PCA82C250(CAN总线收发器)
广州周立功单片机 PCA82C250 CAN收发器 说明书
5.1 总线电缆阻抗的影响 ........................................................................................................ 10 5.2 节点的最大数量 ................................................................................................................11 5.3 举例 ..................................................................................................................................11
y 物理信令
位编码 定时和同步
y 物理媒体连接 驱动器和接收器特性
y 媒体相关接口 总线连接器
本文档着重介绍如何使用 Philips 半导体的收发器 PCA82C250[1]和 PCA82C251[2]实现物理媒体连接子
层 物理信令子层和数据链路层之间的连接是通过集成的协议控制器实现的 这些产品有像 Philips 的
12V
最大的总线终端 DC 电压 0V<VCC<5.5V ;VCANL,H<+18V -150V<Vtr<+100V
扩展扇出应用时最小收发器电源电压 RL=45
多通道实时CAN总线模拟器设计
多通道实时CAN总线模拟器设计作者:王会敏张遂南来源:《现代电子技术》2009年第22期摘要:为了满足CAN总线在实际通信应用中高实时性和高可靠性的要求,通过对CAN总线通信协议的研究,提出并设计一种由单片机负责控制的多通道实时CAN总线模拟器的设计方案。
该方案在硬件设计上以可编程逻辑技术为基础,采用复杂可编程逻辑器件(CPLD),结合硬件描述语言VHDL,实现了单片机与CAN控制器之间逻辑控制单元的设计。
通过在Xilinx ISE平台下对该程序进行编译和综合,在Modelsim 环境下进行仿真测试,证实了该方案的可行性。
通过实际工程的验证和使用结果表明,该设计方案满足实际通信的要求。
着重阐述整个系统的设计过程,并给出了关键技术的设计思路与重要部分代码。
关键词:CAN;实时性;单片机中图分类号:TP274CAN总线与一般的串行通信总线相比,它的数据通信具有可靠性高,实时性高,灵活性强等优点,不仅广泛应用于汽车行业,而且扩展到了机械工业、机器人、数控机床等诸多领域。
尤其在大量数据通信处理中,高可靠性及实时响应的场合,单通道CAN总线不能满足实际通信的要求。
为此,介绍一种基于多通道实时CAN模拟器的设计方案。
1 CAN总线技术介绍1.1 CAN总线特性CAN(Controller Area Network)总线是一种串行多主站控制器局域网总线。
它具有很高的网络安全性、通信可靠性和实时性,并且简单实用,网络成本低。
它主要用于各种过程监测及控制的一种网络。
CAN最初是由德国BOSCH公司为汽车的监测、控制系统而设计的。
由于CAN 总线具有卓越的特性和极高的可靠性,特别适合于工业过程中监控设备的互连,具体来说,CAN具有如下特性(1) CAN可以多主方式工作,网络上任意一个节点均可以在任意时刻主动地向网络上的其他节点发送信息,而不分主从,通信方式灵活(2) CAN可以点对点、点对多点(成组)及全局广播方式传送接收数据(3) CAN网络上的节点信息可分成不同的优先级,可以满足不同的实时要求(4) CAN采用非破坏性总线仲载技术。
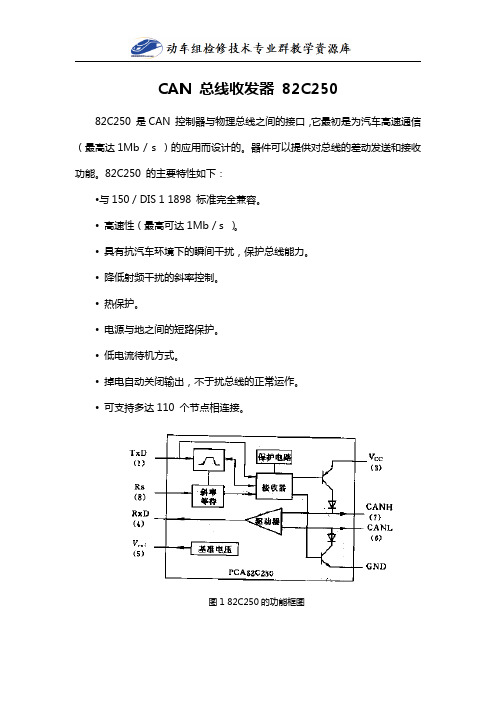
10CAN 总线收发器 82C250
Rs管脚上的强制条件
工作方式
Rs上的电压或电流
>0.75 Vcc
待机方式
<10μA
10μA< <200μA
斜率控制
0.4Vcc< <0.6Vcc
<0.3 Vcc
高速方式
— <500μA
在高速工作方式下,发送器输出晶体管以尽可能快的速度启闭,在这种方式下不采取任何措施限制上升和下降斜率。此时,建议采用屏蔽电缆以避免射频干扰问题的出现。选择高速工作方式时只需将图1 中的引脚8 接地即可。
则悬浮
若> 0. 75V则悬浮
隐性
X
对于CAN 控制器及带有CAN 总线接口的器件,82C250并不是必须使用的器件,因为多数CAN 控制器均具有配t 灵活的收发接口,并允许总线故障,只是驱动能力一般只允许20~30 个节点连接在一条总线上。而82C250 支持多达110 个节点,并能以1Mb / s 的速率工作于恶劣电气环境下。
• 具有抗汽车环境下的瞬间干扰,保护总线能力。
• 降低射频干扰的斜率控制。
• 热保护。
• 电源与地之间的短路保护。
• 低电流待机方式。
• 掉电自动关闭输出,不于扰总线的正常运作。
• 可支持多达110 个节点相连接。
图1 82C250的功能框图
表1 82C250基本参数
符号
参 数
条件
最小值
典型值
最大值
表3 82C250真值表
电源
TxD
CANH
CANL
总线状态
RxD
4.5 -5.5V
0
高电平
低电平
显性
CAN收发器解析讲课教案

8
输出
功能
共模稳压 输出
低电平CA N电压输 入/输出
高电平CA N电压输 入/输出
待机模式 控制输入
授人以鱼不如授人以渔
2. CAN收发器TJA1040
(1)正常模式 收发器通过总线CAN-H和CAN-L 发送和接收数据。 (2)待机模式 发送器和接收器都关闭,只用低 功耗的差动收发器监控总线。 (3)分解网络 分解网络为0.5VCC的直流稳压源, 只在正常模式中接通。 (4)唤醒 在待机模式中,总线由低功耗的差动 比较器监控。
— —
CAN⁃H、CAN ⁃L端子直流电压 ()/V
差动总线电压 (ΔV)/V
差动输入电压 (隐性值)()/ V
