现代测试技术课后答案
现代测试技术课后答案

现测课后习题答案第1章1. 直接的直接的 间接的间接的2. 测量对象测量对象 测量方法测量方法 测量设备测量设备3. 直接测量直接测量 间接测量间接测量 组合测量组合测量 直读测量法直读测量法 比较测量法比较测量法 时域测量时域测量 频域测量频域测量 数据域测量数据域测量4. 维持单位的统一,保证量值准确地传递维持单位的统一,保证量值准确地传递 基准量具基准量具 标准量具标准量具 工作用量具工作用量具5. 接触电阻接触电阻 引线电阻引线电阻6. 在对测量对象的性质、特点、测量条件(环境)认真分析、全面了解的前提下,根据对测量结果的准确度要求选择恰当的测量方法(方式)和测量设备,进而拟定出测量过程及测量步骤。
度要求选择恰当的测量方法(方式)和测量设备,进而拟定出测量过程及测量步骤。
7. 米(m) 秒(s) 千克(kg) 安培(A) 8. 准备准备 测量测量 数据处理数据处理9. 标准电池标准电池 标准电阻标准电阻 标准电感标准电感 标准电容标准电容第2章填空题1. 系统系统 随机随机 粗大粗大 系统系统2. 有界性有界性 单峰性单峰性 对称性对称性 抵偿性抵偿性3. 置信区间置信区间 置信概率置信概率4. 最大引用最大引用 0.6% 5. 0.5×10-1 [100.1[100.1ΩΩ,100.3100.3ΩΩ] 6. ±7.9670×10-4 ±0.04% 7. 测量列的算术平均值测量列的算术平均值8. 测量装置的误差不影响测量结果,但测量装置必须有一定的稳定性和灵敏度测量装置的误差不影响测量结果,但测量装置必须有一定的稳定性和灵敏度 9. ±6Ω10. [79.78V ,79.88V] 计算题 2. 解: (1)该电阻的平均值计算如下:128.504nii xx n===å该电阻的标准差计算如下:该电阻的标准差计算如下:21ˆ0.0331n i in n s ===-å(2)用拉依达准则有,测量值28.40属于粗大误差,剔除,重新计算有以下结果:属于粗大误差,剔除,重新计算有以下结果:28.511ˆ0.018x s ¢=¢=用格罗布斯准则,置信概率取0.99时有,n=15,a=0.01,查表得,查表得0(,) 2.70g n a =所以,所以,0ˆ(,) 2.700.0330.09g n a s =´=可以看出测量值28.40为粗大误差,剔除,重新计算值如上所示。
《现代检测技术及仪表》课后答案
《现代检测技术及仪表》习题解答第1章1-1答:钱学森院士对新技术革命的论述中说:“新技术革命的关键技术是信息技术。
信息技术由测量技术、计算机技术、通讯技术三部分组成。
测量技术则是关键和基础”。
如果没有仪器仪表作为测量的工具,就不能获取生产、科学、环境、社会等领域中全方位的信息,进入信息时代将是不可能的。
因此可以说,仪器技术是信息的源头技术。
仪器工业是信息工业的重要组成部分。
1-2答:同非电的方法相比,电测法具有无可比拟的优越性:1、便于采用电子技术,用放大和衰减的办法灵活地改变测量仪器的灵敏度,从而大大扩展仪器的测量幅值范围(量程)。
2、电子测量仪器具有极小的惯性,既能测量缓慢变化的量,也可测量快速变化的量,因此采用电测技术将具有很宽的测量频率范围(频带)。
3、把非电量变成电信号后,便于远距离传送和控制,这样就可实现远距离的自动测量。
4、把非电量转换为数字电信号,不仅能实现测量结果的数字显示,而且更重要的是能与计算机技术相结合,便于用计算机对测量数据进行处理,实现测量的微机化和智能化。
1-3答:各类仪器仪表都是人类获取信息的手段和工具。
尽管各种仪器仪表的型号、原理和用途不同,但都由三大必要的部分组成:信息获取部分、信息处理部分、信息显示部分。
从“硬件”方面来看,如果把常见的各类仪器仪表“化整为零”地解剖开来,我们会发现它们内部组成模块大多是相同的。
从“软件”方面来看,如果把各个模块“化零为整”地组装起来,我们会发现它们的整机原理、总体设计思想、主要的软件算法也是大体相近的。
这就是说,常见的各类仪器仪表尽管用途、名称型号、性能各不相同,但它们有很多的共性,而且共性和个性相比,共性是主要的,它们共同的理论基础和技术基础实质就是“检测技术”。
常见的各类仪器仪表只不过是作为其“共同基础”的“检测技术”与各个具体应用领域的“特殊要求”相结合的产物。
1-4答:“能把外界非电信息转换成电信号输出的器件或装置”或“能把非电量转换成电量的器件或装置”叫做传感器。
现代测试技术习题解答第二章信号的描述与分析副本
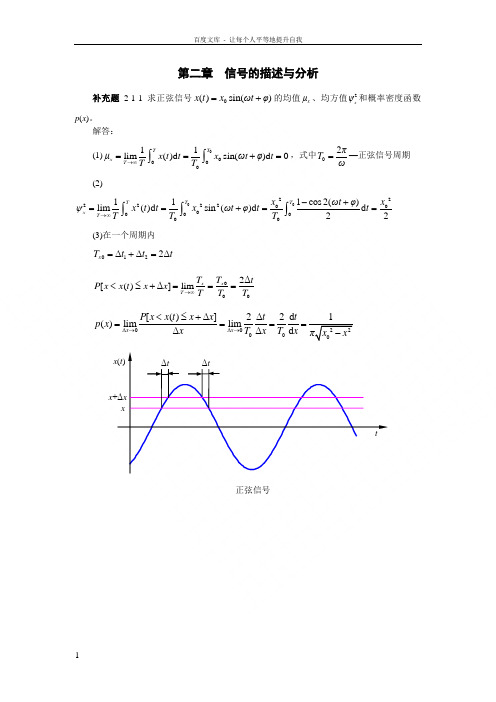
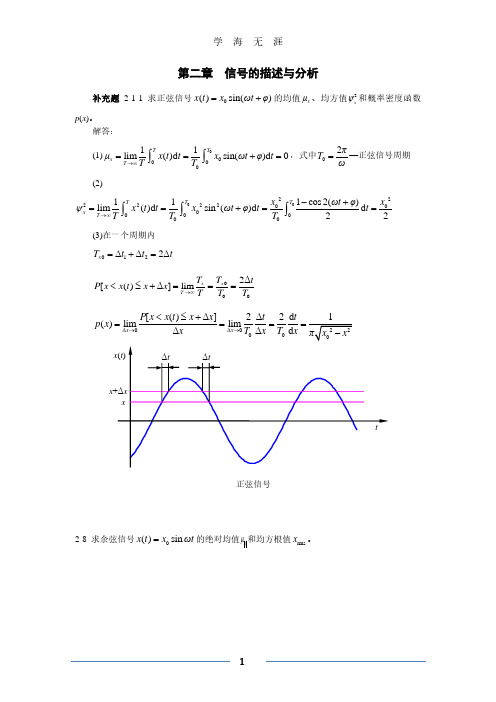
第二章 信号的描述与分析补充题2-1-1 求正弦信号0()sin()x t x ωt φ=+的均值x μ、均方值2x ψ和概率密度函数p (x )。
