HAUSER驱动器报警说明
伺服报警说明

伺服、主轴驱动器检测作业指导书1.伺服驱动器的性能检测2.1 按照伺服驱动器上的端子标示将两相220V、三相220V、地线及电机动力线对应接好。
上电前一定要检查接线正确。
2.2 给伺服驱动器供电,伺服驱动器的显示板要显示正常,不能出现无显、少笔、部分显示暗。
按键功能要正常,不允许出现按键无效、按键卡死等不合格产品。
2.3 设置参数。
根据产品型号的不同,参数的设置也有所不同。
具体参数的设置如下表:型号参数设置160 160-020 PA--0设为2000,PA--2设为12560,PA--4设为4,PA--32设为5160-03016B 16B-020 PA--0设为2000,PA--2设为12560,PA--4设为4,PA--32设为516B-03016L 16L-050 PA--0设为2000,PA--2设为6560,PA--4设为4,PA--32设为516L-07518D 18D-025 PA--2设为4000,PA--3设为40 18D-050 PA--2设为1000,PA--4设为4 18D-075 PA--2设为1000,PA--4设为4 18D-100 PA--5设为1000018D-150 PA--5设为1000018D-200 PA--5设为1000018S18S-025 使用初始值18S-050 使用初始值18S-075 PA--33设为4500,PA--34设为45018S-100 PA--33设为6000,PA--34设为1500,PA--35设为150018S-150 PA--33设为6000,PA--34设为3800,PA--35设为1350参数设置完毕后,选择世纪星程序运行。
如无法正常运行,看伺服驱动是否使能并准备好。
如无使能,则不合格。
运行过程中伺服驱动器可能会报警,报警代码从A1到A16,详情见下表:160、16B、16L系列伺服驱动器报警详情一览表报警代码报警名称处理方法1 主电路欠压接通主电源时①检查供电电源②换伺服驱动器电机运行过程中①检查负载情况②换伺服驱动器2 主电路过压接通控制电源时换伺服驱动器接通主电源时检查供电电源电机运行过程中①换伺服驱动器②检查外部制动电路3 IPM模块故障接通控制电源时换伺服驱动器电机运行过程中①换伺服驱动器②检查检查U、V、W之间接线是否短路4 制动故障接通控制电源时换伺服驱动器电机运行过程中①检查主电源②换伺服驱动器5 保险丝熔断电机运行过程中①检查U、V、W之间接线是否短路②换伺服驱动器6 电机过热接通控制电源时①检查伺服驱动参数STA-12是否为1,不是则改为1保存,断电后重新上电②更换伺服驱动器电机运行过程中①检查机械部分②更换伺服驱动器7 编码器A、B、Z故障①检查编码器接线②换伺服驱动器③更换电机8 编码器U、V、W故障①检查编码器接线②换伺服驱动器③更换电机9 控制电源欠压①检查控制电源②换伺服驱动器10 过电流①检查U、V、W之间接线是否短路②换伺服驱动器③检查伺服电机11 系统超速接通控制电源时①换伺服驱动器②更换伺服电机电机刚启动时①更换伺服电机电机运行过程中①换伺服驱动器②更换伺服电机③换编码器电缆12 跟踪误差过大接通控制电源时换伺服驱动器电机刚启动时①检查U、V、W接线是否正确②换伺服驱动器③更换伺服电机电机运行过程中①换伺服驱动器②更换伺服电机13 软件过热换伺服驱动器14 控制参数读错误①检查控制电源电压②换伺服驱动器15 DSP故障①检查控制电源电压②换伺服驱动器16 看门狗故障①检查控制电源电压②换伺服驱动器18D系列伺服驱动器报警信息一览表报警号报警信息处理方法A-1 主电源电压低于300V ①检查主电源电压②更换伺服驱动器A-2 主电源电压高于780V ①检查主电源电压②更换伺服驱动器A-3 逆变器功率器件故障更换伺服驱动器A-4 制动电路故障更换伺服驱动器A-5 主电源输入缺相①检查主电源相数②更换伺服驱动器A-6 伺服电机过热①检查参数STA-12(为1是正确的)②更换伺服驱动器A-7 编码器A、B、Z故障①检查编码器电缆②更换伺服驱动器③更换电机A-8 编码器U、V、W故障①检查编码器电缆②更换伺服驱动器③更换电机A-9 控制电源欠压①检查控制电源电压②更换伺服驱动器A-10 逆变器过流故障②更换伺服驱动器A-11 电机超速①更换伺服驱动器②更换电机A-12 跟踪误差过大①检查码盘线、指令线是否松动②检查伺服参数(23控制方式,24极对数)③更换伺服驱动器④更换伺服电机A-13 系统过载①更换伺服驱动器②检查码盘线、指令线是否松动A-14 系统参数错误①检查伺服参数②更换伺服驱动器A-15 控制板电路故障更换伺服驱动器A-16 DSP故障更换伺服驱动器A-17 驱动器过热更换伺服驱动器18S系列主轴驱动器报警信息一览表报警号报警信息处理方法A-1 主电源电压低于300V ①检查主电源电压②更换主轴驱动器A-2 主电源电压高于780V ①检查主电源电压②更换主轴驱动器A-3 逆变器功率器件故障更换主轴驱动器A-4 制动电路故障更换主轴驱动器A-5 主电源输入缺相①检查主电源相数②更换主轴驱动器A-6 主轴电机过热①检查参数STA-12(为1是正确的)②更换伺服驱动器A-7 编码器A、B、Z故障①检查编码器电缆②更换主轴驱动器③更换电机A-8 编码器U、V、W故障①检查编码器电缆②更换主轴驱动器③更换电机A-10 过电流故障①更换主轴驱动器A-11 电机超速①更换主轴驱动器②更换电机A-12 跟踪误差过大①检查码盘线、指令线是否松动②检查驱动器参数(23控制方式,24极对数)③更换主轴驱动器④更换伺服电机A-13 系统过载①更换主轴驱动器②检查码盘线、指令线是否松动A-14 系统参数错误①检查伺服参数②更换主轴驱动器A-15 控制板电路故障更换主轴驱动器A-16 DSP故障更换主轴驱动器A-17 驱动器过热更换主轴驱动器3.检测完成后操作伺服驱动能正常运行完程序,并且没有出现以上的报警现象、显示正常、风扇能正常运行的驱动器则是合格品。
三菱伺服报警解释

A
9F
WAB
电池电压过低
绝对值检出器的电池电压过低
A
E0
WOR
过回生警告
达到过回生异警所须的80%阶层时被检出
A
E1
WOL
过负荷警告
达到过负荷异警所须的80%阶层时检出。如果继续运转会产生过负荷1异警
PME
IPM晶体(过电流)异常
AMP内的IPM晶体发生异常,其原因有下列因素1、过电流2、过热3、电源电压过低等。
PR
A
33
OV
过电流
AMP内部 的PN电源过电压检出。
PR
A
34
DP
CNC通信CRC异常
从NC侧所送到的AMP的资料盒异常。
PR
A
35
DE
CNC通信资料异常
从NC侧所送到的移动指令异常的大。
A
93
WAM
绝对位置变动
NC电源投入时其绝对位置的变动超出以至不能设定绝对值计数器
PR
A
96
MPE
MP型光学尺回授异常
在MP型光学尺绝对位置系统中,马达端MP光学尺装置和回授量的差值过大检出
C
97
MPO
MP型光学尺辅正异常
在MP型光学尺绝对位置系统中,当NC投入时读入的辅正资料异常检出
A
9E
WAR
高速解码器多回转计数器异常
P----电源供应器不良(在伺服AMP上有连接电源供应器时,才有此报警)
号码
简称
名称
内容
重置方式
区分
10
UV
山洋驱动器说明
(模式4-第8页PSKD)
报警状态
7段LED显示
报警代码
ALM8,4,2,1
缩写
报警名称
