TC9012红外解码
红外解码管数码管显示 (用户码和数据码)
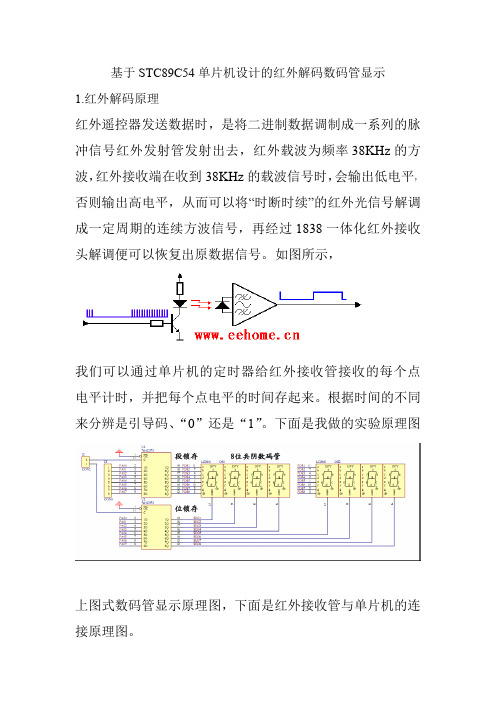
基于STC89C54单片机设计的红外解码数码管显示1.红外解码原理红外遥控器发送数据时,是将二进制数据调制成一系列的脉冲信号红外发射管发射出去,红外载波为频率38KHz的方波,红外接收端在收到38KHz的载波信号时,会输出低电平,否则输出高电平,从而可以将“时断时续”的红外光信号解调成一定周期的连续方波信号,再经过1838一体化红外接收头解调便可以恢复出原数据信号。
如图所示,我们可以通过单片机的定时器给红外接收管接收的每个点电平计时,并把每个点电平的时间存起来。
根据时间的不同来分辨是引导码、“0”还是“1”。
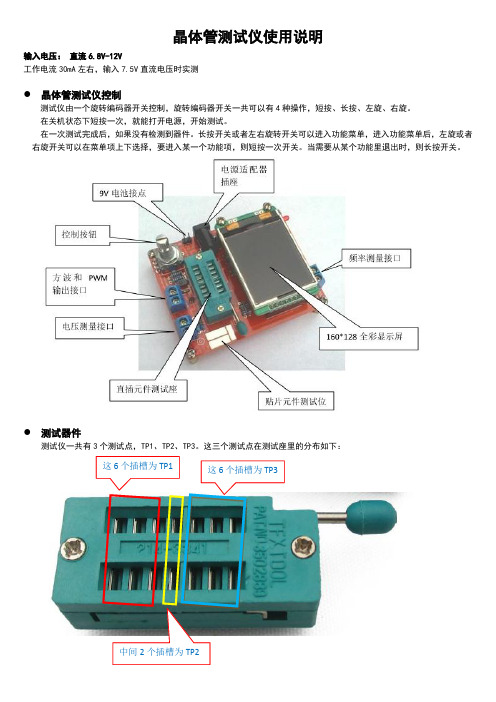
下面是我做的实验原理图上图式数码管显示原理图,下面是红外接收管与单片机的连接原理图。
注:上图的J27是和单片机的P3^2相连的。
程序中用到的定时器1、定时器0和外部中断0.下面是实验的C语言程序:/*-----------------------------------------------名称:遥控器红外解码数码管晶显示论坛:无编写:yang-baoan日期:2011.10修改:无内容:按配套遥控器按键,液晶显示4组码值,分别是用户码用户码数据码数据反码显示如下:1E1E00FF------------------------------------------------*/#include<reg52.h>//包含头文件,一般情况不需要改动,头文件包含特殊功能寄存器的定义sbit IR=P3^2;//红外接口标志#define DataPort P0//定义数据端口程序中遇到DataPort则用P0替换sbit LATCH1=P2^2;//定义锁存使能端口段锁存sbit LATCH2=P2^3;//位锁存unsigned char Tab[16]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};unsigned char TempWei[8]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0x7f};/*------------------------------------------------全局变量声明------------------------------------------------*/unsigned char irtime;//红外用全局变量bit irpro_ok,irok;unsigned char IRcord[4];unsigned char irdata[33];unsigned char TempData[8];/*------------------------------------------------函数声明------------------------------------------------*/void Ir_work(void);void Ircordpro(void);void Display(unsigned char FirstBit,unsigned char Num);/*------------------------------------------------定时器0中断处理------------------------------------------------*/void tim0_isr(void)interrupt1using1//using表示工作寄存器,后跟0—3个数分别表示工作寄存器组{irtime++;//用于计数2个下降沿之间的时间}/*------------------------------------------------外部中断0中断处理------------------------------------------------*/void EX0_ISR(void)interrupt0//外部中断0服务函数{static unsigned char i;//接收红外信号处理static bit startflag;//是否开始处理标志位if(startflag){if(irtime<63&&irtime>=33)//引导码TC9012的头码,9ms+4.5ms,此if语句只对下一条语句起作用i=0;irdata[i]=irtime;//存储每个电平的持续时间,用于以后判断是0还是1irtime=0;i++;if(i==33){irok=1;i=0;}}else{irtime=0;startflag=1;}}/*------------------------------------------------定时器0初始化------------------------------------------------*/void TIM0init(void)//定时器0初始化{TMOD|=0x02;//定时器0工作方式2,TH0是重装值,TL0是初值TH0=0x00;//重载值TL0=0x00;//初始化值ET0=1;//开中断TR0=1;}/*------------------------------------------------外部中断0初始化------------------------------------------------*/void EX0init(void){IT0=1;//指定外部中断0下降沿触发,INT0(P3.2)EX0=1;//使能外部中断EA=1;//开总中断}/*------------------------------------------------定时器1初始化------------------------------------------------*/void Init_Timer0(void){TMOD|=0x10;//使用模式1,16位定时器,使用"|"符号可以在使用多个定时器时不受影响TH1=(65536-2000)/256;//给定初值TL1=(65536-2000)%256;EA=1;//总中断打开ET1=1;//定时器中断打开TR1=1;//定时器开关打开}/*------------------------------------------------定时器1中断子程序------------------------------------------------*/void Timer0_isr(void)interrupt3{TH1=(65536-2000)/256;//重新赋值2ms TL1=(65536-2000)%256;Display(0,8);//调用数码管扫描}/*-----------------------------------------------------------数码管显示函数,动态扫描-----------------------------------------------------------*/void Display(unsigned char FirstBit,unsigned char Num) {static unsigned char i=0;DataPort=0;//清空数据,防止有交替重影LATCH1=1;//段锁存LATCH1=0;DataPort=TempWei[i+FirstBit];//取位码LATCH2=1;//位锁存LATCH2=0;DataPort=TempData[i];//取显示数据,段码LATCH1=1;//段锁存LATCH1=0;i++;if(i==Num)i=0;}/*------------------------------------------------键值处理------------------------------------------------*/void Ir_work(void){unsigned int t=200;TempData[0]=Tab[IRcord[0]/16];TempData[1]=Tab[IRcord[0]%16];TempData[2]=Tab[IRcord[1]/16];TempData[3]=Tab[IRcord[1]%16];TempData[4]=Tab[IRcord[2]/16];TempData[5]=Tab[IRcord[2]%16];TempData[6]=Tab[IRcord[3]/16];TempData[7]=Tab[IRcord[3]%16];irpro_ok=0;//处理完成标志}/*------------------------------------------------红外码值处理------------------------------------------------*/void Ircordpro(void)//红外码值处理函数{unsigned char i,j,k;unsigned char cord,value;k=1;for(i=0;i<4;i++)//处理4个字节{for(j=1;j<=8;j++)//处理1个字节8位{cord=irdata[k];if(cord>8)//大于某值为1,这个和晶振有绝对关系,这里使用12M计算,此值可以有一定误差value|=0x80;if(j<8){value>>=1;}k++;}IRcord[i]=value;value=0;}irpro_ok=1;//处理完毕标志位置1}/*------------------------------------------------延时函数,含有输入参数unsigned int t,无返回值unsigned int是定义无符号整形变量,其值的范围是0~65535------------------------------------------------*//*------------------------------------------------主函数------------------------------------------------*/void main(void){EX0init();//初始化外部中断TIM0init();//初始化定时器Init_Timer0();while(1)//主循环{if(irok)//如果接收好了进行红外处理{Ircordpro();irok=0;}if(irpro_ok)//如果处理好后进行工作处理,如按对应的按键后显示对应的数字等{Ir_work();}}}。
红外解码

细说红外编解码现有的红外遥控包括两种方式:PWM(脉冲宽度调制)和PPM(脉冲位置调制)。
两种形式编码的代表分别为NEC、CX6122和PHILIPS的RC-5、RC-6以及将来的RC-7。
PWM(脉冲宽度调制):以发射红外载波的占空比代表“0”和“1”。
引导码为载波发射9ms,关断4.5ms。
“0”为载波发射0.56ms,关断时间0.565ms;“1”为载波发射0.56ms,关断时间1.685ms;调制频率fCAR=1/Tc=fOSC/12=37.91K,fOSC是晶振频率(455K陶瓷晶体);占空比=T1/Tc=1/3。
使用38kHz载波频率头码间隔为9ms + 4.5ms使用16位客户代码使用8位数据代码和8位取反的数据代码数据格式包括引导码、用户码、数据码及数据码反码,编码一共是32位。
红外遥控信号从引导码开始,接下来是16位客户代码,然后是8位数据代码和取反的二进制8位代码,最后的是1位结束位。
此种编码方式可以使用MCU的捕获功能实现,通过比较两次捕获的时间,来判断发射码,参考程序:/s/blog_51f1a4130100azwv.html但并不是所有的编码器都是如此,比如TOSHIBA的TC9012,其引导码为载波发射4.5ms,关断时间4.5ms,其“0”为载波发射0.52ms,关断0.52ms,其“1”为载波发射0.52ms,关断1.04ms。
另一种编码方式是PPM(脉冲位置调制):以发射载波的位置表示“0”和“1”。
用从发射载波到关断载波为“0”,从关断载波到发射载波为“1”。
其发射载波和不发射载波的时间相同,都为0.889ms,也就是每位的时间是固定的。
调制频率fCAR=1/Tc=fOSC/12=36K,fOSC是晶振频率(432K陶瓷晶体);占空比=T1/Tc=1/3。
使用36 kHz载波频率双相编码(又名曼彻斯特编码)5位地址码,6位数据码1.778ms的恒定的位时间(即在36K载波下占64时钟周期)数据格式包括一个开始位(Start bit)、一个扩展位(Enlarge bit)、一个触发位(Toggle bit)、五个系统位和六个数据位。
晶体管测试仪使用说明
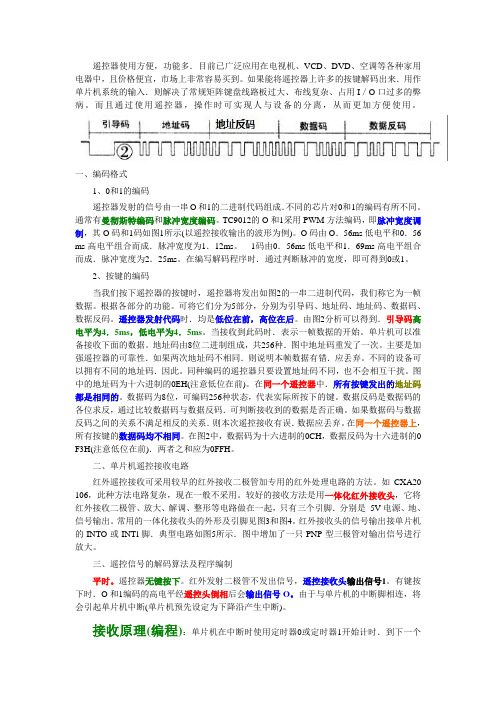
晶体管测试仪使用说明输入电压:直流6.8V-12V工作电流30mA左右,输入7.5V直流电压时实测●晶体管测试仪控制测试仪由一个旋转编码器开关控制,旋转编码器开关一共可以有4种操作,短按、长按、左旋、右旋。
在关机状态下短按一次,就能打开电源,开始测试。
在一次测试完成后,如果没有检测到器件。
长按开关或者左右旋转开关可以进入功能菜单,进入功能菜单后,左旋或者右旋开关可以在菜单项上下选择,要进入某一个功能项,则短按一次开关。
当需要从某个功能里退出时,则长按开关。
●测试器件测试仪一共有3个测试点,TP1、TP2、TP3。
这三个测试点在测试座里的分布如下:在测试座的右边是贴片元件的测试位置,上面分别有数字1,2,3,各代表TP1、TP2、TP3测试只有2个引脚的元件时,引脚不分测试顺序,2个引脚任意选择2个测试点,3个脚的器件引脚分别放到三个测试点中,不分顺序。
经过测试后,测试仪自动识别出元件的引脚名称、所在的测试点,并显示在屏幕上。
测试只有2个脚的元件时,如果使用的是TP1和TP3两个测试点,则测试完成后自动进入连续测试模式,这样可以连续的同步测量TP1和TP3上的元件,不用再按开关。
如果使用的是“TP1和TP2”或者“TP2和TP3”测试,则只测试一次。
要再一次测试则按一次开关。
测试电容器前,先给电容器放电,再插入测试座测量,否则有可能损坏测试仪的单片机。
●校准测试仪校准是用于消除自身元器件的误差,使得最后的测试结果更加精确。
校准分为快速校准和全功能校准。
快速校准的操作方法:用导线将三个测试点TP1、TP2、TP3短接,然后按下测试按钮,同时注意观察屏幕。
屏幕颜色会变成黑底白字,在出现提示信息”Selftest mode..? ”后,按一下测试按钮,就进入到快速校准过程;如果在出现提示信息“Selftest mode..?”后,2秒钟内没有按键,则进行一次正常的测试过程,最后显示出短接TP1、TP2、TP3三个测试点导线的电阻值。
TC9012遥控收发系统的设计

TC9012遥控收发系统的设计【摘要】随着微控制技术的不断提高,在工业控制中单片机得到了广泛的应用,通过单片机配合红外的收发模块,可以实现短距离的无线通讯。
设计一款基于TC9012和VS1838B的红外收发收发系统。
设计中通过TC9012作为红外的数据发送端,利用单片机和VS1838B组成红外接收电路,并利LCD1602对接收的数据进行显示。
【关键字】单片机HS0038B 无线通讯一、前言经过几十年的不断发展,国内在红外技术方面的研发取得了重大的突破,国内各大名校围绕红外技术建立了很多课题组,对红外技术进行研究,红外通讯类产品已经成为生活中不可缺少的部分。
