VID29步进电机规格书
丝杠步进电机产品手册

LN14H2035-15-4
1.5A/相
1.5欧+/-10% 2.0mH+/-20%
4
LS14H2035-15-4
可选丝杆导程及基本步长
screw Dia. (in) 0.250 0.250 0.250 0.250 0.250 0.250 0.250 0.250 0.250
'$7(
'(%85$1' %5($.6+$53 ('*(6
7,7/(
'21276&$/('5$:,1*
5(9,6,21
',1*6
( 0
$
$&0(/($'6&5(:
丝杆步进电机产品手册
0D[
%
2. 可选螺杆和电机搭配原则。
电机尺寸 (mm)
screw Dia. (in)
20x20 20x20
0.138 0.138
20x20 20x20
0.138 0.138
28x28 28x28
0.188 0.188
28x28 28x28
0.188 0.188
28x28 35x35/42x42
0.188 0.250
LN11H2032-05-4
0.5A/相
10欧+/-10%
LS11H2032-05-4
LN11H203欧+/-10%
LS11H2032-10-4
每相电感 39mH+/-20%
6mH+/-20%
1.5mH+/-20%
(整理)易寒电子步进电机_28BYJ-48介绍
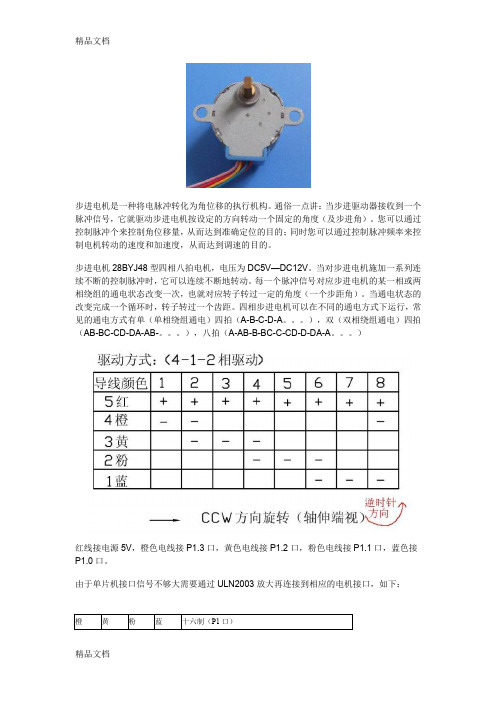
红线接电源5V,橙色电线接P1.3口,黄色电线接P1.2口,粉色电线接P1.1口,蓝色接P1.0口。
{uchar bb;while(aa--){for(bb=0;bb<115;bb++) //1ms基准延时程序{;}}}void delay500us(void){int j;for(j=0;j<57;j++){;}}void beep(void){uchar t;for(t=0;t<100;t++){delay500us();FMQ=!FMQ; //产生脉冲}FMQ=1; //关闭蜂鸣器}void motor_ccw(void){uchar i,j;for(j=0;j<8;j++) //电机旋转一周,不是外面所看到的一周,是里面的传动轮转了一周{if(K3==0){break; //如果K3按下,退出此循环}for(i=0;i<8;i++) //旋转45度{P1=CCW[i];delaynms(10); //调节转速}}}void motor_cw(void){uchar i,j;for(j=0;j<8;j++){if(K3==0){break; //如果K3按下,退出此循环}for(i=0;i<8;i++) //旋转45度{P1=CW[i];delaynms(2); //调节转速}}}void main(void){uchar r;uchar N=64; //因为步进电机是减速步进电机,减速比的1/64 ,//所以N=64时,步进电机主轴转一圈while(1){if(K1==0){beep();for(r=0;r<N;r++){motor_ccw(); //电机逆转if(K3==0){beep();break;}}}else if(K2==0){beep();for(r=0;r<N;r++){motor_cw(); //电机反转if(K3==0){beep();break;}}}elseP1=0xf0; //电机停止}}附:步进电机小知识(转)1.什么是步进电机?步进电机是一种将电脉冲转化为角位移的执行机构。
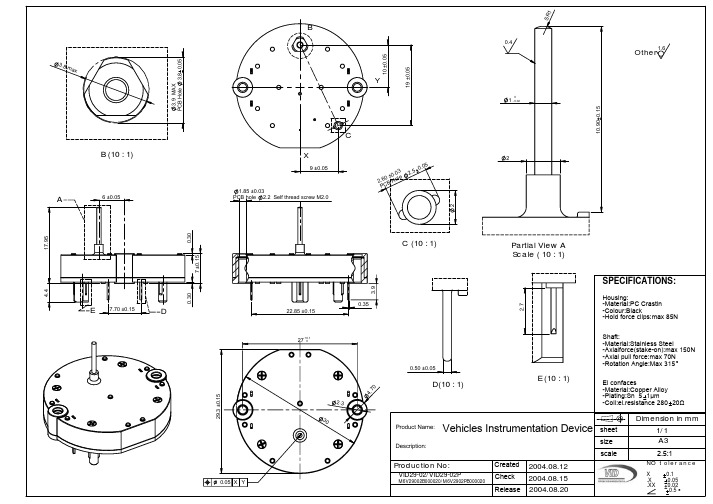
20090905103507VID29仪表步进电机
X
A
4
5.80
7.76 0.1
22.85 ±0.15
C
B
(2.08)
0.35
0.30
0.30
6 ±0.05
2- 1.85 ±0.03 PCB Hole 2.2 Self thread screw M2.0
D
7 ±0.15
4.50
partial view A Scale 6:1
3-3.10 ±0.05 PCB Hole 3
45°
5.3min SR1
0.4
Y
0 1 - 0.02
1.6
Other
10.95 0.15
1.50
4
X
2.50
2.08
22.85 ±0.15
4.50
0.35
A
2- 1.85 ±0.03 PCB hole 2.2 Self thread screw M2.0
27
+0.1 0
8.49 ±0.08
C
30
2.3
size scale
Dimension in mm 1/1 A3
2.5:1
NO tolerance
X
0.1
.X
0.05
.XX 0.02
0.5
D
3.80
1.50
-
0 0.02
10 ±0.05 19 ±0.05
3.90 MAX. PCB Hole 3.8
Y
19.60 ±0.05
版版 生生日日
软软软 档档软
2.50
1.50
10.95 0.15
Other 1.6
29.3 ±0.15 2
三相步进电机产品手册
运动系统控制产品使用手册上海昀研自动化科技有限公司二〇〇九年七月第三版三相步进电机返回目录■ 42mmHB 系列三相步进电机步 距 角(Step Angle) 步距精度(Step Accuracy) 温 升(Temperature Rise) 环境温度(Ambient Temperature Range) 绝缘等级(Insulation Class) 绝缘电阻(Insulation Resistance) 绝缘强度(Dielectric Strength) 径向跳动(radial runout) 轴向间隙(axial clearance) 1.2° ±5% 75℃ Max -20℃~+50℃ B 500VDC 100MΩ Min 500VAC 50Hz 1Ma Minute 0.02mmMax(450g 负载) 0.08mmMax(450g 负载)技术参数(Specifications) 技术参数型号 Model 步距角 机身长 额定电流 驱动器电源输入 保持转矩 Holding torque (N.m) 0.16 0.22 0.32 Step Angle Length Current Power Supply O () L(mm) (A/phase) (A) DC24V 1A DC24V 2A DC24V 1A 重量 转动惯量 适配驱动器 Rotor inertia Weight Matched driver 2 (g.cm ) (kg) 100 220 380 0.23 0.28 0.35 YK3605MA YK3605MA YK3605MA423HB35-153 1.2 35 1.5 423HB40-153 1.2 40 1.5 423HB50-153 1.2 50 1.5 ▲以上仅为代表性产品,可按要求另行制作.外形尺寸(Dimension) 外形尺寸(Dimension)力矩测试数据(仅供参考) 力矩测试数据(仅供参考)注意: ▲ 注意:电机特性数据和技术数据都是在匹配我公司驱动器驱动的情况下测得,测试电压为 28VDC. 电机安装时务必用电机前端盖安装止口定位,并注意公差配合,严格保证电机轴与负载轴的同心度. 电机与驱动器连接时,请勿接错相.1三相步进电机返回目录■ 57mmHB 系列三相步进电机步 距 角(Step Angle) 步距精度(Step Accuracy) 温 升(Temperature Rise) 环境温度(Ambient Temperature Range) 绝缘等级(Insulation Class) 绝缘电阻(Insulation Resistance) 绝缘强度(Dielectric Strength) 径向跳动(radial runout) 轴向间隙(axial clearance) 1.2° ±5% 75℃ Max -20℃~+50℃ B 500VDC 100MΩ Min 500VAC 50Hz 1Ma Minute 0.02mmMax(450g 负载) 0.08mmMax(450g 负载)技术参数(Specifications) 技术参数型号 Model 步距角 机身长 额定电流 驱动器电源输入 保持转矩 Holding torque (N.m) 0.45 0.9 1.5 2.0 Step Angle Length Current Power Supply O () L(mm) (A/phase) (A) DC40V DC40V DC40V DC40V 5A 5A 5A 5A 重量 转动惯量 适配驱动器 Rotor inertia Weight Matched driver 2 (g.cm ) (kg) 100 220 380 530 0.5 0.75 1.1 1.57 YK3605MA YK3605MA YK3605MA YK3605MA573HB41-523 1.2 40.5 5.2 573HB54-523 1.2 53.5 5.2 573HB76-583 1.2 76.4 5.8 573HB102-583 1.2 102 5.8 ▲以上仅为代表性产品,可按要求另行制作.