COSMO-SkyMed-Image_Calibration
磁共振水膜校准作用
磁共振水膜校准作用Magnetic resonance imaging (MRI) is a crucial diagnostic tool in modern medicine. It allows doctors to see detailed images of the inside of the body, helping them to diagnose and treat a wide range of conditions. However, for MRI scans to be accurate, it is essential that the machine is properly calibrated. This is where water phantom calibration comes in.核磁共振成像(MRI)是现代医学中至关重要的诊断工具。
它使医生能够看到身体内部的详细图像,帮助他们诊断和治疗各种疾病。
但是,为了使MRI 扫描准确无误,很重要的一点就是确保设备正确校准。
这就是水膜校准的作用所在。
Water phantom calibration involves the use of a phantom filled with water that mimics the imaging properties of human tissue. By placing this phantom in the MRI machine and running tests, technicians can ensure that the machine is producing accurate images. This calibration process is essential for maintaining the quality and reliability of MRI scans, as even slight inaccuracies can lead to misdiagnosis and improper treatment.水膜校准涉及使用填充有水的模拟人体组织成像特性的模拟体。
基质辅助飞行时间质谱原理
基质辅助飞行时间质谱(MALDI-TOF)是一种常见的质谱分析方法。
它基于一种称为基质辅助激光解析电离(Matrix-Assisted Laser Desorption/Ionization)的原理。
基质辅助激光解析电离原理中,样品(通常是大分子化合物,如蛋白质)被与之混合的基质(通常是气相辅助的有机化合物)分子所包围。
这种基质分子具有较低的离化能,能够吸收激光能量而形成激发态。
当激光照射到样品上时,基质分子被激发,产生部分分子的离子化。
这些离子化的基质分子迅速和样品中的分子相互作用,使得样品分子整体也被离子化。
在基质溶液中,样品分子和基质分子离子化后会形成“飞行时间”较长的离子群。
这些离子通过一个加速器,获得一定的动能,并进入一个飞行管道。
在飞行过程中,离子的飞行速度取决于它们的质荷比。
离子速度越快,质荷比越小。
当离子到达检测器时,通过测量它们到达检测器的时间,可以计算出它们的飞行时间。
由于离子群中含有不同质荷比的离子,所以它们到达检测器的时间也不同。
通过对离子群到达时间的分析,可以确定离子的质荷比,进而得到样品中不同分子的质量。
基质辅助飞行时间质谱能够用于分析生物分子(如蛋白质、多肽、核酸等)的分子量、结构和组成。
它在生物医学领域中有着广泛的应用,如蛋白质组学、药物代谢研究等。
Series 6 电磁炉说明书
Series 6, Induction hob, 60 cm, Black, surface mount without frame PVQ651FC5EHEZ390090 Wok para radiantes e inducciónHEZ390210 Sartén antiadherente de 15 cm. de base. HEZ9ES100 Cafetera 4 tazasHEZ9FE280 Sartén de hierro Ø 18 / 28 cmHEZ9SE040 set de 4 piezasHEZ9SE060 set de 6 piezas Encimera de inducción con PerfectFry: logra resultados de fritura perfectos gracias al control automático de temperatura.• DirectSelect: Directo, simple selección de la zona de cocción deseada, potencia y funciones adicionales.• CombiZone: más flexibilidad al combinar dos zonas de cocción para cocinar con distribución uniforme del calor, para asadores y similares.• PerfectFry: Para un perfecto dorado de los alimentos gracias al control del sensor con 4 niveles de potencia con ajuste automático• Terminación biselada: diseño limpio con cristal biselado en la parte delantera y los laterales.• PowerBoost: hasta un 50% más de potencia para una cocción más rápida.Familia de Producto: ..........................Placa independie.vitrocerámica Tipo de construcción: .........................................................Integrable Entrada energética: ...............................................................Eléctrico Número de posiciones que se pueden usar al mismo tiempo: . (4)Medidas del nicho de encastre: ...............51 x 560-560 x 490-500 mm Anchura: .................................................................................592 mm Dimensiones aparato (alto, ancho, fondo): ...........51 x 592 x 522 mm Medidas del producto embalado: ........................126 x 753 x 608 mm Peso neto: ...............................................................................11.7 kg Peso bruto: ..............................................................................13.9 kg Indicador de calor residual: .................................................Separado Ubicación del panel de mandos: ...............Frontal de la vitrocerámica Material de la superficie básica: ....................................Vitrocerámica Color de superficie superior: .....................................................Negro Longitud del cable de alimentación eléctrica: ......................110.0 cm Sealed Burners: ..............................................................................No Zonas con booster: ....................................................................Todas Potencia del segundo elemento calentador: ............................3.6 kW Power of heating element (kW in boost): ..............................[3.7] kW Potencia: .................................................................................7400 W Tensión: ..............................................................................220-240 V Frecuencia: ..........................................................................50; 60 Hz Entrada energética: ...............................................................Eléctrico Tipo de clavija: ..................................................................sin enchufe Appliance Dimensions (h x w x d) (in): ..........................................x x Dimensions of the packed product: ....................4.96 x 23.93 x 29.64 Net weight: .........................................................................26.000 lbs Gross weight: .....................................................................31.000 lbs Número de posiciones que se pueden usar al mismo tiempo: . (4)Longitud del cable de alimentación eléctrica: ......................110.0 cm Medidas del nicho de encastre: ...............51 x 560-560 x 490-500 mm Dimensiones aparato (alto, ancho, fondo): ...........51 x 592 x 522 mm Medidas del producto embalado: ........................126 x 753 x 608 mm Peso neto: ...............................................................................11.7 kg Peso bruto: ..............................................................................13.9 kgSeries 6, Induction hob, 60 cm,Black, surface mount without frame PVQ651FC5EEncimera de inducción con PerfectFry: logra resultados de fritura perfectos gracias al control automático de temperatura.Prestaciones profesionalesDiseño:- Terminación biseladaRapidez:- Función Sprint en todas las zonasConfort:- 4 zonas de inducción- DirectSelect con 17 niveles de cocción- 2 Combi zones- 2-steps- Sensores touchControl- Programación de tiempo de cocción para cada zona y avisador acústico- Avisador acústico- sí- síPotencia y tamaño:- Regulación electrónica con 17 niveles de potenciaSeguridad:- Indicador de calor residual dual (H/h)- Main Switch- Detección de recipiente- Posibilidad de limitar la potencia total de la encimera- Desconexión de seguridad de la placa- Bloqueo de seguridad para niños automático o manual- Función Clean: bloqueo temporal del control- Display de consumo de energíaMedidas:- Dimensiones para instalación: (Al/An/F) 51 mm x 560 mm x 490 mm- Dimensiones del producto: (An/F) 592 mm x 522 mm- Min. espesor de mesa: 16 mm- Cable incluido- Potencia de conexión: 7.4 kwSeries 6, Induction hob, 60 cm, Black, surface mount without frame PVQ651FC5E。