利用单片机和红外收发芯片组成无线通讯系统,可以解决有线通讯,安装复杂受外界环境影响大的缺点。
二、系统方案设计红外无线数传系统由红外发送机和接收机两个部分组成,其中发送机利用红外芯片对输入的按键信息进行采集,通过无线的方式将数据发送给接收机。
接收机通过读取接收模块输出是数据,实现发送机发送数据的采集,同时通过显示模块将接收信息显示在LCD显示屏上。
三、硬件设计系统的硬件由两部分分别是发送机和接收机。
接收机的硬件电路由单片机最小系统、红外接收电路、红外发射电路、LCD显示电路、电源电路等组成(图1);接收由于按键电路、发送芯片、电源电路和LED显示电路组成。
3.1红外接收机硬件电路设计3.1.1单片机最小系统设计单片机、晶振电路、复位电路和下载电路组成了单片机的最小工作系统,最小系统是系统最基础的电路。
晶振电路由一个无源晶振和两个20pf的电容组成,通过晶振的振荡为最小系统提供需要的工作时序;复位电路的作用是让单片机执行的程序返回到初始状态。
3.1.2电源电路设计电源采用ACE 2200mAh 3S 电池,它的输出电压为11.1V,经过K7805降?汉笞?成5V为单片机和接收板上的各功能模块供电。
3.1.3红外接收电路设计VS1838B由于3个引脚构成,它们分别是电源引脚、地引脚和数据输出引脚,其中电源引脚和地引脚是器件的供电端,电路设计时需要和VCC\GND分别相连,数据输出引脚接待单片机的的P32口,单片机通过读取P32的电平变化转态,来判断器件输出的电平是高电平或是低电平。
遥控器红外解码数码管显示

{
irtime++; //用于计数2个下降沿之间的时间
}
/*------------------------------------------------
外部中断0中断处理
------------------------------------------------*/
#include<reg52.h> //包含头文件,一般情况不需要改动,头文件包含特殊功能寄存器的定义
sbit IR=P3^2; //红外接口标志
#define DataPort P0 //定义数据端口程序中遇到DataPort则用P0替换
sbit LATCH1=P2^2;//定义锁存使能端口段锁存
{
for(j=1;j<=8;j++) //处理1个字节8位
{
cord=irdata[k];
if(cord>7)//大于某值为1,这个和晶振有绝对关系,这里使用12M计算,此值可以有一定误差
value|=0x80;
if(j<8)
{
value>>=1;
}
k++;
}
IRcord[i]=value;
value=0;
}
irpro_ok=1;//处理完毕标志位置1
}
/*------------------------------------------------
主函数
------------------------------------------------*/
void main(void)
红外遥控解码程序

红外遥控解码程序红外接收头的型号有很多HS0038 VS838等功能⼤致相同,只是引脚封装不同。
红外接收有⼏种统⼀的编码⽅式,采样哪种编码⽅式取决于遥控器使⽤的芯⽚,接收头收到的都是⼀样的。
电视遥控器使⽤的是专⽤集成发射芯⽚来实现遥控码的发射,如东芝TC9012,飞利浦AA3010T等,通常彩电遥控信号的发射,就是将某个按键所对应的控制指令和系统码(由0和1组成的序列),调制在38KHz的载波上,然后经放⼤、驱动红外发射管将信号发射出去。
不同公司的遥控芯⽚,采样的遥控码格式也不⼀样,较普遍的有两种,⼀种NEC标准,⼀种是PHILIPS标准。
NEC标准:遥控载波的频率为38KHz(占空⽐1:3)当某个键按下时,系统⾸先发射⼀个完整的全码,如果按键超过108ms仍未松开,接下来发射的代码(连发代码)将由起始码(9ms)和结束码(2.5ms)组成。
⼀个完整的全码 = 引导码 +⽤户码 +⽤户码 + 数据码 + 数据码 + 数据反码。
其中,引导码⾼电平9ms,低电平4.5ms;系统码8位,数据码8位,共32位;其中前16位为⽤户识别码,能区别不同的红外遥控设备,以防⽌不同的机种遥控码互相⼲扰。
后16位为8位的操作码和8位的操作反码,⽤于核对数据是否接收准确。
收端根据数据码做出应该执⾏上⾯动作的判断。
连发代码是在持续按键时发送的码。
它告知接收端。
某键是在被连续的按着。
NEC标准下的发射码表⽰发射数据0时⽤”0.56ms⾼电平 + 0.565ms低电平 = 1.125ms”表⽰;数据1⽤”⾼电平0.56ms + 1.69ms = 2.25ms”表⽰。
遥控器发射信号:需要注意的是:当⼀体化接收头收到38kHz红外信号时,输出端输出低电平,否则为⾼电平。
所以⼀体化接收头输出的波形和发射波形是反向的PHILIPS标准:载波频率38KHz:没有筒,点按键时,控制码1和0之间切换,若持续按键,则控制码不变。
⼀个全码 = 起始码’11’ +控制码 + ⽤户码 + ⽤户码数据0⽤“低电平1.778ms + ⾼电平1.778ms”表⽰;数据1⽤“⾼电平1.778ms + 低电平1.778ms”表⽰。
常见红外遥控器编码与格式

电源和红外发射电路组成。
信号调制为脉冲串信号,通过红外发射管发射。
常用的有通过脉冲宽度来实现信号调制的脉红外线遥控器已被广泛使用在各种类型的家电产品上,它的出现给使用电器提供了很多的便利。
红外遥控系统一般由红外发射装置和红外接收设备两大部分组成。
红外发射装置又可由键盘电路、红外编码芯片、红外接收设备可由红外接收电路、红外解码芯片、电源和应用电路组成。
通常为了使信号能更好的被传输发送端将基带二进制宽调制(PWM )和通过脉冲串之间的时间间隔来实现信号调制的脉时调制(PPM )两种方法。
在同一个遥控电路中通常要使用实现不同的遥控功能或区分不同的机器类型,这样就要求信号按一定的编码传送,编码则会由编码芯片或电路完成。
对应于编码芯片通常会有相配对的解码芯片或包含解码模块的应用芯片。
在实际的产品设计或业余电子制作中,编码芯片并一定能完成我们要求的功能,这时我们就需要了解所使用的编码芯片到底是如何编码的。
只有知道编码方式,我们才可以使用单片机或数字电路去定制解码方案。
下面介绍的是笔者所收集整理的一些常用遥控编码芯片的编码方式和常用一体化接收芯片的引脚示意图。
在最后还用实例介绍M50560-001P 芯片的解码思路和应用实例程序的编写。
常用红外一体化接收头引脚示意uPD6121,uPD6122,PT2222,SC6121,HS6222,HS6221载波波形 使用455KHz 晶体,经内部分频电路,信号被调制在37.91KHz ,占空比为3分之1。
数据格式. 数据格式包括了引导码、用户码、数据码和数据码反码,编码总占32位。
数据反码是数据码反相后的编码,编码时可用于对数据的纠错。
注意:第二段的用户码也可以在遥控应用电路中被设置成第一段用户码的反码。
使用455KHz 晶振时各代码所占的时间位定义 用户码或数据码中的每一个位可以是位‘1’,也可以是位‘0’。
区分‘0’和‘1’是利用脉冲的时间间隔来区分,这种编码方式称为脉冲位置调制方式,英文简写PPM 。
红外遥控器原理
遥控器使用方便,功能多.目前已广泛应用在电视机、VCD、DVD、空调等各种家用电器中,且价格便宜,市场上非常容易买到。
如果能将遥控器上许多的按键解码出来.用作单片机系统的输入.则解决了常规矩阵键盘线路板过大、布线复杂、占用I/O口过多的弊病。
而且通过使用遥控器,操作时可实现人与设备的分离,从而更加方便使用。
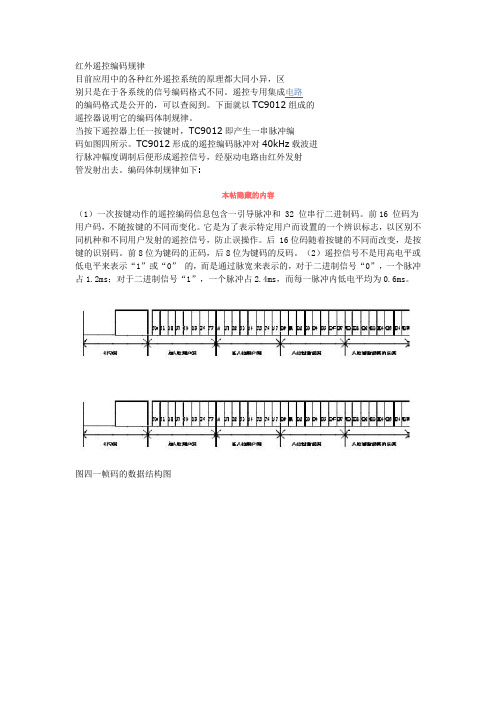
