文献翻译-悬架性能测试
汽车悬架性能测试系统的研究与设计

汽车悬架性能测试系统的研究与设计
陈广秋;孙蕙莲
【期刊名称】《长春理工大学学报(自然科学版)》
【年(卷),期】2009(032)003
【摘要】汽车悬架性能测试是机动车安全运行检测中的一个重要项目.本文在建立检测车辆悬架振动力学模型和运动方程的基础上,分析并确定了悬架性能的评价指标.针对汽车悬架测试台的基本结构和受力过程,设计了高精度力传感器和速度传感器输出信号的调理模块.采用工业控制计算机直接采集车轮垂直接地力与激振台面频率,提高了测试系统的精度和实时性.实测证明,该系统完全能够满足汽车悬架性能测试时的动态要求,具有较高的可靠性.
【总页数】5页(P388-392)
【作者】陈广秋;孙蕙莲
【作者单位】长春理工大学,电子信息工程学院,长春,130022;长春理工大学,电子信息工程学院,长春,130022
【正文语种】中文
【中图分类】TP274+.2
【相关文献】
1.汽车悬架减振器活塞杆弯断力学性能测试系统 [J], 李明杰
2.基于自动驱动控制的EPS性能教学测试系统的研究与设计 [J], 钱礼闰;张作勇;章飞
3.三缸泵性能测试系统的研究与设计 [J], 王亚林;寇德万;曹京兰;张亮;杜健
4.多旋翼无人驾驶航空器飞行性能测试系统研究与设计 [J], 吴瑞玉;程晨;丁频一;高建明
5.汽车悬架性能测试方法及测试系统研究 [J], 刘玉梅;苏建;翟乃斌;欧阳新;李胜林因版权原因,仅展示原文概要,查看原文内容请购买。
汽车悬架性能检测方法及设备研究

汽车悬架,具有缓和路面不平整而引起震动、冲击的作用,从而更好地保证汽车出行的安全;当汽车悬梁出现故障时,直接对其汽车行驶的稳定安全造成一定的影响,同时也会导致其他构件的磨损,使汽车的使用寿命大大降低,甚至出现制动跑偏等情况的出现,对此加强悬架系统的检查维修,是非常有必要的。
1 汽车悬梁悬梁系统,由避震器、悬架弹簧、防倾杆等构件组成,对其车身、车轮、车架起到连接的作用。
当汽车在不平整路面上行驶时,会产生一定的震动,此时产生的震动,会被车轮、悬架装置吸收,从而保证汽车平稳行驶。
悬梁系统看似是一个简单的体系,但实际上又是一个相互独立的体系,对此一般都不会轻易的达到完美汽车的装配要求。
2 检测方法与标准2.1 检测方法车轮悬架系统,自身在制动惯性力影响下,存在规律性的振动衰减;当其构件性能下降,会使其振动过程出现不同程度的变化;对此为了更好地了解汽车悬架系统技术情况,需要对其各部件受到的垂直力变化进行合理分析。
悬架特性检测,需要采用悬架振动实验,对其振幅、吸收率、左右轮吸收率差三点内容进行检测。
以激振角度,对其悬架减振性能检测方式进行分析,包括按压车体法、跌落法、制动法、共振法四种方法。
(1)按压车体法。
此方法的主要工作性质,是通过检测装置,将其车体压缩到指定极限,然后突然释压,此时的车体,在回弹的过程中,会产生衰减振动,再利用光脉冲测量装置,对其震动值进行记录;采取数学模型,对其阻尼值进行计算后,跟指定的厂家标准曲线做对比,从而掌握其阻尼状况。
(2)跌落法。
应用中首先要通过力传感器,对其台面上施加的压力进行测量,分析其离散压力波形,与其指定标准减振性能曲线,进行一系列的对照,然后再进行性能评估;但是此方面的应用,具有一定的局限性。
(3)制动法。
采用次方法进行检测,为了使其性能检测结果更加接近实际,常会采取平板式结构,进行汽车悬架性能检测方法及设备研究李健(浙江省方正校准有限公司,浙江 杭州 310018)摘要:随着交通条件的不断改善,汽车数量、行驶速度、行驶性能等,都在逐渐增加;而随着人们生活质量的提高,对于高速运行下的安全性能更加重视,但是影响其安全性的原因很多,但归其原因,制动性、操作稳定性因素比例较大,同时这两方面与汽车悬架关系较大;对此本文就汽车悬架性能检测方法及设备,结合其检测标准等内容进行分析,希望对于我国汽车行业的稳定发展,起到积极促进的意义。
第十二章 汽车悬架性能检测
(二) 悬架检测台检测
随着科学技术的发展, 随着科学技术的发展,出现了对在用汽车悬架实 现快速、不解体检测的汽车悬架检测台。 现快速、不解体检测的汽车悬架检测台。由于悬架中 除减振器外的其他零部件大多不易损坏, 除减振器外的其他零部件大多不易损坏,且能通过人 工外观检查法进行检查,而减振器易于损坏, 工外观检查法进行检查,而减振器易于损坏,且其故 障只有一部分能通过人工外观检查法进行检查, 障只有一部分能通过人工外观检查法进行检查,而更 多的其它故障很难用人工外观检查法作出准确的定量 判断,如减振器的外筒有较多油迹, 判断,如减振器的外筒有较多油迹,假如是动力转向 油泵漏在上面的,则用人工外观检查法就会得出不正 油泵漏在上面的, 确的判断。其次, 确的判断。其次,由于减振器的阻尼能力会在使用中 逐减衰减,当其达到某个限值时,减振器就需要更换。 逐减衰减,当其达到某个限值时,减振器就需要更换。 检测台对减振器阻尼能力可进行定量检测。所以, 检测台对减振器阻尼能力可进行定量检测。所以,汽 车悬架检测台又称为汽车悬架减振器检测台。 车悬架检测台又称为汽车悬架减振器检测台。
二、 减振器检测台的型式及特点
(一)按压车体式
1.支架 2.电动机 3.推杆 4.凸轮 5.汽车保险杠 1.支架 2.电动机 3.推杆 4.凸轮 5.汽车保险杠 6.水平导轨 7.垂直导杆 8,9.光脉冲测量装置 6.水平导轨 7.垂直导杆 8,9.光脉冲测量装置
车身压缩量与汽车实际行驶时静态与动态的载荷引 起的压缩量相等。压到最低点时推杆松开, 起的压缩量相等。压到最低点时推杆松开,则车身回弹 并作衰减运动。此时, 并作衰减运动。此时,传感器测得振动波形的两个相邻 振动峰值,按指数衰减规律求得阻尼值, 振动峰值,按指数衰减规律求得阻尼值,并与厂家值或 有关标准对照,以评价减振器的性能。 有关标准对照,以评价减振器的性能。传感器可采用位 移传感器、激光测距仪、转角传感器等多种形式。 移传感器、激光测距仪、转角传感器等多种形式。 这种方法仅对整根车轴的减振效果作出评价, 这种方法仅对整根车轴的减振效果作出评价,不能 对同一车轴的各个减振器的减振效果分别做出评价, 对同一车轴的各个减振器的减振效果分别做出评价,这 样在两个减振器一好一坏的情况下,不能准确判断。 样在两个减振器一好一坏的情况下,不能准确判断。 其特点是:占地较小,操作简便,但需推杆的水平 其特点是:占地较小,操作简便, 和垂直驱动装置,用于调节推杆位置以压到车体上。 和垂直驱动装置,用于调节推杆位置以压到车体上。
汽车悬架检测技术研究综述
0 引言
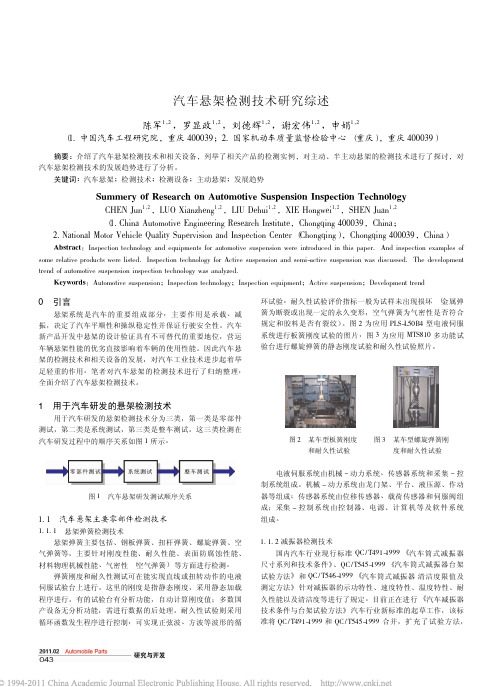
悬架系统 是 汽 车 的 重 要 组 成 部 分, 主 要 作 用 是 承 载、 减 振,决定了汽车平顺性和操纵稳定性并保证行驶安全性。汽车 新产品开发中悬架的设计验证具有不可替代的重要地位,营运 车辆悬架性能的优劣直接影响着车辆的使用性能。因此汽车悬 架的检测技术和相关设备的发展,对汽车工业技术进步起着举 足轻重的作用。笔者对汽车悬架的检测技术进行了归纳整理, 全面介绍了汽车悬架检测技术。
1. 1. 4 主动、半主动悬架零部件检测技术探讨 1. 1. 4. 1 传感器检测技术
主动或半主动悬架中有加速度传感器、力传感器、车身高 度传感器,这些传感器应满足精度、响应性、耐久性、结构紧 凑性、适应性、输出电平、再现性等指标要求; 汽车工作环境 温度是 - 40 ~ 80 ℃ ,在各种气候和道路条件下运行,因此要求 传感器能适应温度、湿度、冲击、振动、腐蚀及油液污染等恶 劣环境。因此对传感器的检测以环境试验为主,相关设备有高 低温及湿 热 试 验 箱、 热 冲 击 试 验 箱、 沙 尘 试 验 箱、 淋 雨 试 验 箱、电磁振动试验台、盐雾腐蚀试验箱等,冲击性能检测则采 用跌落试验; 通常在进行环境试验的同时或之前之后要进行传 感器本身的精度指标、响应时间以及输出电平测试,以评价传 感器是否满足相关标准要求。
电液伺服系统由机械 - 动力系统、传感器系统和采集 - 控 制系统组成。机械 - 动力系统由龙门架、平台、液压源、作动 器等组成; 传感器系统由位移传感器、载荷传感器和伺服阀组 成; 采集 - 控制系统由控制器、电源、计算机等及软件系统 组成。
中英文文献翻译-多功能汽车底盘测功机

附录AA. multi-purpose vehicle chassis dynamometerWith the rapid development of the automotive industry, traffic accidents and environmental pollution on the growing threat to human life, thus increasing the importance of vehicle detection technology stand out a variety of testing equipment have emerged. As a large-scale laboratory equipment, automobile chassis dynamometer can simulate vehicle road test a variety of conditions, the completion of the car's economy test, power test, evaluation and analysis of emissions performance, reliability test and drive the car on the special test . It is in the automotive testing research, product development and quality testing new cars and the car is essential. Use complete chassis dynamometer test and the type of vehicle quality inspection and road test compared with the usual test speed, high precision, low cost, data stability, comparability and good.In view of chassis dynamometers these advantages, many domestic manufacturers have developed a series of dynamometer products, these products are mainly used to detect the following auto axle load 10 t chassis power output, the maximum absorption power of 150 kW. Test items mainly: chassis power output, the driving force, speed, acceleration, glide performance and the accuracy of the speedometer and odometer, and so on.But domestic dynamometer products there are many imperfections, must be resolved. For example: car in different conditions, different load and other conditions, the dynamic performance can not be achieved continuous measurement and control system, control method is relatively backward. This article is for these deficiencies, the control system, control method has been improved to achieve the different conditions and different load conditions, the car's dynamic performance for accurate and reliable continuous measurement and continuous measurement of emissions to increase functionality. In addition, the light of foreign advanced technology and experience, the use of computer technology for vehicle-related transmission loss, rolling resistance, altitude, temperature and other parameters of simulation and correction.Multi-purpose vehicle chassis dynamometer (hereinafter referred to as dynamometer) is a new chassis dynamometer. Aircraft measurement and control system is the key toachieve its power equipment.Dynamometer testing computer control system to control the use of high performance industrial control computer, the entire control system including computer, monitor, keyboard, mouse, printers, input and output terminal blocks, multi-PC bus interface card, SCR and its control circuit, all components have been installed in the 1.8 m high of the standard 19-inch industrial control cabinet. Dynamometer control system coupled with the mechanical part of the (bench) constitute the entire dynamometer. Bench control system by the pressure sensor, speed sensor, pneumatic lift, and eddy current machines and other equipment to complete the dynamometer measurement and control.PC bus interface board is a multi-computer interfaces and measurement equipment, control channel, on-site analog signal amplification and analog-digital conversion, digital signal measurement done by it, the interface card can also control multiple actuator movements, other The card also provides a counter for frequency measurement of the interface.Wheel drive car in the bench rotating drum, drum rotation by the optical pulse output of the decoder, access multi-function card counter, measuring speed and distance traveled. Car driving in the bench, the driving force can drum machine by the eddy current coupling the pressure sensor, the input channel signal sent to the computer, combined with the speed signal measurable car's dynamic performance. In the actual measurement process, the measured speed signal and set the speed comparison, according to a certain algorithm to adjust bias resistance (eddy current excitation current), so that speed can be stabilized at a given value, complete constant speed under the conditions of the various data measurements.Dynamometer applications from the measurement control program, the login program and database service program structure, program design using advanced C / S (Client / Server) design. Measurement control program and the login program is a client application, they exchange data with the database is a database service procedures are completed, the database structure is transparent to users, to facilitate the system and other motor vehicle testing equipment or manage network connections. User login process is complete the basic information on the vehicle, the initial set of test items; measurement control program is the core of the system program, its main function is to complete the measurement and control hardware signals, according to testing requirements set by the login program to completethe detection task, the program also provides another parameter setting, test results query, print and other auxiliary functions.Eddy current machines, also known as eddy current dynamometer, is based on the eddy current (also known physics Foucault current) work equipment. It consists of two parts, the stator and rotor. The stator frame and the stator part including the exciting coil mounted on top. The stator frame around the hole, the excitation coils installed in the hole. The framework of the central part of the stator hub, with two bearing supports the rotor shaft. Including the rotor shaft and the rotor part fixed on the axis of the two rotors, two rotors are located at both ends of the stator part of the rotor shaft can be driven by external forces and free rotation. The inside of the rotor and the stator end face to maintain a small gap, the gap is called electromagnetic air gap. The inner side of the rotor is a very smooth surface, eddy current is generated in the smooth plane.Eddy current machine field winding access current, flux through the stator, eddy current ring, the air gap, rotor constitute a closed magnetic circuit. When the car wheel and drive roller rotates the rotor eddy current machines, due to changes in magnetic flux density of the surface of the rotor eddy current, the eddy current and magnetic field interact to produce the reverse braking torque, the stator swing around the spindle axis. Pass through the leverage of the brake torque to the pressure sensor, pressure sensor gives the corresponding electrical signals, processed by the calculation, the instantaneous power can be drawn vehicle parameters. Adjust the excitation current size, you can change the eddy current machine braking torque, with a corresponding change in vehicle speed, changing the excitation current and speed the formation of a closed loop, constant speed or constant force and, ultimately, the power measurement.Eddy current machine has a maximum speed and load range. In addition, its small size, low cost, more suitable for control automation. AC motors (induction motors) with a minimum speed (800 ~ 1500r/min) and load range, less stable, with a little hard to load features. DC Braking device with high performance, easy operation, stable working conditions, the transition easy and smooth, but its test-bed high cost, low-speed braking torque is small, thus limiting the application.This system was chosen as the eddy current unit load device, because of