待机模式 0<<5.5V
V1=1V 非待机模式
— -8
1.5 -1.0
0.1 —
— —
授人以鱼不如授人以渔
最大值 5.5 70 14 0.17 18
3.0 0.4
(2)PCA82C250的结构
授人以鱼不如授人以渔
2. CAN收发器TJA1040
图3-53 TJA1040功能框图
授人以鱼不如授人以渔
符号 TXD
GND
2. CAN收发器TJA1040
表3-68 TJA1040端子功能
端子 1
2
功能
发送数据 输入
搭铁
符号 SPLIT
CAN⁃L
端子 5
6
3
电源电压 CΒιβλιοθήκη N⁃H 7RXD4
接收数据 STB
表3-64 PCA82C250基本性能参数
差动输入 非待机模式 1.0
—
电压(显性
值)()/V
传播延迟 高速模式
CAN控制器芯片介绍

SJA1000是一种I/O设备基于内存编址的微控制器,与其它控制器(CPU)之间的操作是通过象RAM一样的片内寄存器读写来实现的。
微处理器 (CPU)
CAN收发器
控制寄存器
SJA1000 CAN控制器
命令寄存器
状态寄存器
中断寄存器
验收代码寄存器
验收屏蔽寄存器
….
….
CAN BUS
收发器主要特性
完全符合ISO11898标准;高速率(最高达1Mbps);具有抗汽车环境中的瞬间干扰,保护总线能力;斜率控制,降低射频干扰(RFI);差分接收器,抗宽范围的共模干扰,抗电磁干扰(EMI)热保护;防止电池和地之间的发生短路;低电流待机模式;未上电的节点对总线无影响;可连接110个节点。
VSS3
15
输出驱动器接地
/INT
16
中断输出用于中断微控制器(CPU)/INT在内部中断寄存器各位都被置位时低电平有效/INT是开漏输出且与系统中的其它/INT是线或的此引脚上的低电平可以把IC从睡眠模式中激活
/RST
17
如C=1F;R=50k
VDD2
18
输入比较器的5V电压源
RX0,RX1Biblioteka 19,20从物理的CAN总线输入到SJA1000的输入比较器;支配控制电平将会唤醒SJA1000的睡眠模式;如果RX1比RX0的电平高,就读支配控制电平,反之读弱势电平,如果时钟分频寄存器的CBP位被置位就旁路CAN输入比较器以减少内部延时(此时连有外部收发电路)这种情况下只有RX0是激活的;弱势电平被认为是高,而支配电平被认为是低。
PCA82C250功能框图
硬件结构
PCA82C250管脚图
工作模式
PCA82C250T恩智浦CAN-bus收发器

1. General descriptionPCA82C250是CAN协议控制器和物理总线之间的接口。
该器件为总线提供差分传输功能,为CAN控制器提供差分接收功能。
它主要用于高速汽车应用(最大1 MBd)。
该设备为总线提供差分发送功能,为CAN控制器提供差分接收功能。
它与“ ISO 11898”标准完全兼容。
2. Features and benefits●完全兼容“ ISO 11898”标准●高速(高达1 MBd)●防止汽车环境中瞬变的总线●斜率控制以减少射频干扰(RFI)●具有宽共模范围的差分接收器具有很高的抗干扰能力●电磁干扰(EMI)●热保护●电池和接地短路保护●低电流待机模式●断电的节点不会干扰总线●至少可以连接110个节点3. Applications高速汽车应用(高达1 MBd)。
4. Quick reference dataTable 1. Quick reference dataSymbol Parameter Conditions Min Max UnitV CC supply voltage 4.5 5.5 VI CC supply current Standby mode - 170 A1/t bit maximum transmission speed non-return-to-zero 1 - MBdV CAN CANH, CANL input/output voltage 8 +18 VV diff differential bus voltage 1.5 3.0 Vt PD propagation delay High-speed mode - 50 nsT amb ambient temperature -40 +125 C5. Ordering informationTable 2. Ordering informationType number PackageName Description Version PCA82C250T SO8 plastic small outline package; 8 leads; body width 3.9 mm SOT96-1 6. Block diagram7. Pinning information7.1 Pinning7.2 Pin descriptionTable 3. Pin descriptionSymbol Pin DescriptionTXD 1 transmit data inputGND 2 groundV CC 3 supply voltageRXD 4 receive data outputV ref 5 reference voltage outputCANL 6 LOW-level CAN voltage input/outputCANH 7 HIGH-level CAN voltage input/outputRs 8 slope resistor input8. Functional descriptionP CA82C250是CAN协议控制器和物理总线之间的接口。
SIT82C250-datasheet_V1.3

图1 SIT82C250引脚分布图特点:完全兼容“ISO 11898-12V ”标准, 可应用于12V 电源系统;Rs 脚斜率控制以降低RFI ; 内置过温保护; 过流保护功能; 低电流待机模式未上电节点不干扰总线;至少允许110个节点连接到总线; 高速CAN ,传输速率可达到1Mbps ;高抗电磁干扰能力;产品外形:描述SIT82C250是一款应用于CAN 协议控制器和物理总线之间的接口芯片,可应用于小汽车、工业控制等领域,速率可达到1Mbps ,具有在总线与CAN 协议控制器之间进行差分信号传输的能力。
