井下陀螺定向、7″级控制导线布设方案研究与应用
刘园子煤矿
刘园子煤矿井下测量高级控制点布设方案关于刘园子煤矿井下测量高级控制点布设方案刘园子煤矿位于甘肃省西部,地处沙井子矿区东部,行政区划属甘肃省环县车道乡刘园子村,现隶属于大唐陇东能源有限公司,井田采用立井开拓方式。
一、刘园子煤矿井下测量高级控制点的现状矿区原坐标系平面采用1954年北京坐标系,高程均采用1956年黄海高程系。
经分析其成果是满足矿井前期规划设计及局部控制所需要,不能满足矿区施工放样规定长度投影≤2.5cm/km的要求与目前矿区工程项目规划、设计和施工的要求。
刘园子煤矿的井下导线系统是位于井底车场的陀螺定向边FJ01---FJ02为起算边向巷道逐步拓展形成的,等级为15秒级,以支导线的形式布设,但是由于井底车场经过装修,原有的导线起算边已不复存在,且井下的导线点设置存在不规范及导线点位移的现象。
综上所述,刘园子煤矿现有的井下导线系统已不能满足矿井安全生产及大型贯通测量的精度要求,需要建立一套高精度、完整的导线系统。
经公司及矿领导批准,刘园子煤矿井下测量高级控制点计划重新布设。
二、布设方案1、地面近井点的与井口水准点的布设近井点和井口水准基点是矿山测量的基准点。
在建立近井点和井口水准基点时应满足下列要求:①尽可能的埋设在便于观测、保存和不受开采影响的地点。
当近井点必须设置于井口附近的工业厂房顶时,应保证观测时不受机械震动的影响和便于向井口敷设导线。
②每个井口附近设置一个近井点和两个水准基点。
③近井点至井口的连测导线边线应不超过3个。
④多井口的近井点应统一合理布置,尽可能使相邻井口的近井点构成导线网中的一个边,或力求间隔的边数最少。
⑤为使近井点和井口水准点免受损坏,在点的周围设置保护桩和栅栏或刺网。
在标石上堆放高度不小于0.5m的碎石。
⑥在近井点及近井点的直接构成导线网边的点上,用角钢或废钻杆等材料建造永久站标。
⑦近井点的布设方案和要求必需按照《煤矿测量规程》的规定执行。
近井点可在矿区三、四等三角网、测边网或边角网的基础上,用插网、插点、敷设经纬仪(全站仪)导线GPS等方法测设。
陀螺测井技术的研究与应用
陀螺测井系统 由两大部分组成 :动力 调谐速率 陀螺测井 仪 ( 井下仪 ) 和地 面测井系统。动力调谐速率陀螺测井仪由惯性体 、 陀螺 电路 舱 、 电源舱 、 微机舱 、 磁定 位器 、 减震器 、 马龙头等几个 部分组成 。地面系统分便携式和车载式 , 二者 的功能完全相 同。
1陀 螺 测 井 技术 的提 出
高速旋转 , 并在 中途传感器组件发生对转 , 通过测量对转前后传
早期油 田开发过程 中,新井完钻后工程师们即按 预先设计 感器参数并对其加权平均 以消除测量误差 。 的井在油藏 中的位置来部署油藏开发的过程 。 但实践证明 , 由于 5实 际 应 用
4关 键 技 术 和创 新点
角) , 位移 1 5 4米 , 处于南部一条小屋脊 的低部位。通过侧钻靶点 调整后 , 在 南部 的小屋脊钻遇沙一 1 0 . 6米, 2 层油层 , 投产获 日产
4 0吨高产。同时河 4 6 一 斜 l 0屋脊东部经构造校正后 , 向东扩 大 含油面积 0 . 0 2 k r n , 增加优质储量 1 O万 吨 , 后设计 河 4 6 一 X 2 3 井 取得较好效果 。
摘 要: 陀螺测井是一种用于 已下套管的油水井重新测量其井身轨迹的先进技术。 这项技术以动力调谐速率 陀螺测量地球 自 转角速率分量 , 通过对井筒不同深度的测量, 即可得 出井身轨迹曲线。 可应用于有磁屏蔽的套管、 油管、 钻杆 内 和有磁干扰的丛式井组进行井眼轨迹测量以及定向钻井。 应用此项技术可进行复杂断块油藏及岩性 油藏中井点校正 , 分析油藏剩余油潜力和油水动态分布, 挖掘油藏潜力, 提高储量动用程度具有较好的效果。 关键词 : 陀螺测井 ; 动力调谐速率陀螺 ; 井身轨迹测井; 定向钻井; 技术应用
浅谈陀螺定向技术在井下两水平中的贯通应用
B =1 2 ×1 35 0~m
杜 绝了贯通事故。将陀螺定 向技 术在 井下两水平贯通测量 中进行应用推广具有十分积极的意义。
关键词 陀螺定 向 贯通 测量
中圈 分 类 号 T 15 5 D 7 . 文献标识码
南屯煤矿 一42 3 m水 平总 回风 巷位 于矿井 的西 北 侧, 是开采小 槽煤 的 总 回风 巷 , 主要用 途 是 通风 和 行 人 , 一30 是 5 m和 一4 2 两 个 不 同水 平 的巷 道 贯 通。 3m 设计工程量为 28 m, 85 贯通 环线长 5 0 m, 80 为直巷相 对 贯通 。巷 道允许偏差 在重要 方 向上 为 30 m, 0 r 在高 程 a 方 向上为 20 m 由于南 屯煤矿 投产 三十多年 , 有 0r 。 a 原 30 5 m陀螺边 和 基本 控 制 导线 点 已被 破坏 , 4 2 一 3m 既无陀螺边又无基本 控制导线 , 这样 给 一 3 m总回风 42
3 陀螺 定 向技术在 贯通 测 量 中的应用
应 用一 : 次 导线 测 量 使用 日本 尼康 D M 32 本 T _ 5 防爆 型全站仪进行 平面 控制测 量 , 用测 回法测量 水平 角。水 平角限差要求 : 同一 测 回中半测 回互 差 2 ”两 0、 侧回间互 差 1 ”两次对 中测 回间互差 3 2, 0 。距离 通过
平 一兀' 6两条 边 进行 陀 螺定 向, 采用 瑞 士生 产 的 GK A 1陀螺 经纬仪进行 , 用跟踪逆转 点法 , 41 ” 按 -5的精 度等级要求进行定 向观测 , 为确保 陀螺 定 向成 果 的可
f = 腰
× 工=± 0 ̄ .8 √ 5 / 8 5:± 5 m 2 8m
2 1 第3 0年 期 1
陀螺全站仪在井下导线测量中的应用
据 井上控 制点 的观测值 计算仪 器参数 , 而定位 井下导线 边 。对加 测 陀螺 边 的导线控 制 网进 行整 体 进 平差 及质量 评 定 , 分析 增加 不 同数 目的 陀螺边 对 导线测量 精度 的影 响。从 测量精度 和施 测成 本的 角
度 出 发 , 定 出符 合 矿 山 实 际 的 陀 螺 导 线 测 量 方 案 。 制