一、编码格式1、0和1的编码遥控器发射的信号由一串O和1的二进制代码组成.不同的芯片对0和1的编码有所不同。
通常有曼彻斯特编码和脉冲宽度编码。
TC9012的O和1采用PWM方法编码,即脉冲宽度调制,其O码和1码如图1所示(以遥控接收输出的波形为例)。
O码由O.56ms低电平和0.56 ms高电平组合而成.脉冲宽度为1.12ms。
1码由0.56ms低电平和1.69ms高电平组合而成.脉冲宽度为2.25ms。
在编写解码程序时.通过判断脉冲的宽度,即可得到0或1。
2、按键的编码当我们按下遥控器的按键时,遥控器将发出如图2的一串二进制代码,我们称它为一帧数据。
根据各部分的功能。
可将它们分为5部分,分别为引导码、地址码、地址码、数据码、数据反码。
遥控器发射代码时.均是低位在前,高位在后。
由图2分析可以得到.引导码高电平为4.5ms,低电平为4.5ms。
当接收到此码时.表示一帧数据的开始。
单片机可以准备接收下面的数据。
地址码由8位二进制组成,共256种.图中地址码重发了一次。
主要是加强遥控器的可靠性.如果两次地址码不相同.则说明本帧数据有错.应丢弃。
不同的设备可以拥有不同的地址码.因此。
同种编码的遥控器只要设置地址码不同,也不会相互干扰。
图中的地址码为十六进制的0EH(注意低位在前)。
在同一个遥控器中.所有按键发出的地址码都是相同的。
数据码为8位,可编码256种状态,代表实际所按下的键。
数据反码是数据码的各位求反,通过比较数据码与数据反码.可判断接收到的数据是否正确。
如果数据码与数据反码之间的关系不满足相反的关系.则本次遥控接收有误.数据应丢弃。
红外遥控编码规律
红外遥控编码规律
目前应用中的各种红外遥控系统的原理都大同小异,区
别只是在于各系统的信号编码格式不同。
遥控专用集成电路
的编码格式是公开的,可以查阅到。
下面就以TC9012组成的
遥控器说明它的编码体制规律。
当按下遥控器上任一按键时,TC9012即产生一串脉冲编
码如图四所示。
TC9012形成的遥控编码脉冲对40kHz载波进
行脉冲幅度调制后便形成遥控信号,经驱动电路由红外发射
管发射出去。
编码体制规律如下:
本帖隐藏的内容
(1)一次按键动作的遥控编码信息包含一引导脉冲和 32 位串行二进制码。
前16 位码为用户码,不随按键的不同而变化。
它是为了表示特定用户而设置的一个辨识标志,以区别不同机种和不同用户发射的遥控信号,防止误操作。
后 16位码随着按键的不同而改变,是按键的识别码。
前8位为键码的正码,后8位为键码的反码。
(2)遥控信号不是用高电平或低电平来表示“1”或“0” 的,而是通过脉宽来表示的,对于二进制信号“0”,一个脉冲占1.2ms;对于二进制信号“1”,一个脉冲占2.4ms,而每一脉冲内低电平均为0.6ms。
图四一帧码的数据结构图。
红外解码讲解
红外解码一直是单片机中应用较多的,需要设备加装专用解码芯片,这就大大减轻了单片机的负担。
需要单片机样例使用延时做红外解码,比较容易理解,但是由于在主程序中使用,当存在许多中断时就可能造成误码,很多时候误码率较高,成品中则一般使用中断方式。
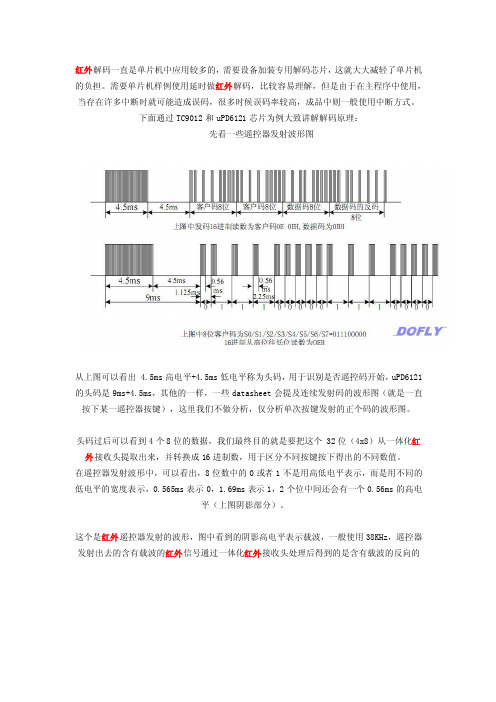
下面通过TC9012和uPD6121芯片为例大致讲解解码原理:先看一些遥控器发射波形图从上图可以看出 4.5ms高电平+4.5ms低电平称为头码,用于识别是否遥控码开始,uPD6121的头码是9ms+4.5ms,其他的一样,一些datasheet会提及连续发射码的波形图(就是一直按下某一遥控器按键),这里我们不做分析,仅分析单次按键发射的正个码的波形图。
头码过后可以看到4个8位的数据,我们最终目的就是要把这个 32位(4x8)从一体化红外接收头提取出来,并转换成16进制数,用于区分不同按键按下得出的不同数值。
在遥控器发射波形中,可以看出,8位数中的0或者1不是用高低电平表示,而是用不同的低电平的宽度表示,0.565ms表示0,1.69ms表示1,2个位中间还会有一个0.56ms的高电平(上图阴影部分)。
这个是红外遥控器发射的波形,图中看到的阴影高电平表示载波,一般使用38KHz,遥控器发射出去的含有载波的红外信号通过一体化红外接收头处理后得到的是含有载波的反向的波形,也就是没有上图中的阴影部分。
大致如下图一体化红外接收头内部集成了选频放大(38KHz左右频率增益最大),检波(把38KHz的载波滤除),放大整形(变成容易检测的矩形波)。
看到如上图波形,表示单片机引脚可以接收到的波形,我们只要通过单片机读取波形并分析波形的宽度,然后分辨出是头码,还是0或者1,最后整理出这组码的16进制组合。
正确的解码结果是按同一个按键得出的16进制数值是不变化的。
通过这个原理,我们可以分辨出每个按键的键值。
mini80/mini80e样例程序中使用的红外解码程序,应用了外部中断,平时从书上或者网络上看到的解码一般是单纯解码,整个程序不做其他工作,这种方式可以使用普通io口,用延时等待的方法判断接收到的是高电平还是低电平,从而判断码值。
红外遥控原理(红外开发)
红外遥控器的原理一. 关于遥控器遥控器其核心元器件就是编码芯片,将需要实现的操作指令例如选台、快进等事先编码,设备接收后解码再控制有关部件执行相应的动作。
显然,接收电路及CPU也是与遥控器的编码一起配套设计的。
编码是通过载波输出的,即所有的脉冲信号均调制在载波上,载波频率通常为38K。
载波是电信号去驱动红外发光二极管,将电信号变成光信号发射出去,这就是红外光,波长范围在840nm到960nm之间。
在接收端,需要反过来通过光电二极管将红外线光信号转成电信号,经放大、整形、解调等步骤,最后还原成原来的脉冲编码信号,完成遥控指令的传递,这是一个十分复杂的过程。
红外线发射管通常的发射角度为30-45度之间,角度大距离就短,反之亦然。
遥控器在光轴上的遥控距离可以大于8.5米,与光轴成30度(水平方向)或15度(垂直方向)上大于6.5米,在一些具体的应用中会充分考虑应用目标,在距离角度之间需要找到某种平衡。
对于遥控器涉及到如下几个主要问题:1. 遥控器发出的编码信号驱动红外线发射管,必须发出波长范围在940nm左右的的红外光线,因为红外线接收器的接收二极管主要对这部分红外光信号敏感,如果波长范围不在此列,显然无法达到控制之目的。
不过,几乎所有的红外家电遥控器都遵循这一标准。
正因为有这一物理基础,多合一遥控器才有可能做成。
2. 遥控器发出一串编码信号只需要持续数十ms的时间,大多数是十多ms或一百多ms重复一次,一串编码也就包括十位左右到数十位二进制编码,换言之,每一位二进制编码的持续时间或者说位长不过2ms左右,频率只有500kz这个量级,要发射更远的距离必需通过载波,将这些信号调制到数十khz,用得最多的是38khz,大多数普通遥控器的载波频率是所用的陶瓷振荡器的振荡频率的1/12,最常用的陶瓷振荡器是455khz规格,故最常用的载波也就是455khz/12=37.9khz,简称38k载波。
此外还有480khz(40k)、440khz(37k)、432khz (36k)等规格,也有200k左右的载波,用于高速编码。
红外遥控调制编码方式介绍