解答: (1)00011lim ()d sin()d 0TT x T μx t t x ωt φt TT →∞==+=⎰⎰,式中02πT ω=—正弦信号周期(2)2222220000111cos 2()lim()d sin ()d d 22TT T xT x x ωt φψx t t x ωt φt t TT T →∞-+==+==⎰⎰⎰(3)在一个周期内012ΔΔ2Δx T t t t =+=0002Δ[()Δ]limx x T T T tP x x t x x T T T →∞<≤+===22Δ0Δ0000[()Δ]2Δ2d ()limlim ΔΔd x x P x x t x x t t p x x T x T x πx x →→<≤+====-x (t )正弦信号xx +ΔxΔtΔtt2-8 求余弦信号0()sin x t x ωt 的绝对均值x μ和均方根值rms x 。
2-1 求图示所示锯齿波信号的傅里叶级数展开。
2-4周期性三角波信号如图所示,求信号的直流分量、基波有效值、信号有效值及信号的平均功率。
2-1 求图示所示锯齿波信号的傅里叶级数展开。
补充题2-1-2 求周期方波(见图1-4)的傅里叶级数(复指数函数形式),划出|c n|–ω和φn–ω图,并与表1-1对比。
解答:在一个周期的表达式为00 (0)2() (0)2T A t x t T A t ⎧--≤<⎪⎪=⎨⎪≤<⎪⎩积分区间取(-T/2,T/2)00000002202002111()d =d +d =(cos -1) (=0, 1, 2, 3, )T T jn tjn tjn t T T n c x t et Aet Ae tT T T Ajn n n ωωωππ-----=-±±±⎰⎰⎰所以复指数函数形式的傅里叶级数为001()(1cos )jn tjn t n n n Ax t c ejn e n∞∞=-∞=-∞==--∑∑ωωππ,=0, 1, 2, 3, n ±±±。
现代检测技术_武汉理工大学中国大学mooc课后章节答案期末考试题库2023年

现代检测技术_武汉理工大学中国大学mooc课后章节答案期末考试题库2023年1.当环境温度一定时,霍尔传感器可做成()。
答案:乘法器2.变面积型电容传感器的电容相对变化量与位移成。
答案:正比3.误差按表示方法分为绝对误差和相对误差,其中示值误差属于()。
答案:示值相对误差4.差动式电容传感器可以减小误差。
答案:非线性5.下列何种光电器件的光照特性近似线性()。
答案:光敏二极管6.应变片受恒力作用时,应变电阻值随时间而变化,这种现象称为()。
答案:蠕变7.人工陶瓷沿Z轴给力时,将产生向压电效应。
答案:纵8.石英晶体的沿X轴产生向压电效应。
答案:纵9.石英晶体中,X轴又称为()。
答案:电轴10.利用霍尔传感器测位移,是利用了磁感应强度是的函数。
答案:位置11.金属应变片的结构主要有金属丝、金属箔、三种。
答案:金属薄膜12.光电管和光电倍增管都是基于()效应的。
答案:外光电效应13.半导体应变片的应变效应主要由的变化所引起。
答案:电阻率14.在传感器静态特性指标中,描述传感器在输入量按同一方向行程中连续多次测量所得特性曲线不一致程度的指标是。
答案:重复15.下面那种不是霍尔传感器不等位电势的产生原因()。
答案:空载电势的存在16.在机器系统和人体系统的对应关系中,下面哪个描述是错误的。
()答案:由计算机获取外界信息17.霍尔电流传感器是通过霍尔电势表达式中的变化来测量的。
答案:磁场##%_YZPRLFH_%##B##%_YZPRLFH_%##磁场大小18.在下列应变式传感器的测量电路中,哪种电路存在非线性误差()。
答案:单臂桥19.传感器的国标符号中,三角形表示元件。
答案:敏感D图像传感器按结构可分为帧转移式和转移式。
答案:行间##%_YZPRLFH_%##行21.线阵CCD中,单通道结构比双通道()。
答案:成本低22.光纤陀螺属于()。
答案:功能性光纤传感器23.光电效应分为内光电效应和外光电效应两种,其中光敏电阻的光电效应为。
智慧树答案现代检测技术知到课后答案章节测试2022年
第一章1.用以标定的仪器,直接的测量出某一待测未知量的量值称为()。
答案:直接测量2.下列哪项不是闭环控制型现代测试系统的优点()。
答案:远距离传输3.下列属于测量过程的是()。
答案:被测对象;数值和计量单位;测试方法;测量误差4.水银温度计测量体温属于直接式测量。
答案:对5.测试技术与传感技术被称为信息技术系统的()。
答案:感官第二章1.下列非线性补偿方法中属于软件补偿的是()。
答案:拟合法2.A类标准不确定度是用非统计方法得到的不确定度。
答案:错3.真值在实际测量中是可以确切获知的。
答案:错4.相对误差是绝对误差与测量仪表量程之比。
答案:错5.将63.73501四舍五入,保留两位小数为()。
答案:63.74第三章1.直流电桥可以测量电容的变化。
答案:错2.全桥接法的灵敏度是半桥双臂接法的几倍()。
答案:23.半导体式应变片比金属丝式应变片的灵敏度高。
答案:对4.丝式应变片采用栅状结构是为了获得大的电阻变化量。
答案:对5.下列哪项不是半导体应变片的优点()。
答案:温度稳定性能好第四章1.下列哪项是电容式传感器的缺点()。