站仪 望远 镜照 准 目标 的测 线方 向。陀 螺寻 北 本体 利 用磁 悬浮 构成摆 式 的陀螺在 敏感 地 球 自转 角 速度 的
G T高精度 全 自动 陀螺定 向仪摒 弃 了传 统 吊带 A
技术模 式 , 于 磁 悬 浮 支撑 技 术 和现 代 系 统 控 制 理 基 论 , 立 了陀 螺 全 站 仪 系统 构 建 、 合 集 成 、 建 综 自动 化 测控 、 环境适 应 性 及 性 能评 测 为一 体 的 技 术 方 法体
同配合来 测定任 意测线 的陀螺 方位 角 。陀 螺 仪相 对
于惯性 空 问有 定 轴 性 的特性 , 地球 相 对 于 惯 性 空 而
间有 自转效 应 , 此在 地 球 表 面某 一 纬 度 处 的 陀 因 螺仪就 可 以测 量 出 相 对 于惯 性 空 间 的 自转 角 速 度 ∞, 然后将 地球 的 自转 角速 度分解 为水 平分 量 和垂 直 分量 , 中水 平 分 量 ∞ (CS 其 =. Oq , b沿地 球 经 线 指 向 真 O
陀螺仪在联系测量中的应用
陀螺仪在联系测量中的应用摘要:本文介绍了使用磁悬浮陀螺仪在某煤矿联系测量中的应用情况,阐述了陀螺仪定向在煤矿联系测量中的优势以及需要注意的事项。
关键词:陀螺仪全站仪联系测量方位角1 测量方案及仪器选择本次联系测量方案采用井筒中心单丝稳定投点,地面采用测距导线确定平面坐标,井下采用测距导线联测,并实施磁悬浮光电陀螺仪定向。
高程联系测量采用钢尺导入,使用多根经过鉴定50米钢尺。
按《煤矿测量规程》矿井联系测量技术要求进行。
仪器井上井下均用尼康DTM-352C防爆全站仪、GAT高精度磁悬浮陀螺全站仪和徕卡730水准仪,投点采用1.8mm钢丝进行,投点误差不大于20mm。
2 实测过程及数据2.1 地面连测矿区内已有WG7和WG6两个已知点,根据地面一级导线观测要求,图1是地面连测示意图,使用全站仪对角度和边长独立观测两次,计算钢丝(O点)坐标。
水平角观测同一测回中半测回互差分别为:-6″、+6″、0″,小于规定中的限差±20″;两测回之间的互差分别为:+8″、0″、-8″,小于规定中的限差±12″。
在距离测量中,单向两次测回较差不大于15mm,也符合规定。
最后计算出钢丝(O点)坐标为:X=3888070.001,Y=509679.921。
图1 地面连测示意图2.2 定向测量此次定向测量使用的GAT陀螺全站仪,标称定向精度为5″,因此要求同一边任意两测回测量陀螺方位角的互差,不得超过10″;对于超限数据应在现场予以补测。
根据测区的地理位置,在实测过程中输入的纬度值为:35.1,选取地面控制网中WG7→WG6两个控制点构成的测线进行仪器常数标定。
根据现场采集数据,井下定向边各测回陀螺精寻北数据和全站仪测量数据以及由此计算的井下各定向边的陀螺定向方位角如表1所示:根据测得的角度和边长,经推算,得到各点坐标,如表2:2.4 高程联测测量高程联测测量采用徕卡730水准仪和1.8mm钢丝进行,投点误差不大于20mm。
井下7"级导线及四等水准控制网的设计与实施
2 . 2 水 准 测 量
由于 该矿井 主副井 均为斜井 ,在高程导入过程 中可 以直接导入 高程 ,不 必 进行 联 系 测 量 , 所 以 ,高 程 控 制 网 的 布 设 过 程 中 ,直 接
【 关键词 】 井下测量 ;导线测量 ;水准测量 ;G P S ;陀螺定 向
前 言
高精度的矿 山三维控制 网是矿 山 日常生产 和灾害监测的重要保 障,关系到煤矿生产的每一个环节 。G P S 、高精度陀螺仪等技术 已经 在不同领域得到 了广泛 的应用 ,并取得 了较为理想的效果 。如何采 3 数 据 处 理 用现代测绘技术建立 高精度 的井下三维控制网 ,就成为矿 山测绘工 3 . 1导 线 网平 差 作 者 面 临 的 一 个 重 要 问题 。 在进 行平差计 算前 ,首先对所测数据记录进行检核 ,经检验无 九 煤 ”和 “四煤 ”的概 算 结 本文针对 主副斜 井开采矿井 ,提 出综合采用 G P S 、磁悬浮 陀螺 误 后 ,然 后 对 导 线 网 进 行 点 位 的 概 算 ,“ ,各导线 的技术 指标都满 足限差要求 。 仪 、水准仪 以及全站 仪,进行高精度矿 山三维控制 网的建立 ,并以 果见表 1 某矿 区具体 实测数据为例 ,系统介绍建立井下 7 ”级 导线和四等水 表 1导线概算结果 准控制 网所 需的设备及其 主要技术指标 ,并给 出应注意 的问题 ,为 “ 九煤 ”导线计 算 结果 “四煤 ”导线计 算 结果 类似矿 区井 下控制 网的建立 ,提供有 效的理论和 实践依据 。 平 均边 长 1 1 O m 平 均边 长 l 0 7 m 1地 表平面控制网的建立 测角个 数 8 l 测 角个 数 9 4 案例矿井 主采煤 层分为 “ 九煤 ” 和 “ 四煤 ” ,随着采区的不断推 闭合差 4 9 s 闭合差 2 0 s 进, 采区所在位置最近处距井 口约 4 0 0 0 米, 原有的控制网难 以满足 5 ”导线 限差 6 3 s 5 ”导线 限差 6 8 s 生产 的需要 ,考虑到该矿井 的具体情况 ,矿 方决定重新建立矿井地 点位 闭合差 0 . 6 2 l m 点位 闭台差 0 . 4 3 8 m 表和井下的三维控制网。 1 . 1 己有 数 据 的 整 理 和 选 取 线 路总 长 (∑S ) 8 9 2 9 . 9 m 线 路总 长 (zS ) l 0 0 6 2 . 7 m 该矿 区在平 面 坐标系 统为 1 . 5 。带 高斯投 影 ,中央子 午线 为 相对 误差 1 / 1 4 3 8 5 . 4 相对 误差 1 / 2 2 9 5 7 . 5 l 1 2 3 0 ,高程坐标系统为 5 6黄海高程 。该矿地测科提供 了三个 由于 井下导线测量的温度和压强对测量结果有影响 ,且 与全 站 国家 四等点和一个 G P S D级点为起算 点,采取插 网方式建立该矿 区 仪 内默认 的常温 和常压相差较大 ,故应进行温度和压强改 正。除此 E级 G P S网。同时 ,提供 了一个二等 国家水准点和一个按照三等水 之外 ,《 煤矿测量规程 》规 定贯通测量工作 中,还应 当考虑 导线边 长 准要求联测 的水准 点。