嵌入式体系结构基于ZYNQ第六讲
嵌入式开发之zynqMp---ZynqUltraScale+MPSoC图像编码板zcu102

嵌⼊式开发之zynqMp---ZynqUltraScale+MPSoC图像编码板zcu1021.1 xilinx zynqMp 架构1.1.1 16nm 级别⼯艺 Zynq UltraScale+ MPSoC架构Xilinx新⼀代Zynq针对控制、图像和⽹络应⽤推出了差异化的产品系,这在Xilinx早期的宣传和现在已经发布的⽂档⾥已经说得很清楚了。
她的产品系如图2所⽰。
图2 产品表从图2看到,这个系列的Zynq算是8核(或9核)异构产品:四核的ARM-CortexA53 CPU、双核的Cortex-R5 RPU、Mali-400 GPU(⼀个Geometry核,两个像素核)、PL 逻辑以及视频编解码器Codec核。
在表2中,ZU2E、ZU3E为针对控制类应⽤,逻辑和Block RAM资源较少,没有Video Codec和⾼速收发器。
ZU4E、ZU2E和ZU7E针对视频类应⽤,有内部的UltraRAM资源、Video Codec和GTH⾼速收发器。
其他型号针对⽹络应⽤,除了Video Code没有外,其它⾼⼤上的东西都有,⽐如更⾼速的收发器GTY,还有150G Interlaken和100G Ethernet MAC/PCS/RS-FEC等。
熊猫君是做图像的,下⾯的描述都是针对图像版的Zynq UltraScale+⽽⾔的。
因为PS部分的资源是固定的,⼤家都⼀样,在后⾯⼀起说就⾏。
PL部分因为有这三个东西,将使设计如虎添翼:a)⼤量的Block RAM和Ultra RAM资源,⼩20Mb的内部RAM资源,对分块处理图像,那应该会带来不少的便捷;b)Video Code:这个东西是集成在PL侧的硬核,有了它,图像压缩和解压缩都不⽤愁了;c)GTH:PL端集成的GTH收发器,对SDI、DP等图像接⼝接⼊那是⼗分的⽅便,当然也可以做PCIe咯。
不多说了,熊猫君从Xilinx官⽅⽂档UG1085上截⼀个图来表⽰这个⾼⼤上通⽤SoC的系统级架构,也就是下⾯的图3啦。
zynq 方案
zynq 方案概述:Zynq 方案是一种采用 Xilinx 公司的 Zynq 系列 SoC(片上系统)的嵌入式硬件和软件设计解决方案。
该方案将硬件和软件结合在一个芯片上,既可运行实时的嵌入式应用程序,又可支持高级的硬件加速和可编程逻辑设计。
一、Zynq 架构Zynq 架构是由 ARM 处理器和 FPGA(现场可编程门阵列)组合而成的。
它结合了 ARM 处理器的灵活性和高性能以及 FPGA 的可编程性和并行计算能力。
1. ARM 处理器Zynq SoC 集成了 ARM Cortex-A9 处理器,它是一种高性能、低功耗的处理器,具有多级缓存和 NEON SIMD(单指令多数据流扩展指令集)加速器,可用于处理复杂的控制和实时任务。
2. FPGAZynq SoC 中的 FPGA 部分是 Xilinx 公司的 Artix 或 Kintex FPGA。
它具有灵活的可编程逻辑资源,可根据需求实现不同的硬件功能,如数字信号处理、图像处理和网络加速等。
二、Zynq 方案的应用领域Zynq 方案在各行各业的嵌入式系统设计中有广泛的应用,包括但不限于:1. 通信与网络Zynq 方案广泛应用于通信和网络设备中,例如高性能路由器、光纤通信系统和无线基站。
其高度集成的特性和灵活的可编程性,使得设备可以满足不断变化的通信标准和需求。
2. 工业自动化Zynq 方案在工业自动化领域中发挥着重要作用,包括控制器、工厂自动化、机器视觉和运动控制系统等。
其硬件加速和实时性能使得工业设备能够高效地执行复杂的控制和监控任务。
3. 汽车电子Zynq 方案在汽车电子领域具有广泛的应用,包括车载信息娱乐系统、驾驶员辅助系统和汽车网络。
其高度自定义的硬件加速和嵌入式处理器的结合,能够提供更高的性能和更低的功耗。
4. 医疗设备Zynq 方案在医疗设备中被广泛使用,例如医疗成像、医疗监测和生命支持系统。
其灵活性和可编程性使得设备可以适应不同类型的医疗需求和算法。
《面向ZYNQ嵌入式平台的EtherCAT通信协议栈设计与实现》

《面向ZYNQ嵌入式平台的EtherCAT通信协议栈设计与实现》一、引言随着工业自动化和智能制造的快速发展,EtherCAT (Ethernet for Control Automation Technology)通信协议因其高实时性、高效率和高扩展性,逐渐成为工业控制领域的主流协议之一。
本文旨在介绍面向ZYNQ嵌入式平台的EtherCAT通信协议栈的设计与实现。
首先,概述了EtherCAT的特性和ZYNQ嵌入式平台的重要性。
其次,回顾了国内外EtherCAT应用与研究的现状,并对本文所研究内容做了简要的阐述。
二、EtherCAT协议概述EtherCAT是一种基于以太网的实时通信协议,具有高实时性、高效率和高扩展性等特点。
它通过主从节点间的数据交换,实现了对工业设备的精确控制。
EtherCAT协议主要包括网络层、实时数据层和应用层等几个部分。
其中,网络层负责数据的传输和转发;实时数据层负责数据的同步和更新;应用层则根据实际需求定义了具体的通信功能。
三、ZYNQ嵌入式平台简介ZYNQ是Xilinx公司推出的一款基于ARM和FPGA的嵌入式平台,具有高性能、低功耗和可定制化等特点。
在工业控制领域,ZYNQ嵌入式平台因其强大的计算能力和灵活的硬件配置,被广泛应用于各种复杂的工业控制系统中。
四、EtherCAT协议栈设计面向ZYNQ嵌入式平台的EtherCAT协议栈设计主要包括以下几个方面:1. 网络层设计:网络层采用标准的以太网通信技术,通过MAC地址进行节点间的数据传输和转发。
同时,为了满足高实时性的要求,设计了优化网络传输的策略,如多线程处理、优先级调度等。
2. 实时数据层设计:实时数据层负责数据的同步和更新。
通过定义数据结构、数据传输方式和数据更新策略等,实现了对工业设备的精确控制。
同时,为了满足高效率的要求,采用了分布式数据处理和缓存技术。
3. 应用层设计:应用层根据实际需求定义了具体的通信功能。
嵌入式开发平台Zynq芯片介绍

嵌⼊式开发平台Zynq芯⽚介绍Zynq发展历史Zynq是由全球最⼤的可编程逻辑平台供应商,Xilinx,在2011年末发布的具有崭新架构的芯⽚。
熟悉FPGA技术领域的朋友应该了解Xilinx在可编程逻辑界的地位。
但是,从Zynq架构的⾓度来看,它不能被称之为传统的FPGA芯⽚。
Zynq的架构可以通过以下公式来表⽰:Zynq = ARM + FPGAZynq是世界上⾸款将⾼性能ARM Cortex A9核和可编程逻辑FPGA集成到⼀起的器件。
之所以说Zynq不能被称为FPGA,是因为在Zynq中起到核⼼控制和管理地位的,其实是ARM核芯⽚,⽽FPGA可以看作是ARM芯⽚的外围器件。
迄今为⽌,Xilinx公司已经发布了两种不同类型的Zynq芯⽚,分别是Zynq-7000 AP SoC和Zynq UltraScale+ MPSoC。
后者是前者的进化版,Zynq-7000 AP SoC的处理器内核是双核ARM Cortex A9,,⽽Zynq UltraScale+ MPSoC的内核变成了四核的ARM Cortex A53,⽽且额外增加了GPU,视频编解码器等,外设资源也更丰富了。
简单来说,Xilinx⽤了三年时间把Zynq 7000性能在抬⾼了⼀个档次,于是就有了Zynq UltraScale+。
博主本⼈⼿中⽬前只有⽐较低端的Zynq 7000系列开发板,所以后续的博⽂都将围绕着Zynq 7000系列芯⽚的研究进⾏更新。
以后⽂章中提及的Zynq,都指代Zynq 7000 AP SoC芯⽚。
Zynq架构上⾯这张图是我从Xilinx官⽹找到的关于Zynq的架构图,仔细观察,我们可以看到,Zynq整体被分为两⼤部分,分别⽤绿⾊调和黄⾊调背景表⽰。
上半部绿底表⽰的是ARM Cortex A9双核,下半部黄底表⽰的是可编程逻辑,也就是FPGA。
在Zynq开发中,习惯性将处理器内核部分称为PS(Processing System),FPGA部分成为PL(Programmable Logic)。
基于 ZYNQ 的嵌入式 Linux 系统开发嵌入式课程设计报告
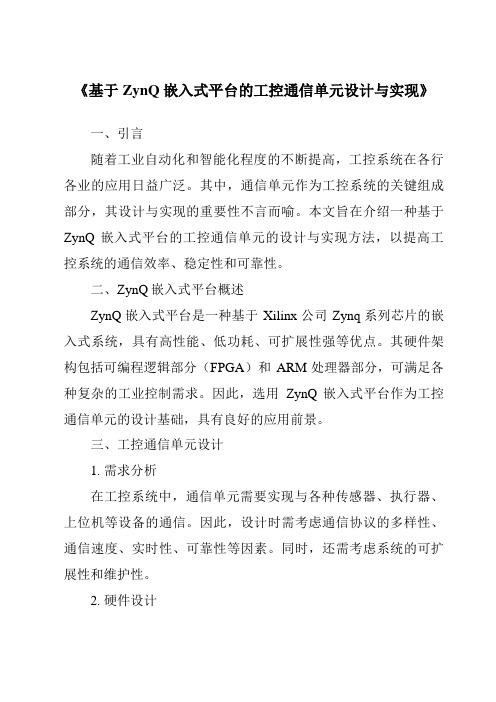