报警清除
报警内容
1100
SE
速度控制错误
可以
速度控制不能正常工作
报警代码中的0,1表示:当Func2/ bit7,6=“0,0”时,“0”=输出断路 ,“1”=输出短路。
报警出现时的运转状态
报警代码中的0,1表示:当Func2/ bit7,6=“0,0”时,“0”=输出断路 ,“1”=输出短路。
报警出现时的运转状态
运转状态
可能的故障原因
1
2
3
4
5
6
7
8
9
10
11
12
13
当控制电源接通时
○
在伺服ON时的停止期间
○
○
在指令开始输入时
○
△
○
○
○
○
△
○
△
在高速启动或者停止时
○
○
△
当时电机已经启动或者停止
△
△
△
○
运转一小段时间以后
△
△
△
○
检修措施:
故障原因
1
·驱动器和电机之间的U,V,W相出现短路或者接地。
·驱动器和电机之间的U,V,W相没有连接或者连接失败。
检查驱动器和电机之间的线路
更正或者更换电线
2
伺服电机的U,V,W相短路或者接地
更换伺服电机
3
PC主板有缺陷
电源模块有缺陷
维护
8.1故障检修(有报警时)-----------------------------------------8-2
brtoher TC-S2DZ 报警资料

与最近的授权服务商取得联系。
执行了不正确的计算(从属 CPU)。
NC 板有缺陷。 与最近的授权服务商取得联系。
执行了不正确的计算(局部 CPU)。
局部板有缺陷。 与最近的授权服务商取得联系。
0016 5 3 主系统不能起动
主 CPU 没有启动。
NC 板有缺陷。 与最近的授权服务商取得联系。
0017 5 3 从属系统不能起动
(4) 停止等级 2 (被 M02 或者 M30 停止) 操作执行到当前执行的程序完成位为止。 【启动】(START)开关失效,不能再执行 NC 程序。 当单步块打开时,停止等级 3 和 2 相同。
(5)停止等级 1 只给出报警,但是机床运动不受影响。
如果出现停止等级 3 报警,当前执行的块完毕时主轴停止。 如果出现停止等级 4 报警,主轴立即停止。 注意:尽管按下了【停止】(STOP)键,主轴也不会停止。
该表包括了某种型号或者特殊规格型号有可能出现的报警。
编号
停机 等级
重置 等级
报警信息
原因
0000 5 3 监控器(主)
主 CPU 发生错误。
解决方法
NC 板有缺陷。 与最近的授权服务商取得联系。
0001 5 3 监控器(从属)
从属 CPU 发生错误。
NC 板有缺陷。 与最近的授权服务商取得联系。
0002 5 3 监控器(局部)
第 11 章 报警
编号
停机 等级
重置 等级
报警信息
0045 5 3 输入/输出 CRC 错误 2
0046 5 3 输入/输出 超时 2 0047 5 3 输入/输出 CRC 错误 3
原因
解决方法
在 MLINK 串行通讯过程中,在 如果此错误是在更换了板之后出现 一行中出现两次框架错误。 的,则检查终断用电阻是否连接正
台达伺服驱动器报警原因分析及纠正

22
11编码器与驱动器之间的连接断裂。当控制电源接通时,编码器转速高于规定值。
确保编码器的电源是5VDC±5%(4.75到5.25V)。特别在长线情况下,要注意满足这要求。不应把编码器和电机的接线捆扎在一起。把屏蔽连接到机身。见编码器接线图。
*编码器通信数据出错保护
23
主要由于噪声,编码器送一个错误数据。虽然数据不对,但编码器连接不错。
用示波器监视转矩(电流波形),检查转矩是否有浪涌。检查负载因数和过载报警信息。
增加驱动器和马达的容量、延长加速/减速的斜坡时间、减少马达负载。
调整增益。
按接线图纠正电机接线、调换电缆
使机器解去纠缠物、减轻电机负载
测量制动器接线连接处的电压。断掉制动器。
纠正电机与编码器接线,以消除电机间的失配。
再生放
检查CNI/F33脚断开的原因。
*外部反馈装置断开错误保护
35
外部反馈装置断开,或反馈装置故障。
核查外反馈的电源。按图纠正
其接线和SIG连接器。
*EEPROM参数错误保护
36
保存在EEPROM参数存储区的数据被破坏了.所以得出的是错误的数据
重新设置参数。如此情况频繁发生。驱动器可能有故障。调换一个新驱动器。把旧的送经销商修理。
保 护
报警
号码
原 因
对 应 措 施
过速保护
26
电机速度超过规定的限制值
减低目标速度(指令值)。减少
Pr50(速度指令输入增益)值。
调整分频比率,使指令脉冲频
率为50Kpps或更小。如果发生
过冲,重调增益。按图纠正编码
器接线。
外部反馈出错保护
28
当Pr76(外部反馈故障无效)= 0,而驱动器运作在全闭环和外编码器混合控制状态时,外反馈出错输入为断开。
哈默纳科伺服报警手册

哈默纳科伺服报警手册哈默纳科伺服报警手册目录一、前言二、什么是哈默纳科伺服报警2.1 哈默纳科伺服报警的定义2.2 伺服报警的分类2.2.1 伺服报警等级2.2.2 伺服报警代码2.3 伺服报警的作用三、常见的哈默纳科伺服报警代码解析与处理3.1 E001-E009 伺服驱动器错误3.2 E010-E019 电机错误3.3 E020-E029 通信错误3.4 E030-E039 位置错误3.5 E040-E049 动力单元错误3.6 E050-E059 I/O错误3.7 E060-E069 系统错误3.8 E070-E079 配置错误3.9 E080-E089 参数错误3.10 E090-E099 环境错误3.11 E100-E109 其他错误3.11.1 伺服运动报警3.11.2 伺服通信报警3.11.3 伺服参数报警3.11.4 伺服硬件报警3.11.5 伺服软件报警四、如何解决哈默纳科伺服报警4.1 根据报警代码进行初步诊断4.2 检查伺服系统硬件4.3 检查电源及电缆连接4.4 检查伺服参数设置4.5 联系供应商或技术支持五、伺服报警的预防与维护5.1 定期进行硬件检查和保养5.2 做好电缆连接的固定和防护5.3 定期备份和更新伺服参数5.4 严格执行操作规程和工艺流程5.5 提供培训和实施知识共享六、总结一、前言哈默纳科伺服报警是指哈默纳科(HUMERNAC)公司生产的伺服系统在运行过程中发生故障或异常时,通过报警代码和报警信息向用户进行提示和告知。
合理正确的处理伺服报警,对于解决故障、保护设备和保证生产正常进行具有重要作用。
本手册将对常见的哈默纳科伺服报警代码进行解析和处理,以及故障的排查和解决方法进行阐述,帮助用户在实际操作中更好地识别、处理和避免伺服报警。
二、什么是哈默纳科伺服报警2.1 哈默纳科伺服报警的定义哈默纳科伺服报警是指当哈默纳科伺服系统出现故障、异常或错误时,通过报警代码和报警信息向用户进行提示和告知。
HUBER报警代码中文
Display Error Messages显示错误信息Alarms and Warnings 警报和警告If an error occurs, the unit will display an alarm or warning message in clear text on the graphic display (60). Each error is allocated an error code.如果发生错误,机器将会在文本中以图线形式显示报警或警告信息。
每一个错误分配一个错误代码。