提供绿色环保无铅封装极限参数最大极限参数值是指超过这些值可能会使器件发生不可恢复的损坏。
在这些条件之下是不利于器件正常运作的,器件连续工作在最大允许额定值下可能影响器件可靠性,所有的电压的参考点为地。
引脚定义总线发送器直流特性(如无另外说明,V CC=5V±10% ,Temp=T MIN~T MAX,典型值在V CC=+5V,Temp=25℃)总线接收器直流特性高电平输出电压Pin4 I4=-100uA 0.8V CC V CC V(如无另外说明,V CC=5V±10% ,Temp=T MIN~T MAX,典型值在V CC=+5V,Temp=25℃,V1=4V;Pin6与Pin7由外部驱动,-2V<(V6,7)<7V)NOTE1:包括高速、斜率控制与待机模式。
参考电压输出(如无另外说明,V CC=5V±10% ,Temp=T MIN~T MAX,典型值在V CC=+5V,Temp=25℃)动态特性参数(如无另外说明,RL=60Ω;CL=100pF;见图2,图3)(如无另外说明,V CC=5V±10% ,Temp=T MIN~T MAX,典型值在V CC=+5V,Temp=25℃)待机与斜率控制(pin8)(如无另外说明,V CC=5V±10% ,Temp=T MIN~T MAX,典型值在V CC=+5V,Temp=25℃)供电电流(如无另外说明,VCC=5V±10% ,Temp=T MIN~T MAX,典型值在VCC=+5V,Temp=25℃)NOTE2:I1=I4=I5=0mA; 0V<V6,V7<V CC;V8=V CC;T amb<90℃功能表表1 CAN收发器真值表(1):不关心(2):如果总线上其它节点在传输显性位,则RXD=0。
82C250

82 90
V8=1V; VCC<5.5V Tamb<+125
90
tonRXD
延迟发送至接收 器活跃时
R8=47K R8=24K
390 260
toffRXD
延迟发送至接收 器不活跃时
R8=47K R8=24K
260 210
不同的输出电压
¦SR¦
转换率
R8=47K
广州周立功单片机发展有限公司 Tel:020)87535042 87583987 13808868685
PCA82C250 CAN 控制器
1. 特性 ! 完全和 ISO11898 标准兼容 ! 高速(高达 1Mbaud) ! 在自动化环境中 总线保护瞬变 ! 斜率控制降低射频干扰(RFI) ! 不同的接收器都具有宽共模范围 有很强的抗电磁干扰 EMI 的能力 ! 热保护 ! 对电池和地的短路保护 ! 低电流备用模式 ! 一个没有上电的节点不干扰总线 ! 至少可挂 110 个节点
7. 限定值 根据完全最大循环系统(IEC60134);所有的电压以管脚 2 为参考; 正极输入电流
-3-
广州周立功单片机发展有限公司 Tel:020)87535042 87583987 13808868685
标记
参数
条件
最小
最大
单位
VCC
提供电压
Vn
在 管 脚 1,4,5,8 上的 DC 电压
0.3VCC< VRS<0.6VCC IRS< 500 A
管脚 8 RS 有三种不同的工作模式可被选择: 高速 备用 斜率控制 对于高速工作模式 发送器输出级晶体管被尽可能地快启动和关闭 在这种模式下 没有措施用于限制上升和下降的斜度 建议使用屏蔽电缆可避免 RFI 这种问题 通过把 管脚 8 接地选择这个模式 对于低速或较短的总线长度 可使用一种没有屏蔽的双绞线或平行线 对于降低 RFI 上升和下降的斜率是个限定值 上升和下降的斜率能够被编程 通过从管脚 8 接 一个电阻至地 这个斜率和管脚 8 的电流输出成比例 如果高电平被接至管脚 8 电路进入低电流保护模式 在这种模式下 发送器被关 闭 接收器开至低电流 如果控制位被检测 (不同的总线电压<0.9V) RXD 将被开至 低电平 这个微型控制器应对这个条件有所反应 通过转换收发器至正常工作状态 (经过管 脚 8)因为这个接收器在备用模式下比较慢 第一条信息会丢失掉
CAN控制器芯片介绍

2,1,2823
3 4 5 6 7 8 9 10 11
多路地址/数据总线
ALE输入信号Intel模式AS输入信号Motorola模式 片选输入低电平允许访问SJA1000 微控制器(CPU)的/RD信号Intel模式或E使能信号Motorola模 式 微控制器(CPU)的/WR信号Intel模式或RD//WR信号 Motorola模式 SJA1000产生的提供给微控制器(CPU)的时钟输出信号时钟信 号来源于内部振荡器且通过编程驱动时钟控制寄存器的时钟关闭 位可禁止该引脚 接地 输入到振荡器放大电路外部振荡信号由此输入注1 振荡放大电路输出使用外部振荡信号时左开路输出注1 模式选择输入1=Intel模式0=Motorola模式
验收滤波器(ACF)
验收滤波器把它其中的数据和接收的识别码的内容 相比较,以决定是否接收信息。在纯粹的接收测试 中,所有的信息都保存在RXFIFO中。
SJA1000的内部结构及功能
位流处理器(BSP)
位流处理器是一个在发送缓冲器、RXFIFO 和CAN 总线之间, 控制数据流的程序装置,它还在CAN 总线上执行错误检测、 仲裁填充和错误处理。 位时序逻辑监视串口的CAN总线和处理与总线有关的位时序。 它在信息开头的总线传输时同步CAN 总线位流(硬同步), 接收信息时再次同步下一次传送(软同步)BTL 还提供了可 编程的间段来补偿传播延迟时间、相位转换(例如:由于振 荡漂移)和定义采样点和一位时间内的采样次数。 EML负责传送层模块的错误管制。它接收BSP 的出错报告。通 知BSP 和IML 进行错误统计。
工作模式
准备模式
