毕业设计开题报告遥操作机器人的时延控制
移动机器人遥操作系统稳定性分析的开题报告
移动机器人遥操作系统稳定性分析的开题报告一、研究背景移动机器人在工业、服务等领域的应用越来越广泛,其遥操作系统在机器人控制中扮演着重要的角色。
随着机器人应用场景的不断扩展,遥操作系统的稳定性越来越受到重视。
稳定性的提高对于保障机器人任务的顺利完成具有重要意义。
二、研究问题本文主要研究移动机器人遥操作系统的稳定性问题,重点分析以下两个问题:1. 遥操作系统的稳定性对机器人控制的影响。
2. 影响遥操作系统稳定性的因素和解决方案。
三、研究内容本文的研究内容主要包括:1. 遥操作系统的概念以及在机器人控制中的作用。
2. 分析遥操作系统稳定性对机器人控制的影响,包括遥操作延迟、信号丢失等问题。
3. 探究影响遥操作系统稳定性的因素,包括网络带宽、数据传输速度、信号强度等。
4. 基于分析结果,提出提高遥操作系统稳定性的解决方案并进行实验验证。
四、研究意义通过本文的研究,可以更深入地了解移动机器人遥操作系统的稳定性问题,为机器人控制提供更好的支持和保障。
同时,本文研究结果有望为相关行业和企业提供参考,促进机器人应用领域的发展。
五、研究方法本文采用实验研究和文献调研相结合的研究方法。
通过实验验证和数据分析,探究影响遥操作系统稳定性的因素,并提出相关解决方案。
同时,对于已有的文献资料进行梳理和分析,为研究结果提供更加充分的支持。
六、预期结果本文预期通过对移动机器人遥操作系统稳定性的分析和实验研究,可以得到以下预期结果:1. 分析遥操作系统稳定性对机器人控制的影响,探究机器人控制中的遥操作延迟和信号丢失等问题。
2. 探究影响遥操作系统稳定性的因素,包括网络带宽、数据传输速度、信号强度等。
3. 提出提高遥操作系统稳定性的解决方案,并进行实验验证。
4. 通过实验验证,评估提高遥操作系统稳定性的解决方案的有效性。
七、研究进度安排本文的研究进度安排如下:第一阶段(1-2周):文献调研和知识储备,分析遥操作系统的概念以及在机器人控制中的作用。
小型地面移动遥控机器人的设计与实现的开题报告

小型地面移动遥控机器人的设计与实现的开题报告1.研究背景随着科技的不断发展,机器人技术也随之发展。
机器人广泛应用到生产、制造、军事、医疗等领域。
移动机器人在环境监测、清洁、安防等方面也具有广泛的应用前景。
2.研究目的本文旨在设计一款小型地面移动遥控机器人,实现对室内环境的监控和控制,提高室内环境的舒适性和安全性。
该机器人具有简单实用的功能,运动自如,结构精简,操作可靠,可满足一般家庭或办公室的日常使用需求。
3.研究内容本文的主要研究内容包括以下几个方面:(1)机器人结构设计。
在机器人结构设计中,将会采用轮式底盘结构,提高机器人的移动性和适应性。
为了满足机器人的稳定性和操作的便捷性,将设计合适的底盘框架以及机器人的大小。
(2)机器人控制系统设计。
机器人控制系统设计采用基于嵌入式系统的控制方式。
设计和实现可靠、稳定、高效的控制系统,使机器人能够根据用户的要求,自主、准确、快速的移动,并实现控制功能。
(3)机器人传感器选择和设计。
在机器人传感器选择方面,将选择适合室内环境监测的温湿度传感器、气体传感器等常用传感器,结合德州仪器(TI)公司的传感器模块制作出满足要求的传感器模块,并将其集成进机器人控制系统中。
(4)机器人通信模块设计。
机器人通信模块设计将采用无线传输方式,实现机器人与用户终端的无线通信。
通过通信模块,用户可以远程控制机器人,获取室内环境传感器数据,实现安全、舒适的家居环境控制。
4.研究方法本文主要采用实践与理论相结合的方法进行研究。
具体包括:(1)理论分析:对机器人结构、控制系统及相关零部件进行设计分析,确定机器人各部分尺寸和性能要求。
(2)硬件制作:对机器人控制系统、传感器模块、底盘车架以及外壳等部分进行制作。
(3)软件编程:采用C语言进行机器人控制程序编写,实现机器人的运动控制和传感器数据获取控制功能。
(4)实验验证:对机器人进行性能测试和功能测试,验证机器人的性能和功能是否满足研究目标要求。
基于虚拟现实技术的遥操作机器人协调控制系统研究的开题报告

基于虚拟现实技术的遥操作机器人协调控制系统研究的开题报告一、选题背景随着虚拟现实技术的不断发展和应用,其在实现远程遥操作和协作的领域中也得到了广泛的关注和应用。
而机器人技术的发展和应用也越来越广泛,例如在危险环境、灾难现场、医疗领域等地均有广泛的应用。
但是由于操作者与机器人之间的远距离和物理上的障碍,机器人在实际应用中也面临许多挑战,例如操控不灵活、协作不协调、响应不及时等问题。
因此,如何通过虚拟现实技术构建一个协调控制系统,实现遥操作机器人的高效、精准、安全的控制成为了一个热门研究方向。
二、研究意义目前,遥操作机器人系统中的控制和沟通系统已经具备了一定的发展潜力,但仍然存在着各种问题。
尤其是在高风险和复杂环境下,机器人控制更加复杂,需要更高的适应性和智能化。
因此,本研究将主要基于虚拟现实技术,构建一个协调控制系统,通过制定控制策略和建立合适的交互界面,实现在远距离下遥操作机器人的高效、精准、安全的控制。
三、研究目标本研究主要旨在探究虚拟现实技术在遥操作机器人系统的协调控制中的应用,具体研究目标包括:1. 设计一个基于虚拟现实技术的遥操作机器人协调控制系统,并对系统中的各个功能模块进行设计和优化。
2. 建立一套机器人协同控制策略,在保证机器人控制的高效性和精准度的同时,提高机器人的协调性和智能化。
3. 在实验室环境下进行系统性能测试,并对测试结果进行分析和总结,验证该系统在提高遥操作机器人控制精度和效率方面的优势。
四、研究内容1. 虚拟现实技术在遥操作机器人系统中的应用分析2. 遥操作机器人系统的控制框架设计3. 基于虚拟现实技术的机器人控制模块设计4. 机器人协同控制策略设计5. 系统性能测试和结果分析五、研究方法本文采用系统性的研究方法,主要包括系统化和实践性的研究方法。
系统化地研究关于遥操作机器人系统和虚拟现实技术的理论及研究进展,并结合现有的机器人控制策略,提出一套机器人协同控制策略。
实践性研究采用实验室实验,并进行实验数据分析和总结,以验证所提出的机器人协调控制系统的有效性。
遥操作机器人系统时延控制方法研究
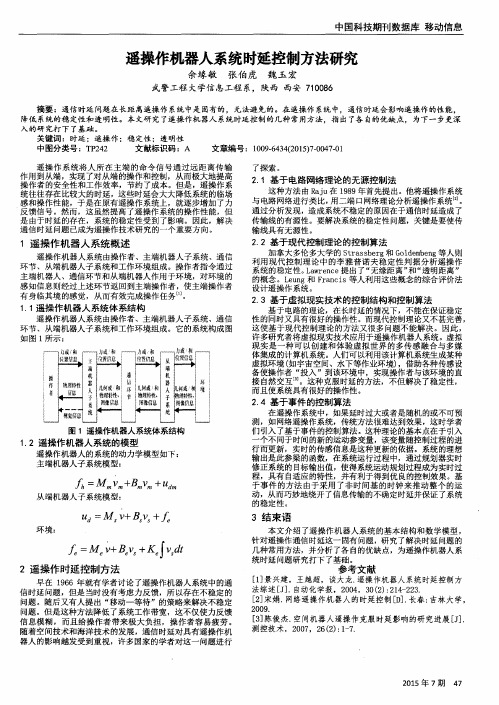
遥操 作系统 将人 所在 主端 的命令 信 号通过 远距 离传 输 作 用到从端 ,实现 了对从端 的操作和 控制,从 而极大地提高 操作者 的安全性和工作 效率,节约 了成本 。但是 ,遥操作系 统往往存在 比较大 的时延 ,这些时延会大 大降低系统 的临场 感 和操作性能 ,于是在原有遥操 作系统上,就逐步增加 了力 反馈 信号 。然而 ,这虽然提高 了遥操作 系统的操作性能 ,但 是 由于时延 的存在 ,系统 的稳 定性受到 了影响 。因此 ,解决 通信 时延 问题 已成为遥操作 技术研究的一个重要方 向。
操作者指令通过主端机器人通信环节和从端机器人作用于环境对环境的感知信息则经过上述环节返回到主端操作者使主端操作者有身临其境的感觉从而有效完成操作任务11遥操作机器人系统体系结构遥操作机器人系统由操作者主端机器人子系统通信环节从端机器人子系统和工作环境组成
中国科技 期刊 数据 库 移动 信息
遥操作机器 入系统时延控制方法研究
3结束语
本文 介绍 了遥操作 机器人系统 的基本结构和数 学模 型 , 针对遥操作通信时延这一 固有 问题 ,研 究了解决时延问题的 几种常用方法 ,并分析 了各 自的优缺点 ,为遥操 作机 器人系 统时延 问题研究打 下了基础 。
f e = Me 1 , + + I v s d t
瑞
} 坚
坚
强 铂
端 — —
M 位 谴 错 船 i
J l = { =
Байду номын сангаас艨 机 抖 精 : 糍特 性 嚣
帆 器
嚣 拦
凡 儿 镌 孵 理 蛾 特 性 和 球 蝌 成 / 和 凡 吧 婀 域 删境 、 带 梅 艘 特镌 、 手 躺 麟% 、 l
遥操作机器人系统的变时延控制

在已有的解决时延问题的众多方案中 , Smith 预估器由于其设计简单 , 调试方便 , 成为近年来解 决遥操作机器人时延问题的热门方法之一 。比较典 型的方法有以下两种 :
4 改进型 Smith 预估器原理
图 1 预测误差图
三条曲线从上到下依次是 RBF 网络 , 自适应 网络 , 某线性预测模型 。由图可见 , RBF NN 的预 测精度最高 , 其预测误差均方根为 01177 1 。在初 始阶段 , 各神经网络的预测输出与实际值大相径 庭 , 以 RBF 为例 , 预测误差甚至可以达到 100 % 。 所以在实际应用中必须考虑系统的鲁棒性问题 。
