ch11-模糊系统
高通滤波器
ILPF空域上冲激响应卷积产生两个现象: 一是边缘渐变部分的对比度; 二是边缘部分加边(ringing)。 其原因是冲激响应函数的多个过零点。
1 低通滤波器法
f(x) h(x) g(x)
1 低通滤波器法
3)巴特沃思低通滤波器(BLPF)
n阶巴特沃思(Butterworth)滤波器
4 同态滤波
4 同态滤波
分析
fi(x,y): 缓慢变化,频率集中在低频部分 fr(x,y): 包含景物各种信息,高频分量丰富
处理
lnf x , y lnfi x , y lnfr x , y FFT lnf x , y FFT lnfi x , y FFT lnfr x ,y
H
u,
v
0 1
D u,v D0 D u,v D0
其中D u,v u2 v2
2 高通滤波器法
0.8
0.6
0.4
-4
0.2
-4
-2
0 -2
vu
2
2
4
4
0.8 0.6 0.4 0.2
-4
-2
0
2t
4
2 高通滤波器法
3)巴特沃思高通滤波器(BHPF)
n阶巴特沃思(Butterworth)高通滤波器
u
Ho
u
Ps
Ps u u Pn
u
5 维纳估计器
4)维纳去卷积
目标:信号s(t)既受到f(t)线性系统模糊,又受到 加性噪声源n(t)的污染。
设计滤波器g(t)既能去卷积,又能抑制噪声信号。
5 维纳估计器
输入信号的频谱
X u F uS u N u
输出信号的频谱
2 高通滤波器法
系统工程学

第四章 网络计划技术:网络计划技术是系
统管理的重要工具之一,是系统工程常 用的管理技术。它是利用网络图对计划 任务的进度、费用及其组成部分之间的 相互关系进行计划、检查和控制,以使 系统协调运转的科学方法。通过本章学 习,同学们能够了解了解网络计划技术知识
及其应用领域 ,掌握CPM,PERT,GERP的工 程实际应用。
资源能源问题、新农村建设、城镇化、社会保 障、应急管理等) 管理科学、经济科学、工程科学各种前沿问题 落实科学发展观 社会信息化变革 重大投资和大型项目管理 思维科学和生命科学
二、系统工程研究对象
(一)SE的研究对象是大规模复杂系统 该类系统的主要特点有:规模庞大、结构复杂、属性及目
标多样、一般为人机系统、经济性突出等。 (二)系统的概念
(三)系统的分类
自然系统与人造系统 实体系统与概念系统 动态系统与静态系统 封闭系统与开放系统
主要明确SE研究什么样的系统 问题?
三、SE的内容与特点 所谓SE,是用来开发、运行、革新一个大
规模复杂系统所需思想、程序、方法的综合 (或总称)。
SE强调以下基本观点: 1)整体性和系统化观点(前提) 2)总体最优或平衡协调观点(目的) 3)多种方法综合运用的观点(手段) 4)问题导向及反馈控制观点(保障)
《系统工程学》是工业工程专业以及管 理工程专业的基础课程之一。它的任务 是通过对本课程的学习,使学生熟悉系 统及系统工程的概念和内涵,了解国内 外系统工程的发展现状和趋势,掌握系 统工程的预测技术、分析方法、设计理 论、模型与仿真、决策分析,并引导学 生将系统工程的观点、思想、方法和原 理具体应用到工程机械的制造、规划和 管理以及路桥机械化施工等工程实践中。
逻辑 步骤 工作 活动 时间 项目
基于一个模糊蕴涵的概率密度函数和模糊系统
18 3
辽 宁师 范大 学 学报 ( 自然科 学 版 )
第3 4卷
令
H(,, V 全 I I R xydd 2 0 ) (,) x n, y
金
() 3
() 4
则( , ≥0 ( I I f xy dd 口 ( ,) ; 6 ( ,)yx—1 ) ) .
因此 , ( f x,)可 视 为 某 随 机 向 量 ( , 的联 合 概 率 密 度 . 定 义 1 设 , z, ( )为 某 随 机 向 量 ( ,)的联 合 概 率 密 度 , 条 件 数 学 期 望 e叩 称
I i ,h nY i ( f sAf t e sBf i= 1, … ,1 2, , ) () 1
构 造 模 糊 系 统 的 四 步 之 一 就 是 在 模 糊 推 理 规 则 之 上 构 造 模 糊 推 理 关 系 ,通 常 ,模 糊 推 理 关 系 是 当 ∈
[ 计 ] , x,)一 O A , )V O A件 ( ) B l ) .但在本文 中假设 数据是单 词 的,因此 ,模糊 推理关 矗, 时 R( ( ()B( ) ( z , 件 ( ) 系变成如下形式 : 当 ∈ r 甜 时 , x, ]
:
(b i^16口 6 a) 口 ( )≥ ,一 — ,二
I (斗 z^ i), , , ∈ ‘ A1) B )j ( D ( ( z )
, ’ 1 A z^ y ,i ) E ‘ ) Bl) |, , ∈ _ I( ( ( ) ( i
L 0 , 其 他
于 △: A1)d f z + 卅 B 是 斗z + 。)d dz J x (d A (dz ( d
iJ Yl J zi J t J zi J ,i
盐酸戊乙奎醚注射液致视物模糊的系统评价与临床分析
盐酸戊乙奎醚注射液玫视物模糊的糸统评价与临床分析!薛文鑫",李静1#,宗东江",孙劲文",王应利A,李蕾<(1.应急总医院药学部,北京100028;2•应急总医院普外肿瘤科,北京100028;3•应急总医院眼科,北京100028;4•应急总医院麻醉科,北京100028)中图分类号R971q.92文献标志码A文章编号1672-2124(2020)12-1478-05DOI10.14009/j.issn.1672-2124.2020.12.018摘要目的:基于系统评价和案例分析,探讨盐酸戊乙奎醚注射液引发视物模糊的临床特点及预后。
方法:收集应急总医院上报的盐酸戊乙奎醚注射液引起视物模糊的病例,同时检索建库至2018年9月中国知网、万方数据库及中国生物医学文献数据库收录的关于盐酸戊乙奎醚注射液引起视物模糊的个案报告或临床研究。
结果:(1)系统评价。
纳入系统评价的临床研究文献共6篇(涉及患者710例),结果显示,戊乙奎醚致视物模糊发生率与东莨菪碱(O%=1.60,95%&=0.75~3.39,P=O.22)、阿托品(。
%=1.24,95%&=0.58~2.67,!=0.58)的差异均无统计学意义。
(2)案例分析。
共纳入盐酸戊乙奎醚注射液引发视物模糊的病例10例,其中女性9例,男性1例;年龄8~82岁,其中青年人(18-40岁)最多(7例,占70%);盐酸戊乙奎醚注射液的用药目的,8例为麻醉前用药,2例用于解除胃肠道痉挛;盐酸戊乙奎醚注射液的给药剂量为0.3-2mg,1例老年患者超量使用;盐酸戊乙奎醚注射液的给药方法为静脉注射和肌内注射;患者用药后表现为视近物模糊,自行好转,持续时间约16h至7d:10例患者的不良反应关联性评价结果均为“很可能”。
结论:盐酸戊乙奎醚注射液引起视物模糊多发生于青年女性,其致视物模糊发生率与东莨菪碱、阿托品相当,临床表现为视近物模糊,持续时间约1周,无需特殊处理,可自行好转,预后良好。
基于模糊数学理论的大型升船机可靠性分析
中 图分类 号 :0 4 22
文 献标识 码 :A d i O3 6 /.s .0 2 6 7 .0 1 60 4 o: .9 9j sn10 — 6 32 1 . .0 l i 0
T e h La g h p l l b l y An l ss Ba e n F z y Th o y r e S i - i SRei i t a y i s d o u z e r t f a i
1
影 响其 可靠 性分 配 的影 响 因素为 :子 系统 的复 杂度 ( 、子 系统 重要 度 ( 、子系统 技术 水平 ( 、子 系统 U) u) u)
f 工作强 度 (4、系统 工作 环境 ( 和维修 的难 易程 度 ( u) I) 1 1) 1
( )确 定 隶属 函数 矩 阵R:设 因素 集 U为 :U fi : 等六个 主要 因素 。 2 = u , 按 大 修 周期 为 一 年 的要 求 在系 统 可 靠性 指 标 :R = il , 6, =,… } 其中U 2 i 一对升船机系统可靠性分配有着重要 I 09 ,进行 可靠性 分配 。 .9 影响的因素。设备择集V为: =(, l, } V vj ,…6,其中 j= 2 f
a 2 a2 … 1 1
a2 n
A=
收稿 日期 : 0 1 0 — 3 2 1 — 92
am1 a … am
基 金 项 目: 国家高技 术研 究发展 计划 (6 计 ̄ - 0 7 A0 Z 2 ) 83 q 20 A 4 4 8
作 者 简 介 : 鹏 ( 8 一 , 男 , 山 东泰 安 人 ,机 械 科 学研 究 总 程 1 7) 9
数控珩磨机进给系统模糊神经网络控制研究
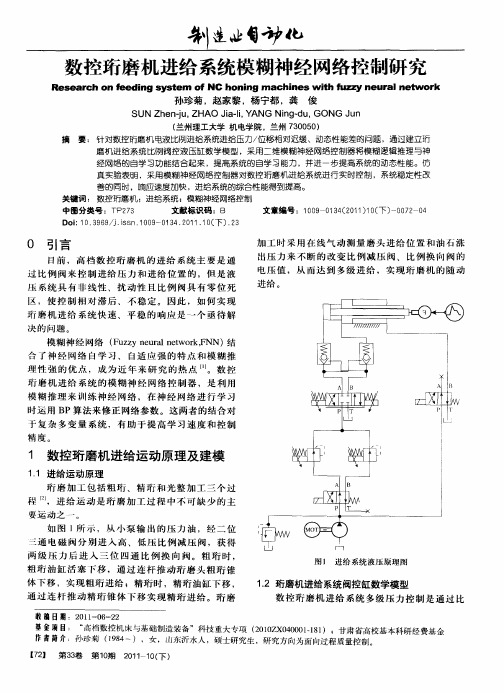
模糊 神 经 网络 ( u z e rl ew r ,N 结 F zyn ua nt okF N)
合 了神 经 网络 自学 习 、 自适 应 强 的特 点 和 模 糊 推 理 性 强 的优 点 ,成 为近 年 来 研 究 的 热 点 …。数 控
珩 磨 机 进 给 系统 的模 糊 神 经 网络 控 制 器 ,是 利 用 模 糊 推 理 来 训 练 神 经 网络 ,在 神 经 网络 进 行 学 习 时运 用 B P算法 来 修正 网络参 数 。这 两 者 的结合 对 于 复 杂 多 变 量 系统 ,有 助 于 提 高 学 习速 度 和 控 制
