浅谈ARMLPC2136在电动机保护装置上的实现
ARM微处理器LPC2132的智能电动机保护器设计

ARM微处理器LPC2132的智能电动机保护器设计
1 引言
随着电动机控制中心(MCC)技术的发展,模块化的得到了越来越广泛的
应用,同时也对电动机保护提出了更高的要求。
针对电气监控系统自动化程度越来越高的发展趋势,用低压智能电动机保护控制器作为发电厂低压电动机的保护和测控,是提高电气监控系统运行维护水平的重要手段。
目前传统的8/16 位的单片机仍然广泛应用于电气保护中,但是他们仅仅具有基本的测量控制功能,在人机界面、数据查询、监控处理能力比较有限,大部分缺少网络通信功能。
在实现自动在线监测领域中,ARM 芯片在多目标
采集,多层次监测和网络化等方面具有强大的优势。
由于属于ARM7 系列处理器,能对多个采样点进行同时测量,具有强大的数据处理功能。
同时,保护器包括强大的网络功能和动作保护记录功能,支持开放式的通讯协议,构筑成有效的保护测控网络。
2 系统的功能特点
智能保护器主要是以LPC2132 微处理器为运算核心,含有模拟数字量采集,继电保护,界面显示和按键控制等功能模块。
系统外接标准的:RS 485 通信接口,实现与监控系统之间的数据传输和联系。
LPC2132 是一个支持实时仿真和跟踪的32 位ARM7TDMI-S 核的微处理器,并带64 kB 的高速FLASH 存储器,4 个通信接口,2 个32 位定时器,1 个10 位8 路ADC,2 个硬件铁电接口47 个GPIO 以及多达9 个边沿或电平触发的外部中断。
除可以完成传统测量控制保护的功能外,保护器在设计上主要具有以下特点:
针对继电保护中常出现的误动情况,把采样量测量突变瞬时启动和静稳。
以LPC2136为例说定时器控制原理
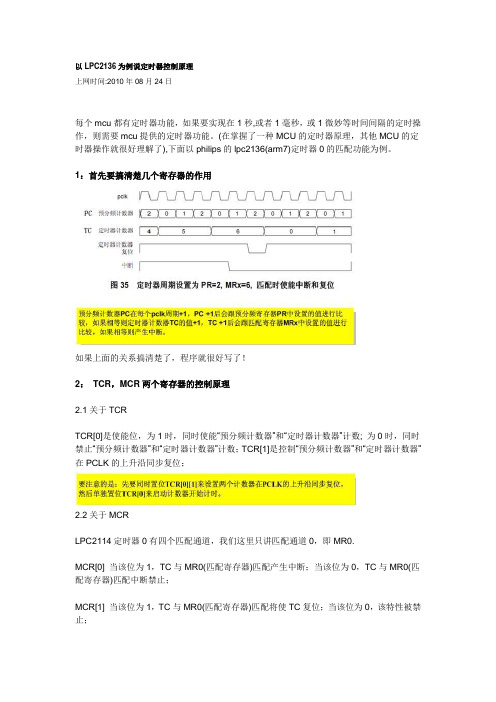
以LPC2136为例说定时器控制原理上网时间:2010年08月24日每个mcu都有定时器功能,如果要实现在1秒,或者1毫秒,或1微妙等时间间隔的定时操作,则需要mcu提供的定时器功能。
(在掌握了一种MCU的定时器原理,其他MCU的定时器操作就很好理解了),下面以philips的lpc2136(arm7)定时器0的匹配功能为例。
1:首先要搞清楚几个寄存器的作用如果上面的关系搞清楚了,程序就很好写了!2:TCR,MCR两个寄存器的控制原理2.1关于TCRTCR[0]是使能位,为1时,同时使能“预分频计数器”和“定时器计数器”计数; 为0时,同时禁止“预分频计数器”和“定时器计数器”计数;TCR[1]是控制“预分频计数器”和“定时器计数器”在PCLK的上升沿同步复位;2.2关于MCRLPC2114定时器0有四个匹配通道,我们这里只讲匹配通道0,即MR0.MCR[0] 当该位为1,TC与MR0(匹配寄存器)匹配产生中断;当该位为0,TC与MR0(匹配寄存器)匹配中断禁止;MCR[1] 当该位为1,TC与MR0(匹配寄存器)匹配将使TC复位;当该位为0,该特性被禁止;MCR[2] 当该位为1,TC与MR0(匹配寄存器)匹配将使TC和PC停止计数;当该位为0,该特性被禁止。
3 接下来就可以等待中断了对于一个新手来说也许你还是不知如何着手写程序,所以这就是入门的难处,当你对某个MCU会控制了,或者说入门了,那么再去写程序控制其他的MCU就很容易的,因为原理在那里,可以举一反三。
