BDS机器人编程软件、驱动安装及程序下载介绍
工业机器人离线编程(ABB)2-1 安装RobotStudio
二、实践操作
1、下载RobotStudio • 本课程所用软件版本为RobotStudio6.01,课程中的案例在6.01以下版本
中可能无法正常打开或使用,请及时更新软件。
二、实践操作
2、安装RobotStudio
二、实践操作
2、安装RobotStudio
二、实践操作
2、安装RobotStudio
2-1 安装工业机器人离线编程仿真软件 RobotStudio
一、工作任务
• 1、学会下载RobotStudio。 • 2、学会RobotStudio的正确安装。
二、实践操作
1、下载RobotStudio • 本课程所用软件版本为RobotStudio6.01,课程中的案例在6.01以下版本
中可能无法正常打开或使用,请及时更新软件。
接虚拟控制器这样的问题,所以建议关闭防火墙或对防火墙的参数进行恰 当的设定。
Байду номын сангаас
三、总结
为了确保RobotStudio能够正确的安装,请注意以下的事项: • 1、计算机的系统配置建议如下:
硬件 CPU 内存 硬盘 显卡
操作系统
要求 i5或以上 2G或以上 空闲20G以上 独立显卡
WIN7或以上
三、总结
为了确保RobotStudio能够正确的安装,请注意以下的事项: • 2、操作系统中的防火墙可能会造成RobotStudio的不正常运行,如无法连
BDS产品介绍

4
中小学通用技术课程配套教材教具----加强套装
产品说明 特性
包括 2.4G 遥控接收套装 1 套、声控传感器套装 1 套、红外避障传感器
套装 4 套、电子指南针套装 2 套、链轮套装 1 套、扁条套装 1 套、皮
带套装 1 套、螺丝套装 1 套、轴类套装 1 套、轴套套装 1 套、手提包
装箱 1 个 1、 增加中小学通用技术课程配套教材教具中没有用到的传感器,
10
巡线传感器
产品说明 特性
包括巡线传感器 1 个,产品编号:99-LCE75299-O 1.反应距离:1-40MM 2.反应速度:3MS 3.静态电流:20mA±3Ma 4.工作电压:5V 5.工作温度:0-40 摄氏度 6.端口为插针,与旧主控器端口插座配合 7.环境测试:10lux-200lux 的光环境下工作正常 8.颜色越黑反馈值越大,颜色越白反馈值越小
7
减速马达箱套装
产品说明 特性
包括调速马达箱 1 个,产品编号:99-LCE75299-I 1.内置齿轮机构减速比为 38 2.输出转速约为 585rpm 3.堵转扭矩 1500G.CM 4.端口为插针,与旧主控器端口插座配合
调速马达箱套装(II 代)
产品说明 特性
包括调速马达箱 1 个,产品编号:99-BSK88999HC 1. 输出转速约为 1700rpm 2. 堵转扭矩 2000G.CM 3. 端口为插孔,与新主控器端口插座配合 4. 可对马达进行减速调整,每按动一下调速键,马达速度相应减少 1% 5. 马达减速后如需恢复原来速度,需按复位键,否则一直为减速状态,
9
行程开关
新 旧
产品说明 特性
包括 1 个行程开关 旧 (99-LCE75299-M)
midas SmartBDS软件功能介绍
midas
SmartBDS
SmartBDS的预 处理、计算、出图、 出计算书等步骤中均 对该阶段数据进行数 据检查,列出错误信 息,并能精确定位到 对话框参数
精确定位
“强大的数据检查及错误定位,减少设计师检查数据及修改错误数据的工作!”
特色功能6:智能、实用的预处理功能
自动划分节点、单元
midas
midas
SmartBDS
2.分析、设计功能
分析设计结果查看
midas SmartBDS能做什么?
midas
SmartBDS
3.出图功能
midas SmartBDS能做什么?
midas
SmartBDS
3.出图功能
midas SmartBDS能做什么?
midas
SmartBDS
3.出图功能
midas SmartBDS能做什么?