项 目组对上述点位进行 了实际踏勘 ,对 附近 归化到投影水准 面的改正和 投影 到高斯一 克 吕格平面 的改正 ,结 果 有大面积遮挡物 ,不满足 G P S测量要求 的点位 予以剔 除,选取包括 ( 部分 ) 见表 2 。 三个控制 点在 内的 8个 点位进行 G P S静态观测 。 表 2边长改正后的导线概算结果 1 . 2 G P S控 制 网 “ 九 煤 ”导线计 算 结果 “ 四煤 ”导 线计 算结 果 对 于平面 网,起算点至少应有两个 ,才能解决基准 问题 ;高程 平 均边 长 l l O m 平 均边 长 l 0 7 m 网则至 少需要一个高程起算点 ,才能解决高程基准 问题 。选 取三个 测 角个 数 8 1 测 角个 数 9 4 四等 国家 点作 为平 面网起算基准 ,高程 基准选 取国家二等水准点。 闭合 差 4 9 s 闭合差 2 0 s 由于 该矿 区采 用 的平面坐 标 系统 中央子 午线 为 1 1 2 。3 0 的 限差 6 3 s 限差 6 8 s 点位误 差 0 . 6 5 2 Ⅲ 点 位误 差 0 . 4 0 l m 1 . 5 。高斯投影坐标 ,而 A s h t e c h S o l u t i o n s 2 . 6 软件采 用的坐标 线 路 总长 8 9 2 9 . 9 m 线 路总 长 l 0 0 6 2 . 7 m 系统 为中央子午线为 1 l 1 。的 3 。带 ,需要对解算结 果进 行换带计 相对 误差 1 / 1 3 7 0 3 . 5 相 对 误差 l / 2 5 0 9 5 . 7 算,项 目组采用 H D S 2 0 0 3软件包 自带 的坐标转换模块 ,进行相关数 导 线网 数据 处 理采 用 的软 件是 由 中国矿 业 大学 基 于 V i s u a l 据 的处 理 。 B a s i c平 台,采用经典最小二 乘理 论自主开 发。限于篇幅 ,处理过 2‘ 井 下 数 据 采 集 程略去 。 2 . 1基 本 控 制 导 线 采用测角 中误差作为标准来衡量测量精度 , 其值可用 下式计 算: 基本控制导线应沿矿井主要巷道 ( 包括 : 斜井 、井底车场 、水平 运输 巷、总 回风巷 、集 中运输石 门等 )敷设。根据矿 区实际情况 , 在井下布设 了UO 个 导线 点, 最大边 长为 l 7 1 . 8 Ⅲ , 最小边长为 1 5 . 1 m , 平均 1 0 7 . I m 。其中 “ 九煤 ”7 9个导线点 ( 包含 1 7 个永久 点) ,“ 四 其中: 为测角 中误差 ;d 为两个测 回角度 的差值 ; 月为测 煤 ”3 1 个 导线 点 ( 包含 1 4个永久点 ) 。永久点共有 8组 ,一组 3 5 量测量角度个数 。 个 ,分别 以 A — H后面加数字区别 ,临时 点分别 以数字编号 。 计算结果见表 3 仪器选取 :瑞 士徕卡 T C R 8 0 2防爆全站仪,测角精度 :2 ,测距 表 3 导线 网中误差 精度 :2 m m+2 p p m ( I R单棱镜) ;同时,在下井前对仪器进行检验和
陀螺仪论文-陀螺经纬仪定向的误差分析及导线平差

陀螺经纬仪定向的误差分析及导线平差摘 要:井下经纬仪导线通常是由井底车场开始的向井田边界推进的,根据误差累计原理,导线点位的误差离井底车场越远误差越大。
利用陀螺经纬仪定向时,对其进行误差分析及平差,能有效地控制误差,并提供最优定向法!关键词:陀螺经纬仪;定向误差;导线平差1 陀螺经纬仪定向的精度平定陀螺经纬仪的定向精度主要以陀螺方位角一次测定中误差m T 和一次定向中误差m α表示。
1.1 陀螺方位角一次测定中误差在待定边进行陀螺定向前,陀螺仪需在地面已知坐标方位角边上 测定仪器常数△。
按《煤矿测量规程》规定,前后共需测4~6次,这样就可按白赛尔公式求算陀螺方位角一次测定中误差,即仪器常数一次测定中误差(简称一次测定中误差)为:[]1vv n ±∆- 式中 v i —仪器常数的平均值与各次仪器常数的差值;n △—测定仪器常数的次数。
则测定仪器常数平均值的中误差为:m △平= m T 平=mT n ±∆1.2 一次定向中误差一次定向中误差可按下式计算:式中 —仪器常数平均中误差; —待定边陀螺方位角平均值中误差;m α= 222·m m T m λ∆±平+平+—确定子午线收敛角的中误差。
因确定子午线收敛角的误差m γ较小,可以忽略不计,故上式可写为:m α= 22·m T m ∆±平+平 2 陀螺经纬仪一次测定方位角的中误差分析如前所述,陀螺经纬仪的测量精度,以陀螺方位角一次测定中误差表示。
不同的定向方法,其误差来源也有差异。
目前国内最常用的是跟踪逆转点法和中天法,其中所用的一些数据是根据具体的仪器试验分析所得,有一定得局限性,但对掌握误差分析方法而言,却是无关紧要的。
2.1 跟踪逆转点法定向时的误差分析以JT 15型陀螺经纬仪为例进行探讨。
按跟踪逆转点法进行陀螺定向时,主要误差来源有:①经纬仪测定方向的误差;②上架式陀螺仪与经纬仪的连接误差;③悬挂带零位变动误差;④灵敏部摆动平衡位置的变动误差;⑤外界条件,如风流、气温及震动等因素的影响。
2017年河南省测量工技术比武题库(内部)
一般边长 60~200m 一般边长 30~90m 永久点
29
30
31
在倾角小于30 °的井巷中,使用 DJ6 经 同 一 测 回 中 半 测 检 验 角 与 最 终 两测回间互差 30 纬仪进行导线水平角的观测限差应符 回互差40″ 角之差40″ ″ 合( )。 井下基本控制导线用光电测距仪测距 记录的整理计算 时,光电测距边的计算,应包括( ) 气象改正计算 和检查 等内容。 加、乘常数的改 正计算
工作面控制 附合导线
采区控制 支导线 闭(附)合导线 全长相对闭合差 1/8000 闭(附)合导线 全长相对闭合差 1/4000 连接点
28
井下±7 ″级基本控制导线的主要技术 井田一翼长度 指标有( )。 ≥5km 井下± 15 ″级采区控制导线的主要技 井田一翼长度 术指标有( )。 ≥1km 井下经纬仪导线点分( )。 中转点
每次读数前要 符合气泡严格 居中
水准尺必须扶 直,不得前后、 左右倾斜
62
在进行水准测量时,其水准测量线路 的布设形成一般有( )。 水准测量的误差包括( )。 观测值精度是指误差分布的密集或离 散的程度。衡量精度的指标一般采用 ( )。
