GPS软件接收机中微弱信号捕获算法研究
一种GPS软件接收机微弱信号捕获方法
F requency Approach [ M ] . B erlin : B irkh user Bosteon Base, l 2007: 10 35. VAN NEE D J R, COENEN A J R M. N ew Fast GPS Code A cqu isition T echn ique U sing FFT [ J]. E lectronics L etters, 1991, 27( 2): 158 160. AKOP I AN D. F ast FFT Based GPS Sate llite A cqu is ition M ethods[ J]. I EEE, 2005, 152( 4) : 277 286 . WU Fa lin, Z HANG K efe, i YASUDA A. GPS S igna lA cqu i sition and T racking U sing Soft w are G PS R ece iver [ J ]. IEEE, 2005, 152( 2): 843 846. GUO Ji m ing , W ANG W e , i CHAO Baichong . A Ne w GN SS So ftwa re R ece iver S igna l A cqu isition M ethod R esearch Based on Am b iguity Function [ C ] ∋ ION GN SS 2007. F ortW orth, T exas , U SA: [ s . n . ], 2007: 231 235. Jam es Bao Y en T su . i F undamenta ls of G loba l P ositioning Syste m R ece ivers : A So ftw are A pproach [ M ]. [ S. . l ]: John W iley & Sons Inc , 2005: 175 215 . [ 7] 汪 伟 , G PS 软 件 接 收 机 信 号 捕 获 和 跟 踪 算 法 研 究 [ D ]. 武汉 : 武汉 大学 , 2008: 73 80 .
GPS弱信号的捕获与跟踪的算法研究

重庆大学硕士学位论文GPS弱信号的捕获与跟踪的算法研究姓名:***申请学位级别:硕士专业:信号与信息处理指导教师:***20120531重庆大学硕士学位论文中文摘要摘要全球卫星定位系统能全天候地、实时地为人们提供位置、测速和授时服务。
但是,在城市街道、森林、峡谷和室内环境等受到阻挡条件下,GPS信号功率受到极大的损耗。
普通的GPS接收机无法在这样弱信号条件下正常工作,因此,高灵敏GPS接收机技术逐渐成为GPS技术发展与应用领域的研究热点之一。
GPS信号的捕获与跟踪技术是GPS接收机中的关键技术,因此,开展GPS弱信号捕获与跟踪算法的研究具有良好的学术价值和重要的理论意义。
本文首先阐述了GPS信号由导航数据、C/A码和载波构成,并说明C/A码的高自相关性和低互相关性是GPS信号成功捕获的基础。
由于多普勒的影响,GPS信号捕获搜索的频率范围为.10kHz~10kHz。
接着分析了单次相干累加可用的最大数据长度和多普勒频移步长对信号捕获的影响。
研究与分析了唐搜索检测器、相干一非相干累加和差分相干累加捕获算法,并用matlab仿真了在不同的4和B条件时,唐搜索检测器捕获算法中捕获灵敏度和平均滞留次数的对应关系,仿真分析了相干.非相干累加算法和差分相干累加算法的捕获效果。
本文对唐搜索检测器算法中的检测统计变量进行改变,将相邻相干积分平方之和作为新的检测统计变量,较好地提高了信号捕获的灵敏度,可是增加了每个单元的平均驻留次数,延长了捕获时间。
采用二阶锁频环辅助三阶锁相环作为载波跟踪环结构,能较好地跟踪载噪比为30dB/Hz和相对加速度为129的低载噪比高动态GPS信号,并能正确地解调出导航数据。
关键词:GPS弱信号,捕获,跟踪,锁相环,锁频环ABSTRACTG10balpositioningsystemcallsupplytheservicewhichincludesposition,velocityandSOonandtimeforpeople.Butinthecitystreets,forest,gorge,indoorenvironmentreceiversi印a1beingobstructed,GPSsignallevelsuffersagreatloss.TheordinaryGPSsensitivityGPScannotworl(properlyinsuchaweaksignalconditions.Therefore,highreceivertechnologyhasgraduallybecomeoneofthehotspotsofGPStechnologyfieldtoday.Atthesametime,thesignaldevelopmentandapplicationofresearchinthethekeytechnologiesoftheGPSreceiveracquisitionandtrackingtechnologyareandtrackingalgorithmoftechnology,therefore,developingtheresearchofacquisitionGPSweaksignalhasagoodacademicvalueandimportanttheoreticalsignificance·isconstitutedbyFirstlⅥthispaperdescirbestheconstitutionofGPSsignal,whichautocorrelationandnavigationdata,C/Acodeandcarrier,anditisthatC/Acodehighsignal.Becauseofthelowcross.correlationisthebasisofsuccessfulcaptureofGPSimpactofDoppler,thefrequencyrangeoftheGPSsignalacquisitionsearchIS.10kHz~10kHz.ThenanalyzetheimpactofGPSsignalacquisitionwhichisabouttheaVailablemaxim啪datalengthandthestepofDopplerfrequency.ResearchandanalyzetheacquisitionalgorithmofTongsearchdetectors,coherent—noncoherentaccumulationanddifferentialcoherentaccumulation,andsimulatetherelationshipsearchbetweenthesensitivityofacquisitionandthenumberofmeanresidenceofTongdetectorsalgorithmunderdifferentconditionofAandBbytheMatlabsoftware,accumulationalgorithmandandsimulatecaptureeffectofcoherent-noncoherentdifferentialcoherentaccumulationalgorithm.algorithmaimprovementInthispaper,maketheoriginaltheTongsearchdetectorwllichaddstheadjacentthesquareofcoherentintegralasanewstatisticaltestvariable,signal,butincreaseaveragedwellnumbersOimprovetheacquisitionsensitivityofGPSassistanceofeachunit,andextendthetimeofGPSsignalacquisition.Adopt3mPLLonof2naFLLforthestmc眦ofcarriertrackingloop,anditispossibletotracktheGPSsignalwhosecartiertonoiseratiois30dB/Hzandaccelerationis129lowcarriertodata·noiseranoandhighdynamicGPSsignal,andcorrectlydemodulatethenavigationlockedKeyword:GPSweaksignal,acquisition,tracking,phaselockedloop,frequencyloopII1绪论1.1课题的研究背景及意义全球定位系统(GlobalPositioningSystem,GPS)是一个基于人造卫星、面向全球、为人们提供全天候的实时、定时和连续、精确定位系统【l儿21。
GPS接收机相关器捕获算法研究
ma t e d,t o me e t t h e n e e d s o f he t t r a c k c h a n n e l s .T h i s me t h o d i s p r o v e d f e a s i b l y i n t h e o y .T r h e s i mu l a t i o n s h o w s t h a t t h e a l g o i r t h m c a n r e a l i z e t h e q u i c k c a p t u r e o f s i na g l s .
GPS软件接收机中信号捕获、跟踪算法的研究与实现中期报告
GPS软件接收机中信号捕获、跟踪算法的研究与实现中期报告一、研究背景随着GPS技术的不断发展,GPS接收机在各个领域得到广泛应用。
在GPS应用中,信号捕获、跟踪算法是GPS接收机的重要组成部分,它决定了接收机的性能和精度。
因此,对GPS信号捕获、跟踪算法的研究和实现具有重要意义。
二、研究现状目前,GPS信号捕获、跟踪算法主要分为两类:基于时域的算法和基于频域的算法。
其中,时域算法有单点搜索法、Hilbert-Huang 变换法等,频域算法则有二次互相关法、离散小波变换法等。
三、研究内容本研究将主要研究和实现以下内容:1.分析GPS信号的数学模型和特点,理解GPS信号的结构和原理;2.分析GPS信号的捕获、跟踪过程,研究GPS信号处理的基本方法;3.研究和实现不同的信号捕获、跟踪算法,包括多点搜索法、Costas 环路跟踪法、相位锁定环路跟踪法等;4.对比不同算法的性能和精度,分析各自的优点和适用范围;5.在基于FPGA的GPS软件接收机中实现上述算法,并进行性能测试和验证。
四、研究计划本研究计划分为以下阶段:1.阅读有关GPS信号处理和算法的文献,理解GPS信号处理的基本原理(已完成);2.选定不同的信号捕获、跟踪算法,进行分析和比较(正在进行);3.在Matlab环境下实现各种算法,并进行性能测试;4.基于FPGA实现GPS软件接收机,并将各种算法移植到硬件平台上;5.对比硬件实现和软件实现的性能和精度,进行实验验证并撰写论文。
五、初步结论本研究通过对GPS信号捕获、跟踪算法的研究和实现,可以提高GPS软件接收机的性能和精度,对应用于军事、航空、航海、交通等领域具有重要意义。
同时,该研究还可以为其他卫星导航系统的信号处理提供借鉴和参考依据。
微弱GPS信号差分快速捕获算法
当前 G s作 为 全 球 性 卫 星 导 航 系 统 在 各 领 域 的 应 用 受 P
仿 真 的 数 学 模 型 为[ 2 1 。
Ⅳ
到 普 遍 关 注 ,尤 其 是 在 弱 信 号 环 境 下 的接 收 定 位 技 术 研 究 , 受 到 紧 急救 援 和 军 事 作 战 需 求 的刺 激 已经 成 为研 究 热 点 , 其 中 的高 灵敏 度 接 收 技 术 , 于 不 受 环 境 和 条 件 的限 制 尤 为 受 由 到 重 视 。在 高灵 敏 度 G S接 收 机 中 , 于 信 号 的 捕 获 处 在 基 P 由 带 处 理 的最 前 端 . 此 高 效 的 微 弱 G S信 号捕 获 算 法 是 提 高 因 P
v ld t ft lort ai iyo a g i hm. he
Ke r s GP a i n l c u s in;d f r n e a c mu ain y wo d : S we k s a ;a q i to g i i e e c c u lt f o
Ab t a t sr c :W e k GP in la q ii o lo t m s t e p a t a e e h o o is o i h s n i v t S r c i e ,b t a S s a c u st n a g r h i h r ci l k y t c n l ge f h g e st i GP e e v r u g i i c i y u u l h i n c u lt n t c n lg f mp o i g GP in c u st n s n i v t l c n u t f i . h o g s al t e sg a a c mu ai e h o o yo rv n S s a a q ii o e s ii wi o s me a l me T r u h y l o i gl i t y l oot t e a ay i o h u r n a in l a c mu a in t c n lg n a t r g ag r h h n lss f t e c re twe k sg a c u lt e h oo y a d c pu n l o t m,t e p p r p tfr r h a t o i i h a e u owa d t e fs a q i t n a g rt m fw a S sg a b sn i e e ta c u lt n o h a i o u c u s i l o h o e k GP in l y u ig df r n ila c mu ai n t e b ss fs mmi g“ t a v n a e n io i o n p i d a t g sa d s ds d a tg s h lo t m s v rf d t r u h s l t n p roma c n h cu ls mp ig d t a o f e h ia v n a e .T e ag r h i e i h o g i ai e fr n e a d t e a ta a l aa h s c n r d t e i i e mu o n i m
GPS软件接收机微弱信号捕获算法研究
上海 2 0 3 ) 0 2 3 (. 1 上海交通 大学空天科学技术研 究院 上 海 2 0 3 ; 0 0 0 2 上 海伽 利略导航有 限公 司 .