Inside a TV Remote Control by Marshall Brain 2004/09/26Weng If you are like most Americans, you probably pick up a TV remote control at least once or twice a day. Let's look inside and see how they work. Here is the remote we will be dissecting today:The remote control's job is to wait for you to press a key, and then to translate that key-press into infrared (pronounced "infra-red") light signals that are received by the TV. When you take off the back cover of the control you can see that there is really just 1 part visible: a printed circuit board that contains the electronics and the battery contacts.The components that you see here are typical for most remotes. You can see an integrated circuit (also known as a chip) labeled "TA11835". The chip is packaged in what is known as an 18 pin Dual Inline Package, or a DIP. To the right of the chip you can see a diode, a transistor (black, with three leads), a resonator (yellow), two resistors (green) and a capacitor (dark blue). Next to the battery contacts there is a resistor (green) and a capacitor (tan disk). In this circuit, the chip can detect when a key is pressed. It then translates the key into a sequence something like morse code, with a different sequence for each different key. The chip sends that signal out to the transistor to amplify the signal and make it stronger.The Circuit BoardWhen you unscrew the circuit board and take it out, you can see that the circuit board is a thin piece of fiber glass that has thin copper "wires" etched onto its surface. Electronic parts are assembled on printed circuit boards because they are easy to mass produce and assemble. In the same way that it is relatively inexpensive to print ink onto a sheet of paper, it is inexensive to "print" copper wires onto a sheet of fiber glass. It is also easy to have a machine drop the parts (the chips, transistors, etc.) onto the sheet of fiberglass and then solder them on to connect them to the copper wires.When you look at the board, you can see a set of contact points for the buttons. The buttons themselves are made of a thin rubbery sheet. For each button there is a black conductive disk. When the disk touches the contacts on the printed circuit board, it connects them and the chip can sense that connection.At the end of the circuit board there is an infrared LED, or Light Emitting Diode. You can think of an LED as a small light bulb. Many LEDs produce visible light, but a remote's LED produces infrared light that is invisible to the human eye. It is not invisible to all eyes, however. For example, if you have a camcorder it can see the infrared light. Point your remote at the camera and push a button. You will be able to see the infrared light flashing in the viewfinder. The receptor in the TV is able to see infrared light as well.So the basic operation of the remote goes like this: You press a button. When you do that youcomplete a specific connection. The chip senses that connection and knows what button you pressed. It produces a morse-code-line signal specific to that button. The transistors amplify the signal and send them to the LED, which translates the signal into infrared light. The sensor in the TV can see the infrared light and "seeing" the signal reacts appropriately.LinksGeneral:∙How Television WorksTechnical:∙Decoding IR Remote Controls∙ A Serial Infrared Remote Control∙IR remote control computer interfacing∙Remote Infrared Control∙Innotech Systems, Inc. - manufacturer紅外遙控調製編碼方式介紹數位小屋在大多數的遙控傳輸系統中,只有少量的資料被傳送到設備。
51单片机解码红外遥控器原理