Errors are separated into three categories:错误可分为3 类:Hard alarms (error codes -1 to -1023): When a hard alarm occurs, temperature control is immediately stopped. The unit must be turned off, using the main switch (36) and the error condition corrected. The unit can then be turned on again. If an alarm occurs during the unit start up and self-test, please contact Huber for advice.硬报警(错误代码-1 到-1023):硬报警(错误代码-1至-1023):当发生硬报警,立即停止温度控制。
必须关闭机器,使用主开关(36)和修改错误条件。
然后可以再次开启机器。
如果机器在启动和自检过程中报警,请与Huber公司联系。
Soft alarms (error codes -1024 to -2047): These alarms also cause the temperature control to be immediately stopped. After clearing the error condition temperature control can be restarted without cycling power to the unit.软报警(错误代码-1024 到-2047):软报警(错误代码-1024至-2047):报警也可导致温度控制立即停止。
伺服驱动器报警解决方法

伺服驱动器报警解决方法1.伺服驱动器报警代码E01/E02/E03/E04:电源故障报警这种报警一般是由于电源输入电压异常导致。
解决方法如下:-检查电源输入是否正常,包括电压是否稳定、频率是否正常。
-检查电源线路是否连接良好,排除断线或短路的可能。
-检查伺服驱动器内部的保险丝是否熔断,如有需要更换。
2.伺服驱动器报警代码E05/E06/E07:控制电源故障报警这种报警通常是由于控制电源输入异常导致。
解决方法如下:-检查控制电源线路是否连接正确,确保电压和频率都在正常范围内。
-检查控制电源的开关是否正常,如有需要更换。
3.伺服驱动器报警代码E08~E10:驱动电源故障报警这类报警通常是由于驱动电源输入异常或过载导致。
解决方法如下:-检查驱动电源线路是否接触良好,确保电压和频率都在正常范围内。
-检查电机负载是否过大,如有需要减小负载。
-检查电机本身是否出现故障,如有需要更换。
4.伺服驱动器报警代码E11/E21/E31/E41:编码器故障报警这类报警通常是由于编码器反馈信号异常或缺失导致。
解决方法如下:-检查编码器连接线路是否良好,确保信号传输无误。
-检查编码器本身是否损坏,如有需要更换。
-检查编码器信号是否在规定的范围内,如有需要进行调整。
5.伺服驱动器报警代码E12/E13/E14/E15:通信故障报警这类报警通常是由于通信线路异常或通信参数设置错误导致。
解决方法如下:-检查通信线路是否连接正确,确保信号传输无误。
-检查通信参数设置是否正确,包括波特率、数据位、校验位等。
-检查通信协议是否匹配,确保与其他设备的通信兼容性。
6.伺服驱动器报警代码E16/E17/E18/E19:过流保护报警这类报警通常是由于电机过载或电路故障导致。
解决方法如下:-检查负载是否过大,如有需要减小负载。
-检查电机是否正常工作,如有需要更换。
-检查电路是否存在短路或接触不良的情况,如有需要修复线路。
总之,伺服驱动器报警问题的解决方法很大程度上取决于具体的故障原因。
HASS机床报警大全

HASS机床报警大全2011-02-22 13:05:47| 分类:机床及故障| 标签:|字号大中小订阅任何时候发出警报时,屏幕右下角都会出现闪烁的“Alarm”(警报)。
按Alarm显示键以查看当前警报。
所有警报出现时都带有参考编号以及完整的说明。
如果按Reset(复位)键,将从警报列表中去除一条警报。
如果有18条以上的警报,显示的将是最后18条,必须用Reset (复位)来查看其它警报。
任何警报的出现都可以阻止操作员启动一个程序。
Alarms Display(显示警报)可在任何时候选择,只需按Alarm Mesgs(警报信息)按钮。
没有警报时,显示器会显示NoAlarm(没有警报)。
如果有任何警报,它们将被列出来,最新的警报排在清单的最下面。
CURSOR(光标)和Page Up(向上翻页)和Page Down(向下翻页)按钮可用于查看大量的警报。
Cursor right(光标右移)和left(左移)按钮打开或关闭警报记录显示。
请注意刀库警报可以通过执行保护ATCS恢复程序很方便地予以纠正。
首先纠正任何机械问题,按Reset(复位)直到警报被清除,选择Zero Ret(归零)模式,然后选择AutoAllAxes (所有轴自动执行)即可。
有些信息会在编辑过程中显示,以告诉操作员什么做错了,但不会报警。
参见有关的编辑主题以了解那些错误。
以下警报表列出了警报编号、与警报一起出现的文字、以及对警报、可能的起因、可能的出现时间、以及如何纠正的详细说明。
当车床和铣床之间的警报编号含义不同时,将在警报编号之后直接加上(L)或(M),或在正文中加以说明。
(L)和(M)不会出现在机床显示的警报编号中。
101 与电机控制器发生通信故障-在对电机控制器印刷电路板和主处理器之间的通信进行自检期间,主处理器没有反应,它们中有一个可能坏了。
检查电缆连接和电路板。
本警报可能因电机控制器中检测到故障引起。
102 伺服系统断开-指示说明伺服电机断开,刀库被禁用,冷却剂泵断开、以及主轴电机停机。
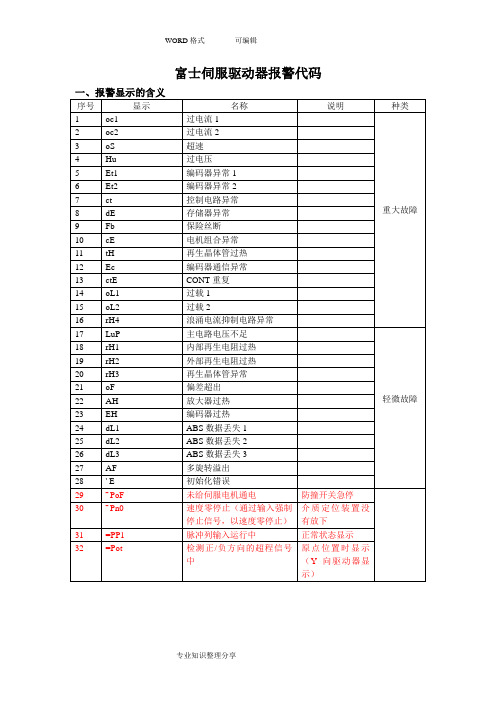
富士伺服驱动器报警代码
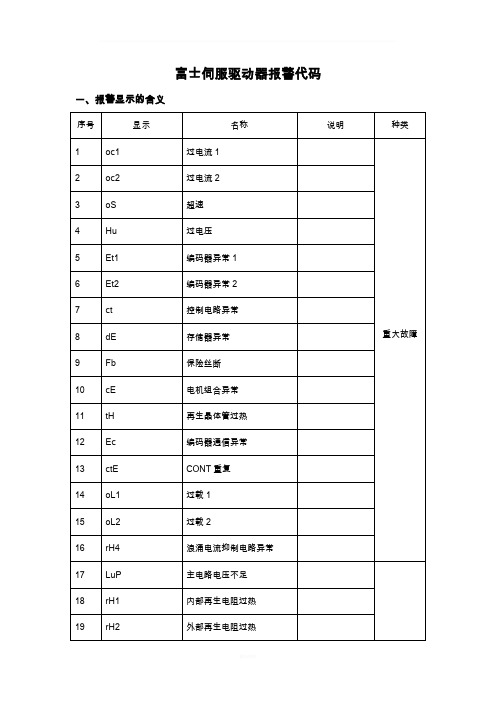
富士伺服驱动器报警代码一、报警显示的含义序号 显示名称说明种类 1 oc1 过电流1 重大故障2 oc2 过电流23 oS 超速4 Hu 过电压5 Et1 编码器异常16 Et2 编码器异常27 ct 控制电路异常8 dE 存储器异常9 Fb 保险丝断 10 cE 电机组合异常 11 tH 再生晶体管过热 12 Ec 编码器通信异常 13 ctE CONT 重复 14 oL1 过载1 15 oL2 过载216 rH4 浪涌电流抑制电路异常 17 LuP 主电路电压不足18 rH1 内部再生电阻过热 19rH2外部再生电阻过热20 rH3 再生晶体管异常 轻微故障21 oF 偏差超出 22 AH 放大器过热 23 EH 编码器过热 24 dL1 ABS 数据丢失1 25 dL2 ABS 数据丢失2 26 dL3 ABS 数据丢失3 27 AF 多旋转溢出 28 ' E 初始化错误29 ¯PoF 未给伺服电机通电 防撞开关急停30¯Pn0速度零停止(通过输入强制停止信号,以速度零停止) 介质定位装置没有放下31 =PP1 脉冲列输入运行中 正常状态显示 32=Pot检测正/负方向的超程信号中原点位置时显示(Y 向驱动器显示)二、报警的处理方法:oc1 过电流1:从伺服放大器输出的电流超过规定值oc2 