答案:电缆分布电容影响大2.电容式传感器灵敏度最高的是()。
答案:极距变化型3.电涡流传感器是利用()材料的电涡流效应工作的。
答案:金属导体4.互感型传感器接入任何电路均可以测量位移的大小和方向。
答案:错5.相敏解调法只能回复被测信号的幅值,而不能恢复相位。
答案:错第五章1.恒磁通式传感器中线圈和磁铁之间没有相对运动。
答案:错2.压电式传感器有较好的低频特性。
答案:错3.固态传感器线性范围宽、参数离散型小。
答案:错4.霍尔元件多采用P型半导体材料。
答案:错5.磁敏三极管具有正反磁灵敏度,而磁阻器件没有。
答案:对第六章1.光电效应按原理又分为哪几种?答案:光生伏特效应;外光电效应;内光电效应2.光电管的光照特性:通常指当光电管的阳极和阴极之间所加电压一定时,光通量与光电流之间的关系。
现代测试技术A课后题参考答案

1) 下面哪个部件不属于透射电镜的电子光学系统(A)A.扩散泵B.电子枪C.中间镜D.荧光屏2)像差是影响透射电镜成像的主要因素,像差分为三种类型,下面不属于像差的是(C)A.像散B.色差C.色散D.球差3) 如没特别指明,扫描电子显微镜的分辨率通常是指用何种信号成像时的分辨率(D)A.俄歇电子B.透射电子C.背散射电子D.二次电子4) 透射及扫描电镜的电子枪有多种类型,除W灯丝和场发射灯丝外,还有一种是(C)A. PaB6B. TaB6C. LaB6D. GaB65) 用配有能谱仪的扫描电子显微镜不能进行分析的是下列哪一项(C)A.背散射电子像B.微区成分分析C.选区电子衍射D.二次电子像6)电子束与固体样品相互作用产生的物理信号中可用于分析200 nm厚表层形貌的信号是(C)。
A.二次电子B.吸收电子C.背散射电子D.透射电子7)透射电镜中的主要光阑包括(ABC)A.物镜光阑B.选区光阑C.聚光镜光阑D.孔径光阑8) 关于透射电子衍射,和X射线衍射相比较,说法正确的是(ABC)。
A.衍射半角小B.电子波的波长短C.可以和微区结构和形貌同步分析D.衍射强度小9) 以布拉格方程为基本原理的材料分析方法有(ABCD)。
A.透射电子衍射B.X射线衍射C.背散射电子衍射D.波谱分析10) 扫描电子显微镜主要利用(AB)成像。
A.背散射电子B.二次电子C.俄歇电子D.透射电子11) 像散是由于电磁透镜的中心区域和边沿区域对电子的会聚能力不同而造成的。
(X)12)在电子显微分析中,电子的波长是由磁透镜的强弱决定的。
(X)13)透射电镜中的明、暗场像是利用相位衬度进行成像。
(X)14)电子探针工作原理是利用波谱和能谱进行定性、定量分析。
(√)15)电子探针分析中背散射电子像的衬度取决于试样的凹凸状态。
(X)16)透射电镜中多晶体的电子衍射花样是规则排列的衍射斑点。
(X)。
现代测试技术课后习题及答案
复习(重点)一、中期考试题(含第一、二、三章) 重点习题:二、填空选择题:第五、九、十章。
如: 1. ±1误差称为最大量化误差2.直接数字合成(DDS )技术的优缺点。
三、判断题第四、九章。
四、简答题:1.简单电路原理分析,如P155图4-6;锁相环倍频分频2.框图分析(简述) :测频、测周及时间间隔原理;示波器扫描发生器环组各部份的组成及作用;外差式频谱分析仪组成框图原理;逻辑分析仪 五、计算题:1.(含中期考试计算题)及第九章2.累进性系统误差、周期性误差的判别,简述测量数据处理的步骤(要求给出相应的公式及判据),例3-4。
3.计算由±1误差所引起的测周误差。
付加:1.现代自动测试系统特点2. PXI 总线的特点及应用领域?第一章一、填空题1.相对误差定义 与 的比值。
通常用百分数表示。
2.广义测量是指为了获得对被测对象 而进行的实验过程。
3.狭义测量测量是为了确定被测对象的 而进行的实验过程。
4.测量误差主要的来源 、 、 、 和 。
5.仪表的准确度越高,测量结果越 。
6.信息的的获取的过程是由 和 两大环节组成。
二、计算题1、用量程为10V 、1.5级的电压表分别测量3V 和8V 的电压,试问哪一次测量的准确度高?为什么?解:xm=10V,A1=3V ,A2=8V2、某被测电压为3.50V ,仪表的量程为5V ,测量时该表的示值为3.53V ,求:⑴ 绝对误差与修正值各为多少?%5.1%100=⨯∆=XmXm γ%5.110⨯=∆X %5%10011=⨯∆=A XA γ◆⑵实际相对误差及引用误差各为多少?◆⑶该电压表的精度等级属哪一级别?第二章◆一、选择题:◆ 1.从基本的测量对象来看,电子测量是对( ) 的测量。
◆ A.电信号 B. 电路C.电系数D.电参数◆ 2.测量系统的理想静态特性为().◆A.y=Sx+S0 B.y=Sx C.y=S D.y=Sx+S0+x2◆ 3. 电子信息技术应用在电子测量中的优点有()。
现代测试技术习题解答 第二章 信号的描述与分析 - 副本(2020年7月整理).pdf
没有偶次谐波。其频谱图如下图所示。
5
学海无涯
|cn| 2A/π 2A/π
2A/3π 2A/5π -5ω0 -3ω0 -ω0
2A/3π 2A/5π ω0 3ω0 5ω0 ω
φn
π/2 ω0 3ω0