三通 电磁 阀分 别 进 入 高 、低 压 比例 减 压 阀 ,获 得 两 级 压 力 后 进 入 三 位 四通 比 例 换 向 阀。 粗 珩 时 ,
粗 珩 油 缸活 塞 下 移 ,通 过 连 杆 推 动珩 磨头 粗 珩 锥
体 下 移 ,实 现 粗珩 进 给 ;精 珩 时 ,精 珩 油 缸下 移 , 通 过 连 杆 推 动 精 珩 锥 体 下 移 实 现 精 珩 进 给 。珩 磨
层 3:规 则 层 。这 一 层 是 固定 结 点 ,它 首 先
作 所有输 入 信 号的积 ,并 归一 化激 励强 度 ;
云
”4 ’9
其 中 : f ^() (c ,j 1 … , = f e) = , 7 e
层4 输出 : 隶属函 数层。 4 , 云(eqc? 0, f i— - 9 eI) 一 i 1 +j-j i - "
2 f n ,te B )I e s iNB a d ciNM h nUi P . e s s
一
m一 外负载 质量 ,k ; g
一
研一传感器 的位移 / 电压转换 系数 , / V m;
语言真值直觉模糊命题逻辑系统的推理规则
1 . 辽宁师范大学 计算机与信息技术学院, 辽宁 大连 162 109
2 . 辽宁师范大学 数学学院, 辽宁 大连 162 109
1S h o f Co u e n n o m ai n T c n l g Lio i g No a i e s y, l n, i o i g 6 2 Ch n . c o l o mp tr a d I f r to e h o o y, a n n r l Un v r i Dai L a n n 1 0 9, i a m t a 1
h to S t e meh d i mo e fe i l n re t e f r t e d c so k n r b e r x b e a d e c i o e ii n ma i g p o l m. l i v h
K e r s l g it rt -au ; t io it z rp sto u c ran e s nn y wo d : iu s c tu v le i ut n si f z p o o i n; etit ra o ig n i h n i cu y i n y
隧道照明模糊控制系统开发
a ( t e d sg ff z y c n r l o e r e c i e .Th e h d i f e t e a d e e g — n i h e i n o u z o t o d l e d s rb d m a em t o e f c i n n r y s v s vn a i g.wh c s p o e y c mp rn t h i h i g c r e o if r n o t o t — ih i r v d b o a i g wih t el tn u v fd fe e tc n r lme h g
理 位 置 的局 限 和 经 济 条 件 的 限 制 , 多 数 隧 道 照 大
பைடு நூலகம்
明系统 长 期 以来处 于 一 个低 水 平 且 耗 电量 大 的状 态 【. 2 中国 已经 在 大力 推 进 建设 节 约 型社会 , 高 ] 提 隧道 照 明系 统 的质 量 刻不 容 缓. 者 拟 采 用 一 种 笔
明亮度 , 以期 满足 隧道 照 明 的要求 , 时也 保 证 隧 同 道 内 的行 车安 全 , 大大 节约 隧道 照明 的耗 电量 . 且
设 施 [ . 道是 公 路 的重 要 组成 部 分 , 1隧 ] 且运 行 费用 高 昂. 因此 , 何 在 确 保 隧道 行 车 安 全 的 前 提 下 , 如 提高 隧道 照 明 效 率 、 省 电能 成 了隧 道 交 通 技 术 节 研 究 的焦 点 . 隧道 照 明 是 隧道 系统 的必 要 部分 , 它 的质 量直 接 影 响 隧道 内 的行 车 安 全 , 时它 也 是 同
基于Choquet模糊积分的激光主动成像性能综合评价
中图分类 号 : N 4 T 29 文献 标识码 : A
Co pr he sv s e s e to m a e p r o m a c fl s r a tv m e n i e a s s m n fi g e f r n e o a e c i e
摘 要 : 图像 质量 评价 是研 究激 光 主 动成 像 探 测 系 统 成像 性 能 的重 要 内容 , 文 从 图像 的 噪 本
声、 灰度和纹理等方面对距离选通激光主动成像 目 图像进行 了量化评价。并且运用 C out 标 hqe
模 糊积 分将 单 因素评价 参 数计 算值 与专家 打分 确定 的权 重 系数 结 合起 来 , 建 了激 光 主 动探 构
第4 O卷 第 1 O期
21 00年 1 O月
激 光 与 红 外
L E AS R & I R NF ARE D
V 1 4 No 1 o . 0, . 0
Oco e , 01 tb r 2 0
文章编号: 0 - 7 (00 1- 5- 1 1 08 21 )01 90 0 5 于 C out 糊 积分 的激 光 主 动成 像 性 能综 合 评 价 hq e模
范有 臣 李迎 春。 孙华 燕 戴 得德 赵 , , , , 云
(. 1解放军装备指挥技术学院研究生 院, 北京 1 11 ;. 0 4 6 2 解放军装备指挥技术学 院光 电装备系 , 北京 11 1 04 6; 3 解放军 9 8 4部 队, . 25 广东 湛江 54 0 ;. 2 0 54 解放军 6 2 3部队 , 11 山西 临 汾 0 10 ) 4 0 0
一类离散切换模糊组合系统的分散控制
= f = , = n, : Q 一 … Q
i1 - - t =l
∑
则有
U
u = \ ) 且 u = 其中f ∈ =1, m) i , …u { , ; , 0 , { …,t, ≠_.当 , 2
( f =i ( ) )
() 8
( i 时,设计 切换律 f )
lws a d d c n r l e o to lr r e i n d v a sn l a u o u ci n e o n u t l a n e e t i d c n r l s we e d sg e i i g e Ly p n v f n t sm t d a d m l p e a z e o h i
(( ) zf = )
il = = l
,
∑兀 (( , f ) )
( f 表示 ( 属于模糊集 z( ) ) f )
0畦 (≤ 兰 () ≤ (f l z : ) , ) (1 f )
的隶属度。
根据 平行 分布补 偿 (DC 技 术 ,设计 分散 离散切 换模 糊状 态 反馈控 制器 : P )
d c nrl e tts fe b c o t l r n e e t l e wi hn a r i e .Smu ain e e t i d sae e d a k c n ol s a d d c nr i d s t ig lws wee gv n i lt az r e az c o
(=∑ (f ,t f 一 z) x ) ) ( k 嵫 (
f =I
( 3 )
Ⅳ
将式 () 3 带入 ( 得到离散切换模糊组合系统的闭环结构如下 : 2 )
(1 ∑ f) +=
智能控制第2章 模糊控制改进(4)

2.5.2 模糊控制的改进方法
常规PID参数的模糊自整定(用调节变化量的方式) Fuzzy控制器
de/dt
dkp dki dkd
r
-
e
PID控制器
对象
y
College of Information Science and Engineering, Chongqing Jiaotong University
9
2.5.2 模糊控制的改进方法
并联控制
复合控制器 模糊控 制器
+
对象
PI 控制器
+
当|E|≥1,模糊控制器开关闭合,PI控制器的输出与模糊控制器输
出的和作为被控对象输入, 克服不确定性因素影响,且有较强控制作用;
当|E|=0时, 模糊控制器输出断开,仅有PI控制器控制对象, 消除稳 态误差。
Simulink仿真实现
College of Information Science and Engineering, Chongqing Jiaotong University
6
Switch介绍
College of Information Science and Engineering, Chongqing Jiaotong University
2.5.2 模糊控制的改进方法
2 自校正模糊控制
针对普通模糊控制器的参数和控制规则在系统运行时无法在线调 整,自适应能力差的缺陷,自校正模糊控制器可以在线修正模糊控制 器的参数或控制规则,从而增强了模糊控制器的自适应能力,提高了 控制系统的动、静态性能和鲁棒性。 自校正模糊控制器通常分为两种: 参数自校正模糊控制器 规则自校正模糊控制器
3
2.5.2 模糊控制的改进方法
基于模糊滑模控制的航空EMA调速系统
收稿日期:2010-06-15 修回日期:2010-07-28 作者简介:吕永健(1970- ),男,陕西泾阳人,副教授,博士,研究方向:电机与电器。
文章编号:1002-0640(2011)08-0064-03基于模糊滑模控制的航空EMA 调速系统吕永健1,解 亮2,李 飞2(1.西北工业大学自动化学院,西安 710068,2.空军工程大学工程学院,西安 710038) 摘 要:永磁无刷直流电动机是航空机电作动器(EM A )实现作动控制的关键部件,而电机控制方式的优劣则是决定航空EM A 调速系统性能的重要因素。
