证据理论总结
证据理论总结

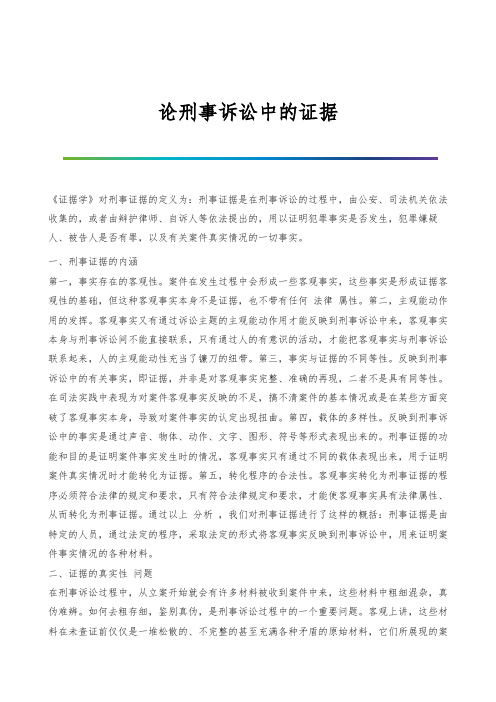
Pl(A) 拒绝证据区间
拟信区间
• 信任度是对假设信任程度的下限估计—悲 观估计;
• 似然度是对假设信任程度的上限估计—乐 观估计。
• 下面用例子进一步说明下限与上限的意义:
• A(0.25,1):由于Bel(A)=0.25,说明对A为真有一 定程度的信任,信任度为0.25;另外,由于Bel(¬A)= 1-Pl(A)=0,说明对¬A不信任。所以A(0.25,1) 表示对A为真有0.25的信任度。
3. 概率分配函数不是概率
信任函数
定义2 :命题的信任函数Bel:2D→[0,1],且 Bel(A)=ΣM(B)对所有的A⊆D
B⊆A
其中2D表示D的所有子集。 Bel函数又称为下限函数,Bel(A)表示对命
题A为真的信任程度。 由信任函数及概率分配函数的定义推出: Bel(Φ)=M(Φ)=0 Bel(D)=ΣM(B)=1
电气12-4 陈仿雄
目录
• 一、证据理论 基本内 容
• 二、基于证据理论的 不完全信息多属性决 策方法论文的感想
• 三、新无量刚指标的 概念
• 四、故障诊断常用的 方法
• 五、K-NN算法
证据理论
证据理论是由德普斯特(A.P.Dempster) 首先提出,并由沙佛(G.Shafer)进一步 发展起来的一种处理不确定性的理论,因 此又称为D-S理论。
B⊆D
似然函数
定义3: 似然函数Pl:2D→[0,1],且 Pl(A)=1一Bel(¬A) 其中A⊆D 似然函数的含义:由于Bel(A)表示对A
为真的信任程度,所以Bel(¬A)就表示对非 A为真,即A为假的信任程度,由此可推出 Pl(A)表示对A为非假的信任程度。 似然函数又称为不可驳斥函数或上限函数。
证据制度一般理论

F、刑事诉讼中的见证人应视为“特殊的证人”。 (7)证人的义务: A、作证的义务 B、如实作证的义务 C、保守公安司法机关询问的情况以及陈述内容 的秘密,不向外泄露。 D、遵守法庭秩序的义务。 (8)证人的权利 A、司法人员到证人单位进行询问时,证人有权 要求其出示证明文件。 B、证人有权按照自己知道的案件情况提供证言。
(5)意义 A、保障无罪的人不受刑事追究,保护公民的合 法权益不受侵犯,防止发生冤假错案的重要保 证,是实行辩护的重要手段。 B、证据是对群众进行法制教育的工具。
二、证据制度的理论基础 证据制度的理论基础
证据制度是指法律规定的关于在诉讼中如何收集 证据、如何审查和判断证据、如何运用证据认 定案情的制度和规则。 理论基础有二: 1、辩证唯物主义认识论与刑事证据制度 2、程序正、一般来说比较客观真实,直接、生动、形象、 具体。 B、由于主客原因,可能有虚假、不真实的一面。 5、犯罪嫌疑人、被告人的供述和辩解 犯罪嫌疑人、 犯罪嫌疑人 (1)指犯罪嫌疑人、被告人就有关案件情况,向 司法工作人员所作的陈述,即“口供”。 (2)三种情形: A、犯罪嫌疑人、被告人承认自己犯罪并就有关事 实所作的供述。 B、犯罪嫌疑人、被告人说明自己无罪或罪轻的辩 解。 C、犯罪嫌疑人、被告人揭发、举报他人犯罪行为 的陈述,即攀供。
F、各种公证文书、裁判文书等。 (4)书证的特征: A、表现形式及制作方式的多样性; B、记载的内容和反映的思想必须同案件相关联; C、内容和思想可供人们认识和了解,用文字或 者符号、图形的方式来记载或表达。 (5)使用书证的条件有三: A、书证所表达的思想内容和意图同案件事实有 联系。 B、所记载的内容可以被认知。 C、要有明确的制作者。
五、证据的分类
1、概念和意义 (1)概念:是指在理论上将刑事证据按照不同 的标准划分为不同的类别。 目的:在于研究不同类别证据的特点及其运用规 律,以便指导办案工作。
证据运用知识点总结