外形尺寸(Dimension) 外形尺寸(Dimension)接线图(Connections) 接线图(Connections)力矩测试数据(仅供参考) 力矩测试数据(仅供参考)测试电机型号 测试条件 转速(转/分) 573HB41-523 573HB54-523 573HB76-583 573HB102-583 573HB41-523,573HB54-523,573HB76-583,573HB102-583 驱动电压:DC40V 600.35N.m配套驱动器型号YKA3606MA驱动器设为 1000 步/转 180 0.33N.m 0.75N.m 1.35N.m 1.6 N.m 240 0.28 N.m 0.73 N.m 1.28N.m 1.45N.m 300 0.25N.m 0.65 N.m 1.09 N.m 1.3 N.m 360 0.23 N.m 0.58 N.m 0.95 N.m 1.25N.m 420 0.20N.m 0.51N.m 0.8 N.m 1.03N.m 480 0.17N.m 0.45N.m 0.77N.m 0.84N.m 540 0.12 N.m 0.40 N.m 0.73 N.m 0.45N.m120 0.33 N.m 0.78 N.m 1.37 N.m 1.65N.m0.8N.m1.37N.m1.7N.m注意: ▲ 注意:电机特性数据和技术数据都是在匹配我公司驱动器驱动的情况下测得,测试电压为 40VDC. 电机安装时务必用电机前端盖安装止口定位,并注意公差配合,严格保证电机轴与负载轴的同心度. 电机与驱动器连接时,请勿接错相.2三相步进电机返回目录■ 86mmHB 系列三相步进电机步 距 角(Step Angle) 步距精度(Step Accuracy) 温 升(Temperature Rise) 环境温度(Ambient Temperature Range) 绝缘等级(Insulation Class) 绝缘电阻(Insulation Resistance) 绝缘强度(Dielectric Strength) 径向跳动(radial runout) 轴向间隙(axial clearance) 1.2° ±5% 75℃ Max -20℃~+50℃ B 500VDC 100MΩ Min 500VAC 50Hz 1Ma Minute 0.02mmMax(450g 负载) 0.08mmMax(450g 负载)技术参数(Specifications) 技术参数型号 Model 步距角 机身长 额定电流 驱动器电源输入 保持转矩 Holding torque (N.m) 2 2 4 4 6 6 Step Angle Length Current Power Supply O () L(mm) (A/phase) (A) 重量 转动惯量 适配驱动器 Rotor inertia Weight Matched driver 2 (g.cm ) (kg) 1320 1320 2400 2400 3800 3480 2 2 3 3 4 4 YKA3606MA YKA3722MA YKA3606MA YKA3722MA YKA3606MA YKA3722MA863HB69-583 1.2 69 5.8 DC40V 5A 863HB69-183 1.2 69 1.75 AC110V 2.5A 863HB97-583 1.2 97 5.8 DC40V 5A 863HB97-203 1.2 97 2 AC110V 2.5A 863HB125-583 1.2 125 5.8 DC40V 5A 863HB125-223 1.2 125 2.2 AC110V 2.5A ▲以上仅为代表性产品,可按要求另行制作.外形尺寸(Dimension) 外形尺寸(Dimension)接线图(Connections) 接线图(Connections)力矩测试数据(仅供参考) 力矩测试数据(仅供参考)测试电机型号 测试条件 转速(转/分) 863HB69-583 863HB97-583 863HB125-583 863HB69-583,863HB97-583,863HB125-583 驱动电压:DC40V 驱动器设为 1000 步/转 60 120 180 240 300 2.1N.m 2.1 N.m 1.9 N.m 1.7 N.m 1.4 N.m 4 N.m 4 N.m 3.5 N.m 3 N.m 2.6 N.m 6 N.m 5.5 N.m 4.8 N.m 3.8 N.m 3 N.m 配套驱动器型号 360 1.3 N.m 2.4 N.m 2.5 N.m 420 1.0 N.m 2 N.m 2.3 N.m YKA3606MA 480 0.8 N.m 1.8 N.m 2.2 N.m 540 0.5 N.m 1.2 N.m 1.7 N.m注意: ▲ 注意:电机特性数据和技术数据都是在匹配我公司驱动器驱动的情况下测得,测试电压为 40VDC. 电机安装时务必用电机前端盖安装止口定位,并注意公差配合,严格保证电机轴与负载轴的同心度. 电机与驱动器连接时,请勿接错相.3三相步进电机返回目录■ 110mmRB 系列三相步进电机步 距 角(Step Angle) 步距精度(Step Accuracy) 温 升(Temperature Rise) 环境温度(Ambient Temperature Range) 绝缘等级(Insulation Class) 绝缘电阻(Insulation Resistance) 绝缘强度(Dielectric Strength) 径向跳动(radial runout) 轴向间隙(axial clearance) 1.2° ±5% 75℃ Max -20℃~+50℃ B 500VDC 100MΩ Min 500VAC 50Hz 1Ma Minute 0.02mmMax(450g 负载) 0.08mmMax(450g 负载)技术参数(Specifications) 技术参数型号 Model 步距角 机身长 额定电流 Current (A/phase) 驱动器电源输入 Power Supply (A) AC220V AC220V AC220V AC220V 3A 3A 3A 3A Step Angle Length O () L(mm) 保持转矩 重量 转动惯量 适配驱动器 Holding torque Rotor inertia Weight Matched driver 2 (g.cm ) (N.m) (kg) 8 12.5 18 22 5000 8400 12600 16800 4.5 9.5 12 13.5 YKA3722MA YKA3722MA YKA3722MA YKA3722MA1103RB121-303 1.2 121 3 1103RB175-303 1.2 175 3 1103RB220-303 1.2 220 3 1103RB250-303 1.2 250 3 ▲以上仅为代表性产品,可按要求另行制作.外形尺寸(Dimension) 外形尺寸(Dimension)接线图(Connections) 接线图(Connections)力矩测试数据(仅供参考 力矩测试数据(仅供参考)测试电机型号 测试条件 转速(转/分) 1103RB121-303 1103RB175-303 1103RB220-303 1103RB250-303 1103RB121-303, 1103RB175-303, 1103RB220-303, 1103RB250-303 配套驱动器型号 驱动电压:AC220V 驱动器设为 1000 步/转 60 120 180 240 300 360 8 N.m 7.8 N.m 7.5 N.m 7 N.m 7 N.m 6.8 N.m 12.5 N.m 11 N.m 9.5 N.m 7 N.m 5.1 N.m 4.5 N.m 22 N.m 22 N.m 20 N.m 18 N.m 13 N.m 12 N.m 25 N.m 23 N.m 21 N.m 18 N.m 15 N.m 12 N.m YKA3722MA 420 N.m N.m N.m N.m6 4 9 8注意: ▲ 注意:电机特性数据和技术数据都是在匹配我公司驱动器驱动的情况下测得,测试电压为 220VAC. 电机安装时务必用电机前端盖安装止口定位,并注意公差配合,严格保证电机轴与负载轴的同心度. 