传统的滑模变结构控制策略由于存在抖振现象,对永磁无刷直流电机的控制精度和稳定性不利。
针对航空EM A 调速控制精度要求高的特点,将模糊控制和滑模控制相结合,把开关函数及其微分作为输入量,通过模糊推理获得滑模控制的控制量,该控制器既保持了常规模糊控制器的优点,又减弱了滑模控制的抖振现象。
仿真及实验表明:该控制器稳定性好,对参数变化有很强的鲁棒性,系统响应速度快,具有较高的控制精度。
关键词:机电作动器,无刷直流电动机,模糊滑模控制中图分类号:T M 351 文献标识码:AA Fuzzy Sliding Mode Controller for EMA in AircraftL Yong -jian 1,XIE Liang 2,LI Fei2(1.A utomation College ,N orthwestern Poly technical U niver sity ,X i ’an 710068,China ,2.Eng ineer ing College ,A ir F or ce E ngineering Univ ersity ,X i ’an 710038,China ) Abstract :Per manent M agnet Brushless DC M otor (BLDCM )is a key secto r of Electro -MechanicalActuato rs (EM A)in Aircraft,and its co ntrol metho d is an important facto r for the perfo rmance of EM A.Tr aditio nal sliding mode control has its disadvantages for the contr ol pr ecision and stability of BLDCM due to its chatter ing .T o improv e the co ntro l perform ance of EMA ,fuzzy contr ol and sliding m ode contr ol are integrated in this paper.In this co ntroller ,sw itch function and its derivative act as the input o f fuzzy co ntroller ,and the o utput is g et fro m the fuzzy illation.By this w ay ,the controller keeps the ex cellences of fuzzy control and w eakens the chattering of sliding mo de contro l .Simulation and ex periment results show that the contr oller is o f hig h per for mance of stability ,r obustness under parameter variation as w ell as preferable response speed and contro l precision.Key words :EM A,BLDCM ,fuzzy sliding mode control引 言机电作动器(EMA )是多电飞机电力作动系统的关键部件,其控制器多采用PID 控制器,但由于其非线性使它很难满足无刷直流电力作动器的控制性能需求。
模糊自适应PID在配料称重系统中的设计

K wor :u z n r , gr en ghig y t ey dsF z y co toln edi twei n s sems, m ua i I Si lt on
工业 配 料 控 制 过程 大致 相 同 ,一 般 通 过 称 重 传 感 器 和 速 度 传感 器测 量 出物 料 的 重量 信 号 和 速 度 信 号 ,经 计 算 后 得 到 的 物
差 的变 化 为 输 入量 时既 能 反 映 系 统 的 差 值 和 差 值 的 变 化 ,体 现 受 控 过 程 输 入 变量 的动 态 特 性 是 目前 采 用 较 广 泛 的 一 种 模 糊 控 制 器 。在 实 际 过程 控 制 中 , 维 模 糊 控 制 器 结 构 较 复 杂 、 理 时 三 推 间 长 , 求 的硬 件 设 备 精 度 和 投 资 、 护 费 用 较 高 , 要 维 因此 一 般 较 少 选 用 三 维 模 糊控 制 器 。 ( ) 糊 控制 规 则 的设计 2模 模 糊 规 则 在设 计 模 糊 控 制 器 有 着 重 要 的作 用 ,建 立 模 糊 控 制 规 则 的方 法 通 常 是经 验 归 纳 法 ,也 就 是 根 据 操 作 人 员 或 专 家 的过 程 数 据 经 验 , 结 得 出 的模 糊 控 制 语 句 。 理 的模 糊 控 制 规 总 合 则 要 保 证 对 任 意输 入都 有 相 应 的控 制 规 则 起 作 用 ,控 制 规 则 之
马 加 明 张 民 张 慧 慧 ( 青岛理工大学, 山东 青岛 2 6 3 ) 6 0 3
摘 要
在 深入 了解 配料 系统 的基 础 上 , 对传 统 配料 系统 存 在 的 配 料 精 度 不 高 、 针 系统 稳 定性 差 的 问题 进 行 创 新 和 探 索研 究 。
非线性广义模糊系统的镇定控制器设计与分析
为了分析 系统 ( ) 2 的稳定性 ,文献 【 引入 9 ] 如 下假 设条 件 :
假设 1
出限 制 ,得到 了 系统 稳 定 的充 分条 件 ,文 献 【】 9 给
出 了控制 器设 计 方 法 。但 文献 [] 9 中给 出 了控制 器 的设 计 方 法 不 是 L 的 ,计算 量 也 很 大 ,因此 在 MI
其 中 :xt∈R 是 状 态 向 量 , ( ∈R 是 控 制 ( ) f )
输入, iB是维数适当的 A i , 常数矩阵, = … ]
是 件 量 ∑h =. h ≤。 前 变 , ) 1 ≤i) 1 ( 0 (
系统 ()的 自治 系统为 1
(: f )
) 删 (
假设 : 假设 2
V ∑h P )P( + () = ) ( ( ( + ) 尸 )
=
∑ * P )P( +∑ . (x ( ( + ) ( ) )T ) ) c
厂 r ]
:
∑ r
≤
l
厂
Q ( Q 1 f + I
务1
l 出 I 5
非线性广义模糊 系统 的镇定控制器设计与分析
Nonlnearg er ague ys em i en alv s t des gn an anal si ft es i d y s o he pr enc o i d cont ol e f m n r
+
P : ()
l( 0 fP P 2 3i J )
>。 =l ]则 0设 [ , 有 e k
V , = *f ∑ (= f ( ( ( ) X ( ( f ( x T) E ) ) ) ∑ ) )
利用广义 L au o ypn v函数 () 5 给出如下定理 : 定理 1如果存在常数 , , 使假设 2 :…, 成 立 ,且存 在矩 阵 P (= 12 …,)P , 下面 的 f , , r, :P 使
基于DCS的锚链调质炉炉温模糊控制系统
Aber c ta t Ths i pa per n rdu s u z c toltchnque ito ce f z y on r e i wi s l-s u a d el—c r c whch s t h ef t dy n s f ore t i i us d no n or e it a ch ch i h a an e t 正 功 能 的模 糊 控 刺 技 术 在 锚 链 调 质 炉 炉 温 DC 中的应 用 , 现 了调 质 炉 的精 确 控 温 及 控 制 策 略 S 实 和 控 制 参 数 的 自适 应 , 高 了 系统 的 鲁 棒 性 , 提 达到 了较 高的 控 制 水 平 。
te t r a men u n e tf r ac DCS, a ttde on r t ex c i u c tol empert r o an ho ch i h t rat e t u n ce、 el— aue f c r an ea te m n f r a s f ada o co tol taeg pt f n r sr t y a n r p ame e h be n o e tue, bus fs s e nd co tol ar t r as e c m r r o t o y t m h s bee i prve a hi e c to l e h b n c e d. a n m o d, gh r onr l ev l as ee a hive K wo d : t lge t onr lu y onr l el s u ,el co r t ey r si el n c to, zz c to, f t dys f n i f s — — rec
模糊PID控制温控系统设计C语言程序代码
