基于单片机的静力压桩机
ZYC800静力压装机桩基施工方案

ZYC800静力压装机桩基施工方案一、施工前准备1.地质勘察:在施工前,必须进行地质勘察以确定地下情况,包括土质、水位等。
这将有助于选择适当的施工参数和作出正确的设计决策。
2.设备检查:在施工前,必须对ZYC800静力压装机进行全面检查,确保设备的正常运行。
包括检查液压系统、电气系统、机械系统等,如有损坏或异常,必须及时修复。
3.施工方案制定:根据地质勘察结果和工程要求,制定详细的施工方案。
包括桩基类型、桩径、桩长、压入深度等参数的确定。
二、施工流程1.施工准备:在施工现场进行布置,包括设立施工场地、搭建工棚、设置安全警示标志等。
同时,需要根据工程要求准备好所需的桩基材料和附件。
2.桩基准备:根据工程要求,在地面上进行桩基标高的划定和放线。
同时,清理桩基施工区域,确保工作区域干净整洁。
3.安装设备:将ZYC800静力压装机安装在施工区域,确保设备稳定运行。
同时,连接液压系统和电气系统,进行设备的调试和测试。
4.桩基压入:根据施工方案的要求,将桩基材料放置在合适的位置。
然后,启动静力压装机,将桩基材料以一定的压力和速度压入地面。
在压入过程中,需要不断调整压力和速度,确保桩基材料的稳定性和质量。
5.桩基质量检查:在桩基压入完成后,进行桩基质量检查。
包括使用无损检测方法检测桩基的质量和可能存在的缺陷。
6.施工记录和报告:在施工过程中,及时记录施工参数、质量检查结果等,并制作详细的施工报告。
三、注意事项1.安全操作:施工过程中,必须严格遵守安全操作规程,确保人员安全。
包括佩戴安全帽、防护眼镜等个人防护设备,避免机械设备故障和意外伤害。
2.施工参数控制:对于不同的地质条件和工程要求,需要合理调整施工参数。
包括压力、速度、时间等,以确保桩基质量和施工效率。
3.设备维护:定期对ZYC800静力压装机进行维护保养,包括液压系统的清洗和油品更换、电气系统的检查等。
4.桩基质量监测:在施工过程中,需要进行桩基质量的监测和测试。
静力压桩工程测量技术方案

静力压桩工程测量技术方案一、技术方案概述静力压桩工程是一种利用静止状态下的外力(静载)测试桩身变形和抗力性能的一种试验方法。
随着工程技术的持续发展,静力压桩工程在工程领域中应用越来越广泛。
为了确保静力压桩工程的准确性和可靠性,必须对其进行规范的测量和监测。
本技术方案旨在提出一套完整的静力压桩工程测量技术方案,以确保静力压桩工程的可靠性和准确性。
二、测量设备1. 静力压桩试验仪器:用于对桩身变形和抗力性能进行测试。
主要包括静力桩载荷传感器、变形传感器、位移传感器、温度传感器等。
2. GPS定位仪:用于对桩基位置进行精准测量和定位。
3. 激光测距仪:用于测量桩身的长度和直径。
4. 数据采集器:用于对上述测量数据进行采集和存储。
5. 电脑和软件:用于对采集的数据进行处理和分析。
三、测量工程建立1. 测量范围确定:根据静力压桩工程实际情况,确定测量的范围和区域。
2. 基准建立:利用GPS定位仪对测量范围内的基准点进行精确定位和标定,以建立测量的基准。
3. 试验仪器安装:按照静力压桩试验的要求,将各种试验仪器进行精准安装和校准,以确保试验的准确性和可靠性。
4. 数据采集配置:进行数据采集器的配置,对试验中产生的各种数据进行采集和存储。
5. 实时监测:对试验中的各项参数进行实时监测,及时对可能出现的问题进行处理和调整。
四、测量方法1. 桩基位置测量:利用GPS定位仪对桩基位置进行精确定位和测量。
2. 桩身长度测量:利用激光测距仪对桩身长度进行测量。
3. 桩身直径测量:利用激光测距仪对桩身直径进行测量。
4. 桩身变形测量:利用变形传感器对桩身的变形进行监测和测量。
5. 桩身抗力测试:利用静力桩载荷传感器对桩身的抗力进行测试和记录。
6. 数据分析:利用电脑和软件对采集的数据进行处理和分析,得出相应的结论和建议。
五、测量结果处理1. 数据分析:利用电脑和软件对采集的数据进行处理和分析,得出相应的结论和建议。
2. 结果评估:对测量结果进行评估和分析,得出桩身的变形和抗力性能情况。
ZYC800静压桩机安、拆方案

某某项目静压桩机安、拆方案编制单位:江苏森桌基础有限公司ZYC800型静压桩机安、拆方案一、方案选择:根据本工程特点,选用ZYC800型静力压桩机为本工程压桩施工机械。
ZYC800型液压静力压桩机技术参数:1.压桩能力:一对压桩缸工作最大压桩力: 300tf压桩速度(快速档): 4.2m/min两对缸同时工作最大压桩力: 600压桩速度(慢速): 0.8m/min一次压桩行程: 1.8m2.行走能力每次行程:纵向: 3.6m横向: 0.6m每次转角:11°行走速度:前进: 4.2m/min后退: 8.3m/min左移: 4.2m/min右移: 8.3m/min3.升降行程:1.1m4.用桩尺寸:管桩:最大600方桩: 0.35*0.35m²----0.45*0.45 m²单桩长度: a)≥3.0m,≤15m(中桩)b) ≥3.0m,≤10m(边桩)5.液压系统额定压力: 25(18)MPa额定流量: 354(115)L/min括号外的数字为主机部分,括号中的为起重机部分。
6.电气系统:功率: 37X3+30=141kw电压: 380V电流: 70.4X3+56.8=268A7.重量:总重: 600t最大部件: 66t8.外形尺寸:工作厂*工作宽*运输高=13000*8040*3040mm9.边桩距离: 1.38m角桩距离: 2.8m10.接地比压:长船: 12.96tf/m²短船: 16.6tf/m²11.起重机:最大起重量: 16tf最大起升速度: 11m/min最大回转速度: 3r/min二、施工方法1、施工条件。