51单片机解码红外遥控器原理电视遥控器使用的是专用集成发射芯片来实现遥控码的发射,如东芝TC9012,飞利浦SAA3010T等,通常彩电遥控信号的发射,就是将某个按键所对应的控制指令和系统码(由0和1组成的序列),调制在38KHz的载波上,然后经放大、驱动红外发射管将信号发射出去。
不同公司的遥控芯片,采用的遥控码格式也不一样。
较普遍的有两种,一种是NEC标准,一种是PHILIPS 标准。
NEC标准:遥控载波的频率为38KHz(占空比为1:3);当某个按键按下时,系统首先发射一个完整的全码,如果键按下超过108ms仍未松开,接下来发射的代码(连发代码)将仅由起始码(9ms)和结束码(2.5ms)组成。
一个完整的全码=引导码+用户码+用户码+数据码+数据反码。
其中,引导码高电平4.5ms,低电平4.5ms;系统码8位,数据码8位,共32位;其中前16 位为用户识别码,能区别不同的红外遥控设备,防止不同机种遥控码互相干扰。
后16 位为8 位的操作码和8位的操作反码,用于核对数据是否接收准确。
收端根据数据码做出应该执行什么动作的判断。
连发代码是在持续按键时发送的码。
它告知接收端,某键是在被连续地按着。
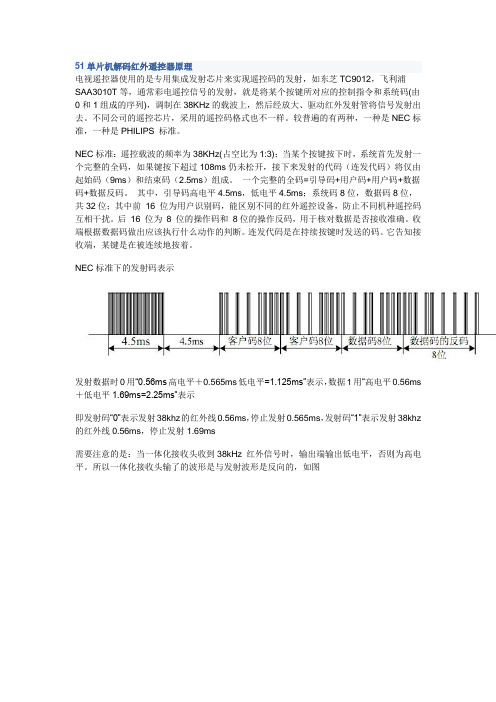
NEC标准下的发射码表示发射数据时0用“0.56ms高电平+0.565ms低电平=1.125ms”表示,数据1用“高电平0.56ms +低电平1.69ms=2.25ms”表示即发射码“0”表示发射38khz的红外线0.56ms,停止发射0.565ms,发射码“1”表示发射38khz 的红外线0.56ms,停止发射1.69ms需要注意的是:当一体化接收头收到38kHz 红外信号时,输出端输出低电平,否则为高电平。
所以一体化接收头输了的波形是与发射波形是反向的,如图PHILIPS标准:载波频率为38KHz;没有简码,点按键时,控制码在1和0之间切换,若持续按键,则控制码不变。
一个全码=起始码‘11’+控制码+用户码+用户码,如图所示。
(完整版)基于51单片机的红外遥控器解码设计毕业论文
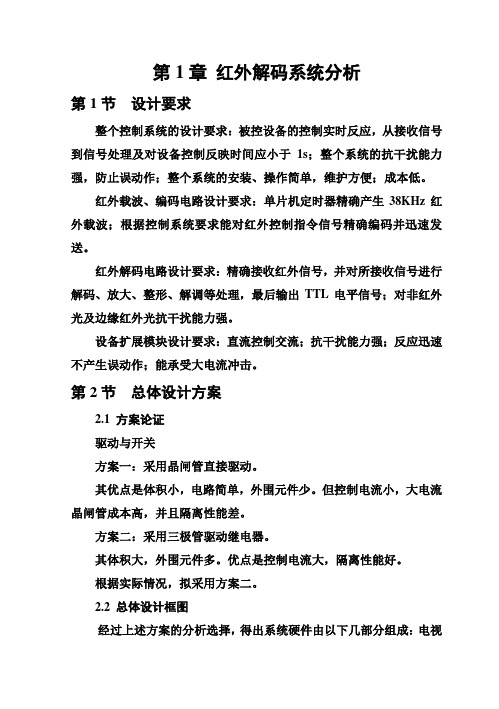
第1章红外解码系统分析第1节设计要求整个控制系统的设计要求:被控设备的控制实时反应,从接收信号到信号处理及对设备控制反映时间应小于1s;整个系统的抗干扰能力强,防止误动作;整个系统的安装、操作简单,维护方便;成本低。
红外载波、编码电路设计要求:单片机定时器精确产生38KHz红外载波;根据控制系统要求能对红外控制指令信号精确编码并迅速发送。
红外解码电路设计要求:精确接收红外信号,并对所接收信号进行解码、放大、整形、解调等处理,最后输出TTL电平信号;对非红外光及边缘红外光抗干扰能力强。
设备扩展模块设计要求:直流控制交流;抗干扰能力强;反应迅速不产生误动作;能承受大电流冲击。
第2节总体设计方案2.1 方案论证驱动与开关方案一:采用晶闸管直接驱动。
其优点是体积小,电路简单,外围元件少。
但控制电流小,大电流晶闸管成本高,并且隔离性能差。
方案二:采用三极管驱动继电器。
其体积大,外围元件多。
优点是控制电流大,隔离性能好。
根据实际情况,拟采用方案二。
2.2 总体设计框图经过上述方案的分析选择,得出系统硬件由以下几部分组成:电视红外遥控器,51单片机最小系统,接收放大于一体集成红外接收头,1602液晶显示驱动电路。
整体设计思路为:根据扫描到不同的按键值转至相对应的ROM表读取数据。
确认设备及菜单选择键后AT89S2将从ROM读取出来的值,按照数据处理要求从P2.5输出控制脉冲与T0产生的38KHz的载波(周期是26.3μs)进行调制,经NPN三极管对信号放大驱动红外发光管将控制信号发送出去。
红外数据接收则是采用HS0038一体化红外接收头,内部集成红外接收、数据采集、解码的功能,只要在接收端INT0检测头信号低电平的到来,就可完成对整个串行的信号进行分析得出当前控制指令的功能。
然后根据所得的指令去操作相应的用电器件工作,如图1-1所示。
图1-1 电路设计整体框图第2章红外解码硬件电路设计第1节单片机及其硬件电路设计1.1 单片机的介绍AT89S52是一种低功耗、高性能CMOS8位微控制器,具有8K 在系统可编程Flash 存储器。
NEC和RC5码

1、编码格式现有的红外遥控包括两种方式:PWM(脉冲宽度调制)和PPM(脉冲位置调制)。
两种形式编码的代表分别为NEC 和PHILIPS 的RC-5、RC-6 以及将来的RC-7。
PWM(脉冲宽度调制):以发射红外载波的占空比代表“0”和“1”。
为了节省能量,一般情况下,发射红外载波的时间固定,通过改变不发射载波的时间来改变占空比。
例如常用的电视遥控器,使用NEC upd6121,其“0”为载波发射0.56ms,不发射0.56ms;其“1”为载波发射0.56ms,不发射1.68ms;此外,为了解码的方便,还有引导码,upd6121 的引导码为载波发射9ms,不发射4.5ms。
upd6121 总共的编码长度为108ms。
但并不是所有的编码器都是如此,比如TOSHIBA 的TC9012,其引导码为载波发射4.5ms,不发射4.5ms,其“0”为载波发射0.52ms,不发射0.52ms,其“1”为载波发射0.52ms,不发射1.04ms。
PPM(脉冲位置调制):以发射载波的位置表示“0”和“1”。
从发射载波到不发射载波为“0”,从不发射载波到发射载波为“1”。
其发射载波和不发射载波的时间相同,都为0.68ms,也就是每位的时间是固定的。
通过以上对编码的分析,可以得出以某种固定格式的“0”和“1”去学习红外,是很有可能不成功的。
即市面上所宣传的可以学习64 位、128 位必然是不可靠的。
另外,由于空调的状态远多于电视、音像,并且没有一个标准,所以各厂家都按自己的格式去做一个,造成差异更大。
比如:美的的遥控器采用PWM 编码,码长120ms 左右;新科的遥控器也采用PWM 编码,码长500ms 左右。
如此大的差异,如果按“位”的概念来讲,应该是多少位呢?64?128?显然都不可能包含如此长短不一的编码。
2、学习模式现在用来学习红外的CPU,无外乎以下几种:MCS-51系列、microchip pic16 系列、winbond w741 系列、holtek ht48 系列,以上的CPU 由于价格便宜、使用量大,被广泛使用在遥控器上。
基于红外遥控步进电机的设计

基于红外遥控步进电机的设计班级:B140415摘要:随着微电子和计算机技术的发展,步进电机的需求量与日俱增,它广泛用于打印机、电动玩具等消费类产品以及数控机床、工业机器人、医疗器械等机电产品中,其在各个国民经济领域都有应用。
研究步进电机的控制系统,对提高控制精度和响应速度、节约能源等都具有重要意义。
步进电机是一种能将电脉冲信号转换成角位移或线位移的机电元件,步进电机控制系统主要由步进控制器,功率放大器及步进电机等组成。
采用单片机控制,用软件代替上述步进控制器,使得线路简单,成本低,可靠性大大增加。
软件编程可灵活产生不同类型步进电机励磁序列来控制各种步进电机的运行方式。
介绍了一种基于AT89C51单片机的红外遥控步进电机的设计,系统分为红外遥控编解码、LCD显示和驱动步进电机三个模块,设计的系统能通过遥控器来控制步进电机,并且步进电机的状态能通过LCD液晶模块实时显示出来,使人们直观的看出步进电机的运行状态。
本报告对该系统的工作原理、硬件电路和软件进行了详细介绍。
关键词:红外遥控、LCD显示、步进电机、单片机一、引言本系统是基于单片机控制的综合系统,单片机通过对红外信号的解码来实现步进电机的变速及LCD实时显示步进电机的转速。
它综合了电子技术和单片机软硬件技术,本设计采用AT89c51单片机为核心包含红外接收电路、LCD显示电路和步进电机驱动电路。