Teleoperation Control of an Internet2based Robot with Varying Time Delay
LIU Shu2guang , ZHOU Zong2xi , YANG Feng
(School of Electronics and Information , Northwest Polytechnical University , Xiπan 710072 , China)
1) 改进型单 Smith 预估器原理 对于中低精度 遥操 作 机 器 人 , 通 常 对 输 出 信 号 C ( s ) 的 时 延 exp [ - (β+γ) s ]做出预估即可 。即由 RBF NN 预估 出系统的输出信号 C ( s) 的时延值 exp ( - τs) (其真 值 exp [ - (β+ γ) s ]) ,提供给改进型单 Smith 预估 器 ,再由该 Smith 预估器对 C ( s) 的时延进行补偿 。
时延双边遥操作机器人系统控制方法

通信链路带宽有限,需要设计 高效的数据压缩和传输策略。
03
控制方法研究与实现
时延补偿算法
基于预测的时延补偿
通过预测机器人未来的状态,提前发 送控制指令,减少时延对操作的影响 。
自适应时延补偿
根据网络状况实时调整控制指令的发 送频率和参数,以适应不同时延情况 。
双边协人在远程医疗、深海探测、太空任务等更 多领域的应用可能性。
THANK YOU
未来研究方向与目标
时延优化 多机器人协同
智能化升级 应用场景拓展
进一步研究如何降低双边遥操作系统中的时延,提高系统的实 时性和响应速度。
将所提出控制方法应用于多机器人协同遥操作系统,实现更复 杂、高效的任务执行。
引入人工智能和机器学习技术,提升双边遥操作机器人的自主 性和智能化水平,降低对人工操作的依赖。
02 03
工作原理
操作者通过主端机器人发出控制指令,指令经通信网络传输至从端机器 人,从端机器人根据指令完成相应任务,并将任务执行情况经通信网络 反馈至主端机器人和操作者。
时延问题
由于通信网络的传输时延,操作者从从端机器人接收到的反馈信息存在 延迟,影响遥操作的控制精度和稳定性。
研究背景与意义
遥操作机器人的应用
创新点与贡献
新型时延估计算法
提出了一种新型的时延估计算法,可实时、 准确地估计双边遥操作系统中的时延。
自适应控制策略
设计了一种自适应控制策略,可根据时延估计结果 自动调整控制参数,确保系统的稳定性和性能。
多样化实验验证
通过设计多种实验场景和任务,对所提出控 制方法进行了全面、深入的验证,展示了其 在不同应用场景下的潜力。
02
时延双边遥操作机器 人系统基本原理
遥操作机器人理论本科毕业设计
遥操作机器人理论本科毕业设计本文旨在介绍遥操作机器人的原理及其应用,对于机器人技术与自动化控制学科的本科生毕业设计提供一定的参考。
一、遥操作机器人概述机器人技术的发展一直是工业自动化领域的主流趋势。
随着技术的发展,遥操作机器人已经成为了一种极具价值和广泛应用的机器人技术,其能够在危险环境和人不能到达的场所完成工作。
遥操作机器人通过网络将遥控命令传输到机器人控制系统,再由机器人执行命令。
这种技术应用于现场操作、远程救援和环境监测等诸多领域。
二、遥操作机器人的技术原理1.机器人的机械结构机器人的机械结构是指机器人由连杆、接头、驱动器等部件构成的机械结构。
机械结构设计可以影响机器人的功能、精度和能力。
遥操作机器人的机械结构设计需要考虑的问题包括:机器人的尺寸、承载能力、运动自由度和工作空间等。
2.机器人的控制系统机器人的控制系统由三部分构成:感知系统、控制器和执行机构。
感知系统主要由传感器和摄像机等组成,用于实时获取外部环境信息;控制器主要由控制算法、人机界面和通信设备等组成,用于接收、处理、存储和传输遥控命令;执行机构主要由电机、执行器等组成,用于执行机器人的动作。
3.遥控系统遥控系统分为两种,一种是基于硬件平台的遥控器,另一种是基于软件平台的遥控系统。
通常情况下,在远程遥控过程中,遥控器会向底层设备发送命令,然后底层设备根据命令执行相应的动作。
在遥控系统的设计上需要考虑通信协议和安全性等问题。
三、遥操作机器人的应用领域1.危险环境遥操作机器人可以在剧毒化学品仓库、核电站、危险化工厂等环境中完成工作,减少人员伤亡和经济损失。
在危险环境中,遥操作机器人可以完成的任务包括货物装卸、基础维护、清洁和故障诊断等。
2.海洋勘探遥操作机器人可以在深海中进行勘测、观察和采样等工作,获取深海生物、海底矿产和海底景观等丰富信息。
遥操作机器人在海洋勘探中的应用也包括海底管道维护和潜艇救援等。
3.军事领域遥操作机器人可以在军队使用中完成情报收集、矿地侦查、地域勘探和卫星观测等任务。
预测的遥机器人控制系统设计的开题报告
基于预演/预测的遥机器人控制系统设计的开题报告一、研究背景随着机器人技术的不断发展,遥操作机器人已成为工业生产、军事探测、灾害救援等领域中不可或缺的重要工具。
然而,在复杂环境下进行遥操控机器人时,由于操作者与机器人之间的物理距离、网络时延等因素的存在,会导致机器人控制信号的延迟与抖动,进而降低机器人的操控性能和鲁棒性,甚至导致机器人故障或损坏。
因此,如何提高遥机器人的精准度和可靠性已成为当前研究的热点和难点之一。
二、研究内容本研究旨在设计一种基于预演/预测的遥机器人控制系统,以提高机器人的精准度和鲁棒性。
具体研究内容如下:1.利用预演/预测技术对机器人进行建模和仿真,获取机器人的运动轨迹和状态信息;2.设计一种新型的遥机器人控制器,利用预测数据进行控制指令的生成和优化;3.开发机器人与操作者之间的网络通信模块,实现数据传输的实时性和稳定性;4.利用实验测试平台对所设计的遥机器人控制系统进行验证和评估,并比较其与传统遥机器人控制系统的性能差异。
三、研究意义本研究的主要贡献在于:1.提出一种基于预演/预测的遥机器人控制系统设计思路,可为遥机器人控制领域的研究提供新思路;2.设计了一种新型的遥机器人控制器,能够有效改善机器人控制信号的延迟和抖动问题;3.验证了该遥机器人控制系统的性能并与传统遥机器人控制系统进行比较,具有较高的可靠性和精准度,可为工业生产、军事探测、灾害救援等领域中的遥机器人应用提供有力支持。
四、研究方法本研究采用实验研究方法,基于MATLAB/Simulink平台、ROS系统和自主研发的机器人控制平台,开发并验证所设计的遥机器人控制系统。
主要步骤包括:1.对遥机器人进行建模和仿真,获取机器人的运动轨迹和状态信息;2.设计预演/预测控制器,根据机器人状态信息进行控制指令预测和优化;3.设计通信模块,实现数据传输的实时性和稳定性;4.开展实验,对所设计的遥机器人控制系统进行验证和评估,并与传统遥机器人控制系统进行比较。
毕业设计文献阅读报告遥操作机器人的时延控制【范本模板】
毕业设计文献阅读报告遥操作机器人的时延控制日期:2012 年 1 月13日一、毕业设计相关问题的研究背景遥操作机器人系统由操作者、主端机器人子系统、通信环节、从端机器人子系统和工作环境组成.操作者指令通过主端机器人、通信环节和从端机器人作用于环境,对环境的感知信息则经过上述环节返回到主端操作者,使主端操作者有身临其境的感觉,从而有效完成操作任务。
遥操作系统能将人所在的主端的命令和行为传到并作用在远端,实现对远端环境的期望的操作和控制,从而极大地提高操作者的安全性和工作效率,节俭成本,更高效合理地利用人力资源,实现多方协调作业等[1]。
随着遥操作控制技术不断成熟,遥操作机器人系统越来越引起学术界和工业界注意。
由于其应用前景越来越广阔,已经成为当今机器人研究领域的一大热点。
在空间探索、海洋开发、远程作业这些人类难以到达或未知环境中,遥操作系统的必要性不断增强;在高空、深海,核环境、生化环境等这些对人体健康有害的环境中,遥操作系统必不可少;在煤矿、建设、军事战场等恶劣环境中,遥操作系统有很好应用前景.此外,为了实现在这些环境中的复杂作业,被运行的操作任务包括复杂机械和环境的交互作用,要求操作者具有广泛的经验和直接熟练的知识.这些技能在现阶段不容易被做成模型。
因此对于非结构环境和动态时变环境中的复杂作业由于受到资金、技术水平和运作的不确定性等方面的限制[2],尤其是工作在危险环境下的机器人,需要人类的不断介入,对遥控装置的作业进行适度的理解、计划和控制。
基于以上原因,遥操作机器人大有用武之地。
1.1、遥操作机器人的发展概况遥机器人技术的发展历程总体上可分为两个阶段:第一阶段是驱动方式的进步,从机械联动发展到电动伺服,基本形式是双向力反应主从操作,应用领域主要是核工业和太空探索;第二阶段是控制方式的进步,八十年代以后,计算机技术、控制理论、人工智能和通讯科学的飞速发展,引导了计算机辅助遥控的出现,即第二代机器人遥操作技术。
开题报告(网络遥操作机器人的模糊预测控制研究)共34页文档