目前现场场地已经基本平整,三通一平已经完成,具备施工条件。
2、施工部署。
1)、施工安排。
根据现场情况,工期以及甲方要求。
我公司调进一台JVY600H型液压静力压桩机,桩机配备四台30kw交流电焊机进行接桩工作。
3、安装步骤:1)、先将长船、短船安放自定位置,将机身底盘油缸与长船、短船滚轮座地盘连接。
静压桩承载力的实时测试系统的研制
静压桩下沉 时终 止压桩的控制 条件 尚未得到很好
的解 决 。在 施工 中, 技术 人 员常 常将 终 压 力 的 一 半
则仍 由夹桩缸将桩夹紧 , 主压缸提起夹桩箱即可 。
认作桩 的承载力, 并以此 作为终止压桩 的条件。实
践证 明, 桩 压 入 不 同的 地基 形 成 的 承 载 力 是 不 同 的 , 如 , 压 入饱 和 软粘 土 , 周 围 的 土经 过 半年 例 桩 桩 固 结后 , 剪 强 度较 高 ; 压 入 灵 敏 的 粘 土 或 超 压 抗 桩 密硬型粘土 中, 最终 的 抗剪 强度 较 低 ; 压 入 沙 土 桩 时土被 扰动 , 抗剪 强度很 低 。因此 , 何实 时测试 桩 如 的承载 力 对保 证 工程 质量 具有 现 实意 义 。 本 测 试 系 统 主 要 是 为 Z J系 列 液 压 静 力 压 桩 Y 机 配 套 开 发 的 , 自动 识 别土 层 , 时预 测 静 压 桩 能 实 的承 载 力 , 而 实 现 压 桩 作业 的 计算 机 辅助 管理 , 从 充分 发 挥静 压 桩 的优 越 性 。
2 数 据 采集模 块 . 2
压桩时, 首先 主压缸将夹 桩箱提 到最高位置 , 由夹 桩箱 上 的夹 桩 缸将 桩 夹 紧 ,主 压 缸伸 长 并产
生 强 大 的 压 力将 桩 压入 地 基 ,直 到 主 压 缸 的 个 行程 结 束 , 桩 缸松 桩缩 回 。接 着 主 压缸 再 次 缩 回 夹
的实 时 性 要 求 。数 据 存 储 器 选 用 1片 静 态 R M A (24, 序 存 储 器 选 用 1片 E R M(74。通 过 66 )程 P O 26) 85 25扩 充 了 3个 8位 的并 行 口, 为打 印接 口。 作 键 盘 和 显示 器 由 87 2 9芯 片管 理 。
基于51单片机的桩机记录仪的设计

基于单片机的桩机记录仪的设计物理与机电工程学院电子信息工程专业学号:200402101 姓名:罗丽娟指导老师:王祝华【摘要】该系统分为硬件和软件两部分。
硬件部分选用的硬件有:南京伟福公司研发的E51/S仿真器支持C语言程序的调试(其软件开发环境是WAVE6000),再加上单片机处理器(89C52)、键盘、LED显示器、单片机的串行接口电路及微台式汉字微型式打印机,最终实现基于单片机C51的小票打印系统。
该系统可以用于记录建筑工地上打浆机的各种数据。
软件部分则详细论述了按键部分,显示部分,打印部分的程序,并对设计过程中遇到的问题提出了较详细的解决方法。
系统最后实现的功能是逐项输入各项打粉数据,且输入每项数据时,LED前两位显示提示符,后四位显示输入的数据,并且具有简单的编辑功能,如向前删除一位,取消当行输入,总复位,行打印和全部打印。
【关键词】单片机; C51;键盘; LED显示;打印机;串行通信Based on SCM pile driver recorder designPhysics and Electrical and Mechanical Engineering CollegeElectronic and Information EngineeringXue:200402101 name:luo li juan Instructor:wang zhuhuaAbstractThe system is divided into two parts, which including the software part and hardware part. The part of the hardware it will use is: E51/S simulator which is developed by Nanjing Wave company and can supports C language debugging procedures(software development environment is WA VE 6000), plus MCU processor(89C52),keyboard, LED display ,SCM serial interface circuit and micro-micro-Chinese desktop printers, based on the small C51 microcontroller votes printing system. The system can be used to record printing engine builders of the data. And the part of software is particular discuss the key-press part, display part, print part of the process, moreover advance a more detailed solutions for the problems encountered in the design process. The system finally realization of