ENVI主菜单中英文对照
ENVI主菜单中英文对照1.File 文件Open image file 打开图像文件Open vector file 打开矢量文件Open remote file 打开远程文件Open exteral file 打开特定文件Open previous file 最近使用文件Launch ENVI zoom 启动ENVI zoomEdit ENVI header 编辑头文件Generate test data 生成测试数据Data view 数据浏览Save file as 另存为Import from IDL variable 导入IDL变量Export to IDL variable 导出为IDL变量Compile IDL module 编译IDL程序IDL CPU parameters IDL CPU参数设置Tape utilties:磁带工具Read known tape formats 磁带格式读取各种传感器Read/write ENVI tapes ENVI磁带读写Read ENVI tape 磁带读取Write ENVI files to tape 写入磁带Scan tape and customize dump 浏览磁带并保存Dump tape 转储磁带Scan directory list 扫描目录Change output directory 更改扫描目录Save session to script 作业保存Execute startup script 脚本执行Restore display group 显示恢复ENVI queue manager ENVI队列管理ENVI log manager ENVI日志管理Close all files 关闭所有文件Preferences 参数设置Exit 退出2.Basic tools 基本工具Resize data(spatial/spectral) 数据重采样(空间子集/光谱子集)Subset data via ROIs 通过感兴趣区裁剪数据(选取子集)Rotate/flip data 旋转/翻转数据Layer stacking 图层堆栈Convert data(BSQ ,BIL ,BIP ) 数据格式转换Stretch data 数据拉伸Statistics 统计Compute statistcs 统计计算View statistics 查看统计文件Sum data bands 数据波段求和Generate random sample 生成随机样本Using ground truth classification 基于地表真实分类影像Using ground truth ROIs 基于地表真实感兴趣区Spactial statistics 空间统计Compute global spatial statistics 全局统计Compute local spatial statistics 局部统计Change detection 变化检测Measurement tool 量测工具Band math 波段运算Spectral math 光谱运算Segmentation image 图像分割Region of interest 感兴趣区Rool tool 感兴趣区Restore saved ROI file 打开感兴趣区文件Save ROIs to file 保存为感兴趣区文件Delete ROIs 删除感兴趣区Export ROIs to EVF 将感兴趣区导出为EVFExport ROIs to n-D visualizer 将感兴趣区导出进行n维散度分析Export ROIs to training data 将感兴趣区导出为矢量训练样本Output ROIs to ASCII 将感兴趣区导出为ASCII码文件Reconcile ROIs 调整感兴趣区Reconcile ROIs via map 利用地图调整感兴趣区Band threshold to ROI 利用波段阈值定义感兴趣区Creat class image from ROIs 利用感兴趣区生成分类图像Creat buffer zone from ROIs 利用感兴趣区生成缓冲区Compute ROI separability 计算感兴趣区分离度Mosaicking 图像镶嵌Pixel based 基于像素镶嵌Georeferenced 基于地理坐标镶嵌Tiled quickbird product 产品镶嵌Tiled worldview product 产品镶嵌Masking 掩膜Build mask 建立掩膜Apply mask 应用掩膜Preprocessing 预处理Calibration utilities 定标工具AVHRR Landsat calibration landsat 定标Quickbird radianceWorldview radianceFLAASH 大气纠正Quick atmospheric correction 快速大气校正Flat filed 平面场定标Log residuale 对数残差定标IAR reflectance IAR 反射率定标Empirical line 经验线性定标Thermal atm correction 热红外大气校正TIMS radiance 热红外多波段扫描仪定标Calculate emissivity 发射率计算General purpose utilities 通用工具Replace bad lines 坏行修补Dark substract 黑暗像元法Apply gain and offset 应用增益和偏移校正Destripe 多带噪声去除Cross-tarck Illumination correction 轨道光照修正Convert complex data complex转换Convert vax to IEEE vax转换为IEEEData-specific utilities 特定数据处理工具3.Classification 分类Supervised 监督分类Parallelepiped 平行六面体Minimum distance 最小距离法Mahalanobis distance 马氏距离法Maximum distance 最大似然法Spectral angle mapper 波谱角制图Spectral information divergence 光谱信息散度Binary encoding 二进制编码Netural net 神经网络Support vector machine 支持向量机Unsupervised 非监督分类IsodataK-MeansDecision tree 决策树分类Build new decision tree 新建决策树Edit existing decision tree 编辑决策树Execute existing decision tree 执行决策树Endmember collection 端元收集器Create class image from ROIs 利用感兴趣区生成分类图像Post classification 分类后处理Assign class colors 分类颜色设置Rule classifier 规则分类器Class statistics 分类结果统计Change detection statistics 变化监测统计Confusion matrix 混淆矩阵分析Using ground truth image 基于地表真实影像Using ground truth ROIs 基于地表真实感兴趣区ROC curves ROC曲线Using ground truth image 基于地表真实影像Using ground truth ROIs 基于地表真实感兴趣区Generate random sample 生成随机样本Using ground truth image 基于地表真实影像Using ground truth ROIs 基于地表真是感兴趣区Majority/minority analysis 主要/次要分析Clump classes 分类集群Sieve classes 分类筛选Combine classes 分类合并Overlay classes 分类叠加Buffer zone image 缓冲区分析Segmentation image 图像分割Classification to vector 分类结果转换为矢量4.Transform 变换Image sharpening 图像融合HSV融合Color normalized(Brovey) Brovey融合Gram-schmidt spectral shapening Gram-schmidt融合PC spectial sharpening 主成分分析CN spectial sharpening CN波谱融合Band ratios 波段比Principal components 主成分分析Forward PC rotation 正向主成分分析Compute new statistics and rotate 计算统计值分析PC rotation from existing stats 现有统计值分析Inverse PC rotation 反向主成分分析变换Independent components独立主成分分析Forward IC rotation 独立主成分分析Compute new stats and rotate 计算统计值分析IC rotation from existing stats 现有统计值分析IC rotation from existing transformInverse IC rotation 反向独立主成分分析变换MNF rotation MNF变换(最小噪声分离)Forward MNF 正向MNF变换Estimate noise statistics from data 估算噪声分析Previous noise statistics 历史噪声统计Noise statistics from dark data 黑区图像估计噪声Inverse MNF transform 反向MNF变换Apply forward MNF to spectra 波谱应用正向MNF变换Apply inverse MNF to spectra 波谱应用反向MNF变换Color transforms 颜色空间变换RGB to HSVHSV to RGBHLS to RGBHSV to RGBDecorrelation stretch 去相关拉伸Photographic stretch 摄影拉伸Saturation stretch 饱和度拉伸Synthetic color image 合成彩色影像NDVITasseled cap 缨帽变换5.Filter 过滤器Convolutions and morphology 卷积滤波Texture 纹理分析Occurrence measures 概率统计Co-occurrence measures 二阶概率统计Adaptive 自适应滤波Lee Enhanced lee增强 lee 滤波Frost Enhanced frost 增强 forst 滤波Grmma、Kuan、Local sigma、Bit errorsFFT filtering 傅立叶变换滤波Forward EET 正向傅立叶变换Filter definition 滤波器自定义Inverse FFT 反向傅立叶变换6.Spectial 波谱工具SPEAR