管脚8如果接至高电平,则电路进入低电流 待机模式。在这种模式下,发送器被关闭, 而接收器转至低电流。
增强的环境温度范围-40- 125℃82C250CAN总线收发器
33
嵌入式以太网设计
34
以太网接口的基本知识
1、传输编码
曼彻斯特编码
差分曼彻斯特编码
35
以太网协议
PR 56位
以太网MAC层物理传输帧 (IEEE802.3 )
SD 8位 DA 48位 SA 48位 TYPE 16位 DATA 不超过1500字节 PAD 可选 FCS 32位
PR: 同步位,收发双方的时钟同步,也指明传输的速率(10M、100M) SD: 分隔位,表示下面跟着的是真正的数据,而不是同步时钟 DA: 目的地址,以太网的地址为48位地址。如果为都为F,则是广播地址 SA: 源地址,48位,表明该帧的数据是哪个网卡发的,即发送端的网卡地址 TYPE:类型字段,表明该帧的数据是什么类型的数据。如:0800H 表示数 据为IP包,0806H表示数据为ARP包,814CH是SNMP包,8137H
23
+5V
一个瞬时接触开关( 按钮)放置在每一行与线一 列的交叉点。矩阵所需的键 的数目显然根据应用程序而 不同。每一行由一个输出端 口的一位驱动,而每一列由 一个电阻器上拉且供给输入 端口一位。
行 (输出端口)
B1 1 2 3
B2 4 B3 5 6
7
列 (输入端口)
8
9
B1 B2 B3
24
键盘扫描过程就是让微处理器按有规律的时间间隔查看 键盘矩阵,以确定是否有键被按下。每个键被分配一个称为扫 描码的唯一标识符。应用程序利用该扫描码,根据按下的键来 判定应该采取什么行动。
如果有需要,也可以直接使用芯片上的内置LCD控制器 来构造显示模块,它可以支持彩色/灰度/单色三种模式,灰度 模式下可支持4级灰度和16级灰度,彩色模式下最多支持256色 ,LCD的实际尺寸可支持到320X240。
基于单片机的CAN总线通讯实现

基于单片机的CAN总线通讯实现姓名:班级:指导教师:摘要CAN总线是控制器局域网总线(Controller Area Network)的简称。
属于现场总线的范畴,是一种有效支持分布式控制或实时控制的串行通信网络。
CAN总线是一种多主方式的串行通讯总线,是国际上应用最广泛的现场总线之一,现已被应用到各个自动化控制系统中,从高速的网络到低价位的多路接线都可以使用CAN总线。
本文重点就基于单片机的CAN总线通信设计的实现进行介绍,通过CAN 控制器以及CAN收发器把串口发送来的数据转换成CAN通信的数据,然后又把数据转换成串口通信数据回发给计算机,实现数据的自发自收。
关键词:CAN总线;AT89S52;SJA1000;PCA82C250Communication of MCU based on CAN-bus Abstract:CAN-bus,which is controller LAN-bus (contro1ler Area Network) for short.,belongs to the category of field bus, which is a kind of effective support distributed control or real-time control of serial communication network. CAN-bus is a main way more than the serial communication bus, which is one of the most widely used international field bus. It has been used in various automatic control system, from the network to the low price of multi-channel wiring CAN. This paper,which focuses on the CAN bus communication design, is based on the MCU to achieve . Through the CAN controller and CAN transceiver, the data is converted to the serial port to send the CAN communication data, and then put the data into the serial communications data back to the computer of spontaneous self-received.Key words:CAN- bus; A T89S52 devices; SJA1000; PCA82C250目录第一章前言 (1)1.1 概述 (1)1.2 CAN总线的特点 (2)1.3 CAN总线的发展前景 (4)第2章系统方案总体设计 (5)2.1 系统原理 (5)2.2系统总体设计方框图 (5)2.2.1 51单片机 (6)2.2.2 CAN总线收发器 (9)2.2.3 CAN总线控制器 (12)2.2.4 光耦合器 (14)第3章系统硬件设计 (17)3.1系统硬件的基本组成部分 (17)3.2 单片机电路设计 (17)3.3 CAN总线控制器电路设计 (18)3.4 CAN总线收发器电路设计 (18)第4章软件设计 (19)4.1软件设计方框图 (19)4.2 CAN初始化 (20)4.3 SJA1000初始化 (20)4.4 发送与接收 (21)第5章系统调试 (23)结论 (25)致谢 (26)参考文献 (27)附录一 (29)附录二 (30)第一章前言1.1 概述控制器局域网(CAN-Controller Area Network)属于现场总线(Fieldbus)的范畴,是众多的属于现场总线标准之一,它适用于工业控制系统,具有通信速率高、可靠性强、连接方便、性能价格比高等诸多特点。