过电流2:原因措施伺服电机的输出配线错误修复动力线(U、V、W)的配线确认电线(目测、导通检查),并更换伺服电机的输出配线短路伺服电机绝缘不良绝缘电阻测定(对地间在数MΩ以上)伺服电机的故障线间电阻测定(各线间为数Ω)再生电阻器的电阻值不合适更换为可适用范围的再生电阻器因编码器的异常引起的电流不平稳更换伺服电机未接地线连接地线oS 超速:伺服电机的转速超过最高速度的1.1倍原因措施伺服电机的输出配线错误修复动力线(U、V、W)的配线伺服电机的转速超速●延长PA1_37:加速时间●增大PA1_52:一次延迟S形时间常数●提高PA1_15:自整定增益1Hu 过电压:伺服放大器内部直流电压高于上限值原因措施电源电压过高(刚接通电源后)●确认电源电压在规格范围内●若有功率改进用电容器则插入电抗器外部再生电阻器的未连接或误配线连接外部再生电阻器再生晶体管破损更换伺服放大器Et1 编码器异常1:编码器的1转位置检测异常Et2 编码器异常2 :编码器存储数据的读取异常原因措施来自编码器的数据异常使用屏蔽线以免爱噪音影响编码器出现故障更换伺服电机ct 控制电路异常:伺服放大器内部的控制电源电压存在异常,内部电路有出现的故障的可能性原因措施伺服放大器出现故障即使再次接通电源也未恢复时,更换伺服放大器dE 存储器异常:伺服放大器内保存参数数据损坏原因措施存储器的内容已破损●在PC加载器上读取参数,再设定以红字显示的参数●实行参数的初始化●采取上述对策后仍未恢复,则更换伺服放大器参数的改写次数超过10万次更换伺服放大器Fb 保险丝断:伺服放大器主电路的保险丝断线原因措施保险丝断线更换伺服放大器cE 电机组合异常:连接的伺服电机与伺服放大器的功率、型号不同原因措施伺服电机与伺服放大器的功率、型号不同确认伺服电机及伺服放大器功率、型号tH 再生晶体管过热:内置于伺服放大器的再生处理用晶体管过热原因措施电源电压过高(刚接通电源后)●确认电源在规格范围值内●若有功率改进用电容器则插入电抗器再生电力过大●延长减速时间●降低伺服电机的转速●延长停止时间降低再生频度Ec 编码器通信异常:未能与伺服电机内部的编码器通信原因措施编码器的串行通信异常●电线的确认(目测、导通校验)与修复配线断线或接触不良●确认并修复编码器电缆的断线状态●插入铁氧体磁心ctE CONT重复:伺服放大器的指令序列输入端子的分配重复原因措施多个端子分配同一输入信号CONT信号设定时不要设定同一序号oL1 过载1:轴锁定等在短时间检测出的报警oL2 过载2:转矩的有效值超过伺服电机的容许值原因措施伺服电机不能机械性旋转●确认并修复动力线(U、V、W)的配线●确认制动器是否在运行较之伺服电机功率机械系统较重●根据负载率重新检查伺服电机功率●若转速低则装入减速机●升降机械停止时以制动器保持加减速频度及运行频度高延长单循环时间,降低运行频度伺服放大器破损更换伺服放大器LuP 主电路电压不足:供给伺服放大器的主电源低于规格范围内的最低电压原因措施因瞬间断电等引起的电源电压下降●确认是否会发生瞬间断电的电源环境,改善电源环境●电源功率及变压器功率的确认及其改善rH1 内部再生电阻过热:内置于伺服放大器的再生电阻器的电力消耗量超过上限值原因措施电源电压过高(刚接通电源后)●确认电源电压在规格值内●若有功率改进用电容器则插入电抗器根据上下搬运及卷绕用途不可消耗再生电力●延长减速时间●降低伺服电机的转速●延长单循环时间,降低运行频度未连接再生电阻正确连接,将PA2_65置于0或2rH2 外部再生电阻过热:外部再生电阻过热信号(b接点信号)运行(释放)原因措施电源电压过高(刚接通电源后)确认电源电压在规格值内根据上下搬运及卷绕用途不可消耗再生电力●延长减速时间●降低伺服电机的转速●延长单循环时间,降低运行频度●提高外部再生电阻器的功率●安装配重外部再生电阻过热信号的误配线正确连接rH3 再生晶体异常:伺服放大器内置的再生处理用晶体管出现故障原因措施再生晶体管发生短路故障因再次接通电源重新显示时,更换伺服放大器注意:若再生晶体管发生生短路故障则有可能引起火,因此再生晶体管异常报警信号输出时请迅速将主电源置于OFFrH4 浪涌电流抑制电路异常:抑制电源接通时的浪涌电流的伺服放大器内部电路有可能发生故障原因措施伺服放大器出现故障更换伺服放大器周围温度超过55℃●将周围温度保持在40℃以下●若伺服放大器附近存在发热体则拉开距离注意:若周围温度在55℃以内,检测到该报警的情况下,不要再次运行,请更换伺服放大器oF 偏差超出:偏差超出检测值设定的伺服电机旋转量的位置偏差量累计于伺服放大器内部原因措施确认并修复动力线(U、V、W)的配线动力配线的连接错误(将伺服ON置于ON时发生报警)伺服电机不能机械性旋转确认制动器是否在运行输出转矩小增大PA1_27,28 :转矩值限制值偏差超出检测宽度小增大PA2_69:偏差超出检测值成为P控制状态将P运行信号OFF增益低实施增益调整脉冲列频率的加减速过急延长加减速时间AH 放大器过热:伺服放大器超过容许温度原因措施周围温度超过55℃●将周围温度保持在40℃以下●若伺服放大器附近存在发热体则拉开距离注意:有可能在有效转矩超过100%的情况下使用。
力士乐伺服驱动器故障代码解释及对策

力士乐伺服驱动器故障代码解释及对策
1. ALM(Alarm)故障代码:力士乐伺服驱动器检测到一个或多个故障。
此时,驱动器将进入报警状态并停止运行。
对策:首先,检查驱动器的接线是否正确,确保电源和控制信号正确连接。
其次,检查驱动器的指示灯是否有其他故障状态,并参考手册中的报警代码表来排除故障。
2. PSF(Power Supply Fault)故障代码:驱动器检测到电源供应电压异常,如过高或过低。
对策:检查电源供应,确保电压在规定范围内。
如超过规定范围,应检查电源线路和电源稳压器来解决供电问题。
3. OHC(Overheat Control)故障代码:驱动器温度过高。
对策:检查驱动器周围是否有过热源,确保风扇和散热器正常工作。
同时,尽量减少或避免长时间高负载操作。
4. OVC(Overcurrent Control)故障代码:驱动器检测到电流超过了额定值。
对策:检查驱动器输出的负载,确保没有阻塞或故障。
检查电机和驱动器的参数设置是否正确,并根据负载情况调整驱动器的电流参数。
5. SDN(Speed Monitor)故障代码:驱动器检测到电机转速异常。
对策:首先,检查驱动器和电机的接线是否正确。
然后,检查转速传感器或编码器的连接和功能是否正常。
最后,检查速度反馈参数设置是否正确。
对策:检查通信线路和连接器是否正确连接。
确保使用的通信协议和参数设置与其他设备相匹配。
如果使用的是串行通信接口,还应检查波特率设置是否正确。
富士伺服驱动器报警代码
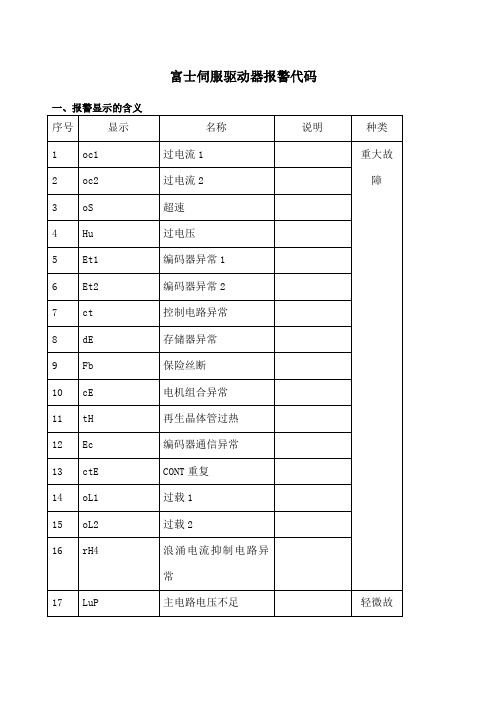