嵌入式系统课程设计报告题目基于ZYNQ的嵌入式Linux系统开发2022年春季学期一、实验目的1、完成BootLoader编译2、完成Linux内核编译3、利用ZYBO实现Linux移植二、环境需求OS:Linux,Ubuntu64位Tools:Vivado2014.2(Windows版)、Vivado2015.4(Linux版)三、实验内容(1)嵌入式Linux移植流程基本的开发步骤:1、更新国内镜像源和安装基本的32位兼容库2、利用交叉编译工具编译BootLoader3、安装u-boot-tools套件并编译Linux内核4、配置设备树并编译设备树文件5、根据zybo board的引脚配置文件生产新的项目6、打开项目并生成Bitstream文件7、生成FSBL文件8、SD卡分区与文件系统移植9、上电测试观察串口信息图1ZYNQ移植Linux基本流程(2)ZYNQ-7000系列的Linux系统开机流程图2ZYNQ-7000运行Linux系统的开机流程图复位后,系统内建的Boot ROM加载第一阶段开机程序(FSBL),接着加载比特流(bitstream)去初始化整个可程序逻辑(Programmable Logic, PL)。
最后U-Boot加载LinuxKernel、DeviceTree以及RootFileSystem启动Linux系统。
四、实验步骤1、Linux下Vivado环境变量设定。
在打开一个新的终端之后,必须将终端的环境变量加上Vivado的文件环境变量或者可以利用终端启动脚本将Vivado环境变量在启动时加入。
source/opt/Xilinx/Vivado/2015.4/settings64.sh2、编译u-boot来作为BootLoader。
(1)设置国内镜像源,用apt包管理工具更新源目录,安装相关的兼容库:(2)打开u-boot-Digilent-Dev。
修改zynq_zybo.h和zynq_common.h(3)配置和利用交叉编译工具编译u-boot(4)将U-boot复制为u-boot.elf文件3、编译Linux内核(1)安装u-boot-tools工具(2)编译linux内核进入Linux-Digilent-Dev文件夹,config为xilinx_zynq_defconfig以及设定UIMAGE_LOADADDR0x8000,并指定架构为ARM架构,利用交叉编译工具编译uImage文件(3)配置设备树DeviceTree将原来的终端设备在设备树文件里替换之后再编译4、用Vivado生成Bitstream文件打开Vivado执行create_project.tcl,使用Vivado打开linux_bd.xpr生成的Block Design点选Program and Debug->Generate Bitstream产生比特流(bitstream)5、建立FSBL(First Stage Boot Loader,FSBL)6、生成BOOT.bin,用Create Image生成BOOT.bin7、利用gparted分区SD卡为fat32和ext4两个分区8、将Boot.bin、devicetree.dtb、uImage三个文件拷贝到SD卡fat32分区9、将SD卡ext4分区挂载在/tmp/linaro文件下,将文件系统用rsync同步从/tmp/linaro到SD卡ext4分区下。
基于zynq处理器的实时飞控导航系统及方法

基于zynq处理器的实时飞控导航系统及方法一、引言在当今飞控导航系统领域,基于Zynq处理器的实时飞控导航系统及方法正逐渐受到更多关注。
Zynq处理器作为一种嵌入式处理器,在飞行控制系统中展现出了许多优势。
本文将深入探讨基于Zynq处理器的实时飞控导航系统及方法,包括其原理、设计、应用和未来发展方向。
二、Zynq处理器简介1. Zynq处理器概述Zynq处理器是由赛灵思(Xilinx)公司推出的一种嵌入式处理器,它集成了ARM处理器和可编程逻辑器件(PL)。
这种特殊的结构使得Zynq处理器在飞行控制系统中具有较高的灵活性和性能。
2. Zynq处理器的特点Zynq处理器具有低功耗、高性能、可编程性强等特点,这使得它在实时飞控导航系统中得到了广泛应用。
Zynq处理器还支持多种通信接口和数据处理能力,为飞控导航系统提供了良好的硬件基础。
三、实时飞控导航系统原理1. 飞控导航系统概述实时飞控导航系统是指能够在飞行过程中实时获取飞行姿态、位置信息,并实现飞行轨迹的控制系统。
它通常包括传感器采集、数据处理、控制算法等多个模块。
2. 基于Zynq处理器的实时飞控导航系统基于Zynq处理器的实时飞控导航系统利用Zynq处理器的强大计算能力和灵活性,将传感器采集的数据实时传输至处理器进行处理,并通过控制算法实现对飞行器的准确控制和导航。
四、设计与应用1. 实时飞控导航系统设计实时飞控导航系统的设计包括硬件设计和软件设计两部分。
在硬件设计中,Zynq处理器作为核心部件,与传感器、通信模块等硬件设备进行接口连接。
在软件设计中,应用开发人员利用Zynq处理器的可编程特性,编写控制算法和数据处理程序。
2. 实时飞控导航系统应用实时飞控导航系统广泛应用于各类飞行器中,包括民用和军用无人机、航空器等。
通过基于Zynq处理器的实时飞控导航系统,飞行器能够实现更加精准和安全的飞行控制和导航。
五、未来发展方向基于Zynq处理器的实时飞控导航系统在未来将呈现出更多的发展方向。
Zynq平台嵌入式本地光谱分离微型高光谱仪研制

㊀2019年㊀第3期仪表技术与传感器Instrument㊀Technique㊀and㊀Sensor2019㊀No.3㊀基金项目:深圳市基础研究项目(JCYJ20150324141711612,JCYJ20150930104948169,JCYJ20170302142617703);国家自然科学基金项目(61227802,61605119);深圳技术大学科研启动项目(201702)收稿日期:2018-01-31Zynq平台嵌入式本地光谱分离微型高光谱仪研制庞高峰1,王志云1,赵志刚2,陈超民1,金绍勋1,黄建衡1,雷耀虎1,屈军乐1(1.深圳大学光电工程学院,广东深圳㊀518060;2.深圳技术大学(筹)新材料与新能源学院,广东深圳㊀518118)㊀㊀摘要:高光谱图像数据量大,对数据传输带宽要求高,通常难以在结构紧凑的微型高光谱仪中实现实时调焦与视频流传输等功能㊂文中基于新型快照马赛克高光谱传图像感器,设计实现了一套嵌入式微型高光谱仪,在本地完成传感器的驱动和高光谱数据分离㊂单波段光谱图像数据经千兆以太网传输至上位机,从而大幅降低了对传输带宽的要求,大幅增强了调焦与光谱视频预览效果㊂实测结果显示,该系统高光谱图像传输帧频可达50帧/s,能够满足高时间分辨应用下的实时调焦与动态信息捕获的需求㊂关键词:Zyny;微型高光谱仪;高光谱;图像传感器;光谱分离;实时中图分类号:TN911㊀㊀㊀文献标识码:A㊀㊀㊀文章编号:1002-1841(2019)03-0023-05DevelopmentofMicro⁃hyper⁃spectrometerwithEmbeddedLocalSpectralSeparationBasedonZynqPlatformPANGGao⁃feng1,WANGZhi⁃yun1,ZHAOZhi⁃gang2,CHENChao⁃ming1,JINShao⁃xun1,HUANGJian⁃heng1,LEIYao⁃hu1,QUJun⁃le1(1.CollegeofOptoelectronicEngineering,ShenzhenUniversity,Shenzhen518060,China;2.CollegeofNewMaterialsandNewEnergies,ShenzhenTechnologyUniversity(Preparatory),Shenzhe518118,China)Abstract:Itisdifficulttoimplementthefunctionssuchasreal⁃timefocusingandvideostreamingtransmissioninacompactmicro⁃hyper⁃spectrometer,becauseoflargeamountsofhyperspectralimagedataandhighbandwidthrequirementsfordatatrans⁃mission.Asetofembeddedmicro⁃hyper⁃spectrometerbasedonthenewhyperspectralmosaicsnapshotimagerwasdesignedinthework.Theimagesensordriverandthespectraldataseparationwereimplementedonthespectrometer.Single⁃bandspectralimagedatawastransmittedtothehostcomputerthroughtheGigabitEthernetinterface,thusthetransmissionbandwidthrequirementsre⁃ducedgreatly.Itdramaticallyimprovedfocusingspeedandvideopreviewperformancebyusingabovemethod.Themeasuredresultshowsthatthehyperspectralimagetransmissionframerateofthesystemcanreached50FPS,whichcompletelymetthedemandofreal⁃timefocusinganddynamicimagecaptureinthehightime⁃resolutionapplications.Keywords:Zyny;micro⁃hyper⁃spectrometer;hyperspectral;imagesensor;spectralseparation;real⁃time0㊀引言高光谱成像技术能够同时获取被测物的光谱与图像信息,不仅可以对待测物体进行定性与定量分析,还可以定位分析,是光谱成像技术发展的一个重要方向[1-3]㊂但高光谱图像信息的获取意味着数据传输量的大幅增加,这必然要对成像系统数据带宽提出更高的要求㊂对于当前迅速发展的微型高光谱成像系统而言,受结构尺寸㊁性价比等因素限制,其数据采集与处理能力相对较弱,难以在结构紧凑的微型高光谱仪中实现实时调焦与视频预览等对数据带宽要求较高的功能[4-7]㊂为了在多旋翼无人机载高光谱成像㊁现场高速机器视觉等对微型高光谱仪尺寸及重量有严格要求的场合获取高光谱图像,本文基于新型快照马赛克高光谱传感器(hyperspectralmosaicsnapshotimager),设计并实现了一套嵌入式微型高光谱仪㊂该传感器通过在标准CMOS芯片感光面的每个像素上沉积特殊设计的马赛克块状滤光膜,形成25通道的光谱带,有望在极其紧凑的几何结构内以视频流的速度形成高光谱图像[8-11],从而克服传统光谱仪采集系统采用滤光片㊁线扫描等方式记录光谱信息时,需要庞大体积和很长采集时间的问题㊂目前,这一光谱成像技术已开始应用于多个领域,如农业㊁军事㊁遥感㊁环境检测㊁智㊀㊀㊀㊀㊀24㊀InstrumentTechniqueandSensorMar.2019㊀能控制等[12-13]㊂针对视频流及高光谱图像数据带宽要求高的问题,本文通过在嵌入式可扩展处理平台进行本地高光谱数据分离的方法,将25通道光谱数据进行分离,从而可在调焦与预览环节仅将容量为1/25的高光谱图像数据经千兆以太网接口传输至上位机,从而大幅降低了调焦与预览环节对传输带宽的要求㊂1㊀系统方案及硬件结构设计所设计的高光谱图像采集系统由微型高光谱仪㊁千兆以太网㊁上位机组成㊂其中高光谱微型光谱仪主要由高光谱图像传感器㊁可扩展处理平台Zynq㊁DDR3SDRAM㊁千兆网接口组成㊂已设计完成的高光谱微型光谱仪实物图如图1所示㊂图1㊀高光谱微型光谱仪实物图微型高光谱仪的主控芯片为XC7Z020,属于可扩展平台Zynq系列㊂Zynq分为PL(programmablelogic)和PS(processingsystem)2个部分,PL部分为大面阵FPGA,PS部分为2个ARMCortex-A9核,性能十分强大㊂Zynq集成了ARM处理器的软件可编程性与FPGA的硬件可编程性,可实现硬件加速,同时还在单个器件上集成了CPU㊁DSP㊁ASSP以及混合信号功能㊂本系统内存芯片采用2片型号为IS43TR16256AL-125KBLI的DDR3SDRAM,容量为1GB,能够提供足够的缓存空间,为高光谱大量数据采集与嵌入式本地光谱数据分离提供了可能性㊂DDR3相较于DDR2,功耗和发热量小,工作频率更高,通用性强㊂千兆以太网接口采用JFM3811F-FL01-4F接口,连接在Zynq的ENET0上㊂系统采用的高光谱传感器在普通CMOS芯片感光面上镀有不同的光谱通带滤光膜如图2所示,芯片总像素大小为2048ˑ1088,每5ˑ5个像素为1个单元,形成马赛克块状结构㊂单元中每个像素可通过的光谱波段各不相同,各单元之间完全相同,感光面共有25个光谱波段通道㊂快照马赛克高光谱传感器的数据输出采用的是图2㊀芯片感光面示意图LVDS(lowvoltagedifferentialsignaling,低电压差分信号)接口,LVDS可以很好地屏蔽干扰,提高信号传输时的稳定性和可靠性,LVDS要求在PCB布线时,信号线等长等距,如图3所示㊂图3㊀LVDS布线硬件电路采用12层高器件密度硬-软-硬PCB设计,连接2块硬板的软板弯折后可以节省很大空间,如图4所示㊂微型光谱仪外形尺寸为11mmˑ6mmˑ7mm,小巧便携,增加了光谱仪的应用场景和适用范围㊂图4㊀软硬板连接实物图2㊀基于Zynq的高光谱数据采集高光谱数据采集流程如图5所示㊂图5㊀高光谱数据采集流程Zynq需要为快照马赛克高光谱传感器提供驱动时序,配置正确的参数,然后从芯片图像数据输出通道接收数据㊂数据串并转换后通过DMA将其保存到㊀㊀㊀㊀㊀第3期庞高峰等:Zynq平台嵌入式本地光谱分离微型高光谱仪研制25㊀㊀DDR3SDRAM中㊂快照马赛克高光谱传感器输出16路数据信号,1路控制信号和1路时钟信号㊂Zynq给快照马赛克高光谱传感器提供时钟㊁电源㊁使能㊁帧请求㊁参数设置等信号㊂帧请求信号发出后,数据信号就会输出㊂FPGA中对数据传输㊁处理一般以单边沿时钟信号进行,Zynq接收到数据信号后先要将数据转换为单边沿数据㊂像素采样深度为10bit,以串行的方式从16路数据信号端口输出㊂Zynq需要对数据进行串并转换,将每个像素数据转换为并行数据便于后续处理和保存㊂由于数据是不断连续输出的,要根据控制通道的数据来判断哪一个bit是这个像素数据的第一个bit位㊂当快照马赛克高光谱传感器处于空闲状态时,16路数通道会输出固定校准数据,通过采集校准数据来校正每个通道㊂16路数据通道默认校准数值为0x055,控制通道默认数值为0x200,需要用一个10位宽的寄存器变量存储串行输出数据,当接收够10bit数时判断是否为校准数据,若不是则变量在采集下一个10bit数时向后错开一位采集,这样依次错位采集直到采集的数值正好为校准数据,如图6所示㊂图6㊀信号校准示意图数据通道校准后,Zynq发出帧请求,16路数据通道开始输出数据㊂快照马赛克高光谱传感器像素为2048ˑ1088,每个通道取连续的128个像素,16个通道同时工作,128个主时钟周期取完1行2048个像素㊂1个主时钟周期16个通道取16个像素,每个像素10bit,共160bit㊂DMA或DDR3SDRAM传输数据是以32bit为单位的,必须将160bit数据切分为5个32bit进行传输㊁存储㊂ARM通过对DMAIP核的控制将数据存储到DDR3SDRAM中㊂快照马赛克高光谱传感器16通道工作示意图如图7所示㊂图7㊀16通道工作示意图3㊀光谱分离算法与实现每一帧光谱图像数据大小为2.6MB,若数据全部传输出去势必造成巨大的传输压力,导致上位机显示时就会出现卡顿不流畅的现象,无法完成实时调焦㊂在调焦或图像预览过程中,只需传输某一个光谱波段数据,不必获取全部波段光谱数据,可在嵌入式本地将各个波段的光谱数据进行分离后,传输单个通道的高光谱数据㊂Zynq的PL部分为PFGA,可实时处理光谱图像数据,处理速度完全可以满足本地光谱数据分离的需求㊂首先需要将存储在DDR3SDRAM中的完整光谱数据通过DMA取出来,然后通过一个32位宽的FIFO将数据传输给光谱分离模块,光谱分离模块将数据分离后又通过DMA将数据存储到DDR3SDRAM中㊂用户需要查看某一个通道时,就连续实时取某一个波段光谱图像,需要查看全部波段光谱时,将完整的高光谱图像传输到上位机上㊂高光谱分离流程图如图8所示㊂图8㊀高光谱分离流程图以5ˑ5型号的快照马赛克高光谱传感器为例,有25个波段,如图9所示,假设需要取第7个波段的光谱图像,根据掩膜板中通道的位置,计算出横纵