摘 要 :捕获是 GP 接收机信 号处ห้องสมุดไป่ตู้ 中的关键 部分 , S 在微 弱信号情况下 , 传统方法不 能很好 地捕获到卫星信号 。 本文 将介绍一种新 型捕获方法 一 批 式捕获法来 取代传统 的 F T相关搜索 法 , 一 F 为高灵敏 度 GP S软 件接 收机提供理论 依
Kewo d : go a o io ig s se ( y rs lb lp st nn y tm GPS ;we k sg a c ust n;bo k aq iio i ) a in l q iio a i lc c ust n;FF sa c i T e r h
2 B Hz 9d - 的微弱信号 , 能有效避免 由导航 数据位 翻转造成 的误捕获 。 并 关键词 :全球定位 系统 ; 弱信 号捕获 ; 式捕获 ;F T搜 索 微 批 F
中图 分 类 号 :TN96 1 7 . 文 献 标 识 码 :A
Al o ihm o a sg a c iii n i PS s fwa e r c i e g rt f rwe k i n la qu sto n G o t r e ev r
维普资讯
…
剁
E TN MSEN LY L RI子 测MT EN0 E 0 E E 术OG C 电 R TH C A 量技 C U
第85期 2卷月 0第 3 5 0 1 年
GP S软 件 接 收 机 微 弱 信 号 捕 获 算 研 究 * 法
据。 根据 GP S信号 的特征 , 利用软件模 拟出各种信 噪比数值的数据 , 别采用 以上 2 分 种方 法对 其进行捕获仿真 。 仿真结 果表 明 , 传统 方法 仅 能捕 获到 信 噪 比低 至 4 B Hz的信 号 ; 2d - 而批 式 捕获 法 能 够在 较 短 时间 内捕 获 到信 噪 比低 至
软件GPS接收机捕获算法的研究
A t y o q iii n Alo ih o o t r PS Re ev r S ud fAc u sto g rt m f r S fwa e G c ie
W ANG n L AN o—wa g Me g, I Ba n
pe oma e. Afe h n y i fte GPS sg a o fg r to f r r nc trt e a a sso h l i lc n iu ain, ti ril ie h i ain ft n h s atce gv st e smulto o he GPS sg a . i 1 n
摘要 : 数字信号捕获是软件 G S接收机 的重要组成部分 , P 同时也影 响软件 G S接收机的工作性能指标 。通过对 G S信 号结 P P 构的分析后 , 通过对 G S导航信号进行仿真 , P 分别在时域和频域范围对信号搜索捕获进行了算法仿真 , 根据信号搜索捕了分析和 比较 , 同捕获方法各有优 点, 不 针对不 同的情况应采用不 同 的算法或者对不 同的算法进行适 当的组合以实现快速捕获的 目的。 关键词 : 全球定位 系统 ; 软件接 收机 ; 捕获 ; 快速傅里叶变换
信号的搜索捕获过程的仿 真 , 为进一步 的软件 G S P 接收机工
程 实 现工 作 奠 定 了一 定 的 基础 。
件方式能更好地理解 接收机 的功能 。相对 传统 的基于硬件
的 G S接收机而言 , P 软件 G S接收 机具 有更好 的灵 活性 , P 扩
展性 和经 济 性 。
2 GP S信 号结构
号 较 弱 的情 况 下 , 对信 号 捕 获 有 一 定 影 响 。通 过 本 文 对 G S P
GPS信号捕获算法的研究
GPS信号捕获算法的研究吴勇【摘要】GPS信号的捕获是GPS接收机的核心模块,它是基于码相位和多普勒频移二维搜索的过程。
对于捕获模块,通常采用串行搜索算法和并行频域搜索算法。
探讨几种算法的原理并分析其相应缺陷,并指出对GPS弱信号捕获的性能优良算法。
%GPS signal acquisition is a hard core in a GPS receiver and is the two-dimension process of the search about the code delay and Doppler frequency.For acquisition,serial algorithms and parallel frequency of the search are usually adopted.The paper discusses the principle of algorithms and analyzes the defect of algorithms.According to the analysis of algorithms,the new algorithms about advanced performance is put fowarel and the new orientation of the GPS weak signal research is proposed.【期刊名称】《重庆科技学院学报(自然科学版)》【年(卷),期】2011(013)004【总页数】3页(P177-179)【关键词】GPS信号;扩频;捕获【作者】吴勇【作者单位】重庆大学,重庆400044【正文语种】中文【中图分类】TN964目前,全球定位系统(Global Positioning System,GPS)在军事和民用方面得到了越来越广泛的运用,其目的是为陆、海、空三大领域提供实时、全天候和全球性的导航服务。