the function is input data one by one, and when input each data, LED prompt the two previous shows, shows that after four input data, and has simple editing function, such as a forward delete, cancel the currently input row, overall restoration, Full Print and Row Print.Key words: MCU; C51; Keyboard; LED Display; Print; Serial Communication;目录1 绪论 (4)1.1 课题背景 (4)1.2 研究的目的、意义 (4)1.3 本设计所要做的工作 (4)2 系统总体设计方案 (5)2.1 桩机记录仪的设计要求 (5)2.2 桩机记录仪组成及结构 (5)2.2.1 记录仪系统组成框架 (5)2.2.2 记录仪的系统结构 (5)2.3 系统功能设计 (6)2.4 总结 (6)3 硬件设计 (6)3.1 键盘控制电路 (7)3.1.1 键盘接口技术 (7)3.2 LED显示电路 (8)3.2.1 六位LED显示器 (8)3.3 微型打印芯片驱动电路 (9)3.3.1 微型打印机 (9)3.4 系统的硬件电路原理图 (9)3.4.1 系统各硬件电路的连接 (10)3.4.1.1 晶振 (10)3.4.1.2 键盘 (10)3.4.1.3 LED (10)3.4.1.4 打印机 (10)3.5 总结 (11)4 软件设计 (11)4.1 软件开发工具的选择 (11)4.2 软件总流程图 (12)4.3 键盘控制模块设计 (12)4.3.1 键盘扫描程序 (13)4.3.2 确定键值 (14)4.4 LED显示控制模块设计 (15)4.4.1 显示函数 (15)4.4.2 数据存储缓冲 (15)4.5 打印输出模块设计 (16)4.5.1 与串行口有关的SFR (16)4.5.2 串行口的初始化 (16)4.5.3 关于TpuP打印机 (17)4.6 其它相关函数 (17)4.6.1 总清零函数 (17)4.6.2 计算总的重量 (17)4.7总结 (18)5 总结和心得 (18)参考文献 (19)致谢 (19)英文摘要 (20)附录Ⅰ:源程序 (21)附录Ⅱ:系统电路总图 (37)附录Ⅲ:TPμP打印机常用标准ASCII码 (38)附录Ⅳ:TPμP打印命令代码和功能 (39)1 绪论1.1 课题背景建筑工地上的打浆机在施工过程中要记录各种数据,传统的人工观测、记录、制表的方法,不仅施工安全得不到保障,质量也受到影响。
静力压桩机原理

静力压桩机原理静力压桩机原理是一种常用于建筑施工中的桩基施工设备。
它利用静态压力将桩预制体或者钢管桩一点点地压入土层中,从而形成稳定的基础支撑。
这种桩机的原理简洁明确,运作稳定可靠,因此受到了广泛应用。
静力压桩机的原理基于两个重要的因素:静态压力和桩体自身重量。
首先,压桩机通过一系列的液压缸和油缸提供静态压力。
这种压力通常是调节的,并且能够根据施工的需求进行灵活调整。
其次,桩体自身的重量也是压桩的一个关键因素。
在压桩过程中,压桩机通过自身的重量施加压力,将桩体逐渐压入土层中。
具体来说,静力压桩机的工作流程如下:首先,将压桩机放置在需要施工的位置上,并固定好基座。
接下来,将预制好的桩或者钢管桩插入到压桩机的活动部位上。
然后,通过液压系统提供静态压力,将压头紧贴在桩顶上。
当施加足够的压力之后,压桩机开始施加自身的重量,将桩体逐渐压入土层。
这个过程通常需要多次施加压力和移动压桩机,直到桩顶达到预定的标高为止。
静力压桩机的原理有许多优点和适用性。
首先,相比于其他类型的桩机,静力压桩机在施工过程中产生的振动和噪音相对较小,对周边环境的干扰较小。
其次,静力压桩机的稳定性较高,可以确保桩体的质量和稳定性。
此外,它可以适应不同类型和性质的土层,因此适用范围广泛。
在实际操作中,使用静力压桩机需要注意一些关键细节。
首先,施工前需要进行充分的场地勘察和土壤测试,以确定桩的类型和长度,确保其能够承受预定的荷载要求。
其次,施工过程中需要严格控制桩的垂直度和沉桩速度,避免出现偏斜或者速度过快的情况。
最后,施工结束后需要对桩的质量进行检测和评估,确保其满足设计要求。
总之,静力压桩机是一种在建筑施工中常用的桩基施工设备,其原理简单明了。
通过静态压力和桩体自身重量的作用,实现桩的逐级压入土层,从而形成稳定的基础支撑。
在实际应用中,需要充分了解静力压桩机的原理和操作要点,并根据具体情况进行施工调整和控制。
这样才能保证施工质量和安全,并且达到预期的效果。
静力压桩机工作原理
静力压桩机工作原理
静力压桩机是一种常用于桥梁、建筑物、码头等工程施工中的桩基设备,其工作原理如下:
1. 桩体准备:首先需要准备好需要安装的桩体,通常是混凝土或钢筋混凝土等材料。
2. 预埋基底:在桩体需要安装的位置先进行挖掘,并且进行基底的预埋,以确保桩体能够稳定地安装在基底之上。
3. 安装支架:将静力压桩机的支架放置在桩体上方,并保证支架与桩体之间有良好的连接。
4. 推动桩体:通过静力压桩机的油缸进行推动,使得桩体逐渐进入地下。
在这个过程中,静力压桩机会通过施加适当的推力和压力,确保桩体能够顺利进入土壤中。
5. 顶部控制:静力压桩机在推动桩体的同时,通过顶部控制桩体的位置和方向,确保桩体进入地下的深度和角度符合设计要求。