基于CAN总线驱动器PCA82C250的多主结构分布式工业测控系统的应用研究

摘
要 :本 文 给 出 一 种 全 新 的 、 于 C N 总 线驱 动器 P A 2 2 0的 分 布 式 工 业 测 控 系 统 的 网 络组 成 。该 系统 克 服 了 R .8 基 A C 8C5 S4 5的许离远 、 A 传输速率快 、 可靠性高等的特点 , 又具有等 同于 R .3 S2 2的编程容易 、 E简单的优势 , 以使 接 l 可 工程师完全摆脱对 C N控制器 8 c 0 ( A 2 2o 或者 s10 ) j0 0 的接 口和编程 。实际应 用表 明 , 这是一种可以替代 R .8 , S4 5 组成简易 、 实用
山 东 科 技大 学 (5 0 1 刘 20 3 )
明
朱其刚
李 世 光
( h nog U ir t o c nead Tcnl y20 3 ) LuMi Z uQgn L S i a g Sa dn nv sy fSi c n e oo 5 0 1 ei e h g i n g h i g i h un a g
越多。我们从 9 7年开始在工业 测控系统设计 中应用基
于 C N的 分 布 式 测 控 系 统 , 应 用 的效 果 来 看 , A 从 效果 是 非 常 理 想 的 。通 常 基 于 C N B S的工 业 测 控 系 统 的组 A U
成框图如图 1 示。 所
CAN收发器PCA82C251T TJA1040T应用方案

PCA82C250T PCA82C251T是NXP恩智浦推出的CAN协议控制器和物理总线之间的接口。
它主要在卡车和公共汽车中速度达1Mbaud的应用中使用。
这个器件向总线提供了差动的发送能力,向CAN 控制器提供了差动的接收能力。
PCA82C251T特性·完全符合ISO 11898-24 V 标准·斜率控制减少RFI·热保护·在24V 系统中防止电池对地的短路·待机模式电流低·不上电的节点不会影响总线线路·至少可以连接110 个节点·高速可达1Mbaud·对电磁干扰有高的抗干扰性PCA82C251T管脚助记符管脚描述TXD 1 发送数据输入GND 2 地VCC 3 电源电压RXD 4 接收数据输出Vref 5 参考电压输出CANL 6 输入输出低电平 CAN 电压CANH 7 输入输出高电平 CAN 电压S 8 斜率电阻输入PCA82C251T电气特性VCC= 4.5 ~5.5V ;Tamb= -40 ~+125℃; RL =60Ω;I8 > -10μA 除非另外说明,所有电压均以接地点(管脚2)为参考,输入电流为正。
所有参数在所设计的环境温度范围内均可确保,但仅在+25 时下进行100%的测试。
目前世界上使用最广泛的CAN收发器当属NXP(原飞利浦半导体)的各种收发器了。
过去的一些PCA82C250/251就不说了,在很多场合都已经有很广泛的应用。
通过工艺改造和技术创新,前些年,飞利浦推出了TJA1050和TJA1040两款升级的CAN收发器。
也在各种场合得到了很广泛的使用。
MCP2515 MCP2551是微芯公司生产的一款CAN收发器,在市面上也有一定的使用,但广泛程度远远低于TJA1050。
这两款芯片都是新的收发器,但为什么会发生一边倒的局面呢。
下面从一些重要的方面进行比较(TJA1040性能远高于MCP2551,故不做对比):1.最低波特率:新的CAN收发器为了防止MCU的TXD管脚长时间处于低电平,从而影响总线。
PCA82C250相关资料

PCA82C250相关资料一、PCA82C250的性能特点(1)完全符合“ISO 11898”标准;(2)高速(高达1兆字节每秒);(3)总线保护,以防止在自动环境中瞬变;(4)斜率控制以降低射频干扰;(5)差分接收器具有宽的共模范围强的抗电磁干扰能力(6) 热保护;(7)低电流待机模式;(8) 无源节点不干扰总线;(9) 可连接至少110节点。
二、的引脚介绍DIP封装的PCA82C250的引脚排列见图1.1,其引脚功能描述见表1.1。
图1.1 PCA82C250表1.1 DS18B20详细引脚功能描述1 TXD 发送数据 5 Vref 参考电压输出2 GND 接地 6 CANL 低电位总线电压3 Vcc 工作电压7 CANH 高电位总线电压4 RXD 接收数据8 Rs 斜率电阻输入三、DS18B20的内部结构DS18B20的内部结构框图如图1.2所示:图1.2 DS18B20内部结构图PCA82C250/251 收发器的典型协议控制器通过串行数据输出线TX和串行数据输入线RX连接到收发器收发器通过有差动发送和接收功能的两个总线终端CANH和CANL连接到总线电缆输入Rs用于模式控制参考电压输出VREF的输出电压是额定VCC的0.5倍其中收发器的额定电源电压是 5V .协议控制器输出一个串行的发送数据流到收发器的TxD引脚内部的上拉功能将TxD输入设置成逻辑高电平也就是说总线输出驱动器默认是被动的在隐性状态中CANH和CANL输入通过典型内部阻抗是17k的接收器输入网络偏置到2.5V 的额定电压另外如果TxD是逻辑低电平总线的输出级将被激活在总线电缆上产生一个显性的信号电平输出驱动器由一个源输出级和一个下拉输出级组成CANH连接到源输出级CANL连接到下拉输出级在显性状态中CAN_H的额定电压是3.5V,CAN_L是1.5V .如果位速率很高例如高于500kbit/s则应考虑使用延迟小于40ns的高速光耦,譬如:HCPL-7101.如果没有一个总线节点传输一个显性位总线处于隐性状态即网络中所有 TxD 输入是逻辑高电平另外如果一个或更多的总线节点传输一个显性位即至少一个TxD输入是逻辑低电平则总线从隐性状态进入显性状态线与功能.接收器的比较器将差动的总线信号转换成逻辑信号电平并在RxD输出接收到的串行数据流传送到总线协议控制器译码接收器的比较器总是活动的也就是说当总线节点传输一个报文时它同时也监控总线这就要求有诸如安全性和支持非破坏性逐位竞争CAN策略一些控制器提供一个模拟的接收接口RX0 RX1 RX0 一般需要连接到RxD输出RX1需要偏置到一个相应的电压电平这可以通过 VREF输出或一个电阻电压分配器实现.