电机与驱动器连接时,请勿接错相.4三相步进电机返回目录■ 110mmHB 系列三相步进电机步 距 角(Step Angle) 步距精度(Step Accuracy) 温 升(Temperature Rise) 环境温度(Ambient Temperature Range) 绝缘等级(Insulation Class) 绝缘电阻(Insulation Resistance) 绝缘强度(Dielectric Strength) 径向跳动(radial runout) 轴向间隙(axial clearance) 1.2° ±5% 75℃ Max -20℃~+50℃ B 500VDC 100MΩ Min 500VAC 50Hz 1Ma Minute 0.02mmMax(450g 负载) 0.08mmMax(450g 负载)技术参数(Specifications) 技术参数型号 Model 步距角 机身长 额定电流 Current (A/phase) 驱动器电源输入 Power Supply (A) AC220V AC220V AC220V AC220V 3.5A 3.5A 3.5A 3.5A Step Angle Length O () L(mm) 保持转矩 重量 转动惯量 适配驱动器 Holding torque Rotor inertia Weight Matched driver 2 (g.cm ) (N.m) (kg) 8 12 16 20 6000 9720 13560 17400 5 6.6 9 11.1 YKA3722MA YKA3722MA YKA3722MA YKA3722MA1103HB125-253 1.2 124.5 2.5 1103HB148-353 1.2 148 3.5 1103HB182-373 1.2 182 3.7 1103HB216-403 1.2 216 4 ▲以上仅为代表性产品,可按要求另行制作.外形尺寸(Dimension) 外形尺寸(Dimension)接线图(Connections) 接线图(Connections)力矩测试数据(仅供参考) 力矩测试数据(仅供参考)测试电机型号 测试条件 转速(转/分) 1103HB125-253 1103HB148-353 1103HB182-373 1103HB216-403 1103HB125-253 , 1103HB148-353 , 1103HB182-373 驱动电压:AC220V 驱动器设为 1000 步/转 60 120 180 240 300 7 N.m 7 N.m 7 N.m 6.5 N.m 6 N.m 12 N.m 12 N.m 12 N.m 12 N.m 12 N.m 15 N.m 15 N.m 15 N.m 14 N.m 13 N.m 19 N.m 19 N.m 18.5 N.m 18 N.m 17 N.m , 配套驱动器型号 420 4.5 N.m 10 N.m 10 N.m 15.5 N.m YKA3722MA 480 4 N.m 9 N.m 9 N.m 15 N.m 540 N.m N.m N.m N.m360 5 N.m 11 N.m 12 N.m 16 N.m3 5 5 6注意: ▲ 注意:电机特性数据和技术数据都是在匹配我公司驱动器驱动的情况下测得,测试电压为 220VAC. 电机安装时务必用电机前端盖安装止口定位,并注意公差配合,严格保证电机轴与负载轴的同心度. 电机与驱动器连接时,请勿接错相.5三相步进电机返回目录■ 130mmHB 系列三相步进电机步 距 角(Step Angle) 步距精度(Step Accuracy) 温 升(Temperature Rise) 环境温度(Ambient Temperature Range) 绝缘等级(Insulation Class) 绝缘电阻(Insulation Resistance) 绝缘强度(Dielectric Strength) 径向跳动(radial runout) 轴向间隙(axial clearance) 1.2° ±5% 75℃ Max -20℃~+50℃ B 500VDC 100MΩ Min 500VAC 50Hz 1Ma Minute 0.02mmMax(450g 负载) 0.08mmMax(450g 负载)技术参数(Specifications) 技术参数型号 Model 步距角 机身长 额定电流 Current (A/phase) 驱动器电源输入 Power Supply (A) AC220V AC220V AC220V AC220V 5A 5A 5A 5A Step Angle Length O () L(mm) 保持转矩 重量 转动惯量 适配驱动器 Holding torque Rotor inertia Weight Matched driver 2 (g.cm ) (N.m) (kg) 23 30 36 50 25000 30000 35000 45500 13 16 18 22 YKA3722MA YKA3722MA YKA3722MA YKA3722MA1303RB168-503 1.2 168 5 1303RB197-503 1.2 197 5 1303RB225-503 1.2 225 5 1303RB280-503 1.2 280 5 ▲以上仅为代表性产品,可按要求另行制作.外形尺寸(Dimension) 外形尺寸(Dimension)接线图(Connections) 接线图(Connections)力矩测试数据(仅供参考) 力矩测试数据(仅供参考)测试电机型号 测试条件 转速(转/分) 1303RB168-503 1303RB197-503 1303RB225-503 1303RB280-503 1303RB168-503 , 1303RB197-503 , 1303RB225-503 驱动电压:AC220V 驱动器电流为额定电流 5A 60 120 180 240 300 20 N.m 20 N.m 19 N.m 18 N.m 17 N.m 26 N.m 25 N.m 23 N.m 22 N.m 20 N.m 33 N.m 29.5 N.m 28 N.m 26 N.m 23 N.m 40 N.m 36 N.m 33 N.m 30 N.m 27 N.m , 配套驱动器型号 驱动器设为 1000 步/转 360 420 16 N.m 14 N.m 11 19 N.m 16 N.m 13 20 N.m 16 N.m 12 23 N.m 20 N.m 17 YKA3722MA 480 N.m N.m N.m N.m 540 9 N.m 11 N.m 8 N.m 14 N.m注意: ▲ 注意:电机特性数据和技术数据都是在匹配我公司驱动器驱动的情况下测得,测试电压为 220VAC. 电机安装时务必用电机前端盖安装止口定位,并注意公差配合,严格保证电机轴与负载轴的同心度. 电机与驱动器连接时,请勿接错相.6。
步进电机28BYJ规格书
一、特点:
此产品为28BYJ系列步进电机,小体积、高转速、底振动。
具有结构紧凑、力矩大、输入功率小、噪音小、使用方便等特点。
二、用途:
产品广泛用于空调器、电动器械、冷暖通阀门、热水器自动调温系统、自动化仪器、舞台灯光、安防视频监控、及单片机学习开发等领域。
三、极限参数:
表1
四、技术参数:
表2
五、 外形尺寸:(单位:mm)
六:接线示意图
接线指示图红5
黄3粉红2
蓝1
橙4
七:分配方式
八:铭牌
1
3245连线 序号--蓝
-
黄粉红橙--红导线 颜色231+++-------64+5++分配顺序
78+
+XXXXXXXXX 060000015表示此产品为2006年生产,编号为0000015
的产品。
)
印刷批号,从0000001开始逐张递增
以当年的年份为编码,如2006年,用06表示XX XXXXXXX
STEP MOTOR
28BYJ-48
5V DC。
步进伺服电机驱动器的技术参数及安装示意图

SS57步进伺服电机驱动器的技术参考手册一、产品简介1.1概述SS57步进伺服电机驱动器是东莞市一能机电技术有限公司全新推出的SS混合伺服系列产品,采用行业最新的Cotex-M4 ARM 核处理器,主频高达80MHz,使得驱动器对外部响应频率最高可达500KHz,用以适配57步进伺服电机,从而使电机具有高精度,快响应,不失步,停止时绝对静止等优良特性,是当前业内同类产品中特性表现极其优异的一款产品。
1.2 SS57特点◆全新Cotex-M4 ARM核技术32位处理器◆主频高达80MHZ◆电机最高空载运行速度达4000转◆电机响应频率最高达500KHZ以上◆输出电流最高达7A ◆细分高达25600◆输入电压最高75VDC ◆双脉冲及脉冲加方向模式切换◆报警复位功能◆脉冲,方向,使能兼容5-24V输入◆丰富的报警及运行显示讯号◆失步报警输出功能1.3 技术参考步进伺服电机驱动器最近几年来在机器视觉,线性模组,广告展示设备,线束设备,自动锁螺丝机等要求快速定位,频繁快速启动以及中高速长距离运动的场合得到了迅速的推广和应用。