微弱GPS信号捕获算法研究
1、 引 言
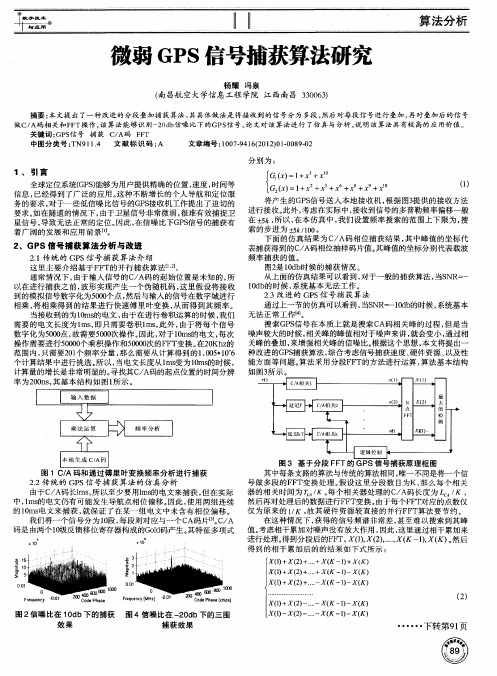
全球定位系统(P ) G S能够为用户提供精确 的位置 , 速度 , 间等 时 f =1 X + X + l1 1 + + + + ’ X G 。 信息 , 已经得 到了广泛的应用 。 这种不断增长的个人导航和定位服 将产生 的G S P 信号送入本地接 收机 , 根据 图3 提供 的接 收方法 务的要求 , 对于一些低信噪 比信 号的G S 收机工作提出 了迫切的 P接 此外 , 考虑在实 际中, 接收到信号的多普勒频率偏移一般 要求。 如在隧道 的情况 下, 由于卫星信号非常微弱 , 很难有 效捕 捉卫 进行接 收。 5 所 在 我们设置频率搜索的范 围上下 限为 , 搜 星信号 , 致无法正常的定位。 导 因此 , 信 噪 比 下G S 号 的捕 获 有 在 + k, 以, 本仿真 中, 在 P信 索 的 步 进 为 +k 10 5 /0 。 着广 阔的发展 和应用前 景…。 下面的仿真结果为 C A码相位捕获结 果 , 中峰值 的坐标代 / 其 2 、GP S信 号 捕 获 算 法 分 析 与 改进 表捕 获 得 到 的 C A 相 位 抽 样 码 片值 。 /码 其峰 值 的 坐 标 分 别代 表 载 波 频 率 捕 获 的值 。 21 统的 G s 号捕 获 算 法介 绍 .传 P信 图2 1d 时 候 的捕 获 情 况 。 是 0b 这 里 主 要 介 绍 基 于 F T的 并 行 捕 获 算 法 [ 】 F 1, ’ 2 从上面的仿真结果可 以看到 , 对于一般 的捕获算法 , NR= 当S - 通 常 情 况 下 , 于 输 入 信 号 的 C A 的起 始 位 置 是 未 知 的 , 由 / 码 所 0b 系统基本无法 工作。 以在 进行捕获之前 , 波形实现产生一个伪随机码 , 里假设将接收 1d 的时候 , 这 23改进 的 GP . S信 号捕 获 算法 到的模拟信号数字化为50 @点 , 00 然后与输入 的信号在数字域进行 相乘 , 将相 乘得到的结果 进行快速傅里 叶变换 , 而得到其频率 。 从 通过上一节 的仿真可 以看到 , NR -1d 的时候 , 当S = 0b 系统基本 4 1 当接收到 的为 lis o 的电文 , n 由于在进行 卷积运算 的时候 , 我们 无 法 正 常 工 作 【。 搜索G S P 信号在本质上就 是搜索C A码相 关峰的过程 , 但是 当 需 要 的 电文 长度 为 l , ms 即只 需 要 卷 积 l , 外 , ms此 由于 将 每 个 信 号 相关峰的峰值相对于噪声来讲 , 会变小 , 就 通过相 数 字 化 为 50 点 , 0 0 故需 要 50 次 操 作 。 此 , 于 1ms 电 文 , 次 噪声较大的时候 , 00 因 对 0 的 每 来增强相关峰的信噪比。 根据这个思想 , 本文将提 出一 操作需要进行5 00 0 0 个乘积操作和5 00 0 0 次的F T变换 。 0 z F 在2 Kh 的 关峰 的叠加 , 范 围 内 , 需 要 2 1 频 率 分 量 , 么 需要 从计 算得 到 的 10 5 1 种改进 的G S 只 0个 那 .0 *06 P 捕获算法 , 综合考虑信号捕获速 度、 硬件资源、 以及性 个计 算结果 中进行挑选 。 以, 电文长度从1 变为1ms 所 当 ms 0 的时候 , 能方面等问题 。 算法采用分段F T F 的方法进行运算 , 算法基 本结 构 计算量的增长是非常 明显 的。 找其C A码的起 点位置的时间分辨 如 图 3 示 。 寻 / N 率 为2 0 s其基 本结构如 图1 0n ,。 G
新的微弱GPS信号快速捕获算法
新的微弱GPS信号快速捕获算法
当前GPS作为全球性卫星导航系统的应用范围越来越广,而其在弱信号环境下的接收技术研究,受到紧急救援和未来军事需求的刺激已经成为研究热点。
其中,高灵敏度接收技术在GPS接收机中的应用,由于不受环境和条件的限制尤为受到重视。
在高灵敏度GPS接收机中,由于捕获算法处在基带处理的最前端,因此高效的微弱GPS信号捕获算法是提高高灵敏度GPS 接收机性能的关键。
通常的弱信号环境比室外信号强度低约20~30 dB,载噪比小于28 dB-Hz,故被视为弱信号,高灵敏度GPS接收机主要通过信号处理算法来获得高的信号处理增益。
本文分析了主要信号累积技术的优缺点,讨论了弱信号环境下GPS信号检测值的概率统计分布特性,在此基础上结合快速相干累积算法,提出了利用帧同步信息的微弱GPS信号捕获算法,并分析了其可行性。
通过仿真验证和实际数据测试,证明算法可行有效。
1 GPS信号模型及特性
实际到达接收机的中频数字信号中包含着L1及L2载波的完整信息,在弱信号的C/A码捕获研究中,忽略P码及L2载波进行分析,可采用。
GPS软件接收机捕获方法研究