-5ω0 -3ω0 -ω0 -π/2
幅频图
周期方波复指数函数形式频谱图
相频图
5ω0 ω
2-5 求指数函数 x(t) = Ae−at (a 0,t 0) 的频谱。
2-12 已知信号的自相关函数为 Acos,请确定该信号的均方值x2 和均方根值 xrms。
解:Rx()=Acos
x2= Rx(0)=A
xrms =
2 x
=
A
2-13 已知某信号的自相关函数,求均方值 、和均方根值 xrms 。
2-14 已知某信号的自相关函数,求信号的均值 μx 、均方根值 、功率谱。
1
学海无涯
2-1 求图示 2.36 所示锯齿波信号的傅里叶级数展开。 2
学海无涯
2-4 周期性三角波信号如图 2.37 所示,求信号的直流分量、基波有效值、信号有效值及信号 的平均功率。
3
学海无涯
2-1 求图示 2.36 所示锯齿波信号的傅里叶级数展开。
补充题 2-1-2 求周期方波(见图 1-4)的傅里叶级数(复指数函数形式),划出|cn|–ω 和 φn–ω 4
学海无涯
第二章 信号的描述与分析
补充题
2-1-1
求正弦信号
x(t)
=
x0
sin(ωt
+
φ)
的均值
μx
、均方值
ψ
2 x
和概率密度函数
p(x)。 解答:
现代检测技术第二版课后习题

第二章课后习题作业2.1 为什么一般测量均会存在误差?解:由于检测系统不可能绝对精确,测量原理的局限,测量算法得不尽完善,环境因素和外界干扰的存在以及测量过程可能会影响被测对象的原有状态等因素,也使得测量结果不能准确的反映被测量的真值而存在一定误差。
2.2 什么叫系统误差?什么叫随机误差?它们产生的原因有哪些?解:在相同的条件下,多次重复测量同一被测参量时,其测量误差的大小和符号保持不变或在条件改变时,误差按某一确定的规律变化,这种测量误差称为系统误差。
产生系统误差的原因:①测量所用工具本身性能不完善或安装布置调整不当;②在测量过程中因湿度、气压、电磁干扰等环境条件发生变化;③测量方法不完善或测量所依据的理论本省不完善。
在相同条件下多次重复测量同一被测参量时,测量误差的大小与符号的大小均无规律变化,这类误差称为随机误差。
产生随机误差的原因:由于检测仪器或测量过程中某些未知无法控制的随机因素综合作用的结果。
2.3 什么叫绝对误差?什么叫相对误差?什么叫引用误差?解:绝对误差是检测系统的测量值X 与被测量的真值X 0之间的代数差值△x 。
0X -X x =△相对误差是检测系统测量值的绝对误差与被测量的真值的比值δ。
%100X x⨯=△δ 引用误差是检测系统测量值的绝对误差Δx 与系统量程L 之比值γ。
%100Lx⨯=△γ 2.4 工业仪表常用的精度等级是如何定义的?精度等级与测量误差是什么关系?解:工业检测仪器常以最大引用误差作为判断精度等级的尺度,最大引用误差去掉百分号和百分号后的数字表示精度等级。
2.5被测电压范围是0~5V ,现有(满量程)20V 、0.5级和150V 、0.1级两只电压表,应选用那只电表进行测量?解:两种电压表测量所产生的最大绝对误差分别是: |ΔX 1max |=|γ1max | * L 1=0.5% * 20=0.1V |ΔX 2max |=|γ2max | * L 2=0.1% * 150=0.15V 所以|ΔX 1MAX |<|ΔX 2mac | 故选用20、0.5级电压表。
现代测试技术思考题答案

1、回弹法检测混凝土强度时的影响因素有哪些?答:1.回弹仪测试角度的影响。
在非水平故应进行修正。
2.混凝土不同浇筑面的影响。
要尽量选择在构件的侧面,否则要进行修正。
3.龄期和碳化的影响。
随着龄期的增长,混凝土表面产生碳化现象,表面硬度随碳化深度的增加逐步增大,这会影响对混凝土强度值的推定。
因此,必须量测和考虑碳化深度的影响。
4.养护方法和温度的影响。
自然养护的回弹值高于标准养护的回弹值。
混凝土表面湿度愈大,回弹值愈低,故应尽可能采用干燥状态的混凝土进行测试。
采用回弹仪测定混凝土表面硬度以确定混凝土抗压强度是根据混凝土硬化后其表面硬度(主要是混凝土内沙浆部分的硬度)与抗压强度之间有一定的相关关系。
通常,影响混凝土的抗压强度与回弹值的因素并不都是一致的,某些因素只对其中一项有影响,而对另一项不产生影响或影响甚微。
弄清这些影响因素的作用及影响程度,对正确制订及选择测强曲线、提高测试精度是很重要的。
我国回弹发研究成果基本只适用普通混凝土(由水泥、普通碎(卵)石、砂和水配制的质量密度为1950~2500Kg/m3的混凝土)。
一、原材料混凝土抗压强度大小主要取决于其中的水泥沙浆的强度、粗集料的强度及二者的粘结力。
混凝土的表面硬度除主要与水泥沙浆强度有关外,一般和粗骨料与沙浆的粘结力以及混凝土内部性能关系并不明显。
1、水泥浙江省建研院的试验结果表明:当碳化深度为零或同一碳化深度下,用普通硅酸盐水泥、矿渣硅酸盐水泥及粉煤灰硅酸盐水泥的混凝土抗压强度与回弹值之间的基本规律相同,对测强曲线没有明显差别。
自然养护条件下的长龄期试块,在相同强度条件下,已经碳化的试块回弹值高,龄期越长,此现象越明显。
这主要是不同水泥品种的混凝土碳化速度不同引起的。