its external features and cost, reliability, accuracy decision.Currently, the majority of domestic water vortex machine dynamometer, eddy currentmachine has a small amount of several major water-cooled, easy-to leakage, resulting in corrosion of the bearing parts, easy to magnetic flux leakage, constant speed control accuracy, and the volume weight, need a water cooling system and lubrication system inside the vortex, very easy to use, in northern China, especially in winter does not apply. More importantly, domestic water eddy current machine for almost all the engine power measurement of high-speed power absorption unit (maximum power absorption range of 1500 ~ 4000 r / min), does not apply to vehicle chassis dynamometer, which is the maximum power absorption range of 500 ~ 1000 r / min. The international production of this special low speed, high torque eddy current machine only company in Spain and France TELMA FRENELSA company, their product mix to air-cooled.As the dynamometer torque and power measurement of the speed and load requirements to a large extent, considering cost, reliability, accuracy in the case we have chosen FRENELSA's F16-160-type air-cooled eddy current machine group 16, the absorption maximum torque speed of 750 r / min, vortex machine voltage is DC96V, current is 35A, the maximum absorption torque of 160 kg. The vortex machine constant high precision, volume weight, simple structure, easy to operate, do not need cooling water, and built-in thermocouple 160 ℃, can overheat when the automatic power-off, to avoid eddy current machine was burned.Eddy current machine is a constant speed control accuracy of the dynamometer test one of the key factors, most of the domestic dynamometer does not really solve the problem. According to standard, constant accuracy should reach ± 2 km / h (such as China GB86-94), but because of large mechanical movement of the system inertia, and inertia of different models is different from the same time, there are dead out of control, non-linear, lag reaction speed feedback in the difficulty of making the design of constant speed control has become one of the key.Currently, we are to be addressed in several ways, one direct drive as far as possible, reducing the dead zone and hysteresis control response, and digital speed control and adaptive control to solve the different moment of inertia effects. In addition, two large closed-loop speed and current use of different sampling frequency in order to effectively control the vortex dynamics and the feedback current machine. Test proved to be stable to ± 0.5 km / h, is a standard 1 / 4.Control process is as follows: the car began to accelerate, due to the speed differencebetween running speed and a larger set, using the experience of the control algorithm that is according to certain rules and gradually increase the resistance; Once the vehicle speed close to the set speed, adaptive control work. Because in the start-up phase, the running speed as soon as possible close to the set speed is the primary goal, and the last way in which speed is not stable in the set under consideration, the experience of control is simple and works well in control. The speed close to the set speed, the speed and stability the only objective, experience, control can not do anything at this time. The actual vehicle operating conditions is very complex, and the speed variation is difficult to predict, and thus the control of any form pre-set parameters are not always achieve the best control action, the effect of operating conditions and with the pros and cons of changing. Adaptive control is to adapt to similar conditions and developed, it can under the conditions and adjust the control parameters in order to achieve real-time optimal control.Car in idle state, the different load conditions, different speeds and different road conditions in the case of the emissions are different, the measured data for vehicle maintenance is important, but more important is to determine whether emissions from vehicles qualified to provide a basis for the environmental protection departments to provide accurate detection and rich data material. The dynamometer with the exhaust gas analyzer can be in different working conditions under the conditions of vehicle emissions testing, testing standards fully in line with the introduction of a new national standard (GB14761-1999).The following chassis dynamometer at constant speed, for example, analysis of measurement results.Experimental conditions: the initial speed of 60 km / h, the termination rate of 80 km / h, speed step of 5 km, constant and stable point 5. Test vehicle for the Santana sedan.In constant speed mode with exhaust gas analyzer, we carried out the engine output power, wheel torque and power output, transmission loss of power, CO, CO2, HC, O2, eight parameters were measured, and the speed, power, torque for real-time monitoring.In this experiment, the wheel and experience the power output values match, the engine output power wheel power output of power and transmission losses and. Maximum power output of the corresponding wheel speed of 75 km / h. Transmission loss of power to test the vehicle drive power is an important parameter passing, it is directly related to the car's dynamic performance.Multi-function chassis dynamometer is a motor transport and maintenance industry, comprehensive performance inspection stations, environmental protection, transportation (cars scrapped in the future will be according to their dynamic performance and emissions performance may be) and other necessary test equipment industry, with broad market prospects. By computer-controlled eddy current dynamometer load to achieve resistance simulation, different conditions can be measured vehicle dynamic performance and environmental performance (emissions performance), and has correction, the actual measurement data closer to the car when driving data. The dynamometer speed control through the adaptive control algorithm to improve the car's constant stability and achieve a dynamic performance and environmental performance of continuous measurement.附录B多功能汽车底盘测功机随着汽车工业的迅猛发展,交通事故及环境污染对人类生命的威胁越来越大,因而汽车检测技术的重要性日益突出出来,各种检测设备也应运而生。
实验四 汽车悬架性能检测与诊断

实验四汽车悬架性能检测与诊断一、实验目的及要求1.实验目的(1)检测汽车悬架装置性能;(2)掌握汽车悬架装置测仪器结构与原理;(3)掌握汽车悬架装置性能检测与诊断方法。
2.实验要求实验要求:遵循操作规程,记录实验数据、分析实验结果、撰写实验报告。
二、实验预习及准备汽车悬架装置是汽车的一个重要总成,它是将车身和车轴弹性联接的部件。
汽车悬架装置通常由弹性元件、导向装置和减振器三部分组成,其功用是传力、缓和并迅速衰减车身与车桥之间因路面不平引起的冲击和振动,保证汽车具有良好的行驶平稳性、操纵稳定性、乘坐舒适性和行驶安全性。
汽车悬架装置直接影响汽车的行驶平顺性,同时对汽车的行驶安全性、操纵稳定性、通过性以及燃料经济性等方面性能也有很大影响。
因此,汽车悬架装置的各部件品质和匹配后的性能对汽车行驶性能都有着重要的影响。
GB18565-2001《营运车辆综合性能要求和检测方法》要求:对于最大设计车速大于或等于100km/h、轴载质量小于或等于1500kg的载客汽车,应用悬架装置检测台或平板制动试验台按规定的方法进行悬架装置特性检测。
(一)实验原理对于汽车各车轮悬架系统而言,由确定的质量、弹簧和减振器组成的振动系统,在外部激振力或车辆自身制动力作用下,其振动衰减具有一定的规律性。
若悬架系统中弹簧和减振器性能不良,必然会引起振动过程的改变,因此通过检测车辆在外部激振力或自身制动力作用下对测试台面垂直作用力的变化过程,进行分析、对比就可确定汽车悬架系统中悬架弹簧和减振器的技术状况。
(二)实验仪器及设备目前,检测实践中常用的检测汽车悬架装置工作性能的试验台有谐振式悬架检测台谐振式悬架装置检测台,一般由机械和微机控制两部分组成。
(1)机械部分谐振式悬架装置检测台的机械部分由箱体和左右两套相同的振动系统构成,结构简图如图6-1所示。
图中所示为检测台单轮支承结构。
一套振动系统因其左右对称,故另一侧省略。
每套振动系统由上摆臂、中摆臂、下摆臂、支承台面、激振弹簧、驱动电机、蓄能飞轮和传感器等构成。
汽车悬架中英文对照外文翻译文献

汽车悬架中英文对照外文翻译文献中英文对照翻译汽车悬架现代汽车中的悬架有两种,一种是从动悬架,另一种是主动悬架。
从动悬架,即传统的悬架,由弹簧、减振器(减振器)、导向机构等组成,其作用是减小从道路传递到车身的冲击力以及冲击力引起的轴承系统振动。
弹簧主要用于减缓冲击力,减震器主要用于衰减振动。
因为这种悬架是由外力驱动的,所以被称为从动悬架。
而主动悬架的控制环节中安装了能够产生抽动的装置,采用一种以力抑力的方式来抑制路面对车身的冲击力和车身的倾斜力。
由于这种悬架可以自行产生力,因此被称为主动悬架。
主动悬架是近十几年发展起来的,由电脑控制的一种新型悬架,具备三个条件:(1)具有能够产生力的电源;(2)执行元件能够传递这种作用力并能连续工作;(3)具有多种传感器并将有关数据集中到微电脑进行运算并决定控制方式。
因此,主动悬架汇集了力学和电子学的技术知识,是一种比较复杂的高技术装置。
例如,配备主动悬架的法国雪铁龙桑蒂亚(Citroen santia)在悬架系统的中心有一台微型计算机,共有五种悬架传感器,分别向微电脑传送车速、前轮制动压力、踏动油门踏板的速度、车身垂直方向的振幅及频率、转向盘角度及转向速度等数据。
电脑不断接收这些数据并与预先设定的临界值进行比较,选择相应的悬架状态。
同时,微电脑独立控制每一只车轮上的执行元件,通过控制减振器内油压的变化产生抽动,从而能在任何时候、任何车轮上产生符合要求的悬架运动。
因此,桑蒂雅桥车备有多种驾驶模式选择,驾车者只要扳动位于副仪表板上的“正常”或“运动”按钮,轿车就会自动设置在最佳的悬架状态,以求最好的舒适性能。
此外,主动悬架还具有控制车身运动的功能。
当车辆在制动或转向时的惯性导致弹簧变形时,主动悬架将产生一个相对于惯性力的力,以减少车身位置的变化。
例如,当车辆转弯时,悬架传感器将立即检测车身的倾斜和横向加速度。
计算机将根据传感器的信息与预设的临界值进行比较和计算,并立即确定向悬架添加负载的位置,以将车身倾斜降至最低。
【计算机专业文献翻译】性能测试方法
届毕业设计(论文)英文参考文献英文文献1:Database Security文献出处,年,Vol.卷(期) Network Security Volume: 2003, Issue: 6, June, 2003, pp. 11-12作者: Paul Morrison英文文献2:APPROACHES TO PERFORMANCE TESTING文献出处,年,Vol.卷(期)Approaches to Performance Testing Vol.18, No.3, pp.312-319,2000作者: Matt Maccaux学生院系专业名称学生班级学生学号学生姓名学生层次APPROACHES TO PERFORMANCE TESTINGby Matt Maccaux09/12/2005AbstractThere are many different ways to go about performance testing enterprise applications, some of them more difficult than others. The type of performance testing you will do depends on what type of results you want to achieve. For example, for repeatability, benchmark testing is the best methodology. However, to test the upper limits of the system from the perspective of concurrent user load, capacity planning tests should be used. This article discusses the differences and examines various ways to go about setting up and running these performance tests.IntroductionPerformance testing a J2EE application can be a daunting and seemingly confusing task if you don't approach it with the proper plan in place. As with any software development process, you must gather requirements, understand the business needs, and lay out a formal schedule well in advance of the actual testing. The requirements for the performance testing should be driven by the needs of the business and should be explained with a set of use cases. These can be based on historical data (say, what the load pattern was on the server for a week) or on approximations based on anticipated usage. Once you have an understanding of what you need to test, you need to look at how you want to test your application.Early on in the development cycle, benchmark tests should be used to determine if any performance regressions are in the application. Benchmark tests are great for gathering repeatable results in a relatively short period of time. The best way to benchmark is to change one and only one parameter between tests. For example, if you want to see if increasing the JVM memory has any impact on the performance of your application, increment the JVM memory in stages (for example, going from 1024 MB to 1224 MB, then to 1524 MB, and finally to 2024 MB) and stop at each stage to gather the results and environment data, record this information, and then move on to the next test. This way you'll have a clear trail to follow when you are analyzing the results of the tests. In the next section, I discuss what a benchmark test looks like and the best parameters for running these tests.Later on in the development cycle, after the bugs have been worked out of the application and it has reached a stable point, you can run more complex types of tests to determine how the system will perform under different load patterns. These types of tests are called capacity planning, soak tests, and peak-rest tests, and are designed to test "real-world"-type scenarios by testing the