特色功能1:简洁友好的程序界面, 操作简便易懂
主菜单按功能划分,图标按 钮清晰形象,识别性强
midas
SmartBDS
主界面功能布局紧凑合理,亦可个性化 调配,友好、简洁、操作便利
实时现实的全 桥及构件3D 模型,准确直 观,加快建模 速度,此区域 亦可显示设计 结果三维图形, 查看方便直观, 易读性强
midas
SmartBDS
6.自动校审功能
midas SmartBDS主要操作流程
midas
SmartBDS
midas SmartBDS初步认识:主操作界面
快速访问工具栏
开始菜单 主菜单 (丽板风格)
midas
SmartBDS
工具条 视图区
工作树
辅助示意图
信息窗口
机器人仿真软件安装与使用
J2轴 J1轴
( 1 ) ABB 机器人 IRB120 机械原点刻度位置 注:各个型号的机器人机械原点刻度位置会有所不同
关节轴1
关节轴2
关节轴3
关节轴4
关节轴5
关节轴6
(2)电机偏移数据
位置偏移
小提示:如果机器人
由于安装位置的关系, 无法六个轴同时到达 机械原点刻度位置, 则可以逐一对关节轴 进行转数计数器更新。
机器人仿真软件安装与使用
一、RobotStudio软件的安装与使用 二、ABB机器人基础操作
一、RobotStudio软件的安装与使用
RobotStudio的安装
创建工作站
示教器使用
1.RobotStudio的安装
下载(拷贝)安装包 解压安装包 点击解压文件夹 找到 图标,并双击;
根据提示进行操作(安装方式选择完整安装,安装路径改 成D盘) 完成安装后,桌面出现 图标。
下拉菜单→备份与恢复
2.数据备份与恢复
3.关节运动
下拉菜单→手动操纵→动作模式→轴1-3(轴4-6)→确定
4.线性运动
下拉菜单→手动操纵→动作模式→线性→确定
4.线性运动
机器人的线性运动是指安装在机 器人第六轴法兰盘上的工具在空 间中作线性运动。
如果对使用操纵杆通过位移幅度来控制
机器人运动的速度不熟练的话。那么可 以使用“增量”模式,来控制机器人运 动。
在增量模式下,操纵杆每位移一次,机
器人就移动一步。如果操纵杆持续一秒 或数秒钟,机器人就会持续移动(速率 为每秒10步)。
3.重定位运动
操作过程:下拉菜单→手动操纵→动作模式→重定 位→确定 机器人的重定位运动是指机器人第六轴法
CodeWarriorV.软件使用指南
Code Warrior 软件使用指南一、软件安装指南二、关于BDM驱动三、创建一个新的工程四、编写与运行你的程序2011年10月16日陈万忠Code Warrior 软件使用指南一、软件安装指南1. 打开文件安装文件夹2. 找到安装文件3. 双击此文件,出现安装界面:4. 点击“NEXT”按钮,出现安装路径信息。
如果修改系统默认路径,点击“change”按钮,然后修改安装路径,否则点击“NEXT”按钮。
5. 在安装过程中,根据提示信息,完成每一步的安装。
6. 安装完毕后,在所有程序中找到Code Warrior 执行文件,点击执行即可进入Code Warrior 集成环境。
7. 也可以拖到桌面上。
此时桌面出现如下图标:二、关于BDM驱动请将“BDM使用说明和驱动”文件夹下的文件:和以及三个文件,复制到:C:\Program Files\Freescale\\Prog\gdi目录下(或者你安装时修改过的Code Warrior 所在目录\Prog\gdi子目录下),在调试时选择Open Source BDM 调试接口即可。
三、创建一个新的工程创建一个新的工程,要按照下面向导选项的8个步骤来选择完成。
双击桌面快捷图标,进入 Code Warrior集成开发环境窗口。
第一步:创建一个新的工程。
第二步:选择CPU类型,选择HCS12X目录下的HCS12X Family。
第三步:选择CPU芯片型号和BDM工具TBDML。
第四步:选择编程语言,我们选择C语言编程。
第五步:添加文件到工程,一般直接按“下一步”。
第六步:快速开发应用程序选择,选None。
第七步:选择中的用户自定义模式。
第八步:选择不使用PC-Lint(TM)链接工具软件,点击“完成”按钮,Code Warrior集成开发环境就会自动生成整个工程的文件系统。
四、编写与运行你的程序在Code Warrior集成开发环境中,利用其自动生成的函数模板,就可以编写和调试你的应用程序了。
机器人软件安装的说明书
机器人软件安装的说明书欢迎使用我们的机器人软件!本说明书将为您详细介绍机器人软件的安装步骤和注意事项,以确保您能够顺利地安装和使用该软件。
一、系统要求在开始安装机器人软件之前,请确保您的电脑符合以下最低系统要求:- 操作系统:Windows 7及以上版本,或者Mac OS X 10.10及以上版本。
- 处理器:英特尔或AMD 1GHz以上处理器。
- 内存:至少2GB的可用内存。
- 硬盘空间:至少200MB的可用硬盘空间。
- 显示器分辨率:建议使用1024x768或更高分辨率。
二、软件安装步骤请按照以下步骤进行机器人软件的安装:1. 下载软件安装包请前往我们的官方网站(请勿在文章中出现网址链接)下载最新版本的机器人软件安装包。
确保下载的安装包与您的系统兼容并且来源可靠。
2. 打开安装包双击下载的安装包,然后根据系统提示选择安装语言并确认开始安装。
3. 安装目标路径在安装向导中,您可以选择软件的安装目标路径。
您可以接受默认路径,也可以选择其他路径进行安装。
4. 完成安装跟随安装向导的指示完成安装过程。
请耐心等待,直到安装进程完成。
三、软件使用指南以下是机器人软件的基本使用指南,帮助您更好地利用软件的功能:1. 启动软件双击机器人软件的桌面图标或者在开始菜单中找到软件并打开。
2. 注册账户首次启动软件时,您需要创建一个账户并进行注册。
请按照软件界面上的步骤完成注册过程。
3. 连接机器人在成功注册后,您需要将机器人与软件进行连接。
请按照软件提供的指示,通过USB或者Wi-Fi等方式与机器人进行连接。
4. 软件设置您可以根据个人喜好和需要对软件进行设置。
例如,设置语言、音量、互动模式等。
5. 软件功能机器人软件提供丰富的功能,例如语音识别、人脸识别、文字聊天等。
请在软件界面中探索和使用这些功能,以满足您的需求。