证据运用知识点总结一、证据的概念和分类1. 证据的定义证据是指可以证明某种事实或者某种观点的材料或者信息。
在法律上,证据是指可以用来证明诉讼事实的各种证明材料。
在科学研究中,证据则是指用来支持科学观点和理论的各种实验数据和调查结果。
2. 证据的分类根据其来源和性质,证据可以分为直接证据和间接证据。
直接证据是指可以直接证明某一事实的证据,如目击证人的证言,视频录像等。
间接证据则是指不能直接证明某一事实,但可以通过推理和推断间接证明的证据,如DNA鉴定、电话录音等。
二、证据的收集和保全1. 证据的收集证据的收集是指在案件发生后,采集、整理和保管可能与案件相关的信息和材料的过程。
对于直接证据,应尽快将其收集起来,以免遗失或被篡改。
对于间接证据,需要通过科学实验和调查来获取。
2. 证据的保全证据的保全是指妥善保存证据,以免证据遭到破坏或篡改。
对于书面证据,可以通过复印或者扫描等方式进行保全。
对于物证,需要加强保护和监管,避免证据被破坏。
三、证据的审查和鉴定1. 证据的审查在诉讼过程中,法院会对当事人提供的证据进行审查,判断其真实性和权威性。
如果证据存在瑕疵或者不足以证明事实,法院可以要求当事人提供更多的证据或者采取其他方式进行证明。
2. 证据的鉴定对于特定的证据,如果当事人对其真实性有争议,法院可以对其进行鉴定。
例如,对于物证,需要通过法医鉴定或者科学实验来确定其真实性和价值。
对于书面证据,可以通过笔迹鉴定等方式进行鉴定。
四、证据的运用和效力1. 证据的运用在诉讼过程中,当事人可以通过提交证据来证明其主张。
法院会根据证据的真实性和权威性,判断其是否能够证明事实。
如果证据充分、确凿,法院会依据其作出判决。
2. 证据的效力证据的效力是指证据能够对争议事实起到证明和说明的作用。
对于直接证据,效力通常较强,可以直接证明争议事实。
对于间接证据,效力则需要依靠推理和推断来进行判断。
五、证据的保密和公开在诉讼过程中,对于涉及商业秘密、个人隐私等敏感信息的证据,法院会对其进行保密处理,以保护相关当事人的权益。
论刑事诉讼中的证据
论刑事诉讼中的证据《证据学》对刑事证据的定义为:刑事证据是在刑事诉讼的过程中,由公安、司法机关依法收集的,或者由辩护律师、自诉人等依法提出的,用以证明犯罪事实是否发生,犯罪嫌疑人、被告人是否有罪,以及有关案件真实情况的一切事实。
一、刑事证据的内涵第一,事实存在的客观性。
案件在发生过程中会形成一些客观事实,这些事实是形成证据客观性的基础,但这种客观事实本身不是证据,也不带有任何法律属性。
第二,主观能动作用的发挥。
客观事实又有通过诉讼主题的主观能动作用才能反映到刑事诉讼中来,客观事实本身与刑事诉讼间不能直接联系,只有通过人的有意识的活动,才能把客观事实与刑事诉讼联系起来,人的主观能动性充当了镰刀的纽带。
第三,事实与证据的不同等性。
反映到刑事诉讼中的有关事实,即证据,并非是对客观事实完整、准确的再现,二者不是具有同等性。
在司法实践中表现为对案件客观事实反映的不足,搞不清案件的基本情况或是在某些方面突破了客观事实本身,导致对案件事实的认定出现扭曲。
第四,载体的多样性。
反映到刑事诉讼中的事实是通过声音、物体、动作、文字、图形、符号等形式表现出来的。
刑事证据的功能和目的是证明案件事实发生时的情况,客观事实只有通过不同的载体表现出来,用于证明案件真实情况时才能转化为证据。
第五,转化程序的合法性。
客观事实转化为刑事证据的程序必须符合法律的规定和要求,只有符合法律规定和要求,才能使客观事实具有法律属性、从而转化为刑事证据。
通过以上分析,我们对刑事证据进行了这样的概括:刑事证据是由特定的人员,通过法定的程序,采取法定的形式将客观事实反映到刑事诉讼中,用来证明案件事实情况的各种材料。
二、证据的真实性问题在刑事诉讼过程中,从立案开始就会有许多材料被收到案件中来,这些材料中粗细混杂,真伪难辨。
如何去粗存细,鉴别真伪,是刑事诉讼过程中的一个重要问题。
客观上讲,这些材料在未查证前仅仅是一堆松散的、不完整的甚至充满各种矛盾的原始材料,它们所展现的案件轮廓可能十分模糊,甚至发生扭曲,这就要求办案人员对原始材料的真实性进行确认,逐步排除相互间的矛盾。
第九章 证据制度一般理论

洪某故意杀人案
某日,在一河边发现一具女尸,经辨认为某厂工人梁某, 死亡原因为农药中毒,且梁某有4个月身孕。经侦查收集到如 下证据材料:1.同厂多名工人证实梁某与该厂副厂长洪某关系 暧昧。2. 洪妻说:她知道其丈夫与梁某的关系,而且最近听洪 某多次对她说梁某多次逼他离婚,要想办法解决。3. 梁某的母 亲证实:梁某亲口对她说怀了洪某的孩子。4.洪某供认梁某是 自己所杀。但该案在法院审理时洪某翻供,说梁某要挟他如果 不离婚就死给他看,结果当洪某赶到出租屋时,梁某已经喝下 农药死了,洪某为了不连累自己,就移尸到河边。 【问题】
2.4月24日下午,田小法穿猪皮凉鞋离家,在该市汽车站 下车,到第2天上午9点回到哨吟乡五星村家中。 3.田于24日晚上12点投宿在该市前进招待所。进所后曾用 水冲洗一段时间后才就寝,早上6点钟离开招待所。 4.田于4月24日晚,留在住宿登记簿上的笔迹与电报稿上的 笔迹,经鉴定,完全相同。 5.徐明根在死亡前是跟田小法一起去常乐镇的。 6.徐明根带有宝石花手表一块,限额支票两张,票面为5干 元和9干元。在田小法裤袋里搜出宝石花手表一块,在其拎包 内搜到面额为5干元和9千元的限额支票面张。 7.尸体检验报告。
二、证据的本质特征
(一)证据的客观性:证据事实必须是伴随着案件 的发生、发展的过程而遗留下来的、不以人们的主 观意志为转移而存在的事实。 (二)证据的关联性:指证据必须同案件事实存在 某种联系,并因此对证明案情有实际意义。 (三)证据的合法性,也叫证据的许可性:收集、 运用证据的主体要合法,每个证据来源的程序要合 法,证据必须具有合法形式,证据必须经法定程序 查证属实。
8.死者徐明根的血为B型,田小法之血为A型,凶器榔头及 旧鞋上的血斑为人血,B型,镐头上的毛发为人发,血型为B型。 9.查获了作案后洗过的衣裤和凉鞋。
证据总结