reliability, robustness, and scalability of the application. The descriptions I use below should be taken in the abstract sense because every application's usage pattern will be different. For example, capacity-planning tests are generally used with slow ramp-ups (defined below), but if your application sees quick bursts of trafficduring a period of the day, then certainly modify your test to reflect this. Keep in mind, though, that as you change variables in the test (such as the period of ramp-up that I talk about here or the "think-time" of the users) the outcome of the test will vary. It is always a good idea to run a series of baseline tests first to establish a known, controlled environment to compare your changes with later.BenchmarkingThe key to benchmark testing is to have consistently reproducible results. Results that are reproducible allow you to do two things: reduce the number of times you have to rerun those tests; and gain confidence in the product you are testing and the numbers you produce. The performance-testing tool you use can have a great impact on your test results. Assuming two of the metrics you are benchmarking are the response time of the server and the throughput of the server, these are affected by how much load is put onto the server. The amount of load that is put onto the server can come from two different areas: the number of connections (or virtual users) that are hitting the server simultaneously; and the amount of think-time each virtual user has between requests to the server. Obviously, the more users hitting the server, the more load will be generated. Also, the shorter the think-time between requests from each user, the greater the load will be on the server. Combine those two attributes in various ways to come up with different levels of server load. Keep in mind that as you put more load on the server, the throughput will climb, to a point.Figure 1. The throughput of the system in pages per second as load increases over timeNote that the throughput increases at a constant rate and then at some point levels off.At some point, the execute queue starts growing because all the threads on the server will be in use. The incoming requests, instead of being processed immediately, will be put into a queue and processed when threads become available.Figure 2. The execute queue length of the system as load increases over timeNote that the queue length is zero for a period of time, but then starts to grow at a constant rate. This is because there is a steady increase in load on the system, and although initially the system had enough free threads to cope with the additional load, eventually it became overwhelmed and had to start queuing them up.When the system reaches the point of saturation, the throughput of the server plateaus, and you have reached the maximum for the system given those conditions. However, as server load continues to grow, the response time of the system also grows even as the throughput plateaus.Figure 3. The response times of two transactions on the system as load increases over timeNote that at the same time as the execute queue (above) starts to grow, the response time also starts to grow at an increased rate. This is because the requests cannot be served immediately.To have truly reproducible results, the system should be put under a high load with no variability. To accomplish this, the virtual users hitting the server should have 0 seconds of think-time between requests. This is because the server is immediately put under load and will start building an execute queue. If the number of requests (and virtual users) is kept consistent, the results of the benchmarking should be highly accurate and very reproducible.One question you should raise is, "How do you measure the results?" An average should be taken of the response time and throughput for a given test. The only way to accurately get these numbers though is to load all the users at once, and then run them for a predetermined amount of time. This is called a "flat" run.Figure 4. This is what a flat run looks like. All the users are loaded simultaneously.The opposite is known as a "ramp-up" run.Figure 5. This is what a ramp-up run looks like. The users are added at a constant rate (x number per second) throughout the duration of the test.The users in a ramp-up run are staggered (adding a few new users every x seconds). The ramp-up run does not allow for accurate and reproducible averages because the load on the system is constantly changing as the users are being added a few at a time. Therefore, the flat run is ideal for getting benchmark numbers.This is not to discount the value in running ramp-up-style tests. In fact, ramp-up tests are valuable for finding the ballpark in which you think you later want to run flat runs. The beauty of a ramp-up test is that you can see how the measurements change as the load on the system changes. Then you can pick the range you later want to run with flat tests.The problem with flat runs is that the system will experience "wave" effects.Figure 6. The throughput of the system in pages per second as measured during a flat runNote the appearance of waves over time. The throughput is not smooth but rather resembles a wave pattern.This is visible from all aspects of the system including the CPU utilization.Figure 7. The CPU utilization of the system over time, as measured during a flat runNote the appearance of waves over a period of time. The CPU utilization is not smooth but rather has very sharp peaks that resemble the throughput graph's waves.Additionally, the execute queue experiences this unstable load, and therefore you see the queue growing and shrinking as the load on the system increases and decreases over time.Figure 8. The execute queue of the system over time as measured during a flat runNote the appearance of waves over time. The execute queue exactly mimics the CPU utilization graph above.Finally, the response time of the transactions on the system will also resemble this wave pattern.Figure 9. The response time of a transaction on the system over time as measured during a flat runNote the appearance of waves over time. The transaction response time lines up with the above graphs, but the effect is diminished over time.This occurs when all the users are doing approximately the same thing at the same time during the test. This will produce very unreliable and inaccurate results, so something must be done to counteract this. There are two ways to gain accurate measurements from these types of results. If the test is allowed to run for a very long duration (sometimes several hours, depending on how long one user iteration takes) eventually a natural sort of randomness will set in and the throughput of the server will "flatten out." Alternatively, measurements can be taken only between two of the breaks in the waves. The drawback of this method is that the duration you are capturing data from is going to be short.Capacity PlanningFor capacity-planning-type tests, your goal is to show how far a given application can scale under a specific set of circumstances. Reproducibility is not as important here as in benchmark testing because there will often be a randomness factor in the testing. This is introduced to try to simulate a more customer-like or real-world application with a real user load. Often the specific goal is to find out how many concurrent users the system can support below a certain server response time. As an example, the question you may ask is, "How many servers do I need to support 8,000 concurrent users with aresponse time of 5 seconds or less?" To answer this question, you'll need more information about the system.To attempt to determine the capacity of the system, several factors must be taken into consideration. Often the total number of users on the system is thrown around (in the hundreds of thousands), but in reality, this number doesn't mean a whole lot. What you really need to know is how many of those users will be hitting the server concurrently. The next thing you need to know is what the think-time or time between requests for each user will be. This is critical because the lower the think-time, the fewer concurrent users the system will be able to support. For example, a system that has users with a1-second think-time will probably be able to support only a few hundred concurrently. However, a system with a think-time of 30 seconds will be able to support tens of thousands (given that the hardware and application are the same). In the real world, it is often difficult to determine exactly what the think-time of the users is. It is also important to note that in the real world users won't be clicking at exactly that interval every time they send a request.This is where randomization comes into play. If you know your average user has a think-time of 5 seconds give or take 20 percent, then when you design your load test, ensure that there is 5 seconds +/- 20 percent between every click. Additionally, the notion of "pacing" can be used to introduce more randomness into your load scenario. It works like this: After a virtual user has completed one full set of requests, that user pauses for either a set period of time or a small, randomized period of time (say, 2 seconds +/- 25 percent), and then continues on with the next full set of requests. Combining these two methods of randomization into the test run should provide more of a real-world-like scenario.Now comes the part where you actually run your capacity planning test. The next question is, "How do I load the users to simulate the load?" The best way to do this is to try to emulate how users hit the server during peak hours. Does that user load happen gradually over a period of time? If so, a ramp-up-style load should be used, where x number of users are added ever y seconds. Or, do all the users hit the system in a very short period of time all at once? If that is the case, a flat run should be used, where all the users are simultaneously loaded onto the server. These different styles will produce different results that are not comparable. For instance, if a ramp-up run is done and you find out that the system can support 5,000 users with a response time of 4 seconds or less, and then you follow that test with a flat run with 5,000 users, you'll probably find that the average response time of the system with 5,000 users is higher than 4 seconds. This is an inherent inaccuracy in ramp-up runs that prevents them from pinpointing the exact number of concurrent users a system can support. For a portal application, for example, this inaccuracy is amplified as the size of the portal grows and as the size of the cluster is increased.This is not to say that ramp-up tests should not be used. Ramp-up runs are great if the load on the system is slowly increased over a long period of time. This is because