四、注意事项在安装和使用机器人软件时,请务必注意以下事项:1. 安全性请确保下载软件安装包的来源可信,并且避免从非官方渠道下载软件,以确保您的电脑和数据的安全。
单片机机器人编程软件安装方法
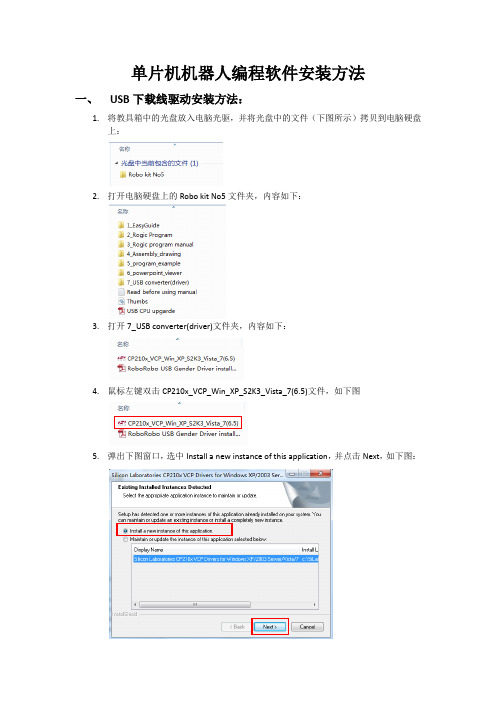
单片机机器人编程软件安装方法一、USB下载线驱动安装方法:1.将教具箱中的光盘放入电脑光驱,并将光盘中的文件(下图所示)拷贝到电脑硬盘上:2.打开电脑硬盘上的Robo kit No5文件夹,内容如下:3.打开7_USB converter(driver)文件夹,内容如下:4.鼠标左键双击CP210x_VCP_Win_XP_S2K3_Vista_7(6.5)文件,如下图5.弹出下图窗口,选中Install a new instance of this application,并点击Next,如下图:6.弹出下图窗口:7.进度条完成之后,弹出下图窗口,并点击Next。
8.弹出下图窗口,选中I accept the terms of the license agreement,并点击Next。
9.弹出下图窗口,点击Next。
10.弹出下图窗口,点击Install。
11.之后弹出下图窗口。
12.上个步骤的进度条完成后,会弹出下图窗口,点击Finish即完成安装。
二、编程软件安装方法:1.打开2_Rogic Program文件夹,内容如下:2.鼠标左键双击Rogic3.2(8Port),如下图红色方框:3.弹出下图界面,点击Next,进行下一步。
5.之后会弹出下图窗口,等待进度条变为100%即可。
6.弹出下图窗口,即安装完成,点OK即可。
8.安装完成后,双击桌面的快捷方式Rogic3.2(8Port),即可开始为机器人编程,快捷方式图标如下图所示:9.如果电脑已经联网的话,打开软件后会进入软件更新的操作,界面如下:10.之后,软件更新的操作如下:(由于系统语言不兼容,界面可能会出现以下乱码的情况,只需依次点击红色方框中的按钮即可)11.软件更新完成后,桌面会生成一个新版本软件的快捷方式(Rogic 3.2.8.12),如下图所示。
之后编程用更新后的软件即可(旧版快捷方式可删除掉)。
12.新版软件打开后,仍会显示检查软件更新的窗口,如下图所示,不用理会,等待检查完成后即可进入编程界面。
2024版RobotStudio教程ABB(中国)

RobotStudio教程ABB(中国)•机器人技术概述•RobotStudio 软件介绍•基本操作与仿真环境搭建•高级功能应用与拓展•实际案例分析与解决方案分享•总结回顾与未来展望目录contents01机器人技术概述机器人定义与发展历程机器人的定义机器人是一种能够自动执行工作的机器系统。
它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动。
机器人的发展历程机器人的发展大致经历了三个阶段,即示教再现型机器人、感觉型机器人和智能型机器人。
汽车制造业电子电气行业塑料橡胶行业食品行业工业机器人应用领域01020304工业机器人可应用于汽车制造的各个环节,如焊接、装配、喷漆等。
工业机器人可用于电子电气产品的组装、检测和包装等环节。
工业机器人可用于塑料和橡胶产品的成型、切割和打磨等环节。
工业机器人可用于食品的加工、包装和运输等环节。
ABB机器人技术特点及优势技术特点ABB机器人采用了先进的控制技术和机械设计,具有高精度、高速度和高可靠性的特点。
同时,ABB机器人还具有良好的开放性和可扩展性,可方便地与各种设备和系统进行集成。
优势ABB机器人在市场上具有显著的优势,包括丰富的产品线、广泛的应用领域、完善的售后服务和强大的技术支持。
此外,ABB还积极推动机器人技术的发展和创新,不断推出新的产品和解决方案,以满足客户不断增长的需求。
02 RobotStudio软件介绍01安装步骤02下载RobotStudio软件安装包;03双击安装包,按照提示进行安装;1 2 3选择安装路径和相关组件;等待安装完成。
启动方法在桌面或开始菜单找到RobotStudio图标;双击图标启动软件。
菜单栏包含文件、编辑、视图等基本操作;工具栏提供常用功能的快捷按钮;工作区显示机器人模型、工作环境等;属性栏显示当前选中对象的属性信息。
用于创建和编辑机器人模型;用于控制机器人的运动;用于模拟机器人的实际工作环境;用于编写和调试机器人程序。
ABB-robotstudio使用详细步骤

搬运码垛工作站建模1、创建机器人系统2、创建动态输送链3、创建动态夹具4、工作站逻辑连接5、添加 IO(设置好需重启)6、示教目标点(同步到RAPID )7、RAPID 编程一、创建机器人系统1、创建空工作站2、导入 IRB 260 机器人模型二、创建动态输送链1、添加输送链并修改位置2、创建 600*400*200 的物料并修改位置3、添加一个 smart 组件4、添加 source 组件5、设置物料本地原点6、添加LINEMOVER 和 QUEUE 组件8、添加面传感器组件10、设置 SC_输送链的属性连接11、设置信号连接12、添加信号处理组件,用于检测传感器下降沿14、传感器与 SC 输送链的输出联系16、添加置位复位组件,对仿真开始结束信号进行保持17、18、进行仿真设定选择SC——输送链进行验证三、创建动态夹具1、先制作一个吸盘模型,然后设置成工具,并安装到机器人法拉盘2、添加SMART 组件3、添加ATTACHER 和DETACHER 组件5、添加一个线传感器组件7、设置吸盘工具不能被传感器检测9、设置属性连接11、添加信号处理取非和锁定组件13、添加一个示教物料四、工作站逻辑连接五、参考代码MODULE MainMoudlePERS tooldatatGrip:=[TRUE,[[0,0,200],[1,0,0,0]],[25,[0,0.00109327,116.889],[1,0,0,0],0,0,0]];!吸盘工具数据PERS loaddata LoadEmpty:=[0.01,[0,0,1],[1,0,0,0],0,0,0];PERS loaddata LoadFull:=[40,[0,0,50],[1,0,0,0],0,0,0];!