收发器直接连接到协议控制器及其应用电路如果需要电流隔离光耦可以放置在收发器和协议控制器之间,使用光耦时要注意选择正确的默认状态特别是在隔开的协议控制器电路一边没有上电时这种情况下连接到TxD的光耦应该是暗的即LED关断 ,当光耦是断开暗时收发器的TxD,输入是逻辑高电平,可以达到自动防故障的目的.使用光耦还要考虑到将Rs模式控制输入连接到高电平有效的复位信号,例如当本地收发器电源电压在斜率上升和下降过程中没有准备好的情况下禁能收发器.然而在协议控制器和收发器之间使用光耦通常会增加总线节点的循环延迟信号在每个节点要从发送和接收路径通过这些器件两次这将减少位速率给定时可使用的最大的总线长度这在计算由于CAN网络中的传播延迟而造成限制可以使用的最大总线长度时要考虑.。
PCA82C250应用指南中文资料
PCA82C250应用指南中文资料PCA82C250是一种高速CAN总线收发器,是具备微控制器和外部CAN 网络之间通信的关键部件。
它采用了一种灵活的发射器与接收器电平,并且具有宽电压范围的灵活IO供给电压。
该芯片能够提供可靠的通信和数据传输,同时也能保护主控制器不受电气干扰或故障的影响。
1. 高速数据传输:PCA82C250支持数据传输速率为1Mbit/s,满足了现代汽车系统的需求。
2.强大的电气特性:该芯片具有耐高噪声和电气干扰的能力,能够在恶劣的电气环境下正常工作。
此外,它还具有过温和过压保护功能,能够保护主控制器免受电路故障的影响。
3.灵活的IO供给电压:PCA82C250能够适应不同的供给电压,可以工作在宽范围的电压条件下,从而提供了更灵活的设计选项。
4.多种工作模式:该芯片支持5种不同的工作模式,包括主动模式、静默模式、自发回应模式、接收NECT和故障灯拉低模式等。
这些模式可以根据具体应用的需求进行选择。
5.高可靠性:通过引入多种保护功能,如故障诊断和防错保护机制,PCA82C250提高了系统的可靠性和稳定性。
PCA82C250在汽车电子控制系统中得到了广泛的应用,特别是在车身电子、发动机控制和传感器网络等方面。
它可以实现不同控制单元之间的高速数据传输,方便实现汽车各个系统之间的通信与协调,提高整个系统的性能和可靠性。
在使用PCA82C250时1.正确的引脚配置:根据应用需求,正确配置芯片的引脚,避免低水平输出或输入,以避免干扰和故障。
2.适当的电气和地线布线:保持线路布线简洁、紧凑,使电气和地线的传输路径尽量短,并且避免与其他干扰源相交叉。
3.适当的电源供应:确保提供稳定、可靠的电源供应,以确保芯片正常工作。
4.良好的故障诊断和错误处理机制:在系统设计中引入故障诊断和错误处理机制,以便及时检测和诊断可能发生的问题,并采取相应的措施进行处理。
总之,PCA82C250作为一种高速CAN总线收发器,在汽车电子控制系统中发挥着重要的作用。
基于STC89C51的CAN总线点对点通信模块设计
基于STC89C51的CAN总线点对点通信模块设计[导读]随着人们对总线对总线各方面要求的不断提高,总线上的系统数量越来越多,继而出现电路的复杂性提高、可靠性下降、成本增加等问题。
为解决上述问题,文中阐述了基于SJAl000的CAN总线通信模块的实现方法,该方法以PCA82C250作为通信模块的总线收发器,以SITA-l000作为网络控制器。
并以STCSTC89C5l单片机来完成基于STC89C5l的CAN通信硬件设计。
文章还就平台的初始化、模块的发送和接收进行了设计和分析。
通过测试分析证明,该系统可以达到CAN的通信要求,整个系统具有较高的实用性。
0 引言现场总线是应用在生产最底层的一种总线型拓扑网络,是可用做现场控制系统直接与所有受控设备节点串行相连的通信网络。
在工业自动化方面,其控制的现场围可以从一台家电设备到一个车间、一个工厂。
一般情况下,受控设备和网络所处的环境可能很特殊,对信号的干扰往往也是多方面的。
但要求控制则必须实时性很强,这就决定了现场总线有别于一般的网络特点。
此外,由于现场总线的设备通常是标准化和功能模块化,因而还具有设计简单、易于重构等特点。
1 CAN总线概述CAN (Controller Area Network)即控制器局域网络,最初是由德国Bosch公司为汽车检测和控制系统而设计的。
与一般的通信总线相比,CAN总线的数据通信具有突出的可靠性、实时性和灵活性。
其良好的性能及独特的设计,使CAN总线越来越受到人们的重视。
由于CAN总线本身的特点,其应用围目前已不再局限于汽车行业,而向自动控制、航空航天、航海、过程工业、机械工业、纺织机械、农用机械、机器人、数控机床、医疗器械及传感器等领域发展。
目前,CAN已经形成国际标准,并已被公认为几种最有前途的现场总线之一。
它的直线通信距离最大可以达到l Mbps/30m.其它的节点数目取决于总线驱动电路,目前可以达到110个。
2 CAN系统硬件设计图1所示是基于CAN2.0B协议的CAN系统硬件框图,该系统包括电源模块、MCU 部分、CAN控制器、光电耦合器、CAN收发器和RS232接口。
CD4051、6N137、PCA82C250T、SJA1000、ADC0809芯片介绍

CD4051、6N137、PCA82C250T、SJA1000、ADC0809芯片介绍CD4051芯片:CD4051相当于一个单刀八掷开关,开关接通哪一通道,由输入的3位地址码ABC来决定。
INH”是禁止端,当“INH”=1时,各通道均不接通。
此外,CD4051还设有另外一个电源端VEE,以作为电平位移时使用,从而使得通常在单组电源供电条件下工作的 CMOS电路所提供的数字信号能直接控制这种多路开关,并使这种多路开关可传输峰,峰值达15V的交流信号。
例如,若模拟开关的供电电源VDD=,5V,VSS=0V,当VEE=,5V时,只要对此模拟开关施加0,5V的数字控制信号,就可控制幅度范围为,5V,,5V的模拟信号。