坐标掩码值(mask_x㊁mask_y)㊂图9㊀25通道掩膜板示意图假想将掩膜板放置在图像上,原点开始,从左往右,从上至下依次移动掩膜板,每移动一次从掩膜板分离出阴影部分的数据,直至掩膜板遍历整幅图像㊂如图10所示,只分离出阴影部分的数据,然后形成一副新的图像,就是我们想要得到的第7个波段通道的光谱图像㊂高光谱分离模块的实现可分为3步,采用三级流水线技术,同步并行快速处理㊂(1)等待FIFO不为空,数据准备完毕后高光谱分㊀㊀㊀㊀㊀26㊀InstrumentTechniqueandSensorMar.2019㊀图10㊀高光谱分离原理示意图离模块从FIFO中取出5个32bit数据,拼接为160bit的数,就得到了快照马赛克高光谱传感器输出的16个原始像素数据㊂每取5个数,列标记(tag_x)加1,指向下一组数㊂列标记达到最大值后说明本行处理完毕,列标记归零同时行标记(tag_y)加1指向下一行㊂每行处理完毕后根据mask_y来判断,如果当前行包含有要分离的高光谱图像数据则令DMA使能标志位有效,DMA开始将处理后的数据回传至DDR中保存㊂核心代码如下:if(s_tvalid&&s_tready)begin㊀㊀㊀//准备完毕㊀if(cnt_five=4)begin//5个32bit取完毕㊀㊀cnt_five<=0;㊀㊀if(tag_x==(px-1))//一行数据分离完毕㊀㊀㊀tag_x<=0;㊀㊀㊀tag_y<=tag_y+1 b1;//针指向下一行㊂㊀㊀㊀if(tag_y%type==mask_y)//判断行有效㊀㊀㊀㊀start<=1 bl://使能endelse㊀tag_x<=tag_x+1 bl;endelse㊀cnt_five<=cnt_five+1 bl;㊀data_a=data_a>>32;//拼接5个32bit㊀data_a[159ʒ128]=s_tdata;end(2)根据高光谱分离控制信号㊁横纵坐标掩码值,遍历取出的各个像素并分离出指定光谱波段数据并存储于存储器(band_data)中㊂核心代码如下://遍历160bit中的16个像素for(i=0;i<16;i=i+1)//判断是否是指定光谱谐波段数据if(((tag_x+px∗i)%type)=mask_x)//分离指定光谱波段数据band_data[(tag_x+px∗i)/type]<=data_a[(10∗i+2)+:8]:(3)将分离出来的数据通过DMA传输至DDR3SDRAM中存储㊂由于行与行之间互相没有关联,且是按照顺序来的,当每行转换完毕后便将存储器中的数据送到DMA中㊂这样也可以减小PFGA中的存储器,节省大量的资源㊂首先判断DMA使能,然后每传输1个数,计数器(cnt_d2f)加1,当计数器达到最大值后表明此次传输完毕DMA使能信号置无效㊂因为DMA位宽为32bit,所以需要将高光谱分离出来的数据拼接为32bit㊂核心代码如下:㊀if(start)begin㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀㊀//DMA使能if(cnt_d2f==(img_x/type/4-1))//传输完毕㊀start<=0;elsebegin㊀cnt_d2f<=cnt_d2f+1 bl;//计数器加一㊀//数据位宽整合为32bit㊀m_tdata<={band_data[cnt_d2f∗4+3],band_data[cnt_d2f∗4+2],band_data[cnt_d2f∗4+1],band_data[cnt_d2f∗4]};㊀end㊀end4㊀测试与分析本系统Zynq中安装了linux操作系统,便于后续开发和维护㊂在linux系统中实现了BOA网络服务器(BOAwebserver),用户可以通过任何安装有浏览器的终端访问光谱仪,并在浏览器中查看单通道光谱视频数据,或读取全波段高光谱图像㊂在上位机的浏览器地址栏中输入微型高光谱仪的IP地址即可打开工作界面,如图11所示㊂右侧有2个按钮,用户通过单击第一个按钮来实时查看单波段光谱图像视频,单击第二个按钮获取一帧全波段光谱图像㊂图12㊁图13分别为对一个魔方所成的单通道光谱图像与全部波段光谱图像㊂利用Chrome浏览器上自带的调试工具可以查看每次请求1帧数据所需时间㊂上位机每次请求高光谱图像数据的时间间隔应大于光谱仪生成1帧高光谱图像数据实际使用时间,否则会出现错误,导致上位机出现图像显示不全等问题㊂高光谱分离前上位机每次请求1帧数据所需时间为545ms左右,如图14所示㊂为了保证请求过程中不出现㊀㊀㊀㊀㊀第3期庞高峰等:Zynq平台嵌入式本地光谱分离微型高光谱仪研制27㊀㊀图11㊀浏览器查看光谱图像界面图12㊀魔方的单通道光谱图像图13㊀魔方的全波段光谱图像图14㊀高光谱分离前请求时间错误,设置请求时间间隔为600ms,帧率为1.67FPS㊂高光谱分离后上位机每次请求一帧数据所需时间为16ms左右,如图15所示㊂为了保证请求过程中不出现错误,设置请求时间间隔为20ms,帧率为50FPS㊂通过高光谱分离前后帧率对比,可见高光谱分离后的帧率是分离前的大约30倍,帧率提升效果十分显图15㊀高光谱分离后请求时间著㊂在实测过程中,反复调节镜头焦距,浏览器中可实时观测到不同焦面的清晰图像,实现了动态调焦与视频预览㊂5㊀结论本文通过对嵌入式微型高光谱仪高光谱数据进行本地分离,获取单通道光谱图像,可实现动态调焦与实时光谱视频预览㊂高光谱数据分离由FPGA实现,相较于常用的软件处理方式效率更高,并减轻了系统处理器的负担㊂本文所实现的微型高光谱仪增强了高光谱图像实时显示效果,扩大了微型高光谱仪的适用场合,能够为普通消费者提供随时随地采集高光谱图像数据㊂参考文献:[1]㊀ZHANGC,LIUF,KONGW,etal.Applicationofvisibleandnear⁃infraredhyperspectralimagingtodeterminesolublepro⁃teincontentinoilseedrapeleaves.[J].Sensors,2015,15(7):16576-16588.[2]㊀LUOR,LIAOW,PHILIPSW,etal.Animprovedsemi⁃su⁃pervisedlocaldiscriminantanalysisforfeatureextractionofhyperspectralimage[C].UrbanRemoteSensingEvent.IEEE,2015:1-4.[3]㊀ROBLES⁃KELLYA,CONGPH.Imagingspectroscopyforsceneanalysis[M].SpringerLondon,2013.[4]㊀ZHANGF,GAOJ,WANGN,etal.AcompactLWIRima⁃gingspectrometerwithavariablegapFabry⁃Perotinterferom⁃eter[C].InternationalConferenceonPhotonicsandOpticalEngineering.2017:102562W.[5]㊀王彩玲,胡柄樑,王洪伟,等.基于以太网机群的海量高光谱数据处理系统平台设计[J].应用光学,2013,34(4):604-608.[6]㊀WUY,GAOL,ZHANGB,etal.EmbeddedGPUimplemen⁃tationofanomalydetectionforhyperspectralimages[C].SPIERemoteSensing.InternationalSocietyforOpticsandPhotonics,2015:964608.(下转第33页)㊀㊀㊀㊀㊀第3期张端等:摆动式电磁能量收集装置的设计与仿真33㊀㊀式中:P为装置最大发电功率;Ucoil为8个线圈产生的总电动势;R为一匝线圈的内阻㊂当负载电阻等于线圈内阻时负载有效功率可达最大㊂计算得出负载最大有效功率为103.2mW㊂对比2017年1月刊登的文献[12],设计了一种结构精巧的电磁振动能量收集装置,在6Hz频率的手动摇摆下能够产生2.92mW的功率㊂文章装置与之相比,虽然体积和线圈数略微大一些,但是发电功率提升很大㊂因此文章装置优势明显㊂4 结论文章提出一种摆动式电磁振动能量收集装置,设计了外圈12齿内圈8齿结构,最大化平衡了装置摆动时受到的电磁定位力㊂同时,装置的摆动重心偏移原点的设置,能够充分感应装置本身加速度的变化以及所在平面的变化,有效地收集能量㊂利用AnsoftMax⁃well动态仿真,该装置在摆动频率为1Hz的情况下,产生的总感应电动势可达2.24V,最大有效功率为103.2mW,可为多数的无线传感网络节点供电,具有一定应用前景㊂参考文献:[1]㊀MITCHESONPD,YEATMANEM,RAOGK,etal.Energyharvestingfromhumanandmachinemotionforwirelesselec⁃tronicdevices[J].ProceedingsoftheIEEE,2008,96(9):1457-1486.