有效载荷数据PERS robtarget pHome:=[[1620.00,-0.00,1331.59],[1.27986E-06,-0.707107,- 0.707107,1.27986E-06],[0,0,1,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];!基准点PERS robtarget pActualPos:=[[1620,-1.87531E-14,1331.59],[1.27986E-06,- 0.707107,-0.707107,1.27986E- 06],[0,0,1,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];!实际点PERS robtarget pPick1:=[[1488.007792464,376.826660408,476.964684195],[0,0.707106307,0.7071 07256,0],[0,0,1,0],[9E9,9E9,9E9,9E9,9E9,9E9]];!1 路拾取目标点PERS robtarget pPlace1:=[[- 292.446,1263.27,55.4492],[0,0.707107,0.707106,0],[1,0,2,0],[9E+09,9E+09,9E+09, 9E+09,9E+09,9E+09]];!1 路放置基准点PERS robtarget pBase1_0:=[[- 292.446294945,1263.272085268,55.449220723],[0,0.707107387,0.707106176,0],[1, 0,2,0],[9E9,9E9,9E9,9E9,9E9,9E9]];!1 路放置 0 度姿态PERS robtarget pBase1_90:=[[-391.976797324,1362.469634994,55.449159414],[0,1,-0.000030621,0],[1,0,3,0],[9E9,9E9,9E9,9E9,9E9,9E9]];!1 路放置 90 度姿态PERS robtarget pPick2:=[[1488.013130905,-358.406014736,476.965039287],[0,0.707106307,0.707107256,0],[-1,0,0,0],[9E9,9E9,9E9,9E9,9E9,9E9]];PERS robtarget pPlace2:=[[-317.378,-1857.99,55.449],[0,0.707108,0.707106,0],[-2,0,-1,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];PERS robtarget pBase2_0:=[[-317.378137718,-1857.993871961,55.448967354],[0,0.707107745,0.707105817,0],[-2,0,-1,0],[9E9,9E9,9E9,9E9,9E9,9E9]];PERS robtarget pBase2_90:=[[-407.525988074,-1755.902485322,55.449282402],[0,1,-0.000031217,0],[-2,0,0,0],[9E9,9E9,9E9,9E9,9E9,9E9]];PERS speeddata MinSpeed:=[1000,300,5000,1000];PERS speeddata MidSpeed:=[2500,400,5000,1000];PERS speeddata MaxSpeed:=[4000,500,5000,1000];!搬运速度定义PERS bool bPalletFull1:=FALSE;PERS bool bPalletFull2:=FALSE;!逻辑布尔量,拾取后为UE ,放置后为FALSEPERS num nCount1:=1;PERS num nCount2:=1;!输送链计数PROC Main()rInitAll;WHILE TRUE DOIF diBoxInPos1=1 AND diPalletInPos1=1 AND bPalletFull1=FALSE THENrPick1;rPlace1;ENDIFIF diBoxInPos2=1 AND diPalletInPos2=1 AND bPalletFull2=FALSE THENrPick2;rPlace2;ENDIFWaitTime 0.1;ENDWHILEENDPROCPROC rInitAll()Reset doGrip;pActualPos:=CRobT(\tool:=tGrip);pActualPos.trans.z:=pHome.trans.z;MoveL pActualPos,MinSpeed,fine,tGrip\WObj:=wobj0;MoveJ pHome,MidSpeed,fine,tGrip\WObj:=wobj0;bPalletFull1:=FALSE;nCount1:=1;bPalletFull2:=FALSE;nCount2:=1;ENDPROCPROC rPick1()MoveJ Offs(pPick1,0,0,400),MaxSpeed,z50,tGrip\WObj:=wobj0; MoveL pPick1,MinSpeed,fine,tGrip\WObj:=wobj0;Set doGrip;WaitTime 0.3;GripLoad LoadFull;MoveL Offs(pPick1,0,0,400),MinSpeed,z50,tGrip\WObj:=wobj0; ENDPROCPROC rPick2()MoveJ Offs(pPick2,0,0,400),MaxSpeed,z50,tGrip\WObj:=wobj0; MoveL pPick2,MinSpeed,fine,tGrip\WObj:=wobj0;Set doGrip;WaitTime 0.3;GripLoad LoadFull;MoveL Offs(pPick2,0,0,400),MinSpeed,z50,tGrip\WObj:=wobj0; ENDPROCPROC