广州市建筑科学研究所和冶金部第十七冶金建设公司建研所、陕西省建研院试验后认为:用于普通混凝土的五大水泥品种不同标号、不同用量对回弹法的影响在考虑了碳化深度的条件下,可以不考虑。
现代测试技术作业答案(北京理工大学)
1.给出计算机AD采集频率最佳的选择方法。
答:A/D采样的最佳方法:(1)周期信号:fs≥(10-100)fx;(2)非周期信号:fs≥(500-3000)HZ;(3)瞬态信号:fs≥(1-100)MHZ2.论述计算机采集程序的设计依据答:(1)、设计技术参数(2)、分析满足指标硬件及程序语言的选择(3)、按功能分解图(4)、计算方法(5)、数据描述(6)、界面设计(7)、程序性能调试,用标准信号调试3.测试系统理论分析和标定分析方法有什么不同?答:理论分析是定义性的,理论性的计算系统的传递函数,而标定分析是要通过输入已知信号得到标定数据求出真实的数学模型,系统的性能指标等。
4.测试系统的静态标定的作用是什么?如何实现的举例说明。
[1].确定测试系统的最佳工作参数[2].确定测试系统的数据处理参数[3].求出测试系统的拟合直线方程[4].确定测试系统的静态性能指标[5].测试计量领域中的量值传递5.测试系统的动态标定的作用是什么?如何实现举例说明。
[1].确定测试系统的最佳工作参数[2].确定测试系统的动态数学模型[3].确定测试系统的动态性能指标[4].确定测试系统的幅频特性和相频特性[5].测试系统补偿传递函数的设计依据[6].确定测试系统在不同频率下的幅频特性误差[7].测试系统时域转换为频域的计算[8].测试计量领域的量值传递应用6.某个发动机实验测试数据不合理,分析产生原因和解决方法。
[1].测试条件,如安装等不合理选择最佳测试条件[2].传感器选用不合理更换量程精度合理的传感器[3].测试系统设计不合理改进测试系统或者重新设计[4].测试对象选择不合理重新选择合理的测试对象7.测试系统的数学模型采用什么方法得到?给出验证正确的方法[1].确定系统的最佳工作条件[2].选择最佳输入信号[3].依据记录曲线测τ,σ,T p,M1,M n,t n[4].计算系统动态特性参数:ωn,ξ,τ[5].依据记录数据写出传递函数[6].计算结果代入系统传递函数[7].数学模型的检验:ΔA(ω)=0.1%8.测试信号的分析技术和测试信号的计算处理技术有何不同?[1].数学计算方法不同:信号分析采用相关分析,DFT,FFT,PPF等分析;信号处理采用常规的计算方法。
现代检测技术第二版课后习题

第二章课后习题作业2.1 为什么一般测量均会存在误差?解:由于检测系统不可能绝对精确,测量原理的局限,测量算法得不尽完善,环境因素和外界干扰的存在以与测量过程可能会影响被测对象的原有状态等因素,也使得测量结果不能准确的反映被测量的真值而存在一定误差。
2.2 什么叫系统误差?什么叫随机误差?它们产生的原因有哪些?解:在一样的条件下,多次重复测量同一被测参量时,其测量误差的大小和符号保持不变或在条件改变时,误差按某一确定的规律变化,这种测量误差称为系统误差。
产生系统误差的原因:测量所用工具本身性能不完善或安装布置调整不当;在测量过程中因湿度、气压、电磁干扰等环境条件发生变化;测量方法不完善或测量所依据的理论本省不完善。
在一样条件下多次重复测量同一被测参量时,测量误差的大小与符号的大小均无规律变化,这类误差称为随机误差。
产生随机误差的原因:由于检测仪器或测量过程中某些未知无法控制的随机因素综合作用的结果。
2.3 什么叫绝对误差?什么叫相对误差?什么叫引用误差?解:绝对误差是检测系统的测量值X 与被测量的真值X 0之间的代数差值△x 。
0X -X x =△相对误差是检测系统测量值的绝对误差与被测量的真值的比值δ。
%100X x⨯=△δ 引用误差是检测系统测量值的绝对误差Δx 与系统量程L 之比值γ。
%100Lx⨯=△γ 2.4 工业仪表常用的精度等级是如何定义的?精度等级与测量误差是什么关系?解:工业检测仪器常以最大引用误差作为判断精度等级的尺度,最大引用误差去掉百分号和百分号后的数字表示精度等级。
2.5被测电压围是0~5V ,现有(满量程)20V 、0.5级和150V 、0.1级两只电压表,应选用那只电表进行测量?解:两种电压表测量所产生的最大绝对误差分别是: |ΔX 1max |=|γ1max | * L 1=0.5% * 20=0.1V |ΔX 2max |=|γ2max | * L 2=0.1% * 150=0.15V 所以|ΔX 1MAX |<|ΔX 2mac | 故选用20、0.5级电压表。
现代测试技术课后习题及答案
复习(重点)一、中期考试题(含第一、二、三章)重点习题:二、填空选择题:第五、九、十章。
如:1. ±1误差称为最大量化误差2.直接数字合成(DDS)技术的优缺点。
三、判断题第四、九章。
四、简答题:1.简单电路原理分析,如P155图4-6;锁相环倍频分频2.框图分析(简述):测频、测周及时间间隔原理;示波器扫描发生器环组各部份的组成及作用;外差式频谱分析仪组成框图原理;逻辑分析仪五、计算题:1.(含中期考试计算题)及第九章2.累进性系统误差、周期性误差的判别,简述测量数据处理的步骤(要求给出相应的公式及判据),例3-4。