富士伺服驱动器报警代码一、报警显示的含义序号显示名称说明种类1 oc1 过电流1 重大故障2 oc2 过电流23 oS 超速4 Hu 过电压5 Et1 编码器异常16 Et2 编码器异常27 ct 控制电路异常8 dE 存储器异常9 Fb 保险丝断10 cE 电机组合异常11 tH 再生晶体管过热12 Ec 编码器通信异常13 ctE CONT重复14 oL1 过载115 oL2 过载216 rH4 浪涌电流抑制电路异常17 LuP 主电路电压不足轻微故18 rH1 内部再生电阻过热障19 rH2 外部再生电阻过热20 rH3 再生晶体管异常21 oF 偏差超出22 AH 放大器过热23 EH 编码器过热24 dL1 ABS数据丢失125 dL2 ABS数据丢失226 dL3 ABS数据丢失327 AF 多旋转溢出28 ' E 初始化错误29 ˉPoF未给伺服电机通电防撞开关急停30 ˉPn0 速度零停止(通过输入强制停止信号,以速度零停止)介质定位装置没有放下31 =PP1 脉冲列输入运行中正常状态显示32 =Pot 检测正/负方向的超程信号中原点位置时显示(Y向驱动器显示)二、报警的处理方法:oc1 过电流1:从伺服放大器输出的电流超过规定值oc2 过电流2:原因措施伺服电机的输出配线错误修复动力线(U、V、W)的配线确认电线(目测、导通检查),并更伺服电机的输出配线短路换伺服电机绝缘不良绝缘电阻测定(对地间在数MΩ以上)伺服电机的故障线间电阻测定(各线间为数Ω)再生电阻器的电阻值不合适更换为可适用范围的再生电阻器因编码器的异常引起的电流不平稳更换伺服电机未接地线连接地线oS 超速:伺服电机的转速超过最高速度的1.1倍原因措施伺服电机的输出配线错误修复动力线(U、V、W)的配线伺服电机的转速超速●延长PA1_37:加速时间●增大PA1_52:一次延迟S形时间常数●提高PA1_15:自整定增益1Hu 过电压:伺服放大器内部直流电压高于上限值原因措施电源电压过高(刚接通电源后)●确认电源电压在规格范围内●若有功率改进用电容器则插入电抗器外部再生电阻器的未连接或误配线连接外部再生电阻器再生晶体管破损更换伺服放大器Et1 编码器异常1:编码器的1转位置检测异常Et2 编码器异常2 :编码器存储数据的读取异常原因措施来自编码器的数据异常使用屏蔽线以免爱噪音影响编码器出现故障更换伺服电机ct 控制电路异常:伺服放大器内部的控制电源电压存在异常,内部电路有出现的故障的可能性原因措施伺服放大器出现故障即使再次接通电源也未恢复时,更换伺服放大器dE 存储器异常:伺服放大器内保存参数数据损坏原因措施存储器的内容已破损●在PC加载器上读取参数,再设定以红字显示的参数●实行参数的初始化●采取上述对策后仍未恢复,则更换伺服放大器参数的改写次数超过10万次更换伺服放大器Fb 保险丝断:伺服放大器主电路的保险丝断线原因措施保险丝断线更换伺服放大器cE 电机组合异常:连接的伺服电机与伺服放大器的功率、型号不同原因措施伺服电机与伺服放大器的功率、型号不同确认伺服电机及伺服放大器功率、型号tH 再生晶体管过热:内置于伺服放大器的再生处理用晶体管过热原因措施电源电压过高(刚接通电源后)●确认电源在规格范围值内●若有功率改进用电容器则插入电抗器再生电力过大●延长减速时间●降低伺服电机的转速●延长停止时间降低再生频度Ec 编码器通信异常:未能与伺服电机内部的编码器通信原因措施编码器的串行通信异常●电线的确认(目测、导通校验)与修复●确认并修复编码器电缆的断线状态●插入铁氧体磁心配线断线或接触不良ctE CONT重复:伺服放大器的指令序列输入端子的分配重复原因措施多个端子分配同一输入信号CONT信号设定时不要设定同一序号oL1 过载1:轴锁定等在短时间检测出的报警oL2 过载2:转矩的有效值超过伺服电机的容许值原因措施伺服电机不能机械性旋转●确认并修复动力线(U、V、W)的配线●确认制动器是否在运行较之伺服电机功率机械系统较重●根据负载率重新检查伺服电机功率●若转速低则装入减速机●升降机械停止时以制动器保持加减速频度及运行频度高延长单循环时间,降低运行频度伺服放大器破损更换伺服放大器LuP 主电路电压不足:供给伺服放大器的主电源低于规格范围内的最低电压原因措施因瞬间断电等引起的电源电压下降●确认是否会发生瞬间断电的电源环境,改善电源环境●电源功率及变压器功率的确认及其改善rH1 内部再生电阻过热:内置于伺服放大器的再生电阻器的电力消耗量超过上限值原因措施电源电压过高(刚接通电源后)●确认电源电压在规格值内●若有功率改进用电容器则插入电抗器根据上下搬运及卷绕用途不可消耗再生电力●延长减速时间●降低伺服电机的转速●延长单循环时间,降低运行频度未连接再生电阻正确连接,将PA2_65置于0或2 rH2 外部再生电阻过热:外部再生电阻过热信号(b接点信号)运行(释放)原因措施电源电压过高(刚接通电源后)确认电源电压在规格值内根据上下搬运及卷绕用途不可消耗再生电力●延长减速时间●降低伺服电机的转速●延长单循环时间,降低运行频度●提高外部再生电阻器的功率●安装配重外部再生电阻过热信号的误配线正确连接rH3 再生晶体异常:伺服放大器内置的再生处理用晶体管出现故障原因措施再生晶体管发生短路故障因再次接通电源重新显示时,更换伺服放大器注意:若再生晶体管发生生短路故障则有可能引起火,因此再生晶体管异常报警信号输出时请迅速将主电源置于OFFrH4 浪涌电流抑制电路异常:抑制电源接通时的浪涌电流的伺服放大器内部电路有可能发生故障原因措施伺服放大器出现故障更换伺服放大器周围温度超过55℃●将周围温度保持在40℃以下●若伺服放大器附近存在发热体则拉开距离注意:若周围温度在55℃以内,检测到该报警的情况下,不要再次运行,请更换伺服放大器oF 偏差超出:偏差超出检测值设定的伺服电机旋转量的位置偏差量累计于伺服放大器内部原因措施动力配线的连接错误(将伺服ON置于ON时发生报警)确认并修复动力线(U、V、W)的配线伺服电机不能机械性旋转确认制动器是否在运行输出转矩小增大PA1_27,28 :转矩值限制值偏差超出检测宽度小增大PA2_69:偏差超出检测值成为P控制状态将P运行信号OFF增益低实施增益调整脉冲列频率的加减速过急延长加减速时间AH 放大器过热:伺服放大器超过容许温度原因措施周围温度超过55℃●将周围温度保持在40℃以下●若伺服放大器附近存在发热体则拉开距离注意:有可能在有效转矩超过100%的情况下使用。
迈科洗碗机 UPster H H S 报警信息及故障解决

报警信息及故障解决
(适用机型包括Upster H500 / H500S)
本节分析了一些常见故障及排除方法,若故障始终存在,请与迈科经销商或迈科公司联系。
1. 简单故障诊断
2. 操作错误
尽管机器的设计已经十分成熟,仍有一些小问题不可避免的会发生。
本节总结了一些常见的小故障,您可以尝试自己解决。
在维修设备之前,必须关闭主开关,切断电源,或者将主保险丝拔出。
反复出现的故障显示,必须记录下来以便解决。
若不能解决,请与供应商或迈科公司联系。
2.1 信息报告和错误处理
确认键
启动/ 停止键
按确认键可以取消显示的提示信息
若此时设备的功能已经储存,下一程序就会开始
按启动/停止键也可以取消显示的提示信息
提示信息(选摘)
2.2 信息报告和错误处理
确认键
启动/ 停止键
当机器错误被改正后,错误信息显示会自动消失
提示信息(选摘)
3 / 5
5 / 5。
2021年松下伺服发生故障报警代码一览及对策
3
波形生成异常
指令脉冲值急速变化。
改小加速度、減速度的设定。
28
0
脉冲再生界限保护
脉冲再生的输出频率数超过界限。
检查Pr0.11(电机每旋转1次的输出脉冲数),Pr5.03(脉冲输出分频分母)的设定值。
将检测置于无效时,请将Pr5.33(脉冲再生输出界限设定)置于0。
29
0
偏差计数溢出保护
编码器脉冲标准的位置偏差值,或者,光栅尺标准的全闭环偏差值超过2^29(536870912)。
正确设定Pr6.15(第2过速度等级设置)数值。
27
0
指令脉冲输入频率异常保护
指令脉冲输入频率数超过Pr5.32(指令脉冲输入最大设定)的设定值×1.2倍。