rPlace1()rPosition1;MoveJ Offs(pPlace1,0,0,400),MidSpeed,z50,tGrip\WObj:=wobj0; MoveL pPlace1,MinSpeed,fine,tGrip\WObj:=wobj0;Reset doGrip;WaitTime 0.3;GripLoad LoadEmpty;MoveL Offs(pPlace1,0,0,400),MidSpeed,z50,tGrip\WObj:=wobj0; MoveJ Offs(pPick1,0,0,400),MaxSpeed,z50,tGrip\WObj:=wobj0; nCount1:=nCount1+1;IF nCount1>20 THENbPalletFull1:=TRUE;ENDIFENDPROCPROC rPlace2()rPosition2;MoveJ Offs(pPlace2,0,0,400),MaxSpeed,z50,tGrip\WObj:=wobj0; MoveL pPlace2,MinSpeed,fine,tGrip\WObj:=wobj0;Reset doGrip;WaitTime 0.3;GripLoad LoadEmpty;MoveL Offs(pPlace2,0,0,400),MidSpeed,z50,tGrip\WObj:=wobj0; MoveJ Offs(pPick2,0,0,400),MaxSpeed,z50,tGrip\WObj:=wobj0; nCount2:=nCount2+1;IF nCount2>20 THENbPalletFull2:=TRUE;ENDIFENDPROCPROC rPosition1()TEST nCount1CASE 1:pPlace1:=Offs(pBase1_0,0,0,0);CASE 2:pPlace1:=Offs(pBase1_0,600+10,0,0);CASE 3:pPlace1:=Offs(pBase1_90,0,400+10,0);CASE 4:pPlace1:=Offs(pBase1_90,400+10,400+10,0);CASE 5:pPlace1:=Offs(pBase1_90,800+20,400+10,0);CASE 6:pPlace1:=Offs(pBase1_0,0,600+10,200);CASE 7:pPlace1:=Offs(pBase1_0,600+10,600+10,200);CASE 8:pPlace1:=Offs(pBase1_90,0,0,200);CASE 9:pPlace1:=Offs(pBase1_90,400+10,0,200);CASE 10:pPlace1:=Offs(pBase1_90,800+20,0,200);CASE 11:pPlace1:=Offs(pBase1_0,0,0,400);CASE 12:pPlace1:=Offs(pBase1_0,600+10,0,400);CASE 13:pPlace1:=Offs(pBase1_90,0,400+10,400);CASE 14:pPlace1:=Offs(pBase1_90,400+10,400+10,400);CASE 15:pPlace1:=Offs(pBase1_90,800+20,400+10,400); CASE 16:pPlace1:=Offs(pBase1_0,0,600+10,600);CASE 17:pPlace1:=Offs(pBase1_0,600+10,600+10,600);pPlace1:=Offs(pBase1_90,0,0,600);CASE19:pPlace1:=Offs(pBase1_90,400+10,0,600);CASE20:pPlace1:=Offs(pBase1_90,800+20,0,600);DEFAULT:TPErase;TPWrite"the Counter of line1is error,please check it!";Stop;ENDTESTENDPROCPROC rPosition2()TEST nCount2CASE1:pPlace2:=Offs(pBase2_0,0,0,0);CASE2:pPlace2:=Offs(pBase2_0,600+10,0,0);CASE3:pPlace2:=Offs(pBase2_90,0,400+10,0);CASE4:pPlace2:=Offs(pBase2_90,400+10,400+10,0);CASE5:pPlace2:=Offs(pBase2_90,800+20,400+10,0);CASE6:pPlace2:=Offs(pBase2_0,0,600+10,200);pPlace2:=Offs(pBase2_0,600+10,600+10,200); CASE8:pPlace2:=Offs(pBase2_90,0,0,200);CASE9:pPlace2:=Offs(pBase2_90,400+10,0,200);CASE10:pPlace2:=Offs(pBase2_90,800+20,0,200);CASE11:pPlace2:=Offs(pBase2_0,0,0,400);CASE12:pPlace2:=Offs(pBase2_0,600+10,0,400);CASE13:pPlace2:=Offs(pBase2_90,0,400+10,400);CASE14:pPlace2:=Offs(pBase2_90,400+10,400+10,400);CASE15:pPlace2:=Offs(pBase2_90,800+20,400+10,400);CASE16:pPlace2:=Offs(pBase2_0,0,600+10,600);CASE17:pPlace2:=Offs(pBase2_0,600+10,600+10,600);CASE18:pPlace2:=Offs(pBase2_90,0,0,600);CASE19:pPlace2:=Offs(pBase2_90,400+10,0,600);CASE20:pPlace2:=Offs(pBase2_90,800+20,0,600);DEFAULT:TPErase;TPWrite"the