p a n h u p a ai a h a i e k a d t es b— e k r to, tt e s me tme,h p cfcse sae p e e e t es e i t p r r s ntd.Th o g h n l sso h e lGPS i r u h t ea ay i ft er a I i n 1 x e i n a e u t h w h tt T— a e F sg a .e p rme tlr s l s o t a he FF b s d GPS sg a c u i o n s in la q st n a d FFT fe u n y d ma n meh d i q e c — o i t o r a e v r f cie t b an te fn e u n y,h s i , a a t e q ik y a d a c rt l S o me tt e rqur — r e y ef tv o o t i h e f q e c t i s c n c pur u c l n c u aey, O t e h e ie e i r
me t fGP ot r e e v r ns o S s fwa e r c ie . K e r s: S;i n l F fe u n y; T ;o wa ee e v r y wo d GP sg a ;I q e c FF s f r r c ie r l
微弱GPS信号的捕获与跟踪处理的研究与实现

学位论文作者签名: 日期: 年 月 日
上海交通大学硕士学位论文
第一章 绪论
第一章 绪论
1.1 引言
“导航的定义是使运载体或人员从一个地方到另一个地方的科学” 。在日常 生活中,我们每一个人都会进行某种形式的导航。而在一些情况下,我们需要更 精确的位置、预期的航向或到达期望目的地所需的时间。此时,便要使用所谓的 无线电导航装置。它利用多个已知位置的无线电装置的信号来确定某一点的位 置。 GPS(Global Positioning System,全球定位系统)[1][2]即为一种无线电导航系 统。它是美国在上世纪 70 年代开始研制的高精度的星基导航定位系统,能全天 候地向全球范围内具有适当接收设备的用户提供精确、 连续的三位位置和速度信 息,并具有良好的抗干扰性和保密性。 GPS 系统由卫星星座、 地面控制/监测网络和用户接收设备组成。 标称的 GPS 卫星星座 24 颗卫星组成,均匀分布在 6 个轨道平面上。分布在世界各地的地面 控制/监视网时刻监视着卫星的健康与状态,并对 GPS 卫星提供实时的检测、指 挥和控制。其主要由主控站、L 波段检测站和 S 波段地面天线组成。用户接收设 备,即 GPS 信号接收机,用来处理 GPS 信号,并能解算出用户所需的导航信息。 GPS 系统提供了标准定位服务(SPS) 和精密定位服务(PPS) 两种不同的服务。 其中前者提供给民用,而后者主要由美国军方使用。SPS 对全世界的所有用户均 是免费可用的, 而且在 2000 年 1 月, 美国政府取消了 SPS 服务的选择可用性(SA) 政策,使得 SPS 的定位精度大为提高。目前这种服务提供的预测精度为:在水 平面内,优于 13m(95%); 在垂直平面内, 22m(95%) 以内( U.S. Department of Defense, Standard Positioning System Performance Specification, Oct 2001)[1]。随 着大规模集成电路技术飞速发展,基于 GPS 系统的导航设备运用越来越广泛, 在民用导航领域一枝独秀,并拥有着非常广阔的发展前景。s designed. A piece of development board called DE2 with FPGA chip produced by Altera is used. This circuit can realize the conventional acquisition algorithm and it also has nice real-time performance. This realized module lays solid foundation of subsequent work and provides an important module. The emphasis of this thesis is weak GPS signal tracking. All algorithms in this thesis are based on Kalman filtering theory. And different Kalman filter models are used to replace the traditional tracking loops including PLL and DLL to obtain higher sensitivity and precision. This thesis proposes two kind algorithms. First, a square-root filter with Potter algorithm is implemented to alleviate round-off errors. And square process is called after accumulation to remove the unknown navigation bit. At last this algorithm introduces incoherent integration to strengthen the signal and restrain the noise effectively. The second algorithm uses another form