一.证据法学的概念:P1是专门研究诉讼法律中有关证据的规定和诉讼过程中运用证据实践的学科。
二.证据法学的学科特点:是专门研究诉讼证明问题的具有高度专门性和高度应用性的法学学科。
三.证据法学的研究对象:1.与证据和证据运用有关的法律规范 2.与证据和证据运用有关的司法实践 3.诉讼证明的方法、规律、规则 4有关证据法和证据法学交叉或边缘问题。
四.神示证据制度:P16是证据制度发展史上最原始的一种证据制度,即它是凭借神的各种启示来判断案件是非曲直的一种证据制度。
神示证据制度的基础是人们对神灵的信仰和崇拜。
五.神示证据制度的证明方法:P17(一)对神宣誓,是最常用的一种方法,即控告人、被告人以及证人都要对神盟誓以证明自己的陈述是真实的。
(二)水审,是通过一定的方式使当事人接受水的考验,显示神意,并以此判定当事人对案情的陈述是否真实,或者被控人是否有罪。
水审又分为冷水审和沸水审两种方式。
(1)冷水审是将原、被告双方当事人或被告人一方投入河水,看其是否沉没,以检验其陈述的真伪及是否有罪。
(2)沸水审是指令受审人用手从沸水油锅中取出放置水底的某种物品,然后包扎好其烫伤手臂,同时向神祈祷。
经过一段时间后再根据其烫伤是否愈合来判定其陈述是否真实或有罪。
(三)火审,是让被告人接受火或烧红的铁器的考验,显示神意,借以判定当事人的陈述是否真实或被控人是否有罪。
(四)决斗,是以当事人在决斗的胜败作为判断是非的标准,凡是在决斗中获胜的一方,便认为是神使得他取胜,因而他是陈述是真实的,或者他本人是无罪的;如果一方不敢决斗或者决斗中失败,则认定他败诉,或者他是有罪的。
六.神示制度的评价:P19神示证据制度是以宗教信仰为其思想基础,法律把审查判断证据的权力,不是赋予法官,而是赋予神灵,因此,它所采用的各种证明方法都是唯心主义的,当然难以查明案情的真相,对案件做出正确的结论。
但是,神示证据制度的产生不是偶然的,而是与当时的历史条件相适应的。
证据理论概述

证据理论概述一、理论的提出1967年,Dempster提出上概率和下概率。
1976年,Shafer进一步完善,建立了命题和集合之间的一一对应关系,把命题的不确定问题转化为集合的不确定问题,满足比概率论弱的情况,形成了一套关于证据推理的数学理论。
证据理论是一种不确定的推理方法,与之类似的还有云模型、模糊理论、Bayes方法。
证据理论可以看作是根据证据做出决策的理论。
一个证据会在对应问题的决策解集合(决策框架)上产生一个基本信任分配(信任函数),该信任分配就是要决策的结果。
多个证据产生多个基本信任分配,再求出多个信任分配的正交和,即证据合成,最终得到一个决策结果。
该决策结果综合了多个专家的经验和知识。
然而,证据理论中,要求参与合成的证据相互独立,这在实际应用时很难做到。
一旦证据发生冲突,往往会得出与事实相悖的结果。
所以,证据理论中,冲突证据的合成仍是一个亟待解决的问题。
二、基本理论证据理论中,决策框架、信任函数、证据合成是关键。
决策框架Θ,是指命题的所有可能的答案组成的完备集合,集合中的所有元素都是两两互斥的,任一时刻,答案只能取集合中的某一元素。
基本信任分配函数m,是一个从Θ的幂集2Θ到[0,1]的映射,其中Θ的任一子集A满足m(Ф)=0, Σm(A)=1,表示证据对A的信任程度。
A=θi,m(A)表示对相应命题A的精确信任度;A=Θ,m(A)是对Θ的各个子集进行信任分配后剩下的部分,表示不知道该如何对它进行分配。
A≠Θ,A≠θi,m(A)是对相应命题A的精确信任度,但却不知道这部分信任具体该分给A中的哪些元素。
注:A∈B,m(A)与m(B)没有任何关系。
信任函数Bel,是一个从Θ的幂集2Θ到[0,1]的映射,其中Θ的任一子集A满足Bel(A)= Σm(B) (B ∈A),Bel(A)称为A的信任函数,表示证据对A为真的信任程度。
信任函数Bel满足1()ABel AA=Θ⎧=⎨≠Θ⎩(空信任函数),才能用D-S证据合成规则。
第九章 证据理论

第九章证据理论第一节证据概述一、刑事诉讼中的证据概念:证明案件情况的一切事实。
证据与证据资料之别。
二、诉讼证据与一般证据的区别1.诉讼证据会导致相应法律后果;2.诉讼证据要受法律约束;3.诉讼证据都是已发生、收集、事实;4.诉讼证据要受诉讼期限的限制三、证据的特征:(一)客观性:作为案件证据的客观物质痕迹和主观知觉痕迹,都是案件事实的客观反映。
(二)关联性:证据必须与案件事实有实质性联系。
关联性也须是客观存在的。
要求把两种情况排除在刑事证据体系之外:一是类似行为;二是品格。
英美证据法中的“关联性规则”。
(三)证据的法律性(合法性或许可性)法律性同客观性的关系:法律性保障客观性。
第二节刑事证据的种类第一类物证、书证一、物证概念:指以其外部特征、存在场所和物质属性证明案件事实的一切物品和痕迹。
物证的收集:1、通过勘察现场收集。
2、通过搜查。
3、通过向有关人、单位调查。
4、通过询问、讯问了解物证处所。
二、书证:指用文字、符号、图画等所表达的思想内容来证明案件事实的书面材料。
收集、判断;与物证的区别。
第二类证人证言一、概念:证人将自己知道的有关案件的事实情况所做的陈述。
证人应说清所知道案情的来源。
二、特点:是对案件情况的客观阐述;受主观、客观的影响。
三、证人资格问题1.凡知道案件情况,有作证能力的人,都可作为证人;2.生理上、精神上有缺陷或年幼,不能辨别是非、不能正确表达的人,不能作证人;3.是当事人以外的人;4.证人具有优先地位;5.证人只能是自然人;6.“见证人”不是证人。
我国证人作证制度“怪现状”:1.证人向警察、检察官作证却不向法庭作证;2.书面证言普遍使用。
证言笔录真实性无保障;3.警察不作证。
质证时往往只有警察能说清证据取得情况。
问题:1.同案人能否互为证人?2.辩护人是否可以作为本案证人?四、证人的权利、义务观点:1.明确规定证人的出庭作证义务和处罚措施;2.增加证人拒绝作证权的规定。
如被告人近亲属;特殊职业人员,律师、神职人员、医生护士等从事特定职业时获得的客户秘密;公务人员等。
证据法知识点总结