三、课题研究的内容和方法
一、研究的背景和意义
预测控制系统结构
设定值 s
yd (K j) 参考轨迹
yp (K j)
在线校正
滚动优化
输出 控制
u(K)
受控对象
输出量 y ( K )
模型预测值 ym 、研究的背景和意义
模糊控制作为结合传统的基于规则的专家系
统、模糊集理论和控制理论的成果而诞生,它是 以模糊集合论、模糊语言变量及模糊逻辑推理为 基础的一种计算机控制。
(4)对一些精确度要求较高的操作任务,比如医疗外 科手术、精密仪器制作,常采用机械手代替人手 进行操作,近距离的遥操作是最好的解决办法。
一、研究的背景和意义
模糊预测控制
预测控制是20世纪80年代开始发展起来的一
类新型计算机控制算法。它采用多步预测、滚动 优化和反馈校正等控制策略,因而具有控制效果 好、鲁棒性强、对模型精确性要求不高的优点 预测控制系统组成大致包括:参考轨迹;滚动优 化;预测模型;在线校正等四个部分。 目前提出的预测控制算法主要有:模型算法控制 (MAC),动态矩阵控制(DMC)以及广义预测控制 (GPC)。
课题发展:近年来,基于网络的机器人遥操作 研究取得了很大的进展。通过网络,可以将机器 人遥操作分布到网络远端,延伸了人的感知范围 ,遥操作者可以控制远端的机器人,完成指定的 任务。
不足:遥操作系统固有的时延特性影响着系统 的正常工作,时延较大或变化时,将大大降低系 统的性能,造成不稳定。网络传输时延尤其是大 时延和变时延给遥操作机器人带来的影响,主要 体现在降低系统的稳定性和透明性。
可见,预测控制是解决遥操作者系统时延问 题的有效方法。所以本论文将采用此种方法。
二、课题研究现状和发展趋势
遥操作时延问题控制方法分析

遥操作时延问题控制方法分析作者:孟蒙宁祎来源:《电脑知识与技术》2018年第21期摘要:目前,虽然遥操作已经被广泛应用于许多领域。
但是由于受到当今计算机处理能力,科学技术发展水平等的限制,遥操作中仍然面临着大时延问题。
因此该文主要针对解决大时延问题的方法展开讨论。
总结传统的经典控制方法的同时,引入模糊PD控制方法并进行介绍。
关键词:遥操作;大时延技术;模糊PD控制中图法分类号:TP242 文献标识码:A 文章编号:1009-3044(2018)21-0009-04Abstract: At present, teleoperation has been widely used in many fields. However, due to the limitations of today's computer processing capabilities, scientific and technological development levels, etc., remote operation still faces large delays. Therefore, this paper focuses on the solution to the problem of large delays. At the same time of summarizing the traditional classical control method, the fuzzy PD control method is introduced and introduced.Key words: remote operation; large delay technique; fuzzy PD control1 背景对遥操作系统的研究最早出现于20世纪的40年代,随着科技的不断进步,对遥操作有了进一步的研究。
遥操作机器人存在时延的位置控制研究

2004年1月农业机械学报第35卷第1期遥操作机器人存在时延的位置控制研究*巩明德 赵丁选 宫文斌 黄海东 孙 晓 【摘要】 以电液伺服遥操作主从机器人为控制对象,在系统存在时延的条件下,实现机器人从动机械手位置和姿态行程跟随主手操纵柄位置的控制。
通过建立电液比例阀控制不对称液压缸的数学模型,分析了Smit h 数字控制器的原理和实现方法,并与传统的控制方法进行了对比研究。
针对不同时延进行了仿真试验,仿真结果表明,该方法对电液伺服遥操作机器人的位置控制具有良好的效果和较强的鲁棒性,证明了方法的有效性。
关键词:遥操作机器人 时延 自动控制 临场感中图分类号:T P 242.2文献标识码:APosition Control of Telerobot with Time DelayGong M ing de Zhao Ding xuan Gong W enbin Huang H aidong Sun Xiao(J ilin University )AbstractIn co ndition of tim e delay ,taking an electr on hy draulic serv o master-slave telerobotic sy stem as objectiv e of research w ork,w e implem ented the slave manipulator's tr acking the po sition and po sture of the master one .By a self -developed model of an electron hy draulic pr opo rtio nal valve co ntrolled,dissymm etrical hy draulic cy linder ,the theor y and the realized method to Smith digital co ntroller w ere analy zed and compared w ith the traditional contro l m ethod.T he simulating ex p-er im ents of different time delay w ere carr ied o ut and the result indicated that the method had a pr efer able contr ol effect and obviously r obusticity to electro n hydr aulic serv o telerobotic position co ntrol sy stem.Key words Telerobot,Time delay ,Autom atic co ntro l,T elepresence收稿日期:20020628*国家“863”智能机器人主题资助项目(项目编号:98230103)和教育部“优秀青年教师资助计划”资助项目(2003)巩明德 吉林大学机械科学与工程学院 讲师 博士生,130025 长春市赵丁选 吉林大学机械科学与工程学院 教授 博士生导师宫文斌 吉林大学机械科学与工程学院 副教授黄海东 吉林大学机械科学与工程学院 副教授孙 晓 吉林大学机械科学与工程学院 副教授 引言时延是遥操作机器人控制中普遍存在的问题,由信息传输和系统本身滞后特性产生的影响会给遥操作系统带来严重的问题。
遥操作机器人系统克服时延影响的关键技术

收稿日期:2004204215.作者简介:陈俊杰(19582),男,教授;南京,东南大学仪器科学与工程系(210096).E 2mail :chenjj @基金项目:国家高技术研究发展计划资助项目(2002AA742048);中国博士后基金资助项目(2003034368);江苏省高校科学研究指导性计划资助课题(03K JD510163).遥操作机器人系统克服时延影响的关键技术陈俊杰1,2 黄惟一1(1东南大学仪器科学与工程系,江苏南京210096;2南通工学院自动化系,江苏南通226007)摘要:综述了遥操作机器人系统克服时延影响的关键技术及其最近的研究进展;指出基于虚拟现实技术的遥操作机器人系统是其今后研究和发展的主潮流;认为致力于设计并研究对几何建模误差和动力学建模误差均具有鲁棒性的遥操作机器人系统,有效地解决系统通信时延问题,使其系统稳定,并具有良好的可操作性,才是切实可行办法.