of square-root Kalman filter, and improves the filter model with a dual Kalman filter, which reduces computational cost with high efficiency. This algorithm introduces Beyesian estimation theory to deal with the navigation bit of every accumulation period. This thesis uses a kind of software to generate GPS IF signals to make simulations. And the simulation results indicates that the first algorithm can track signals as weak as 17dB-Hz but the precision is not ideal and it costs a little more time. The second algorithm can track signal as weak as 19dB-Hz. And its
GPS信号捕获算法的研究

GPS信号捕获算法的研究全球导航卫星系统(GNSS)作为一种重要的定位技术,广泛应用于各个领域,如汽车导航、无人机导航、船舶导航等。
但是,由于 GPS 信号在空间传输过程中会受到多种干扰和衰减,因此接收机需要具备强大的信号捕获算法。
本文将介绍 GPS 信号捕获算法的研究。
一、 GPS 信号的捕获GPS 信号捕获是指接收机在接收到 GPS 信号前,需要搜索是否存在某个卫星的信号,并在搜索到信号后,对其进行跟踪。
GPS 信号捕获过程包括三个主要的步骤:初步搜索、细搜索和码捕获。
1. 初步搜索初步搜索是指在搜索到信号的卫星之前,接收机需要搜索整个码相位空间,以确定是否存在一个信号。
在初步搜索中,接收机需要依次搜索所有可能的卫星并计算与之相关的码延时。
由于 GPS 信号的码相位空间非常大,因此初步搜索时间较长。
2. 细搜索细搜索是指一旦确定存在一个卫星的信号,接收机需要在该卫星的码相位空间上进行细致的搜索,以确定其码偏移。
与初步搜索不同的是,细搜索中接收机只需对码相位空间中的一小部分进行搜索,以加快搜索速度。
3. 码捕获码捕获是指接收机在确定卫星信号的码偏移后,对码进行捕获,并进入跟踪模式。
在码捕获中,接收机对接收到的信号进行解调,以分离出来自于卫星的码信号,并与接收机本地生成的码进行匹配以进行跟踪。
二、 GPS 信号捕获算法的研究为了提高 GPS 信号的捕获速度和准确性,许多学者进行了广泛的研究。
这些研究主要围绕以下三个方面展开。
1. 初步搜索算法初步搜索算法是 GPS 信号捕获中最耗时的环节。
为了加快初步搜索速度,常用的方法包括并行搜索、局部搜索和二进制搜索。
并行搜索是指将搜索任务分拆成多个子任务并在多个通道上同时执行,以缩短搜索时间。
局部搜索是指在初步搜索过程中,在预先确定的窗口范围内进行搜索,以加快搜索速度。
二进制搜索是指将搜索空间等分为两个部分并依次执行,以减小搜索时间。
2. 细搜索算法细搜索算法的目标是尽可能缩短搜索时间并降低搜索误差。
GPS接收机捕获算法的研究

GPS接收机捕获算法的研究【摘要】信号捕获是全球定位系统(global positioning syetem,GPS)接收机的关键技术,本文对GPS中的串行、匹配滤波和并行伪码相位三种捕获算法进行了理论分析,同时针对捕获算法的捕获时间、捕获运算量、占用资源以及捕获结果进行了对比分析和仿真验证。
仿真分析表明:三种捕获算法均能有效捕获GPS信号,它们各有优缺点但并行伪码相位捕获方案更适合大规模推广,使用价值高。
【关键词】全球定位系统(GPS);捕获算法;串行捕获;匹配滤波;并行伪码相位1.前言GPS接收机内的信号捕获可认为是一个二维(即伪随机码PRN载波频率和伪随机码相位)的搜索,为了估算某个卫星信号的载波频率和码相位这2个参数值。
信号捕获主要方法是对伪随机码进行相关操作,这种相关操作有两种实现方式,第一种是串行搜索,即通过数字相关器对码相位和多普勒频移在时域内实现;第二种是并行搜索,即通过FFT数字信号处理技术在频域内间接来实最快加到几月现。
常用的捕获方案有串行捕获方案、匹配滤波器方案、C/A码循环相关方案。
本文对以上三种捕获方案分别进行理论分析,同时对比了3种方案的捕获性能,得到了一些具有一定参考价值的结论。
2.捕获的基本原理捕获的首要目的是确定对接收机当前位置的可见卫星,进而计算可见卫星的频率和C/A码相位信息。
捕获的实质是进行二维搜索,码相位通常以1/2码片的增量进行搜索,每个码相位搜索增量对应一个码的分格;同理多普勒频移通常以500Hz的增量进行搜索,每个多普勒频移的增量对应一个多普勒频率分格。
捕获系统通常以一定的搜索策略沿着一个方向对整个搜索空间进行搜索,当输入信号和本地复制信号同步时,捕获系统就能得到一个相关峰,如果相关峰超过信号捕获门限值,那么就能判断卫星信号存在,即可求得所捕获卫星的多普勒频移和码相位的初步估值。
3.捕获方案3.1 串行捕获方案串行捕获算法是最为通用的一种捕获算法。
GPS软件接收机捕获算法
循环相关捕获算法利用 FFT 将码相位搜捕并行[6],减少了搜索次数,提高了整体速度。将需要搜捕的频率范围等分