证据法知识点总结一、证据的种类和分类根据《中华人民共和国民事诉讼法》(以下简称《民诉法》)的规定,证据包括书证、证人证言、当事人陈述、鉴定意见、勘验笔录、现场照片、录像、音像资料等。
这些证据可以分为直接证据和间接证据。
直接证据是指能够直接证明事实的证据,间接证据是指不能直接证明事实的,需要通过推理和推断来确定的证据。
另外,在刑事诉讼中,还存在“特别规定的证据”,比如刑事案件中的DNA检验、指纹鉴定等。
二、证据的收集和保全证据的收集和保全是司法实践中的第一道工作。
证据可以通过调查、询问、鉴定、勘验、检验等方式来收集。
在收集证据的过程中,需要确保其真实性、完整性和合法性,同时需要保护证据的保密和安全。
对于书证,可以通过公证、交换、保全等方式来保全。
对于物证、证人证言等,需要保持其原状,避免损坏或丢失。
三、证据的审查和采纳证据在案件审理过程中需要经过审查和采纳。
法院通过对证据的审查,确定其真实性、合法性和充分性。
只有经过审查并符合法定条件的证据才能被采纳。
在采纳证据时,法院还应当对其证明力进行评价,判断其对事实的证明效力。
在一般情况下,直接证据的证明效力较高,而间接证据的证明效力较低,需要通过其他证据来印证。
四、证据的排除证据的排除是指对不符合法定条件的证据进行排除,从而保障裁判的公正和公平。
根据《民诉法》的规定,以下证据可以被排除:违反程序规定获得的证据、不能证明所陈述的事实的证据、证明的事实与案件无关的证据、可能误导法庭的证据等。
此外,在刑事案件中,非法取得的证据也应当被排除。
五、举证责任在民事诉讼中,原告对自己主张的事实负有举证责任,即原告应当提供所诉事实的证据。
被告对反驳原告主张的事实也负有举证责任。
如果当事人未能履行举证责任,法院将根据事实的推定原则来解决。
在刑事案件中,被告有权拒绝作证,但需要负担反驳公诉机关的指控的举证责任。
六、证据权和证据制度证据权是指当事人依法获得证据的权利,包括获取证据、参与证据的收集、审查和采纳等。
证据理论

m( A) m1( B)m2(C )
B C A
称为m1和m2正交和,即为m=m1m2.
组合后的m (A)满足: m( A) 1
A
19
6.5 证据理论
例 识别框架Ω ={a,b,c},基于两组不同证据得到的基本概率 分配函数为:
m1({a})=0.4
m1({a,c})=0.4 m1({a,b,c})=0.2
6.5 证据理论
A(0,0.85):由于Bel(A)=0,说明对A为真不信任;
另外,由于Bel(¬A)=1-Pl(A)=1-0.85=0.15,所以A
(0,0.85 )表示对A为假有一定的信任,信任度为0.15。 从上面的讨论中可以看出, Bel(A)表示对A为真的信
任度; Bel(¬A)表示对¬A,即A为假的信任度; Pl(A)
6.5 证据理论
例:识别框架Ω ={a,b,c},基于两组不同证据得到的基本概率 分配函数为: m1({a})=0.4 m1({a,c})=0.4 m2({a})=0.6 m2({a,b,c})=0.2
m1({a,b,c})=0.2
将m1和m2合并: m(Φ)
m2({b})=0.2
= m1({a}) m2({b})+ m1({a,c})m2({b}) =0.4×0.2+0.4×0.2 =0.16
M(A)=0.3:命题“x是红色”的信任度是0.3。
7
6.5 证据理论
例 设Ω={a,b,c},其基本概率分配函数为 m({a})=0.4, m({a,c})=0.4, m({b})=0, m({c})=0
m({a,b,c})=0.2, m({a,b})=0 m(Φ)=0, m({b,c})=0
DS证据理论分析

DS证据理论分析
证据权重表示一项证据对概率假设的支持程度,通常用一个介于0和1之间的数值表示。
当证据权重为1时,表示证据对概率假设的支持非常强,而当权重为0时,表示证据对概率假设没有任何支持。
信任函数则表示不同证据之间的组合方式,它是将证据权重映射到概率分配上的函数,通常采用的是Dempster-Shafer(DS)证据理论的规则。
DS证据理论的应用范围非常广泛,涵盖了多个领域。
例如,在法律领域,DS证据理论可以用于判断被告是否有罪,通过对不同证据的分析和组合,可以推断被告有罪的概率。
在医学诊断中,DS证据理论可以用于评估患者是否患有其中一种疾病,通过对患者的不同症状和检测结果的分析和组合,可以推断患者患病的可能性。
DS证据理论的分析过程可以分为三个主要步骤:观察证据、计算证据权重和组合证据。
观察证据是指从现实生活中收集和获取各种证据。
计算证据权重是指通过数学公式或计算方法,将证据的权重从原始数据转化为DS证据权重。
组合证据是指将不同证据的权重进行组合,得出最终的概率假设。
总结来说,DS证据理论是一种通过考虑证据权重和信任函数来推断概率假设真实度的方法。
该理论的应用广泛,可以用于法律、医学等多个领域。
在应用该理论进行分析时,需要考虑证据的可靠性和不确定性,以及对证据的观察、计算权重和组合证据三个主要步骤的操作。
循证 证据总结