通过红外遥控器发射不同的码值来控制步进电机的正转反转、加速减速以及启动停止并通过LCD显示出步进电机的状态。
二、系统功能分析根据系统要求设计各个模块。
本设计中控制芯片采用AT89c51单片机,各个功能通过不同模块来得以实现,主要有:红外接收模块、步进电机驱动和LCD显示模块。
系统基本架构原理如图1所示图一基本架构原理图各个模块具体实现方式如下:1. 红外发射模块:本设计采用的是通过遥控器发射不同的码值,红外接收电路将接收到得信号送给单片机的外部中断0,单片机接收到信号后通过解码程序对接收到得信号进行处理,使得这些信号成为相应的码值。
红外编解码彻底解析

反相后的波形:
根据编码规则:
得到一组数字:110,11010,001101
根据编码定义:
第一位是起始位 S 通常是逻辑 1 第二位是场位 F 通常为逻辑 1,在 RC5 扩展模式下它将最后 6 位命令代码扩充到 7 位代码(高位 MSB),这样可以从 64 个键值扩充到 128 个键值。 第三位是控制位 C 它在每按下了一个键后翻转,这样就可以区分一个键到底是一直按着没松手还 是松手后重复按。 如图所示是同一按键重复按两次所得波形,只有第三位是间隔组成;结束位是 0.56ms 的 38K 载波。
下面实例是已知 NEC 类型遥控器所截获的波形: 遥控器的识别码是 Address=0xDD20;其中一个键值是 Command=0x0E;
注意波形先是发低位地址再发高位地址。所以 0000,0100,1011,1011 反转过来就是 1101,1101,00 10,000 十六进制的 DD20; 键值波形如下:
2、学习模式
现在用来学习红外的 CPU,无外乎以下几种: MCS-51 系列、microchip pic16 系列、winbond w741 系列、holtek ht48 系列 以上的 CPU 由于价格便宜、使用量大,被广泛使用在遥控器上。 以上的 CPU 的基本点是:执行速度在 1us 左右,数据存储器一般为 256 个字节。如果按固定 格式学习,一般可以学到 128 位(其他程序会占用一些数据存储器);如果不按固定的格式,需 要找出编码的最小公约数作为基本单位, 则可以学习到的位数大大降低, 达不到实用的效果。 但是, 即使如此,找到的最小公约数不可能满足所有的红外设备,除非最小单位为 26us(1000000/38k)。 如果达到这个速度,以上 CPU 的速度远远不够,并且由于存储量的加大,数据存储器也远远不够 用。 对于电视、音响等,一般使用专用的遥控芯片,比 nec,philips,toshiba,sanyo,mitsubish,pana sonic 的芯片,其编码格式固定,一个键只有一个编码,学习比较容易。 而空调不一样,各家空调厂商都是按自己的要求用 cpu 做遥控芯片,编码形式就有很多种。 比如可能没有引导码(电视音响类都有)、校验方式取累加和(电视音响类一般取反码)等。因为 空调的状态多,必须一次发送完毕,有制冷、温度、风速、自动、定时、加湿、制热等,所以编码 很长,并且同一个按键,在不同状态下发送的编码不一样,造成学习上的困难。
红外编码格式
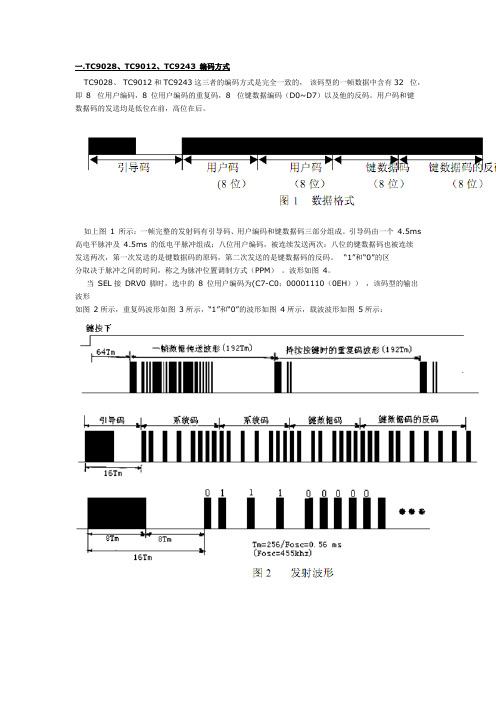
一.TC9028、TC9012、TC9243 编码方式TC9028、TC9012和TC9243这三者的编码方式是完全一致的,该码型的一帧数据中含有32 位,即8 位用户编码,8 位用户编码的重复码,8 位键数据编码(D0~D7)以及他的反码。
用户码和键数据码的发送均是低位在前,高位在后。
如上图1 所示:一帧完整的发射码有引导码、用户编码和键数据码三部分组成。
引导码由一个4.5ms 高电平脉冲及 4.5ms 的低电平脉冲组成;八位用户编码,被连续发送两次:八位的键数据码也被连续发送两次,第一次发送的是键数据码的原码,第二次发送的是键数据码的反码。
“1”和“0”的区分取决于脉冲之间的时间,称之为脉冲位置调制方式(PPM)。
波形如图 4。
当SEL接DRV0 脚时,选中的8 位用户编码为(C7-C0:00001110(0EH)),该码型的输出波形如图2所示,重复码波形如图3所示,“1”和“0”的波形如图 4所示,载波波形如图5所示:“1”和“0”的区分取决与脉冲之间的时间,称之为脉冲位置调制方式(PPM),如图4所示。
发射端输出高电平时按图5的载波波形发送:频率:38KHz;占空比:1/3。
2、UPD6122 和PT2222 编码方式:PT2222与 upd6122 的编码方式完全一致,该码型所发射的一帧码含有一个引导码,8 位的用户编码(例如C7~C0=14H)及其反码,8 位的键数据码及其反码。
下图给出了这一帧码的结构。
如上图6所示,引导码由一个9ms 的载波波形和4.5ms 的关断时间构成,它作为随后发射的码的引导。
在发重复码时,引导码由一个9ms 的载波波形和 2.25ms 的关断时间构成。
每次8 位的码被传送的同时,它们的反码也被传送。
当SEL 接DRV6 脚时,选中的8 位用户编码为(C7~C0=14H),其输出波形如图7,图8,图9所示:编码采用脉冲位置调制方式(PPM),利用之间的时间间隔来区分“0”和“1” ,其波形同图10。
晶体管测试仪使用说明
晶体管测试仪使用说明输入电压:直流6.8V-12V工作电流30mA左右,输入7.5V直流电压时实测●晶体管测试仪控制测试仪由一个旋转编码器开关控制,旋转编码器开关一共可以有4种操作,短按、长按、左旋、右旋。
在关机状态下短按一次,就能打开电源,开始测试。
在一次测试完成后,如果没有检测到器件。
长按开关或者左右旋转开关可以进入功能菜单,进入功能菜单后,左旋或者右旋开关可以在菜单项上下选择,要进入某一个功能项,则短按一次开关。
当需要从某个功能里退出时,则长按开关。
●测试器件测试仪一共有3个测试点,TP1、TP2、TP3。
这三个测试点在测试座里的分布如下:在测试座的右边是贴片元件的测试位置,上面分别有数字1,2,3,各代表TP1、TP2、TP3测试只有2个引脚的元件时,引脚不分测试顺序,2个引脚任意选择2个测试点,3个脚的器件引脚分别放到三个测试点中,不分顺序。
经过测试后,测试仪自动识别出元件的引脚名称、所在的测试点,并显示在屏幕上。
测试只有2个脚的元件时,如果使用的是TP1和TP3两个测试点,则测试完成后自动进入连续测试模式,这样可以连续的同步测量TP1和TP3上的元件,不用再按开关。
如果使用的是“TP1和TP2”或者“TP2和TP3”测试,则只测试一次。
要再一次测试则按一次开关。
测试电容器前,先给电容器放电,再插入测试座测量,否则有可能损坏测试仪的单片机。
●校准测试仪校准是用于消除自身元器件的误差,使得最后的测试结果更加精确。
校准分为快速校准和全功能校准。
快速校准的操作方法:用导线将三个测试点TP1、TP2、TP3短接,然后按下测试按钮,同时注意观察屏幕。
屏幕颜色会变成黑底白字,在出现提示信息”Selftest mode..? ”后,按一下测试按钮,就进入到快速校准过程;如果在出现提示信息“Selftest mode..?”后,2秒钟内没有按键,则进行一次正常的测试过程,最后显示出短接TP1、TP2、TP3三个测试点导线的电阻值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
8.7uS
载波频率=fosc/12=38kHz
26.3uS
图 5 载波波形
网址:
电话:0755-26869575, 576, 577 传真:0755-26869574
第4页共9页
TChip 深圳市明芯微电子有限公司
四.工作模式
Shenzhen TChip Micro-electronics Ltd
的键盘,共 32 键。键盘矩阵如下表所示:
输出 输入