6. 固定桩体:当桩体推入到设计深度后,需要进行固定,一般使用混凝土灌注的方式或者使用螺旋桩等辅助固定设备。
总之,静力压桩机通过施加推力和压力,将桩体推入地下,确保桩基能够达到一定的深度和稳定性。
这种工作原理能够有效地提高施工效率和施工质量,广泛应用于各类工程中。
静力压桩机的工作原理和构造

静力压桩机的工作原理和构造
静力压桩机是一种用于桥梁、高层建筑、码头等工程中进行桩基施工的机器设备。
其主要工作原理是利用油缸的液压能力,通过推动或拉动活塞,使钢管或钢筋桩靠近或深入地层,以实现桩基施工的目的。
静力压桩机的构造主要由液压系统、钢管或钢筋桩、顶板及平台等组成。
液压系统是静力压桩机的核心部分,主要由油箱、泵组、气压罐、液压管路、阀组等组成。
液压系统将液压油经泵组压力输送到油缸内,驱动活塞进行上下运动,从而实现桩基的压制和沉桩。
钢管或钢筋桩也是静力压桩机的重要组成部分。
钢管桩由钢管制作而成,钢筋桩由钢筋和钢筋筋套组成,两者的共同点是具有强度高、耐腐蚀、使用寿命长的优点。
钢管或钢筋桩的长度和直径根据工程需要进行选择,一般长度为10~20米,直径为350~800毫米。
顶板和平台是用于支撑和固定钢管或钢筋桩的部分。
顶板是一块具有高强度的钢板,可以承受静力压桩机的压力,平台是用于支撑人员和设备的平台。
总之,静力压桩机是一种高效、安全、稳定的桩基施工机器设备,在工程建设中具有重要的应用价值。
- 1 -。
钢板桩静力压桩机的工作原理
钢板桩静力压桩机的工作原理1.引言1.1 概述概述部分的内容可以介绍钢板桩静力压桩机的背景和作用。
以下是一个示例:钢板桩静力压桩机是一种常用的桩基施工设备,广泛应用于建筑工程、交通工程、水利工程等领域。
它的主要作用是将钢板桩垂直压入土层中,用来增加土壤的承载能力和稳定性。
在建筑工程中,地基的稳定性是确保建筑物安全可靠的关键因素之一。
而钢板桩静力压桩机的出现就为建筑工程中的地基处理提供了一种高效、经济的解决方案。
钢板桩静力压桩机利用其强大的推力,通过将钢板桩逐级推入土层中,使其与土层紧密结合。
通过这种方式,不仅能够提高土壤的承载能力,还能有效地改善土地的稳定性。
此外,钢板桩静力压桩机还可以使地基与地面保持水平,增加建筑物的稳定性和抗震能力。
钢板桩静力压桩机有着多种规格和型号,根据不同的工程需求和地质条件,可以选择不同的机型和桩型。
它的工作原理简单而有效,是一种成熟可靠的施工设备。
本文将详细介绍钢板桩静力压桩机的定义与分类,以及其工作原理。
通过对这些内容的了解,读者可以更好地理解钢板桩静力压桩机的工作原理和应用,从而更好地应用于实际工程中。
接下来的章节将详细介绍这些内容,以便读者能够全面了解钢板桩静力压桩机的工作原理和应用。
1.2 文章结构本文将首先介绍钢板桩静力压桩机的概述,包括其定义和分类,然后详细解析该设备的工作原理。
在最后的结论中,将对文章进行总结并展望未来该领域的发展趋势。
本文总共分为三个部分。
第一部分是引言,包括概述、文章结构以及目的。
引言部分旨在简要介绍本文的主要内容,并概括阐述本文的结构和目的。
第二部分是文章的正文部分。
首先将介绍钢板桩静力压桩机的定义与分类,详细阐述不同类型的钢板桩静力压桩机的特点和区别。
接下来,将重点探讨钢板桩静力压桩机的工作原理,包括其操作步骤、工作过程和关键要素。
通过对工作原理的深入分析,读者将能够更好地理解这一设备的工作机制和应用领域。
最后一部分是结论部分。
静力压桩机操作规程
静力压桩机操作规程
《静力压桩机操作规程》
一、操作人员要求:
1. 操作人员必须接受相关培训,并持有相关资格证书。
2. 操作人员必须穿戴个人防护装备,包括安全帽、安全鞋、手套和耳塞等。
3. 操作人员必须了解静力压桩机的基本原理和操作流程,并按照规程进行操作。
二、设备检查:
1. 在使用静力压桩机之前,操作人员需要对设备进行全面检查,包括润滑油、液压油、电气系统和各个操作部件等。
2. 确保设备的所有安全装置完好,并且可以正常工作。
三、压桩操作:
1. 在进行压桩作业之前,操作人员需要对工地进行检查,清理障碍物,并确保不会影响静力压桩机的操作。
2. 按照规程对压桩机进行调节,包括调整工作压力和行程等参数。
3. 在进行压桩操作时,操作人员需要注意周围的安全情况,确保没有人员靠近作业区域。
4. 定期检查设备的工作状态,如有异常情况立即停机,及时处理。
四、设备维护:
1. 在使用静力压桩机之后,操作人员需要对设备进行清洁和保
养,并记好台账,包括设备的工作时间和维护情况等。
2. 定期进行设备的维护保养,包括更换润滑油、定期检查电气系统和液压系统等。
以上就是《静力压桩机操作规程》的基本要求,操作人员需要严格遵守规程,确保设备的安全操作和长期稳定工作。
YZY400静力压桩机设计开发-大身结构有限元应力、强度分析(有设计图纸)
YZY400静力压桩机设计开发-大身结构有限元应力、强度分析(有设计图纸)1 绪论1.1液压静力压桩机的发展概况纵观液压静力压桩机的发展过程,大致可将其分为两个阶段:第一阶段,从20世纪70年代后期到90年代中期,国内先后研制了几种压桩机,并逐步形成系列产品进入市场。
其中具有代表性的两个系列产品是武汉市建筑工程机械厂生产的YZY系列液压静力压桩机和利用中南大学(原中南工业大学)智能机械研究所的专利技术生产的ZYJ系列液压静力压桩机。
在这个阶段主要解决了这种桩机的设计理论基础、动力配置和系统设计问题,满足了静压桩的基本功能。
但就整体来说,其主要特征是桩机压桩力不大,实际使用的最大压桩力不足4000kN,绝大部分的压桩力为1 600~2400kN;功能单一,主要应用于施工现场预制的截面尺寸为(300 mm X 300 mm)~(400mm X 400mm)的钢筋混凝土方桩(实心件)的正常中位压桩,单桩设计承载力标准值在1400kN以下。