循证证据总结
循证实践(Evidence-Based Practice)是一种基于最佳证据的临床决策方法,其核心思想是利用最可靠的证据来制定临床决策,以提高医疗质量和患者的治疗效果。
在循证实践中,证据总结是一个重要的步骤。
证据总结是对大量证据进行综合、分析和评价的过程,目的是提取出最有价值的证据,为临床决策提供支持。
证据总结的过程包括以下几个步骤:
1. 确定研究问题:根据临床实践的需要,确定需要解决的研究问题,如某种疾病的治疗方法、诊断标准等。
2. 检索相关证据:通过各种途径(如数据库、学术会议、临床试验等)检索相关的研究证据,包括随机对照试验、观察性研究、案例报告等。
3. 筛选证据:根据研究问题的具体要求,筛选出与问题相关的、高质量的证据。
4. 提取证据:从筛选出的证据中提取出与问题相关的数据和信息,如样本量、研究方法、结果等。
5. 综合分析:对提取出的数据进行综合分析,比较不同研究结果之间的异同点,得出最佳证据。
6. 制定决策:根据最佳证据制定临床决策,以提高患者的治疗效果和医疗质量。
在证据总结的过程中,需要注意以下几点:
1. 确保证据的质量:选择高质量的研究证据,避免低质量的研究结果对决策的影响。
2. 充分考虑不同研究结果的异同点:不同研究结果可能存在差异,需要进行综合分析,提取出最佳证据。
3. 遵循伦理原则:在证据总结过程中,需要遵循伦理原则,保护患者的隐私和权益。
4. 及时更新证据:随着研究的进展,新的证据可能会出现,需要及时更新证据总结,以确保临床决策的准确性。
DS证据理论_学习笔记

DS证据理论_学习笔记D-S证据理论_学习笔记注意,笔者⽔平⼀般,主要内容来源于参考资料,如有错误请多多指教。
不定期更新。
由来D-S证据理论全称“Dempster-Shafer证据理论”,源于美国哈佛⼤学数学家A. P. Dempster在利⽤上、下限概率来解决多值映射问题⽅⾯的研究⼯作。
后来他的学⽣G. Shafer引⼊信任函数的概念,形成了⼀套基于“证据”和“组合”来处理不确定性推理问题的数学⽅法。
1976年出版的《证据的数学理论》(A Mathematical Theory of Evidence)标志着证据理论正式成为了⼀种处理不确定性问题的完整理论。
证据理论的核⼼是Dempster在研究统计问题提出的、随后被Shafer推⼴的Dempster合成规则。
证据理论的优点是:1. 在证据理论中需要的的先验数据容易获得。
2. Dempster合成公式可以综合不同专家或数据源的知识或数据,⽤途⼴泛。
证据理论的缺点是:1. 要求证据必须是独⽴的,有时这不易满⾜。
2. 证据合成规则没有⾮常坚固的理论⽀持,其合理性和有效性还存在较⼤的争议。
3. 计算上存在着潜在的指数爆炸问题。
质疑证据合成规则合理性的问题之⼀:“Zadeh悖论”,详见参考资料。
为此有很多完善D-S证据理论的⼯作,感兴趣的请⾃⾏查找相关资料。
基本概念和推理过程⼊门理解D-S证据理论可以看这篇⽂章,对照着参考资料看就能有个⼤概的理解了。
这⾥仅仅是摘录基本概念和合成规则,以及个⼈理解,详细过程不再赘述。
基本概念基本概念有4基本概率分配英⽂全称:Basic Probability Assignment,简称BPA。
在假设空间上,使⽤⼀个叫做mass函数的函数率。
明显,对于同⼀个mass函数⽽⾔,假设空间中每个元素的概率之和等于1。
也即满⾜:(Focal elements)。
我感觉,⼀般不同的专家或者证⼈就会有不同的看法,也即有不同函数信任函数Belief function BPA m的信任函数定义为:似然函数Plausibility function BPA m的似然函数定义为:信任区间信任区间⽤于表⽰对某个假设的确认程度,⽐如假设A我简单理解为A的嫌疑⾄少是其⼦集的概率之和,⾄多是其涉及集合的概率之和。
证据理论_万静静

Wuhan University of Technology
2、信任函数
定义2 命题的信任函数Bel 对于任意假设而言,其信任度Bel(A)定义为 A 中全部子集 对应的基本概率之和,即
Bel : 2 [0, 1] Bel( A)
B A
M ( B),
A
Bel函数也称为下限函数,表示对 A 的全部信任。由概率分配 函数的定义容易得到 Bel() M () 0
8
Wuhan University of Technology
证据的不确定性
设Ω为变量x的所有可能取值的有限集 合 (亦称样本空间),且Ω中的每个元素都相 互独立,则由Ω的所有子集构成的集合称为 幂集,记为2Ω 。
当Ω中的元素个数为N时,则其幂集的 元素个数为2N,且其中的每一个元素A都对 应于一个关于x的命题,称该命题为“x的值 在A中”。
2014-11-25 13
Wuhan University of Technology
例如
以Ω={红,黄,蓝}为例说明。
当A={红}时,由于m(A)=0.3,它表示对命 题 “x是红色”的精确信任度为0.3。
当A={红,黄}时,由于m(A)=0.2,它表示对命 题“x或者是红色,或者是黄色”的精确信任度为 0.2,却不知道该把这0.2分给{红}还是分给{黄}。 当A=Ω={红,黄,蓝}时,由于m(A)=0.2,表 示不知道该对这0.2如何分配,但它不属于{红},就 一定属于{黄}或{蓝},只是基于现有的知识,还不知 道该如何分配而已。
9
Wuhan University of Technology
证据的不确定性 如,用x代表所看到的颜色, Ω={红,黄,蓝}, 则A={红}表示“x是红色”; 若A={红,蓝},则表示“x或者是 红色,或者是蓝色”。
数据分析知识:数据分析中的证据理论方法