关 键 词:遥操作机器人;时延;无源控制;虚拟现实;鲁棒性中图分类号:TP242.2 文献标识码:A 文章编号:167124512(2004)S120187204K ey technologies of overcoming time 2delay infection for telerobot systemChen J unjie Huang WeiyiAbstract :Time 2delay problem is chief problem of desiderating to settle in telepresence telerobot system.In this paper ,the key technologies and its latest researching headway of overcoming time 2delay infection for telerobot system are summarized.It is pointed out that telerobot system based on virtual reality technology is main tideway of researching and developing for telerobot technology for the future.It is considered that designing and researching of telerobot system having robustness for geometry and dynamic modeling error are effective and practical method for settling communication time 2delay problem in the system ,at the same time pledging the stability of the system and possessing well maneuverability.K ey w ords :tele 2robot ;time 2delay ;passive control ;virtual reality ;robustnessChen Junjie Prof.;Dept.of Instrument Sci.&Eng.,Southeast Univ.,Nanjing 210096,China. 将遥操作机器人系统应用于太空活动和深海探测等距离遥远的地方,将大大改善人们对这些领域发展的需求.但远地从机器人与本地操作者之间长达几s 到几10s 不等的通信时延却成为影响系统正常工作的突出问题.这不仅降低了系统的临场感效果,而且造成了系统的不稳定,尤其是在从机器人与环境发生力的交互作用过程中[1,2].为解决此问题,不少研究者作了不懈的努力,采取了多方面的策略,本文对此关键技术作一回顾,并提出相应的对策,以助于今后的研究.1 基于电路网络理论的无源控制法则 1989年,S.Raju 首先提出用二端口网络理论分析遥操作系统的方法[3],将遥操作系统与电路网络进行类比,并且通过分析指出影响系统不稳定性的原因在于通信时延造成了传输线的有源性,使人们认识到使有通信时延的遥控作业系统稳定是可能的,关键是控制远地和本地之间的通信环节,使其具有无源传输线的性能.此后,许多研究者对遥操作机器人系统稳定性的分析大都采用二端口网络的无源性定理,通过设计不同的控制算法,实现无源通信法则来实现系统的稳定.其中主要的是利用散射理论和波变量理论.1.1 散射理论和波变量理论最具代表性的是1989年R.J.Anderson 和M.W.Spong 利用二端口网络的散射理论,提出了一套能保证系统在任何时延下稳定性的无源控第32卷增刊 华 中 科 技 大 学 学 报(自然科学版) Vol.32 Sup.2004年 10月 J.Huazhong Univ.of Sci.&Tech.(Nature Science Edition ) Oct. 2004制算法[1]以及G.Niemeyer和J.J.Slotine在1991年提出波变量的概念,利用能量流理论来解决传输线的有源性,从而保证系统在任何时延下的稳定性而提出的控制算法[4],两种控制算法本质上是类似的.实际上,日本的Y.Y okokohji等亦利用基于散射理论和波变量理论的二端口网络的无源性对系统进行分析和设计,并注重对系统控制策略和系统性能进行深入地研究,以求解决通信时延问题[5].S.Tachi对临场感的完美形式作了总结说明,并构造了实验系统进行了验证[6].1.2 Hannaford的实验研究B.Hannaford于1993年构造了一个实验系统,对采用无源控制法则的遥操作机器人系统在通信时延下的运行性能进行了实验研究[7].结果表明,无源理论能有效地保证遥操作机器人系统在任何时延下的稳定性.但是,这种稳定性的获得是以降低系统的运行性能,即操作者在系统中的临场感知能力为代价的,其结果是随着通信时延的增大,机器人的位置跟踪误差和力反馈信息的稳态误差增大,完成作业的时间加长.操作者难以正确地感知环境,极易发生误操作.因此B.Han2 naford指出今后的研究应同时考虑稳定性和运行性能两个方面来解决通信时延的影响,只有操作者正确的感知,才能有操作者正确的决策,稳定性才有意义.2 基于现代控制理论的控制算法加拿大多伦多大学的Y.Strassberg和A.A.G oldenberg等人则利用现代控制理论中的李亚普诺夫稳定性判据分析临场感系统的稳定性条件[8].D. wrence针对稳定性和临场感特性在时延下的不协调,提出了“无源距离(passivity distance)”和“透明距离(transparency distance)”的概念,用以指导临场感系统的设计[9].G.M.H. Leung和B. A.Francis等人利用基于“无源距离”和“透明距离”的综合评价法(μ2synthesis)设计临场感系统的结构,并利用H∞最优控制理论指导时延下临场感系统中控制器的设计[10].基于现代控制理论的系统设计方法以解决通信时延是具有潜在生命力的方法,但由于目前现代控制理论的不完善和其系统实现上的困难等原因,它对解决遥操作机器人系统的通信时延问题存在着许多实用性困难.3 基于虚拟现实技术的控制结构和控制算法 以上两个方向上所提出的方法是基于电路的网络理论和现代控制理论,通过设计不同的控制算法来克服时延保证系统稳定的.实际上,许多的理论分析和实验结果,特别是Hannaford的实验研究证实,基于电路网络理论的无源通信法则所实现的控制算法对解决短时延问题具有较好的效果,而在长时延的情况下,要实现在保证系统稳定时又同时具有良好的可操作性则显得无能为力,并且由于现代控制理论的不完善和其系统实现上的困难等原因,基于现代控制理论所提出的各种控制算法亦未能较好地解决系统通信时延问题.因此,许多研究者将注意力转向了虚拟现实技术,提出将虚拟现实技术用于遥操作机器人系统克服通信时延以确保系统的稳定性和可操作性得以同时实现.在此值得强调的是,基于虚拟现实技术的遥操作机器人系统将是今后研究和发展的主流.3.1 模型修正法模型修正法是虚拟现实技术用于临场感遥操作机器人系统的主要方案,到目前为止,不少研究者仍在这个方案上给予很大的关注.1984年,G.Noyes和T.B.Sheridan设计了用于遥操作的第一个视觉预测显示系统.在该系统中用机械手的计算机仿真模型叠加在经时延后反馈的机械手视频图像上,仿真模型和操作者之间实时交互,用以预测远处环境中机械手的运动.实验证明,该方法可以极大地提高系统的操作性能[11].1991年,W.S.K im和A.K.Bejczy等人在美国NASA的J PL实验室设计了“力觉临场感遥控机器人仿真系统”,通过模拟预测远地现场环境和机器人的运动提供给操作者实时的视觉反馈和力觉反馈[12].同年,F.S.Schebor和J.L.Tur2 ney在美国NASA的KMS实验室设计了“遥控机器人环境模拟器(G L ETS)”.G L ETS使操作者置身于一个实时的、交互式的、模拟的和视觉可调的远距遥控机器人工作现场的虚拟环境中[13].1992年,T.K ototu等人基于A.K.Bejczy在1990年提出的“幻影机器人(the phantom robot)”的思想,给虚拟从手加入了力反馈.从而使控制稳定,而且从手的运动比仅靠图形显示判断接触力时快了三倍[14].而德国针对空间机器人研究建立了实验装置RO TEX,该装置具有远地环境的三维计算机预测能力和立体显示,并指出预测显示技术881 华 中 科 技 大 学 学 报(自然科学版) 第32卷是目前解决大的传输时延问题的强有力的手段,同时特别强调了虚拟环境的建模和修正[15].在以上所提出的诸多方法中,都需要建立机器人及其环境的精确的几何模型和动力学模型,才能确保系统的稳定性和良好的可操作性.3.2 “虚拟夹具”法针对非结构化环境无法精确建模的问题, 1993年L.Rosenberg提出采用“虚拟夹具(virtual fixtures)”的方法,不需要对环境建立虚拟模型就可以解决遥操作系统的时延及力反馈问题[16].这些“虚拟夹具”实际上是一些在主端虚拟世界中生成的加罩在虚拟工作空间端面上的抽象的传感数据,并且它们仅与操作者(人)交互.它们可以与实际工作现场中的物体一样占居相同的物理空间而没有几何和物理上的约束.