tools SPEAR工具THOR workflows 流程化高光谱工具Target detection wizard 目标检测向导Spectial libraries 波谱库Spectial slices 波谱切割MNF rotation MNF变换(最小噪声分离)Pixel purity index 纯净像元指数PPIn-Dimensional visualizer n维数据可视化Mapping methods 制图方法Vegetation analysis 植被分析Vegetation suppression 植被抑制SAM target finder with bandmax 基于bandMax的SAM目标查找提取RX anomaly detection RX异常检测Spectral hourglass wizard 波谱沙漏向导Automated spectial hourglass 自动波谱沙漏向导Spectral analyst 波谱分析Multi range SFF 多谱段SFFSMACC endmember extraction SMACC端元提取Spectial math 波谱运算Spectral resampling 波普重采样Gram-schmidt spectial sharpening Gram-schmidt 波谱融合PC spectial sharpening PC波段融合CN spectial sharpening CN波段融合EFFORT polishing EFFORT 波谱打磨FLAASH FLAASH大气校正Quick atmospheric correction 快速大气校正Build 3D cube 建立3D立方体Preprocessing 预处理Calibration utilitiesAVHRRLandsat calibrationQUickbird radianceWorldview radianceFLAASHQuick atmospheric correctionFlat filedLog residualeIAR reflectanceEmpirical lineThermal atm correctionTIMS radianceCalculate emissivityGeneral purpose utilitiesReplace bad linesDark substractApply gain and offsetDestripeCross-tarck illumination correctionConvert complex dataConvert vax to IEEEData-specific utilities7.Map (配准与镶嵌)Registration 几何校正Rigorous orthorectification 严格模型正射校正Orthorectification 正射校正Mosaicking 图像镶嵌Georeference from input geometry 输入几何文件进行几何校正 Georeference SPOT SPOT几何校正Georeference SeaWiFS SeaWiFS几何校正Georeference ASTER ASTER几何校正Georefencece AVHRR AVHRR几何校正Georeference ENVISAT ENVISAT几何校正Georeference MODIS MODIS几何校正Georeference COSMO-SkyMed(DGM) DGM几何校正Georeference RADARSAT RADARSAT几何校正Build RPCs 构建RPCsCustomize map projections 自定义地图投影Convert map projection 地图投影转换Layer stacking 波段组合Map coordinate converter 地图坐标转换ASCII coordinate conversion ASCII坐标转换Merge old “map_proj.txt” file 合并原有map_proj.txt文件GPS-Link GPS连接8.Vector 矢量工具Open vector image 打开矢量文件Create new vector layer 新建矢量层Using existing vector layer 基于现有矢量层Using raster image file 基于栅格图像文件Using user defined parameters 基于用户自定义参数Create world boundaries 创建世界边界Available vectors list 当前矢量列表Intelligent digitizer 智能数字化工具Raster to vector 栅格转矢量Classification to vector 分类结果矢量化Rasterize point data 离散点栅格化Convert contours to DEM 等高线转为DEM9.Topographic 地形工具Open topographic file 打开地形文件Topographic modeling 地形模型Topographic features 地貌特征分析DEM extraction DEM提取DEM提取向导;提取向导;使用现有文件;选择立体控制点对;选择立体匹配点;构建核面图像;提取DEM;编辑DEM;立体3D测量;3D核面指针Create hill shade image 山体阴影图生成Replace bad values 坏值替换Rasterize point data 离散点栅格化Convert contours to DEM 等高线转为DEM3D SurfaceView 3D曲面浏览Outil bathym rie10.Radar 雷达工具Open/prepare radar file 打开/预处理雷达数据文件Calibration 定标Beta noughtSigma noughtAntenna pattern correction 天线阵列校正Slant-to-ground range 斜地校正Incidence angle image 入射角图像Adaptive filters 自适应滤波Texture filters 纹理滤波Synthetic color image 彩色图像合成Polarimetric tools 极化分析工具Synthesize AIRSAR Data AIRSAR数据合成Synthesize SIR-C data SIR-C数据合成Extract polarization sigbatures 极化信号提取Multilook compressed data 数据压缩多视Phase image 相位图像Pedestal height image 图像消隐脉冲高度AIRSAR scattering classification AIRSAR散射机理分析TOPSAR tools TOPSAR工具Open TOPSAR file 打开TOPSAR文件Convert TOPSAR data 打开TOPSAR数据DEM replace bad value DEM坏值替换11.window 窗口Window finder 查找窗口Start new display window 新建显示窗口Start new vector window 新建矢量窗口Start new plot window 新建绘图窗口Start 3D liDAR viewer LiDAR三维浏览器Available files list 当前文件列表Available bands list 当前波段列表Available vectors list 当前矢量列表Remote connection manager 远程连接管理Mouse button descriptions 鼠标按键说明Display information 显示信息Cursor location/value 光标定位/数值信息Point collection 点收集Maximize open displays 显示窗口最大化Link diaplays 关联显示Close all display windows 关闭所有显示窗口Close all plot windows 关闭所有绘图窗口。
法国研制出高清晰度皮肤湿度图像仪

法国研制出高清晰度皮肤湿度图像仪
佚名
【期刊名称】《中国科学美容》
【年(卷),期】2002(000)010
【总页数】1页(P114)
【正文语种】中文
【中图分类】TS974.1
【相关文献】
1.基于无线传输和图像控制技术的SF6湿度检测仪 [J], 王洪元;乔辉;潘操
2.基于无线传输和图像控制技术的SF_6湿度检测仪 [J], 王洪元;乔辉;潘操
3.组合无创皮肤测试仪结合IPP图像分析系统评价美白化妆品的功效 [J], 刘艳红;唐嘉雯;李雪竹
4.高清晰度x射线-可见图像LccLV投影仪 [J], 史永基;史建军;史红军
5.法国研制出光子捕获仪实现爱因斯坦愿望 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
ENVI主菜单中英文对照

Occurrence measures概率统计
Co-occurrence measures二阶概率统计
Adaptive自适应滤波
LeeEnhancedlee增强lee滤波
FrostEnhanced frost增强forst滤波
Grmma、Kuan、Local sigma、Bit errors
HSV to RGB
Decorrelation stretch去相关拉伸
Photographic stretch摄影拉伸
Saturation stretch饱和度拉伸
Synthetic color image合成彩色影像
NDVI
Tasseled cap缨帽变换
5.Filter过滤器
Convolutions and morphology卷积滤波
Thermal atm correction热红外大气校正
TIMS radiance热红外多波段扫描仪定标
Calculate emissivity发射率计算
General purpose utilities通用工具
Replace bad lines坏行修补
Dark substract黑暗像元法
Apply gain and offset应用增益和偏移校正
Destripe多带噪声去除
Cross-tarck Illumination correction轨道光照修正
Convert complex data complex转换
Convert vax to IEEE vax转换为IEEE
Data-specific utilities特定数据处理工具
3.Classification分类
眼见为实:超高速视频级原子力显微镜实时成像CRISPR基因编辑过程

眼见为实:超高速视频级原子力显微镜实时成像观察CRISPR基因编辑过程北京佰司特科技有限责任公司自2012年以来,研究人员常用一种叫做CRISPR的强大“基因组编辑”技术对生物的DNA序列进行修剪、切断、替换或添加。
CRISPR来自微生物的免疫系统,这种工程编辑系统利用一种酶,能把一段作为引导工具的小RNA切入DNA,就能在此处切断或做其他改变。
CRISPR已经成为生命科学领域受关注的基因编辑技术,其效果得到大家一致认可。
虽然科学家可通过RT-PCR、WB等方法间接证明CRISPR的功能,但仍未有直接的证据来证实。
究其原因:一是生物分子间的相互作用速率快,需要高速的成像手段才能捕捉到;二是生物分子比较小,通常为纳米级,普通显微镜由于受光学衍射限所限不能分辨。
日本Kanazawa University的科学家利用超高速视频级原子力显微镜(High-Speed Atomic Force Microscope,HS-AFM)实时成像,成功观察到了CRISPR基因编辑的过程,为CRISPR技术的有效性提供了直接的证据。
超高速视频级原子力显微镜(High-Speed Atomic Force Microscope,HS-AFM)由日本Kanazawa 大学Prof. Ando 教授团队研发,日本RIBM公司(生体分子计测研究所株式会社,Research Institute of Biomolecule Metrology Co., Ltd)商业化的产品,可以达到视频级成像的商业化原子力显微镜。
HS-AFM突破了传统原子力显微镜“扫描成像速慢”的限制,能够在液体环境下超快速动态成像,分辨率为纳米水平。
样品无需特殊固定,不影响生物分子的活性,尤其适用于生物大分子互作动态观测。
超高速视频级原子力显微镜HS-AFM主要有两种型号,SS-NEX样品扫描(Sample-Scanning HS-AFM)以及PS-NEX 探针扫描(Probe-Scanning HS-AFM)。
Cosno
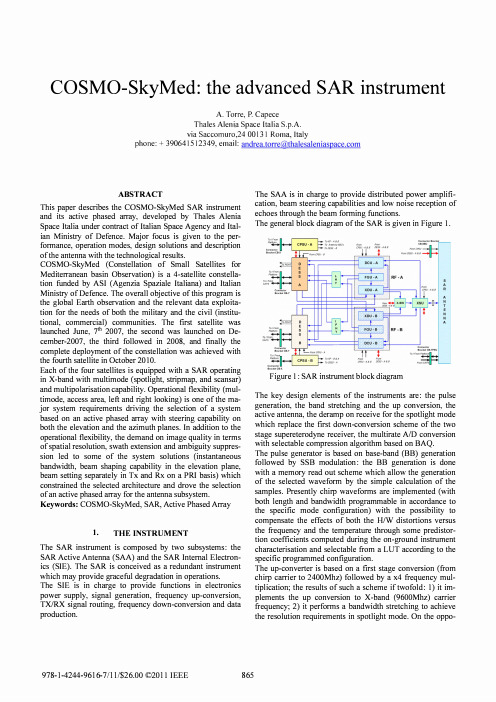
The SAA is in charge to provide distributed power amplifi cation, beam steering capabilities and low noise reception of echoes through the beam forming functions. The general block diagram of the SAR is given in Figure 1.
