需要采取散热措施以防止过热。
05
步机的展 与展望
高精度、高效率的追求
摄影和摄像设备
用于云台的控制和调整。
02
步机的工作理
步进电机的结构
步进电机主要由定子和转子组成。定子通常由一系列的磁极组成,而转 子则由一系列的导电材料组成,这些导电材料在磁场的作用下会产生转 矩,从而驱动转子转动。
步进电机的磁极通常有四个、六个或八个,这些磁极按照一定的顺序排 列,形成不同的磁场分布。
步机及其工作理
• 步进电机简介 • 步进电机的工作原理 • 步进电机的驱动电路 • 步进电机的性能参数 • 步进电机的发展趋势与展望
01
步介
步进电机的定义
01
步进电机是一种将电脉冲信号转 换成角位移或线位移的机电元件, 其转动角度或转动圈数与输入的 脉冲数呈线性关系。
02
步进电机由转子、定子和控制电 路组成,转子通常由永磁体构成, 定子则由线圈绕组构成。
03
步机的路
驱动电路的组成
电源
步进电机基础知识培训

四、步进电机的应用:
20BYJ /24BYJ:空调、监控设备、舞台灯光、医疗设备 35BYJ:电子锁、智能马桶、阀门、家用电器 15BY:电脑光驱、POS机 20BY/25BY:打印机、复印机、扫描仪、电子锁 35BY/42BY:电子锁、智能马桶、阀门、家用电器 15BY:电脑光驱、P主要性能参数:
1、安装尺寸:指电机外型尺寸及对安装有影响的一些尺寸。
05
2、绝缘电阻:电机绕组与外壳之间的绝缘电阻(不得小于 10MΩ)。 3、绝缘介电强度:电机绕组与外壳之间所能承受的电压(应能承受 50Hz、500V历时1秒无击穿或飞弧,且漏电流不应大于1mA)。 4、电阻:某一组线圈的电阻值,(允许偏差±7%,各极相差±4%)。 5、旋转方向:电机按规定的供电顺序运行时,输出轴的旋转方向 (顺时针:CW;逆时针:CCW),改变旋转方向只需改变通电顺序,即 连接线排序就可以了。
五、步进电机的命名与释义
例::
24 BYJ 48 - A
派生代号 性能参数代号 产品名称代号 机座号
1、机座号: 电机外径的毫米数以阿拉伯数字表示; 2、产品名称代号: 用大写汉语拼音字母BYJ表示(BY---永磁步进电动机, J---减速); 3、性能参数代号: 由两位阿拉伯数字组成,第一位数字表示相数,第二位数字表示 极对数; 4、派生代号:包括性能参数派生和结构派生,性能参数派生和结构派生用大写英文 字母A、B、 C......表示,但不能使用 I、O字母,若字母不够使用可字母后面加阿拉伯数字1、 2、3......表示.
内部培训资料之 --步进马达基础知识
2010.5.17
一、什么是步进电机?