后来,L.Rosenberg又把“虚拟夹具”用于提高“插销入孔”遥控任务的性能,结果表明,当不使用“虚拟夹具”且时延是450 ms时,运动时间增加45%,而“虚拟夹具”的使用却提供了有效的控制(定位),使其定位误差减少到大约3%[17].3.3 建模误差的鲁棒性法模型修正法需要建立机器人及其环境的精确的几何模型和动力学模型,才能确保系统的稳定性和良好的可操作性,其方法费时、费力,而且难度较大.而“虚拟夹具”法的数据计算量、实时性和适用性等方面都存在着难以解决的问题.因此, 1996~1997年间,Y.Tsumaki等人设计对几何建模误差和动力学建模误差均具有鲁棒性的控制结构和控制算法的初步框架[18].2000年,T.Hi2 rai等人又提出通过建立远地工作地点的基于传感器的运动规划,操作者可选择合适的虚拟从手的运动序列,通过主端操作器操纵从端机械手,其控制方法对建模误差具有较强的鲁棒性[19].2001年,M.Zefran等人又将虚拟现实遥操作机器人系统看成是混杂控制系统,并初步提出了其模型框架,分析了其稳定性.其目的是为今后设计其鲁棒性系统提供一般的、基本的思路[20].4 展望遥操作机器人系统中的时延问题是目前亟需解决的首要问题.自从80年代由于空间技术和海洋技术发展的需求而得以重视以来,人们从三个不同的思路出发加以研究解决:基于电路网络理论的无源控制法则、基于现代控制理论的控制算法和基于虚拟现实技术的控制结构和控制策略.但笔者认为,从目前及今后较长一段时间的技术发展水平看,利用虚拟现实技术,设计出对几何建模误差和动力学建模误差均具有鲁棒性的系统控制结构和控制算法的遥操作机器人系统,才是有效地解决系统通信时延问题,使其系统稳定,并具有良好的可操作性的切实可行的办法.可以预计:采用这种方案,遥操作机器人系统的时延问题将会在不太长的时间内得以有效地解决,所实现的虚拟现实遥操作机器人系统,将极大地改善遥操作机器人的作业能力,人们可以将自己的智慧同机器人的适应能力相结合而完成复杂的作业任务.参考文献[1]Anderson R J,S pong M W.Bilateral control of teleop2erators with time delay.IEEE Trans.on Automatic Control,1989,34(5):494~503[2]Bejczy A K,K im W S,Venema S C.The phantomrobot:predictive displays for teleoperation with time de2 lay.Proc.of the IEEE Int.Conf.on Rob.and Auto., Piscalway;IEEE Inc.,1990.546~551[3]Raju G.Design issue in22port networks models of bilat2eral remote manipulation.IEEE Trans.on Auto.Con2 trol,1989,34(3):1316~1321[4]Niemeyer G,Slotine J J.Stable adaptive teleoperation.IEEE J.of Oceanic Engineering,1991,16(1):152~163[5]Y okokohji Y,Y oshikawa T.Analysis of maneuverabili2ty and stability for master2slave system.Proc.of USA2 Japan Symposium on Flexible Automation,Boston: Compulatural Publications,1988.433~440[6]Tachi S,Arai H,Maeda T.Tele2existence master2slavesystem for remote manipulation.Proc.of29th Conf.on Decision and Control,Massachusetts:Addison2wesley Publishing Company,1990.85~90[7]Hannaford B.Performance testing of passive communi2cation and control in teleoperation with time delay.Proc.of the IEEE Int.Conf.on Rob.And Auto., Piscalauay:IEEE,Inc.,1993.776~783[8]Strassberg Y,G oldenberg A A,Mills T K.A new con2trol scheme for bilateral teleoperating system:Lyapunov stability analysis.Proc.of the IEEE Int.Conf.on Rob.And Auto.,Piscalaway:IEEE,Inc.,1992.837~842[9]Lawrence D A.Stability and transparency in bilateralteleoperation.IEEE Trans.on Rob.and Auto.,1993, 9(5):624~637[10]Leung G M H,Francis B A.Bilateral controller forteleoperators with time delay viaμ2synthesis.IEEE981增刊 陈俊杰等:遥操作机器人系统克服时延影响的关键技术 Trans.on Rob.and Auto.,1995,11(2):105~116 [11]Sheridan T B.S pace teleoperation through time delay:review and prognosis.IEEE Trans.on Rob.and Au2to.,1993,9(5):959~606[12]K im W S,Bejczy A K.Graphic displays for operatoraid in telemanipulation.Proc.of IEEE Int.Conf.onRob.and Auto.,Piscalaway;IEEE,Inc.,1991.1059~1067[13]Schebor F S,Turney J L.Realistic and consistenttelerobotic simulation.Proc.of IEEE Int.Conf.onRob.and Auto.,Piscalaway;IEEE,Inc.,1991.889~894[14]K otoku T,K omoriya K,et al.A torce dis play for vir2tual environments and its evaluation.Proc.of IEEEInt.Workshop on Robot and Human Communication,Piscalaway;IEEE,Inc.,1992.246~251[15]Hirzinger G,Heindl J,et al.Multisonsory shared au2tonomy—a key issue in the s pace robot technology ex2 periment RO TEX.Proc.of IEEE/RS J Int.Conf.onIntelligent Robots and Systems,Piscalaway;IEEE,Inc.,1992.221~230[16]Rosenberg L.The use of virtual fixtures to enhancetelemanipulation with time delay.Proc.ASMEWAM,Massachusetts:Addison2Wesley PiblischingCompany.,1993.29~36[17]Rosenberg L.virtual fixtures:perceptual overlays en2hance operator performance in telepresence tasks:[Ph.D.]Thesis,Stanford Univ.,Stanford,CA,p.214,Aug.,1994(see also http:∥WWW.SUL./depts/eng/theses.H2tml)[18]Tsumaki Y,Uchiyama M.A model2based space tele2operation system with robustness