3.1 中断状态寄存器其实,不管是那个MCU中的哪个控制器,如I2C,SPI,Ethernet,LCD等等,都有一个中断状态寄存器,有些控制器还有其他状态寄存器!Lpc2136中的定时器0就有T0IR(中断寄存器)来指示当前是哪个中断发生,用户就可以通过读这个寄存器来判断。
如:我们这里设置了匹配通道0,即MR0。
我们可以在主程序中不断的读T0IR[0]位,如果为1则说明中断发生。
基于 LPC2136 的电力变压器防盗报警系统
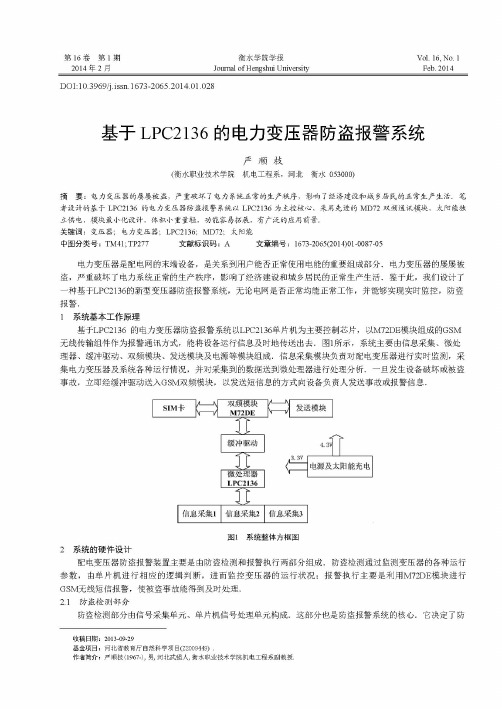
电力变 压 器 是配 电 网的 末端 设 备 ,是 关系 到 用户 能 否 正常 使用 电能 的重 要 组成 部分 .电 力变 压器 的屡屡 被 盗 ,严 重破 坏 了 电力 系统 正 常 的生 产秩 序 ,影 响 了经 济 建 设和 城乡 居 民 的正 常生 产 生活 .鉴 于此 , 我们 设计 了
图1 系统整体方框图
2 系统 的 硬件 设 计 配 电变 压 器 防盗 报 警装 置 主要 是 由 防盗 检测 和 报 警执 行 两部 分 组成 .防 盗检 测通 过 监 测变 压 器 的各 种 运行 参 数 , 由单 片机 进 行 相 应 的逻 辑 判 断 ,进 而 监 控 变 压 器 的 运 行 状 况 ; 报 警 执 行 主 要 是 利用 M7 2 DE 模 块 进 行 GS M无 线 短信 报 警 ,使 被盗 事 故 能得 到及 时 处理 .
立供 电,模块最小化 设计,体积小重量轻,功能容易拓展 ,有广泛的应用前景
关键词:变压器,电力变压器,L P C2 1 3 6 ; MD 7 2 ;太 阳能
中图分类号:T M4 1 , T P 2 7 7
文献标识码 : A
文章编号 :1 6 7 3 — 2 0 6 5 ( 2 0 1 4 ) 0 1 — 0 0 8 7 — 0 5
发 现 监 控 报警 设 各后 ,首 先想 到 的是 先 破坏 监 控 报 警设 各 , 于是 可 能使 用 重物 敲 击 报 警器 ,我 们 设 计 的报 警 器 外 壳 非 常 坚 固抗 冲击 , 而且 当 受 到强 烈冲 击 后 , 内部 振 动传 感 器连 续 接通 短 路 接地 , 其信 息 由 R1 1 2送 到 微 处 理器 L P C 2 1 3 6的 5 5 脚 ;施 盗 者 敲击 无 效 可能 想 到要 拆 卸报 警 器 , 图 2 所 示 ,微 处 理器 L P C 2 1 3 6的 4 8脚 实 时 发 送 检 删脉 冲 ,检 删 脉 冲经 Q l O 2 放 大后 加 到 红外 光 耦二 极 管 两端 , 由二 极 管发 送 红 外线 , 正常 情 况 下外 壳 上 的挡 片 把 红外 线 阻断 ,光 耦 三 极 管 截 止 当报 警 器 外 壳 打 开 后 挡 片 取 下 , 光 耦 三 极 管 受 红 外 线 照 射 导 通 , Ql O 2 有 高 电 平变 低 电 平 ,然 后 由微 处 理 器和 双 频 模块 发 送 “ 报 警 设 各被 打 开 ” 短信 ; 如 果施 盗 者 强行 拆 卸 变 压 器 , 串联 在 紧 固螺 丝 内 的断 线传 感 器 会被 断开 ,经 Ql O 2放 大后 的检删 脉 冲 被切 断 ,微 处 理 器 L P C 2 1 3 6的 9 脚 得 不 到检 删 脉 冲 , 由微 处理 器 和双 频 模块 发 送 “ 断线 传 感 器被 触 发 ”短 信 ;本 报 警 系统 还 可 以进 行变 压 器 冷 却油 丢 失报 警 电路 原 理 与断 线 报 警相 同
基于LPC2136的嵌入式实时机器人控制系统