/******************************************************************** 模糊PID控制温控系统仿真设计C程序代码********************************************************************/ #include<reg52.h>#define uchar unsigned char#define uint unsigned int#define PULSE 200#define number 0.035sbit SDO = P2^0;sbit SDI = P2^1;sbit CS = P2^2;sbit CLK = P2^3;sbit EOC = P2^4;sbit RS = P2^5;sbit RW = P2^6;sbit EN = P2^7;sbit KEY1= P3^0;sbit KEY2= P3^1;sbit KEY3= P3^2;sbit KEY4= P3^3;sbit KEY5= P3^4;sbit IN1 = P3^5;sbit IN2 = P3^6;sbit ENA = P3^7;uchar flag;uchar flag_start;float S_temp=60.0;float P_temp=20.0;float Kp;float Ki;float Kd;float Err=0.0;float Last_Err=0.0;float D_Err=0.0;float Sum_Err=0.0;float U=0.0;/******************************函数功能:延时******************************/void delay_ms(uchar z){uchar j;for(i=z;i>0;i--)for(j=360;j>0;j--);}void delay_us(uchar z){uchar i;for(i=z;i>0;i--);}void LCD_WriteData(uchar Dat){RS = 1;P1 = Dat;delay_us(10);EN = 1;delay_us(10);EN = 0;}void LCD_WriteCOM(uchar com){RS = 0;P1 = com;delay_us(10);EN = 1;delay_us(10);EN = 0;}void Show_Num(uchar x,uchar y,uchar n,float num) {uchar a[3];uchar i;uint Temp;Temp=(int)num;for(i=0;i<n;i++){a[i] = Temp%10;Temp = Temp/10;}if(y%2 == 1)LCD_WriteCOM(0x80+x);LCD_WriteCOM(0x80+0x40+x);for(i=n;i>0;i--)LCD_WriteData(a[i-1]+0x30);}void Show_Ki(uchar num_Ki){uchar Temp;num_Ki=Ki*100;Temp=(uchar)num_Ki;Show_Num(10,2,1,Temp%10);Temp=Temp/10;Show_Num(9,2,1,Temp%10);Temp=Temp/10;Show_Num(7,2,1,Temp);}void Show_char(uchar x,uchar y,uchar ch) {if(y%2 == 1)LCD_WriteCOM(0x80+x);elseLCD_WriteCOM(0x80+0x40+x);LCD_WriteData(ch);}void LCD_Init(void){RW = 0;EN = 0;LCD_WriteCOM(0x38);LCD_WriteCOM(0x0c);LCD_WriteCOM(0x06);LCD_WriteCOM(0x01);}/*********************************** 函数功能:显示函数*************************************/ void LCD_display(void){Show_char(1,1,'T');delay_us(10);Show_char(0,1,'P');delay_us(10);Show_char(1,1,'T');delay_us(10);Show_char(2,1,':');delay_us(10);Show_Num(3,1,3,P_temp);delay_us(10);Show_char(10,1,'S');delay_us(10);Show_char(11,1,'T');delay_us(10);Show_char(12,1,':');delay_us(10);Show_Num(13,1,3,S_temp);delay_us(10);Show_char(0,2,'P');delay_us(10);Show_char(1,2,':');delay_us(10);Show_Num(2,2,2,Kp);delay_us(10);Show_char(5,2,'I');delay_us(10);Show_char(6,2,':');delay_us(10);Show_char(8,2,'.');delay_us(10);Show_Ki(Ki);delay_us(10);Show_char(12,2,'D');delay_us(10);Show_char(13,2,':');delay_us(10);Show_Num(14,2,2,Kd);delay_us(10);}/************************************ 函数功能:定时器2初始化*************************************/ void Timer2_Init(){RCAP2H =(65536-300)/256;RCAP2L =(65536-300)%256;TH2 = RCAP2H;TL2 = RCAP2L;ET2 = 1;TR2 = 1;EA = 1;}/************************************* 函数功能:键盘扫描,调整设置温度****************************************/ void key_scan(void){if(KEY1==0){delay_ms(1);if(KEY1==0){S_temp=S_temp+1;if(S_temp>=200)S_temp=200;while(!KEY1);}}if(KEY2==0){delay_ms(1);if(KEY2==0){if(S_temp>0)S_temp=S_temp-1;else if(S_temp<=0)S_temp=0;while(!KEY2);}}if(KEY3==0){delay_ms(1);if(KEY3==0){if(S_temp<=190)S_temp=S_temp+10;while(!KEY3);}}if(KEY4==0){delay_ms(1);if(KEY4==0){if(S_temp>=10)S_temp=S_temp-10;while(!KEY4);}}if(KEY5==0){delay_ms(1);if(KEY5==0){flag_start=1;while(!KEY5);}}}/************************************ 函数功能:PID的计算**********************************/ void PID_Calculate(){Err = S_temp - P_temp;Sum_Err += Err;D_Err = Err - Last_Err;Last_Err = Err;U=Kp*Err+Ki*Sum_Err+Kd*D_Err;U=(int)U;if(U>=0){if(U>=200)U=200;flag=1;}else{U=-U;if(U>=200)U=200;flag=0;}}/***********************************************函数功能:PID参数Kp的计算************************************************/float fuzzy_kp(float e, float ec) //e,ec,表示误差,误差变化率{float Kp_calcu;uchar num,pe,pec;float code eRule[7]={-3.0,-2.0,-1.0,0.0,1.0,2.0,3.0}; //误差E的模糊论域float code ecRule[7]={-3.0,-2.0,-1.0,0.0,1.0,2.0,3.0}; //误差变化率EC的模糊论域float eFuzzy[2]={0.0,0.0}; //隶属于误差E的隶属程度float ecFuzzy[2]={0.0,0.0}; //隶属于误差变化率EC的隶属程度float code kpRule[4]={0.0,8.0,16.0,24.0}; //Kp的模糊子集float KpFuzzy[4]={0.0,0.0,0.0,0.0}; //隶属于Kp的隶属程度int code KpRule[7][7]= //Kp的模糊控制表{3,3,3,3,3,3,3,2,2,2,2,1,2,2,1,1,1,1,1,1,1,1,1,0,1,0,1,1,0,0,1,0,0,1,0,0,1,0,1,0,0,2,3,3,3,3,3,3,3};/*****误差E隶属函数描述*****/if(e<eRule[0]){eFuzzy[0] =1.0;pe = 0;}else if(eRule[0]<=e && e<eRule[1]){eFuzzy[0] = (eRule[1]-e)/(eRule[1]-eRule[0]);pe = 0;}else if(eRule[1]<=e && e<eRule[2]){eFuzzy[0] = (eRule[2] -e)/(eRule[2]-eRule[1]);pe = 1;}else if(eRule[2]<=e && e<eRule[3]){eFuzzy[0] = (eRule[3] -e)/(eRule[3]-eRule[2]);pe = 2;}else if(eRule[3]<=e && e<eRule[4]){ eFuzzy[0] = (eRule[4]-e)/(eRule[4]-eRule[3]);pe = 3;}else if(eRule[4]<=e && e<eRule[5]){eFuzzy[0] = (eRule[5]-e)/(eRule[5]-eRule[4]);pe = 4;}else if(eRule[5]<=e && e<eRule[6]){eFuzzy[0] = (eRule[6]-e)/(eRule[6]-eRule[5]);pe = 5;}else{eFuzzy[0] =0.0;pe =5;}eFuzzy[1] =1.0 - eFuzzy[0];/*****误差变化率EC隶属函数描述*****/if(ec<ecRule[0]){ecFuzzy[0] =1.0;pec = 0;}else if(ecRule[0]<=ec && ec<ecRule[1]){ecFuzzy[0] = (ecRule[1] - ec)/(ecRule[1]-ecRule[0]);pec = 0 ;}else if(ecRule[1]<=ec && ec<ecRule[2]){ecFuzzy[0] = (ecRule[2] - ec)/(ecRule[2]-ecRule[1]);pec = 1;}else if(ecRule[2]<=ec && ec<ecRule[3]){ecFuzzy[0] = (ecRule[3] - ec)/(ecRule[3]-ecRule[2]);pec = 2 ;}else if(ecRule[3]<=ec && ec<ecRule[4]){ ecFuzzy[0] = (ecRule[4]-ec)/(ecRule[4]-ecRule[3]);pec=3;}else if(ecRule[4]<=ec && ec<ecRule[5]){ ecFuzzy[0] = (ecRule[5]-ec)/(ecRule[5]-ecRule[4]);pec=4;}else if(ecRule[5]<=ec && ec<ecRule[6]){ ecFuzzy[0] = (ecRule[6]-ec)/(ecRule[6]-ecRule[5]);pec=5;}else{ecFuzzy[0] =0.0;pec = 5;}ecFuzzy[1] = 1.0 - ecFuzzy[0];/*********查询模糊规则表*********/num =KpRule[pe][pec];KpFuzzy[num] += eFuzzy[0]*ecFuzzy[0];num =KpRule[pe][pec+1];KpFuzzy[num] += eFuzzy[0]*ecFuzzy[1];num =KpRule[pe+1][pec];KpFuzzy[num] += eFuzzy[1]*ecFuzzy[0];num =KpRule[pe+1][pec+1];KpFuzzy[num] += eFuzzy[1]*ecFuzzy[1];/*********加权平均法解模糊*********/ Kp_calcu=KpFuzzy[0]*kpRule[0]+KpFuzzy[1]*kpRule[1]+KpFuzzy[2]*kpRule[ 2]+KpFuzzy[3]*kpRule[3];return(Kp_calcu);}/***********************************************函数功能:PID参数Ki的计算************************************************/float fuzzy_ki(float e, float ec){float Ki_calcu;uchar num,pe,pec;float code eRule[7]={-3.0,-2.0,-1.0,0.0,1.0,2.0,3.0};float code ecRule[7]={-3.0,-2.0,-1.0,0.0,1.0,2.0,3.0};float eFuzzy[2]={0.0,0.0};float ecFuzzy[2]={0.0,0.0};float code kiRule[4]={0.00,0.01,0.02,0.03};float KiFuzzy[4]={0.0,0.0,0.0,0.0};int code KiRule[7][7]={0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,2,0,0,0,0,0,1,3,3,3,3,3,3,3};/*****误差隶属函数描述*****/if(e<eRule[0]){eFuzzy[0] =1.0;pe = 0;}else if(eRule[0]<=e && e<eRule[1]){eFuzzy[0] = (eRule[1]-e)/(eRule[1]-eRule[0]);pe = 0;}else if(eRule[1]<=e && e<eRule[2]){eFuzzy[0] = (eRule[2] -e)/(eRule[2]-eRule[1]);pe = 1;}else if(eRule[2]<=e && e<eRule[3]){eFuzzy[0] = (eRule[3] -e)/(eRule[3]-eRule[2]);pe = 2;}else if(eRule[3]<=e && e<eRule[4]){ eFuzzy[0] = (eRule[4]-e)/(eRule[4]-eRule[3]);pe = 3;}else if(eRule[4]<=e && e<eRule[5]){eFuzzy[0] = (eRule[5]-e)/(eRule[5]-eRule[4]);pe = 4;}else if(eRule[5]<=e && e<eRule[6]){eFuzzy[0] = (eRule[6]-e)/(eRule[6]-eRule[5]);pe = 5;}else{eFuzzy[0] =0.0;pe =5;}eFuzzy[1] =1.0 - eFuzzy[0];/*****误差变化隶属函数描述*****/if(ec<ecRule[0]){ecFuzzy[0] =1.0;pec = 0;}else if(ecRule[0]<=ec && ec<ecRule[1]){ecFuzzy[0] = (ecRule[1] - ec)/(ecRule[1]-ecRule[0]);pec = 0 ;}else if(ecRule[1]<=ec && ec<ecRule[2]){ecFuzzy[0] = (ecRule[2] - ec)/(ecRule[2]-ecRule[1]);pec = 1;}else if(ecRule[2]<=ec && ec<ecRule[3]){ecFuzzy[0] = (ecRule[3] - ec)/(ecRule[3]-ecRule[2]);pec = 2 ;}else if(ecRule[3]<=ec && ec<ecRule[4]){ ecFuzzy[0] = (ecRule[4]-ec)/(ecRule[4]-ecRule[3]);pec=3;}else if(ecRule[4]<=ec && ec<ecRule[5]){ ecFuzzy[0] = (ecRule[5]-ec)/(ecRule[5]-ecRule[4]);pec=4;}else if(ecRule[5]<=ec && ec<ecRule[6]){ ecFuzzy[0] = (ecRule[6]-ec)/(ecRule[6]-ecRule[5]);pec=5;}else{pec = 5;}ecFuzzy[1] = 1.0 - ecFuzzy[0];/***********查询模糊规则表***************/num =KiRule[pe][pec];KiFuzzy[num] += eFuzzy[0]*ecFuzzy[0];num =KiRule[pe][pec+1];KiFuzzy[num] += eFuzzy[0]*ecFuzzy[1];num =KiRule[pe+1][pec];KiFuzzy[num] += eFuzzy[1]*ecFuzzy[0];num =KiRule[pe+1][pec+1];KiFuzzy[num] += eFuzzy[1]*ecFuzzy[1];/********加权平均法解模糊********/ Ki_calcu=KiFuzzy[0]*kiRule[0]+KiFuzzy[1]*kiRule[1]+KiFuzzy[2]*kiRule[2] +KiFuzzy[3]*kiRule[3];return(Ki_calcu);}/***********************************************函数功能:PID参数Kd的计算************************************************/float fuzzy_kd(float e, float ec){float Kd_calcu;uchar num,pe,pec;float code eRule[7]={-3.0,-2.0,-1.0,0.0,1.0,2.0,3.0};float code ecRule[7]={-3.0,-2.0,-1.0,0.0,1.0,2.0,3.0};float eFuzzy[2]={0.0,0.0};float ecFuzzy[2]={0.0,0.0};float code kdRule[4]={0.0,1.0,2.0,3.0};float KdFuzzy[4]={0.0,0.0,0.0,0.0};int code KdRule[7][7]={3,3,3,2,2,2,2,2,2,2,1,1,1,1,1,1,2,1,1,2,1,1,1,0,1,0,1,1,1,1,0,0,0,1,1,2,2,1,0 ,1,1,1,3,3,3,3,2,3,2};/*****误差隶属函数描述*****/if(e<eRule[0]){pe = 0;}else if(eRule[0]<=e && e<eRule[1]){eFuzzy[0] = (eRule[1]-e)/(eRule[1]-eRule[0]);pe = 0;}else if(eRule[1]<=e && e<eRule[2]){eFuzzy[0] = (eRule[2] -e)/(eRule[2]-eRule[1]);pe = 1;}else if(eRule[2]<=e && e<eRule[3]){eFuzzy[0] = (eRule[3] -e)/(eRule[3]-eRule[2]);pe = 2;}else if(eRule[3]<=e && e<eRule[4]){ eFuzzy[0] = (eRule[4]-e)/(eRule[4]-eRule[3]);pe = 3;}else if(eRule[4]<=e && e<eRule[5]){eFuzzy[0] = (eRule[5]-e)/(eRule[5]-eRule[4]);pe = 4;}else if(eRule[5]<=e && e<eRule[6]){eFuzzy[0] = (eRule[6]-e)/(eRule[6]-eRule[5]);pe = 5;}else{eFuzzy[0] =0.0;pe =5;}eFuzzy[1] =1.0 - eFuzzy[0];/*****误差变化隶属函数描述*****/if(ec<ecRule[0]){ecFuzzy[0] =1.0;pec = 0;else if(ecRule[0]<=ec && ec<ecRule[1]){ecFuzzy[0] = (ecRule[1] - ec)/(ecRule[1]-ecRule[0]);pec = 0 ;}else if(ecRule[1]<=ec && ec<ecRule[2]){ecFuzzy[0] = (ecRule[2] - ec)/(ecRule[2]-ecRule[1]);pec = 1;}else if(ecRule[2]<=ec && ec<ecRule[3]){ecFuzzy[0] = (ecRule[3] - ec)/(ecRule[3]-ecRule[2]);pec = 2 ;}else if(ecRule[3]<=ec && ec<ecRule[4]){ ecFuzzy[0] = (ecRule[4]-ec)/(ecRule[4]-ecRule[3]);pec=3;}else if(ecRule[4]<=ec && ec<ecRule[5]){ ecFuzzy[0] = (ecRule[5]-ec)/(ecRule[5]-ecRule[4]);pec=4;}else if(ecRule[5]<=ec && ec<ecRule[6]){ ecFuzzy[0] = (ecRule[6]-ec)/(ecRule[6]-ecRule[5]);pec=5;}else{ecFuzzy[0] =0.0;pec = 5;}ecFuzzy[1] = 1.0 - ecFuzzy[0];/***********查询模糊规则表*************/num =KdRule[pe][pec];KdFuzzy[num] += eFuzzy[0]*ecFuzzy[0];num =KdRule[pe][pec+1];KdFuzzy[num] += eFuzzy[0]*ecFuzzy[1];num =KdRule[pe+1][pec];KdFuzzy[num] += eFuzzy[1]*ecFuzzy[0];num =KdRule[pe+1][pec+1];KdFuzzy[num] += eFuzzy[1]*ecFuzzy[1];/********加权平均法解模糊********/Kd_calcu=KdFuzzy[0]*kdRule[0]+KdFuzzy[1]*kdRule[1]+KdFuzzy[2]*kdRule[ 2]+KdFuzzy[3]*kdRule[3];return(Kd_calcu);}/*****************************************函数功能:AD将采集到的温度进行转化********************************************/uint read_tlc2543(uchar port){static uchar PORT = 0;uchar Temp,i,k=0;uint AD_value=0;Temp = port;CS = 1;CLK = 0;Temp<<=4;CS = 0;while(1){for(i=0;i<8;i++){CLK = 0;if(Temp&0x80)SDI = 1;elseSDI = 0;AD_value<<=1;if(SDO)AD_value |= 0x01;CLK = 1;Temp<<=1;}for(i=8;i<12;i++){CLK = 0;AD_value<<=1;if(SDO)AD_value |= 0x01;delay_us(10);CLK = 1;}CLK = 0;CS = 1;if(PORT == port)break;else{Temp = port;Temp<<=4;delay_us(10);CS = 0;AD_value = 0;}k++;if(k>2){PORT = port;}}return AD_value;}float AD_deal(void){uint AD_value;float temp;AD_value = read_tlc2543(0x00);temp = AD_value*number;return temp;}/*********主函数**********/ void main(void){uchar AD_value=0;flag=0;flag_start=0;ENA=1;IN1=0;IN2=0;LCD_Init();LCD_display();Timer2_Init();while(1){if(flag_start==0){key_scan();Show_Num(13,1,3,S_temp);Show_Num(3,1,3,P_temp);}else if(flag_start==1){P_temp=AD_deal();Show_Num(3,1,3,P_temp);PID_Calculate();Kp=fuzzy_kp(Err/5,D_Err); //E量化因子5Ki=fuzzy_ki(Err/5,D_Err);Kd=fuzzy_kd(Err/5,D_Err);Show_Num(2,2,2,Kp);Show_Ki(Ki);Show_Num(14,2,2,Kd);key_scan();Show_Num(13,1,3,S_temp);}}}/***************定时器2中断**************/void timer2() interrupt 5{static uchar num1=0;TF2 = 0;num1++;if(num1<=U){if(flag==1){IN1 = 0;IN2 = 1;}else{IN1 = 1;IN2 = 0;}}elseENA=0;if(num1>PULSE){num1=0;ENA=1;}}。
汽轮机调速器的变结构模糊智能控制
取不同的模糊控制策略 。 文章分析了该控制器的结构、具体 实现 以及控制器参数的混沌优化。 仿真实验表 明该智 能控制器的实际效果良好。 关键 词 :汽轮机调速器 ;非线性控制 ;模糊控制 ;变结构 ;混沌优 化
中图分类号: P 7 T 23 文献标识码 : A 文章编号 : 0 -0 3 (0 8 1 —0 8 - 4 1 9 1 4 2 0 ) 1 0 6 0 0
a c dig t h o t l r r . i p p r a e c ie h tu t r ,m pe e t t n c or n o t e c n r o s Th s a e s d s r d t e s r c u e i lm n a i a d o er h b on