against modeling er2 rors.Proc.of IEEE Int.Conf.on Rob.and Auto.,Piscalaway:IEEE,Inc.,1997.1594~1599 [19]Hirai T,Ikuta T,Noborio H.A teleo peration systembased on generation of artificial force and sensor2basedmotion2planning.Proc.of the IEEE/RS J Int.Conf.on Intelligent Robots and Systems,Piscalaway:IEEE,Inc.,2000.1179~1186[20]K ammermeier P,Buss M,et al.Multi2model sensoryfeedback based on a mathematical model of human per2 ception.Proc.of the IEEE/RS J Int.Conf.on Intelli2 gent Robots and Systems,Piscalaway:IEEE,Inc.,1999.1537~1542091 华 中 科 技 大 学 学 报(自然科学版) 第32卷。
遥操作机器人理论本科毕业设计

摘要遥操作机器人理论本科毕业设计摘要随着探索领域的不断拓展,人类对机器人的需求越来越大。
当需要在一些人类难以到达或者危险的环境中完成复杂任务时,普通机器人往往难以胜任,这时遥操作机器人就应运而生。
遥操作机器人是机器人学与通信技术、控制理论等融合的产物。
它将人类的指导和机器自身的智能相结合,有效拓展了人类的活动空间,延伸了人类的能力,有广泛的应用前景。
本文主要研究遥操作机器人的时延控制问题。
首先,简要介绍了遥操作机器人的发展和现状,介绍了二端口网络理论,并为遥操作机器人建立了二端口网络模型。
然后,基于遥操作机器人的二端口网络模型,分析了时延对遥操作机器人控制效果的不利影响,以及产生这些不利影响的原因。
接着,运用无源控制理论中的波变量方法,设计遥操作机器人系统的控制算法。
最后,运用Matlab软件对控制算法进行仿真模拟。
关键词:机器人遥操作二端口无源控制ABSTRACTABSTRACTWith the exploration of the area continues to expand, the human demand on the robot is more and more big. When the need in some human inaccessible or dangerous environment to perform complex tasks, often difficult to do ordinary robot, teleoperation will emerge as the times require. Teleoperation is a fusion of robotics, communication technology and control theory. Teleoperation which combines human supervisor and machine intelligence effectively expands the space of human activity and extends human capability, so it has extensive application prospects.This paper mainly studies the control of time delay teleoperation. Firstly, this paper briefly describes the development status of the teleoperation and two-port network theory and builds a two-port network model for teleoperation. Secondly, based on the two-port network model of teleoperation, an analysis which is related to the adverse effect of the time delay in teleoperation control and the causes of these adverse effects is made. What's more, using wave variable method of the passive control theory, control algorithm off teleoperation is designed. Finally, Matlab is used to simulate the control algorithm.Keywords: robotics teleoperation two-port network passive control目录第一章绪论 (1)1.1 遥操作机器人的意义 (1)1.2 遥操作机器人的发展 (2)1.3 遥操作机器人的系统结构模型 (3)1.3.1 NASREM系统结构模型 (4)1.3.2 基于Agent的系统结构模型 (5)1.3.3 混杂系统结构模型 (5)1.3.4 采样控制模型 (6)1.4 遥操作机器人的数学模型 (7)1.5 遥操作机器人的时延控制 (8)1.5.1 基于电路理论的无源控制方法 (8)1.5.2 基于现代控制理论的方法 (8)1.5.3 基于虚拟现实技术的控制方法 (9)1.5.4 基于事件的控制方法 (9)1.6 本文主要研究内容 (9)第二章遥操作机器人的动力学模型和数学模型 (11)2.1 二端口网络理论 (11)2.2 遥操作机器人的体系结构 (11)2.3 遥操作机器人系统等效成二端口网络 (13)2.4 本章小结 (15)第三章遥操作机器人的稳定性分析与设计 (16)3.1 无源性理论 (16)3.2 遥操作机器人的稳定性分析 (18)3.3 基于波变量的矫正方法 (19)3.4 阻抗匹配 (21)3.5 透明性问题 (22)3.5.1 透明性的定义 (22)3.5.2 时延对透明性的影响 (23)3.6 本章小结 (25)第四章遥操作机器人的总体控制设计 (26)4.1 遥操作机器人的控制器设计 (26)4.2 遥操作机器人的总体控制结构 (28)4.3 本章小结 (29)第五章系统仿真实验 (30)5.1 对波变量方法的验证 (30)5.2 更加真实的遥操作机器人仿真模型 (31)5.3 消除了波反射的遥操作机器人仿真模型 (33)总结 (36)参考文献 (37)致谢.................................. 错误!未定义书签。
主从机器人无线遥操作系统及其应用研究的开题报告

主从机器人无线遥操作系统及其应用研究的开题报告一、选题背景近年来,由于机器人技术的迅速发展和广泛应用,无人机、无人车、无人船等机器人设备在各个领域被大量使用,特别是在军事、石油、地质、环保、测量等领域占有显著的地位。
而且,由于机器人本身的特殊性,很多时候是需要随时进行远程遥控的。
为了满足人们的需求,无线遥操作系统被应用于机器人的遥控操作中,它可以使机器人与遥控端无需通过有线连接。
广泛应用的无线遥操作系统,被用于机器人的遥控控制中,其系统性、网络性和可靠性等方面均需得到更深入的研究。
二、研究内容1、主从机器人无线遥操作系统的研究。
本研究将侧重于对主从机器人的无线联接机制、数据传输机制、运动控制机制等方面的研究,包括通信协议选择、数据传输速率、遥控响应时间等方面的研究。
2、无线遥操作系统的应用研究。
本研究将探讨无线遥操作系统在机器人领域的具体应用,包括军事、石油、地质、环保、测量等各个领域。
三、研究方法1、文献研究法。
通过文献调研和整理已有的与主从机器人无线遥操作系统及其应用领域相关的文献资料,对现状进行分析和总结,并把握研究重点和方向,为准确研究进行了解和探寻。
2、系统设计法。
通过对主从机器人无线遥操作系统的研究,总结其特征和性能指标,根据设计原则和性能要求,开展无线遥控系统的设计,包括数据传输速率、无线通信技术选择、运动控制等方面。
3、实验研究法。
实验设计将主要针对主从机器人的无线联接机制、数据传输机制、运动控制机制等方面进行实验研究,并进行问题分析和解决,以保证无线遥控系统的顺畅运行。
四、研究意义1、针对机器人的遥控控制需求,研究无线遥操作系统,提高机器人的遥控操作性能和效率,满足各个领域对于机器人遥控的需求。