数据分析知识:数据分析中的证据理论方法(注:本文字由人工智能生成,可能存在语言表达不准确、语义重复等问题,请读者结合实际情况阅读。
)数据分析中的证据理论方法,是指使用统计学、数学等方法,对数据进行系统分析、归纳、推理,从而得出结论、预测或决策的一种方法。
在数据分析领域,证据理论方法被广泛应用于预测、风险评估、决策支持等方面,成为了数据分析的基础和核心。
证据理论是一种统计学方法,它主要是精算学领域提出的一种方法,旨在处理自然风险、金融风险、医疗保险、财务风险等不确定性问题。
证据理论的基本思想是将基于不同证据得出的概率进行合并,并计算一个综合的证据概率,以此来确定一个事件的发生概率。
它包括证据合并和证据分割两个步骤,其中证据合并是将多个证据的概率进行综合计算获得较为准确的概率值,而证据分割则是根据不同证据的权重和贡献度,确定每个证据的具体概率值。
在数据分析中,证据理论方法被广泛应用在数据融合和特征选择中。
在数据融合中,证据理论可以将多个不同来源的数据集合并,实现数据集成和统一分析。
如结合企业内部部门的人员数据与市场调研数据,来获得更加全面和准确的市场分析结果。
在特征选择中,证据理论可以筛选出对结果具有较大贡献的因素,并作为模型的输入变量,提高模型的准确率和可解释性。
除此之外,证据理论方法还被应用在风险评估和决策支持中。
在风险评估中,证据理论可以对不同的风险因素进行加权处理,获得综合的风险评估结果。
如在政策制定中,通过对不同因素的风险评估,制定出合理科学的政策方案。
在决策支持中,证据理论可以根据不同证据的权重和贡献度,为决策者提供合理建议和决策支持。
如在股票市场中,通过证据理论方法对经济因素、行业趋势、政策环境等多个因素进行综合评估和分析,给出股票投资的建议。
然而,证据理论方法在应用中也存在一些局限,例如对结果的解释性较弱,其模型的假设和参数选择也需要一定的技术支持。
因此,专业技能和经验的能力成为了应用证据理论方法的关键。
法律证据总结报告范文(3篇)
第1篇一、报告概述随着法治社会的不断发展,法律证据在司法实践中的重要性日益凸显。
证据是查明案件事实、维护司法公正的基础。
本报告旨在对法律证据的基本概念、种类、收集与运用等方面进行总结,以期提高法律工作者对证据的认识和应用能力。
二、法律证据的基本概念1. 定义:法律证据是指在法律诉讼中,用以证明案件事实的材料。
它包括物证、书证、证人证言、当事人陈述、鉴定意见、勘验笔录等。
2. 特征:法律证据具有客观性、关联性和合法性。
- 客观性:证据必须真实存在,不能凭空捏造。
- 关联性:证据必须与案件事实有直接或间接的联系。
- 合法性:证据的收集、保管和使用必须符合法律规定。
三、法律证据的种类1. 物证:指能够证明案件事实的物品或痕迹,如指纹、DNA、痕迹物等。
2. 书证:指能够证明案件事实的书面文件,如合同、信件、票据等。
3. 证人证言:指证人就其所了解的案件事实所作的陈述。
4. 当事人陈述:指当事人就案件事实所作的陈述。
5. 鉴定意见:指鉴定人根据专业知识对案件事实所作的判断。
6. 勘验笔录:指勘验人员对现场或物品进行勘验后所作的记录。
四、法律证据的收集1. 依法收集:证据的收集必须符合法律规定,不得侵犯公民的合法权益。
2. 全面收集:对与案件有关的所有证据都要进行全面收集,不得遗漏。
3. 客观收集:收集证据时,要保持客观、公正的态度,不得主观臆断。
4. 及时收集:证据容易灭失或伪造,应尽快收集。
五、法律证据的运用1. 审查证据:对收集到的证据进行审查,判断其是否合法、真实、充分。
2. 证据认定:对审查后的证据进行认定,确定其证明力。
3. 证据链:将多个证据相互印证,形成完整的证据链,以证明案件事实。
4. 排除非法证据:对非法收集的证据予以排除,不得作为定案的依据。
六、案例分析以下是一起典型案例,用于说明法律证据在司法实践中的应用:案例:甲与乙因合同纠纷诉至法院。
甲主张乙违约,要求乙支付违约金。
乙辩称自己并未违约,请求法院驳回甲的诉讼请求。
证据理论实验总结范文

实验目的:验证证据理论在交通事故责任判定中的可行性和有效性,为交通事故责任判定提供一种新的理论依据和方法。
实验时间:2023年10月至2023年12月实验地点:某市交通事故处理中心实验人员:5名交通事故处理专家、5名交通事故处理员、5名大学生志愿者实验方法:1. 实验设计:采用随机分组法,将实验对象分为实验组和对照组。
实验组采用证据理论进行交通事故责任判定,对照组采用传统的责任判定方法。
2. 数据收集:收集50起交通事故案例,包括事故现场照片、现场勘查报告、当事人陈述、证人证言等。
3. 实验实施:实验组根据证据理论,对事故责任进行判定;对照组根据传统方法,对事故责任进行判定。
4. 数据分析:采用SPSS软件对实验数据进行分析,比较实验组和对照组的事故责任判定结果。
实验结果:1. 实验组在50起交通事故案例中,共判定事故责任51次,其中双方责任20次,一方责任31次。
2. 对照组在50起交通事故案例中,共判定事故责任51次,其中双方责任18次,一方责任33次。
3. 实验组的事故责任判定准确率为92%,对照组的事故责任判定准确率为88%。
4. 实验组的事故责任判定耗时平均为30分钟,对照组的事故责任判定耗时平均为45分钟。
实验总结:1. 证据理论在交通事故责任判定中具有可行性。
实验结果表明,证据理论在实际应用中能够有效提高事故责任判定的准确率。
2. 证据理论在交通事故责任判定中具有有效性。
与传统方法相比,证据理论能够更客观、公正地判定事故责任。
3. 证据理论在交通事故责任判定中具有效率性。
实验结果表明,采用证据理论进行事故责任判定,可以缩短判定时间,提高工作效率。
4. 证据理论在交通事故责任判定中具有适用性。
实验结果表明,证据理论适用于各种类型的交通事故,具有较高的适用范围。
5. 证据理论在交通事故责任判定中具有一定的局限性。
在实际应用中,证据理论需要结合现场勘查、当事人陈述、证人证言等多方面信息,才能作出准确的判定。
证据理论读后感