东莞市一能机电技术有限公司经过两年多的精心设计,于近期推出的最新款SS步进伺服电机驱动器系列产品,采用行业最新的ARM核M4控制器,主频高达80MHZ,使得电机响应频率最高可达2MHZ,闭环步进电机的空载最高转速可达4000转/分钟或以上!1.4 功能示意图二、电气、机械和环境指标2.1 SS57电气指标2.2 SS57使用环境及参数2.3 SS57机械安装图单位:毫米(mm)图1.安装尺寸图三、SS57步进伺服电机驱动器接口和接线介绍3.1 SS57步进伺服电机驱动器接口与接线示意图3.2 电源输入接口3.3 电机及编码器接口3.4 控制信号接口四、电流、细分、功能拨码开关设定4.1 细分设置拨码4.2 初始方向选择拨码电机初始转动方向通过SW5进行设定。
ON:电机逆时针旋转,OFF:电机顺时针旋转(出厂默认)电机顺时针旋转,当电机顺时针运转时,驱动器LED指示灯按照绿-黄-红-蓝-绿循环闪烁。
步进电机28BYJ48规格书说明书

规格书SUBMISSION OF SPECIFICATION产品名称(PRODUCT NAME ):步进电机产品型号(PRODUCT MODEL ):28BYJ48客户部品号(CUSTOMER PART NUMBER ):28BYJ48编U .确认记载项目:AFFIRM THE FOLLOWING ITEMS 1、电性能及参数:1、ETECTRIC PERFORMANCE AND PROPERTIES2、机械性能:2、MECHANICAL PERFORMANCE AND PROPERTIES3、环境性能:3、ENVIRONMENTAL PERFORMANCE AND PROPERTIES4、使用寿命试验:4、ENDURANCE TEST5、摩擦耐久试验:5、FRICTION MECHANISM ENDURANCE TEST编制校对审核DRAWN CHECKED APPROVED 产品供货单位(SUPPLIER ):产品用户单位(CUSTMER ):用户确认(ACKNOWLEDGEMENT ):于年月日确认此规格书ACKNOWLEDGEMENT DATE :/MONTH /DAY /YEAR确认人(ACKNOWLEDGED ):盖章(SEALED ):规格书(Specification)编制日期(ISSUE DATE):2011.03.22型号(MODEL)28BYJ48图号(DWG.No.)28BYJ48(1)(2)电性能及参数(ELECTRICAL PERFORMANCE AND PROPERTIES)1-1相数4相Number of phase4phase1-2驱动方式1-2相励磁单极驱动Drive mode1-2phase excitation unipolar drive1-3步距角 5.6250/64(输出轴),减速比1/64Step angle(output shaft) 5.6250/64(output shaft),gear reduction ration1/64 1-4电压5VDC(电机端子)Voltage5VDC(motor energized voltage)1-5线圈电阻50Ω±7%/相25℃Resistance per phase50Ω±7%/phase at25℃1-6最大空载牵出频率>900ppsMax response frequency>900pps1-7最大空载牵入频率>500ppsMax starting frequency>500pps1-8牵入转距>300gf.cm/5VDC100ppsPull in torque>300gf.cm/5VDC100pps1-9绝缘电阻(Insulation resistance)在引接线和外壳之间施加500VDC,测得绝缘电阻大于10MΩ。
齿轮减速步进电机产品手册

齿轮减速步进电机产品手册1. 产品介绍齿轮减速步进电机是一种常用于精密控制系统的电机。
它结合了步进电机和齿轮减速装置的优点,能够提供较高的转矩输出和精确的位置控制。
本手册将为您详细介绍齿轮减速步进电机的特点、优势和应用领域。
2. 技术参数齿轮减速步进电机具有以下主要技术参数:- 步距角:通常为1.8度,也有其他选项如0.9度或0.6度可供选择。
- 转矩输出:齿轮减速装置能够大幅增加电机的转矩输出,一般可达到几十至几百牛米。
- 精度:通过减速装置的缓慢运动,步进电机能够提供高精度的位置控制,通常误差在0.1度以内。
- 电源电压:通常为DC 24V,也有其他选项如12V或48V可供选择。
- 驱动方式:可选择驱动器或控制器进行电机的驱动和控制。
3. 产品特点齿轮减速步进电机具有以下几个主要特点:- 高转矩输出:齿轮减速装置能够将步进电机的转速降低,从而大幅增加转矩输出,适用于需要高转矩的应用场景。
- 高精度位置控制:通过减速装置的缓慢运动,步进电机能够提供高精度的位置控制,适用于需要精确定位的应用场景。
- 可靠性和稳定性:齿轮减速步进电机采用高品质的材料和先进的制造工艺,具有较长的使用寿命,并能在恶劣环境下稳定工作。
- 可定制化:根据用户需求,可以按照不同的输入电压、输出转速和转矩等参数进行定制。
4. 应用领域齿轮减速步进电机广泛应用于以下领域:- CNC机床和数控机械:能够提供精确的位置控制和稳定的转速输出,适用于需要高精度加工的机床和机械设备。
- 自动化设备:适用于自动化生产线上的输送带、装配机器人等设备,能够提供稳定的转矩和高精度的位置控制。
- 医疗设备:适用于医疗设备中需要精确控制和定位的部件,如医用机械臂或手术机器人等。
- 机器人技术:适用于各种类型的机器人,如工业机器人、服务机器人或家庭机器人,能够提供精确的位置控制和稳定的转矩输出。
5. 安装和使用注意事项在使用齿轮减速步进电机时,请注意以下几点:- 确保正确的电源电压和驱动器或控制器的匹配。
步进电机手册

1 步进电机和驱动器型号定义------------------------------ 22 步进电机和驱动器适配表------------------------------ 23 3.1 42系列电机------------------------------ 33.2 57系列电机------------------------------ 43.3 86系列电机------------------------------ 5~63.4 110系列电机------------------------------ 74 4.1 VC-M804H驱动器------------------------------ 8~94.2 VC-M806/VC-803驱动器------------------------------ 10~124.3 VC-M1212驱动器------------------------------ 13~165 5.1 电机的串连接线和并联接线------------------------------ 175.2 调整电机的初始化运行方向------------------------------ 175.3 降低电机的温升------------------------------ 175.4 提高电机的转速------------------------------ 175.5 提高电机的精度------------------------------ 1712步进电机和驱动器型号定义步进电机型号定义出线的电机可以接成串联方式以适应低速平稳的要求,接成并联方式以适应高速大力矩的要求,而6出线的电机可以适应恒压型驱动器。