2、研究无线遥操作系统的应用,为机器人的推广应用提供技术支持和智慧支持,促进机器人技术的发展和创新。
3、建立国家机器人技术创新平台,促进国家军民融合,为国家的经济建设和军事战略部署提供科技支撑和智慧支撑。
基于虚拟环境的遥操作系统计算时延研究的开题报告

基于虚拟环境的遥操作系统计算时延研究的开题报告一、选题背景及意义随着技术的不断发展,控制系统的可靠性要求不断提高,尤其在遥操作系统中,对计算时延的需求越来越高。
计算时延是指控制系统完成相关任务所需的时间间隔,包括了信号传输、数据处理、控制指令执行等等多个环节。
在遥操作中,时延的大小直接影响到控制系统的实时性和稳定性,并且需要承受一定的跨地域的网络传输的干扰。
因此,针对遥操作系统计算时延的研究意义重大。
目前,大多数遥操作系统采用的是物理环境下的计算方式。
由于物理环境的不确定性、噪声、干扰等等因素,计算时延的大小可能会受到严重影响。
与之相比,基于虚拟环境的遥操作系统具有很好的计算性能和稳定性,对于计算时延的研究有着很好的前景。
本课题主要研究针对基于虚拟环境的遥操作系统中的计算时延进行研究,旨在提高控制系统的实时性和稳定性,进一步推动遥操作技术的发展。
二、研究内容1. 基于虚拟环境的遥操作系统概述:介绍基于虚拟环境的遥操作系统的基本概念、原理及其特点;2. 计算时延的测量方法:研究计算时延的测量方法,评估不同方法的优缺点,并选择合适的测量方法用于实验;3. 计算时延的影响因素:研究计算时延的影响因素,包括虚拟环境的性能、网络传输的延时等因素;4. 计算时延的实验研究:在虚拟环境下,对不同参数进行实验,包括虚拟机的数量、虚拟机之间的网络带宽、延时等参数,研究这些参数对于计算时延的影响,并分析出具体的结果;5. 计算时延的优化策略:根据实验结果,提出针对计算时延的优化策略,比如增加虚拟机数量、增加带宽等,进一步提高控制系统的实时性和稳定性。
三、研究方法1. 文献调研:通过查阅相关文献,对于虚拟环境下控制系统的研究现状进行调研,了解已有的研究结果,并为实验设计提供参考;2. 实验方法:采用仿真实验的方式,以基于虚拟环境的遥操作系统为研究对象,通过测试不同参数的组合对计算时延的影响,确定影响计算时延的重要因素以及优化策略;3. 数据分析与建模:收集实验数据后,采用数学分析和建模等方法,对实验结果进行分析、总结和优化。
网络遥操作若干控制问题研究的开题报告
网络遥操作若干控制问题研究的开题报告一、研究背景与意义随着社会信息化水平的提高,越来越多的控制系统实现了网络远程控制。
网络遥操作技术作为一种先进的远程监测控制手段,已经被广泛应用于各种复杂的控制系统中。
但由于网络带宽、通信延迟、网络安全等因素的影响,网络遥操作控制系统面临着种种挑战和问题。
如何有效地对控制系统进行网络遥操作,保证控制系统的稳定性和安全性,是本课题的研究内容。
二、研究内容及目标本课题旨在研究网络遥操作控制系统中的若干关键问题,包括:1. 网络遥操作控制系统的建模分析;2. 网络遥操作控制系统中控制效果分析;3. 网络遥操作控制系统中性能评估分析;4. 网络遥操作控制系统中网络安全问题研究;5. 网络遥操作控制系统中可靠性问题研究。
本课题旨在达到以下几个目标:1. 掌握网络遥操作控制系统的原理和基本方法;2. 研究网络遥操作控制系统在不同网络环境下的控制效果;3. 分析网络遥操作控制系统的网络安全问题,并提出相应的解决方案;4. 分析网络遥操作控制系统的可靠性问题,并提出相应的解决方案。
三、研究方法和步骤1. 文献调研:通过对国内外相关文献的阅读,了解网络遥操作控制系统的研究现状和发展趋势。
2. 系统建模:将网络遥操作控制系统建立相应的数学模型。
3. 控制效果分析:将建立的数学模型应用于实际控制系统中,并分析不同网络环境下控制效果的差异。
4. 性能评估分析:对网络遥操作控制系统的性能进行评估,提高控制系统的性能。
5. 网络安全问题研究:分析网络遥操作控制系统的网络安全问题,提出相应的解决方案。
6. 可靠性问题研究:分析网络遥操作控制系统的可靠性问题,提出相应的解决方案。
7. 实验验证:通过实验验证,验证所提出的解决方案的有效性和可行性。
四、预期研究成果1. 研究网络遥操作控制系统中的若干关键问题;2. 提出网络遥操作控制系统中的若干控制策略;3. 提出网络遥操作控制系统中的若干解决方案;4. 验证所提出的控制策略和解决方案的有效性和可行性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业设计开题报告遥操作机器人的时延控制日期:2012年1月13日一、课题研究背景1.1、遥操作机器人系统概述遥操作机器人系统由操作者、主端机器人子系统、通信环节、从端机器人子系统和工作环境组成。
操作者指令通过主端机器人、通信环节和从端机器人作用于环境,对环境的感知信息则经过上述环节返回到主端操作者,使主端操作者有身临其境的感觉,从而有效完成操作任务。
遥操作系统能将人所在的主端的命令和行为传到并作用在远端,实现对远端环境的期望的操作和控制,从而极大地提高操作者的安全性和工作效率,节俭成本,更高效合理地利用人力资源,实现多方协调作业等[1]。
最早的遥操作系统用于地面平台对太空设备的控制上[2],由于电磁波传播速度及信号收发处理方面等的局限性,遥操作系统往往存在比较大的时延。
这些时延会给系统的知觉感受和操作性能带来极大影响[3],于是在原有遥操作系统上,就逐步增加了力反馈信号。
然而,这虽然提高了遥操作系统的操作性能,但是由于时延的存在,系统的稳定性受到了影响。
因此,控制器的设计除了要保证系统的稳定性外,还要克服时延的影响。
1.2、遥操作机器人的研究意义遥操作不同于遥控,它在人控制远方机器人的同时,又必须得到机器人在“知觉”上的反馈。
实现机器人在“知觉”上反馈的办法,就是使用临场感技术。
临场感技术是以人为中心,通过各种传感器将远地机器人与环境的交互信息(包括视觉、力觉、触觉、听觉、运动觉等)实时地反馈到本地操作者(人)处,生成和远地环境一致的虚拟环境,使操作者产生身临其境的感受,从而实现对机器人带感觉的控制,完成作业任务[4]。
事实上,在应用了临场感技术的遥操作机器人系统中,对于操作者来说,意味着他将“沉浸”在远地环境中。
这样,遥操作机器人系统就可以代替人类完成远程环境和危险环境下的任务,保护人类的安全。
在空间探索中,它可以完成卫星修理,空间站维护,月球、火星等行星的勘探等任务;在海洋开发中,它可以完成海洋资源调查,深海打捞,水下电缆修理,海洋钻井平台维护,海底考古等任务;在军事领域,它可以完成战场调查、防化、扫雷、救护等任务;在民用领域,它可以完成核电站维修、远程医疗、远程教育、远程科学实验等任务。
总之,遥操作机器人的应用使人摆脱了传统操作者的角色,由直接操作变成了遥操作。
二、国内外研究状况2.1、遥操作机器人发展历程上个世纪四十年代,Fermi领导他的团队在 Argonne 国家实验室进行核试验,由于核材料放射性强,对人体危害大,为解决核废料的处理问题。
1948 年,世界第一个遥操作系统由 Goertz 在国家实验室研制成功。
1954 年,Goertz 设计了第一台电子程序可编的工业机器人是一个带伺服反馈的机电遥操作系统[5],由操作者对车辆进行远程控制,操作性能得到很大改善。
后来从动力学和运动学角度设计的双向控制方法的引入,使得设计适合于人手使用的操纵杆成为现实,大大减轻了操作者的负担。
20 世纪 80 年代对智能机器人的研究表明,由于机构、控制、人工智能和传感技术水平的限制,在短时间内尚难研制出能在未知或复杂环境下工作的全自主式智能机器人。
90 年代以来,Internet 得到了迅速发展,已经联系超过 160 个国家和地区,4万多个子网、500多万台电脑主机,直接的用户超过 4000 万,成为世界上信息资源最丰富的电脑公共网。
将Internt 技术被引入遥操作机器人领域,将其作为遥操作系统的通讯环节,由于 Internet 引入系统会产生变化的随机的时延会影响系统的稳定性和可操作性。
因此,由Internet引起的变化的、随机的时延问题成为学者研究基于网络的遥操作机器人必须攻克的一个难题[6]。
2.2、时延控制方法的研究现状早在1966年就有学者讨论了遥操作机器人系统中的通信时延问题,但是当时没有考虑力反馈,所以存在不稳定的问题[7]。
随后又有人提出“移动—等待”的策略来解决不稳定问题。
但是这种方法降低了系统工作带宽,这不仅使力反馈信息模糊,而且给操作者带来极大负担,操作者容易疲劳。
随着空间技术和海洋技术的发展,通信时延对具有遥操作机器人的影响越发受到重视[8]。
许多国家的学者对这一问题进行了探索,目前主要形成了以下几种方法:2.2.1、基于电路网络理论的无源控制法:这种方法由Raju在1989年首先提出。