Counter of line1is error,please check it!";Stop;ENDTESTENDPROCPROC rModify()MoveJ pHome,MinSpeed,fine,tGrip\WObj:=wobj0;MoveJ pPick1,MinSpeed,fine,tGrip\WObj:=wobj0;MoveJ pBase1_0,MinSpeed,fine,tGrip\WObj:=wobj0;MoveJ pBase1_90,MinSpeed,fine,tGrip\WObj:=wobj0;MoveJ pPick2,MinSpeed,fine,tGrip\WObj:=wobj0;MoveJ pBase2_0,MinSpeed,fine,tGrip\WObj:=wobj0;MoveJ pBase2_90,MinSpeed,fine,tGrip\WObj:=wobj0;ENDPROCENDMODULE。
ABB机器人使用robotstudio系统安装步骤

系统安装过程中请不要随意更改步骤否则会安装失败失败后则无法重新安装只能请abb工程技术人员进行安装代价不是一般的大
ABB机器人使用 robotstudio系统安装步骤
ABB机器人系统安装步骤 在工业机器人维护与保养中,若出现机器人系统崩溃或者无法解决的错误,常常需要重新安装系统,介绍用robotstudio制作系 统,方法如下: 1、机器人做”X”启动BOOT Application,进入系统引导界面
2、打开RobotStudio
3、点击安装管理器
4、点击打开 5、点击新建 6、编辑新系统的名称,选择系统备份路径,单击“下一步”
7、点击“下一步” 8、点击“添加” 9、选择系统秘钥,确定,下一步
10、核对系统选项,点击“下一步”,系统选项要与原系统选项一致选择“是”机器人重启,自动进入新系统 系统安装过程中,请不要随意更改步骤,否则会安装失败,失败后,则无法重新安装,只能请ABB工程技术人员进行安装 (代价不是一般的大)。
教师参考资料_第一章机器人设计(1)_射门机器人

科学探索活动手册教师参考资料第一章机器人设计(1)活动项目二射门机器人一、教学活动目标掌握两个巡线传感器与三个减速马达的结合编程应用,并能让射门机器人能完成设定的射门任务。
二、教学重点掌握巡线传感器与减速马达的程序调试。
三、主要教学方法演示法、任务驱动法、课堂讨论法、讲授法、案例教学法。
四、教学准备1、射门机器人每小组一套;2、中小学通用技术课程配套教材第四册《科学探索》活动手册017活动准备》里面的结构胶件每小组一套(有条件每人一套);3、BDS机器人编程软件、教学课件五、教学过程(一)创设情境导入1、教师播放学校上体育课学生踢足球的视频。
2、旁白:足球运动是一项大家非常喜爱的运动。
让机器人去踢足球,听起来像“天方夜谭”似的。
机器人去踢足球?当然,就看你制作的机器人是否踢足球了。
(二)教学活动环节设计1、教师把已制作好的射门机器人放在射门场地上,射门机器人沿着黑线前行,当到达到T字形黑线射门点时,会停止前行,然后启动射门轴,把T字形黑线射门点前的球射进球门。
2、学生观察,教师启发学生思考。
当射门机器人沿着黑线前行到达到T字形射门点时会停止车轮,然后启动了射门轴。
这样的程序应该怎么编写呢?3、学生根据书本的搭建步骤搭建射门机器人或自己设计射门机器人,教师巡视,当学生在搭建过程中遇到到问题时,引导学生分析问题、解决问题。
4、教师示范演示讲解射门机器人程序。
演示讲解程序之前,可以复习讲解巡线传感器的工作原理,这样可以温故而知新。
编程序时,要确定射门机器人前进时的左边减速马达(电机2)为正转,右边的减速马达(电机4)为反转。
选择马达端口为电机2和电机4。
第一步:编程时,先把当射门机器人到达T字形黑线射门点时,射门机器人会停止并启动射门轴这个任务的程序编写出来。
由于射门机器人有两个巡线传感器,当两个巡线传感器都检测到黑线时会停止,可以这样设置当两个巡线传感器检测到的亮度临界值就是没有检测到黑色时会执行成立端,也就是条件循环内路线。
扫地机器人程序更新指导安装调试步骤
扫地机器人程序更新指导安装调试步骤随着科技的不断进步,人们的生活变得更加便利和智能化。
扫地机器人作为现代家电产品中的一种,已经逐渐成为家庭清洁的好帮手。
然而,随着时间的推移,扫地机器人的程序可能需要更新以提升性能和功能。
在本文中,我们将为您提供扫地机器人程序更新的安装和调试步骤指导,确保您的扫地机器人始终保持最新的性能。
步骤一:准备工作在开始更新扫地机器人的程序之前,请确保您已经完成以下准备工作:1. 确认您的扫地机器人型号和序列号,这将帮助您找到正确的程序更新文件。
2. 连接您的扫地机器人到可靠的电源和充电座,确保其电量充足,以免在更新过程中断电。
3. 准备一台连接至互联网的电脑或智能设备,可以使用该设备下载和传输程序更新文件。
步骤二:下载程序更新文件1. 打开您的电脑或智能设备,并连接至互联网。
2. 打开您所使用的浏览器,前往扫地机器人制造商的官方网站。
3. 寻找并下载适用于您扫地机器人型号的最新程序更新文件。
确保您下载的文件来源可靠,以免安装病毒或恶意软件。
步骤三:连接扫地机器人与电脑1. 使用提供的USB数据线或其他适配器,将您的扫地机器人连接至电脑或智能设备。
2. 在电脑上打开文件管理器,确保您的扫地机器人成功连接并被识别。
步骤四:安装程序更新1. 在文件管理器中,找到您所下载的程序更新文件,并将其复制到您的扫地机器人的存储设备中。
通常,您可以将程序更新文件直接拖放到扫地机器人的存储设备中。
2. 断开扫地机器人与电脑的连接,确保程序更新文件已经成功传输至机器人内部存储。
步骤五:启动机器人并进行程序更新1. 将您的扫地机器人放置在安全且开阔的地方。
2. 按下机器人上的电源按钮,启动机器人。
3. 根据您的扫地机器人的设定,选择相应的菜单选项以进行程序更新。
可能需要使用机器人的控制面板或遥控器来完成此步骤。
4. 机器人会自动搜索并检测其存储设备中的程序更新文件,然后开始更新程序。
请确保机器人保持连接至电源,以免在更新过程中断电。
BDS 虚拟机器人

谢谢观看!