[2]㊀王光庆,金文平,展永政,等.压电振动能量采集器的力电耦合模型及其功率优化[J].传感技术学报,2013,26(8):1092-1100.[3]㊀冯亚超,贺康,杨红丽,等.一种无线传感器网络数据收集协议的研究与优化[J].传感技术学报,2014,27(3):355-360.[4]㊀HIDEMIM,YOSHIKAZUT,RUPESHP,etal.Harvestingflow-inducedvibrationusingahighlyflexiblepiezoelectricenergydevice[J].Appliedoceanresearch,2017,68:39-52.[5]㊀AFSHARFARDA.Applicationofnonlinearmagneticvibroimpactvibrationsuppressorandenergyharvester[J].Me⁃chanicalSystemsandSignalProcessing,2018,98:371-381.[6]㊀JIAY,DUS,SESHIAAA.Micro-machinedcantilevers⁃on⁃membranetopologyforbroadbandvibrationenergyharvesting[J].Journalofmicro-mec-hanicsandmicro⁃engineering,2016,26(12):124007.[7]㊀佘引,温志渝,赵兴强,等.MEMS压电阵列振动能量采集器[J].传感技术学报,2014,27(8):1033-1037.[8]㊀TANGQ,LIXX.Two-stagewide⁃bandenergyharvesterdrivenbymultimodecoupledvibration[J].IEEE,2015,20(1):115-121.[9]㊀BERDYDF,VALENTINODJ,PEROULISD.Kineticener⁃gyharvestingfromhumanwalkingandrunningusingamag⁃neticlevitationenergyharvester[J].SensorsandActuatorA:Physical,2014,222(5):262-271.[10]㊀张端,张帅.闭合磁路电磁式低频振动能量收集装置[J].传感技术学报,2015,28(7):1091-1096.[11]㊀PEDCHENKOAV,PITTEB.Analyticaltoolsforinvestigatingstabilityandpowergenerationofelec-tromagneticvibrationenergyharvesters[J].IEEE,2016,21(2):717-726.[12]㊀SALAUDDINM,PARKJY.Designandexperimentofhu⁃manhandmotiondrivenelectromagneticenergyharvesterusingdualHalbachmagnetarray[J].SmartMaterialandStructures,2017,26(3):139-159.作者简介:张端(1972 ),副教授,研究方向为微传感器与金融大数据等㊂E⁃mail:dzhang@zjut.edu.cn陈挺任(1993 ),硕士,研究方向为微传感器㊁机器人等㊂E⁃mail:1191654247@qq.com(上接第27页)[7]㊀ZHANGL,GAOJB,ZHANGF,etal.Theapplicationofpar⁃allelcomputingtechnologyinthedataprocessingoftheim⁃agingspectrometer[J].ProceedingsofSPIE-TheInternationalSocietyforOpticalEngineering,2015,9521(2):193-216.[8]㊀GEELENB,TACKN,LAMBRECHTSA.Acompactsnapshotmultispectralimagerwithamonolithicallyintegratedper⁃pix⁃elfiltermosaic[C].InternationalSocietyforOpticsandPho⁃tonics,2014:661-674.[9]㊀TACKN.AtinyVIS-NIRsnapshotmultispectralcamera[J].ProceedingsofSPIE-TheInternationalSocietyforOpticalEngineering,2015,9374:937414-8.[10]㊀TZAGKARAKISG,CHARLEW,TSAKALIDESP.Datacompressionforsnapshotmosaichyperspectralimagesen⁃sors[C].SignalProcessingConference.IEEE,2016:1558-1562.[11]㊀PICHETTEJ,CHARLEW,LAMBRECHTSA.FastandcompactinternalscanningCMOS-basedhyperspectralcameratheSnapscan[C].ProceedingsofSPIE-TheInter⁃nationalSocietyforOpticalEngineering,2017,10110:1011014-10.[12]㊀解宁,丁毅,王欣,等.应用于高光谱成像的CMOS图像传感器[J].仪表技术与传感器,2015(7):7-9.[13]㊀王小朋,于平,齐心达,等.基于TMS320F2812的机载智能二次电源监控系统[J].仪表技术与传感器,2013(9):70-72.作者简介:庞高峰(1989 ),硕士,主要研究领域为基于FPGA的嵌入式系统设计㊂E⁃mail:464922827@qq.com通讯作者:赵志刚(1977 ),副教授,博士,主要研究领域为微型高光谱成像㊁数字化X射线成像等㊂E⁃mail:zhaozhigang127@163.com。
基于ZYNQ嵌入式小型化继电保护平台设计实现

和处理速度有很高的需求。
在设计中使用了两片Micron公司的DDR内存MT41K256M16HA-125-IT:E ,容量达到1G,与ARM核650MHz时钟匹配工作在 525MHz时钟速率。
经过Nucleus实时操作系统的测试,系统运行正常。
为保证继电保护设备数据的可靠性,DDR内存控制器可增加ECC功能,位宽降为16bit,内存容量降为512M。
2.1.2 I/O外设配置Zynq 的I/O引脚采用多路复用外设接口方式,PS侧的MIO共有54路I/O,可用Xilinx 提供的硬件设计工具Vivado把I/O功能灵活定义成MAC、UART、I2C、CAN、SDIO等平台中需要的外设接口,同时配置外设的工作时钟。
图2为继电保护平台在Zynq SoC芯片PS侧的功能模块示意图,其描述了外载荷,提高数据处理的实时性2.2.2 继电保护功能模块设计Zynq充分考虑到在将原来“处理器捷地移植到2.2.2.1 人机接口功能实现由于小型化保护装置采用就地化安装方式风吹日晒、级,无法安装液晶扩展液晶和键盘外设的智能保护装置能是通过安装在主控室或保护小室的就地化保护智能管理单元图1 小型化继电保护平台整体架构示意图图2 PS侧的功能模块示意图来实现装置的界面集中展示、配置管理、备份管理、在线监视和诊断功能,所有数据由就地化保护的网口通过光纤网络上传,抗干扰能力强。
2.2.2.2 常规互感器保护采样功能实现小型化保护的采样方式有两种:常规互感器采样通过电缆直接连接到小型化保护装置;电子式互感器SV和GOOSE共网通过光纤以太网接入小型化保护装置。
在常规互感器采样方式中,小型化保护平台使用两片AD7606共16路采样通道,采集电压、电流等模拟量供保护或测控使用。