确认指令脉冲输入。
27
2
指令脉冲倍频异常保护
旋转1次指令脉冲数,用第1〜第4指令分频倍频分子,指令分频倍频分母设定的分频,倍频比不正确。
确认指令分频倍频的设定值。
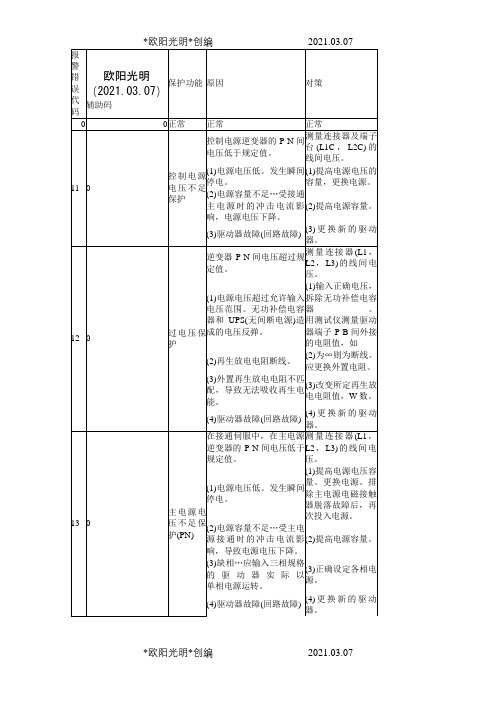
(2)再生放电电阻断线。
(2)为∞则为断线。应更换外置电阻。
(3)外置再生放电电阻不匹配,导致无法吸收再生电能。
(3)改变所定再生放电电阻值,W数。
(4)驱动器故障(回路故障)
(4)更换新的驱动器。
13
0
主电源电压不足保护(PN)
在接通伺服中,在主电源逆变器的P-N间电压低于规定值。
测量连接器(L1,L2,L3)的线间电压。
(2)发生瞬间停电。
(2)尝试将Pr5.09(主电源关闭检测时间)设定延长。正确设定各相电源。
(2)电源容量不足…受主电源接通时的冲击电流影响,导致电源电压下降。
(3)提高电源容量。
(3)缺相…应输入三相规格的驱动器实际以
伺服故障报警及处理方法

伺服故障报警及处理方法AL.10电压过低电源电压太低。
MR-E- □ A:160V以下AL.12存储器异常1 RAM存储器异常AL.13时钟异常印刷电路板的异常AL.15存储器异常2 EEP-ROM异常AL.16编码器异常1编码器和伺服放大器之间通讯异常。
AL.17电路板异常2 CPU零部件异常AL.19存储器异AL.1A电机配合异常伺服放大器和伺服电机之间的配合有误。
AL.20编码器异常2编码器和伺服放大器之间通讯异常。
AL.24主电路异常伺服放大器的伺服电机输出端(U • V • W相)接地故障。
AL.30再生制动异常制动电流超过内置再生制动电阻或再生制动选件的允许值。
再生制动晶体管异常AL.31超速转速超出了瞬时允许转速。
AL.32过流伺服放大器的输出电流超过了允许电流。
AL.33过压直流母线电压的输入在400V以上。
AL.35指令脉冲频率异常输入的指令脉冲的脉冲频率太高。
AL.37参数异常参数的设定值异常。
AL.45主电路芯子过热主电路异常过热。
AL.46伺服电机过热伺服电机的温度上升,热保护继电器动作。
AL.50过载1超过了伺服放大器的过载能力。
负载率300%: 2.5s以上负载率200%: 以上100s AL.51过载2由于机械故障导致伺服放大器连续数秒钟以最大输出电流输出。
伺服电机的锁定时间:1s以上AL.52误差过大偏差计数器的滞留脉冲超过编码器的分辨率x 10[pulse]。
AL.8A 串行通讯超时RS-232C通讯的时间超过参数No.56的设定值。
AL.8E串行通讯异常伺服放大器和通讯设备(计算机等)之间出现串行通讯错误。
CPU •部件异常AL.E0再生制动电流过大警告可能会超出内置再生制动电阻或外部再生制动选件的制动能力。
AL.E1过载警告可能发生过载1,过载2报警。
AL.E6伺服紧急停止警告EMG-SG之间断开。
AL.E9主电路OFF警告主电路电源断开时,伺服开启信号(SON)为ON。
哈斯系统报警全参数及排除方法

哈斯系统报警参数及排除方法警报编号和文字:可能的起因以及解决方法101 与电动机控制器在对电动机控制器印刷电路板和主处理器之间的通信进行自测发生通信故障试期间,主处理器没有反应,它们中有一个可能坏了。
检查电缆连接和电路板。
102 伺服系统断开说明伺服电动机断开,刀具交换装置失效,冷却剂泵断开、以及芯轴电动机停机。
因EMERGENCY STOP(紧急停机)、电动机故障、刀具交换装置问题、或电源故障造成。
103 X轴伺服误差太大 X轴电动机负荷过大或速度过快。
电动机位置与指令位置之间的差异超过了参数。
伺服机构将被断开,必须RESET(复位)以重新起动。
此警报可由驱动器、电动机、或撞到机械止动器的滑动装置引起。
电动机还可能失速、断开连接。
或者是驱动器发生故障。
104 Y轴伺服误差过大与警报103相同。
105 Z轴伺服误差过大与警报103相同。
106 A轴伺服误差过大与警报103相同。
107 紧急断电 EMERGENCY STOP(紧急停机)按钮被按下。
在E-STOP(紧急停机)被释放后,必须按一次RESET(复位)按钮以纠正这种情况并清除E-STOP警报。
此警报也有可能在液压平衡系统低电压时被触发。
在这种情况下,在状况得到纠正之前警报不会复位。
108 X轴伺服机构过载 X轴电动机负荷过大。
如果电动机上的负荷大到超过电动机的固定负荷状态时便会出现这种情况。
这段时间可能只有几秒钟或几分钟。
发生这种情况时伺服机构将被断开。
这可能是由于撞到机械止动装置而造成的。
也可能是由于对电动机产生极高负荷的任何情况造成。
109 Y轴伺服机构过载与警报108相同。
110 Z轴伺服机构过载与警报108相同。
111 A轴伺服机构过载与警报108相同。
112 没有中断电子故障。
请与你的经销商联系。
113 转动架收回故障刀具交换装置不能完全抵达右侧。
在刀具交换装置的一次操作中,刀具进/出转动架无法抵达IN(收回)位置。
参数62和63可调节延迟。
富士伺服驱动器报警代码
富士伺服驱动器报警代码一、报警显示的含义序号 显示名称说明种类 1 oc1 过电流1 重大故障2 oc2 过电流23 oS 超速4 Hu 过电压5 Et1 编码器异常16 Et2 编码器异常27 ct 控制电路异常8 dE 存储器异常9 Fb 保险丝断 10 cE 电机组合异常 11 tH 再生晶体管过热 12 Ec 编码器通信异常 13 ctE CONT 重复 14 oL1 过载1 15 oL2 过载216 rH4 浪涌电流抑制电路异常 17 LuP 主电路电压不足轻微故障18 rH1 内部再生电阻过热 19 rH2 外部再生电阻过热 20 rH3 再生晶体管异常 21 oF 偏差超出 22 AH 放大器过热 23 EH 编码器过热 24 dL1 ABS 数据丢失1 25 dL2 ABS 数据丢失2 26 dL3 ABS 数据丢失3 27 AF 多旋转溢出 28 ' E 初始化错误29 ¯PoF 未给伺服电机通电防撞开关急停30 ¯Pn0 速度零停止(通过输入强制停止信号,以速度零停止) 介质定位装置没有放下 31 =PP1 脉冲列输入运行中 正常状态显示 32=Pot检测正/负方向的超程信号中原点位置时显示(Y 向驱动器显示)二、报警的处理方法:oc1 过电流1:从伺服放大器输出的电流超过规定值oc2 过电流2:原因措施伺服电机的输出配线错误修复动力线(U、V、W)的配线确认电线(目测、导通检查),并更换伺服电机的输出配线短路伺服电机绝缘不良绝缘电阻测定(对地间在数MΩ以上)伺服电机的故障线间电阻测定(各线间为数Ω)再生电阻器的电阻值不合适更换为可适用范围的再生电阻器因编码器的异常引起的电流不平稳更换伺服电机未接地线连接地线oS 超速:伺服电机的转速超过最高速度的1.1倍原因措施伺服电机的输出配线错误修复动力线(U、V、W)的配线伺服电机的转速超速●延长PA1_37:加速时间●增大PA1_52:一次延迟S形时间常数●提高PA1_15:自整定增益1Hu 过电压:伺服放大器内部直流电压高于上限值原因措施电源电压过高(刚接通电源后)●确认电源电压在规格范围内●若有功率改进用电容器则插入电抗器外部再生电阻器的未连接或误配线连接外部再生电阻器再生晶体管破损更换伺服放大器Et1 编码器异常1:编码器的1转位置检测异常Et2 编码器异常2 :编码器存储数据的读取异常原因措施来自编码器的数据异常使用屏蔽线以免爱噪音影响编码器出现故障更换伺服电机ct 控制电路异常:伺服放大器内部的控制电源电压存在异常,内部电路有出现的故障的可能性原因措施伺服放大器出现故障即使再次接通电源也未恢复时,更换伺服放大器dE 存储器异常:伺服放大器内保存参数数据损坏原因措施存储器的内容已破损●在PC加载器上读取参数,再设定以红字显示的参数●实行参数的初始化●采取上述对策后仍未恢复,则更换伺服放大器参数的改写次数超过10万次更换伺服放大器Fb 保险丝断:伺服放大器主电路的保险丝断线原因措施保险丝断线更换伺服放大器cE 电机组合异常:连接的伺服电机与伺服放大器的功率、型号不同原因措施伺服电机与伺服放大器的功率、型号不同确认伺服电机及伺服放大器功率、型号tH 再生晶体管过热:内置于伺服放大器的再生处理用晶体管过热原因措施电源电压过高(刚接通电源后)●确认电源在规格范围值内●若有功率改进用电容器则插入电抗器再生电力过大●延长减速时间●降低伺服电机的转速●延长停止时间降低再生频度Ec 编码器通信异常:未能与伺服电机内部的编码器通信原因措施编码器的串行通信异常●电线的确认(目测、导通校验)与修复●确认并修复编码器电缆的断线状态配线断线或接触不良●插入铁氧体磁心ctE CONT重复:伺服放大器的指令序列输入端子的分配重复原因措施多个端子分配同一输入信号CONT信号设定时不要设定同一序号oL1 过载1:轴锁定等在短时间检测出的报警oL2 过载2:转矩的有效值超过伺服电机的容许值原因措施伺服电机不能机械性旋转●确认并修复动力线(U、V、W)的配线●确认制动器是否在运行较之伺服电机功率机械系统较重●根据负载率重新检查伺服电机功率●若转速低则装入减速机●升降机械停止时以制动器保持加减速频度及运行频度高延长单循环时间,降低运行频度伺服放大器破损更换伺服放大器LuP 主电路电压不足:供给伺服放大器的主电源低于规格范围内的最低电压原因措施因瞬间断电等引起的电源电压下降●确认是否会发生瞬间断电的电源环境,改善电源环境●电源功率及变压器功率的确认及其改善rH1 内部再生电阻过热:内置于伺服放大器的再生电阻器的电力消耗量超过上限值原因措施电源电压过高(刚接通电源后)●确认电源电压在规格值内●若有功率改进用电容器则插入电抗器根据上下搬运及卷绕用途不可消耗再生电力●延长减速时间●降低伺服电机的转速●延长单循环时间,降低运行频度未连接再生电阻正确连接,将PA2_65置于0或2rH2 外部再生电阻过热:外部再生电阻过热信号(b接点信号)运行(释放)原因措施电源电压过高(刚接通电源后)确认电源电压在规格值内根据上下搬运及卷绕用途不可消耗再生电力●延长减速时间●降低伺服电机的转速●延长单循环时间,降低运行频度●提高外部再生电阻器的功率●安装配重外部再生电阻过热信号的误配线正确连接rH3 再生晶体异常:伺服放大器内置的再生处理用晶体管出现故障原因措施再生晶体管发生短路故障因再次接通电源重新显示时,更换伺服放大器注意:若再生晶体管发生生短路故障则有可能引起火,因此再生晶体管异常报警信号输出时请迅速将主电源置于OFFrH4 浪涌电流抑制电路异常:抑制电源接通时的浪涌电流的伺服放大器内部电路有可能发生故障原因措施伺服放大器出现故障更换伺服放大器周围温度超过55℃●将周围温度保持在40℃以下●若伺服放大器附近存在发热体则拉开距离注意:若周围温度在55℃以内,检测到该报警的情况下,不要再次运行,请更换伺服放大器oF 偏差超出:偏差超出检测值设定的伺服电机旋转量的位置偏差量累计于伺服放大器内部原因措施确认并修复动力线(U、V、W)的配线动力配线的连接错误(将伺服ON置于ON时发生报警)伺服电机不能机械性旋转确认制动器是否在运行输出转矩小增大PA1_27,28 :转矩值限制值偏差超出检测宽度小增大PA2_69:偏差超出检测值成为P控制状态将P运行信号OFF增益低实施增益调整脉冲列频率的加减速过急延长加减速时间AH 放大器过热:伺服放大器超过容许温度原因措施周围温度超过55℃●将周围温度保持在40℃以下●若伺服放大器附近存在发热体则拉开距离注意:有可能在有效转矩超过100%的情况下使用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Acknow-ledge withNotnecessaryE01Not configured.Configure.Quit Machine zero initiator not found.Error is only generated when using reversing initiators.Check programmed arithmetic.(more accurate cause shown in the optimizing display P233/243=39; see Page 133)E08Synchronous STOP present Check P219Quit E09Drive not running.Remove mechanical blockage (tools,foreign bodies).Quit Lag error too large.Check mechanics for smooth operation,reduce loadoror feed force or increase P13.speed difference too greatThis error message can be turned off by setting P13="0".E11Programmed position not reached.Remove mechanical obstacles or increase P14.Quit Error in 2nd position measuring system.The data record number selected does not exist.The data record number selected is too large.64E18The maximum data record 250 is Free data record 250.Quit E19already assigned.Delete data records or entire data record memory.QuitNo space available in data record memory.Target position beyond positive end limit.Target position beyond negative end limit.E22Machine zero is not approached.Find machine zero.This must be found after power on.QuitAcknow-ledge with•Positioning command in the speed control mode.• Approach MZ in speed control mode.