email: andrea.torre@
ABSTRACT
This paper describes the COSMO-SkyMed SAR instrument and its active phased array, developed by Thales Alenia Space Italia under contract of Italian Space Agency and Ital ian Ministry of Defence. Major focus is given to the per formance, operation modes, design solutions and description of the antenna with the technological results. COSMO-SkyMed (Constellation of Small Satellites for Mediterranean basin Observation) is a 4-satellite constella tion funded by ASI (Agenzia Spaziale Italiana) and Italian Ministry of Defence. The overall objective of this program is the global Earth observation and the relevant data exploita tion for the needs of both the military and the civil (institu tional, commercial) communities. The first satellite was launched June, 7th 2007, the second was launched on De cember-2007, the third followed in 2008 , and finally the complete deployment of the constellation was achieved with the fourth satellite in October 2010. Each of the four satellites is equipped with a SAR operating in X-band with multimode (spotlight, stripmap, and scansar) and multipolarisation capability. Operational flexibility (mul timode, access area, left and right looking) is one of the ma jor system requirements driving the selection of a system based on an active phased array with steering capability on both the elevation and the azimuth planes. In addition to the operational flexibility, the demand on image quality in terms of spatial resolution, swath extension and ambiguity suppres sion led to some of the system solutions (instantaneous bandwidth, beam shaping capability in the elevation plane, beam setting separately in Tx and Rx on a PRJ basis) which constrained the selected architecture and drove the selection of an active phased array for the antenna subsystem. Keywords: COSMO-SkyMed, SAR, Active Phased Array
美丽策美容护肤技术原理深度剖析

清除痤疮:青春痘、暗疮、粉刺;脱敏、黑斑 改善融斑、美白、亮肤、收缩毛孔、面色灰黄、神经麻木 消除皱纹、疲劳、舒缓压力、改善睡眠 修复受损皮肤,细化皱纹,表情纹,增加皮肤弹性,改善皮肤松弛 适用人群:痤疮,粉刺,脓包,发红丘疹型青春痘,不愿或者不适应应用口服药物者,化妆 品不适应者,皮肤过敏者。 红外光(波长/入=830-880nm) 透过共鸣吸收,分子之间摩擦生热从而形成热反应,促使皮下深层温度上升,并使微血管扩 张,加速血液循环,有利于清除血管囤积物及体内有害物质,将妨害新陈代谢的障碍清除, 重新使组织复活,促进酵素生成,达到活化组织细胞、防止老化、强化免疫系统的目的。 临床适应范围:改善微循环系统、促进新陈代谢、激活了生物大分子的活性。 黄光(波长/入=590-600nm) 改善细胞氧的交替功能,激励微循环,分解色素、促进淋巴排毒,改善皮肤粗糙、红斑、循 环不佳等。 临床适应范围:皮肤暗哑、松弛、面色暗黄。 功能模式 净痘, 淡斑, 消纹, 亮肤四大核心功能, 依据使用者的年龄, 性别以及种族的不同肤质特征, 美丽策对产品进行了更加细致的划分, 其中包括肌肤性质, 时间长短, 护理区域的强度选择。 从而达到使用者在使用时间及产品功效上有一个可自行调节的空间。
பைடு நூலகம்
实现方法 通过生物刺激原理(非生物破坏性) ,采用固定的二极体低能量光线(415nm 蓝光、460nm 蓝光、590nm 黄光、630nm 红光、660nm 红光、850nm 红外光及 940nm 红外光)取代镭 射光源来达到改善细胞效果。 通过这些光源作用于真皮层及更深层次, 激活沉睡的结缔组织 细胞,让其最大化发挥自身活力合成胶原蛋白和弹力蛋白,激活细胞更新速度,达到产生胶 原蛋白、促进新陈代谢、加快血液循环之功用,从而激活皮肤组织的活力,从而达到美肤效 果。 。 胶原蛋白和弹力蛋白作用 胶原蛋白和弹性蛋白是在皮肤真皮层中合成的结构性蛋白质。 对保持皮肤光滑, 柔软和富有 弹性很重要。人体能自然产生胶原和弹性蛋白,但这种能力会随着年老而降低。年轻人的皮 肤中含这些结构性蛋白质数量比较多, 但它们会随着年龄增长儿逐渐减少, 并因此引起皱纹 和皮肤下垂。 而过度晒太阳, 饮食不良和吸烟等因素也可以加快降低这些蛋白质的生产能力。 特定药物和食物有助于促进提高皮肤内这些蛋白质的生产能力。 通常是由叫做成纤维细胞的 真皮细胞自然产生胶原和弹性蛋白。 胶原蛋白负责保持皮肤圆润, 而弹性蛋白负责构建纤维 块,让皮肤保持灵活和弹性。
sentinel-1数据处理技术文档
Sentinel-1工具箱教程(SAR Basics with the Senintel-1 Toolbox in SNAP)在单元senintel-1 SAR基本工具箱,本教程将指导你通过使用与工具箱的特区产品的基本知识。
本教程包括校准、multilooking,滤波,和SAR数据产品地形校正。
(如pdf1)Sentinel-1带式干涉测量(Sentinel-1 Stripmap Interferometry)本教程走过带式干涉测量在2014纳帕谷地震为例。
本教程涵盖了创建子集,配准,光谱滤波,干涉形成,相干估计,地形相位去除、相位滤波、相位解缠。
(如pdf2)Sentinel-1 TOPSAR干涉(Sentinel-1 TOPSAR Interferometry)本教程走过特殊考虑与S-1顶部数据InSAR的时候。
情况看起来在2014福戈岛火山喷发。
本教程包括打开和查看顶部SLC数据配准,顶部,采用精密轨道,顶裂,backgeocoding,干涉形成,相干估计,顶deburst,地形相位去除、相位滤波。
RADARSAT-2干涉(Radarsat-2 Interferometry)本教程介绍一种干涉处理的例子Radarsat-2产品。
本教程涵盖了InSAR,订购RS2产品创建子集,配准,光谱滤波,干涉形成,相干估计,地形相位去除、相位滤波、相位解缠。
SAR极化(SAR Polarimetry)本教程演示如何使用全极化RADARSAT-2极化数据的工作产品。
本教程包括开放Radarsat-2产品,创建复杂的数据子集,校准,极化矩阵的生成、极化滤波、极化分解、数据类型转换和非监督Wishart分类。
ALOS PALSAR正射纠正(ALOS PALSAR Orthorectification)本教程演示如何正射纠正ALOS-1 SAR产品。
它包括开放ALOS产品、校准、multilooking,斑点滤波、倾斜校正、地形校正值。
Envi软件界面中英文对比参考表
对两幅图像直接生成变化图像 对两个分类后的数据生成土地利用转移矩阵 启动直接比较法动态检测流程化工具 启动分类后比较法动态检测流程化工具 启动图像分类流程化工具 启动图像决策树分类工具 收集端元波谱,用于分类和高光谱分析 对分类结果进行后处理 对图像进行灰度分割 启动监督分类模块,包括 12 种分类器 启动非监督分类模块,包括 2 种分类器