他将遥操作系统与电路网络进行类比,用二端口网络理论分析遥操作系统[9]。
通过分析发现,造成系统不稳定的原因在于通信时延造成了传输线的有源性。
要解决系统的稳定性问题,关键是要使传输线具有无源性。
2.2.2、基于现代控制理论的控制算法加拿大多伦多大学的Strassberg和Goldembeng等人则利用现代控制理论中的李雅普诺夫稳定性判据分析遥操作系统的稳定性[10]。
Lawrence提出了“无缘距离”和“透明距离”的概念。
Leung和Francis等人利用这些概念的综合评价法设计遥操作系统[11]。
2.2.3、基于虚拟现实技术的控制结构和控制算法基于电路的理论,在长时延的情况下,不能在保证稳定性的同时又具有很好的操作性。
而现代控制理论又不甚完善,这使基于现代控制理论的方法又很多问题不能解决。
因此,许多研究者将虚拟现实技术应用于遥操作机器人系统。
虚拟现实是一种可以创建和体验虚拟世界的多传感融合与多媒体集成的计算机系统。
人们可以利用该计算机系统生成某种虚拟环境(如宇宙空间、水下等作业环境), 借助各种传感设备使操作者“投入”到该环境中, 实现操作者与该环境的直接自然交互[12]。
这种克服时延的方法,不但解决了稳定性,而且使系统具有很好的操作性。
2.2.4、基于事件的控制算法在遥操作系统中,如果延时过大或者是随机的或不可预测,如网络遥操作系统,传统方法很难达到效果,这时学者们引入了基于事件的控制算法[13]。
这种理论的基本点在于引入一个不同于时间的新的运动参变量,该变量随控制过程的进行而更新,实时的传感信息是这种更新的依据。
系统的理想输出是此参梁的函数,在系统运行过程中,通过规划器实时修正系统的目标输出值,使得系统运动规划过程成为实时过程,具有自适应的特性,并有利于得到优良的控制效果[14]。
基于事件的方法由于采用了非时间基的时钟来推动整个的运动,从而巧妙地绕开了信息传输的不确定时延并保证了系统的稳定性。
三、研究内容3.1、课题研究目的本课题将研究遥操作机器人时延控制的特点,提出系统设计原则和方案;并以此为基础,设计一种遥操作机器人时延控制算法,运用仿真软件搭建系统模型,进行系统仿真实验。
3.2、遥操作机器人系统体系结构遥操作机器人系统由操作者、主端机器人子系统、通信环节、从端机器人子系统和工作环境组成。
它的系统构成图如图1所示:图1:遥操作机器人系统体系结构3.3、遥操作机器人系统的模型遥操作机器人的系统的动力学模型如下:(1)主端机器人子系统模型:dm m m m m h u v B v M f ++=.(2)从端机器人子系统模型:e s s s df v B v M u ++=.(3)环境:dt v K v B v M f s e s e e e ⎰++=.3.4、基于二端口网络的控制方案将遥操作系统与电路系统进行类比,用二端口网络的方法研究遥操作系统。
只要保证传输线的无源性,就可以保证系统的稳定性。
3.4.1、二端口网络如果有两对端子满足端口条件,即对于所有时间t ,从端子1流入方框的电流等于从端子1' 流出的电流;同时,从端子2流入方框的电流等于从端子2' 流出的电流,这种电路称为二端口网络。
用二端口概念分析电路时,仅对二端口处的电流、电压之间的关系感兴趣,这种相互关系可以通过一些参数表示,而这些参数只决定于构成二端口本身的元件及他们的连接方式。
一旦确定表征这个二端口的参数后,当一个端口的电压、电流发生变化,要找出另外一个端口上的电压、电流就比较容易了[15]。
图2:二端口网络3.4.2、二端口网络的有源性和无源性无源性:对一个N 端口网络,若在任何时刻t 0和任何t ≥ t 0时刻,对于所有容许的信号 V (t )和 i (t )来说,储存和供应到该网络的能量,在所有的时间t 均为非负值,即:0)()(')()(00≥+=⎰dx x i x V t E t E tt 则该网络就是无源网络。
无源网络是任何时候都不能释放出能量的。
有源性:一个N 端口网络,当且仅当对于某一激励,某一时刻初始时间t 0和任何t 0 ≥ t 时刻的某一时间有下列关系,即:0)()(')()(00<+=⎰dx x i x V t E t E t t则该网络就是有源网络。
有源网络可以释放出能量。
四、毕业设计总体进度安排2011年11月 查阅相关文献资料及学习相关知识。
2011年12月 撰写开题报告、文献阅读报告。
2012年3-4月 设计整个遥操作机器人时延控制器的算法。
2012年5月 利用matlab 软件进行系统仿真模拟。
2012年6月 撰写毕业论文。
参考文献:[1] 景兴建, 王越超, 谈大龙. 遥操作机器人系统时延控制方法综述[ J]. 自动化学报,2004,30(2): 214-223.[2]Shemdan T B. Space teleoperation through time delay: Review and prognosis. IEEE Transactions on Robotics and Automation , 1993.9(5):592~606[3]Ferrell W R. Remote manipulation with transmission delay . IEEE Transactions on Human Factors in Electronics . 1965,HFE-6(1)[4]刘寒冰赵丁选. 临场感遥操作机器人综述[J]. 技术应用,2004,1:42-45[5]Hashtrudi-Zaad, Design、implementation and evaluation of stable bilateral tele- operation control architectures for enhanced tele-presence. Ph. D dissertation. The University of British Columbia. 2000.[6]宋娟. 网络遥操作机器人的时延控制:[硕士论文],长春:吉林大学,2009[7]FerrelWR. Delayed force feedback[ J]. IEEE Trans. on Human Facors, 1966, 9(5): 449-454.[8]陈俊杰. 空间机器人遥操作克服时延影响的研究进展[J]. 测控技术,2007,26(2):1-7[9]Raju G. Design issue in 2-port networks models of bilateral remote manipulation[J]. IEEE Trans on Auto-Control , 1989,34(3):1316-1321[10]Strassbrg Y , Goldenberg A A, Mills T K A new control scheme for bilateral teleoperating system: lyapunov stability analysis[A]. Proc of the IEEE Int Conf on Rob and Auto [C]. Nice, France, 1992: 837-842[11]Lawrence DA. Stability and transparency in bilateral teleoperation[J]. IEEE Trans. on Rob. and Auto. , 1993, 9(5): 624-637.[12]李华忠,梁永生,洪炳熔. 基于虚拟现实的无时延感空间机器人遥操作研究[J]. 计算机应用研究, 2008,11(25):3404-3407[13]Elhagg I, Xi Ning, Liu Yun Hui. Real-time control of internet based teleoperation with force reflection. In:Proceedings of the IEEE International Conference on Robotics and Automation. San Francisco, CA:2000,3284-3289[14]Xi N, Tarn T J. Action synchronization and control of internet based telerobotic systems. In:Proceedings of the IEEE International Conference on Robotics and Automation. Detroit, Michigan:1999.2964-2969[15]邱关源,罗先觉. 电路(第五版)高等教育出版社,2006,5(2009重印):418-419。