附合水准路线 视准轴与水准管 轴不平行的误差
闭合水准路线 仪器升沉的误 差
76
选设井下导线点时,应综合考虑的因 素有( )。
77
井下测角误差主要来源( )等的影响 仪器误差 。
测角方法误差
照准误差
78
经纬仪支导线的点位误差与( )有关 测角误差 。其中测角误差的影响是主要的。 确定主要巷道内 井下高程测量的具体任务包括( )等 各高程点与经纬 。 仪导线点的高 程,以建立井下 井下高程点可设在( )上,便于使用 巷道的顶板 和保存。
陀螺全站仪在矿井定向测量中的应用

陀螺全站仪在矿井定向测量中的应用摘要:本文介绍陀螺全站仪在矿井定向测量中的应用,简述陀螺全站仪定向过程及计算方法,结合工程实例分析陀螺定向的实际精度,为今后的测量工作提供一些经验和建议。
关键词:陀螺全站仪;矿井定向;应用一、前言鞍钢某大型露天矿山开采到-175米水平后改为井下开采。
露天转井下开采工程共有9条竖井,三条斜坡道,9个水平。
井筒最深820米,最浅420米。
除两条主井外各条竖井及东、西斜坡道在-123米水平、-213米水平、-303米水平、-321米水平相向贯通;主斜坡道从地表+120水平向下与-123米水平及东、西斜坡道贯通;两条主井与副井在-567米水平、-633米水平、-695米水平单向贯通。
相向贯通巷道最长距离为3600米,最短距离为600米。
贯通面达60余个,超过2000米的贯通面有4条,超过1000米的贯通面有6条。
该工程前期已完成九条竖井的掘凿与混凝土衬砌工作,后续工程由三个工程队承担巷道施工任务。
我单位承担全部工程的控制测量任务。
为满足竖井定向的精度,我单位购买了一台索佳GP2X全站式陀螺仪。
该仪器由日本索佳公司生产,它结合GP2悬挂式陀螺仪、SET2X全站仪和全站仪内置的处理软件,陀螺仪工作时其摆会绕地球子午线摆动,通过GP2目镜对摆动的观察,并利用全站仪以水平角方式测定出摆幅或测定摆动的时间周期,然后依此计算出摆动中心的陀螺方位角。
相对于传统的陀螺仪,索佳全站式陀螺仪GP2X是由GP2陀螺仪和SET2X全站仪组合而成的用于测定真北方向的测量系统,并在全站仪中内置了逆转点法和中天法两种测量程序,结合GP2陀螺仪、SET2X全站仪和专用处理软件,SET2X全站仪可在观测完成后计算出真北方向,且计算出的真北方向可以很方便地设置到SET2X全站仪水平度盘上。
陀螺全站仪定向精度为±20″;测角精度为±2″。
竖井联系测量采用陀螺全站仪进行定向测量,采用钢丝投点法进行坐标传递测量。
陀螺全站仪在煤矿井下控制测量中的应用

陀螺全站仪在煤矿井下控制测量中的应用摘要:概述陀螺仪原理,叙述陀螺全站仪定向的作业流程和操作方法,通过应用实例对比在导线平差计算时使用陀螺定向边和不使用陀螺定向边的平差成果精度及高精度贯通的实例,论证了使用陀螺全站仪加测适量陀螺定向边能显著提高复杂导线测量精度,为地下工程提供高精度贯通施工的技术保障。
关键词:陀螺仪原理;定向作业流程;定向操作方法;成果精度1 概述陀螺仪是应用高速旋转物体的定轴性和进动性制作的角运动检测装置,主要由陀螺转子、内外框架、力矩马达、信号传感器、电源等部分组成。
陀螺本体在装置内用丝线悬挂使其旋转轴处于水平,当它的陀螺旋转轴以水平轴旋转时,由于地球的旋转而受到铅直方向的旋转力,陀螺的旋转体在水平面内的以真北方向为中心产生缓慢的岁差运动,其旋转轴的方向可通装置外的目镜进行观测,陀螺指针的振动中心方向指向真北。
陀螺全站仪是将陀螺仪和全站仪通过连接构件结合在一起的精密仪器,它不受作业时间和环境的限制,观测较方便,能获得较高的定向精度,被应用于线型复杂、长度大、观测条件差但精度要求高的公路和铁道隧道、矿井、人防工程等的定向测量。
图1 索佳陀螺全站仪GP-1照片2 陀螺全站仪定向的作业流程1.测定仪器常数由于陀螺仪轴衰减微弱的摆动系数f保持不变,故摆动的平均位置可假定为陀螺仪轴的稳定位置。
受制造工艺限制,陀螺仪轴与观测目镜分划板零线对应的光轴及全站仪望远镜轴不能精确的位于同一竖直面中,故假定的陀螺仪轴的稳定位置(陀螺方位角αT)不能精确的与地理子午线A重合,二者的夹角即为仪器常数。
若假定的陀螺仪轴稳定位置位于地理子午线东边,则仪器常数为正,反之则为负。
测定仪器常数的实质是测定已知高等级边的陀螺方位角,计算其与该边的地理方位角的差值△,△=A -αT地。
在下井定向前,在已知高等级边上测定仪器应进行不少于3次,每次测量后要停止陀螺仪运转10至15分钟,且全站仪度盘位置应变换60度左右,须满足各次测量值的互差均小于2倍仪器标称误差。
陀螺定向原理的应用
陀螺定向原理的应用1. 介绍陀螺定向原理是指通过利用陀螺仪的特性来实现定向控制的技术。
陀螺仪是一种测量旋转速度和角度的设备,其原理基于角动量守恒定律。
陀螺定向技术在航空、航海、导航等领域有着广泛的应用。
2. 陀螺定向的优势陀螺定向相比传统的导航技术有以下优势: - 精度高:利用陀螺仪的高精度测量能力,可以实现精确的定向控制。
- 实时性强:陀螺仪可以实时测量旋转速度和角度,使得定向控制能够在实时性要求较高的场景中应用。
- 抗干扰能力强:陀螺仪本质上是利用角动量守恒来测量旋转,不受外界干扰影响,具有较强的抗干扰能力。
3. 陀螺定向的应用领域陀螺定向技术在以下领域有着广泛的应用: ### 3.1 航空航天领域 - 飞行器定向控制:陀螺定向技术可以用于飞行器的姿态控制,保证飞行器在空中的稳定飞行。
- 导航系统:陀螺定向技术可以用于航空器的导航系统,提供精确的定位和方向控制功能。
3.2 航海领域•船舶定向控制:陀螺定向技术可以用于船舶的航向控制,保证船舶在海上航行时的稳定性。
•导航系统:陀螺定向技术可以用于船舶的导航系统,提供精确的定位和方向控制功能。
3.3 导航领域•惯性导航系统:陀螺定向技术可以与加速度计等设备组合成惯性导航系统,用于提供精确的位置和方向信息。
•车载导航系统:陀螺定向技术可以用于车载导航系统,提供精确的导航和定位功能。
4. 陀螺定向原理及工作方式陀螺定向原理基于陀螺仪的工作方式。
陀螺仪内部含有旋转的陀螺,当陀螺仪受到外界力矩作用时,陀螺会产生一个垂直于力矩方向的角动量,力矩越大,旋转速度越快。