Extensions(扩展工具) Anomaly Detection 工具箱及其功能
启动用户自定义的扩展功能 启动异常检测流程化工具 启动 RX 异常检测工具 自定义简单或复杂的处理程序进行波段间运算 波段之间的比值运算
Anomaly Detection Workflow(异常检测流程化工具) RX Anomaly Detection(RX 异常检测) Band Ratio 工具箱及其功能 Band Math(波段运算) Band Ratios(波段比值) Change Detection 工具箱及其功能 Change Detection Difference Map (直接比较法生成变 化图像) Change Detection Statistics(分类后处理变化统计) Image Change Workflow(直接比较法流程化工具) Thematic Change Workflow(分类后比较流程化工具) Classification 工具箱及其功能 Classification Workflow(图像分类流程化工具) Decision Tree(决策树分类) Endmember Collection(端元波谱收集器) Post Classification(分类后处理) Raster Classification(灰度分割) Supervised Classification(监督分类) Unsupervised Classification(非监督分类) Feature Extraction 工具及其功能 Example Based Feature Extraction Workflow(基于样本 的面向对象信息提取工具) Rule Based Feature Extraction Workflow(基于规则的面 向对象信息提取工具) Segment Only Feature Extraction Workflow (对象提取工 具) Segment Image(图像分割) Filler 工具箱及其工具 Bit Error Filter (位误差滤波) Co-occurrence Measures(基于二阶概率统计的滤波) Convolutions and Morphology(卷积与形态学滤波) Enhanced Frost Filter(增强的 Frost 滤波) Enhanced Lee Filter(增强的 Lee 滤波) FFT(Forward) (傅里叶变换) FFT(Inverse) (反向傅里叶变换) FFT Filter Definition(定义傅里叶变换核) Frost Filter(Frost 滤波) Gamma Filter(Gamma 滤波) Kuan Filter(Kuan 滤波) Lee Filter(Lee 滤波) Local Sigma Filter(Local Sigma 滤波)
ENVI主菜单中英文对照

ENVI主菜单中英文对照1.File 文件Open image file 打开图像文件Open vector file 打开矢量文件Open remote file 打开远程文件Open exteral file 打开特定文件Open previous file 最近使用文件Launch ENVI zoom 启动ENVI zoomEdit ENVI header 编辑头文件Generate test data 生成测试数据Data view 数据浏览Save file as 另存为Import from IDL variable 导入IDL变量Export to IDL variable 导出为IDL变量Compile IDL module 编译IDL程序IDL CPU parameters IDL CPU参数设置Tape utilties:磁带工具Read known tape formats 磁带格式读取各种传感器Read/write ENVI tapes ENVI磁带读写Read ENVI tape 磁带读取Write ENVI files to tape 写入磁带Scan tape and customize dump 浏览磁带并保存Dump tape 转储磁带Scan directory list 扫描目录Change output directory 更改扫描目录Save session to script 作业保存Execute startup script 脚本执行Restore display group 显示恢复ENVI queue manager ENVI队列管理ENVI log manager ENVI日志管理Close all files 关闭所有文件Preferences 参数设置Exit 退出2.Basic tools 基本工具Resize data(spatial/spectral) 数据重采样(空间子集/光谱子集)Subset data via ROIs 通过感兴趣区裁剪数据(选取子集)Rotate/flip data 旋转/翻转数据Layer stacking 图层堆栈Convert data(BSQ ,BIL ,BIP ) 数据格式转换Stretch data 数据拉伸Statistics 统计Compute statistcs 统计计算View statistics 查看统计文件Sum data bands 数据波段求和Generate random sample 生成随机样本Using ground truth classification 基于地表真实分类影像Using ground truth ROIs 基于地表真实感兴趣区Spactial statistics 空间统计Compute global spatial statistics 全局统计Compute local spatial statistics 局部统计Change detection 变化检测Measurement tool 量测工具Band math 波段运算Spectral math 光谱运算Segmentation image 图像分割Region of interest 感兴趣区Rool tool 感兴趣区Restore saved ROI file 打开感兴趣区文件Save ROIs to file 保存为感兴趣区文件Delete ROIs 删除感兴趣区Export ROIs to EVF 将感兴趣区导出为EVFExport ROIs to n-D visualizer 将感兴趣区导出进行n维散度分析Export ROIs to training data 将感兴趣区导出为矢量训练样本Output ROIs to ASCII 将感兴趣区导出为ASCII码文件Reconcile ROIs 调整感兴趣区Reconcile ROIs via map 利用地图调整感兴趣区Band threshold to ROI 利用波段阈值定义感兴趣区Creat class image from ROIs 利用感兴趣区生成分类图像Creat buffer zone from ROIs 利用感兴趣区生成缓冲区Compute ROI separability 计算感兴趣区分离度Mosaicking 图像镶嵌Pixel based 基于像素镶嵌Georeferenced 基于地理坐标镶嵌Tiled quickbird product 产品镶嵌Tiled worldview product 产品镶嵌Masking 掩膜Build mask 建立掩膜Apply mask 应用掩膜Preprocessing 预处理Calibration utilities 定标工具AVHRR Landsat calibration landsat 定标Quickbird radianceWorldview radianceFLAASH 大气纠正Quick atmospheric correction 快速大气校正Flat filed 平面场定标Log residuale 对数残差定标IAR reflectance IAR 反射率定标Empirical line 经验线性定标Thermal atm correction 热红外大气校正TIMS radiance 热红外多波段扫描仪定标Calculate emissivity 发射率计算General purpose utilities 通用工具Replace bad lines 坏行修补Dark substract 黑暗像元法Apply gain and offset 应用增益和偏移校正Destripe 多带噪声去除Cross-tarck Illumination correction 轨道光照修正Convert complex data complex转换Convert vax to IEEE vax转换为IEEEData-specific utilities 特定数据处理工具3.Classification 分类Supervised 监督分类Parallelepiped 平行六面体Minimum distance 最小距离法Mahalanobis distance 马氏距离法Maximum distance 最大似然法Spectral angle mapper 波谱角制图Spectral information divergence 光谱信息散度Binary encoding 二进制编码Netural net 神经网络Support vector machine 