• Travel command when drive is switched off.No.Cause ActionE00Interruption of a positioning command using STOP / BREAK; is only reported via RS232.E05Check initiator.QuitE10QuitE15Check configuration and wiring.QuitE07Calculation error QuitE17Select data record number between 1...250.QuitE16Select data record number between 1...250.QuitQuitE20Correct target position.QuitNo.Cause ActionE23The current command is not allowed.E21Correct target position.Quit敲S30,回車,顯示報警資訊,对应报警信息查询PDF文档“HAUSER USER GUIDE(P213,P214,P215)"找出驱动器故障• Hand +/- when an error is present.•More than 8consecutive comparator commands(preparatory commands, see Page 103) in thedatarecord memory.E24The speed selected is not valid.Enter speed between 0...100%.Quit Note end limits and "Software end limit monitoring"chapter in variant documentation.REPEAT without END or GOSUB without RETURN .E27Parameter must not be written.Check parameter.Quit E29Motor values missing.Send unit to HAUSER.Quit E30Hardware fault.Remove extreme external sources of fault.Quit E31Error in parameters.Check parameter.Quit E32Error in parameters.Check parameter.Quit E33Error in program memory.Check data record memory.Quit E34Error in program memory.Check data record memory.Quit E35Hardware fault.Remove extreme external sources of fault.Quit E36Hardware fault.Faulty or incorrect unit hardware.Power on E37Auxiliary voltage +15 V missing.Switch on again.Power on E38Voltage in intermediate circuit too Increase braking and idle times /check mains power.Quithigh; e.g. if braking output is too COMPAX 25XXS: external ballast resistance high. Limits:missing.COMPAX 25XXS: >400V COMPAX 45XXS/85XXS:bridges X2/5-X2/6COMPAX 10XXSL: >400V missing.otherwise: >800VCOMPAX 1000SL: Check value P134.E39Temperature too high (>85°), cycle Increase acceleration times.Quit E40too hard.1000SL X19/24-X19/12, 35XXM: X19/9-/10) not assignedQuitInput "Enable final stage" (45/85S: X3/1-/2;45XXS, COMPAX 85XXS and COMPAX 1000SL!Only with COMPAX 35XXM, COMPAXfinal stage is immediately switched off.Note!With E40 there is no braking delay; theThe input has a direct effect on the hardware.E41Final stage reports error.Check motor and cable for ground fault,shortcircuitQuit E42COMPAX 35XXM: Short circuit of the fault and function;remove extreme externalsourcesQuitballast resistance or undervoltage of fault.24VCheck resolver cable and connector for correct COMPAX 1000SL:connections and faults.Overvoltage or ballast switching A special error code can be found in channel67 ofResolver / sensor error.the optimization display. This meansE25The position selected is not valid.QuitE26Insert END / RETURN command.QuitError No. 1 ... 30: Sensor indicates error Error No. > 30: COMPAX indicates error Error No. =160: Sensor level too high Error No. =161: Sensor level too low(implement level adaptation using parameter P131)Check I/O cables,connectors and external circuits.Note load limits (refer to start-up manual).Positive auxiliary voltage outside tolerances.Negative auxiliary voltage outside tolerances.E46-E95等等E43Output overloaded.QuitE45Switch unit on again.Power onE44Switch unit on again.Power on障Drivevolt.-freenoyesnonononoseebelownoyesnononononononoDrivevolt.-freenono nonono yes yes no no no no no yes yes yesyes yesyes yesyes yes yes。