而预应力管桩和高强度预应力管桩主要是通过锤击设备如柴油锤等进行打入施工。
进入20世纪90年代中期以后,液压静力压桩机进入第二发展阶段。
由于1994年底在珠海利用液压静力压桩机将直径500 mm的预应力管桩压入强风化岩获得成功,实现了静压桩施工技术的历史性突破,从此拓宽了静压桩的应用范围,也使预应力管桩在城市和居民住宅区内的应用找到了一条新路子。
一方面,实现了静压桩的单桩承载力向大吨位方向的快速发展,与此同时,市场对大吨位桩机的需求不断增大,而且要求越来越强烈;另一方面,由于施工范围的不断扩大,对桩机功能的要求也日益增多,出现了工程施工中许多必须解决的实际问题。
这个阶段的桩机品种显著增加,系列化不断完善,生产厂家也急剧增多,至今在全国约有30个制造厂。
其中湖南山河智能机械股份有限公司的生产能力最大,2003年共生产125台,占全国年总产量的30%~40%。
目前的生产能力达到每月15台,年生产能力在180台左右,已形成压桩力为800~10000kN的完整的产品系列,生产的最大吨位机型为ZYJl000。
【CN210288388U】一种全自动静力压桩机【专利】

(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201920624385.7(22)申请日 2019.05.05(73)专利权人 江苏楼翔建设有限公司地址 215008 江苏省苏州市总官堂路555号苏尚新地生活广场1幢1132室(72)发明人 汪楼生 (74)专利代理机构 天津展誉专利代理有限公司12221代理人 何龙其(51)Int.Cl.E02D 7/20(2006.01)E02D 13/06(2006.01)(ESM)同样的发明创造已同日申请发明专利(54)实用新型名称一种全自动静力压桩机(57)摘要一种全自动静力压桩机包括平台、设置于所述平台上的吊机、送料机构以及焊接机构。
本实用新型可以在垂直方向调节焊接头的位置,同时可以两次在桩身径向方向调节焊接位置,使其可以适用各种直径的桩身,同时桩身可以代替配重块,而且设置有两个送料机构,一方面可以使重力分配均匀,另一方面,可以做到边压桩边加料,最后自动化程度高,能对不同直径的桩身进行自适应夹持,而且能监控桩身的压入深度,使其使用范围广,结构合理,适宜推广使用。
权利要求书1页 说明书4页 附图3页CN 210288388 U 2020.04.10C N 210288388U权 利 要 求 书1/1页CN 210288388 U1.一种全自动静力压桩机,包括平台以及设置于所述平台上的吊机,其特征在于:所述平台上还设置有送料机构以及焊接机构,所述送料机构包括桩箱、设置于所述桩箱下方的移动板、设置于所述移动板上方的气缸、位于所述移动板下方的旋转辊以及设置于所述桩箱内的若干挡板,所述焊接机构包括轨道、设置于所述轨道上方的若干第二电缸、设置于所述轨道相对面的若干移动块、设置于所述移动块上的调节块、设置于所述调节块上的第三电缸、设置于所述第三电缸上的夹持块以及设置于所述夹持块端部的焊接头,若干个所述桩箱串联为一组,所述移动板与所述桩箱滑动接触,所述气缸与外端的所述桩箱连接,所述气缸与所述移动板螺栓连接,所述旋转辊与所述平台枢轴连接,所述挡板设置有两个,所述挡板与所述桩箱固定连接,所述第二电缸设置有两个,所述第二电缸与所述平台螺栓连接,所述第二电缸与所述轨道连接,所述移动块与所述轨道卡接,所述移动块设置有两个,所述调节块设置有两个,所述调节块与所述移动块卡接,所述第三电缸设置有两个,所述第三电缸与所述调节块卡接,所述夹持块设置有两个,所述夹持块与所述第三电缸连接,所述焊接头设置有两个,所述焊接头与所述夹持块螺栓连接。
静力压桩机

1引言静压法施工是通过静力压桩机以压桩机自重及桩架上的配重作反力将预制桩压入土中的一种沉桩工艺。
早在20世纪50年代初,我国沿海地区就开始采用静力压桩法。
到80年代,随着压桩机械的发展和环保意识的增强得到了进一步推广。
至90年代,压桩机实现系列化,且最大压桩力为6800KN的压桩机已问世,它既能施压预制方桩,也可施压预应力管桩。
适用的建筑物已不仅是多层和中高层,也可以是20层及以上的高层建筑及大型构筑物。
目前我国湖北、广东、上海、江苏、浙江、福建等省市都有应用,尤以上海、南京、广州及珠江三角洲应用较多。
2静压法沉桩机理静压预制桩主要应用于软土地基。
在沉桩过程中,桩尖直接使土体产生冲切破坏,伴随或先发生沿桩身土体的直接剪切破坏。
孔隙水受此冲剪挤压作用形成不均匀水头,产生超孔隙水压力,扰动了土体结构,使桩周约一倍桩径的一部分土体抗剪强度降低,发生严重软化(粘性土)或稠化(粉土、砂土),出现土重塑现象,从而可容易地连续将静压桩送入很深的地基土层中。
压桩过程中如发生停顿,一部分孔隙水压力会消失,桩周土会发生径向固结现象,使土体密实度增加,桩周的侧壁摩阻力也增长,尤其是扰动重塑的桩端土体强度得到恢复,致使桩端阻力增长较大,停顿时间越长扰动土体强度恢复增长越多。
因此,静压沉桩不宜中途停顿,必须接桩停留时,宜考虑浅层接桩,还应尽量避开在好土层深度处停留接桩。
静压桩是挤土桩,压入过程中会导致桩周围土的密度增加,其挤土效应取决于桩截面的几何形状、桩间距以及土层的性能。
3 静压法适用范围静压法通常适用于高压缩性粘土层或砂性较轻的软粘土层,当桩须贯穿有一定厚度的砂性土夹层时,必须根据桩机的压桩力与终压力及土层的形状、厚度、密度、上下土层的力学指标、桩型、桩的构造、强度、桩截面规格大小与布桩形式、地下水位高低以及终压前的稳压时间与稳压次数等综合考虑其适用性。