支持向量机Unsupervised 非监督分类IsodataK-MeansDecision tree 决策树分类Build new decision tree 新建决策树Edit existing decision tree 编辑决策树Execute existing decision tree 执行决策树Endmember collection 端元收集器Create class image from ROIs 利用感兴趣区生成分类图像Post classification 分类后处理Assign class colors 分类颜色设置Rule classifier 规则分类器Class statistics 分类结果统计Change detection statistics 变化监测统计Confusion matrix 混淆矩阵分析Using ground truth image 基于地表真实影像Using ground truth ROIs 基于地表真实感兴趣区ROC curves ROC曲线Using ground truth image 基于地表真实影像Using ground truth ROIs 基于地表真实感兴趣区Generate random sample 生成随机样本Using ground truth image 基于地表真实影像Using ground truth ROIs 基于地表真是感兴趣区Majority/minority analysis 主要/次要分析Clump classes 分类集群Sieve classes 分类筛选Combine classes 分类合并Overlay classes 分类叠加Buffer zone image 缓冲区分析Segmentation image 图像分割Classification to vector 分类结果转换为矢量4.Transform 变换Image sharpening 图像融合HSV融合Color normalized(Brovey) Brovey融合Gram-schmidt spectral shapening Gram-schmidt融合PC spectial sharpening 主成分分析CN spectial sharpening CN波谱融合Band ratios 波段比Principal components 主成分分析Forward PC rotation 正向主成分分析Compute new statistics and rotate 计算统计值分析PC rotation from existing stats 现有统计值分析Inverse PC rotation 反向主成分分析变换Independent components独立主成分分析Forward IC rotation 独立主成分分析Compute new stats and rotate 计算统计值分析IC rotation from existing stats 现有统计值分析IC rotation from existing transformInverse IC rotation 反向独立主成分分析变换MNF rotation MNF变换(最小噪声分离)Forward MNF 正向MNF变换Estimate noise statistics from data 估算噪声分析Previous noise statistics 历史噪声统计Noise statistics from dark data 黑区图像估计噪声Inverse MNF transform 反向MNF变换Apply forward MNF to spectra 波谱应用正向MNF变换Apply inverse MNF to spectra 波谱应用反向MNF变换Color transforms 颜色空间变换RGB to HSVHSV to RGBHLS to RGBHSV to RGBDecorrelation stretch 去相关拉伸Photographic stretch 摄影拉伸Saturation stretch 饱和度拉伸Synthetic color image 合成彩色影像NDVITasseled cap 缨帽变换5.Filter 过滤器Convolutions and morphology 卷积滤波Texture 纹理分析Occurrence measures 概率统计Co-occurrence measures 二阶概率统计Adaptive 自适应滤波Lee Enhanced lee增强 lee 滤波Frost Enhanced frost 增强 forst 滤波Grmma、Kuan、Local sigma、Bit errors FFT filtering 傅立叶变换滤波Forward EET 正向傅立叶变换Filter definition 滤波器自定义Inverse FFT 反向傅立叶变换6.Spectial 波谱工具SPEAR tools SPEAR工具THOR workflows 流程化高光谱工具Target detection wizard 目标检测向导Spectial libraries 波谱库Spectial slices 波谱切割MNF rotation MNF变换(最小噪声分离)Pixel purity index 纯净像元指数PPIn-Dimensional visualizer n维数据可视化Mapping methods 制图方法Vegetation analysis 植被分析Vegetation suppression 植被抑制SAM target finder with bandmax 基于bandMax的SAM目标查找提取RX anomaly detection RX异常检测Spectral hourglass wizard 波谱沙漏向导Automated spectial hourglass 自动波谱沙漏向导Spectral analyst 波谱分析Multi range SFF 多谱段SFFSMACC endmember extraction SMACC端元提取Spectial math 波谱运算Spectral resampling 波普重采样Gram-schmidt spectial sharpening Gram-schmidt 波谱融合PC spectial sharpening PC波段融合CN spectial sharpening CN波段融合EFFORT polishing EFFORT 波谱打磨FLAASH FLAASH大气校正Quick atmospheric correction 快速大气校正Build 3D cube 建立3D立方体Preprocessing 预处理Calibration utilitiesAVHRRLandsat calibrationQUickbird radianceWorldview radianceFLAASHQuick atmospheric correctionFlat filedLog residualeIAR reflectanceEmpirical lineThermal atm correctionTIMS radianceCalculate emissivityGeneral purpose utilitiesReplace bad linesDark substractApply gain and offsetDestripeCross-tarck illumination correctionConvert complex dataConvert vax to IEEEData-specific utilities7.Map (配准与镶嵌)Registration 几何校正Rigorous orthorectification 严格模型正射校正Orthorectification 正射校正Mosaicking 图像镶嵌Georeference from input geometry 输入几何文件进行几何校正 Georeference SPOT SPOT几何校正Georeference SeaWiFS SeaWiFS几何校正Georeference ASTER ASTER几何校正Georefencece AVHRR AVHRR几何校正Georeference ENVISAT ENVISAT几何校正Georeference MODIS MODIS几何校正Georeference COSMO-SkyMed(DGM) DGM几何校正Georeference RADARSAT RADARSAT几何校正Build RPCs 构建RPCsCustomize map projections 自定义地图投影Convert map projection 地图投影转换Layer stacking 波段组合Map coordinate converter 地图坐标转换ASCII coordinate conversion ASCII坐标转换Merge old “map_proj.txt” file 合并原有map_proj.txt文件GPS-Link GPS连接8.Vector 矢量工具Open vector image 打开矢量文件Create new vector layer 新建矢量层Using existing vector layer 基于现有矢量层Using