步进电机是一种将电脉冲转化为角位移或线 位移开环控制元件。通俗一点讲:当步进驱动器 接收到一个脉冲信号,它就驱动步进电机按设定 的方向转动一个固定的角度及(步进角)。
《步进电机培训讲义》

第一篇 步进电机的基本知识
• • • • • 三、 步进电动机分类 1、HB型混合式步进电动机(此种为先歌生产的电机) 2、PM型永磁式步进电动机 3、VR型反应式步进电动机 其中永磁式步进电动机一般为两相,转矩和体积较小,步进角一般为 7.5度 或15度;反应式步进电动机一般为三相,可实现大转矩输出, 步进角一般为1.5度,但噪声和振动都很大。在欧美等发达国家80年 代已被淘汰;混合式步进电动机是指混合了永磁式和反应式的优点。 从性能上看,它可以做成像反应式一样的小步距,也具有永磁式控制功 率小的优点。它又分为两相和五相:两相步进角一般为1.8度,而五 相步进角一般为 0.72度。这两种混合式步进电机的应用最为广泛。
第二篇 步进电动机常遇到的一些问题及解决方法
• • • • • • • 三、电机的高频性能上不去,通过采用以下办法可以解决: 电机的高频性能上不去,通过采用以下办法可以解决: 1、减小时间常数 电流上升时驱动电路的时间常数Ta为: Ta=L/Ra L----绕组的电感; Ra----通电回路的总电阻,包括 绕组线圈电阻、限流电阻R1和晶体管结电阻。 由公式可以看出,增加电阻Ra 可以减小时间常数;但增加Ra会 使通电回路中电流值减小,所以,为了保证通电回路中电流不变, 在增加电阻Ra的同时,还要提高电源的电压。 2、改进工作方式 采用多相励磁的工作方式,例如:三相步进电动机的双三拍、 六拍方式。多相励磁工作方式使每一相通电的时间延长了,电动 机就能获得较多的能量,使高频时输出转矩增加。
第一篇 步进电机的基本知识
• (9)、惯频特性 • 在负载力矩一定时,频率和负载惯量之间的关系,称为惯频特性。 惯频特性分为起动惯频特性和运行惯频特性。 • 五、步进电动机应用 • 主要应用在如下几个方面: • 1、舞台灯光 • 2、计算机外围设备:磁盘驱动、磁头驱动、打印机、XY绘图仪 • 3、商务机器:复印机、传真机 • 4、工业计测仪器 :记录仪 • 5、工作机械 : 数控机床、机器人、纺织机械
《步进电机》课件

THANKS
感谢观看
步进电机的分类与特点
分类
根据相数可分为单相、两相、三 相和多相步进电机;根据结构可 分为反应式、永磁式和混合式步 进电机。
特点
步进电机具有较高的控制精度、 响应速度快、运行平稳、低噪音 等优点,广泛应用于各种自动化 设备和控制系统。
步进电机的发展历程与趋势
发展历程
步进电机最初由美国在上世纪初发明,经过近百年的发展,技术不断进步,性 能不断提升。
检查机械部分
检查电机机械部分是否有卡滞、松 动等现象,确保机械部分正常运行 。
步进电机的寿命与可靠性
正确使用
按照电机使用说明书正确 使用,避免超载、过热等 现象。
定期维护
按照维护计划定期对电机 进行维护,延长电机使用 寿命。
环境因素
注意电机运行环境,避免 高温、潮湿、腐蚀等恶劣 环境对电机寿命的影响。
在自动化生产线中,步进电机通常与PLC控制系统配合使用,实现生产线的自动化 控制和监控。
步进电机在机器人领域的应用
步进电机是机器人技术中的重要 组成部分,用于驱动机器人的关
节、手臂、腿部等运动部件。
步进电机能够实现机器人的灵活 运动和精确控制,提高机器人的
运动性能和工作效率。
在机器人领域中,步进电机通常 与伺服控制系统配合使用,实现 机器人的高精度控制和稳定运行
《步进电机》课件
目录
• 步进电机简介 • 步进电机的结构与组成 • 步进电机的驱动控制 • 步进电机的应用场景与案例 • 步进电机的维护与保养
01
步进电机简介
步进电机的定义与工作原理
步进电机是一种将电脉冲信号转换成角位移或线位移的机电元件,通过控制输入 的脉冲数量和频率,实现电机的步进转动。
步进电机原理培训资料

步进电机原理培训资料1. 介绍步进电机是一种特殊的电动机,其独特的工作原理使其在许多应用中起着重要的作用。
本文档将介绍步进电机的基本原理、分类和工作方式,以及与步进电机相关的一些常见术语和应用。
2. 基本原理步进电机通过使电机的旋转转化为一系列离散的角度步进来工作。