压桩力大于4000kN的压桩机,可穿越5~6m厚的中密、密实砂层。
静力压桩机的控制系统分析

静力压桩机的控制系统分析摘要:介绍了一种基于PLC 的压桩机电液自动调平系统。
实现静力压桩机机身的自动调平,提高了调平精度, 而且提高了桩的垂直度和压桩质量, 从而减轻了油缸的损坏程度。
关键词:静力压桩机;控制系统; PLC1 控制系统的功能与组成由于压桩机的工作环境恶劣、振动大、油液污染重等缺点, 而PLC 具有抗干扰强, 能在恶劣的环境下工作, 故采用PLC 进行控制。
该控制系统主要完成如下的控制功能:1) 对机身平面进行水平微调。
该功能可缩短压桩前机身水平的调整时间, 并能进一步提高待压桩的垂直精度及压桩质量。
2) 能够进行机身水平升降。
该功能可以减轻手工操作不当对支腿油缸造成的损坏。
3) 在第一根预制桩的第一个压桩行程中( 当第一根预制桩压入后, 则不能再左右移动进行垂直度的调整) 对机身进行实时监控并保持其水平, 即使当已压入土中的预制桩重新出现倾斜时, 该功能可保证在不停止压入的情况下进行垂直度的调整, 即边压入边调整。
为实现以上功能,同时考虑到客观实际情况及经济上的因素,决定本控制系统的硬件采用以下组成方案:PLC,角位移传感器,电液换向阀,支腿油缸。
其中PLC 采用德国SIEMENS公司生产的SIMATIC S7—200可编程控制器; CPU 模块选用CPU222/DC/DC/DC;输入采用EM231模块,输出采用EM222数字量输出模块。
水平传感器选用WQ36—45 倾斜角传感器, 分辨率达0.01º。
图1 为控制系统的方框图。
图1 控制系统框图2 控制系统的误差及稳定性分析211 系统参数与分辨率根据分析确定系统采用两点调平法。
压桩机系统的参数如下:系统调定压力:p= 25 MPa;系统流量: Q0= 8.3×10-3 m3/s;两阀同时开启时流入每个阀的流量:Q1= 4.2×10-3 m3/s;电液换向阀在25MPa 压力下最小切换时间:tmin= 55 ms;PLC 的吞吐时间: tp= 60 ms;机身平面尺寸:长L = 8400 mm, 宽W= 4800 mm;液压缸的速度为( 忽略压缩及泄漏的影响) :V= Q1/πr2= 4.2×10-3/( 3.14×0.162) m/ s•52.25 mm/s;活塞运动的可控最小距离H min为:H min= V•( tmin+ tp) •6.0 mm;控制系统的分辨率θ0 可用下式计算:θ0 = arctan( tan2θx + tan2θy ) 1/2= arctan( 0.51×10- 6 + 1.56×10- 6) 1/2= 0.09º其中θx=arctan( )=arctan( )=0.045ºθy=arctan( )=arctan( )=0.080º式中θx及θy分别为X 方向及Y 方向的最小可控角。
静力压桩机压桩垂直度监测仪的设计

图3 显示界面 由于现 场施工 时要 对 系统 进行 校 正 ,因此监 测仪 还
光, 蓝底白字的显示效果, 对比度可以调节,显示角度
是 6 钟。C 01 O0通过 向 S 13 点 8 5F 2 ED 35控 制 器发送 数 据 来驱 动液 晶显示屏 。S D13 E 35控制 器有 1 3条指令 ,多数
迫。 图 1 垂!度监测仪硬件原理图 符 合标准 I E l4 . E E 9 1的 J G 接 口 ,通过 J C 口可 TA TA
针对此问题,笔者设计了以美国 C G A Y N L公司的
3X二 片 C O F 2 为 中央 处理 器 ,3 x2 图形 液晶 芯 S 5 O l 0 0 2 0 4
停压桩机垂直度监测仪 时间显示 v. 10
由于静力压桩机采用电机驱动,外部电源为 20 2V,
传感 器用 电为 1 V,但是 C 0 1O 0用 电是 33 2 85F 2 .V,液晶
显示屏用电是5 考虑到工程机械车载直流 电 V, 源模块有 1V和 2V两种 ,因此本文设计的电源模块可以在宽 电 2 4
北京 :北京航空航天大学出版社 ,20 02 ]]张全胜 ,范寿廉.S D13 2 E 35液晶控 制器 与单片机 的应 用接口 [].今 日电子 ,20 , ) J 03 ( . 6
〔 贵任编辑 :杨 晓光〕
建筑机械
2 5. 2 00 1
设计了标定界面, 分别可以对传感器和水平位置进行标
定 ,还 可以设 定系统 时间 。
指令带有参数, 参数值由用户根据所控制的液晶显示模 块的特征和显示的需要来设置。
16 传 感器 .
3 垂直度监测仪的优化
系统的 硬件和软件联机调试通过后, 基本上可以实 现监测功能和显示效果。当把设计好的监测仪放置在静 力压桩机上进行上机调试时, 发现监测界面的动态点变 化很快 , 飘动幅度比较大。解决此问题主要通过对传感 器进行多段直线拟合和多次求平均的方法,通过软件调
静力压桩机的压桩定位控制研究的开题报告

静力压桩机的压桩定位控制研究的开题报告一、选题问题的背景随着建筑工程的不断发展和进步,各种桩式的应用也呈现出多样化、复杂化的趋势。
而其中以静力压桩为主的基础工程方式,由于具有压桩速度快,效率高,成本相对较低,施工易控制等优点,被越来越多的建筑工程采用,并且越来越受到青睐。
然而,在现实中,仍然存在一些未解决的问题,其中比较重要的一个问题是静力压桩机的压桩定位控制问题。
二、选题问题的意义在工程实践中,静力压桩机的压桩定位控制问题十分关键。
准确地控制定位,能保证桩体的整体性和稳固性,保障建筑物的安全性和稳定性。