KO0
KO1
KO2
KO 3 KO 4 KO 5 KO 6 KO 7
(PIN19) (PIN18) (PIN17) (PIN16) (PIN15) (PIN14) (PIN13) (PIN12)
(000) (001) (010) (011) (100) (101) (110) (111)
引导码
S S S S S S S S S S S S S S S S DDDDDDDDDDDDDDDDS 01234567012345670123456701234567Y
用户码
用户码
数据码
数据码的反码
图 1 TC9012 的发射码的格式
二.用户编码选择
用户编码一共有8种,是利用“SEL”脚与“KO0~KO7”中的任一脚相连接来进行选择的。请
如下表:
首按键 组合键
D0
D1
D2
D3
D4
D5
D6
D7
K22
1
0
1
0
1
1
0
0
K21
K23
0
1
1
0
1
1
0
0
K24
1
1
1
0
1
1
0
0
K26
1
0
0
1
1
1
0
0
K25
K27
0
1
0
1
1
1
0
0
K28
1
1
0
1
1
1
0
0
除这六种之处的双键或多键按下都将被视为无效按键,无发射码输出。另外,双重按键的操作 是分按键先后顺序的,必须先按住 K21 或 K25 键,再按其它相应组合键 K22~K24 或。
LMP 低电平输出电流
IOL
输入下拉电阻
RON
VDD =3.0V VDD =3.0V VOH=1.5V,VDD=3V VOL=1.5V,VDD=3V VDD=3.0V
0.7 VDD 0 5 1 30
典型值 3.0
5 50
最大值 3.6 1.0
1
VDD 0.3 VDD
100
单位 V mA
uA
V V mA mA KΩ
K13
K14
K15
K16
K17
K18
K19
K20
K21
K22
K23
K24
K25
K26
K27
K28
K29
K30
K31
K32
以下为遥控器布图的注意事项: 1、将电源滤波电容尽可能靠近IC;电源滤波电容只需要使用104的瓷片电容即可; 2、尽可能避免电源和地线走线过长或过细; 3、尽可能把晶振电路放置在离芯片较近的位置; 4、建议在三极管的发射极使用2欧姆的限流电阻;
TChip 深圳市明芯微电子有限公司
Shenzhen TChip Micro-electronics Ltd
TC9012
TC9012 是一块用于东芝系列红外遥控系统中的专用发射集成电路,采用 CMOS 工艺制造。它可外接
32 个按键, 提供 8 种用户编码,另外还具有 3 种双重按键功能。TC9012 的管脚设置和外围应用线
LMP KO7 KO6
KO5 KO4 KO3
KO2 KO1 KO0
SEL
VSS OSCI
OSCO NC VDD
REM KI3 KI2 KI1
KI0
10 9 8 7 6 5 4 3 2 1
TC9012
100
104
VDD=3V
150pf 150pf 2
K1
K2
K3
K4
K5
K6
K7
K8
K9
K10
K11
K12
空脚 晶振输出 晶振输入 电源负端(接地) 8 位输出脚 用于键盘扫描输出 指示灯输出 用于用户编码选择跳线 (平时为高电平,内置下拉电阻)
网址:
电话:0755-26869575, 576, 577 传真:0755-26869574
第2页共9页
TChip
功能说明
深圳市明芯微电子有限公司
路都进行了高度优化,以配合 PCB 的布图和低成本的要求。
主要特点
低压 CMOS 工艺制造 低功耗超小静态电流 低工作电压(VDD=2.0~5.0V) 32+3 条指令码 8 种用户编码可选择 TSOP-20、SOP20、COB 可选的封装形式
应用范围
电视机、组合音响设备、录音卡座、VCD、DVD 播放机
20 250 -40~+125 -20~+75
TC9012
单位 V V V mA mw ℃ ℃
推荐工作条件(除非特别说明,Tamb=25℃)
参数
符号
电源电压 振荡频率
VDD Fosc
输入电压
VIN
最小值 2.0 400 0
典型值 3.0 455 --
最大值 3.6 500 VDD
单位 V
KHz V
电气参数(除非特别说明,Tamb=25℃,VDD=3.0V)
4.5m125ms ms
ms 2.25ms
0 1 1 1 00000 1 1 1 0000
上图中8位客户码为S0/S1/S2/S3/S4/S5/S6/S7=011100000 16进制从高位往低位读数为0EH
4.5ms
4.5ms
9ms 0.56ms
0.56ms
KI2
(PIN3) (10)
K3
K7
K11
K15
K19
K23
K27
K31
(02H) (06H) (0AH) (0EH) (12H) (16H) (1AH) (1EH)
KI3
(PIN4) (11)
K4
K8
K12
K16
K20
K24
K28
K32
(03H) (07H) (0BH) (0FH) (13H) (17H) (1BH) (1FH)
类型 IN
5 6 7 8 9 10 19~12
11 20
REM VDD NC OSCO OSCI VSS KO0-KO7
LMP SEL
OUT
OUT IN OUT OUT IN
描述 4 位输入脚 用于键盘扫描输入 (平时为低电平,内置下拉电阻) 带载波的遥控信号输出 电源正端(2.0V~4.0V)3V(典型)
Shenzhen TChip Micro-electronics Ltd
TC9012
一.编码方式
TC9012 的一帧数据中含有 32 位码,包含两次 8 位用户码,8 位数据码和 8 位数据码的反码及 最后位的同步位。引导码由 4.5ms 的载波和 4.5ms 的载波关断波形所构成,以作为用户码、数据码以 及他们的反码的先导。同步位(SY)是标志最后一位编码是“0”或“1”的标识位,它只有 0.56ms 的有载波信号构成。发射码的格式如下图 1所示:
第3页共9页
TChip 深圳市明芯微电子有限公司
三.遥控器输出波形
Shenzhen TChip Micro-electronics Ltd
长按键发码示意图
TC9012
54.36~71.88ms 108ms
108ms
4.5ms
4.5ms 客户码8位 客户码8位 数据码8位 数据码的反码
8位 上图中发码16进制读数为客户码0E 0EH,数据码为0BH
结构框图
KI0 1 KI1 2 KI2 3 KI3 4
指令信号译码
按
器
键
编
码
器
产定生时器z
扫描信号发生器
振荡 电路
SEL 20
用户码 转换器
码调制 电路
输出 缓冲器
19 18 17 16 15 14 13 12 KO0 KO1 KO2 KO3 KO4 KO5 KO6 KO7
98 OSCI OSCO
5
例如:当按下 K21 时,系统先发出 K21 的键值 K7~K0=00010100,然后按下 K22 时,系统则发 出双重按键码 K7~K0=00110101。
网址:
电话:0755-26869575, 576, 577 传真:0755-26869574
第5页共9页
TChip 深圳市明芯微电子有限公司
值为 K7~K0=00011110。
键一直按着,将一帧码发完后发固定的重复码;当键松开时,等该帧码发完后进入低功耗模式。
用户码和键数据码的发送均是低位在前,高位在后。
六.双重按键操作
TC9012 的双重按键方式一共有六种: K21 键与 K22~K24 的组合, K25 键与 K26~K28 的组合,
参数说明
Shenzhen TChip Micro-electronics Ltd
极限参数(除非特别说明,Tamb=25℃)
参数
符号
电源电压
VDD
输入电压
VIN
输出电压
VO
输出电流
IO
功耗
PD
贮存温度
Tstg