研1409 范小将2014020265 基于证据理论的不完全信息多属性决策方法的论文读后感全文通过几个方面进行对实际中获取的信息存在的不足进行分析。
第一:提出一种不完全信息多属性决策的证据推理方法;
第二:针对具有层次结构的不完全信息多属性决策问题展开研究,提出了一种不完全信息多属性决策的DS-AHP方法;
第三:基于证据理论的群决策过程进行分析;
第四:针对不完全信息下决策属性有定性和定量两类指标构成的混合型多属性群决策问题展开研究,提出一种不完全信息的混合型多属性群决策方法;
第五:提出一种不完全信息的群体语言多属性决策方法。
在实际的决策中,由于信息大多数具有不精确、不完备、模糊等性质,加上决策者由于对问题认识的局限性或自身知识的缺乏等原因,决策者给出的决策举证往往是不完全的,即决策矩阵中存在空缺,这对于决策存在难度,而这篇论文首先描述了证据理论的基本概念,然后对现有的基于证据结构的决策规则存在不足进行分析,最后,综合考虑在信息处理中存在的问题,一步一步进行分析,进一步总结得出一些处理此类问题的方法,进而一步一步完善不完全信息的决策方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录
• 一、证据理论 基本内 容 • 二、基于证据理论的 不完全信息多属性决 策方法论文的感想 • 三、新无量刚指标的 概念 • 四、故障诊断常用的 方法 • 五、K-NN算法
证据理论
证据理论是由德普斯特(A.P.Dempster) 首先提出,并由沙佛(G.Shafer)进一步 发展起来的一种处理不确定性的理论,因 此又称为D-S理论。 • 适用领域:信息融合、专家系统、情报分 析、法律案件分析、多属性决策分析,等 等
Kv
z
z 4 p( z )dz
2
p( z )dz
2
E( z ) E ( z )
2 2
4
故障诊断的方法
• 故障诊断的概念 利用各种检查和测试方法,发现系统 和设备是否存在故障的过程是故障检测; 而进一步确定故障所在大致部位的过程是 故障定位。故障检测和故障定位同属网络 生存性范畴。要求把故障定位到实施修理 时可更换的产品层次(可更换单位)的过 程成为故障隔离。故障诊断就是指故障检 测和故障隔离的过程。
新无量纲指标
• 引言:
• 随着现代科学技术的飞速发展, 旋转机械设备的组成和 结构越来越复杂, 对于设备运行的安全性、 维修性和可 靠性的要求也越来越高。一旦机组发生故障, 往往导致 停产甚至机毁人亡的灾难性后果。因此,机械的故障诊断 技术特别是对大型设备如汽轮机、 压缩机等的故障诊断 就显得尤为重要。近些年来, 故障诊断技术已经取得了 一些发展 , 但大多数是对于单一故障的诊断。而机器产 生故障的原因一般不是单一的因素, 尤其是对于旋转机 械故障, 往往是多种故障因素综合所产生的多重并发故 障。目前对于并发故障的诊断技术还并不成熟, 本文将 对前人的研究结果进行分析总结, 并着重阐述采用无量 纲指标进行旋转机械并发故障诊断的方法。
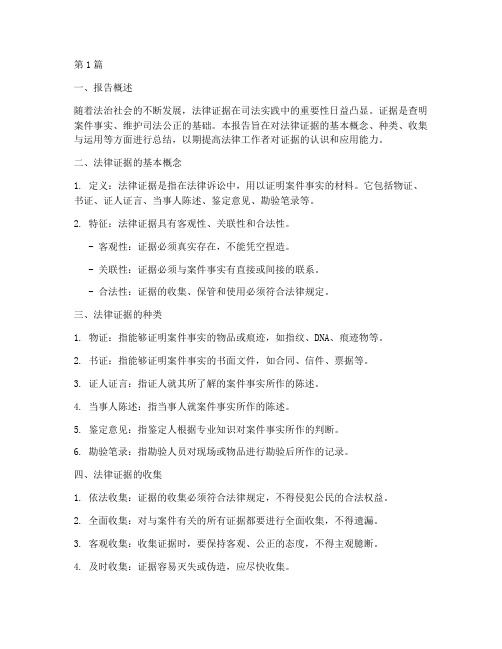
Pl(A) 拒绝证据区间 拟信区间
支持证据区间
• 信任度是对假设信任程度的下限估计—悲 观估计; • 似然度是对假设信任程度的上限估计—乐 观估计。
• 下面用例子进一步说明下限与上限的意义:
• A(0.25,1):由于Bel(A)=0.25,说明对A为真有一 定程度的信任,信任度为0.25;另外,由于Bel(¬A)= 1-Pl(A)=0,说明对¬A不信任。所以A(0.25,1) 表示对A为真有0.25的信任度。 • A(0,0.85):由于Bel(A)=0,而Bel(¬A)=1一 Pl(A)=1-0.85=0.15,所以A(0,0.85)表示对A为 假有一定程度的信任,信任度为0.15。 • A(0.25,0.85):由于Bel(A)=0.25,说明对A为真 有0.25的信任度;由于Bel(¬A)=1-0.85=0.15,说 明对A为假有0.15的信任度。所以A(0.25,0.85)表示对 A为真的信任度比对A为假的信任度稍高一些
• 5)故障辨识能力:是指诊断系统辨识故障大小和 时变特性的能力。故障辨识能力越高说明诊断系 统对故障的辨识越准确,也就越有利于对故障的 评价和维修。 6)鲁棒性:是指诊断系统在存在噪声、干扰 等的情况下正确完成故障诊断任务,同时保持低 误报率和漏报率的能力。鲁棒性越强,说明诊断 系统的可靠性越高。 7)自适应能力:是指故障诊断系统对于变化 的被测对象具有自适应能力,并且能够充分利用 变化产生的新信息来改善自身。 以上性能指标在实际应用中,需要根据实际 条件来分析判断哪些性能是主要的,哪些是次要 的,然后对诊断方法进行分析,经过适当的取舍 后得出最终的诊断方案。
B⊆D
似然函数
定义3: 似然函数Pl:2D→[0,1],且 Pl(A)=1一Bel(¬A) 其中A⊆D 似然函数的含义:由于Bel(A)表示对A 为真的信任程度,所以Bel(¬A)就表示对非 A为真,即A为假的信任程度,由此可推出 Pl(A)表示对A为非假的信任程度。 似然函数又称为不可驳斥函数或上限函数。
概率分配函数的正交和
• 定义4 :设M1和M2是两个概率分配函数,则其正 交和M= M1 ⊕M2为 • M(Φ)=0 • M(A)=K-1×∑M1(x)×M2(y) • • 其中: • K=1-∑M1(x)×M2(y)=∑M1(x)×M2(y)
x∩y=A
•
x∩y=Φ
x∩y≠Φ