它由定子和转子组成,定子是电磁铁,转子是由磁性材料制成的。
步进电机根据输入的电流脉冲控制转子的位置和旋转方向。
3. 工作方式步进电机的工作方式可以分为两种:单相和双相。
单相步进电机只需要一个电源线来控制电机的运行,而双相步进电机需要两个电源线来控制电机的转向和运行。
3.1 单相步进电机单相步进电机由一个定子线圈和一个转子组成。
通过改变定子线圈的电流方向来控制电机的运行。
单相步进电机具有简单的结构和较低的成本,并且适用于一些低功率的应用。
3.2 双相步进电机双相步进电机由两个定子线圈和一个转子组成。
通过控制定子线圈的电流来控制电机的运行和转向。
双相步进电机具有较高的分辨率和较高的扭矩输出,适用于一些高精度和高功率的应用。
4. 步进电机的分类步进电机根据结构和工作原理的不同,可以分为以下几类:4.1 可变磁阻式步进电机可变磁阻式步进电机利用转子磁性材料的不同磁导率来实现步进运动。
通过改变磁阻来控制电机的步进角度和运行速度。
4.2 永磁式步进电机永磁式步进电机利用转子上的永磁体和定子线圈之间的磁性相互作用来实现步进运动。
由于其结构简单,响应速度快,因此在许多应用中得到广泛应用。
4.3 混合式步进电机混合式步进电机是可变磁阻式步进电机和永磁式步进电机的结合,具有两种类型的工作方式。
它结合了可变磁阻式步进电机的低速高扭矩特性和永磁式步进电机的高速高分辨率特性。
5. 常见术语解释•步距角(Step Angle):步进电机每次转动的角度,通常以度数表示。
•步进精度(Step Accuracy):步进电机运动时实际步进角和理论步进角之间的误差。
•步进电机驱动器(Stepper Driver):控制步进电机运行的电子设备,根据输入的信号控制步进电机的运行状态和步进角度。
步进电机技术培训资料

电机技术资料1、步进电机选型注意事项?a、步进电机应用于低速场合---每分钟转速不超过1000转,(0.9度时6666PPS),最好在1000-3000PPS(0.9度)间使用,可通过减速装置使其在此间工作,此时电机工作效率高,噪音低。
b、步进电机最好不使用整步状态,整步状态时振动大。
c、由于历史原因,只有标称为12V电压的电机使用12V外,其他电机的电压值不是驱动电压伏值,可根据驱动器选择驱动电压(建议:57BYG采用直流24V-36V,86BYG 采用直流50V,110BYG采用高于直流80V),当然12伏的电压除12V恒压驱动外也可以采用其他驱动电源,不过要考虑温升。
d、转动惯量大的负载应选择大机座号电机。
e、电机在较高速或大惯量负载时,一般不在工作速度起动,而采用逐渐升频提速,一电机不失步,二可以减少噪音同时可以提高停止的定位精度。
f、高精度时,应通过机械减速、提高电机速度,或采用高细分数的驱动器来解决,也可以采用5相电机,不过其整个系统的价格较贵,生产厂家少,其被淘汰的说法是外行话。
电机不应在振动区内工作,如若必须可通过改变电压、电流或加一些阻尼的解决。
g、应遵循先选电机后选驱动的原则。
2、步进电机的分类?相混合式步进电机、反应式步进电机、永磁式步进电机4、如何配用步进电机驱动?根据电机的电流,配用大于或等于此电流的驱动器。
如果需要低振动或高精度时,可配用细分型驱动器。
对于大转矩电机,尽可能用高电压型驱动器,以获得良好的高速性能。
5、使用步进电机驱动器注意事项?1)电源电压是否合适(过压很可能造成驱动模块的损坏);对于直流输入的+/-极性一定不能接错,驱动控制器上的电机型号或电流设定值是否合适(开始时不要太大);2)控制信号线接牢靠,工业现场最好要考虑屏蔽问题(如采用双绞线);3)不要开始时就把需要接的线全接上,只连成最基本的系统,运行良好后,再逐步连接。
4)一定要搞清楚接地方法,还是采用浮空不接。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
国内直到90年代初才开始普及计算机,当时一台
286机器的价格约为1.5万元。
10
4. 32位微处理器:Intel80386/80486 /Pentium
1985年正式发布,开创了32位微处理器;时钟频率 为33M,80386使32位CPU成为PC工业的标准。