AD7606芯片通过串行SPI 和FPGA连接,由FPGA保持采样时序和AD数据正确性,ARM核完成对FPGA采样功能的参数,如每周波采样点数、通道个数、预采样时刻等进行设置,FPGA通过中断方式通知ARM核收取采样数据。
《基于ZynQ嵌入式平台的工控通信单元设计与实现》
《基于ZynQ嵌入式平台的工控通信单元设计与实现》一、引言随着工业自动化和智能化程度的不断提高,工控系统在各行各业的应用日益广泛。
其中,通信单元作为工控系统的关键组成部分,其设计与实现的重要性不言而喻。
本文旨在介绍一种基于ZynQ嵌入式平台的工控通信单元的设计与实现方法,以提高工控系统的通信效率、稳定性和可靠性。
二、ZynQ嵌入式平台概述ZynQ嵌入式平台是一种基于Xilinx公司Zynq系列芯片的嵌入式系统,具有高性能、低功耗、可扩展性强等优点。
其硬件架构包括可编程逻辑部分(FPGA)和ARM处理器部分,可满足各种复杂的工业控制需求。
因此,选用ZynQ嵌入式平台作为工控通信单元的设计基础,具有良好的应用前景。
三、工控通信单元设计1. 需求分析在工控系统中,通信单元需要实现与各种传感器、执行器、上位机等设备的通信。
因此,设计时需考虑通信协议的多样性、通信速度、实时性、可靠性等因素。
同时,还需考虑系统的可扩展性和维护性。
2. 硬件设计硬件设计主要包括ZynQ嵌入式平台的选择、接口电路的设计、电源电路的设计等。
在选型时,需根据实际需求选择合适的ZynQ芯片型号。
接口电路设计时,需考虑与各种传感器、执行器、上位机等设备的接口类型和通信速率。
电源电路设计需保证系统的稳定供电。
3. 软件设计软件设计包括操作系统选择、通信协议实现、驱动程序编写等。
选用适合ZynQ嵌入式平台的操作系统,如Linux或RTOS。
根据实际需求选择合适的通信协议,如CAN、Modbus、TCP/IP 等,并实现相应的通信协议栈。
编写设备驱动程序,实现与各种传感器、执行器等设备的通信。
四、工控通信单元实现1. 通信协议的实现根据需求分析中确定的通信协议,编写相应的协议栈。
以CAN协议为例,需实现CAN控制器驱动、CAN消息编码解码等功能。
对于其他协议,如Modbus、TCP/IP等,同样需要实现相应的协议栈。
2. 设备驱动的编写根据硬件设计中的接口类型和通信速率,编写相应的设备驱动程序。
《基于ZynQ嵌入式平台的工控通信单元设计与实现》
《基于ZynQ嵌入式平台的工控通信单元设计与实现》一、引言随着工业自动化和智能化的快速发展,工控通信单元在工业生产中扮演着越来越重要的角色。
ZynQ嵌入式平台以其高性能、低功耗、可扩展性等优点,成为了工控通信单元设计的理想选择。
本文将详细介绍基于ZynQ嵌入式平台的工控通信单元设计与实现过程,以期为相关领域的研究和应用提供参考。
二、系统需求分析在设计和实现工控通信单元之前,首先需要对系统需求进行分析。
这部分主要包括确定系统的功能需求、性能需求以及可靠性需求等。
功能需求:工控通信单元需要具备数据采集、数据处理、数据传输和远程控制等功能。
此外,还需要支持多种通信协议,以满足不同工业设备的通信需求。
性能需求:系统需要具备高带宽、低延迟、高可靠性等性能特点,以确保工业生产过程中的数据传输和控制指令能够及时、准确地完成。
可靠性需求:由于工业生产环境的特殊性,系统需要具备较高的可靠性和稳定性,以应对各种复杂的工作环境。
三、硬件设计硬件设计是工控通信单元设计与实现的基础。
基于ZynQ嵌入式平台的硬件设计主要包括处理器模块、存储模块、通信接口模块等。
处理器模块:选用适合工业环境的ZynQ嵌入式处理器,具备高性能、低功耗、可扩展性等特点。
存储模块:根据系统需求,设计适当的内存和存储空间,以满足数据处理和存储的需求。
通信接口模块:根据实际需求,设计多种通信接口,如以太网接口、串口、USB接口等,以支持多种通信协议。
四、软件设计软件设计是工控通信单元的核心部分,主要包括操作系统选择、通信协议实现、数据处理与传输等。
操作系统选择:选用适合工业环境的嵌入式操作系统,如Linux或RTOS等。
通信协议实现:根据实际需求,实现多种通信协议,如TCP/IP、Modbus等。
同时,需要设计相应的协议栈和通信接口,以实现不同设备之间的数据交换。
数据处理与传输:设计高效的数据处理算法和传输策略,以确保数据能够及时、准确地传输到目标设备。
《面向ZYNQ嵌入式平台的EtherCAT通信协议栈设计与实现》

《面向ZYNQ嵌入式平台的EtherCAT通信协议栈设计与实现》一、引言随着工业自动化和智能制造的快速发展,EtherCAT (Ethernet for Control Automation Technology)通信协议以其高速、实时、高效率的特性,在嵌入式系统领域得到了广泛应用。
ZYNQ嵌入式平台作为一款高性能、低功耗的SoC(System on a Chip)芯片,为EtherCAT通信协议的实现提供了理想的硬件基础。
本文将详细介绍面向ZYNQ嵌入式平台的EtherCAT通信协议栈的设计与实现。
二、EtherCAT通信协议概述EtherCAT是一种基于以太网的实时通信协议,主要用于工业自动化控制领域。
它通过优化数据传输和同步机制,实现了高速、实时、高效率的通信。
EtherCAT协议栈包括物理层、数据链路层、网络层和应用层等多个层次,其中物理层和数据链路层由硬件实现,应用层则由软件实现。
三、ZYNQ嵌入式平台简介ZYNQ嵌入式平台是一款基于Xilinx FPGA和ARM Cortex-A9处理器的SoC芯片,具有高性能、低功耗、可扩展等优点。
其硬件架构包括可编程逻辑(FPGA)和处理器系统(PS),为EtherCAT通信协议的实现提供了良好的硬件基础。
四、EtherCAT通信协议栈设计在ZYNQ嵌入式平台上实现EtherCAT通信协议栈,需要从硬件和软件两个方面进行设计。
1. 硬件设计:(1)选择合适的以太网控制器芯片,与ZYNQ嵌入式平台的处理器系统(PS)进行连接,实现物理层和数据链路层的通信。
(2)设计可编程逻辑(FPGA)电路,实现EtherCAT协议的编码和解码功能。
2. 软件设计:(1)设计应用层软件,实现EtherCAT协议的报文处理、数据传输和同步等功能。
(2)设计驱动程序,与硬件进行交互,实现数据的收发和通信功能的控制。
五、EtherCAT通信协议栈实现在实现EtherCAT通信协议栈时,需要遵循以下步骤:1. 配置以太网控制器芯片的参数,如IP地址、子网掩码等,建立与ZYNQ嵌入式平台的连接。
《基于ZynQ嵌入式平台的工控通信单元设计与实现》

《基于ZynQ嵌入式平台的工控通信单元设计与实现》一、引言随着工业自动化与信息化的不断融合,工控系统在工业生产中的地位愈发重要。
作为工控系统的关键组成部分,工控通信单元承担着数据传输、信息交互等重要任务。
ZynQ嵌入式平台因其高性能、低功耗等优点,在工控通信单元的设计与实现中得到了广泛应用。
本文将详细介绍基于ZynQ嵌入式平台的工控通信单元设计与实现过程。
二、系统设计1. 硬件设计基于ZynQ嵌入式平台的工控通信单元硬件设计主要包括处理器、内存、接口电路等部分。
其中,处理器采用ZynQ系列芯片,具备高性能、低功耗的特点,可满足工控通信单元的实时性要求。
内存方面,选用适当的DDR存储器,以满足系统数据存储需求。
接口电路包括以太网接口、串口、USB接口等,用于实现与上位机、其他设备的数据传输与通信。
2. 软件设计软件设计部分主要包括操作系统、通信协议、数据处理等。
操作系统选用适用于嵌入式系统的实时操作系统,以保证系统的实时性和稳定性。
通信协议采用工业标准的通信协议,如Modbus、CAN等,以实现与其他设备的无缝连接。
数据处理部分负责数据的采集、处理、存储与传输,需确保数据的准确性和可靠性。
三、通信单元实现1. 通信接口实现根据工控系统的需求,实现以太网接口、串口、USB接口等通信接口。
以太网接口采用TCP/IP协议,实现网络数据的传输与接收。
串口和USB接口则用于与其他设备进行数据交换。
在接口实现过程中,需考虑数据的编码与解码、数据的传输速率等因素,以保证通信的稳定性和可靠性。
2. 数据处理与传输数据处理与传输是工控通信单元的核心功能。
在数据处理方面,需对采集到的数据进行预处理、滤波、计算等操作,以保证数据的准确性和可靠性。
在数据传输方面,需根据通信协议将数据封装成相应的数据帧,并通过通信接口发送给上位机或其他设备。