驱动器型号定义备注:由于电网电压波动的原因,请把最高电源电压限制在70VDC ,以保证一定的安全余量步进电机和驱动器匹配表32相混合式步进电机42系列电机绝缘电阻: 500VDC 100M Ω Min 轴向间隙: 0.1~0.3mm 径向跳动: 0.02mm Max 温 升: 65K Max绝缘强度: 550V 50Hz 1Minute 环境温度: -20︒C ~+55︒C 绝缘等级: B型号步距角(︒) 保持转矩 (Nm)静态相电流(A)相电阻 (Ω)相电感 (mH)转动惯量 (g.cm.s 2)重量(Kg)42BH2A33-0541.8 0.22 0.5 3.0 3.6 35 0.22 42BH2A38-126 0.4 1.2 3.0 3.2 54 0.28 42BH2A47-174 0.52 1.7 1.682.5 68 0.35L:42BH2A33-054=33mmL:42BH2A338-126=38mmL:42BH2A47-174=47mm红A +兰A -黑B+绿B-电机白-公共端黄-公共端红A +兰A -黑B+绿B-电机Vinca motor42相混合式步进电机57系列电机绝缘电阻: 500VDC 100M Ω Min 轴向间隙: 0.1~0.3mm 径向跳动: 0.02mm Max 温 升: 65K Max绝缘强度: 550V 50Hz 1Minute 环境温度: -20︒C ~+55︒C 绝缘等级: B型号 步距角(︒) 保持转矩 (Nm)静态相电流(A) 相电阻 (Ω) 相电感 (mH) 转动惯量 (g.cm.s 2) 重量(Kg) 57BH2A41-148 1.80.5 1.41.4 1.4 135 0.4 57BH2A56-288 12.8 0.75 1.2 300 0.7 57BH2A76-288 1.47 2.8 1 2.1 480 1.0 57BH2A76-304231.35.04801.0单位:mmL: 57BH2A41-148=41 L: 57BH2A56-288=56 L: 57BH2A76-288=76 L: 57BH2A76-304=76红A +黄A -蓝C +黑C -橙B+白B -棕D+绿D -电机红A +绿A -黄B+蓝B-电机Vinca motor2相混合式步进电机86系列电机绝缘电阻: 500VDC 100MΩMin轴向间隙: 0.1~0.3mm径向跳动: 0.02mm Max温升: 65K Max绝缘强度: 550V 50Hz 1Minute环境温度: -20︒C~+55︒C绝缘等级:B型号步距角(︒)保持转矩(Nm)静态相电流(A)相电阻(Ω)相电感(mH)转动惯量(g.cm.s2)重量(Kg)86BH2A65-4081.8 3.5 4 0.7 3.9 1000 1.786BH2A80-404540.8 6.61400 2.3 86BH2A118-3089.73 1.211.52700 3.8 86BH2A156-65813 6.50.56 6.44000 5.4安装尺寸图型号L:长度型号L:长度86BH2A65-408 65mm 86BH2A118-308 118mm86BH2A80-404 80mm 86BH2A156-658 156mmVinca motor56红A +黄A -蓝C +黑C -橙B+白B -棕D+绿D -红A +绿A -黄B+蓝B-72相混合式步进电机110系列电机绝缘电阻: 500VDC 100M Ω Min 轴向间隙: 0.1~0.3mm 径向跳动: 0.02mm Max 温 升: 65K Max绝缘强度: 550V 50Hz 1Minute 环境温度: -20︒C ~+55︒C 绝缘等级: B型号步距角(︒) 保持转矩 (Nm)静态相电流(A) 相电阻 (Ω) 相电感 (mH) 转动惯量 (g.cm.s 2) 重量(Kg) 110BH2A100-504 1.812.7 5.0 0.95 15 5500 5.0 110BH2A150-654 21 6.5 1.15 18.9 11000 8.4 110BH2A165-604 26 6.0 0.65 14 13000 9.5 110BH2A200-654306.51.722.51620011.7型号长度:L 红A +绿A -黄B+蓝B-电机110BH2A100-504 100mm 110BH2A150-654 150mm 110BH2A165-604 165mm 110BH2A200-654200mmVinca motorVC-M804H 为等角度恒力矩整半步型驱动器,采用最新专利技术,输出相电流达4A ,输入电源电压24~80VDC ,可驱动42/57/86等规格的二相混合式步进电动机,具有异乎寻常的高速性能,空载转速可以达到3000转/分,是升级传统步进电机的首选产品。
汽车仪表用步进电机(VID29仪表步进电机中文说明书)
page 6
安装建议
VID29 微型马达可靠性试验
温度循环 - 低温:-40°C±2°C - 高温:+105°C±2°C - 保存时间:高低温各 1 Hrs - 温度变化时间:1.5 hrs - 循环次数:50 次 - 马达状态 : 运行状态 - 试验根据 IEC68-2-14 and PF-9688(DaimlerChrysler)标准执行
page 8
机械冲击试验 - 高:1.2m - 方向:X/Y/Z - 马达状态 : 无运行 - 试验根据 IEC68-2-62 and ISO 1413 标准执行
转距和噪音特性
扭矩特性(线圈线径 0.03mm)
噪音特性(线圈线径 0.03mm)
◎2005 Data Instrumentation Technology Ltd.
高温试验 - 温度:+105°C±2°C - 保存时间:168 Hrs - 马达状态 : running - 试验根据 IEC68-2-2 and PF-9688(DaimlerChrysler)标准执行
低温试验 - 温度:-40°C±2°C - 保存时间:48 Hrs - 马达状态 : running - 试验根据 IEC68-2-1 and PF-9688(DaimlerChrysler)标准执行
脉冲序列
1
2
3
4
5
6
1
2
+5V
34
5
线圈电压 0
-5V
一个全步
一个周期一个分步Fra bibliotek一个微步
脉冲细分
◎2005 Data Instrumentation Technology Ltd.
英士达机电——闭环步进、步进电机产品手册

0: 20mm 2: 35mm 4: 42mm 6: 60mm 11: 110mm
1: 28mm 3: 39mm 5: 56mm
8: 85mm
13: 130mm
05
06
/ 09 - 10
SAD
伺服驱动
● 采用DSP(
处理
)芯片,大大加快了 有 的可 性
据的采
处理速
● 应用大规模门阵列电路,使产品 ● 使用 ● 监视功 ● ● 有脉冲 的功 件IPM,使驱动 状态 二 输
25±0.5
技术
伺服电机型 伺服驱动 兰规格 额 额 大 额 转 电阻 电感 电 时间常 环 环 转 常 功 W N.m kgf.cm N.m kgf.cm r/min kg.m2X10-4 N.m/A V/krpm mH ms 结构 规格 征 温 湿 气 kg 殊规格请 英士达机电或代理 洽谈。 Ω 型 YSD13100ASK 130 1000 4.0 40.8 12 122.4 3000 0.85 1.0 72 2.76 6.42 2.32 全封闭, 工作温 YSD13150MSK 130 1500 6.0 61.2 18 183.6 2500 1.26 1.0 65 1.21 3.87 3.26 通风 IP65(不 凝露) , 蚀气体、易燃气体、油污或 8.9 10 尘 11.5 14.4 括轴 分和连 :0~400C,存储温 :-20~800C YSD13200MSK 130 2000 7.7 78.54 22 224.4 2500 1.53 1.03 68 1.01 2.94 3.80 处) YSD13260DSK 130 2600 10 102 25 255 2500 1.94 1.0 70 0.73 2.45 3.36 YSD13380DSK 130 3800 15 153 30 306 2500 2.77 1.11 67 0.49 1.68 3.43 SDA10-MF30-100 SDA10-MF30-150 SDA10-MF30-200 SDA10-MF30-260
步进电机规格书(英文)

BLK
1
–
+
+
–
2
–
+
–
+
3
+
–
–
+
4
+
–
+
–
A BRW
BI POLAR
B
B
ORG
YEL
CW Rotation Facing Mounting End
Coil Connectors attached to the motor are force inserted and cannot be removed.
Torque (10-4 N.m)
MS70 P/O
MS70 P/I 10
8
6
4
2
0
0
500
1000
1500 2000
2500
3000
Frequency (PPS)
NMB Technologies Corporation 41
pm PM15S-020
Note: See page 38 for options on pin exit angle (θ).
Cutaway used to show internal components
7
3
3. Three different types of permanent
magnets are available.