the system will be able to continually adjust over time. If a fast ramp-up is used, the system will lag and artificially report a lower response time than what would be seen if a similar number of users were being loaded during a flat run.So, what is the best way to determine capacity? Taking the best of both load types and running a series of tests will yield the best results. For example, using a ramp-up run to determine the range of users that the system can support should be used first. Then, once that range has been determined, doing a series of flat runs at various concurrent user loads within that range can be used to more accurately determine the capacity of the system.Soak TestsA soak test is a straightforward type of performance test. Soak tests are long-duration tests with a static number of concurrent users that test the overall robustness of the system. These tests will show any performance degradations over time via memory leaks, increased garbage collection (GC), or other problems in the system. The longer the test, the more confidence in the system you will have. It is a good idea to run this test twice—once with a fairly moderate user load (but below capacity so that there is no execute queue) and once with a high user load (so that there is a positive execute queue).These tests should be run for several days to really get a good idea of the long-term health of the application. Make sure that the application being tested is as close to real world as possible with a realistic user scenario (how the virtual users navigate through the application) testing all the features of the application. Ensure that all the necessary monitoring tools are running so problems will be accurately detected and tracked down later.Peak-Rest TestsPeak-rest tests are a hybrid of the capacity-planning ramp-up-style tests and soak tests. The goal here is to determine how well the system recovers from a high load (such as one during peak hours of the system), goes back to near idle, and then goes back up to peak load and back down again.The best way to implement this test is to do a series of quick ramp-up tests followed by a plateau (determined by the business requirements), and then a dropping off of the load. A pause in the system should then be used, followed by another quick ramp-up; then you repeat the process. A couple things can be determined from this: Does the system recover on the second "peak" and each subsequent peak to the same level (or greater) than the first peak? And does the system show any signs of memory or GC degradation over the course of the test? The longer this test is run (repeating the peak/idle cycle over and over), the better idea you'll have of what the long-term health of the system looks like.ConclusionThis article has described several approaches to performance testing. Depending on the business requirements, development cycle, and lifecycle of the application, some tests will be better suited than others for a given organization. In all cases though, you should ask some fundamental questions before going down one path or another. The answers to these questions will then determine how to best test the application.These questions are:∙How repeatable do the results need to be?∙How many times do you want to run and rerun these tests?∙What stage of the development cycle are you in?∙What are your business requirements?∙What are your user requirements?∙How long do you expect the live production system to stay up between maintenance downtimes?∙What is the expected user load during an average business day?By answering these questions and then seeing how the answers fit into the above performance test types, you should be able to come up with a solid plan for testing the overall performance of your application. Additional Reading∙WebLogic Server Performance and Tuning - WebLogic Server product documentation∙WebLogic Server performance tools and information - WebLogic Server product documentation ∙The Grinder: Load Testing for Everyone by Philip Aston (dev2dev, November 2002)∙Performance Tuning Guide - WebLogic Portal product documentation∙dev2dev WebLogic Server Product Center性能测试方法对于企业应用程序,有许多进行性能测试的方法,其中一些方法实行起来要比其他方法困难。
悬架文献翻译

Suspensions8.1 IntroductionThe suspension system comprises the interface between the vehicle body frame and the road surface. (This statement assumes that the wheels and tires comprise part of the suspension system, which they indeed do.) Most people consider that the sole function of the suspension is to provide a comfortable ride. Although this is true, the system can be said to have three primary functions: 1.Isolate passengers and cargo from vibration and shock. It is desirable to make the Passengers as comfortable as possible; thus, the suspension system must be able to absorb shocks and dampen vibration caused by irregularities in the road surface.2.Improve mobility. The suspension provides clearance between the road and the bottomof the vehicle. It also provides lateral and longitudinal stability and resists chassis roll.3. Provide for vehicle control.The suspension reacts to tire forces including acceleration, braking, and steering and forces. Furthermore, the suspension system is tasked to maintain the proper steer and camber angles relative to the road surface, as well as to keep all four tires in contact with the road while maneuvering.The analysis of vehicle suspensions and their dynamic response is an extremely complicated task. Because this is an introductory text, many simplifying assumptions will be made in the analysis of suspension systems. Although the models introduced are simple, they nevertheless illustrate several important characteristics and design requirements for suspensions.This chapter will begin with simplified vibration analysis in both one and two degrees of freedom. Next, the primary components of the suspension will be discussed, with representative examples of current suspension systems. The chapter concludes with a discussion of the effect of suspension design on the dynamics of the vehicle.8.2 Perception of RidePassenger opinion regarding what constitutes good ride quality obviously is extremely subjective. What one person considers the optimum ride may be completely unacceptable to another. The person who prefers sports cars will be appalled by the handling of a large luxury vehicle, whereas the owner of the luxury vehicle will be quite dissatisfied with the ride of a sports car.Other factors come into play when people evaluate the ride quality of a vehicle. Certainly, the acoustic quality is a factor, and although not a direct result of the suspension,people object to noises, rattles, and squeaks in their vehicles. The "feel" of the seats is another important consideration and has an impact on the level of force or vibration transmitted to the occupant's body. The climate control system, while not at all influenced by the suspension design, influences perception of ride, too. If a person is uncomfortable because of the interior temperature, his or her subjective evaluation of ride quality will be affected. Thus, one of the challenges facing thesuspension engineer is to take highly subjective evaluations and convert them into numerical standards.However, the rate of change of acceleration, or the jerk, can produce discomfort. A parachutist feels discomfort at the moment of opening his or her parachute due to the shock, although it is usually mitigated by a profound sense of relief as the parachute inflates. But the jerk is not the only element that produces discomfort. The frequency of acceleration and its direction influence comfort. A car that pitches drastically when encountering a bump is seen as less comfortable than one that bounces in a more flat attitude, even if both motions continue for similar amounts of time.A substantial body of literature is devoted to quantifying ride quality and human perception of ride. Studies and data have been collected by bodies such as the Society of Automotive Engineers (SAE) and the International Standards Organization (ISO), as well as by individual researchers. Gillespie (1994) provides a succinct overview of the literature. Although the sources are numerous, Gillespie concludes that there are no accepted standards for judging ride quality due to variables such as seat position, single versus multiple frequency inputs, multi-direction input, duration of exposure, and audible or ocular inputs.The bottom line is that all of the research and comfort curves are a starting point for the suspension engineer. There is no substitute for the subjective evaluation provided by a road test. We could conclude that the suspension engineer should eliminate all vibration from the car, but this tends to be an infinite problem. As surely as one vibration is removed, the occupants become aware of another, more subtle vibration. As a result, suspension engineers appear to have solid job security for the foreseeable future.8.3 Basic Vibrational Analysis8.3.1 Single-Degree-of-Freedom Model (Quarter Car Model)A vehicle consists of a multiple spring-mass-damper system that in reality has six degrees of freedom. Although the effective transverse and longitudinal stiffnesses of the suspension are much greater than the vertical stiffness, lateral and transverse compliance cannot generally be disregarded and may have a large impact on the vehicle dynamics. As a first simplifying assumption, the vehicle and suspension can be modeled in two dimensions, as shown in Fig. 8.1. The main mass consists of the vehicle itself and is comprised of all components that are supported by the springs. Hence, it is known as the sprung mass. Several components, such as axles, hubs, possibly the differential, and so forth, are not supported by the springs and are called the unsprung mass. The tires, being made of rubber, have inherent stiffness and damping and hence are modeled as a separate spring-damper system.The primary motion of the vehicle mass is in the vertical direction. However, because of the separate springs and dampers at the front and rear, rotational motion usually results. At this point, it is instructive to examine a simple one-degree-of-freedom system to outline the basics of suspension analysis. In this case, it will be assumed that the tire stiffness is infinite, and the undamped motion of one spring will be examined. Figure 8.2 shows this model.The equation of motion for the system can be obtained by applying Newton's Law and, in the case of unforced (free) vibration, is0k x x m+= ( 8.1)The general solution for this linear differential equation iscos()sin()n n x A w t B w t =+ (8.2) Where A and B are constants that depend on initial conditions, and n w is the natural frequency ofthe system and is defined asr a d /s e c )n w = (8.3) Orn f H z = (8.4) Of course, this system, once disturbed from its datum position, would