1989年80486推出,时钟频率可达50M。并由此出 现了CPU倍频技术该技术使CPU内部工作频率可达处 理器外频的2-3倍
处理能力,统称为第一代超大规模集成电路微处理
器。
1981年8088芯片首次用于IBM PC中,开创了 全新的微机时代。个人电脑概念在全世界范围内发 展起来。个人电脑从此走进人们的工作和生活。
1982年由Intel 生产开发Intel80286。处理速度 为20M。
IBM将其用于AT(先进技术)机中,引起了极大 的轰动。
13
(一)微处理器CPU
CPU在内部结构上应包含: 1. 算术逻辑部件(ALU) 2. 累加器和通用寄存器组 3. 程序计数器PC(指令指针IP)、指 令寄存器IR和译码器ID 4. 时序和控制部件
14
(二)微型计算机
由CPU、存储器、输入/输出接口电路和 系统总线构成。
CPU
ROM RAM
数据信息
保护的数据 常用于响应中断或子程序调用
35
入栈指令 PUSH SS 0200
PUSH CX
SP 0008 +
若已知SS=0200H,
–2 2000
SP=0008H, CX 12FA
CX=12FAH, 操作示意图如图所示:
2006 FA 2007 12 2008
7
1. 4位微处理器:Intel4004,4040
1971年由Intel 为高级计算器生产开发 Intel4004,后改进为通用的4位微处理器 Intel 4040。
1972年Intel 生产8位微处理器Intel 8008。
以上统称为第一代微处理器。
8
2. 8位微处理器:Z80, Intel8080
I/O 控制信息 接口 状态信息
AB DB CB
外 设
15
(三)微型计算机系统
微型计算机 系统软件 外部设备
算术逻辑部件
微
累加器、寄存器 处
控制部件
理 器
微 型
微
内部总线
计型
算计
存储器(ROM,RAM)
机算
机
输入/输出接口
系
统
系统总线
外围设备
系统软件
16
1.2 8086/8088微处理器
一、8086/8088的寄存器结构 二、8086/8088的编程结构 三、8086/8088的存储器组织 四、8086/8088的IO端口组织 五、8086/8088的状态标志寄存器
1993年全面超越486的新一代586 CPU问世,为了 摆脱486时代处理器名称混乱的困扰,Intel把自己新 一代产品命名为Pentium(奔腾),以区别当时AMD 及CYRIX的产品。内部时钟频率为75-120M。
1997-1998年出现Pentium II,内部时钟为350- 400M,外部时钟首次采用100M。
DS 16+SI ES 16+DI SS 16+EA
32
三、 8086/8088的存储器组织(续)
说明: 以8088为CPU的IBM PC系统中,存储器
首尾两部分的用法是固定的。即 (1)00000H~003FFH共1K存储单元用来
存放中断向量--中断向量表。 (2)FFFF0H~FFFFFH,最底部的16个单
1999年出现Pentium III ,将外部时钟提高到133M, 内部时钟达到1000M(1G)。
2000年底Intel 推出Pentium 4,内部时钟达到了
1.4G以上
11
5. 64位微处理器:
64位处理器竞争日趋激烈,除去IBM、HP、 Motorola、Sun之外,Intel发布的64位 Itanium引起业界震动,AMD也推出下一 代64位微处理器架构——“Hammer”。
指令指针寄存器IP 20位地址加法器 指令队列--6个字节(8086)
4个字节(8088)
22Leabharlann 2. 执行部件(EU)功能:负责指令的执行。 组成:4个数据寄存器
2个指针寄存器 2个变址寄存器 1个状态标志寄存器 1个算术逻辑单元(ALU)
23
3. BIU和EU的动作管理
(1)指令队列中有2个字节空(对8086而 言)或1个字节空(对8088而言),BIU取指 令;
访问存储器 类型
取指令 堆栈操作 访问变量
源字符串 目的字符串 基址数据、
BP间址
隐含 段基地
址 CS SS DS
DS ES SS
可代换的 段基地址
无 无 CS/ES/SS
CS/ES/SS 无
CS/DS/SS
位移量
IP SP 有效地址 EA SI DI 有效地址 EA
物理地址 计算公式