3.计算由±1误差所引起的测周误差。
付加:1.现代自动测试系统特点2. PXI总线的特点及应用领域?第一章一、填空题1.相对误差定义 与 的比值。
通常用百分数表示。
2.广义测量是指为了获得对被测对象 而进行的实验过程。
3.狭义测量测量是为了确定被测对象的 而进行的实验过程。
4.测量误差主要的来源 、 、 、 和 。
5.仪表的准确度越高,测量结果越 。
6.信息的的获取的过程是由 和 两大环节组成。
二、计算题1、用量程为10V 、1.5级的电压表分别测量3V 和8V 的电压,试问哪一次测量的准确度高?为什么?解:xm=10V,A1=3V,A2=8V2、某被测电压为3.50V ,仪表的量程为5V ,测量时该表的示值为3.53V ,求:◆ ⑴ 绝对误差与修正值各为多少?◆ ⑵ 实际相对误差及引用误差各为多少?◆ ⑶ 该电压表的精度等级属哪一级别?第二章◆ 一、选择题:%5.1%100=⨯∆=Xm X m γ%5.110⨯=∆X %5%10011=⨯∆=A X A γ◆ 1.从基本的测量对象来看,电子测量是对( ) 的测量。
◆ A.电信号 B. 电路C.电系数D.电参数◆ 2.测量系统的理想静态特性为().◆A.y=Sx+S0 B.y=Sx C.y=S D.y=Sx+S0+x2◆ 3. 电子信息技术应用在电子测量中的优点有()。
现代测绘新技术(山东联盟)智慧树知到课后章节答案2023年下山东农业工程学院
现代测绘新技术(山东联盟)智慧树知到课后章节答案2023年下山东农业工程学院第一章测试1.天宝的机器人全站仪S8和徕卡的测量机器人TM30,它们都是由普通()发展而来。
A:全站仪 B:水准仪 C:其余全不是 D:经纬仪答案:全站仪2.在变形监测中,当人员不能进入或者危险情境下,以下哪种仪器设备可以发挥其很好的作用()A:机器人全站仪 B:水准仪 C:全站仪 D:GPS 答案:机器人全站仪3.我国南方测绘仪器公司和日本索佳测绘仪器公司生产的全自动陀螺全站仪,是在常规经纬仪仪和陀螺仪的基础上研发出来的,这种仪器大大提高了定向的精度和速度。
A:对 B:错答案:错4.从静态到实时动态不是现代测绘新技术的特点()A:对 B:错答案:错5.世界已建成和即将建成的全球卫星导航系统包括()A:俄罗斯的GLONASS系统 B:中国的北斗系统 C:美国的GPS系统 D:欧盟的Galileo系统答案:俄罗斯的GLONASS系统;中国的北斗系统;美国的GPS系统;欧盟的Galileo系统第二章测试1.从国际上来说,坐标系分为:地理坐标系和投影坐标系()A:对 B:错答案:对2.下列哪个属于投影坐标系()A: WGS84坐标系 B:高斯投影坐标系 C:西安80坐标系 D:北京54坐标系答案:高斯投影坐标系3.WGS84地理坐标系常采用UTM投影坐标系。
()A:对 B:错答案:对4.在布尔沙七参数法中,用到了那几个参数()A:平移参数 B:方向参数 C:旋转参数 D:尺度参数答案:平移参数;旋转参数;尺度参数5.在实际工作中我们需要根据不同的情况来选择最适宜的转换模型和方法来进行坐标转换。
()A:错 B:对答案:对第三章测试1.电源指示灯亮起()个至少可以满足仪器正常工作。
A:1 B:4 C:2 D:3 答案:22.由于北斗的卫星颗数少,因此可以有效提升多路径环境下的定位效率()A:对 B:错答案:错3.陀螺仪的特征是什么()A:定轴性 B:动轴性 C:进动性 D:固定性答案:定轴性;进动性4.华测X12惯导RTK可以在高楼和树荫下可以进行正常工作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
现测课后习题答案第1章1. 直接的间接的2. 测量对象测量方法测量设备3. 直接测量间接测量组合测量直读测量法比较测量法时域测量频域测量数据域测量4. 维持单位的统一,保证量值准确地传递基准量具标准量具工作用量具5. 接触电阻引线电阻6. 在对测量对象的性质、特点、测量条件(环境)认真分析、全面了解的前提下,根据对测量结果的准确度要求选择恰当的测量方法(方式)和测量设备,进而拟定出测量过程及测量步骤。
7. 米(m) 秒(s) 千克(kg) 安培(A)8. 准备测量数据处理9. 标准电池标准电阻标准电感标准电容第2章填空题1. 系统随机粗大系统2. 有界性单峰性对称性抵偿性3. 置信区间置信概率4. 最大引用0.6%5. 0.5×10-1[100.1Ω,100.3Ω]6. ±7.9670×10-4±0.04%7. 测量列的算术平均值8. 测量装置的误差不影响测量结果,但测量装置必须有一定的稳定性和灵敏度9. ±6Ω10. [79.78V,79.88V]计算题 2. 解:(1)该电阻的平均值计算如下:128.504nii xx n===∑该电阻的标准差计算如下:ˆ0.033σ=(2)用拉依达准则有,测量值28.40属于粗大误差,剔除,重新计算有以下结果:28.511ˆ0.018x σ'='=用格罗布斯准则,置信概率取0.99时有,n=15,a=0.01,查表得0(,) 2.70g n a =所以,0ˆ(,) 2.700.0330.09g n a σ=⨯=可以看出测量值28.40为粗大误差,剔除,重新计算值如上所示。