raster image file 基于栅格图像文件Using user defined parameters 基于用户自定义参数Create world boundaries 创建世界边界Available vectors list 当前矢量列表Intelligent digitizer 智能数字化工具Raster to vector 栅格转矢量Classification to vector 分类结果矢量化Rasterize point data 离散点栅格化Convert contours to DEM 等高线转为DEM9.Topographic 地形工具Open topographic file 打开地形文件Topographic modeling 地形模型Topographic features 地貌特征分析DEM extraction DEM提取DEM提取向导;提取向导;使用现有文件;选择立体控制点对;选择立体匹配点;构建核面图像;提取DEM;编辑DEM;立体3D测量;3D核面指针Create hill shade image 山体阴影图生成Replace bad values 坏值替换Rasterize point data 离散点栅格化Convert contours to DEM 等高线转为DEM3D SurfaceView 3D曲面浏览Outil bathym rie10.Radar 雷达工具Open/prepare radar file 打开/预处理雷达数据文件Calibration 定标Beta noughtSigma noughtAntenna pattern correction 天线阵列校正Slant-to-ground range 斜地校正Incidence angle image 入射角图像Adaptive filters 自适应滤波Texture filters 纹理滤波Synthetic color image 彩色图像合成Polarimetric tools 极化分析工具Synthesize AIRSAR Data AIRSAR数据合成Synthesize SIR-C data SIR-C数据合成Extract polarization sigbatures 极化信号提取Multilook compressed data 数据压缩多视Phase image 相位图像Pedestal height image 图像消隐脉冲高度AIRSAR scattering classification AIRSAR散射机理分析TOPSAR tools TOPSAR工具Open TOPSAR file 打开TOPSAR文件Convert TOPSAR data 打开TOPSAR数据DEM replace bad value DEM坏值替换11.window 窗口Window finder 查找窗口Start new display window 新建显示窗口Start new vector window 新建矢量窗口Start new plot window 新建绘图窗口Start 3D liDAR viewer LiDAR三维浏览器Available files list 当前文件列表Available bands list 当前波段列表Available vectors list 当前矢量列表Remote connection manager 远程连接管理Mouse button descriptions 鼠标按键说明Display information 显示信息Cursor location/value 光标定位/数值信息Point collection 点收集Maximize open displays 显示窗口最大化Link diaplays 关联显示Close all display windows 关闭所有显示窗口Close all plot windows 关闭所有绘图窗口。
MRI设备和MRA成像方法[发明专利]
![MRI设备和MRA成像方法[发明专利]](https://img.taocdn.com/s3/m/1ad03acdcfc789eb162dc8bd.png)
专利名称:MRI设备和MRA成像方法专利类型:发明专利
发明人:三好光晴,小杉进
申请号:CN03106344.6
申请日:20030225
公开号:CN1441258A
公开日:
20030910
专利内容由知识产权出版社提供
摘要:为减小由信号强度的衰减引起的图像质量降低或即使在成像区中同时存在快速血流和慢速血流时满意地再现血流,将成像区A划分为多个相邻的切片S1-S6;发射带有翻转角分布的RF脉冲以采集NMR信号,对于切片S1-S6的每个切片该脉冲的翻转角α在每个切片S1-S6的厚度方向上变化,并且对于每个切片S1-S6它的平均翻转角也不相同;以及基于NMR信号实施血流成像。
申请人:GE医疗系统环球技术有限公司
地址:美国威斯康星州
国籍:US
代理机构:中国专利代理(香港)有限公司
更多信息请下载全文后查看。
一种地球紫外中心快速提取方法
一种地球紫外中心快速提取方法张翰墨;卢山;杨文博;吕春光【摘要】针对地球紫外中心指向高精度提取问题,提出一种基于梯度统计的快速、低存储需求的紫外地平圆盘中心提取算法.首先,考虑到星载计算机与高内存消耗的滤波算法、实时导航需求的冲突,采用结合Sobel边缘算子与局部二值模式(LBP)算子的改进边缘快速提取方法,有效剔除背景噪声并准确提取地球紫外临边特征.然后对非完整临边边缘采用最小二乘拟合得到中心的精确位置.实验结果表明,该方法抗噪声,可实现亚像素级地球中心提取,并显著降低存储需求和计算时间开销.对于1046×746的图像,该算法需要的存储空间仅为1100 kByte,运算时间在20 ms内,满足自主导航的需求.【期刊名称】《宇航学报》【年(卷),期】2015(036)012【总页数】6页(P1453-1458)【关键词】紫外图像;梯度图;最小二乘拟合;局部二值模式特征【作者】张翰墨;卢山;杨文博;吕春光【作者单位】上海市空间智能控制技术重点实验室,上海201109;上海航天控制技术研究所,上海201109;上海市空间智能控制技术重点实验室,上海201109;上海航天控制技术研究所,上海201109;上海市空间智能控制技术重点实验室,上海201109;上海航天控制技术研究所,上海201109;南京大学国际地球系统科学研究所,南京210023【正文语种】中文【中图分类】TP3910 引言航天器的自主导航技术已经成为各国研究的热点,其抗干扰性和高可靠性是研究的目标。
地球紫外辐射特性具有可全天时观测的特征,在地球边缘处的“亮环”不受地貌和大气的影响,可观测到较稳定且明显的临边特征,这使得紫外敏感器具有提供高稳定性导航信息的优势。
通常,紫外敏感器通过对地球成像并对地心矢量估计来提供卫星的导航信息[1-3]。
紫外敏感器的研制和导航应用研究始于20世纪90年代,随着对星体紫外辐射特性研究的深入与积累,导航应用研究也从中低轨发展为高轨或者深空探测的巡航段任务[4]。
激光散斑成像中的手部皮肤图像配准

激光散斑成像中的手部皮肤图像配准
李洋
【期刊名称】《工业控制计算机》
【年(卷),期】2017(030)011
【摘要】激光散斑成像是一种可以对移动物体非侵入地实现二维全场成像的光学成像技术.基于时域激光散斑衬比分析技术,使用消费级摄像机设计了一套手功能灌注成像系统,并提出了基于增强相关系数最大化算法的序列图像配准方法,实现对连续多帧原始激光散斑图像的刚性配准,解决了由系统噪声和人体自身不自觉颤动引起的图像抖动问题.此外,为验证了系统的可行性,使用该设备实现了对5个正常人PORH实验中的手部皮肤灌注量变化的长时监测.
【总页数】3页(P68-69,102)
【作者】李洋
【作者单位】上海大学通信与信息工程学院,上海 200444
【正文语种】中文
【相关文献】
1.64例手部指动脉穿支皮瓣在手部皮肤缺损中的临床疗效 [J], 向宏伟
2.关联维数法在皮肤激光散斑测量中的应用 [J], 温午麒;傅汝廉;巴恩旭;刘迎;张小娟;马士宁
3.激光散斑血流成像系统及其在生物医学工程专业实验教学中的应用 [J], 李韪韬;赵月梅;江爱华;钱志余;张言
4.图像配准在高频超声皮肤三维成像中的应用研究 [J], WANG Wen-sai;XING
En-ming;WANG Tao;ZHOU Liu;WANG Xiao-chun;ZHOU Sheng;SONG Xue-dong;YANG Jun
5.脑侧支循环及激光散斑成像在脑侧支循环评监测中的应用研究进展 [J], 陈立人; 李洁; 张朝典; 曹非
因版权原因,仅展示原文概要,查看原文内容请购买。
基于模糊理论和CLAHE的雾天图像自适应清晰化算法
基于模糊理论和CLAHE的雾天图像自适应清晰化算法
王红;何小海;杨晓敏
【期刊名称】《微电子学与计算机》
【年(卷),期】2012(29)1
【摘要】为了解决雾天图像低对比度的问题,提出了一种基于模糊理论和CLAHE 的雾天图像的自适应清晰化算法.此算法结合图像的均值和标准差,将雾天图像从空域转换到模糊域,采用模糊增强算法实现全局雾天图像的自适应对比度增强后再采用有约束的局部直方图算法对雾天图像的亮度分量进行处理,在空域内进一步实现雾天图像的对比度增强.实验结果表明,该算法将模糊域和空间域的方法相结合,可以提高雾天图像的亮度和对比度,使雾天图像的视觉效果得到一定改善.