CS 16+IP SS 16+SP DS 16+EA
CS 代码段寄存器 DS 数据段寄存器 SS 堆栈段寄存器 ES 附加段寄存器
19
二、 8086/8088的编程结构
8086/8088的编程结构是一种按功能划分 的结构。
分成两个部分: 总线接口部件(BIU) 执行部件 (EU)
20
通 AH AL
EU BIU
20位
用 寄 存
BH BL CH CL DH DL
数据寄存器
指针寄存器 变址寄存器 控制寄存器 段寄存器
AX AH AL 累加器 BX BH BL 基 数 CX CH CL 计 数 DX DH DL 数 据
SP 堆栈指针 BP 基数指针 SI 源 变 址 DI 目的变址
八个8位或 四个16位
通用 寄存器
也可作为16位 数字寄存器
IP 指令指针 PSW 状态标志
CS 0100H DS 2100H SS 4600H ES A000H
64K数据 21000H 段寄存器
CS 0100H
64K堆栈 46000H
DS 0200H SS 0280H
64K附加 A0000H
01000H 4K程序
02000H 2K数据 100H堆栈 02800H
31
访问存储器类型与偏移地址来源的关系
00000H 00001H 00002H
78H
内容
每个存储单元分配一个唯一 00003H 1AH
的地址。
存储器的容量以K(1K= 210=1024)为基本单位。
如果数据以字为单位,该
如何表示呢?
FFFFCH FFFFDH
FFFFEH
FFFFFH
25
三、 8086/8088的存储器组织(续)
1. 存储单元(续)
系统
3
一、 通用计算机的结构
外部设备
输入设备
存储器
运算器 输出设备
控制器
CPU中央处理单元
主机
主机+外部设备+电源=计算机硬件
4
二、微型计算机的基本结构
CPU
ROM RAM
数据信息
I/O 控制信息 接口 状态信息
AB DB CB
外 设
由CPU、存储器、输入/输出接口电路和系 统总线构成。
5
三、 微型计算机的特点和发展
(一)特点 1. 体积小,重量轻 2. 价格低廉 3. 可靠性高,结构灵活 4. 应用面广
(二)发展 提高集成度、提高功能和速度、增
加外围电路的功能和种类。
6
四、微型机的分类
按微处理器的字长作为微型机的分类标准: 1. 4位微处理器:Intel4004,4040 2. 8位微处理器:Z80, Intel8080 3. 16位微处理器:Intel8086/8088 4. 32位微处理器:Intel80386/80486 /Pentium 5. 64位微处理器:
如果数据以字为单位,该 如何表示呢?
一个字在存储器中要占用 连续的两个字节单元,其 地址采用这两个单元的低 地址表示。
地址 存储器
00000H 00001H 00002H AB 规则 00003H 12 存放 00004H 00005H AB 不规则 00006H 34 存放
[00002H] = 12ABH [00005H] = 34ABH
SP
取指 执行 存结果 取指 执行 存结果
器
BP
段R
DI
16位
CS
SI
DS
I/O
SS ES
IP IP
内部暂存器
控制 电路
运算寄存器
ALU 标志
执行部分 控制电路
123456 指令队列缓冲器
图2.1 8086的编程结构
I/O 接口
外部 总线 存储 器
21
1. 总线接口部件(BIU)
功能:负责与存储器、外设端口传送数据。 组成:4个段寄存器
17
1.2 8086/8088微处理器
8086--Intel系列的16位CPU,2.9万个 晶 体 管 , HMOS 工 艺 , 单 一 5V , 时 钟 5~10MHz。
8086有16根数据线,20根地址线,寻址空 间1MB。
8088有外部数据线8根,20根地址线,寻址 空间1MB。
18
一、8086/8088的寄存器结构
微机原理与应用
总学时:80学时 授 课:56学时 实验:24学时
1
第一章 微型计算机基础知识
1.1 微型计算机概述 1.2 8086/8088微处理器
2
1.1 微型计算机概述
一、通用计算机的结构 二、微型计算机的基本结构 三、微型计算机的特点及发展 四、微型计算机的分类 五、微处理器、微型计算机和微型计算机