(3) 剔除粗大误差后,生于测量值中不再含粗大误差,被测平均值的标准差为:ˆ0.0048σσ''== (4) 当置信概率为0.99时,K=2.58,则()0.012m K V σ'∆=±=±由于测量有效位数影响,测量结果表示为28.510.01x x m U U V =±∆=±4. 解: (1)(2) 最大绝对误差∆Um=0.4,则最大相对误差=0.4%<0.5% 被校表的准确度等级为0.5(3) Ux=75.4,测量值的绝对误差:∆Ux=0.5%×100=0.5mV相对误差:r=0.5/75.4=0.63%(4) 此误差属于系统误差,消除系统误差可以通过:1、选择过高准确度等级的仪器设备;2、严格按照仪器工作要求操作;3、选择合理的测量方法;4、提高测量人员的测量水平 等几个方面来消除系统误差。
6. 解: ① 300V 、0.5级电压表的相对误差1(300/80)0.5% 1.88%γ=±⨯= ② 100V 、1.0级电压表的相对误差2(100/80) 1.0% 1.25%γ=±⨯= 12γγ>,所以选100V 、0.1级的表较好。
12. 解:()lg lg 0.24lg lg lg 0.24lg 20.40.10.5% 1.0%Q I R tdQ dI dR dtQ I R t=++++=++=±++=±第3章填空题1. 1. 测量系统有效辨别输入量最小变化量的能力 / 能分辨出最小的分辨量2. 微分方程 频率特性 测量动态信号3. 2441()[1()] 1.51010H j ωωω=-+⨯4. 零位点 灵敏度 分辨力 量程 迟滞 重复性 线性度 准确度 可靠性计算题 1. 解:已知一阶系统的频率特性为()1KH j j ωωτ=+由题知10s τ=,1K =,则所给系统的频率特性为1()110H j j ωω=+,其幅频特性为()H j ω=相频特性()arctan(10)ϕωω=-(1)当输入频率0ω=时,有(0)1H =,(0)0ϕ= (2)当输入频率11228040f πωππ==⨯=时,有()0.78640H jπ==, ()arctan(10)38.14040o ππϕ=-⨯=- (3)当输入频率212216080f πωππ==⨯=时,有()0.93180H jπ==, ()arctan(10)21.48080o ππϕ=-⨯=-综上,该热电偶的输出表达式为1212500200.786sin(238.1)100.931sin(221.4)50015.72sin(238.1)9.31sin(221.4)o o oof t f t f t f t ππππ+⨯-+⨯-=+-+-2. 解:(1) 转折频率22100628f ττωππ==⨯= rad/s 时间常数110.00159 1.59628s ms ττω==== (2) 测量系统的频率特性11()110.00159W j j j ωωτω==++ 幅频特性()W j ω==相频特性a r c t a n ()a r c t a n 0.00ϕωτω=-=- (3) 依题意有11%0.1422001408(/)0.142rad s ττγωωω=-≤⇒≤=⇒≥=即转折频率8845f τ≥Hz 。
3. 解:(1)该系统为一阶系统,对比一阶系统传递函数 ()1KW s s τ=+ 有44105()1020.5101W s s s --==+∙+得时间常数40.5100.05s ms τ-=⨯= 直流增益K=5。
(2)转折频率41131852220.510f Hz ττωππτπ-====⨯⨯(3) 当测量信号的频率为转折频率的0.5倍时,系统产生的动态幅值误差110.10610.6%γ=-=-=-=-欲将动态幅值误差限制在5%,经过计算,0.329τωω≤,即要想该一阶系统满足动态误差要求,则系统的转折频率应比信号的最高频率大至少3倍。
我们可以通过扩展系统的频带来改善其动态性能,主要采用两种形式:数字滤波和频域校正法。
4. 解:(1) 对二阶系统,有:5010/0.1w rad s ζ==固有频率阻尼系数 对一阶系统,有:41210s τ=⨯则有:4210/w rad s τ=⨯0.24000/w w rad s τ==()2021121120.10.021.79%γωζω=-⎛⎫+ ⎪⎝⎭=-+⨯⨯=(2)15%γ=-≤得: m a x 0.331050.4HZf f τ==5. 解: (1)()441350551011010/1.59102100.2100.1210101K s rad sf HzK ττττωωπωζ---=====⨯==⨯==⨯⨯=(2)4422 1.592 3.14109.9852101121110.5%100.1997H HHfωπγωζω==⨯⨯⨯=⨯=-⎛⎫+ ⎪⎝⎭⎛⎫=⨯-=-⎪⎝⎭6. 解:()()1.3~4100%2%5%2.s sssssy t ytytzτττ-=⨯=∆=∆说明:本题有两种解法因为已捕捉到响应曲线,所以根据自控理论,时,或者,由此可确定,也可以用确定,这里采用前法。