• 如果K≠0,则正交和M也是一个概率分配函数;如 果K=0,则不存在正交和M,称M1 与M2矛盾。
三、故障诊断的性能指标
• 评价一个故障诊断系统的性能指标有: 1)故障检测的及时性:是指系统在发生故障后,故 障诊断系统在最短时间内检测到故障的能力。故障发生到 被检测出的时间越短说明故障检测的及时性越好。 2)早期检测的灵敏度:是指故障诊断系统对微小故 障信号的检测能力。故障诊断系统能检测到的故障信号越 小说明其早期检测的灵敏度越高。 3)故障的误报率和漏报率:误报指系统没有出去故 障却被错误检测出发生故障;漏报是指系统发生故障却没 有被检测出来。一个可靠的故障诊断系统应尽可能使误报 率和漏报率最小化。 4)故障分离能力:是指诊断系统对不同故障的区别 能力。故障分离能力越强说明诊断系统对不同故障的区别 能力越强,对故障的定位就越准确。
D-S证据理论的优势和局限性
• 优势: 满足比Bayes概率理论更弱的条件,即不需要知道先验概率,具 有直接表达“不确定”和“不知道”的能力。 • 局限性: 要求证据必须是独立的,而这有时不易满足;证据合成规则没有 非常坚固的理论支持,其合理性和有效性还存在较大的争议;计算上
存在着潜在的组合爆炸问题。
概率分配函数不是概率
3.
信任函数
定义2 :命题的信任函数Bel:2D→[0,1],且 Bel(A)=ΣM(B)对所有的A⊆D
B⊆A
其中2D表示D的所有子集。 Bel函数又称为下限函数,Bel(A)表示对命 题A为真的信任程度。 由信任函数及概率分配函数的定义推出: Bel(Φ)=M(Φ)=0 Bel(D)=ΣM(B)=1
信任函数与似然函数的关系
• Pl(A)≥Bel(A)
证明: ∵ Bel(A)十Bel(¬A)>>=1 ∴Pl(A)-Bel(A)=1-Bel(¬A)一Bel(A) =1-(Bel(¬A)+Bel(A)) ≥0 ∴ Pl(A)≥Bel(A)
对偶(Bel(A) ,Pl(A))称为信任空间
Hale Waihona Puke 信任区间0Bel(A)
• K=1-∑M1(x)×M2(y)=0.61 • x∩y=Φ • M({黑})=K-1×∑M1(x)×M2(y)=0.54 •
x∩y={黑}
• 同理可得 M({白})=0.43, M({黑,白})=0.03 • 所以,组合后的概率分配函数为
M({黑},{白},{黑,白},Φ)=(0.54,0.43,0.03,0)
2.
概率分配函数的作用是把D的任意一个子集A都映射为 [0,1]上的一个数M(A)。当A⊂D时,M(A)表 示对相应命题的精确信任度。实际上就是对D的各个子 集进行信任分配,M(A)表示分配给A的那一部分。当 A由多个元素组成时,M(A)不包括对A的子集的精确信 任度,而且也不知道该对它如何进行分配。当A=D时, M(A)是对D的各子集进行信任分配后剩下的部分,它 表示不知道该对这部分如何进行分配。 定义:若A⊆D则M(A)≠0,称A为M的一个焦元。
l l z l p ( z )dz lim E ( z ) l I f lim l E( z ) z p( z )dz
1/ l
l l z p( z )dz lim E ( z ) l CL f lim 2 2 l 1/2 z p( z )dz E ( z ) l
所谓的bayes概率是由贝叶斯理论所提供的一种对概率的解释,它采用 将概率定义为某人对一个命题信任的程度的概念。
一、D-S基本理论
设D是变量x所有可能取值的集合,且D中的 元素是互斥的,在任一时刻x都取且只能取 D中的某一个元素为值,则称D为x的样本空 间,也称D为辨别框 。在证据理论中,D的 任何一个子集A都对应于一个关于x的命题, 称该命题为“x的值在A中”。 引入三个函数:概率分配函数,信任函数 及似然函数等概念。
基于证据理论的不完全信息多属性 决策方法的论文的感想
• 在实际的决策中,由于信息大多数具有不精确、 不完备、模糊等性质,加上决策者由于对问题认 识的局限性或自身知识的缺乏等原因,决策者给 出的决策矩阵往往是不完全的,即决策矩阵中存 在空缺,这对于决策存在难度,而这篇论文,文 章首先描述了证据理论的基本概念;然后对现有 的基于证据结构的决策规则存在不足进行分析; 最后综合考虑在信息处理中存在的问题一步一步 进行分析,进一步总结得出一些处理此类问题的 方法,一步一步完善不完全信息的决策方法
• 所谓无量纲是指对于某一量, 当他们所有的量纲 指数都为零时, 其便成为无量纲量, 即量纲为 1 。由此可知, 无量纲量是由两个具有相同量纲 的物理量的比值组成, 当用它来描述某一特定体 系时, 其具有一定物理意义。 • 无量纲诊断是一种将无量纲参数用于设备故障诊 断的技术方法, 与有量纲幅域诊断参数( 如方根 幅值、 平均幅值、 歪度和峭度等) 不同, 无量纲 幅域诊断参数对故障足够敏感, 而对信号的幅值 和频率的变化不敏感, 即和机器的工作条件关系 不大。 • 无量纲指标定义如下:
• 全文通过几个方面进行对实际中获取的信息存在 的不足进行分析。 • 第一提出一种不完全信息多属性决策的证据推理 方法。 • 第二具有层次结构的不完全信息多属性决策闯题 展开研究,提出了一种不完全信息多属性决策的 DS-AHP方法。 • 第三对基于证据理论的群决策过程进行分析。 • 第四不完全信息下决策属性由定性和定量两类指 标构成的混合型多属性群决策问题展开研究,提 出一种不完全信息的混合型多属性群决策方法。 • 第五出一种不完全信息的群体语言多属性决策方 法。