BDS虚拟机器人
一.软件的操作界面 二.基本的操作方法 三.实现仿真
BDS虚拟机器人拼装界面
电脑最低配置要求 内存:512M以上; CPU:1G以上; 显卡:256M以上; 硬盘:10G以上 兼容Windows XP系统 、Windows 7系 统(32位) 拼装模块中包含“结构”、“连接”、 “分组”、“限制”四个功能模块。 Excel表格:显示当前所用到得零件。 时间:当你选择零件开始拼装起,时 间就开始显示计时,是用来记录拼装 到仿真这个过程所用的时间。 地板:拼装时作为第一个参考水平面, 可按住鼠标右键不放,任意旋转当前 的水平面(地板)。
BDS虚拟机器人仿真界面
仿真模块包含“正转”、 “反转”、“运行”、 “触碰”、“停止”、 “重新”、“声音”7个 功能模块。 仿真中的Excel表格显示 当前电子件的检测值, 根据显示的值,作编程 的参数调整。
BDS虚拟机器人基本操作一
W A S D
“Ctrl + 鼠标左键 + 向左/向右”
操作说明:1.按住键盘的“Ctrl”和鼠标的左键,可左右拖动地板。 2.零件可使用键盘的上/下/左/右键调节物体的摆放形态 3.键盘A/D/W/S可调节拼装角度
BDS虚拟教育平台仿真操作
场景中分别设定了场景一,场景二, 场景三,而且还可以自定义场景,独 立保存。 自定义的场景中的地板设置必须是 5M*5M。
BDS虚拟平台仿真二
操作说明: 一、设定场景后,把机 器人放置在蓝色初始区 上。
二、点击仿真功能,然 后点击“运行”。 仿真过程中,还有计算 分数,编程模块中包含“执 行”、“检测”、“控 制”、“程序”四个功 能模块。 虚拟编程功能与“博思 威龙编程软件”一样, 操作方式相似。
BDS人型资料

9.主控制板7个备用伺服马达端口,及时解决不时之需
10.红外发射遥控器,室内正常操作遥控距离可达10米
11、含RM MRC机器人1套,遥控器1个,锂电池1块,充电器及充电器转接头各1个、RS232下载线及转接头线各1条、光盘1张,说明书1本
三、功能特点:
序号
图形
功能特点
备注
1
灵活….
有17个伺服机.可以做180度动作, MRC机器人能表演生动,敏捷的动作.机器人配有100多种可事先安装的动作,例如:打斗,跳舞的动作.这些动作可以由CD-ROM取得。
2
可编程……..
找不到您想要的机器人动作吗?那何不用MRC Commander软件编写您所要的动作.简单的新增不同的姿势以显示机器人的动作并设定到摇控器按键上以便”下载”.这就是类人型机器人前所未有的简单编程!
BDS人型机器人资料
一、参数
产品
描述
BDS
人
型
机
器
人
1.1、2两个通道,可同时分别控制两台机器人
2.17个自由度,自由灵活控制机器人动作
3.遥控器可以多个按键组合使用,自由调用程序
4.内置喇叭,可下载播放Wav格式音乐
5.可在线调试机器人动作及程序
6.图形化编程界面,三维仿真动画,实时显示编程动作
7.伺服器采用金属齿轮,最大扭矩达11 kg·cm
2. 17个微型伺服电机,内置喇叭
3.带遥控模式、编程模式、特设模式、声控模式等四种控制模式
4.可完成240多个动作,可听懂10个语言指令并执行对应动作,能说180多个短语,能播放90多种背景音乐
5.有A、B两个通道,可同时分别控制两台机器人
迪百思DPX安装手册

Sense3NC.INI 4800 迪百思(D P X )网络版安装使用说明1. 选择服务器:可以用单位的服务器也可以用网络中的任何一台 PC 机作为服务器,这台机子同时也可以做客户机使用(可选择一台运行速度较快、资源占用较少的计算机担任服务器,这样可以减少客户机的等待时间)。
2. 设备驱动安装:将光盘中的“网络版工具程序”文件夹复制到作为服务器的计算机中。
运行“网络版工具程序\设备驱动程序”文件夹中的“Wiz.exe ”安装网络锁设备驱动程序。
然后在 USB 口上插入网络锁。
(注意:在安装驱动前不要插入网络锁)3. 运行服务程序:运行“网络版工具程序\服务程序(一组)”文件夹中的“S3NETSVR-USB.exe ”,这时候电脑的右下角会有标 ,右键-----显示主窗口:此时客户机上就可以使用 DPX 网络版程序了。
为了操作方便可以在桌面上建立服务程序的快捷方式。
4. 服务程序设置:如果有特殊需要则进行设置。
鼠标点第一个标 ,会弹出如图对话框。
参数的含义为:“服务名”和“服务端口”一般不需要修改,与客户端设置值须一致。
默认超时 30 分钟,即某台电脑加载后 30 分钟不使用 DPX 命令,则授权被剥夺,使用时需要重新加载,此值根据需要调整。