continue to oscillate at its natural frequency indefinitely. Although all real springs have some internal damping, a vehicle requires a more positive source of damping. Thus, the vehicle contains dampers. (In the United States, dampers are known as shock absorbers, although the name is misleading.)Figure 8.3 shows such a model.Most automotive dampers can be modeled with sufficient accuracy by assuming they are viscous dampers. In other words, the damping force is proportional to the velocity of the displacements, ord F c x = (8.5)Figure 8.3 . Simple spring-mass-damper system.where c is the coefficient of viscous damping. In this case, the unforced (homogenous) equation of motion becomes0c k x x x m m++= (8.6) and the general solution to Eq. 8.6 is()(/2)c m t x eBe -=+ (8.7)The first term in Eq. 8.7 is an exponentially decaying function of time. The terms in parentheses are dependent on whether the term under the radical is greater than, less than, or equal to zero. If the damping term (c/2m)2 is greater than k/m, the terms in the radical are real numbers, and no oscillation is possible. If the damping term is less than k/m, the exponent becomes an imaginary number indicating oscillatory motion. The limiting case is when the damping term equals k/m. This case is known as critical damping, and the value of the critical damping coefficient is then22c n c mw == (8.8) Now, any damping condition can be expressed in relation to the critical damping. Thus, the damping ratio, ζis defined asc cc ζ= (8.9)A vehicle is normally underdamped (ζ< 1.0); thus, Eq. 8.7 can be written as)sin n t n x Xe t ζωφ-=+ (8.10)where X and φare arbitrary constants determined from the initial conditions. This equation indicates that the damped frequency of oscillation is modified in the presence of damping, and thedamped natural frequency is given byd n ω= (8.11)The response to excitation is an exponentially decreasing sine wave, as depicted in Fig. 8.4. In the case of forced vibration, the amplitude of the displacement is dependent on both the damping ratio and the excitation frequency. If harmonic forcing is assumed, Eq. 8.6 becomes0sin()mxcx kx F t ω++= (8.12)Figure 8.4. Underdamped oscillation, ζ< 1.0.where ωis the excitation frequency. The solution to Eq. 8.12 consists of a complementary function, which is the solution to the homogenous equation, and a particular solution (Thomson,1988). The particular solution reduces to a steady-state oscillation at the excitation frequency, ω. The displacement can be nondimensionalized with respect to the static displacement (Folk), so that0k X F =(8.13)Figure 8.5 shows a plot of Eq. 8.13 and illustrates the effect of damping on the nondimensional amplitude. As expected, displacements are largest when the damping is light and the system is excited near (or at) its natural frequencyFigure 8.5. Plot of Eq. 8.13.8.3.2 Two-Degrees-of-Freedom Model (Quarter Car Model)In a vehicle, the excitation of the vehicle spring-mass system is provided by the motion of the tire/ unsprung mass and can be analyzed by the same techniques used to analyze support motion. The details of such an analysis are contained in vibration texts (Thomson, 1988), and only the highlights will be discussed here. Referring to Fig. 8.1, and isolating one spring-mass-damper system, the displacement of the vehicle body will be defined by x, whereas the displacement of the unsprung mass will be designated as y, as shown in Fig. 8.6.Figure 8.6. Vehicle excited by the motionof the unsprung mass.The equation of motion for the vehicle mass is now()()Mx k x y c x y =----(8.14) Letting z = x - y, Eq. 8.14 can be written asM z c z k z m ++=- (8.15) At this point, it is most illustrative to assume that the motion of the unsprung mass is harmonic, which is not a bad assumption given that the tire and unsprung mass constitute a damped vibratory system. Before proceeding, the concept of transmissibility must be introduced. Transmissibility is defined as the ratio of the transmitted force to the ratio of the exciting force. Because in this case the exciting force is provided by the unsprung mass and tire, and as such is proportional to the displacement of the unsprung mass, the transmissibilityis given by (Thomson, 1988) 、0t F X TR F Y === (8.16) whereω= natural frequency of the unsprung mass systemn ω= natural frequency of the vehicle mass systemFigure 8.7 shows a plot of Eq. 8.16As mentioned in the introduction to this chapter, one of the functions of the suspension is to isolate passengers and cargo from vibration and shock. As shown in Fig. 8.7, as long as the frequency ratio n ωω⎛⎫ ⎪⎝⎭, any displacement of the vehicle mass will be less than that of the unsprung mass. In fact, the natural frequency of the unsprung mass system should be much greater than that of the vehicle mass/suspension system. There are, of course, two ways to do this, recalling that the natural frequency of a spring-mass system is given by Eq. 8.3. First, ensure that the stiffness of the tire is higher than that of the suspension springs. This usually is not an issue. The second way, and one of great importance to the vehicle designer, is to keep the unsprung mass as small as possible. As will be shown later, some suspension systems have a significant sprung mass, and such vehicles have a "bouncy" ride, the classic example being an unloaded dump truck.Figure 8.7. Plot of transmissibility Eq8. 168.4 Suspension System ComponentsThe primary components in the suspension system are the springs and the dampers (or shocks). Although there are only two primary components, there are several variations on the theme, and these will be discussed in the following sections.8.4.1 SpringsThe spring is the main component of the suspension system, and four types are primarily in use today: (1) leaf springs, (2) torsion bars, (3) coil springs, and (4) pneumatic (air) springs.8.4.1.1 Leaf SpringsFigure 8.8 shows a typical leaf spring. Most early cars used this type of spring because leaf springs were used extensively on horse-drawn carriages, and early designers had some experience with them. The leaf spring shown in Fig. 8.8 is a multi-leaf type. This type of spring is made of a single elliptical spring with several smaller leaves attached to it with clamps. The leaves also are fixed rigidly by the center bolt, which prevents individual leaves from moving off-center during deflection. The additional leaves make the spring stiffer, allowing it to support greater loads. Furthermore, as the spring deflects, friction is generated between the leaves, resulting in some damping capability. Leaf springs also provide fore-and-aft location, as well as some lateral location, for the axle. Although leaf springs are simple and cheap, they tend to be heavy. Leaf springs also weaken with age and are susceptible to sag8.4.1.2 Torsion BarsThe torsion bar is a circular steel rod made of spring steel. One end of the rod is anchored to the frame, and loading is pure shear due to torsion. Figure 8.18 shows an example of a torsion bar. The torsion bar has very little inherent damping and therefore must be used in conjunction with dampers. As long as the bar remains in the elastic region, torque resistance will return the bar to its normal position upon unloading. The primary disadvantage of torsion bars is the axial space required for installation.8.4.1.3 Coil SpringsCoil springs are basically torsion bars that have been wrapped into a coil. Figure 8.10 shows an example of a coil spring suspension. Similar to torsion bars, coil springs have little to no inherent damping and require the use of dampers. Coil springs are used widely in automotive applications due to their compact size. However, coil springs are not capable of providing any location of the axle; thus, they require control arms to limit longitudinal and lateral suspension motion.Before analyzing coil springs, several terms must be defined. These terms are (referenceFig. 8.11):1、Mean coil diameter, D: The center-to-center distance of the wire across the coil2、 Wire diameter, d3、Pitch, p: The distance between successive coils on an uncompressed (free) spring4、Spring index, C: C = D/d and normally is greater than 35、Spring rate, k: k = F/δ, where F is applied load and δ is deflection6、Active coils: The number of coils not touching the support7、Ends: Treatment of the last coil, which can be plain, squared, or ground, as shown in Fig. 8.12The relationship among the total number of coils, the number of active coils, the free length, the solid length, and the pitch for a given spring can be determined from Table 8.1 and depends on the end treatment.The spring analysis begins with reference to the spring loaded by a force, F, shown in Fig. 8.22. Taking a cut through one of the coils, the spring is seen to be acted upon by a direct shear and a torsional shear. The shear stress is a maximum on the inside of the coil, and the total shear stress ismax Tr F J Aτ=+ (8.17) Noting that 4,,,2232FD d d T r J and π=== 2d 4A π=and substituting these terms into Eq. 8.16givesmax 3288FD FC d d τππ== (8.18)TABLE 8.1 FORMULAS FOR SPRING DIMENSIONS(t N = TOTAL NUMBER OF COILS) (ADAPTED FROM SHIGLEY AND MISCHKE, 200)However, the actual stress is larger than that predicted by the static analysis due to the curvature of the spring. A correction factor based on the work by Wahl(1963) is applied. Thus, the shear stress in the spring ismax 3288W W FD FC K K d dτππ== (8.19) Where K w is the Wahl factor and is given by410.61544W C K C C-=+- (8.20) The spring rate is given by438ad G k D N = (8.21) Other design considerations for coil springs include buckling and surge. These considerations are well treated in machine design texts.8.4.1.4 Pneumatic (Air) SpringsPneumatic suspension systems have been used in the United States on buses, trailers, and recently on passenger cars and sport utility vehicles (SUVs). The complete system consists of an air compressor, reservoir, control system, and gas springs, such as the type shown in Fig. 8.14. Theunique factor of pneumatic systems is that the control system can modulate the spring pressure toprovide a constant static deflection; in other words, the vehicle is self-leveling. Such a feature is particularly useful in vehicles for which their gross weight varies greatly, depending on the cargo load or a trailer being towed. The pneumatic, or gas, spring is a nonlinear spring, with a deflection curve as illustrated in Fig. 8.15.Unlike a linear spring, the spring rate is not a constant and can be defined only asdWk dx (8.22)where W is the weight (or load) on the spring, and x is the deflection. Analysis of the gas spring can proceed with the following assumptions:1. The air in the spring behaves as an ideal gas.2. The spring is a closed system.3. Due to the rubber enclosure, spring operation is reversible and adiabatic.Under these assumptions, the spring is