()11111222239407390.0254077740.01344226176.9,0~76.9bTt tf ft t y tt t t sf Hz f Hztzτττττ''===-'===''==∴===⨯⨯===∆=∆解法:有表格知时,格,所以,则注意:当响应曲线难以捕捉时,最好的办法是()()()()111129%1190%11W jjdy ty t u tdtγγωωττ=-=-=-==-=-=++=一阶系统9. 解:111γ===-(1)T=1s,155.2%γ=-(2)T=2s,129.2%γ=-=-(3)T=3s,116.8%γ=-=-10. 解:80.05(21)12.75T C C =︒⨯-=︒13. 解:15%γ=-≤,而ω=2πf=200π可得:τ≤5.2×10-4(s ),系统带宽f τ≥1923Hz 同理,当ω=2πf=100π时,此时动态幅值误差:'-1.31%y ==相差角:φ=-arctan(ωτ)=-9.33第4章填空题1. 量程 转换时间 分辨力2. 传感器 调理电路 数字采集卡 计算机3. 避免自热效应产生影响4. 高频 分布电容5. 灵敏度 非线性误差6 捕获模拟输入量在采样时刻的数值,且将该数值维持不变送入A/D 转换器入口,维持时间至少大于A/D 转换器的转换时间7 转换时间8 采用一种专用补偿导线来延长热电偶,使冷端移到不受热端温度影响的远处,从而获得一个虽不为0℃但却是一个较为稳定的冷端温度T 09. 三步测量法10. (1)效零 输入标准值 x=0 测得R y =0y(2)标定 输入标准值 x1测得 y1=R y +Ax1(3)测量 输入x 测得y则11111111RR R y y y y y y x x x x x A y y y y ---=+=+=--不能消除该干扰影响,因为三步测量法要求在三步测量的时间段之内0y ,A 均得恒不变。
在三步之外可以有变化。
但0y 为工频干扰量。
时刻都在变化。
故该法不能消除其影响。
计算题1. 1. 解:(1) q=5000/28=19.5mv (2) 12.2119.5300k ⨯⨯= 得 19.5300479.512.2k ⨯== (3) 12.2479.55000300m T ⋅⨯= 得 05000300256479.512.2m T C ⨯==⨯ (4)由中间温度定律E(T,0)=E(T,T 1)+E(T 1,0) =6.1+0.8 =6.9mv查表 ∴ T=170℃2. 解:(1)依题意得系统最大量化值1010000.01m MPaD MPa==,故至少选择10位的A/D其量化值105 4.8821Vq mV ==- (2)采用3mV 恒流源调理电路时00000003(10.1)0.10.13101000.03P N N u I R I R I R P I R PI R P P-∆=-=+-==⨯⨯⨯=当输入0.01MPa 时,min 0.030.010.3u mV ∆=⨯= 放大器的增益 4.8816.30.3mVK mV==(3)00(10.1)U I R P =+ 因为II ∆的误差为0.5% 得0.5%UU ∆=在测量时,认为该误差由压力引起 0.10.5%10.1U PU P∆∆==+ 0.1P mPa ∆= 3. 解:(1)设0(1)T R R AT =+,则301(1) 4.2510TR A C T R -=-=⨯Ω,0(1)1000.425T R R AT T =+=+,TTE T T E R R R U T T 425.0200275.12200425.0425.021+=⨯+=-+=(2)00,0T C U =︒=;1010,0.0624T C U V =︒=;100100,0.526T C U V =︒= (3)2255(2000.425)U S T T ∆==∆+,30 6.37510S V C -=⨯,310 6.11210S V C -=⨯︒, 3100 4.33610S V C -=⨯ (4)0.425(0.425200)85U T T E t S E ∆+∆∆==⨯,2)425.0200(255T U +=∆当0.3E V ∆=,6E V =,100T C =︒时,有最大测量误差为0.425100(0.425100200)0.36.0625856t C ⨯⨯⨯+∆=⨯=︒7. 解: (1)2001000210.2n CC︒=≤-︒,可取n=10;即A/D 转换器位数为10;(2) )(925.15385.0)(0mV t t I R R U t =⨯=⨯-=当0.2t C =︒,)(385.02.0925.1mV U =⨯=∆ 量化值)(95.12/200010mV q ==,则5385.095.1==∆=U q K 测温范围为C T ︒=⨯⨯=8.207385.052.02000max ,大于200︒C ,满足设计要求。