l
匐 化
包 艳
汽轮机调 速器 的变结构模糊智能控制
( 长沙学 院电子与通讯工程系 ,湖南 长沙 4 0 3 1 0) 0
摘
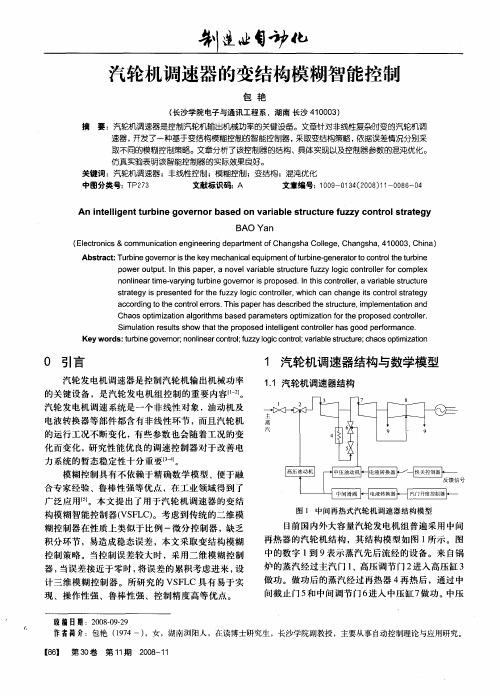
要 : 轮机调速器是控制汽轮机输出机械功率的关键 设备 。文章针 对非线性复杂 时变的汽轮机调 汽 速器 , 开发了一种基于变结构模糊控制的智能控制器 , 采取变结构策略 , 依据误差 情况分别采
目前 国内外 大容量 汽轮 发 电机 组普遍 采用 中 间
再热 器 的汽 轮机 结构 ,其 结构 模型如 图 1 所示 。图 中的数字 l 9 示蒸 汽先 后流 经 的设备 。来 自锅 到 表 炉 的蒸汽 经过 主汽 门 l 压调 节 门 2 、高 进入高 压缸 3 做功 。做功 后 的蒸汽 经过 再热 器 4 热 后 ,通 过 中 再 间截 止 门5 中间调 节 门6 入 中压 缸 7 功 。中压 和 进 做
基于模糊理论的自适应阈值实时DSP系统
第36卷,增刊红外与激光工程2007年9月V bl.36Su ppl em e n t l D f妇r ed a nd Las er Engi nee皿g Sep.2007基于模糊理论的自适应阈值实时D SP系统鲁剑锋L2,吴川2(1.中国科学院研究生院,北京100049;2冲国科学院长春光学精密机械与物理研究所,吉林长春130032)搐要:模糊集理论是一门新出现的理论,在图像处理、自动控制等方面已经得到了很大的应用,针对低对比度场景下,利用模糊理论及最大模糊熵值的原则找到最佳闽值,把目标从背景中分割出来,改进了已有的隶属函数,使自动阈值的选取过程大大缩短。
系统应用1'I公司的数字信号处理器1M s320C6416为核心,采用现场可编程门阵列FP G A分别作为图像预处理,经过对低对比度图像视频采用多种分割方法处理表明文中的D s P系统与算法切实可行。
关键词:数字信号处理器;模糊理论;自适应阈值;隶属函数中图分类号:TP391文献标识码:A文章编号:1007—2276(2007)增(探测与制导)一0294.05D es i gn of r eal-t i m e adapt i V e t hr e s hol di ng of f uz zy t heor y pr oces s i ngs ys t em based on di gi t a l s i gnal pr oc ess orL U J i an—fen91一,w U C huan2(1.G船dl Ia t e U n i V e硌i ty o f C hi nes e A ca de m y o f Sc i∞ce s,B e萄i119l O0039,(=hi n a;2.al柚gch岫妇t inl t c of opt i cs,鼬e M e ch阳i c s锄d Ph蜘i cs,c艇∞∞A cadc玎呵of sci∞ces,ch粕gch叩130032,a血∞A bs t豫ct:Fll zzy m eof y i s a new m eo巧t I l at i s f ou nd O n r ecenⅡy.A nd it has been us ed on m强y f i el dss uch a s i m a ge pr oces s i ng,aut om at i on.111t tl is paper f uzzy t he ory and m a)【i m um en咖py pr i nci pl e ar e appl i ed t o se l ec t m e t hres h01d V al ue f or gm y—l eV el i m age.I t us es TI’s T M S320C6416as山e c o r e pr o cessor’achi eV es t ll e i m a ge pr epr oces s i ng by f i e l d pr ogr am m abl e刚e ar I.ay(F PG A).The expe血nent r esu l t s show 慨i t i s us ef ul,and t l le pr opos ed appr o ach can se l ec t m e t}鹏s hol d aut om撕cal l y aI l d e彘ctiVely.K ey w O r ds:D i gi t al s i gna l pr oc es sor;F uzz y t l leor y;M axi I num f uzzy en缸D py;A d印t i veⅡl r esh01d m em ber s l l i p f unct i onO引言数字图像处理技术是在20世纪60年代以来出现的一门新兴学科,随着其发展相应的处理器也不断产生、进步,基于数字信号处理器(D SP)和可编程器件(FPG A、C H D)的处理平台为更新、更快的算法的实现提供了可能,从而使数字图像处理技术在军事、工业、医学等方面得到了极大的应用【l】。
财务预警模型
财务预警模型关键词:财务预警系统,模糊神经网络,基于案例模糊推理,生意失败预测。
1 导言生意失败预测(BFP),长期以来一直在融资以及信息技术的广泛研究,是一个特定的数据分析模型,这应该回答一些基本问题,如作为一个金融预警模型:什么是显着的特点,可以描述遇险和健康的公司吗?这些功能的意义,如何进行评估和预测认为呢?什么是每个功能的类型和可能的值是什么?什么是数据集需要事先解决可能发生的问题是什么?多少预测的准确性是至关重要的,它是如何可以达到?更重要的利益和实际是什么样的预测?要回答的特征选择问题,有许多研究纷纷推出不同的故障预测模型研究不同的功能集,在他们的模型。
其中,从财务报表编制的财务比率被认为是企业目前的表现比财务报表上被广泛接受的个别项目有更好的措施,因为它可以使财务报表的信息更具吸引力。
至于其他上述问题,获得适当的预测精度一直在这一领域最重要的成就,并有各种统计和人工智能技术,这是用来建立一个准确的故障预测。
其中,人工神经网络(ANN)已成为最流行的企业破产,由于其较高的预测精度预测技术之一。
然而,神经网络,并没有被应用广泛,在金融公司,因为它是一般人难以建立模型。
困难源于启发式设置许多参数。
此外,它通常是很难解释为什么它会产生一个特定的结果,即解释能力较差。
因此,有需要其他人工智能技术,具有良好的解释能力,以及较高的预测性能。
FNN与FCBR可能替代的人工神经网络,以纾缓上述限制,因为他们有能力以及合理准确地解释。
利用这种故障预测技术,似乎是在这一领域的一个新的和有趣的研究方向,是因为故障预测不仅仅是一个经典的分类,并作为一个实用的系统,它应该提供更多的信息,支持和引导决策者。
在当前的BFP研究,包括利用模糊神经网络和FCBR的BFP模型,预测的准确性是主要的焦点。
有研究缺乏的预测为基础的决策过程,以防止可能破产的决定。
提出的模型,它考虑到所有提到的问题,在一个系统化的方法,试图去通过后,预测下一步。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2、 模糊数学的产生与发展
2.1模糊数学的产生
1965年,L.A. Zadeh(扎德) 发表了文章《模糊集 》
(Fuzzy Sets,Information and Control, 8, 338-353 )
“事物的复杂性与精确性的矛盾是当代科学的一 个基本矛盾”,由此促使着模糊数学的产生和发展。 “模糊”并非坏事,在有些情况下它比精确更有 意义,会带来更好的效果,如模糊描述人的特征,对 人进行模糊综合评价。郑板桥讲“难得糊涂”,实际 上包含了难得模糊的哲理。
2.3
模糊数学的发展
1975年之前,发展缓慢;1980以后发展迅速; 1990-1999 Fuzzy Boom
• 杂志种类 1978年,Int. J. of Fuzzy Sets and Systems 每年1卷共340页,99年8卷每卷480页 Int. J. of Approximate Reasoning
2.2 基本思想
用属于程度代替属于或不属于。 某个人属于秃子的程度为0.8, 另一个人属于秃子的程 度为0.3等. 任何事物的发展都有一个从量变到质变的过程,这个 过程用经典数学很难描述,模糊数学的发明完成了这一使 命: (1)给数学“禁区”的各门学科,如社会、人文学科等 提供新的语言和工具; (2)使计算机能仿效人脑对复杂系统进行识别和判断, 提高自动化水平,使电脑更“聪明”。
3.2 隶属函数
特征函数 在经典集合论中,一个元素x和一个集合A之间的 关系只能有xA或者xA这两种情况。集合可以通过其 特征函数来刻划,每一个集合A都有一个特征函数A(x), 其定义如下:
每一个集合A都有一个特征函数A(x),其图形如 图1所示:
图1特征函数A(x) 图
例 设论域U = {x1 (140), x2 (150), x3 (160), x4 (170), x5 (180), x6 (190)}(单位:cm)表示人的身高, 那么U上的一个模糊集“高个子”(A)的隶属函数 A(x)可定义为
图2 一般情形下的特征函数图
3.3 模糊子集的表示
可确定U 的一个模糊子集A
μ A (x)称为A的隶属函数,μ A (xi)称为 元素xi的隶属度。当μ A (xi)=1时,则xi 完全属于模糊集A,当μ A (xi)=0则xi完 全不属于模糊集A.