利用这一原理,陀螺定向通过测量陀螺仪的旋转速度和角度来实现定向控制。
陀螺定向的工作过程如下: - 步骤1:初始化陀螺仪,将陀螺仪放置在初始位置并进行校准,使得陀螺仪的输出为零。
- 步骤2:测量陀螺仪的旋转速度和角度。
陀螺仪通过内部的传感器测量旋转速度和角度,并将结果输出。
- 步骤3:根据测量结果进行定向控制。
霄云煤矿井下基本控制导线建立及精度评定
霄云煤矿井下基本控制导线建立及精度评定王洪坦;王旭东;王为申【摘要】煤矿井下平面基本控制导线,是井下标定巷道、硐室、回采工作面等平面位置的重要技术基础,也能为巷道掘进贯通测量时提供统一的起始标准.文中总结了霄云煤矿井下±7″级基本控制导线的建立过程,并对导线精度做出了分析.【期刊名称】《矿山测量》【年(卷),期】2012(000)001【总页数】3页(P41-42,45)【关键词】基本控制导线;闭合差;精度【作者】王洪坦;王旭东;王为申【作者单位】济宁矿业集团霄云煤矿工程科,山东金乡 272213;济宁矿业集团霄云煤矿工程科,山东金乡 272213;济宁矿业集团霄云煤矿工程科,山东金乡 272213【正文语种】中文【中图分类】TD173霄云煤矿位于山东省济宁市金乡县霄云寺镇境内,设计生产能力0.90 Mt/a,服务年限40.9年。
随着霄云煤矿二期工程的顺利建设,为了进一步满足生产现场的需要,规范测量工作,提高测量精度,按照《煤矿测量规程》的要求需建立井下一级平面基本控制导线。
本次测量工作的主要目的是建立霄云煤矿井下平面基本控制导线,作为井下标定巷道、硐室、回采工作面等平面位置的重要技术基础。
2009年霄云煤矿在井底车场设定陀螺定向边T1-T2-T3,作为本次建立井下基本控制导线的起始数据。
建立霄云煤矿井下±7″级基本控制导线,基本控制导线主要技术指标参照表1选定[1]。
本次测量选用南方NTS-362R型防爆全站仪及配套脚架、棱镜。
(1)选定测量路线:测量路线由井底车场陀螺边T1-T2-T3,经轨道石门→轨道回风联络巷→回风上山→1302轨道顺槽回风联络巷→1302轨道顺槽→1302轨道顺槽联络巷→轨道上山→轨道石门→T3,整个路径形成闭合环,导线全长约2.2 km。
(2)导线点选定:井下控制导线点设永久点和临时点两种。
永久点应设在巷道顶底板的稳定岩石处,临时点可设在顶板岩石或牢固的棚梁上。
煤矿井下基本控制网的测设及角度平差
煤矿井下基本控制网的测设及角度平差摘要:简要阐述了煤矿井下7秒级控制网和陀螺定向边的测量方法,分析了圆周条件平差和闭(附)合条件平差在控制网角度平差中的综合影响,运用Excel 软件实现了角度平差的自动化计算,取得了良好的经济效果。
关键词:控制网;陀螺定向边;角度平差;精度1、建立控制网的目的为确保矿井长期的安全生产,在井底车场布设14个测点做为矿井首级控制,按7″级导线的精度进行了施测。
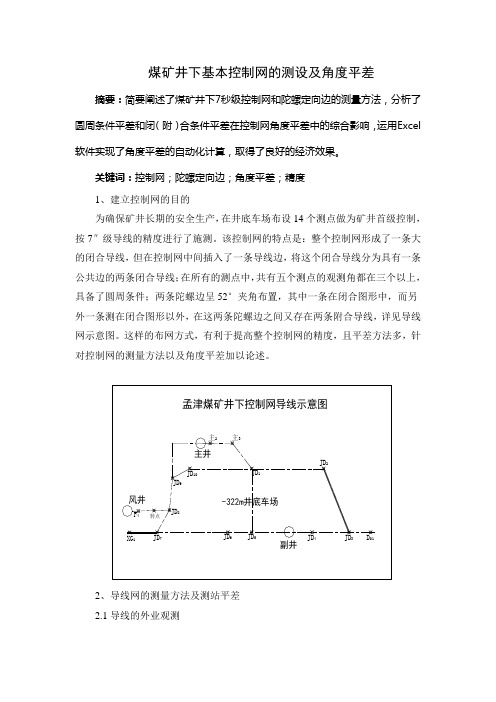
该控制网的特点是:整个控制网形成了一条大的闭合导线,但在控制网中间插入了一条导线边,将这个闭合导线分为具有一条公共边的两条闭合导线;在所有的测点中,共有五个测点的观测角都在三个以上,具备了圆周条件;两条陀螺边呈52°夹角布置,其中一条在闭合图形中,而另外一条测在闭合图形以外,在这两条陀螺边之间又存在两条附合导线,详见导线网示意图。
这样的布网方式,有利于提高整个控制网的精度,且平差方法多,针对控制网的测量方法以及角度平差加以论述。
孟津煤矿井下控制网导线示意图主井风井副井JD 1JD 2JD 3JD 4D 01JD 5JD 6JD 7JD 8XG 1F 4转点JD 9JD 10主3主2-322m井底车场2、导线网的测量方法及测站平差 2.1导线的外业观测采用光学上对点法对中、三架法观测,使用全站仪观测、测回法测角、“后――前――前――后”的观测顺序,结点观测时一次测完所有夹角。
对中次数、观测限差、测回数严格按照《测量规程》7秒级导线的精度要求。
2.2 陀螺定向边的观测及测站平差陀螺定向边采用中天法进行观测,定向程序为:2.2.1首先在矿井地面控制网的已知边上做定向观测,测定仪器在当地的比例常数C值(6个测回),计算出3个C值,取其平均值做为当地本仪器C值。
2.2.2在地面已知边上观测3个测回,计算仪器常数Δ。
2.2.3在井下待定边(JD2—JD3、JD7—XG1)上用3个测回测量陀螺方位角;2.2.4返回地面后在原已知边上采用3个测回测量陀螺方位角,再求得三个仪器常数Δ。
陀螺定向在矿井贯通的应用

④5609 轨顺在煤层中施工,所以贯通相遇点 K 在 竖直方向上不用进行误差预计。
通过以上预计 可 以 看 出,测 量 误 差 引 起 的 贯 通 误 差是主要的。沿贯通巷道中线方向( y'轴方向) 的量边 系统误差,引导线呈闭合而消除,故量边误差影响 较 小。特别是沿贯 通 巷 道 中 线 方 向 的 量 边 误 差 ,对 贯 通 重要方向没有影响。5609 轨顺,当导线总长度 5900m, 按照 7″级导线限差要求进行施测,预计误差为 0. 350m 已大于 0. 3m 的贯通容许偏差。不符合工程要求。当 加测陀螺边后,导线长度减少到 4400m,按照 7″级导线 限差要求进行施测,预计误差为 0. 230m 已小于 0. 3m 的贯通容许偏差。
3 贯通测量误差预计
以设计方案进 行 误 差 预 计,在 工 程 施 工 图 上 设 计
布置导线位置点位。
( 1) 以方案 1 施测,水平重要方向 x' 方向偏差预
计:
①由导线测角误差引起 K 点在 x'轴的误差:
M2 x'β
=
m2β ρ2
∑
R2 y'
=
72 206265
2
× 50309604
= 0. 058m
2 贯通测量方案的选定
井下高 程 测 量 与 井 下 导 线 测 量 同 时 进 行,运 用 DTM - 35 型全站仪进行三角高程测量。测量 前对仪 器进行全面检验校正。
在施测过程中 严 格 按 照 规 程 要 求,提 出 以 下 两 种 施测方案:
( 1) 方案 1: 5609 轨顺( 东) 导线从 - 430m 水平大 巷陀螺边 ST1—ST2 控制点开始,向西到十五采区西部 边界巷,开门按 90°方位角进入 5609 轨顺( 西) 至贯通 K 点。5609 轨顺( 东) 导线从大巷陀螺边 ST1—ST2 控 制点开始,沿十五采区回风,开门按 270° 方位 角进入 5609 轨顺( 东) 至贯通 K 点。贯通导线长度为 5900m, 共计测设 64 站。
2009届本科生毕业论文 加测有陀螺方位角的导线网条件平差

中国矿业大学本科生毕业论文学院:环境与测绘学院专业:测绘工程论文题目:加测有陀螺方位角的导线网条件平差专题:加测有陀螺方位角的导线网条件平差指导教师:职称:教授2009年6月徐州中国矿业大学毕业论文任务书学院环境与测绘学院专业年级测绘工程学生姓名任务下达日期:2009年 2 月16 日毕业论文日期:2009年3月15 日至2009年6月20 日毕业论文题目:加测有陀螺方位角的导线网条件平差毕业论文专题题目:加测有陀螺方位角的导线网条件平差毕业论文主要内容和要求:院长签字:指导教师签字:中国矿业大学毕业论文指导教师评阅书指导教师评语(①基础理论及基本技能的掌握;②独立解决实际问题的能力;③研究内容的理论依据和技术方法;④取得的主要成果及创新点;⑤工作态度及工作量;⑥总体评价及建议成绩;⑦存在问题;⑧是否同意答辩等):成绩:指导教师签字:年月日中国矿业大学毕业论文评阅教师评阅书评阅教师评语(①选题的意义;②基础理论及基本技能的掌握;③综合运用所学知识解决实际问题的能力;④工作量的大小;⑤取得的主要成果及创新点;⑥写作的规范程度;⑦总体评价及建议成绩;⑧存在问题;⑨是否同意答辩等):成绩:评阅教师签字:年月日中国矿业大学毕业论文答辩及综合成绩答辩情况提出问题回答问题正确基本正确有一般性错误有原则性错误没有回答答辩委员会评语及建议成绩:答辩委员会主任签字:年月日学院领导小组综合评定成绩:学院领导小组负责人:年月日摘要随着现代矿山和隧道工程越来越向大型化发展,地下导线的长度也就越来越长,而加测陀螺定向边可以大大提高导线的精度,对于地下矿山和隧道工程测量等均具有重大意义。
由于陀螺定向确定了加测边的方位角,形成了单个或多段(有多条陀螺定向边)方向附合导线,因此它不同于支导线而是有了一个或是多个方向附合条件,使得所测角度需进行平差。
本论文正是出于对煤矿或者其它相关井下测量的研究,对矿山测量和隧道工程测量中加测有陀螺方位角的导线进行讨论,分析相关理论,对其平差的方法和理论进行深入剖析,得出一个较适合矿山测量中加测陀螺方位角的导线平差体系和方法。
陀螺全站仪在井下测量中的应用研究
陀螺全站仪在井下测量中的应用研究张高兴;李忠金【摘要】Total station gyroscope is composed of gyroscope and total station,which is a very accurate measuring instrument and can measure the top azimuth quickly.This paper expounds the orientation survey method of total station gyroscope,analyzes the advantages of gyro station and its application in shaft connection surveying,underground traversing and breakthrough survey.%阐述了陀螺全站仪的定向作业方法,分析了陀螺全站仪的优点及其在矿井联系测量、井下控制测量及贯通测量方面的应用。
【期刊名称】《龙岩学院学报》【年(卷),期】2012(030)002【总页数】4页(P32-35)【关键词】陀螺全站仪;定向测量;导线测量【作者】张高兴;李忠金【作者单位】龙岩学院,福建龙岩364012;福建马坑矿业股份有限公司,福建龙岩364012【正文语种】中文【中图分类】TD175井下测量和地面测量区别很大,主要包括矿井联系测量、井下控制测量和生产碎部测量。
联系测量以往常用方法是用几何定向中的一井定向和两井定向,这两种定向方法的精度较低,《煤矿测量规程》要求其两次独立定向结果互差分别不超过±2′和±1′,这种定向精度对于大范围矿区的井上下位置会产生较大的误差[1]。
同时一井定向和两井定向工序复杂,每次定向花费的时间也较长,有时一次合格完整的定向可能需要一两天的时间,这样势必影响矿山的生产安排。
井下7″级导线及四等水准控制网的设计与实施
井下7″级导线及四等水准控制网的设计与实施【摘要】提出综合采用GPS、陀螺仪、水准仪以及全站仪等仪器,进行高精度矿山三维控制网建立。
以某矿区实践为例,系统介绍建立井下7″级导线及四等水准控制网的主要步骤及其技术指标,主要包括:地表E级GPS网的建立、井下7″级导线测量、四等水准测量和陀螺定向,以及为类似矿区控制网的建立提供有效的理论和实践依据。
【关键词】井下测量;导线测量;水准测量;GPS;陀螺定向前言高精度的矿山三维控制网是矿山日常生产和灾害监测的重要保障,关系到煤矿生产的每一个环节。
GPS、高精度陀螺仪等技术已经在不同领域得到了广泛的应用,并取得了较为理想的效果。
如何采用现代测绘技术建立高精度的井下三维控制网,就成为矿山测绘工作者面临的一个重要问题。
本文针对主副斜井开采矿井,提出综合采用GPS、磁悬浮陀螺仪、水准仪以及全站仪,进行高精度矿山三维控制网的建立,并以某矿区具体实测数据为例,系统介绍建立井下7″级导线和四等水准控制网所需的设备及其主要技术指标,并给出应注意的问题,为类似矿区井下控制网的建立,提供有效的理论和实践依据。
1 地表平面控制网的建立案例矿井主采煤层分为“九煤”和“四煤”,随着采区的不断推进,采区所在位置最近处距井口约4000米,原有的控制网难以满足生产的需要,考虑到该矿井的具体情况,矿方决定重新建立矿井地表和井下的三维控制网。
1.1 已有数据的整理和选取该矿区在平面坐标系统为1.5°带高斯投影,中央子午线为112°30′,高程坐标系统为56黄海高程。
该矿地测科提供了三个国家四等点和一个GPS D级点为起算点,采取插网方式建立该矿区E级GPS网。
同时,提供了一个二等国家水准点和一个按照三等水准要求联测的水准点。
项目组对上述点位进行了实际踏勘,对附近有大面积遮挡物,不满足GPS测量要求的点位予以剔除,选取包括三个控制点在内的8个点位进行GPS静态观测。