modeled as a closed, piston-cylinder device. Thus, the load (weight) on the spring is balanced by the internal pressure acting over the area, orW=PA (8.23) Because the area is assumed to be constant, it follows thatdW=AdP (8.24) For a reversible, adiabatic processPV K =C (8.25)where C is a constant and k is the ratio of specific heats (c pv c ). In reality, there will be some heattransfer from the gas. Thus, the actual polytropic exponent will lie somewhere between1.0 (which is an isothermal process) and k, which for air or nitrogen is 1.4. Keeping the adiabatic assumption,K P CV -=1d k P k C V --=- (8.26)Combining Eqs. 8.22, 8.23, and 8.25 givesk W A C V -= (8.27)1K d W A k C V d V--=- Now, for any spring-mass system, the natural frequency (in hertz) is given byn f == (8.28) Using the spring rate for the gas spring (Eq. 8.21), Eq. 8.27 becomes224n n f dx dW f g Wπ=⇒= (8.29) Substituting the expressions in Eq. 8.26 into Eq. 8.28 yields2214k n k f dx AkCV dV dV k g ACV Vπ----==- (8.30) If the spring deflects from some datum position x 0, to some final position, x 2, the volume of the gas changes from V 0, to V 2. Thus, Eq. 8.29may be integrated as2200x 224Vn x V f dx dV k g V π=-⎰⎰ (8.31) Which finally producesf=(8.32)nEquation 8.31 allows the natural frequency of the system to be calculated for a given suspension travel and gas volume. For design, it is more likely that the suspension travel is defined, and a natural frequency is selected on the basis of the desired ride characteristics for the vehicle. Then Eq. 8.31 could be used to calculate the gas volumes (or piston areas) to provide the desired ride. The advantage of the air suspension is that as the load increases, the pressure also increases. Because this rise in pressure increases the stiffness of the spring, the system maintains a constant natural frequency as load increases.8.4.2 Dampers (Shock Absorbers)Most modern dampers are of the oil-filled telescoping type. They produce damping force by the action of fluid, usually oil, being forced through an orifice or valve. The dampers may be a single tube or a double tube, and Fig. 8.16 shows examples of each. ArrayThe twin tube damper is used on most passenger cars in the United States. Although twin tube dampers are heavier and tend to operate hotter than the mono tube types, they are easier to manufacture. The twin tube shock has an outer tube around the inner tube, and the space between them forms an oil reservoir. As the piston moves up and down, a valve in the bottom of the innertube allows oil to flow into the reservoir.In the mono tube damper, the only action is that of the fluid flowing through the valve in the piston. Most mono tube dampers have a volume of compressed gas below a floating piston.The gas moves the floating piston as the fluid volume changes. The purpose of this mechanism is to prevent foaming of the working fluid. Any air in the working fluid is compressible and passes through the valve easily. This greatly reduces the damping action of the shock.Regardless of the specific design, the dampers produce force proportional to the velocity of the piston. With multiple valves, the shocks can provide different levels of damping during compression or rebound. Bastow and Howard (1 993) provide a complete chapter on damper characteristics, and they provide examples of the effect of damping ratio on vibration amplitude in the appendix. Milliken and Milliken (1995) also have excellent model results for various levels of damping.8.5 Suspension TypesClassification of suspension types can be done by position (front or rear) or type (solid axle versus independent). The solid axle front suspension has practically disappeared from the passenger car. Thus, this work will group suspensions by type, with the understanding that the solid axle types generally are found only at the rear of the vehicle.8.5.1 Solid Axle SuspensionsA solid axle has wheels mounted to each end of a rigid beam. Such systems generally are used when high load-carrying capability is required because they are very robust assemblies. They have the further advantage that as the suspension deflects; there is no camber change on the wheel due to the rigid connection. The downside to the arrangement is that the rigid connection results in a transmission of motion from one wheel to the other when the suspension deflects.8.5.1.1 Hotchkiss SuspensionsThe Hotchkiss drive was used extensively on passenger cars through the 1960s and is shown in Fig. 8.17. The system consists of a longitudinal driveshaft connected to a center differential by U-joints. The solid axle is mounted to the frame by longitudinally mounted leaf springs. Although the Hotchkiss suspension is simple, reliable, and rugged, it has been superseded by other designs for several reasons. First, as designers sought better ride qualities, the spring rates on the leaf springs dropped. This led to lateral stability difficulties because softening leaf springs requires that they be longer. Second, the longer leaf springs were susceptible to wind-up, especially as braking power and engine power began to rise. Finally, as front wheel- drive cars became more prevalent, rear-wheel-drive cars were forced to adopt independent rear suspensions to attain similar ride and handling qualities. Nevertheless, the Hotchkiss drive is still used on many four-wheel-drive trucks and SUVs at both ends of the vehicle. One disadvantage of this suspension is that the stocky axles and differential contribute to a relatively large unsprung mass.8.5.1.2 Four-Link SuspensionsThe four-link rear suspension was conceived as a means of overcoming some of the limitations of the Hotchkiss drive and is shown in Fig. 8.18. The upper arms absorb braking and drive torques, while the lower arms provide location for the axle. The main advantage of the system is the use of coil or air springs, which provide a better ride than the leaf springs used on the Hotchkiss suspension.8.5.1.3 de Dion SuspensionsThe de Dion axle, so named for its inventor, is an intermediate step between solid axles and independent suspension. The de Dion suspension has the differential mounted to the chassis, thus reducing the unsprung mass. The two wheels are connected by a hollow, sliding tube, which further reduces the unsprung mass. The disadvantage to the design is that if one wheel hits a bump, the system induces a rear-wheel steering effect. As one end of the axle is lifted, it induces a sideways motion of both tire contact points. This is resisted by the inertia of the rear end and the self aligning torque of the wheels. Although the effect is seen in independent suspensions it affects only the wheel that hits the bump. Figure 8.19shows a de Dion suspension.8.5.2 Independent SuspensionsIndependent suspensions are used almost universally on the front due to the requirement for steering. The exceptions are four-wheel-drive vehicles; even then, many use independent suspensions in front.8.5.2.1 Short-Long Arm Suspensions (SLA)The SLA suspension, also called the A-arm or double wishbone suspension, has been prevalent on U.S. cars since World War II. Due to packaging requirements, the system lends itself particularly well to front-engined, rear-wheel-drive cars. Figure 8.20 shows such a system, These systems originally had equal-length upper and lower control arms, because such an arrangement precludes camber change when the suspension deflects. However, under cornering conditions, when suspension deflection is due to body roll, such a system promotes camber changes. Thus, most modern A-arm suspensions use a shorter control arm at the top. If the system is designed carefully, the resultant camber changes can be minimized while providing good camber qualities when cornering. The double wishbone suspension may be used on the front and rear of a vehicle .8.5.2.2 MacPherson StrutsThe rise in popularity of front-wheel-drive cars has led to greater use of the MacPherson strut suspension as shown in Fig. 8.21. The system was devised by Earle S. MacPherson, a Ford suspension engineer, in the 1940s ( Bastow and Howard, 1993). The system consists of a strut (damper) connected to a lower control arm, with the upper end of the strut connected to the body or chassis. The system may have the coil spring concentric with the damper, or it may have a separate mounting location for the spring. The system also requires some means of longitudinal location, and such location may be achieved with a radius rod, wishbone-type lower control arm, or anti-roll linkages. Due to the small amount of space required for this system, it is ideal for front-wheel-drive cars that use transversely mounted engines, especially those with unibody construction. However, the system requires a large amount of vertical space for installation and thus limits the designer’s freedom to lower the hood height. MacPherson struts are used almost exclusively on the front.8.5.2.3 Trailing Arm SuspensionsTrailing arm suspensions are used on the rear of vehicles. Pure trailing arm suspensions are used on high-performance cars, such as the Corvette shown in Fig. 8.22. The pivot axis of the control arms is perpendicular to the longitudinal axis of the vehicle; thus, the arms control squat and dive, and also absorb acceleration and braking forces. The differential usually is mounted to the chassis, reducing unsprung weight.BMW and Mercedes-Benz have used semi-trailing arms, as shown in Fig. 8.23. The pivot axis is at an angle to the longitudinal axis of the vehicle. The angle varies from 18°(as in the system shownin Fig. 8.32)to as much as 25°. The semi-trailing arm system produces some camber change upon deflection, and this contributes a steering effect to the vehicle.8.5.2.4 Multi-Link SuspensionsMulti-link suspensions have ball joint connections at the ends of the control arms to eliminate bending loads. Most systems use four links, although Mercedes-Benz uses a five-link system. This over-constrains the motion but provides advantages in control of toe angles (Gillespie, 1994). Figure 8.24 shows an example of a multi-link suspension from the Jaguar XJ-40. This system evolved from Jaguar’s double link suspension system and was designed to further reduce road noise (Bastow and Howard, 1993). The system uses the half shaft as an upper control link, and the entire system is mounted in a separate sub-frame. Variations of this system also were used on the XKE and XJS, although the XJS replaced the lower wishbone with a single linkage that further required a longitudinal radius rod for axle location.。
悬架文献综述

悬架文献综述姓名:冯帅帅韩潇韩硕刘广峰谷盛丰井晓瑞学号:Tel:邮箱:@2015/9/20目录1.前言悬架是安装在车桥和车轮之间用来吸收汽车在高低不平的路面上行驶所产生的颠簸力的装置。
因此,汽车悬架系统对汽车的操作稳定性、乘坐舒适性都有很大的影响。
由于悬架系统的结构在不断改进,其性能及控制技术也得到了迅速提高。
尽管一百多年来汽车悬架从结构形式到作用原理一直在不断地演进,但从结构功能而言,它都是由弹性元件、减振装置和导向机构三部分组成。
在有些情况下,某一零部件兼起两种或三种作用,比如钢板弹簧兼起弹性元件和导向机构的作用,麦克弗逊悬架中的减振器柱兼起减振器及部分导向机构的作用,有些主动悬架中的作动器则具有弹性元件、减振器和部分导向机构的功能。