成若干个频率段,在待搜索的每段频率上面只需要搜索一次就可以确定 C/A 码初始相位,即将二维搜索转化为一维搜索,
其算法框图如图 3 所示。 长度为 N 的有限长序列 x(n)(GPS 输入信号)的离散傅立叶变换为[7]:
硬件部分
出。实现信号处理的软件平台可以是 DSP(Digital Signal Processing)芯片,也可以是通用的 PC 机。
传统的 GPS 接收机捕获和跟踪部分是使用 ASIC 技术来实现的,预先设计的跟踪通道、相关器和控制
导航解算
获得卫星星
跟踪
捕获
图 1 GPS 软件接收机架构 Fig.1 Structure of GPS software receiver
− j2πkn / N
=
N −1
∑
x(m)e
j2
πkm
/
N
N -1
∑
y(n +
m)
− j2πk (n+m) / N = X * (k )Y (k )
n=0 m=0
m=0
n=0
(3)
适用于GPS软件接收机的弱信号捕获方法
适用于GPS软件接收机的弱信号捕获方法黎山;易清明;陈庆;石敏【期刊名称】《计算机应用》【年(卷),期】2012(32)3【摘要】For high sensitivity and operation efficiency in weak signal acquisition of Global Positioning System (CPS) software receiver, a differential coherent accumulated acquisition algorithm based on Fast Fourier Transform ( FFT) was proposed. The limitation of coherent integration time was overcome by block accumulation of demodulated GPS intermediate frequency data. Based on FFT frequency shift characteristics, a Doppler circular frequency search was used to achieve low computation instead of frequency compensation search. The loss in frequency was resolved by different down conversions. Compared to the original incoherent accumulation, Signal-to-Noise Ratio ( SNR) was improved by differential coherent accumulation of coherent results. The weak signal in a - 39 dB poor SNR environment was successfully acquired in experiments. High sensitivity and operation efficiency of the proposed algorithm were confirmed by the experimental results.%为了解决全球定位系统(GPS)软件接收机中弱信号捕获存在灵敏度和运算效率低的问题,提出了一种基于快速傅里叶变换(FFT)改进的差分相干累积算法.通过对去载波后的中频信号进行块累加处理,解决了相干积分时间的限制;根据FFT频移特性,采用多普勒圆周移位搜索替代频率补偿搜索,减少了FFT运算量;同时采用了不同的下变频,降低了频域分量间的损耗;对相干积分结果进行了差分相干累积,相对于传统的非相干累积,提高了信噪比.实验结果表明,该算法在- 39 dB的低信噪比环境下仍能捕获到所有微弱信号,具有较高的灵敏度和运算效率.【总页数】4页(P816-818,822)【作者】黎山;易清明;陈庆;石敏【作者单位】暨南大学电子工程系,广州510632;暨南大学电子工程系,广州510632;暨南大学电子工程系,广州510632;暨南大学电子工程系,广州510632【正文语种】中文【中图分类】TP393;P228.4;TP391【相关文献】1.GPS软件接收机中微弱信号捕获算法研究 [J], 李建伟;严丽云2.基于GPS软件接收机平台的弱信号捕获算法研究 [J], 苗剑峰;周贵荣;赵媛媛3.基于半比特交替和FFT组合的GPS软件接收机弱信号捕获算法 [J], 李寅寅;徐晓苏;刘锡祥4.GPS软件接收机中一种新的弱信号捕获算法 [J], 李源明;张波;李署坚;张彦仲5.GPS软件接收机微弱信号捕获算法研究 [J], 翟传润;张婧因版权原因,仅展示原文概要,查看原文内容请购买。
GPS微弱信号捕获算法
GPS微弱信号捕获算法
蔡秀雄;刘瑞芹;张凤元
【期刊名称】《火力与指挥控制》
【年(卷),期】2009(034)008
【摘要】捕获是GPS接收机信号处理中的关键部分,在微弱信号情况下,FFT快速捕获等传统方法不能很好地捕获到卫星信号,将采用一种改进的方法--相关积分与批式捕获相结合的方法进行捕获研究.并对一组GPS实测数据信息,分别采用以上两种方法对其进行捕获仿真.结果显示,采用改进的方法捕获到了较微弱的GPS 信号,提高了接收机的灵敏度,并能有效避免由导航数据位翻转造成的误捕获.