1.2 GPS控制网对于平面网,起算点至少应有两个,才能解决基准问题;高程网则至少需要一个高程起算点,才能解决高程基准问题。
陀螺全站仪定向精度评定和在工程中应用

陀螺全站仪定向精度评定和在工程中应用摘要:目前陀螺全站仪标称精度大多在8到20秒之间,而常用全站仪标称精度1秒或2秒,很多测量人员困惑于如何能用这么“低精度”陀螺全站仪来复测检核的“高精度”全站仪测量的精密导线呢?查看了很多陀螺经纬仪(全站仪)精度相关文献,一般只提到某款陀螺经纬仪(全站仪)精度指标达到多少,或者某工程应用中实测精度达到多少,缺乏对精度指标的说明,造成了现在大量精度要求较高项目(如:地铁导线复测)测量技术人员对陀螺精度困惑。
本文从标称精度评定及工程实际应用方法来说明这个问题。
关键词:陀螺全站仪精度、陀螺定向、导线方位校核Abstract:At present,the gyro total station nominal accuracy mostly between 8 to 20 seconds,and commonly used total station instrument nominal accuracy of 1 or 2 seconds,many Surveyor confused on how to with such low accuracy gyro totalstation reflex test check the high precision of total station instrument measurement precision wire? To view the lot of gyro theodolite(total station)relative to the precision of the literature,generally only mentioned a gyro theodolite(total station)precision index reach the number,or a project application measurement accuracy reach,lack of precision description index,caused by now a large number of high precision project(such as:subway traverse azimuth verification)measurement of technical personnel on the precision of gyro is confused.In this paper,the nominal accuracy assessment and engineering application methods to description the problem. Keywords:gyro total station,gyro direction,traverse azimuth verification1、引言目前各地大量建设地铁轨道交通工程,地下定向测量十分重要,隧道《城市轨道交通工程测量规范》中联系测量可采用陀螺经纬仪、铅垂仪(钢丝)组合定向测量;地下控制测量部分要求贯通面一侧隧道长度大于1500米时,适当位置加测陀螺边提高控制导线精度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
井下陀螺定向、7″级控制导线布设方案研究与应用
作者:梁西栋任邓君
来源:《科学导报·学术》2019年第24期
摘要:本项目主要用于布设矿井井下控制网,运用布设陀螺加强边的方式将各采区控制网进行连接,以提高各巷道施工精度及贯通精度。
针对矿区冲击地压显现频繁、大巷风速大等施工难度,自主设计制作新型永久点基桩,并采用等高四连脚架法进行7″级导线联测,极大地
提高了井下控制网布设精度,为井下安全生产提供了保障
关键词:陀螺加强边;采区控制网;支导线;等高四架法;冲击地压;贯通精度
1、项目概况
矿井位于国家规划的十三个大型煤炭基地之一的彬长矿区西北部,占地面积560亩,井田面积219平方公里。
矿井由井底车场巷道向南部延伸经过辅助运输巷和胶带机巷和风巷分支出各个顺槽进入采区。
为了尽早达到设计年产量,保证矿井顺利进行建设生产,为日后西部和南部采区顺槽顺利贯通打下基础,需要进行南部一盘区和西部采区井下控制测量,把西部采区和南部采区控制网进行连接。
2、任务内容及完成情况
2.1工程主要内容
1、西区辅助运输大巷、一盘区辅助运输大巷、一盘区胶带大巷顶板永久铜桩点埋设;
2、西区辅助运输大巷、一盘区辅助运输大巷、一盘区胶带大巷迎头测设陀螺定向边;
3、西区辅助运输大巷-一盘区辅助运输大巷-一盘区胶带大巷施测7″控制导线;
2.2主要完成的工作内容和工作量
1、西区辅助运输大巷、一盘区辅助运输大巷、一盘区胶带大巷共埋设永久铜桩点22个。
2、西区辅助运输大巷、一盘区辅助运输大巷、一盘区胶带大巷各测设陀螺定向边一条,共测设三条陀螺定向边。
3、西区辅助运输大巷、一盘区辅助运输大巷、一盘区胶带大巷建立井下7"级控制导线系统,共施测控制导线4.35公里;
4、成果、成图资料的编制。
3、技术依据
(1)现行《煤矿测量规程》;
(2)《工程测量规范》(GB50026-2007);
4、主要技术指标
4.1 采用的坐标系统
4.1.1 平面坐标系统
本工程成果为1980西安坐标系,3°带高斯正形投影,中央子午线108°。
4.1.2 高程系统
高程系统为1985国家高程基准成果。
4.2 測量成果精度要求
a.井下三角高程测量:
6、井下7″级控制导线施测
6.1井下平面观测
6.1.1 井下永久铜桩点的埋设
矿井井下地压较大,井下导线点经常由于冲击地压被破坏或挤压位移。
在导线和陀螺施测前,首先实地踏勘本工程控制导线途径巷道,发现途径巷道已经全部成型及整饰完毕,为了长久保存测量控制点,根据测量规范要求及矿方生产建设的需要,导线途径巷道全部埋设永久性铜桩点,本次埋设的铜桩点长约40cm,顶端为6cm铜制穿线点。
用充电式电钻打孔埋入顶板,较为稳定稳固。