其作用是传递路面作用在车轮和车架上的支承力、牵引力、制动力和侧向反力以及这些力所产生的力矩,并且缓冲和吸收由不平路面通过车轮传给车架或车身的振动与冲击,抑制车轮的不规则振动,提高车辆平顺性(乘坐舒适性)和安全性(操纵稳定性),减少动载荷引起的零部件和货物损坏[1]。
振动是影响汽车行驶平顺性和操纵稳定性以及汽车零部件疲劳寿命的重要因素。
严重的振动还会影响汽车的行驶速度,并产生环境噪声污染。
悬架系统是提高车辆平顺性(乘座舒适性)和安全性(操纵稳定性)、减少动载荷引起零部件损坏的关键,但基于经典隔振理论的传统悬架无法同时兼顾这三方面的要求。
自70年代以来,工业发达国家开始研究基于振动主动控制的主动/半主动悬架系统。
近十年来,主动控制技术学科的发展为悬架系统从被动隔振走向振动主动控制奠定了基础。
尤其是信息科学中对模糊理论、人工神经网络、进化计算的研究,在理论上取得引人瞩目进展的同时已开始得以应用,其中包括车辆的减振和牵引。
随着汽车结构和功能的不断改进和完善,研究汽车振动,设计新型悬架系统,将振动控制到最低水平是提高现代汽车质量的重要措施。
2.汽车悬架系统的发展状况被动悬架:一般的汽车绝大多数装有由弹簧和减振器组成的机械式悬架。
悬架性能测试
检验标准
GB18565-2001《 GB18565-2001《营运车辆综合性能要求和检 验方法》 验方法》 用谐振式汽车悬架检测台检测时,受检车 的车轮在受外界激励振动下的吸收率应不 小于40%,同轴左右轮吸收率之差不得大于 小于40%,同轴左右轮吸收率之差不得大于 15%。 15%。 用制动式平板检测台进行检测时,要求受 检车辆制动时测得的悬架效率应不小于45%, 检车辆制动时测得的悬架效率应不小于45%, 同时同轴左右轮悬架效率之差不得大于20%。 同时同轴左右轮悬架效率之差不得大于20%。
板式制动检验台是一种集制动、侧滑和悬架 特性等多项检测为一体的复合检验台。 检测方法如下: 检测方法如下: ①检验员将车辆以5km/ ①检验员将车辆以5km/h~l0km/h的速度,正直 l0km/h的速度,正直 驶向平板,接近平板时置变速器空挡。 ②当各被测车轮均驶上平板后,急踩制动,使车 辆停住。 ③测量制动时的动态轮荷;记录动态轮荷的衰减 曲线 。 ④计算并显示悬架效率和同轴左右轮悬架效率之 差值。
注意事项
a 超出制动检验台额定载荷的汽车,禁止驶上制动 检验台。 b 为保证测试精度,传感器必须按照仪器使用 说明书开机预热规定的时间,通常为30 说明书开机预热规定的时间,通常为30 min 。 c 不要让肮脏的车辆直接检测,特别是轮胎和 底盘部分粘有较多泥土的情况。应首先清洗并待 滴水较少时进行检测。雨天检测必须为车辆除水, 滴水较少时才能检测。 d 严禁检验台中进水,保持传感器干燥,以保 证其灵敏度。
检测方法
a汽车轮胎规格、气压应符合规定值,车辆空载, 不乘人(含驾驶员)。 b将车辆受检轴车轮驶上悬架装置检测台,使轮胎 位于台面的中央位置。 c启动检测台,使激振器迫使汽车悬挂产生振动, 使振动频率增加过振荡的共振频率。 d电机转速稳定后切断电机电源,振动频率逐渐降 低,并将通过共振点。 e记录衰减振动曲线 ,纵坐标为动态轮荷,横坐标 为时间。测量共振时动态轮荷, 计算并显示共振时的最小动态车轮垂载荷与静态车 轮垂载荷的百分比值及其同轴左右轮百分比的差值
机械类外文翻译—可举升复合悬架性能分析与设计
可举升复合悬架性能分析与设计目录1.绪论 (1)1.1汽车悬架的功用和组成 (3)1.2汽车悬架的分类 (4)1.3汽车悬架的设计要求 (5)1.4油气悬架及其特点2.减振器结构参数的确定 (6)2.1 蓄能器内气体状态参数的确定2.2活塞尺寸确定2.3减振器伸缩范围的确定2.4活塞阀片变形与阻尼力的关系3.减振器阻尼特性与刚度特性 (14)3.1 减振器的阻尼特性3.2考虑可调阻尼孔的减振器的阻尼特性3.3 减振器的刚度特性4.减振器位移特性与速度特性4.1数学模型4.2图中符号含义4.3流量系数的确定5.可举升液压油路系统 (44)5.1可举升悬架的原理与技术特点5.2可举升悬架液压系统的基本要求与设计方案5.3液压阀5.4阀体6.外文翻译 (52)致谢 (62)参考文献 (63)附:外文翻译原文 (64)第一章绪论悬架是汽车的车架与车桥或车轮之间的一切传力连接装置的总称,其作用是传递作用在车轮和车架之间的力和力扭,并且缓冲由不平路面传给车架或车身的冲击力,并衰减由此引起的震动,以保证汽车能平顺地行驶。
1.1 汽车悬架的功用和组成悬架的主要作用有以下几个方面:1.支撑车体;2.控制车身和车轮的姿态,即控制高度、俯仰运动及侧倾运动;3.隔开车轮与车身,使路面不平对车轮的作用力得到过滤和隔阻,不直接传递给车身,保持驾驶人员的乘坐舒适性;4.保持车辆在各种平衡力作用下的稳定性;5.控制轮胎与路面之间的垂直作用力。
悬架在上述作用中实现的车辆乘坐舒适性、操作性能、最小轮胎对道路垂直作用力等性能指标要求往往是相互矛盾的,改变舒适性指标,则可能影响操纵稳定性与行驶安全性。
因此,先进的悬架就是在车辆乘坐舒适性和操纵稳定性相矛盾的方面寻找折中;在车辆乘坐舒适性、车辆安全性和生产经济性等之间寻求最合适的折中。
悬架系统是指由路面、轮胎、非悬挂质量、悬架、悬挂质量组成的一个整体。
路面是车辆行驶的道路或越野地面。
根据道路纵断面平度测量数据的表示方法和路面分级标准,国家标准GB703-86《车辆振动输入路面平度表示方法》把路面按照功率谱密度分为A B C D E F G H八级。
悬架设计及试验评价方法资料

1.1 悬架组成部分
上控制臂 螺旋弹簧 滑柱总成 减振器
下控制臂
稳定杆
双横臂式独立悬架
悬架作用演示
弹性元件:
弹性元件
使车架与车桥的连接具有弹性,吸收、缓和路面冲击和振 动。
阻尼元件:
导向杆系:
阻尼元件
衰减弹性元件的振动,吸收并散发振动能量。
约束车轮按一定的轨迹运动,承受并传递各方向的力和力 矩。
悬架系统设计及试验评价方法
Suspension & Driveline Section
主要内容
一.悬架的概述 二.悬架的分类 三.悬架的设计流程 四.R&H试验内容及方法
一、概述
悬架定义: 车架(或承载式车身)与车桥(或车轮)之间的一切传力连接装置的 总称。 悬架的作用: 把作用于车轮的垂直反力、纵向反力和侧向力以及这些反力引起力矩 传递到车架,并使车辆具有良好的乘坐舒适性、平顺性和稳定性。 悬架的组成: 汽车悬架一般都由:弹性元件、阻尼元件(减振器、导向杆系)三部 分组成。在一些车辆上还要加装横向稳定器。
主观评价
1.范围
本标准规定了汽车操纵稳定性主观评价试验方法。 本标准适用于各种类型汽车和PROTOTIPO评价标准转化而来的。
3.试验条件
3.1试验场地 试验场地应为干燥的路面,包括普通公路、高速公路、操控跑道、动 态试验广场。 3.2试验载荷 整备质量 + 1驾驶员 + 1~2乘客;满载。 3.3试验环境 风速不大于5m/s;大气温度应在0~40度范围内。
1 2 其中: n K M
簧载质量一定,悬架刚度越小,偏频越小。
悬架刚度一定,簧载质量越大,偏频越小。 K 悬架刚度; M 悬架的簧载质量; f 悬架的垂直变形。
文献翻译-汽车悬架系统
附录AThe automotive vehicle suspension system frame (or Unibody) and axle (or wheel) power transmission connection between all devices in general. Its function is to act on the road wheels on the vertical force (support force), the vertical reaction force (traction and braking) and lateral reaction force and the torque reaction force caused by the transfer to the frame (or Unibody) on, in order to ensure the normal running car. Therefore, the suspension system performance and quality performance for the vehicle plays an important role. This paper suspension systems for passenger cars and trucks in the widely used leaf spring design calculation method for the in-depth analysis and research.The article on the current variety of automotive leaf spring design calculation method of intensive analysis and research, summed up the characteristics of various calculation methods, limitations and application. Automotive leaf spring from the elastic component in addition to the role, but also and play the guiding role, and multi-chip friction between the spring damping system also played. As the leaf spring structure is simple, use and maintenance, and easy maintenance, long leaf springs are widely used in the car. Usually the new car design, according to the layout of a given space vehicle, axle load full load minus the estimated quality of non-sprung mass, obtained in each pair of spring bearing on the quality. Generally before the rear axle, wheels, brake drums and steering knuckle, transmission shaft, steering assembly, such as non-vertical rod sprung mass. If the layout of the axle above the leaf spring, spring 3 / 4 the quality of the non-sprung mass, the next set spring, 1 / 4 non-sprung mass spring mass models based on different requirements, general arrangement is given by the straight length of spring control size.In the arrangement possible, try to increase the length of the spring, mainly to consider the following reasons. As the spring stiffness and is inversely proportional to the cube of the length of the spring, so from the perspective of improving vehicle ride comfort, hope springs length longer good. In the spring stiffness of the same case, the long wheel up and down in the spring, the spring from the two ears changes the volume is relatively small, the front suspension, the caster angle change is small, in favor of auto driving stability. Increase the length of the spring can reduce stress andstress amplitude spring working to improve spring life. Can be used to increase the length of the spring reed thick spring, thereby reducing the number of springs and spring reed thick volume ear piece to improve the strength of the main vehicle sprung mass vibration system with quality components to evaluate the natural frequency of vehicle ride comfort important parameters. Suspension design based on vehicle ride comfort requirements, should be given an empty car, fully loaded, front and rear suspension frequency range. If you know the frequency, you can find the suspension static deflection. Select the suspension static deflection, the hope after the suspension static deflection is less than the front suspension static deflection, and the best value close to two vehicles in order to prevent uneven roads often hit the buffer block, suspension design must be given adequate deflection value. Suspension dynamic deflection and car usage and the value of the static deflection due to ride height, suspension travel and dynamic properties of steel spring guide are all fully loaded car with a high arc, and therefore the arc spring loaded high-value should be based on vehicle and suspension performance requirements are given the appropriate value. Some vehicles get good handling and stability, full arc high negative value.附录B汽车悬架系统是汽车车架(或承载式车身)与车桥(或车轮)之间的一切传力连接装置的总称。
悬架性能实验报告总结(3篇)

第1篇一、实验背景随着我国汽车工业的快速发展,汽车悬架系统作为汽车底盘的重要组成部分,其性能直接影响着车辆的乘坐舒适性、行驶安全性以及操控稳定性。
为了提高汽车悬架系统的性能,本研究对某型汽车悬架系统进行了性能实验,以期为悬架系统的优化设计提供理论依据。
二、实验目的1. 了解汽车悬架系统的基本原理和结构;2. 评估悬架系统的各项性能指标;3. 为悬架系统的优化设计提供理论依据。
三、实验方法1. 实验设备:汽车悬架系统、测力传感器、加速度传感器、计算机等;2. 实验步骤:(1)搭建实验平台,安装好汽车悬架系统;(2)对悬架系统进行标定,确保各传感器正常工作;(3)按照实验方案进行实验,记录实验数据;(4)对实验数据进行处理和分析。
四、实验结果与分析1. 悬架刚度实验(1)实验数据:通过对悬架系统施加不同频率的正弦载荷,记录悬架系统的振动响应,得到悬架刚度随频率的变化曲线。
(2)分析:从实验数据可以看出,悬架刚度随着频率的增加而逐渐减小,说明悬架系统具有较好的高频阻尼性能。
2. 悬架阻尼实验(1)实验数据:通过改变阻尼比,记录悬架系统的振动响应,得到悬架阻尼系数随阻尼比的变化曲线。
(2)分析:从实验数据可以看出,随着阻尼比的增大,悬架系统的阻尼系数逐渐增大,说明悬架系统具有较好的阻尼性能。
3. 悬架振动实验(1)实验数据:对悬架系统施加不同频率的正弦载荷,记录悬架系统的振动响应,得到悬架振动响应随频率的变化曲线。
(2)分析:从实验数据可以看出,悬架振动响应随着频率的增加而逐渐减小,说明悬架系统具有较好的高频振动抑制性能。
4. 悬架性能综合评价根据实验结果,对悬架系统进行综合评价,主要包括以下几个方面:(1)悬架刚度:悬架刚度应适中,以保证车辆在行驶过程中的稳定性和舒适性;(2)悬架阻尼:悬架阻尼应适中,以保证车辆在行驶过程中的平稳性和操控性;(3)悬架振动:悬架振动应较小,以保证车辆在行驶过程中的舒适性。
汽车悬架性能检测方法及其分析

汽车悬架性能检测方法及其分析
吕安涛;史大光;陆伟
【期刊名称】《山东交通科技》
【年(卷),期】2002(000)003
【摘要】对汽车悬架性能检测台的现状进行了调查研究与资料总结,论述了目前检测台的各种形式并分析各种方法的优缺点,得出共振式汽车悬架性能检测法是一种适于检测线检测的不解体快速检测的方法。
【总页数】4页(P67-70)
【作者】吕安涛;史大光;陆伟
【作者单位】山东交通学院汽车系;山东科技大学动力与控制工程学院;济南锅炉集团有限公司;山东济南 250023
【正文语种】中文
【中图分类】U463.3
【相关文献】
1.两种汽车悬架性能检测方法的对比分析 [J], 尹朋
2.汽车悬架性能检测方法及其设备 [J], 万桂芹;庄志勇
3.汽车悬架性能检测方法及设备研究 [J], 李健
4.基于Simulink的汽车悬架参数对其性能影响的仿真分析 [J], 徐颖航;覃旺桥;艾天乐
5.混联汽车悬架系统减振性能分析与优化 [J], 李凡杰;李小彭;沃旭;闻邦椿
因版权原因,仅展示原文概要,查看原文内容请购买。
汽车悬架性能评价研究
ADAMS/Insight对悬架相关参数进
行正交优化试验;按照优化结果改进实车悬架参数, 对比优化前后该车操稳性、 平顺性道路试验结果, 提出该车型悬架性能改 评价方法 仿真分析 正交优化
中图法分类号 U467.3;
文献标志码 A
悬架是汽车车架与车桥之间的连接装置, 用以 传递作用在车轮和车架之间的力和力矩, 缓冲由不 平路面传给车架或车身的冲击力。它是现代汽车重 要的部件之一, 决定车辆的操纵稳定性、 乘坐舒适性 和行驶安全性[1]。 随着汽车动力学理论及应用软件的不断发展和 完善, 通常是将悬架系统简化成一定条件下的振动 模型, 通过应用成熟的相关软件进行机械系统的动 力学仿真, 这对缩减研发周期、 节约研发成本具有极 大意义[2]。
1 7 ( 2 1 ) : 3 1 3 — 323 P e rfo rm a n c e e v a lu a tio n re
Y a o S h ic o n g , W a n L ix ia n g , W a n g B o , e t al.
km h km h km h km h h、 60 km/ h 六个车速下分另lj进行[ M ]。
第 17卷 第 21期
2017年 7 月Leabharlann 科 学 技 术 与 工 程
1671 — 1815(2017)21-0313-11
Science Technology and Engineering
©
Vol . 17 No . 21 Jul . 2017 2017 Sci . Tech . Engrg .
汽车悬架性能评价研究
能试 验 、 转向轻便性试验、 蛇形试验、 稳态 回 转 试 验 [3]。本文考虑目前汽车市场助力转向系统的普 及, 以及当前各汽车厂商的产品均具有较好的转向 轻便性能, 所以只做除转向轻便性之外的其余五个 国家标准试验。根据试验得出的各个试验数据, 结 合《 汽 车 操 纵 稳 定 性 指 标 限 值 与 评 价 方 法 》( 480—1999)对这些数据进行处理, 最后可以得到这 五个试验的百分制评价得分。6 0 分 为 及 格 , 100分
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
悬架性能测试悬架系统虽不是汽车运行不可或缺的部件,但有了它人们可以获得更佳的驾驶感受。
简单的说,它是车身与路面之见的桥梁。
悬架的行程涉及到悬浮于车轮之上的车架,传动系的相对位置。
就像横跨于旧金山海湾之上的金门大桥,它连接了海湾两侧。
去掉汽车上的悬架就像是你做一次冷水潜泳通过海湾一样,你可以平安的渡过整个秋天,但会疼痛会持续几周之久。
想想滑板吧!它直接接触路面你可以感受到每一块砖,裂隙及其撞击。
这简直就是一种令人全身都为之震颤的体验。
当轮子滑过路面时,就会在此产生震动,冲击,这种震动的旅程时对你的身体和勇气的检验。
如果你没感到随时都有被掀翻之势,那么你或许会乐在其中吧!这就是你会在没有悬架的汽车上将会体验到的。
为了道路交通安全,包括定期检查车辆暂停行驶性能测试是顺理成章的事。
原型试验结果与机载和规格提出有效悬架系统的测试。
示威活动是由欧洲减震器制造商协会(EUSAMA),正确运作减震器已经引起了许多国家重视.。
估计英国早在1977年1月起,环境部就进行了检查减震器的MOT测试。
现在减震器机车里的测试仪器,就其实质效力及安全的客观评价就没有达到共识.。
但人们认为,欧洲可能用更严厉的法律手段定期检验将来的一种客观需求测试设备无法解释的错误。
自1971年成立,EuSAMA就认识到了该问题的重要性,并组成了最初的技术小组,负责研究和分析测试仪器。
有两个基本类型的机器提供了当时减震器故障诊断。
包括:1. 吊机,在轴的车轮约100毫米处,然后让它们落下。
接着记下他们各自的位置,然后和预定的前方或后方车辆暂停位置比较。
这种模拟机向前迈了一大步,并记录了实体运动情况(参看图1).这些措施调动机轮,引发暂停,从上述共振频率为零位置扫描。
采用了支持平台下的轮胎.。
成绩记录结果与车轮时间不符。
同时,把车轮弹跳沉最高频率和前方或后方的特殊车辆预定暂停位置进行比较。
下面要介绍的第三种机器,通过应用组件的平台下轮胎,引发了暂停或不断的频率阶段措施。
时刻激励部队记录结果,并和特殊车辆预定的暂停位置比较。
这些系统有三个基本的缺点:A.与原来的阻尼表现比较而言,实际的阻尼出现了一定的退化。
原来的表现,已经是在边缘了。
B.设定上限的问题,即应该由谁来定限额的标准应该是什么呢? 目前在实践中设定的范围和可接受表现之间几乎没有任何关系C.对不同类型的车辆的悬架系统和实际存在的各种各样的中断,它们的界限会有所差别。
这就需要全面参考手册并不断更新。
尽管该系统有这些根本的弊端,但是他们的根特大学实验室工程师,以及几位Eusama成员已经开始使用测试仪器。
正如所料,第一个结论是,没有检验方法是可以不包括拆除汽车减震器就能够提供有关资料和减震器单的,但实际上整个汽车停止系统是通过了测试.。
这可以说是一个积极的方面测试,全部停止安全状况应当是良好的;尽管减震器最有可能进一步部分使用恶化,其他缺点如夸大轮胎,或处理破城球,如果可能的话,应给予诊断。
其他影响测试结果的因素中,气温减震器影响所有机器给出的结果。
对于下降型试验机减震器缺陷造成的高频激励是不能察觉的。
频率扫描型机器的出现,持续的投入意味着在用软或硬中断的车辆之间差别很大。
因此从太空正常到重型任务的改变(操作可能无法识别)可以认为直接影响结果。
每一种机器的制造都有它自己的特征,但由于基本原则,被认为是不可接受的测试不会在这里出现。
充分考虑技术小组委员会建议Eusama的加入,虽然现有机器正确操作,可以诊断许多错误减震器、负责协会不能批准这种设备作为技术上代表某一方面性能的衡量参数。
以刹车测试为例,指出:测试仪器直接显示制动效率的百分比,无需辨别车型或使用参考手册.。
同样,制动性能的最低水平也一定能为所有模式汽车使用,让顾客立即知道刹车注意事项,有些机器显示制动失衡,但并不表明它的某组成部分失常。
运用车辆停止同样的原则,应当可以提供测试,给出直接显示或最好的百分比,说明从安全角度暂停是不是可取。
进一步说,必须客观的执行,也就是说,测试者不需要任何辨别、说明、和参考手册。