5. 客户机 DPX 程序安装:在客户机上运行光盘中的“迪百思(DPX)网络版安装程序.msi ”可根据程序提示逐步进行安装,安装过程同单机版。
正常情况下安装完成即可在 CAD 中加载运行 DPX 程序了。
6. 客户工具程序设置:如果在客户机上 CAD 中不能正常加载运行 DPX 程序或加载时间过长,则需要对客户工具程序进行设置。
在 DICAD PRO 安装路径中找到客户工具(一组)中的 CliTools.exe ,如“C:\Program Files\Dicad Pro\网络版工具程序\客户工具(一组)\ CliTools.exe ”。
如下图对话框:(1)基本设置:服务名必须要和服务程序中的服务名一致,一般不需要修改。
萝卜圈3D机器人客户端安装说明

萝卜圈3D机器人客户端安装说明
1、从教科网中下载客户端安装软件(也可使用萝卜圈公司寄过来的软件)
2、解压后找到,双击。
3、安装步骤截图:
(1)
(2)
(3)
(4)安装路径可修改。
(5)
(6)等待安装完成
(7)
(8)点完成后出现服务器地址修改画面。
修改为:
完成安装
(9)在桌面上找到双击即可运行。
(10)Win7系统或360防火墙可能会出现如下提示,请允许程序执行。
(11)输入用户名及密码即可运行程序。
注:学校用户请选择宁波北仑教育局—内网,如在家庭使用请选择宁波北仑教育局—公网(12)用户帐号密码重新设置
在右下角“重置密码”位置处,各校原始帐号和密码在合同附件的最后一页。
建议密码由教师自行修改,不要叫学生修改,为减少管理工作量,原则上零星密码重置不实时予以解决,局每年统一进行密码重置,特殊情况需要个别用户密码重置的请报李永利老师处。
各校有1500用户数,请妥善做好用户规划。
注:目前北仑网页版面系统正在定制,密码重置时网页页页形式可能会不完善请予以谅解。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一、BDS编程软件安装
1、打开软件安装程序的存放文件夹,找到名为“Setup.exe”的文件。
双击setup文件打开安装程序,
再点“确定”。
(如系统是简体中文系统安装语言需选择中文,如是繁体中文、英文或其它非简体中文的系统,安装语言就必须选择英文语言)
2、输入:BSDWHUT,点击“下一步”,公司名称任意输入,序列号输入:WACW0-BDSR2-2208S,
然后下一步,安装完后会在桌面生产一个名为“博思威龙机器人程序开发”的图标(序列号和密码也可在软件的文件夹中名为“SN”的文本文档中找到)。
3、部分电脑安装完之后如无法正常运行,此时需要打开编程软件安装目录“C:\Program Files\武汉理
工大学物流与机器人研究所\博思威龙机器人程序开发”双击名为“msagent.exe”的文件进行补丁
程序的安装。
二、下载线驱动安装
1、打开驱动程序存放文件夹名为“CP210x_Drivers.exe”的文件。
点击“Next”直到安装完成。
2、打开名为“CP2102”的文件夹。
双击“PreInstaller”,点击弹出框中的“Install”。
一会儿后弹出安装完成的提示框,点确定,完成整个驱动程序的安装。
3、将BDS控制器用配套的USB下载线连接到电脑的USB端口,电脑屏幕右下角会出现找到新硬件提示,等到提示“新硬件已安装并可以使用了”即表示主控盒已经与电脑连接成功。
三、端口设置
1、鼠标右击“我的电脑”选择“管理”。
2、选择左边的“设备管理器”,然后双击右边的“端口(COM和LPT)”。
3、鼠标右击“CP210x USB to UART Bridge Controller (COMX)”,选择属性。
4、点击弹出属性框的“端口设置”标签,设置“每秒位数”为“9600”。
然后点击下面的“高级”,在高级设置框下有一个“COM端口号”,选择COM1-COM4中没有被使用的端口(建议设置为COM1,这样才能使用调试检测功能),然后点击确定。
四、软件操作简介
1、软件界面介绍
双击桌面的“博思威龙机器人程序开发”图标,打开程序,界面如下:
2、模块的简单操作:在模块库找到想要的模块,鼠标单击模块。
再把鼠标移动到绿色的连接点时会有绿色的圆圈出现,这时单击鼠标就可以把模块连接上了。
3、删除模块:将模块拖动到左下角的垃圾箱中,即删除模块。
4、当程序模块过多,界面无法显示时,可拖动垃圾箱上面的按钮将编程区的程序模块缩小,这样就显示出所有模块了。
五、程序下载
先将控制器装好电池,连接好程序下载线,打开主控盒电源。
再打开bds编程软件,点击工具栏上的下载按钮,选择相应的串口,单击“发送”。
显示发送完成即表示下载完成,然后关闭主控盒电源,拨出程序下载线。