Ferrite Plastic Magnet
5
Ferrite Sintered Magnet
Nd-Fe-B Bonded Magnet
Model Specifications
Reference Characteristics
步进电机手册
1 步进电机和驱动器型号定义------------------------------ 22 步进电机和驱动器适配表------------------------------ 23 3.1 42系列电机------------------------------ 33.2 57系列电机------------------------------ 43.3 86系列电机------------------------------ 5~63.4 110系列电机------------------------------ 74 4.1 VC-M804H驱动器------------------------------ 8~94.2 VC-M806/VC-803驱动器------------------------------ 10~124.3 VC-M1212驱动器------------------------------ 13~165 5.1 电机的串连接线和并联接线------------------------------ 175.2 调整电机的初始化运行方向------------------------------ 175.3 降低电机的温升------------------------------ 175.4 提高电机的转速------------------------------ 175.5 提高电机的精度------------------------------ 1712步进电机和驱动器型号定义步进电机型号定义出线的电机可以接成串联方式以适应低速平稳的要求,接成并联方式以适应高速大力矩的要求,而6出线的电机可以适应恒压型驱动器。
驱动器型号定义备注:由于电网电压波动的原因,请把最高电源电压限制在70VDC ,以保证一定的安全余量步进电机和驱动器匹配表32相混合式步进电机42系列电机绝缘电阻: 500VDC 100M Ω Min 轴向间隙: 0.1~0.3mm 径向跳动: 0.02mm Max 温 升: 65K Max绝缘强度: 550V 50Hz 1Minute 环境温度: -20︒C ~+55︒C 绝缘等级: B型号步距角(︒) 保持转矩 (Nm)静态相电流(A)相电阻 (Ω)相电感 (mH)转动惯量 (g.cm.s 2)重量(Kg)42BH2A33-0541.8 0.22 0.5 3.0 3.6 35 0.22 42BH2A38-126 0.4 1.2 3.0 3.2 54 0.28 42BH2A47-174 0.52 1.7 1.682.5 68 0.35L:42BH2A33-054=33mmL:42BH2A338-126=38mmL:42BH2A47-174=47mm红A +兰A -黑B+绿B-电机白-公共端黄-公共端红A +兰A -黑B+绿B-电机Vinca motor42相混合式步进电机57系列电机绝缘电阻: 500VDC 100M Ω Min 轴向间隙: 0.1~0.3mm 径向跳动: 0.02mm Max 温 升: 65K Max绝缘强度: 550V 50Hz 1Minute 环境温度: -20︒C ~+55︒C 绝缘等级: B型号 步距角(︒) 保持转矩 (Nm)静态相电流(A) 相电阻 (Ω) 相电感 (mH) 转动惯量 (g.cm.s 2) 重量(Kg) 57BH2A41-148 1.80.5 1.41.4 1.4 135 0.4 57BH2A56-288 12.8 0.75 1.2 300 0.7 57BH2A76-288 1.47 2.8 1 2.1 480 1.0 57BH2A76-304231.35.04801.0单位:mmL: 57BH2A41-148=41 L: 57BH2A56-288=56 L: 57BH2A76-288=76 L: 57BH2A76-304=76红A +黄A -蓝C +黑C -橙B+白B -棕D+绿D -电机红A +绿A -黄B+蓝B-电机Vinca motor2相混合式步进电机86系列电机绝缘电阻: 500VDC 100MΩMin轴向间隙: 0.1~0.3mm径向跳动: 0.02mm Max温升: 65K Max绝缘强度: 550V 50Hz 1Minute环境温度: -20︒C~+55︒C绝缘等级:B型号步距角(︒)保持转矩(Nm)静态相电流(A)相电阻(Ω)相电感(mH)转动惯量(g.cm.s2)重量(Kg)86BH2A65-4081.8 3.5 4 0.7 3.9 1000 1.786BH2A80-404540.8 6.61400 2.3 86BH2A118-3089.73 1.211.52700 3.8 86BH2A156-65813 6.50.56 6.44000 5.4安装尺寸图型号L:长度型号L:长度86BH2A65-408 65mm 86BH2A118-308 118mm86BH2A80-404 80mm 86BH2A156-658 156mmVinca motor56红A +黄A -蓝C +黑C -橙B+白B -棕D+绿D -红A +绿A -黄B+蓝B-72相混合式步进电机110系列电机绝缘电阻: 500VDC 100M Ω Min 轴向间隙: 0.1~0.3mm 径向跳动: 0.02mm Max 温 升: 65K Max绝缘强度: 550V 50Hz 1Minute 环境温度: -20︒C ~+55︒C 绝缘等级: B型号步距角(︒) 保持转矩 (Nm)静态相电流(A) 相电阻 (Ω) 相电感 (mH) 转动惯量 (g.cm.s 2) 重量(Kg) 110BH2A100-504 1.812.7 5.0 0.95 15 5500 5.0 110BH2A150-654 21 6.5 1.15 18.9 11000 8.4 110BH2A165-604 26 6.0 0.65 14 13000 9.5 110BH2A200-654306.51.722.51620011.7型号长度:L 红A +绿A -黄B+蓝B-电机110BH2A100-504 100mm 110BH2A150-654 150mm 110BH2A165-604 165mm 110BH2A200-654200mmVinca motorVC-M804H 为等角度恒力矩整半步型驱动器,采用最新专利技术,输出相电流达4A ,输入电源电压24~80VDC ,可驱动42/57/86等规格的二相混合式步进电动机,具有异乎寻常的高速性能,空载转速可以达到3000转/分,是升级传统步进电机的首选产品。
步进电机说明书
混合式步进电机(BYG系列)步进电机是一种将电脉冲信号转换成角位移的执行元件,可在宽广的范围内调速。
在负载能力范围内,其输出转角定位精度无积累误差,特别适合于开环数控系统。
混合式步进电机是一种兼有反应式和永磁式两种步进电机优点的新型电机,国外主流品种,国内也已大面积取代反应式步进电机成为市场热点。
五相及三相混合式步进电机因其分辨率小,精度高,低频无振荡,高频力矩大,而成为混合式步进电机中的佼佼者。
一、特点本公司自行研制的BYG系列混合式步进电机,结合国内外先进技术而设计,采用优质材料和精良工艺制造,实行严格的质量管理,在国内处于领先水平,可与国外同类电机媲美。
其显著特点是:1、采用优质冷轧高矽片,无机壳铆压,大大改善了磁性能;电机体积小,驱动电流和功耗小,力矩大,运行频率高,动态特性好,温升低。
本公司产品的静态及动态力矩较国内同类产品高出一档次。
2、有良好的内部阻尼特性,运行平稳,无明显低频振荡区。
3、造型美观,结构牢固,噪音低,可靠性高,使用寿命长。
4、品种齐全,系列完整,可满足各种使用场合。
正广泛应用于各类机床,切割机,轻工、印刷、包装、纺织、环保、医疗机械,航空航海设备,汽车,机器人,舞台灯光控制、广告设备,电脑绣花机等自动控制领域。
二、型号含义110 BYG 5 5 0 1 WB特殊型或派生号,以字母表示,无此项时为基本型(Z为增强型,WB为五边型,D为双轴伸,其它为派生型)规格号:1号转子齿数:50齿相数:5相混合式步进电机(FHB为方形混合式步进电机)机座号:外径φ110mm三、产品系列及性能参数1.方形电机系列2.圆形电机系列注:1、打 * 者为正在开发的新产品,可供期货;型号后有“Z”者为增强型。
2、二相电机为四引出线,四相电机为八引出线,除出线方式不同外,其余参数性能完全一样,配本公司驱动电源时用二相电机。
四相电机可改接成二相电机,有串联、并联及单极性三种接法,按并联接法时,相电流应加倍,四相电机用并联接法时,高速性能要优于其它接法。
VID29chinese
600
Hz
机械性能
动态力矩
静态力矩 输出轴转动惯量
减速比 全步模式下步距 分步模式下步距 微步模式下步距
齿隙回程差
M200 M400
Ms Jm
fa=200Hz fa=400Hz
Ub=5V
1.0
1.2
1.3
mNm
0.7
0.85
1.0
mNm
3.5
4.0
mNm
4.225 E-7
Kgm2
1:180
1
Degree
电流峰值幅度一般在 12.9mAt 16.07mA 之间。
1
4
UL
UR
2
3
VID29_××P
Clockwise( VID29_××P) CounterClock wis e(VID2 9 _ ××)
CounterClock wis e(VID2 9 _ ××P) Clock wis e(VID2 9 _ ××)
◎2005 Data Instrumentation Technology Ltd.