使用十六进制代码就可以对CD4051进行操作了。
比如说P1=0X07,这样CD4051就选择的是7号(二进制111)通道了。
它的引脚图如下:其中引脚说明如下表:引脚号符号功能 1,2,4,5,12,13,14,15 IN/OUT 输入/输出端 9,10,11 A,B,C 地址端3 OUT/IN 公共输入/输出端 6 INH 禁止端7 VEE 模拟信号接地端 8 VSS 数字信号接地端 16 VDD 电源+它的真值表如下:INPUT STATES 输入状态 ON INHIBIT 禁止 C B A CD40510 0 0 0 00 0 0 1 10 0 1 0 20 0 1 1 30 1 0 0 40 1 0 1 50 1 1 0 60 1 1 1 71 * * * NONEADC0809芯片:ADC0809是采样频率为8位的、以逐次逼近原理进行模—数转换的器件。
其内部有一个8通道多路开关,它可以根据地址码锁存译码后的信号,只选通8路模拟输入信号中的一个进行A/D转换。
其中ADC0809的引脚图如下:ADC0809主要信号引脚的功能说明如下:IN7,IN0——模拟量输入通道ALE——地址锁存允许信号。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
NXP Semiconductors
PCA82C250
CAN controller interface
5. Ordering information
Table 2. Ordering information Package Name PCA82C250T SO8 Description plastic small outline package; 8 leads; body width 3.9 mm Version SOT96-1 Type number
Table 3. Symbol TXD GND VCC RXD Vref CANL CANH Rs Pin description Pin 1 2 3 4 5 6 7 8 Description transmit data input ground supply voltage receive data output reference voltage output LOW-level CAN voltage input/output HIGH-level CAN voltage input/output slope resistor input
6. Block diagram
VCC 3
TXD
1
PROTECTION
Rs
8
SLOPE/ STANDBY
DRIVER HS 7 CANH
RXD
4
RECEIVER 6 CANL
Vref
5
REFERENCE VOLTAGE
PCA82C250
2 GND
mka669
Fig 1.
Block diagram
7. Pinning information
8. Functional description
The PCA82C250 is the interface between a CAN protocol controller and the physical bus. It is primarily intended for high-speed automotive applications (up to 1 MBd). The device provides differential transmit capability to the bus and differential receive capability to the CAN controller. It is fully compatible with the “ISO 11898” standard. A current limiting circuit protects the transmitter output stage against short-circuit to positive and negative battery voltage. Although the power dissipation is increased during this fault condition, this feature will prevent destruction of the transmitter output stage. If the junction temperature exceeds a value of approximately 160 C, the limiting current of both transmitter outputs is decreased. Because the transmitter is responsible for the major part of the power dissipation, this will result in reduced power dissipation and hence a lower chip temperature. All other parts of the PCA82C250 will remain in operation. The thermal protection is needed, in particular, when a bus line is short-circuited. The CANH and CANL lines are also protected against electrical transients which may occur in an automotive environment. Pin 8 (Rs) allows three different modes of operation to be