同时,准确控制桩身的深度和倾斜角度,还能够避免因定位问题导致的无效压桩,提高工程的施工质量和效率。
三、选题问题的研究内容本研究将聚焦于静力压桩机的压桩定位控制问题,主要研究如何在现有控制模式的基础上,对其进行升级改进,达到更为精准的控制效果。
具体的研究内容包括:1.静力压桩机的基本原理和工作模式2.现有压桩定位控制模式的分析和评估3.压桩定位控制系统的升级改进方案的研究4.压桩定位控制系统的设计和实现5.系统性能测试和优化四、研究计划和进度安排本研究计划分为以下几个阶段:1.文献资料的查阅和分析(一个月)通过查阅国内外有关静力压桩机的研究资料和文献,掌握其基本原理和工作模式,分析现有压桩定位控制模式的优缺点,为后续研究提供理论和技术支持。
2.研究方案的制定和评估(两个月)在文献资料的基础上,提出压桩定位控制系统的升级改进方案,并进行评估和预估实施成本,确定最终研究方案。
3.系统设计与实现(三个月)根据研究方案,进行压桩定位控制系统的软硬件设计与实现,包括传感器的选择、数据采集和处理、控制算法的编写等。
4.系统测试与性能优化(一个月)对系统实现的精度和稳定性进行测试,并进行功能和性能的优化和改善。
5.论文撰写和答辩(两个月)按照学院要求完成论文的撰写和绘制,准备并进行毕业答辩。
五、预期收获通过本研究的开展,预期能解决静力压桩机的压桩定位控制问题,实现压桩的高精度定位,提高工程施工质量和效率。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
万方数据
缸 I
缸2
缸 3
缸 4
液控单 向阀
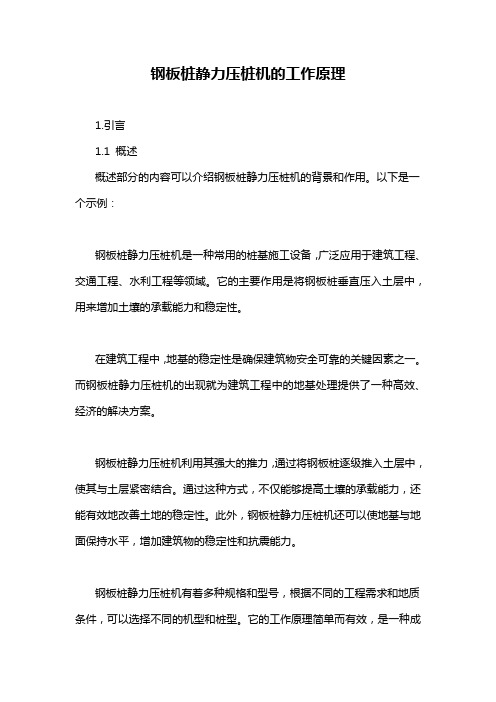
图 1 升 降i 压原 理 圈 f液
声
,J 瓜
a
甘h ,
图 2 机 身倾斜 示竞 圈
位置。两个角位移传感器安装在升降缸 1 附 近 将油缸 1 作为基准点在自 动调平过程中 保持不动。 假设在机身的X Y , 方向 有倾斜角 a 时, 准 机身X Y , 方向的边长分别为ab ,I 234 ,,各点相对 I 相对高度为: 点的
e二 P, ,A +价 4 j 式中 4 — 极限桩端荷载 a
A— 桩 , 端横截面面积
U — 桩身周长 , 9 — 按土层划分的桩周极限摩擦 a
力
8c2 95 单片机的自动控制系统,可实现桩
机机身自动调平、防止桩身破损 、计算单 桩承载力并确定终压控制条件,自动完成 压桩过程 ,为设计 、监理人员简单直观地
扩展了三个并行口, 作为打印输出接口。键 盘和显示器由87 芯片管理。 29 3 数据采集模块 . 2 该模块实现对压桩深度、 油压值以 及机 身水平度的采集。它由两个压力传感器、 一
个光电旋转编码器、 一个压力继电器和两个
3 0
角位移传感器组成。 一个压力传感器接主压桩缸的无杆腔, 另一个压力传感器接夹桩缸的无杆腔。它可 将油压值转换成电流信号输出,在输出端接 一个 20 5f的电阻,将电流信号转换成电压 信号, 再将该电压信号分别接A D转换通道 / I1 N 和通道 IO N 进行 A D转换 , / 完成对主压 桩缸和夹桩缸油压的测试。压力继电器接副
基于 8c2 9 5 单片机的静力压桩机 自动 控 制 系 统
龚艳玲 , 周宏机电学院 , 湖南 长沙 40 8 ) 103
摘要 介绍了一种基于8c2 95 单片机的静力压桩机控制系统, 实现静力压桩机机 身的自 动调平卜 实时计算单桩承载力, 并自动确定终压控制条件, 提高静力压桩机的
5 结论
() 1 现场试验证明, 应用本文设计的自 动控制系统, 可方便迅速地实现机身自 动调 平, 能够满足施工要求, 并可减少桩身受损。 () 2 只要将施工现场的土层资料输人系 统, 即能实时计算单桩承载力, 并根据设计 要求自 行确定终止压桩。 压桩结果对于桩的 检验具有指导性意义。
2 8
l ; 按土层划分的各段桩长 — 将工地的土层资料和桩的设计要求输 人系统 , 就能实现实时计算单桩承载力, 当 承载力满足设计要求时 , 停止压桩。 22 机身自动调平方案 . 四个升降油缸采用电磁换向阀控制, 液压原理图如图 1 所示。图 2为机身平面 倾斜示意图, ,,, 1234为四个升降油缸的
( 收稿 日期 :03 0 - 1 20 - 8 2 )
凿岩机械气动工具, 0 () 2 34 0
万方数据
压桩缸, 用来判断副压桩缸是否参与压桩。 压 桩深度的测量由光电旋转编码器完成。
在油缸 1 上沿机身 X 向安装两个 , Y方 角位移传感器。角位移传感器输出的角度信
凿岩机械气动工具 20 () 034
万方数据
号 为 电压 信号 ,经过 差 动放 大 后 输 人 A C89 D 00 转换通道 I2 N , N 和I3 3 输入、 . 3 输出模块 键盘采用 0 2 键小键盘,微型打印机用 于输出承载力、 压桩阻力、 压桩总深度以及 压桩阻力一 深度曲线。显示器由八个八位发 光二极管组成, 实时显示压桩深度, 夹桩力 过大时峰鸣器报警 ,同时显示夹桩油压力。 机身调平信号的 输出直接利用C U的 P. P 1- 2 P .控制 3 1 7 个电磁换向阀的 6 个开关。
31
万方数据
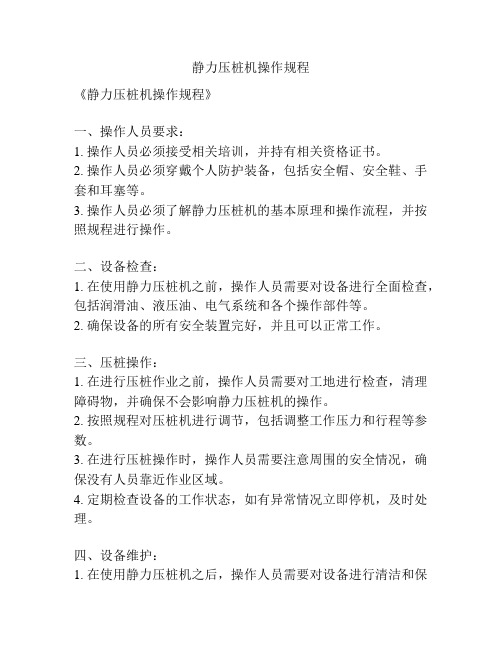
信号采集子程序
图 5 数据采集程序框图
图 6 机 身 调平 子 程 序框 围
液 缸升或 直到 } (a } }N 压 降, a} o R} , ,
调平结束。
() 3 计算方法具有通用性, 适用于任何 地区和任何桩机。
参考文献 : [1 1 顾晓香, 钱鸿绪等编著. 地基与基础{」 M. 北京: 中国建筑工业出版社,93 19.