每个点埋设完成后随即喷上点名、挂好线绳,为下步测量工作做好了准备。
6.1.2 井下导线起算点的确定
本次井下导线起算点为2015年施测的陀螺边“T1-T2-T3”,此组控制点位于西区辅助运输大巷内,皆为保存完好的永久铜桩点。
经检核,夹角、距离、高差相对关系良好,可以作为本次井下控制的起算点(起算点坐标为矿地测科提供的1980西安坐标系成果)。
6.1.3 导线测量实施技术要求
井下施测7"级控制导线,采用徕卡TC1202型全站仪(测角:2",测距:2+2ppm)四架法观测,导线边长及高差采用正倒镜、往返观测。
井下控制导线最终要求测角中误差不大于7″(实际每测回测角中误差最大为3″),导线相对闭合差不超过,(实际相对闭合差远小于限差)。
具体技术要求详见下表:
注:n 为附合导线的总站数;n1、n2分别为控制导线第一次和第二次测量的总站数;mα1、mα2分别为附合导线起始边和附合边的坐标方位角中误差;mβ为导线测角中误差。
6.1.4 井下导线测量
施测井下导线测量按7"级导线要求,采用了徕卡TC1202型全站仪测量,导线布设路线见7"导线控制示意图,导线边长及高差采用了正倒镜、往返观测,导线路径:由西区辅助运输大巷向东测至一盘区辅助运输大巷经过绕道进入一盘区胶带大巷,导线点T7-T6-T5-T4-T3-T2-
T1-Z5-Z6-Z7-F2-F3-F4-L1-L2-F5-L3-F7-F8-F9-F10-F11-F12-F13-L4-L5-F14-F15-F16。
最终导线方位与陀螺定向方位比较:“T6 - T7”~“F9 - F10”,符合差为-11″“F9 - F10”~“F15 - F16”符合差为+5″。
6.2井下高程测量
井下高程测量采用在测井下7"级控制导线时一并测设的三角高程成果。
三角高程测量中仪器高(本工程所用全站仪仪器高与棱镜高等高)。
在观测前和结束后用5m钢卷尺各量一次,两次限差4mm,相邻两点往返测高差不大于10mm+0.3mm*L(L为导线水平边长,以m 为单位)。
采用我处的三角高程测量方法可以代替等外水准测量。
采取的主要措施有:采用等高四架法,高差正倒镜、往返观测,只量取仪器高等等。
我处的《大型贯通井下导线施测方法的研究》已获得2008年度煤炭部级工法。
井下采用等高四架法施测井下导线时,作业人员配备7人(记录一人,观测一人,后视一人,对点一人,挡风二人,送架腿一人)。
7、井下陀螺定向
7.1 陀螺定向边位置确定
本次控制导线长度在4km以上,属于长距离控制导线,为减小导线末端横向误差,提高导线精度,需加测陀螺定向边,在西区辅助运输大巷迎头和一盘区辅助运输大巷、胶带大巷迎头分别加测一条陀螺边,用以控制西部采区和南部一盘区运煤顺槽的导线精度。
三条陀螺边均为永久基桩点,通过7秒导线将整个控制导线连接成为方位附和导线。
7.2 陀螺定向作业方法
7.2.1陀螺定向测量实施
a.陀螺地面常数观测时,仪器、三脚架和电源部份避免阳光直射;井下对点时采用大块挡风布对陀螺仪进行遮挡,使巷道风力减至最小程度。
b.测陀螺时仪器严格整平,观测过程中管水准气泡偏离均不超过0.5格。
每次测量后,由一个测回转到下一个测回观测前,停止陀螺转动10—15min,重新安置陀螺仪、整平和对中仪器,并使度盘位置变换180°/n(n为测回次数);
c.相邻摆动中值互差和相隔摆动中值互差均小于规范允许误差35″和55″;
d.一测回的测前、测后方向值互差均小于规程允许的±10″。
e.采用跟踪逆转点法观测,连续观测五个以上逆转点,计算三个以上陀螺摆动中值。
f.陀螺全站仪的悬挂带零位测前测后分别测量一次,最大为±0.35格,较差最大为±0.05格,小于规程规定的±0.5格和0.2格。
井上下零位变化小于0.1格,计算时可不加入零位改正。
g.本次定向采用GAK-1型15秒级陀螺经纬仪,采用“跟踪逆转点法”结合“中天法”来进行观测,采用2—2—2的作业程序。
已知边为地面井田控制网控制点“E022—E021”。
首先,在地面已知边上进行两个测回的仪器常数测定,然后施测西区辅助运输大巷、一盘区辅助运输大巷、一盘区胶带大巷迎头分别测设一条陀螺边,每条邊用逆转点法和中天法施测两测回。
上井后再在地面已知边进行两测回的仪器常数测定。
陀螺定向工作在永久点埋设好后随即进行。
7.2.2方位角计算
根据井上陀螺定向测量,计算出仪器平均常数△=T-T平,再利用公式α= T平+△-γ计算井下定向边的坐标方位角,其中γ=△L×sinB(L为陀螺仪所在位置的经差,B为纬度)。
井下起始定向边精度满足规范要求,成果可靠。
7.3 陀螺定向精度评定
同一定向边两测回陀螺方位角的最大互差8″(限差40″),测前测后仪器常数最大互差7″(限差40″)。
观测限差规定如下:
(1)测前与测后零位值的互差,对15″级仪器不得超过0.2格,对其它仪器不得超过0.4格;
(2)采用跟踪逆转点法观测时,一般应连续观测五个逆转点,计算三个陀螺摆动中值。
相邻和间隔摆动中值的互差应符合下表的限差规定。
9、工程结论与总结
从控制导线平差的结果可以看出,实际中误差均小于规范允许中误差,表明制定的巷道控制测量设计方案能够满足控制导线测量精度的要求。
1、对于影响测角精度的主要因素-对中问题,我们采用四架法测量,不重复架站,减少对中对测量精度的影响;风特别大时,采取有效的挡风措施和大锤球以最大限度地减小对中误差对导线测角的影响;尽最大限度的采用长边导线,这些措施极大的提高了导线施测精度。
2、检核原始资料的可靠性。
我们对该工程的起始资料,包括方位、坐标、距离、高程、坡度都进行了认真的检核。
下井测量时对起算资料反复查对,确保准确无误。
3、精密导线的测量精度主要取决于测角的精度,本次井下导线布设为等边直伸型,导线长度均匀,对贯通误差的影响极小,经成果分析,该精密导线测量成果可靠,达到技术设计的精度。
4、横向误差是导线点在长度的垂直方向产生的位移,是由测角误差引起;纵向误差是导线点在长度方向产生的位移,是由边长误差引起。
测角误差是横向误差主要的产生来源。
四架法可以消除仪器对中产生的误差,使用瑞士产15秒级GAK-1陀螺经纬仪定向可以作为方位加强边和定向边指导巷道的开拓以提高施工精度。
(作者单位:陕西正通煤业有限责任公司)。