selected: High-speed, Slope control and Standby. For high-speed operation, the transmitter output transistors are simply switched on and off as fast as possible. In this mode, no measures are taken to limit the rise and fall slope. Use of a shielded cable is recommended to avoid RFI problems. The High-speed mode is selected by connecting pin 8 to ground. For lower speeds or shorter bus length, an unshielded twisted pair or a parallel pair of wires can be used for the bus. To reduce RFI, the rise and fall slope should be limited. The rise and fall slope can be programmed with a resistor connected from pin 8 to ground. The slope is proportional to the current output at pin 8. If a HIGH level is applied to pin 8, the circuit enters a low-current Standby mode. In this mode, the transmitter is switched off and the receiver is switched to a low current. If dominant bits are detected (differential bus voltage >0.9 V), RXD will be switched to a
PCA82C250
CAN controller interface
Rev. 06 — 25 August 2011 Product data sheet
1. General description
The PCA82C250 is the interface between a CAN protocol controller and the physical bus. The device provides differential transmit capability to the bus and differential receive capability to the CAN controller.
2. Features and benefits
Fully compatible with the “ISO 11898” standard High speed (up to 1 MBd) Bus lines protected against transients in an automotive environment Slope control to reduce Radio Frequency Interference (RFI) Differential receiver with wide common-mode range for high immunity against ElectroMagnetic Interference (EMI) Thermally protected Short-circuit proof to battery and ground Low-current Standby mode An unpowered node does not disturb the bus lines At least 110 nodes can be connected
PCA89C250
All information provided in this document is subject to legal disclaimers.
© NXP B.V. 2011. All rights reserved.
Product data sheet
Rev. 06 — 25 August 2011
© NXP B.V. 2011. All rights reserved.
Product data sheet
Rev. 06 — 25 August 2011
2 of 18
NXP Semiconductors
PCA82C250
CAN controller interface
7.2 Pin description
3. Applications
High-speed automotive applications (up to 1 MBd).
4. Quick reference data
Table 1. Symbol VCC ICC 1/tbit VCAN Vdiff tPD Tamb Quick reference data Parameter supply voltage supply current maximum transmission speed CANH, CANL input/output voltage differential bus voltage propagation delay ambient temperature High-speed mode Standby mode non-return-to-zero Conditions Min 4.5 1 8 1.5 40 Max 5.5 170 +18 3.0 50 +125 Unit V A MBd V V ns C