同时,还需考虑数据的实时性、传输速率等因素,以满足工控系统的需求。
四、系统测试与优化1. 系统测试在系统测试阶段,需对工控通信单元的各项功能进行测试,包括硬件性能测试、软件功能测试、通信性能测试等。
《面向ZYNQ嵌入式平台的EtherCAT通信协议栈设计与实现》
《面向ZYNQ嵌入式平台的EtherCAT通信协议栈设计与实现》一、引言随着工业自动化和智能制造的快速发展,EtherCAT (Ethernet for Control Automation Technology)通信协议因其高带宽、低延迟和易扩展的特性,在嵌入式系统中得到了广泛应用。
本文将详细介绍面向ZYNQ嵌入式平台的EtherCAT通信协议栈的设计与实现过程,通过对其体系结构和功能的全面描述,旨在为相关开发人员提供一定的参考。
二、EtherCAT协议概述EtherCAT是一种实时以太网通信协议,其核心思想是将实时控制任务的数据传输与标准以太网进行无缝集成。
EtherCAT协议通过分布式时钟和状态机机制,实现了对数据的高效、实时传输。
在嵌入式系统中,EtherCAT协议的应用能够显著提高系统的响应速度和数据处理能力。
三、ZYNQ嵌入式平台简介ZYNQ嵌入式平台是一款基于Xilinx FPGA和ARM Cortex-A9处理器的嵌入式系统。
其具有高性能、低功耗的特点,广泛应用于工业控制、医疗设备、智能交通等领域。
在ZYNQ平台上实现EtherCAT协议,能够更好地满足实时性、稳定性和可扩展性的需求。
四、EtherCAT通信协议栈设计1. 整体架构设计EtherCAT通信协议栈的设计包括物理层、数据链路层、网络层和应用层。
其中,物理层负责与硬件设备进行数据传输;数据链路层负责帧的封装与解析;网络层负责数据的路由与转发;应用层则提供丰富的接口供上层应用使用。
2. 详细设计(1)物理层设计:物理层采用标准的以太网物理层芯片,通过MII/GMII接口与ZYNQ平台进行连接。
(2)数据链路层设计:数据链路层负责将上层数据封装成EtherCAT帧,并实现帧的发送与接收。
此外,还需要实现分布式时钟同步机制,以保证数据的实时性。
(3)网络层设计:网络层主要负责数据的路由与转发。
在EtherCAT协议中,网络层需要实现SDO(Service Data Object)访问和PDO(Process Data Object)通信等功能。
《面向ZYNQ嵌入式平台的EtherCAT通信协议栈设计与实现》

《面向ZYNQ嵌入式平台的EtherCAT通信协议栈设计与实现》一、引言随着工业自动化和智能制造的快速发展,EtherCAT (Ethernet for Control Automation Technology)作为一种高效的实时以太网通信协议,逐渐成为了嵌入式控制系统中的重要选择。
而ZYNQ嵌入式平台凭借其出色的处理能力和可扩展性,被广泛用于各类复杂工业控制系统中。
因此,面向ZYNQ嵌入式平台的EtherCAT通信协议栈设计与实现,对于提升系统性能和稳定性具有重要意义。
二、EtherCAT协议概述EtherCAT是一种实时以太网通信协议,通过简单的数据结构传输,实现对数据的实时采集和高速传输。
EtherCAT的协议结构分为三层:网络层、过程层和应用层。
其中,网络层负责数据传输,过程层负责同步处理,应用层则提供了接口用于控制器的逻辑操作。
EtherCAT因其高速性和高效性,广泛应用于机器人、工业自动化等复杂系统。
三、ZYNQ嵌入式平台简介ZYNQ嵌入式平台是一种基于ARM架构和Xilinx FPGA技术的异构计算平台。
它集成了丰富的硬件资源,包括处理器、内存、外设等,可以满足各种复杂系统的需求。
ZYNQ嵌入式平台具备出色的性能和可扩展性,适用于各类工业控制系统。
四、EtherCAT通信协议栈设计面向ZYNQ嵌入式平台的EtherCAT通信协议栈设计,需要从硬件抽象层、网络层、过程层和应用层四个方面进行考虑。
1. 硬件抽象层设计:硬件抽象层负责与ZYNQ嵌入式平台的硬件资源进行交互。
该层需要提供对网络接口、处理器等硬件资源的访问和控制接口,以便于上层协议的实现。
2. 网络层设计:网络层是EtherCAT协议的核心部分,负责数据的传输。
在ZYNQ嵌入式平台上,网络层需要实现以太网帧的封装和解封装,以及数据的发送和接收功能。
3. 过程层设计:过程层负责数据的同步处理和周期性操作。
在ZYNQ嵌入式平台上,需要实现与控制器和其他设备的同步通信,以及实时数据的采集和处理功能。
基于Zynq芯片的SOC设计PPT课件
二、BOOT & configuration 阶段2(Stage 2):这个阶段其实就是用户自己的设计代码了,对应于FSBL ,这一阶段一般称之为SSBL(Second Stage Boot Loader)。 SSBL就是我们平常嵌入式系统开发中的Bootloader,主要负责将操作系统加 载到内存中,如果ARM上仅仅只是运行一个裸跑程序,该部分就可以省略;
[bootloader] zynq_fsbl.elf u-boot.elf [offset = 0x100000, load = 0x3000000] uImage [offset = 0x600000, load = 0x2A00000] devicetree.dtb [offset = 0x620000, load = 0x2000000] uramdisk.image.gz } 导入文件完成后生成mcs下载文件,并执行SDK Menu: Xilinx Tools>Program flash下载 注意:其中offset及load地址需要与zynq-common.h文件中一致
16
二、BOOT & configuration
系统启动的文件及版本信息 u-boot-xlnx-xilinx-v2013.4.zip arm_ramdisk.image.gz linux-xlnx-xilinx-v2013.4.tar.gz device-tree-xilinx-v2014.1
目的文件 u-boot.elf uImage.image.gz uImage devicetree.db
编译u-boot.elf
u-boot主要作进行硬件资源检测,将内核镜像、文件系统以及设备树加载到 相应的内存区域,在编译u-boot 前确保使用的zynq 外设与zynq_zed.h (文件路径:include/configs/zynq_zed.h)文件中的定义 一致, 本设计中选择UART0作为串口,因此需要修改zynq_zed.h文件中: CONFIG_ZYNQ_SERIAL_UART1为CONFIG_ZYNQ_SERIAL_UART0。
了解基于Zynq的嵌入式系统的研究
了解基于Zynq的嵌入式系统的研究针对传统嵌入式系统教学中的问题,提出将Zynq平台作为嵌入式系统的教学改革实践平台。
采用全新的课程体系结构,以工程实践训练为导向,驱动学生自主完成课程学习和实践活动。
教学实践表明,基于Zynq平台完成嵌入式系统设计是非常重要的。
它不仅巩固了学生的基础理论,而且培养了学生的工程实践能力,同时提高了学生整体嵌入式系统开发能力。
1 课程改革提出的背景随着大量的IP(Intellectual Property)组件被集成到SOC (All Programmable SOC)上,嵌入式系统设计越来越复杂。
同时,随着设计工具、设计方法的不断发展,嵌入式系统中软件和硬件的界限已经很模糊。
然而,传统的ARM嵌入式系统课程理论高度分散,结构不断更新。
学生学习起来难度较大,难以在短时间内形成一个简单明确的知识体系。
随着大数据、智能物联网时代的到来,未来的嵌入式系统“软件”和“硬件”将根据应用的要求,变成一个全面可编程的系统。
整个系统将在单芯片内按照特定的需求来设计硬件平台和软件应用。
这种全面可编程的实现过程,充分体现了软件串行执行和硬件逻辑并行执行的完美结合、软件和硬件的协同调试、软件和硬件的协同设计。
为了培养全面可编程的嵌入式工程师,本文结合我系开设“片上系统设计”的教学与实践经验,提出几点基于Zynq的嵌入式系统教学改革措施。
2 课程改革的具体措施2.1 创新的教学平台Zynq 是一款基于Xilinx Zynq-7000 AP SOC 平台的低成本开发板。
这款开发板可以实现基于Linux, Android, Windows or other OS/RTOS 操作系统的设计。