因此技术小组寻找了一个合适的参数,可以视为车辆安全暂停标准。
如前所述,只有一个正常的组成部分那就是使用减震器。
首先必须确定减震器的作用。
它们可以实现两种功能:降低车身移动和控制车轮乱跳。
允许车身移动是一个很值得尝试的问题,主要是控制这些移动,在优化舒适方面,减震器的阻尼特性是不同的。
车身的移动当然影响到交通堵塞,但实际上很少有普通司机能达到范围内,所以对安全措施而言,车身的阻尼特性变得不那么重要。
在任何情况下,汽车阻尼性能差的司机可以很快控制速度,保证车辆的反应能力。
从另一方面来说,车轮弹跳是衡量危险的一个现象,车轮固定不牢固的危险是众所周知的。
两站和制动性能也是一样。
两站的轮胎和制动性能要收到道路情况的限制; 这是依靠纵向的联系,以及车轮轮胎资自身的性能。
道路交通堵塞的一个客观衡量标准,即车辆暂停安全性被独立出,但是仍需能够体现它可以随时解释。
有人提议,轮胎和公路间的纵向联系,车轮跳动次数,表示这是一个静态的车轮负荷百分比.。
这种可能性曾在会晤技术小组委员会和根特大学的Verschoore 博士讨论过,并达成了一些一致意见,但是一些成员仍表示怀疑这个测量参数实用性,以及怀疑相关结果。
在以后的小组中获悉,德国机械原型大概用上述原则提出了对根特大学的评价。
某些建议进行了修改后,根特大学和Eusama 公司成员证明了这种测试的可能性,充分证明了技术小组委员会要衡量参数的的决定。
下面是有关原型机器测试的过程和测试结果,由西德的Maschingfabrik Koppern 和 Co, Hattingen 发展,比利时布鲁塞尔的门罗提出。
车轮转动是由暂停引发的,扫描频率范围为0-25赫兹,在轮胎下方使用,伴随有固定6毫米的中风转动。
一次测试一个轮胎。
计算公式:100% 最小轮胎载重静止时在重.测试者所分析的结果会通过最小轮胎受力预示展现出来明显特征。
注重测试时的仪器读数和以往的实验经验相匹配,因为还没有一种科学的测试方法能够很精确的用在道路行驶测试系统上.最终决定车辆的行驶平顺性和乘座舒适性取决于车辆制造商所做的或多或少的行驶试验.测试方法是否能行将在于悬架系统是否正常工作,因此,推荐仔细的检查悬架系统的每一个单元以次来改进悬架测试的精确性,初始的错误可以经常被找到在测试恶化之前.第二,这悬架系统的测试,车轮与车轮之间,只有当有毛病时才表现出来;它并不规定这些错误,通过一个熟练的操作者可能从测试读本上诊断出一些毛病.很明显在设计一个机器时我们应考虑到存在一定机率过度静摩擦,仍然需要在这一领域的改进工作.当加强和改进弹簧和减振器时,汽车悬架的基本设计并没有同步进行,也没有什么重大革命性的发展。
但是这一切都随着BOSE公司的悬架品牌的引入而发生改变--就是那个在声学因发明创造引以为名的公司。
一些专家已经在说—BOSE的悬架是自汽车技术引入全独立悬架以来在汽车悬架的最重大的进步。
它是怎么工作的呢?BOSE的系统是在每一个车轮上装一个线控电磁马达(LEM)以控制一组减振器和弹性元件的状态。
功率放大器提供电力对马达在这种情况下他们的力量再生以系统的各压缩。
马达的主要好处是, 他们因具有惯性,不限制于固有的在常规基于流体的阻尼特性。
所以,一个LEM可以在任何的速度伸张和压缩,自然它可衰减乘员舱体的所有振动。
轮子的运动可以被很好的控制,因而,在轮子的任何运动状态车体都可以保持可以接受的状态。
LEM同样可以在汽车加、减速,转弯时产生的倾角较小,让驾驶员以更好的状态驾驶汽车。
Suspension performance testingThe suspension system, while not absolutely essential to the operation of a motor vehicle,makes a big difference in the amount of pleasure experienced while driving. Essentially, it acts as a "bridge" between the occupants of the vehicle and the road they ride on.The term suspension refers to the ability of this bridge to "suspend" a vehicle's frame, body and powertrain above the wheels. Like the Golden Gate Bridge hovering over San Francisco Bay, it separates the two and keeps them apart. To remove this suspension would be like taking a cool dive from the Golden Gate: you might survive the fall, but the impact would leave you sore for weeks.Think of a skateboard. It has direct contact with the road. You feel every brick, crack, crevice and bump. It's almost a visceral experience. As the wheels growl across the pavement, picking up a bump here, a crack there, the vibration travels up your legs and settles in your gut. You could almost admit you were having fun, if you didn't feel like you were gonna toss your tacos at any second. This is what your car would feel like without a suspension system.In the interests of road safety, it is logical to include in periodic roadworthiness tests an inspection of vehicle suspension performance. The results of tests with a prototype machine are presented and a specification proposed for a valid suspension test.Demonstrations organized by the European Shock Absorbers Manufacturers’Association ( EuSAMA) in many countries have drawn attention to the importance of correctly functioning shock absorbers. In the United Kingdom it is anticipate that the Department of the Environment will include a specific shock absorber check in the MOT Test with effect from January 1977.Of the machines currently available for testing shock absorbers without removing them from the vehicle, there is no real consensus of opinion concerning their validity to evaluate suspension safety objectively. But it is felt that possiblemore stringent legislation on European periodic vehicle tests in the future will demand a form of objective testing on equipment that is incapable of erroneous interpretation.Since its formation in 1971 EuSAMA has realized the imnportance of the problem, and initially charged its technical sub-committee with the task of examining and analyzing the various test machines then available. Two basic types of machine were offered at that time for diagnosing faulty shock absorbers. These were:Machines which lift up the wheels on an axle by about 100 mm and then let them drop. The subsequent displacements of the body on each side are recorded and the results compared with preset values for the particular vehicle and the suspension position, front or rear. Such a machine simulates a step input and records the subsequent body movements (see Fig 1).Machines which measure wheel movements induced by the exitation of the suspension through a frequency scan from above resonance frequency to zero, applied by means of a spring-supported platform under the tyre. Results are recorded in the form of wheel displacement against time. While passing through the wheel bounce resonant frequency the maximum amplitude is obtained and this is compared with preset values for the particular vehicle and the suspension position front or rear (see Fig 2).A third machine, introduced later, measures phase shift induced by the excitation of the suspension at a constant frequency and stroke, applied by means of a vibrating platform under the tyre. The phase shift between the moment of excitation and the force-reaction is recorded and the result is compared with preset values for the particular vehicle and suspension position (see Fig 3).These systems have three fundamental drawbacks:A: The actual damping is compared with the original damping the limit being a certain degradation in comparison with the original performance. The original performance, however, can already be marginal.B: The problems of limit setting, namely by whom should the limits be set and what are the criteria they should about? At present there is hardly anyrelation between set limits and acceptable performance in practice.C: The practical problem of various limits for different vehicle types and their suspensions. This requires comprehensive reference manuals that need continuously updating.Despite these fundamental drawbacks, examples of the ? widely used test machines were put through their paces by the Automotive Engineers Laboratory of the University of Ghent, as well as by several EuSAMA members. As expected, the first conclusion is that no test method which does not include dismantling the shock absorbers from the vehicle is able to furnish information concerning the shock absorber alone, and it is in fact the whole of the vehicle suspension system that is tested. This can be considered as a positive aspect of testing, since the whole of the suspension should be in good condition for safety; although the shock absorber is the component most likely to deteriorate with use, other defects such as incorrectly inflated tyres, broken springs or seized ball-joins should if possible be diagnosed.Of the other factors which influenced test results it was found that all machines gave results that were much affected by shock absorber temperature. In the case of the drop type testing machines, defects in shock absorbers caused by high frequency excitation could not be detected. With the frequency scan type of machine, approximately constant force input implies a big difference in results between vehicles with soft or hard suspension, so that changes in springs from normal to heavy duty (which the operator may be incapable of identifying ) can considerable affect the result.Each make of machine had its own characteristics, but as the basic test principles were considered to be unacceptable these details will not be presented here.After due consideration the technical sub-committee advised the General Assembly of EuSAMA that although the existing machines, when correctly operated, could help to diagnose many faulty shock absorbers, a responsible association could not authorize such equipment as the parameters measured were not considered technically representative of any particular aspect ofroadworthiness.Taking brake testing as an example, it was noted that test machines give a direct reading of braking efficiency as a percentage of g without the need to identify vehicle type or to use reference manuals. Similarly, minimum braking performance levels can be set for all automobiles irrespective of model, so that a customer knows immediately if his brakes need attention, Some machines show brake imbalance, but do not indicate which component is faulty.Applying the same principles to vehicle suspension, it should be possible to propose a test which furnishes a direct reading as a value or preferably as a percentage, to indicate whether a suspension is considered satisfactory from the viewpoint of safety. Moreover, this must be achieved objectively, that is to say without need of any identification, interpretation or reference to manuals by the test operator.The technical sub-committee therefore looked for a parameter which could be considered a suitable criterion of safety in relation to vehicle suspension. As stated earlier, there is only one component normally subject to deterioration with use—the shock absorber. So the role of the shock absorbers must first be defined. These have two functions to perform: to damp the movement of the vehicle body on its springs and to control wheel bounce.The permitted movement of a vehicle body on its springs is very much a matter of taste, and it is largely in the control of such movement that a sports shock absorber differs in damping characteristics from a shock absorber aimed at optimum comfort. The movement of a body on its springs does, of course, materially influence roadholding but in reality few ordinary drivers are capable of reaching the limits of the modern car in this respect, so the value of body damping is relatively unimportant for safety measurements. In any case, most drivers of a vehicle with poor body damping will quickly limit their speed and manoeuvres to the vehicle’s handling capacity.Wheel bounce, on the other hand, is a measurable phenomenon and the dangers of vehicles with uncertain wheel contact are well known. Both cornering and braking performance are well known. Both cornering and brakingperformance are limited by tyre anherence to the road; this is dependent on the vertical wheel contact as well as the tyre’s own properties.A parameter which permits the objective measurement of one aspect of roadholding, and therefore of vehicle suspension safety, was thus isolated but it was still necessary to be able to express it in terms that could be readily interpreted.It was proposed, therefore, to measure the minimum remaining vertical contact force between tyre and road under a given excitation at wheel-bounce frequency and to express it as a percentage of the static wheel load. Such a possibility was discussed at a meeting between the technical sub-committee and Dr Verschoore of the University of Ghent. A general concensus of opinion in favour of such a test was reached, though some members expressed doubts concerning the possibility of measuring this parameter in practice, as well as doubts concerning the results Aparamet。