page 4
引脚连接
VID29 系列产品回流焊模块(驱动电机连接器)
专利产品:200420084199.2
简介
VID29 回流焊模块(驱动电机连接 器) 是 VID29 系列汽车仪表马达 的一个可选模块。.由特殊的材料 和镀层制作的模块可以直接进入 回流焊炉,从而有效的避免了 VID 系列马达在安装到 PCB 板过程中 手工焊接电极脚的繁琐工作, 同时,专业特殊外形和电极脚的设 计保证本系统可以完全通过汽车 行业要求的的各项震动测试。 毫无疑问,VID29 回流焊模块是一 个有效降低成本提高质量的解决 方案。
步进电机规格种类型号大全步进伺服
步进电机规格种类型号大全 - 步进伺服以下是电工论坛对步进电机驱动系统所做的较为完整的表述:1、系统常识:步进电机和步进电机驱动器构成步进电机驱动系统。
步进电机驱动系统的性能,不但取决于步进电机自身的性能,也取决于步进电机驱动器的优劣。
对步进电机驱动器的争辩几乎是与步进电机的争辩同步进行的。
2、系统概述:步进电机是一种将电脉冲转化为角位移的执行元件。
当步进电机驱动器接收到一个脉冲信号(来自把握器),它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。
3、系统把握:步进电机不能直接接到直流或沟通电源上工作,必需使用专用的驱动电源(步进电机驱动器)。
把握器(脉冲信号发生器)可以通过把握脉冲的个数来把握角位移量,从而达到精确定位的目的;同时可以通过把握脉冲频率来把握电机转动的速度和加速度,从而达到调速的目的。
4、用途:步进电机是一种把握用的特种电机,作为执行元件,是机电一体化的关键产品之一,随着微电子和计算机技术的进展(步进电机驱动器性能提高),步进电机的需求量与日俱增。
步进电机在运行中精度没有积累误差的特点,使其广泛应用于各种自动化把握系统,特殊是开环把握系统。
5、步进电机按结构分类:步进电机也叫脉冲电机,包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)等。
(1)反应式步进电机:也叫感应式、磁滞式或磁阻式步进电机。
其定子和转子均由软磁材料制成,定子上均匀分布的大磁极上装有多相励磁绕组,定、转子周边均匀分布小齿和槽,通电后利用磁导的变化产生转矩。
一般为三、四、五、六相;可实现大转矩输出(消耗功率较大,电流最高可达20A,驱动电压较高);步距角小(最小可做到六分之一度);断电时无定位转矩;电机内阻尼较小,单步运行(指脉冲频率很低时)震荡时间较长;启动和运行频率较高。
(2)永磁式步进电机:通常电机转子由永磁材料制成,软磁材料制成的定子上有多相励磁绕组,定、转子周边没有小齿和槽,通电后利用永磁体与定子电流磁场相互作用产生转矩。
电子步进马达驱动器技术参数手册说明书

C6
3-pin plug with screw connection, MC 1.5/3 - ST - 3.5
C3
4-pin plug with screw connection, MC 1.5/4 - ST - 3.5
C7, C9
7-pin plug with screw connection, MC 1.5/7 - ST - 3.5
- Can be used with motors with a 1.8° base angle, 200 pulses/rev.;
- Step Mode settable in various ways: Full Step, Half Step, 1/4, 1/8, 1/16 of step;
- Integrated linear position transducer by connecting directly to the analogue output;
MOTOR
ACTUATOR
TECHNICAL DATA TECHNICAL DATA
TECHNICAL DATA TECHNICAL DATA
4 www.metalwork.eu
Dimensions and data shown in this catalogue are subject to variations at any time without prior notice
(DIN EN 50022)
Weight [g] 30
TECHNICAL DATA TECHNICAL DATA
Note: Individually packed with 2 screws M4x10, 1 M6x16 grub screw
最新步进电机产品说明书

·可设定为两相和五相电机步 /转,替代两相和五相电机。
·定位精度更高 ,在 10000 步 /转时每步都能精确运动和定位 ,而且输出扭
矩不下降。 ·电机和驱动器间仅用
能性。
3 根线 ,同交流异步电机一样 ,减少连线出错的可
·驱动器与上位机间连线简单 ,都是三根线 ,可高电平或低电平有效。
·低速无爬行、噪音小、几乎无共振、低速性能可与高档伺服的性能相
方毫米的铜线与机器接地 ,地线必须在驱动器 PE 端子上拧紧 ,另一端固定在
开关柜壳体地线上。地线连接处不能有锈、漆、油
,要大面积接触 ,确保良好
的导电性。所有接地线均采用星形接法 (经过一个公共接地点接地 )。
1.1.2.2 安装环境 驱动器要安装在开关柜中 (壁挂式 )。其周围要有 20mm 的空间 ,不能放在
不能结露 , 不能有水珠 禁止有可燃气体和大量导电灰尘
1.2.2 WD3-007 的主要特点
·交流伺服工作原理 ,交流伺服运行特性 ,三相正弦电流驱动输出。
·只要环境温度不超过 55℃,驱动器就能够正常工作。
·电路板采取三防处理 ,有过热、过压、欠压、过流及电机相间短路保
护功能。
·驱动器的输入电源是 220VAC, 变化范围是 :-30%~+20% 。
1.4.3 连线及参数设 置 …………………………………………………………………
1.4.4 控制信号接 口 ……………………………………………………………………
1.4.5 功能选 择 …………………………………………………………………………
1.4.6 功率接 口 …………………………………………………………………………
注意 :最好采用推拉式控制信号 ,这样噪声更小。
步进电机参数及含义

步进电机参数及含义步进电机参数及含义1、步进角:当步进驱动器接收到一个脉冲信号,它所驱动步进电机按设定的方向转动的一个固定角度。
2、保持转矩(HOLDING TORQUE):保持转矩(HOLDING TORQUE)是指步进电机通电但没有转动时,定子锁住转子的力矩。
它是步进电机最重要的参数之一,通常步进电机在低速时的力矩接近保持转矩。
由于步进电机的输出力矩随速度的增大而不断衰减,输出功率也随速度的增大而变化,所以保持转矩就成为了衡量步进电机最重要的参数之一。
比如,当人们说2N.m 的步进电机,在没有特殊说明的情况下是指保持转矩为2N.m的步进电机。
3、 DETENT TORQUE:DETENT TORQUE是指步进电机没有通电的情况下,定子锁住转子的力矩。
DETENT TORQUE在国内没有统一的翻译方式,容易使大家产生误解;由于反应式步进电机的转子不是永磁材料,所以它没有DETENT TORQUE。
4、精度:一般步进电机的精度为步进角的3-5%,且不累积。
5、空载启动频率:步进电机有一个技术参数:空载启动频率,即步进电机在空载情况下能够正常启动的脉冲频率,如果脉冲频率高于该值,电机不能正常启动,可能发生丢步或堵转。
在有负载的情况下,启动频率应更低。
如果要使电机达到高速转动,脉冲频率应该有加速过程,即启动频率较低,然后按一定加速度升到所希望的高频(电机转速从低速升到高速)。
6、四相混合式步进电机与驱动器的串联接法和并联接:四相混合式步进电机一般由两相驱动器来驱动,因此,连接时可以采用串联接法或并联接法将四相电机接成两相使用。
串联接法一般在电机转速较的场合使用,此时需要的驱动器输出电流为电机相电流的0.7倍,因而电机发热小;并联接法一般在电机转速较高的场合使用(又称高速接法),所需要的驱动器输出电流为电机相电流的1.4倍,因而电机发热较大。
7、纹波电压:纹波电压一般是指直流电源输出端含有交流电压是多少V,属称纹波电压或纹波系数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
脉冲序列
1
2
3
4
5
6
1
2
+5V
34
5
线圈电压 0
-5V
一个全步
一个周期
一个分步
一个微步
脉冲细分
©2006 伟力驱动技术(深圳)有限公司 邮箱: @ | 网址: /
极限参数
型号:VID29-XX/XXP 版本:2
分步驱动模式脉冲序列
比特图
引脚 1
引 脚 2,3
引脚 4
脉冲序列
1 23 456 123 45 1 0 1 0 1 0
线 圈 电 压 UL 0
顺 时 针 ( VID29_××P) 逆 时 针 (VID29_××)
逆 时 针 (VID29_××P) 顺 时 针 (VID29_××)
1
4
UL
UR
2
3
VID29_××P
湿度储存试验
- 温度: 65℃±2℃ - 湿度:95±2%RH - 保存时间:144 Hrs - 电机状态: 无运行 - 参考标准: IEC68-2-3
高温运行试验
- 温度:+105℃±2℃ - 保存时间:168 Hrs - 电机状态:运行 -参考标准: IEC60068-2-2
低温试验
- 温度:-40℃±2℃ - 保存时间:48 Hrs - 电机状态:运行 - 参考标准: IEC60068-2-1
150 70 12 1000
N N N Rad/s2
Unit: Unm.