【总页数】3页(P105-107)
【作者】蔡秀雄;刘瑞芹;张凤元
【作者单位】北京化工大学信息科学与技术学院,北京,100029;北京化工大学信息科学与技术学院,北京,100029;北京化工大学信息科学与技术学院,北京,100029【正文语种】中文
【中图分类】TN976.1
【相关文献】
1.一种改进的GPS微弱信号捕获算法 [J], 杨英杰;钦鹏明
2.微弱GPS信号捕获算法研究 [J], 杨耀;冯泉
3.微弱GPS信号捕获算法研究 [J], 杨耀;冯泉
4.基于小波变换的GPS微弱信号捕获组合算法 [J], 袁超;康国华;夏青;郑峰婴;华冰
5.基于翻转位检测的DBZP微弱GPS信号捕获算法 [J], 张迎新;李春鹏;林菡;施键兰;;;;
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
C urent wih t i e sng w i e pr a pplc ton oft PS r eve ,H ow O c e oc ton n r l y t he ncr a i d s e d a i ai he G ec i r t a hive l a i i w e k a e ionm e t c nv r n sbe om i r lm . ng ap obe Theor i a y GPS r c i r a d n r e eve sc n’ tc pt ea r c t viai n aelt i n l, a ur nd ta k hena g to s tl e sg as i
Ab t a t Th u p s fs n lc p u e i t ee mi e t e c re t o ai n v s l a e i sn mb r o e s n l sr c : e p r o e o g a a t r s O d tr n h u r n c t i b e s tl t u i l o i le e s f h i a t g
2 ELEcT RON/ C TEsT
Ja o" n2 No. ,
GP 软 件接收机 中微 弱信号捕获算法研究 S
李建伟 ,严丽云
( 南京 邮电大学通信与信息工程学院 ,江苏 南京 ,2 00 ) 10 3
摘 要: 信号 捕获的 目的是确定接 收机 当前所 在位置的可 见卫星号 ,进而计算 可见卫 星的载波频率 和伪随机 码相位信息 。 目前随着G S P 接收机应用 的 目益广泛 ,如何在弱信号环境下实现定 位的问题 日益突 出。普通 的
a h e eb t r ee t n c p b h . c iv et t ci a a i t ed o y
K e o ds W e k sg a yw r : a i l;Ac u sto ag it ; Co r ntit g ai n n q ii n lor hm i he e n e r to
中图 分 类 号 : N 6 . T 9 71 文献标识码: A
R e e r h a a Ulli n l ' hm e k s a c OH a on n c "il q Sto a ort g i l ot ofw a
sgna n i li GPS s t a e r c i r ofw r e e ve
GS P 接收机不能捕 获和跟踪 到导航卫星信号, 能设法提高G S 只 P 接收机的灵敏度来 实现 导航和定位 。为 了解决
微弱信号情况下 的GP 信号捕获问题 ,在传统 的相干 积分 和非 相干积分的捕获方 法的基 础上 ,本文采用 了一 S 种基于 “ 块处理”与差分相干积分相结合的 弱信号捕获方 法 ,并将 其与传统的相干积分结合非相干积分 的捕 获方法进行 了比较 ,通过仿真分析证明 ,这种 信号捕获算法具有更强的信 号检测能 力。 关键词:微弱信号 ;捕获方 法 ;相干积分
巴
设 计 s 研 发
0 引言
利 用 G S卫星 信号 定位 、测速 和授 时首 先要 P 捕获 G S卫星信 号 。G S卫星信 号捕 获 的 目标 是 P P
o e k sg a fw a i lGPS sg a c uiii r lm ,t o r n n e r t n i la q ston p ob e n he c he e ti t g ai ofta ii na n n— on r d to la d no m eho bae n hec pt e . i a e d t d s d o t a ur Th sp p ra opt ne a qu st l ort s w c iii ag ihm ofw e k sg a s d on b o k p oc si nd on a i l e l c r esng a n ba dfe e il o r n i r nt l c he e t.Th i u ai ina c uiii n a ay i i iae hea q ston ag rt n ti pe a ay e sm lton ofsg la q s o n ss nd c tst c uiii o ihm i h spa rc n t l l
c n o l o i r v h e s i i f S r c i e c iv h a i ai n a d p s i n n . n o a ny t mp o et esn i v t o t y GP e ev rt a h e et e n vg t n o i o i g I o o t
L a we Ya i n ii J n i nLy , u Naj g i r t f ot a dT lc mmu ia o s NuP ) n n v syo P s e o i Un e i sn e nct n ( i T
S ho fTee o m un c ton a n o m ai n g ne rng c olo lc m i ai nd I f r to En i ei