例1 已知论域为实数集R,设A是“比0大 得多的所有实数”,A就是论域R上的一个 Fuzzy 集,且: A : R→[0 , 1] , x∈R 关于 A 的隶属度为:
EUFIT、NAFIP、Fuzzy-IEEE、IPMU
• 涉及学科 模糊代数,模糊拓扑,模糊逻辑,模糊分析, 模糊概率,模糊图论,模糊优化等模糊数学分支
分类、识别、评判、预测、控制、排序、选择;
人工智能、控制、决策、专家系统、医学、土木、 农业、气象、信息、经济、文学、音乐 • 模糊产品
洗衣机、摄象机、照相机、电饭锅、空调、电梯 •国内状况 1976年,潘学海,弗齐集合论,计算机应用及应用数学; 1980年,汪培庄,模糊数学简介,数学的实践与认识. 1981年,模糊数学创刊
―20岁左右”
原集合(年龄)
• {...., 17, 18, 19, 20, 21, 22, 23, ...}
―20岁左右”这个模糊集可以表示为:
• 0.8/18 + 0.9/19 + 1/20 + 0.9/21 + 0.8/12 隶属度[0,1] 集合元素
• 0.6/17+0.7/18+0.8/19+1/20+0.9/21+0.7/22 +0.6/23
0 x≤0
A(x)= 1/(1+(100/x2)) x>0
年轻”和“年老”是两个模糊概念,可 用Fuzzy集来描述它们。取年龄论城U =[0,200],设描述“年轻”和“年 老”的这两个Fuzzy集分别为Y和O, 年龄u属于Y及O的隶属度分别为:
Y (23)=l,O(80)=0.99;这意味着 23岁属于“年轻”的程度为100%, 80岁属年老”的程度为99%.
0 0 u 50 u 50 2 1 A(u) (1 ( ) ) 50 u 100 5
1
0 50
U 100
再如,B= “年轻”也是U的一个子集,只是不同的年龄段隶 属 于这一集合的程度不一样,查德给出它的隶属函数:
1 0 u 25 u 25 2 1 B(u ) (1 ( ) ) 25 u 100 5
2.4 为什么研究模糊数学
•复杂性要求 不相容原理 (Incompatibility Principle)
As the complexity of a system increases, our ability to make precise and yet significant statements about its behavior diminishes until a threshold is reached beyond which the precise and significance become mutually exclusive characteristics.
2、集合的基本运算 并集、交集、差集、补集。
3.1模糊子集
模糊集合 1、模糊集合:无明确边界的集合。 2、模糊集合的特点:把原来普通集合对类属、 性态的非此即彼的绝对属于或不属于的判定,转化为 对类属、性态做从0互1不同程度的相对判定。
★模糊子集:设给定论域U和一个资格函数把U 中间每个元素x和区间[0,1]中的一个数μ A(x) 结合起来。μ A(x)表示x在A中的资格的等级。此 处的A我们就说是U的一个模糊子集。
1 B(u)
0 25
50
U
共同特点:模糊概念的外延不清楚。 年轻、重、热、美、厚、薄、快、慢、大、小、 高、低、长、短、贵、贱、强、弱、软、硬、 阴天、多云、暴雨、清晨、礼品。 模糊概念导致模糊现象 模糊数学就是用数学方法研究模糊现象。 • 术语来源 Fuzzy: 毛绒绒的,边界不清楚的 模糊,不分明,弗齐,弗晰,勿晰
x 140 A( x) 190 140
x 100 A( x) 200 100
也可用Zadeh表示法:
0 0.2 0.4 0.6 0.8 1 A x1 x2 x3 x4 x5 x6 0.15 0.2 0.42 0.6 0.8 0.9 A x1 x2 x3 x4 x5 x6
1.1 从《伊索寓言》的故事开始
一个路人问一位智者,要走几小时才能到达某 地。智者默不作答,等过路人走了一小段路以 后,他才把那人叫回,答以时间……
• 赞成
说话要有根据 回答十分精确 说话要灵活处理 路人又没问精确时间
• 反对
―3小时左右”
模糊性
• 日常生活中,早已运用自如 • 科学分析中,理论却还未完善
还可用向量表示法: A = (0, 0.2, 0.4, 0.6, 0.8, 1). 另外,还可以在U上建立一个“矮个子”、 “中等个子”、“年轻人”、“中年人”等模糊 子集. 从上例可看出: (1) 一个有限论域可以有无限个模糊子集, 而经典子集是有限的; (2) 一个模糊子集的隶属函数的确定方法是 主观的. 隶属函数是模糊数学中最重要的概念之一, 模糊数学方法是在客观的基础上,特别强调主观 的方法.
Int. J. Fuzzy Mathematics
Int. J. Uncertainty, Fuzziness, knowledge-based Systems
IEEE 系列杂志
主要杂志25种,涉及模糊内容20,000余种
• 国际会议
IFSA (Int. Fuzzy Systems Association)
3.2 隶属函数
隶属函数
设给定论域 U , U 在闭区间 [0 , 1] 中的任一 映射μ A
3.2 隶属函数
模糊数学是将二值逻辑{0,1}拓广到可取 [0,1]闭区间上任意的无穷多个值的连续值逻辑。 因此,也必须把特征函数作适当的拓广,这就是隶 属函数μ(x),它满足: 0≤μ(x)≤1 (2) (1)式也可以记作μ(x)∈[0,1],一般情形下, 其图形如图2所示。
模糊概念用数学语言来说就是模糊集合。模糊 集合的基本思想是把经典集合中的绝对隶属关 系灵活化,用特征函数的语言来讲就是;元素 对“集合”的隶属度不再是局限于取0或1,而 是可以取从0到1。的任一数值。 模糊数学的几个概念: • 映射:在两个集合X、Y之间,如果有一个法 则f,使得对X中的每个元素x,在Y中都有唯 一元素y与之对应,则称f是X到Y的映射。 即:对每个x∈X都存在着唯一确定的元素y= f(x)∈Y与之对应.
模糊理论
• 模糊集,模糊逻辑,模糊数,...
历史
• 20c60s,奠定理论基础
L.A.Zadeh, ―Fuzzy Set‖, 1965.
荷兰,热水站,传统方法难以控制 日本,地铁列车自动运转,自来水厂净化处理
• 20c70s,广泛应用于控制领域
秃子悖论: 天下所有的人都是秃子
•设某人头发根数为n,当n=1(即该人头上只 有一根头发),显然该人一定是秃子,结论 正确; •若某人头发根数n=k时为为秃子;(归纳假 设) •那么当n=k+1 (即该人头上只比秃子多一根 头发), 当然该人亦为秃子。
•人工智能的要求
• 取得精确数据不可能或很困难 •没有必要获取精确数据 结语:
模糊数学的产生不仅形成了一门崭新的数学破了以二值 逻辑为基础的传统思维,使得模糊推理成为严格 的数学方法。随着模糊数学的发展,模糊理论和 模糊技术将对于人类社会的进步发挥更大的作用。