此外,开发板上丰富的扩展接口使得用户可以方便的访问可编程逻辑和处理器系统。
Zynq-7000器件是最新半导体技术、计算机技术和电子技术的一个结合体。
它将基于两个ARM Cortex-A9处理器的快速处理器系统与业界速度最快、最高级的28nm FPGA 架构相结合,搭配多个高速串行收发器以及包含两个每秒100 万次采样模数转换器的片上模拟处理模块。
《面向ZYNQ嵌入式平台的EtherCAT通信协议栈设计与实现》

《面向ZYNQ嵌入式平台的EtherCAT通信协议栈设计与实现》一、引言随着工业自动化与信息化的不断融合,EtherCAT(Ethernet for Control Automation Technology)作为一种高效的实时以太网通信协议,被广泛应用于工业控制系统中。
ZYNQ嵌入式平台因其高性能、低功耗和丰富的外设接口等优势,成为实现EtherCAT 通信的理想平台。
本文旨在详细阐述面向ZYNQ嵌入式平台的EtherCAT通信协议栈的设计与实现过程。
二、EtherCAT通信协议概述EtherCAT是一种基于以太网的实时通信协议,具有高带宽、低延迟和可扩展性强等特点。
该协议将传统工业现场总线的物理层和链路层与以太网的网络层结合,同时增加了主从节点之间的通信过程描述。
通过精确的时钟同步机制和分布式系统控制能力,EtherCAT协议在实时性和稳定性方面表现出色。
三、ZYNQ嵌入式平台简介ZYNQ嵌入式平台是一款高性能、低功耗的FPGA+ARM双核架构的处理器,具有丰富的外设接口和可编程逻辑。
该平台通过Xilinx ZYNQ-7000系列处理器实现软硬件的灵活配置,满足各种工业应用需求。
由于ZYNQ嵌入式平台的可扩展性和强大的处理能力,它被广泛应用于EtherCAT等工业控制网络中。
四、EtherCAT通信协议栈设计EtherCAT协议栈的设计主要分为网络层和应用层两个部分。
在网络层,主要完成数据的传输与同步,包括数据的封装和解封装等;在应用层,则主要完成设备的配置、状态监测等功能。
1. 网络层设计网络层的设计主要包括数据帧的封装和解封装过程。
在发送数据时,将数据按照EtherCAT协议的格式进行封装,并通过以太网发送出去;在接收数据时,对接收到的数据进行解封装,提取出原始数据。
此外,还需要设计精确的时钟同步机制,以保证主从节点之间的数据传输准确无误。
2. 应用层设计应用层的设计主要关注设备的配置和状态监测等功能。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ZYNQ-SoC I2C协议
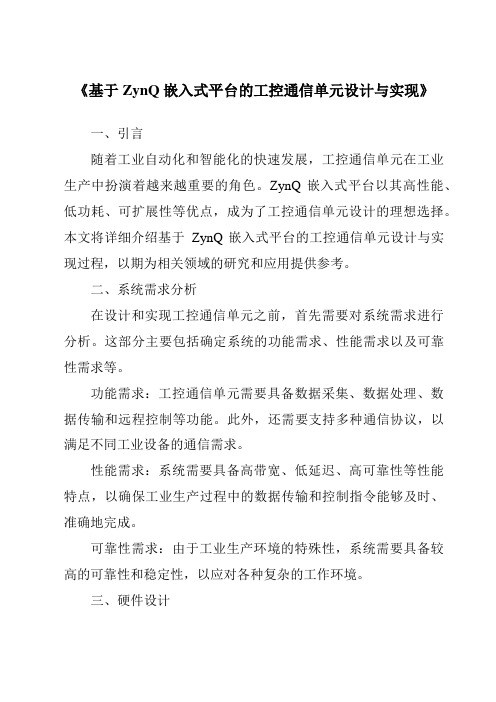
I2C-Bus
Acknowledge and Not Acknowledge
The I2C specification says: Data transfer with acknowledge is obligatory. The receiver must pull down the SDA line during the acknowledge clock pulse so that it remains stable LOW during the HIGH period of this clock pulse.
ZYNQ-SoC I2C协议
I2C-Bus
START and STOP Conditions
Question: What is wrong with this figure?
ZYNQ-SoC I2C协议
I2C-Bus
START and STOP Conditions
Start Condition - a HIGH to LOW transition on the SDA line while SCL is HIGH Stop Condition - a LOW to HIGH transition on the SDA line while Plus
0 to 1000
High Speed Mode
0 to 1700
0 to 3400
550
400
100
120
160
80
10
10
10
0.7xVDD
VVOILL GND
0.4 V @ 3 mA Sink Current 0.4 V @ 20 mA Sink Current (Fm+)
– serial data (SDA) – serial clock (SCL) Has become a worldwide industry standard and used by all major IC manufacturers Multi-master capable bus with arbitration feature Master-Slave communication; two-device only communication (generally) Each IC on the bus is identified by its own address code The slave can operate as a – receiver (slave – receiver) – transmitter (slave – transmitter)
0.3xVDD
ZYNQ-SoC
I2C-Bus
Hardware architecture
I2C协议
Pull-up resistors Typical value 2 k to 10 k
SCL
Open Drain structure (or Open Collector) Pull-down transistor required on SDA but not on SCL
ZYNQ-SoC I2C协议
I2C-Bus
Key Parameters
VDD VIH
Standard Mode
Bit Rate (kb/s) Max Load
(pF) Rise time
(ns) Noise filter (ns)
0 to 100 400
1000 -
Rise Time
Fast Mode 0 to 400
However, there are a few scenarios where there is not an acknowledge (SDA staying HIGH). Which ones?
1. A receiver with the address is not present in the I2C bus
嵌入式体系结构基于ZYNQ 第六讲
ZYNQ-SoC I2C协议与I2C控制器
I2C协议 开发板上的I2C设备 Zynq的I2C控制器 I2C控制器的编程
ZYNQ-SoC I2C协议
I²C-bus = Inter-Integrated Circuit bus Bus developed by Philips in the early 80’s Simple bi-directional 2-wire bus:
2. The receiver is performing real-time tasks and it cannot process the received I2C information
3. The receiver is the master and wants to take control of SDA line again in order to generate a STOP command. The slave transmitter MUST then release the SDA line when it sees the NACK so the master can send the STOP command.
ZYNQ-SoC
I2C-Bus
Data Transfer
I2C协议
Data
Acknowledge
During data transfer, SDA must be stable when SCL is High Each byte has to be followed by an acknowledge bit Number of bytes transmitted per transfer is unrestricted If a slave can’t receive or transmit another complete byte of data, it can hold the