要 问题有 ;
确定桩机真正的压桩能力提供可靠依据
2 系统总体方案
21 承载力计算 . 单桩极限承载力由桩侧摩擦阻力和桩 端阻力组成,单桩极限承载力除以安全系 数2I 1 `得单桩承载力。单桩极限承载力的 ,
计算公式 :
() 1如何使设计 、 监理人员能简单直观 地确定桩机真正的压桩能力,避免施工单 位“ 以小充大” 。 () 2对于抱压式桩机, 如何防止桩身受 损?改进夹具设计, 改善桩身受力状况是预 防桩身破损的一个方面;保持机身水平, 控 制夹桩力, 是避免桩身破损的基本条件。 本文主要针对湖南山河智能机械股份 有限公司生产的 Z J Y 系列静压桩机 ,根据 施工 、监理单位的要求 ,设计 了一套基于
自动化作业程度。
关钮词: 静力压桩机; 动调平; 自 承载力: c2 8 5 单片机 9
中 网 分 份 县 T 1 A . I 7 6 ?i f v 9码 . A
1 前言
由于液压静力压桩机性能的不断改进 和提高, 压桩力从原来的 1 k 60 0 N提高到 6 k , 80 甚至 8 k , 0 N 00 静压桩的应用范 0 N 围逐步扩大。但是, 随着桩机吨位的增大, 工程应用中存在的问题也越来越突出, 主
4 软件设计
软件部分分主控模块、承载力实时计算 模块 、 机身调平模块。 夹桩压力检测及报警在 承载力计算模块中。 4工 主控模块 . 主控模块主要完成各端口及各通道的初 始化设置, 以及各功能模块的调用。 通过按键 即可进行功能选择。图4为主程序框图。 4 承载力实时计算模块 . 2
2, 接通, b3 6 调定时子程序, 使油缸 23 , 同时 下降 h , , 断开; < 时,I ,I 刀 23 bb a a P. PA -o 2 置 12 ,a , 3 接通, a 使油缸 23 , 同时上升h 2 2. /
同 样, 日卜p时, 1 相应的 当} 。 将P 口 位置
I接通电磁阀开关, , 使油缸 4和 3 同时升或 降。 再次采集数据, 进行A D转换, / 控制相应
h = i a , s an
其中h 是 由于 2 4两点的相对 高度 , , 所产生,因此,只需将油缸 2和 3 同时移 动一 , h 的距离 ,然后将油缸 4和 3同时移 动一 ; h 的距离, 即可将机身调平。 机身调平 采用“ 逐次逼近” 每次移动 5%的倾斜 法, 0 距离后 , 再进行一次 A D转换 , / 求出倾斜
主控模 块
系统初 始化
调键盘扫描子程序
I Y
有 键 按下 ? 取 键值
功 能键判 断
键值 = A
调承载力实时计算子程 序
键值 二 B
链值 二C
调 打印 子程 序
调机身自动调平子程序
图 4 主 程序 框 图
该模块完成对压桩时的油压和压桩深 度的测试, 以及计算压桩阻力和实时显示压 桩深度, 根据土层资料及桩的承载力要求确 定压桩终止条件。它又包括数据采集程序、 中断服务子程序 I 、中断服务子程序I、 I计 算子程序以及深度显示服务子程序。图5 为 数据采集程序框图。当夹桩位夹紧桩时, 若 旋转编码器转动,程序将进人中断服务程 序, 当副压桩缸工作时 , 程序进中断服务子 程序I, I 在两个中断服务子程序中进行压桩 深度和压桩阻力的计算,显示压桩深度, 判 断是否终止压桩,若夹桩力超过极限值, 报
凿岩机械气动工具. 0() 2 34 0
警并显示夹桩油压值。 43 机身调平模块 .
调平子程序框图如图6 所示。 1- I P. P. 2 7 设置为输出口,角位移传感器的信号输人 A C89AD转换结束, U读取a D 00,/ C P 尹值,
当a , .P.置I 电磁换向阀开关 > 1 , 5 , aP 3 l q
3 2
[ 龚艳玲. 2 1 静压桩承载力计算机实时顶测系统的 研究与开发[] D. 长沙: 中南大学,96 19. [] 3 王长瓶, 文军编著. 单片机原理与应用( 下 上、 册) l 武汉大学出版社,93 I 武汉: M 19. [ 曾益昆. 4 ] 压桩机自动调平控制系统的模糊 PE I 控制研究[] D. 长沙: 中南大学,01 20.
3 中心处理模块 . 1 选用 A 9c2单片机为中心处理器 , 85 T A9c 具有体积小、 T8 2 5 功耗低、 功能强、 性价 比高、 片内集成 8 fs 程序存储器等优点。 K h l a 数 据 存 储 器 选 用 一 片 静 态 R M 25 A 626
(2 ) A D转换采用 A C 89 3K , / D 00 。通过 85 15
结束 。
3 硬件设计
系统 由中心处理模块 、 数据采集模块 、 输人 、 输出模块三部分组成。 3为硬件组 图
成原 理 图。
油缸运动速度 。 口 A,当油缸面积A 二x 和流量 Q一定时, 对油缸位移的控制可转
化 为对电磁换向阀通 电时问的控制。
图 3 控 制 系统 组成 原 理 圈
h= a+ s 日 b , i an s i n
h 二b p ; s i n
凿岩机械气动工具, 0() 2 34 0
角ap再 ,, 移动5% 倾斜距离, } 0的 直到 a}
盛 o } ‘0(o 。 a, 日} . . 为根据施工要求所 aR
万方数据
确定的机身允许倾斜的角度 ) ,调平过程