【总页数】3页(P32-34)
【关键词】雾天图像;模糊理论;CLAHE;对比度增强
【作者】王红;何小海;杨晓敏
【作者单位】四川大学电子信息学院
【正文语种】中文
【中图分类】TP301
【相关文献】
1.基于非线性扩散均值漂移的Retinex雾天图像清晰化算法 [J], 张洪坤;薛模根;周浦城
2.基于非线性扩散均值漂移的Retinex雾天图像清晰化算法 [J], 张洪坤;薛模根;周
浦城;
3.基于MSR的雾天图像清晰化算法研究 [J], 程娅荔;张也驰
4.基于大气散射模型和Retinex理论的雾霾图像清晰化算法 [J], 李武劲;彭怡书;欧先锋;吴健辉;郭龙源;晏鹏程;张一鸣;黄锋
5.基于大气散射模型和Retinex理论的雾霾图像清晰化算法 [J], 李武劲;彭怡书;欧先锋;吴健辉;郭龙源;晏鹏程;张一鸣;黄锋;;;;;;;;;
因版权原因,仅展示原文概要,查看原文内容请购买。
像素工厂PixelFactory(DOCX页)

像素工厂Pixel Factory--工业化解决方案像素工厂具备处理多种海量遥感数据(卫星影像及航摄影像)的能力,可提供多种可靠、高精度的制图产品。
像素工厂借助强大的处理能力和开放式架构可以自动处理来自不同探测器的大量的对地观测数据,产品包括多种制图数据(DSM ,真正射影像,大面积正射镶嵌影像)。
像素工厂的独特核心架构就在于能够处理航天和航空数据。
• 整体的设计架构就是给予客户最大的灵活性,甚至可以无缝嵌入客户的第三方软件或工具 • 强大的平行运算能力是您既可执行多任务又可以管理现有工作流,不受数据量大小和容量的限制• 具有集中的产品管理中心,图解式用户界面和远程接入模式,使得管理更简洁 • 模块化结构使得核心软件可以轻松升级来满足未来的需求像素工厂Pixel Factory 的强大特性可处理多种传感器数据光学卫星传感器SPOT 1-5 (HRV, HRG, HRS) Landsat 7ASTER IKONOS QUICKBIRD ERS KOMPA ST-2 FORMOSAT-2多种数据源ALOS-P r is m Avnir-2,IRS P5,IRS P6,THEOSSSOTCA RTOSA T-2GEOE Y E-1WORLDV IEW-1CBERS雷达卫星传感器TerrasarXRadarSat-1ERSRadarSat-2.EnviSat航空传感器模拟框幅式相机ADS40/80UltraCamDUCXDMCHRSC-AX, HRSC-AXWDSS Camera.完整的工具箱特点,超过200种最先进的算法:• 探测器校正• 原始影像增强• 多传感器的快速空三计算• 快速自动生成和过滤同名点• 自动提取DSM• 半自动提取DTM• 真正射和传统的几何校正• 自动从DTM提取等高线• 自动镶嵌(正射影像,高程影像和二次镶嵌),• 影像增强技术(dodging,contrast, equalisation, etc), • 影像和矢量的格式修改• 制图工具包•工作流程编辑器多重最终产品直接产品数字表面模型DSM数字地形模型DTM (基于DSM 过滤)真正射及传统正射影像 无缝真彩色及彩红外影像镶嵌衍生产品ADS-40 立体像对基于真正射影像的变化监测图等高线图DSM,正射影像,地籍图,变化监测可支持多种辅助参考数据高程参考数据Reference 3DTM SRTMDTM (客户提供)水平参考数据地形图经过地理坐标校准的影像 GPS 点 矢量数据支持多种格式的输入输出栅格数据:GeoTiff, BIL, ECW, ASCIIGrid, DIMA P, DTED, USGS etc.矢量数据:Shapefile, DXF高度自动化的图像处理过程快速进行多重传感器数据的区域网平差快速、自动生成同名点由多对立体像对提取高精度DSM由DSM高级过滤生成DTM自动真正射及传统正射影像纠正自动检测建筑物,提取建筑边界80%处理过程自动计算,仅有20%任务需由人工完成(如,编辑)优异的图像处理性能图像处理中心,由经过优化的软、硬件构成,专为处理海量影像数据而设计工作流管理方式,简化用户操作多任务并行计算,自动排定任务时序分布式架构,良好、灵活的互操作性远远优越于人工处理的生产率完备的售后服务与支持• 帮助安装并现场技术指导• 软件和产品的支持• 远程软件维护• 软件使用培训• 根据客户需要的软件二次开发成功案例北京视宝公司为澳大利亚(新南威尔士)处理73整景SPOT5影像(双模式获得的2.5 米黑白和10米彩色),进行真彩色无缝镶嵌。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
COSMO-S KY M ED I MAGE C ALIBRATION The radiometric calibration of SAR images consists in the evaluation of the radiometric values. These are independent of geometry and radar characteristics and dependent only on the terrain scattering features.
The effects that must be considered are:
•Range spreading loss effect
•Antenna pattern gain compensation
•Incidence angle effect
In the COSMO-SkyMed SCS_B, DGM_B, GEC_B and GTC_B images, all factors different pixel by pixel have been already corrected. So the square of the Digital Numbers (DN) of the images are related to the terrain backscattering coefficients σ0 through a constant number.
Note: all the data considered above use the WGS84 ellipsoid for the terrain correction, apart from GTC_B. The “terrain corrected” products (GTC_B) are processed using a Digital Elevation Model (DEM) which is used to evaluate the geometric calibration factors too.
S IGMA NAUGHT (σ0)E VALUATION
In the following, the steps that must be carried out to obtain backscattering coefficient image starting from DN are described.
The necessary parameters involved in the backscattering image generation are listed in a subsequent table. They could be extracted from metadata.
Note: the σ0 coefficients are defined in ground. So, extraction of σ0 coefficients from SCS images (level 1 A) means to have ground projected values in a slant geometry.
This must be taken into account if the backscattering image would be extracted. The ground projection is the natural projection in which backscattering coefficients are defined, so it’s better to use DGM_B images if you need calibrated images values.
For the image levels listed above and for any acquisition mode, the steps to obtain the calibrated values from the DN of image are the following:
To get σ 0 in dB:
),(log 10),(0100j i j i dB σσ=
Note: When starting from complex products (SCS_B)*, particular attentions must be taken in power calculation in order to avoid artefacts generation. Generally speaking, the power image evaluation must be done considering also an interpolation by two in order to enlarge the image spectral support; then the first step of Tab.1 can be applied. The σ 0 obtained as described in Tab. 1: steps for σ 0 evaluation
is the evaluation of the single pixel backscattering coefficient; in order to have a more significant result a running window average has to be done for σ 0 evaluation.
The form of the final backscattering image is obtained with a formula like the following one:
∑
+⋅++
⋅+=
c
r wid wid j
i c c r
r wid wid c j wid wid r i c r ,,00
)2
,2(),(σσ or, in logarithmic units:
),(log 10)
,(0100c r c r dB
σσ=
Note: SCS_U (Unbalanced level 1 A products) are not corrected for the main effects
listed above: therefore this procedure is NOT applicable to these data.
The following table lists all the metadata to be extracted and used for this procedure Description HDF5 Parameter name Symbol
used
Unit
Acquisition mode Acquisition Mode A Mode NA Reference slant range used
in the processing steps
Reference Slant Range R ref meters
Exponent of the Reference
Slant Range used to do the
Range Spreading Loss
correction
Reference Slant Range Exponent R exp Num
Reference incidence angle
used in the processing steps
Reference Incidence Angle αref Deg
Calibration constant
(depending on the sensor
mode)
Calibration Constant K Num
Rescaling factor applied in
the processing steps
Rescaling Factor F Num
Flag indicating if the range spreading loss compensation has been applied Range Spreading Loss Compensation
Geometry
Rsl flag NA
Flag indicating if the
Incidence Angle
Compensation has been
applied
Incidence Angle Compensation Geometry Inc flag NA
Flag indicating if the
calibration constant has been
applied
Calibration Constant Compensation Flag K flag boolean Tab. 2: Parameters used in the radiometric equalization of the COSMO images。