噪音特性:微步模式,MAX工作电压Ub=4.2V
Unit: dB.
©2006 伟力驱动技术(深圳)有限公司 邮箱: @ | 网址: /
Step6 Step5 Step4
Step3
P ulse ( i)
6.67 3.33
Step2 Ste p1
P ulse ( i+ 4 )
0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24
-Step1 3.33
-Step2
型号:VID29-XX/XXP 版本:2
页码:9 of 10
机械振动试验
- 振动波形:正弦波 - 振动频率: 10Hz~200Hz (对数扫频) - 扫描周期: 300 秒 - 振动方向: X,Y轴 - 保持时间: 每个方向保持8小时 - 加速度: 6g - 电机状态: 运行 - 参考标准: IEC68-2-6. 频率变化曲线:
CounterClock wis e(VID2 9 _ ××P) Clock wis e(VID2 9 _ ××)
1
4
UL
UR
2
3
VID29_××
电机加减速
在应用时,因步进电机本身的齿系惯量和指针负载惯量,使电机在加减速时需满足一定时间的加 减速过程,以避免电机丢步。
电机加减速的一个典型的应用是汽车仪表的上电回零。大多数汽车仪表采用电机的内部机械挡块 来定义指针的零位,并普遍采用满刻度回零的方式让仪表指针回零。为让指针平稳安静地回到零 位,并在触到电机内部挡块时不致产生剧烈的抖动,需要将指针加速到较高的角速度(约500度/ 秒),以下是一个加速过程的示例:
©2006 伟力驱动技术(深圳)有限公司 邮箱: @ | 网址: /
型号:VID29-XX/XXP 版本:2
页码:8 of 10
1
4
UL
UR
2
3
VID29_××P
Clockwise( VID29_××P) CounterClock wis e(VID2 9 _ ××)
VID29系列步进电机需要两路逻辑脉冲信号驱动,可以工作于5V~10V 的脉冲下,输出轴的步 距角最小可以达到1/12°,最大角速度600°/S。可用分步模式或微步模式驱动。
VID29系列步进电机分为两大产品系列,分别是VID29-XX / VID29-XXP,电机在设计上选用高 级铁磁材料和特种耐磨塑料,同时兼顾到防火等安全性能,采用具有消声和耐磨效果的特殊齿形,保 证了电机的长期运转寿命和性能。
型号:VID29-XX/XXP 版本:2
页码:1 of 10
VID29系列步进电机
简介
VID29系列步进电机是一种精密的微型步进电机,内置减速比180/1的齿轮系,主要应用于车辆 的仪表指示盘,也可以用于其它仪器仪表装置中,将数字信号直接准确地转为模拟的显示输出。已分 别获得中国专利(No.ZL02289107.2)和美国专利(No. US6903469B2)。
特点
工作电压范围:5V~10V。 低功耗:<20mA,5V。 工作环境温度:-40℃~105℃。 精薄设计,外尺寸:Φ30mm×7.0mm。 高精度:步距角最小可达到1/12º。 长寿命:特殊耐磨材料和齿形设计。
典型应用
马达
信号
数据采集和处理
驱动
电路
0
20
10
30
数据显示 数字显示的准确性与模拟显示的直观性的完美结合。
50
60
5
10
1000
15 3000
20
25
4000
30 6000
负载指针的转动惯量为2.5*10 −7 kgm2
Time (ms) angle of pointer angle of rotor
©2006 伟力驱动技术(深圳)有限公司 邮箱: @ | 网址: /
©2006 伟力驱动技术(深圳)有限公司 邮箱: @ | 网址: /
型号:VID29-XX/XXP 版本:2
页码:2 of 10
功能原理
VID29-XX / VID29-XXP步进电机是两相步进电机经三级齿轮减速转动输出的。电机的工作 原理如图示:
6.67
10
-Step3
1 3 .3 3 1 6 .6 7
-Step4 -Step5-Step6
20 i
CLeufrt ren左t 线in 圈th电 e l流 eft coil CRuigrhrten右t 线 in 圈the电r流ight coil
电流峰值幅度一般在12.9mAt 16.07mA之间。
应用指南
指针参数:
尺寸 重量 转动惯量 偏心度
型号:VID29-XX/XXP 版本:2
页码:6 of 10
最小值
典型 50mm 2.5g
2 ×10−7 kgm2
0.01mNm
建议最大值(*) 80mm 10g
20 ×10−7 kgm2
0.025mNm
驱动和控制要求
分步驱动模式
用标准的5V逻辑电路电压,可以以分步驱动模式直接驱动电机,电流需求小于20mA。在分 步模式下,每个脉冲可以驱动电机转子转动60。(即输出轴转动1/3度)。电机转动的方向取决于 施加在电机左右线圈上的周期性脉冲序列的相位差。如下图所示,左线圈电压UL相位超前于右线 圈电压UR时(相位差为π/3),VID29-XXP系列的电机输出轴将顺时针旋转,而VID29-XX系列 的电机转向相反,将逆时针旋转。
VID29 微型电机可靠性试验
温度循环
- 低温:-40℃±2℃ - 高温:+105℃±2℃ - 保存时间:高低温各1 Hrs - 温度变化时间:参考右图 - 循环次数:50 次 - 电机状态: 运行状态 - 参考标准: IEC60068-2-14
温度冲击试验
- 低温:-40℃±2℃ - 高温:+105℃±2℃ - 保存时间:30分钟/次 - 温度变化时间: 少于30秒 - 循环次数:100次 - 电机状态: 无运行 -参考标准: IEC60068-2-14
页码:3 of 10
驱动电压(Ub).......................................................... ......................10V 电磁干扰 (EMI) (1 kHz;AM 80%; 100 kHz - 2 GHz) .....................80 V/m 焊接温度 (10 sec).........................................................................260 ºC
引脚连接
线圈示意图
线圈示意图
型号:VID29-XX/XXP 版本:2
页码:5 of 10
VID29-XX引脚连接
正装
1
41
2
32
背装
4
3
VID29-XXP引脚连接
正装
1
41
2
32
背装
4
3
安装建议
©2006 伟力驱动技术(深圳)有限公司 邮箱: @ | 网址: /
线 圈 电 压 UR 0
1
4
UL
UR
2
3
VID29_××
©2006 伟力驱动技术(深圳)有限公司 邮箱: @ | 网址: /
分步模式驱动电路
VDD
型号:VID29-XX/XXP 版本:2
页码:7 of 10
电气和机械性能
默认条件为:室温25ºC,微步模式,MAX工作电压Ub=4.2V,
参数 电气性能
工作环境温度 线圈电阻 消耗电流 启动频率
最大驱动频率 机械性能
动态力矩 静态力矩 输出轴转动惯量
减速比 全步模式下步距 分步模式下步距 微步模式下步距
齿隙回程差 噪音
噪音(实测参考值)
抖动
符号 Ta Rb Im fss fmm
UL
1
2
UR
3
4
GND
微步驱动模式
梯度脉冲序列产生接近正弦波的驱动信号可以使电机工作在微步模式下,一个微步就是指转子转 动15º(输出轴转动1/12º)。在微步模式下,电机能更连续、平稳地运转。