Th mb d e e l i p r t g s se ,C/ ee e d d ra —t me o e a i y tm u OS n
一
Ⅱ i p re n o t e p af r . s s a e dvd d s o td it h lto m Ta k r iie
文献 标识码 : A
1 硬 件 设 计
根 据竞 技 机 器人 的功 能要 求 进行 总 体设 计 , 将 各个 功 能进行 模块 化 设计 , 制 系统 硬 件 如 图 1所 控 示 。 中央处理 器 采 用 微 控 制 器 结 构 , 以通 过 IP 可 S
( i n—s se p o rmmig 在 线 编 程 , 制 外 围设 ytm rg a n) 控
摘要 : 支持 实 时仿 真 和嵌 入 式 跟 踪 的 3 以 2位
ARM 7处 理 器 LP 2 3 C 1 6为 控 制 核 心 , 计 开 发 了轮 设
0 引 言
轮式 移动 机器人 是机 器人研 究领 域 的一项重 要
式机 器人控 制 系统硬 件 平 台, 过 IP对 系统 中的 通 S FahROM 进行在 线 编程 , 用 P ls 采 WM 的 方式 对 用
I
驱 动 电机 1 驱 动 电机2
,- -—-— -- — -- -.—--一 —- - -・ —-- -- - -
a c r i t t e r o t ol unc ins nd h r — c o d ng o h i c n r f to a t e e s u c on i a i n ft CU. e r bo sc — o r e c fgur to o he M Th o ti on t o ld i e l i e by t e db c i na s r le n r a —tm he f e a k sg l.
基于ARMLPA2136的智能电机保护器的研究作用
A M P 2 3 芯片为 主,通过 电压、 电流 等作为判 断故障 的依 据 。更好 的利用A M P 2 3 ,准确诊 断电机 的运行状态 ,对 电机 的各种故 障采取相 关的保护措施 。对 R LA 16 RLA 16 A M P 2 3 智能 电机保护器 中的关键器件及主 要电路进行分析 ,从软件设计来抗干 扰。电机保护装 置 目前代表着 电机保 护的发展方 向,由于人们对具有可靠性 的电 RLA 16 机保护 装置要求越来越 高,传 统的 电机保护 装置不能满足 要求,为我 国电气 自动化进度 的推 进 。因此 ,需要研制新 的基于硬件 平台的智 能电机 保护装置 ,提 高我 国 电气 的水平。 关键词 : A M P 2 3 ;电机保护 器;故障检测 R L A 16 中图分类 号:T 3 文献标 识码 :^ 文章编 号:1 7 —7 9 2 1 )0 2 1 1 0 M 6 1 5 7( 0 0 9 0 8 - 1
基于ARM的智能电动机保护器设
基于ARM的智能电动机保护器设
1 引言
随着电动机控制中心(MCC)技术的发展,模块化的智能电动机保护器得到了越来越广泛的应用,同时也对电动机保护提出了更高的要求。
针对电气监控系统自动化程度越来越高的发展趋势,用低压智能电动机保护控制器作为发电厂低压电动机的保护和测控,是提高电气监控系统运行维护水平的重要手段。
目前传统的8/16位的单片机仍然广泛应用于电气保护中,但是他们仅仅具有基本的测量控制功能,在人机界面、数据查询、监控处理能力比较有限,大部分缺少网络通信功能。
在实现自动在线监测领域中,ARM芯片在多目标采集,多层次监测和网络化等方面具有强大的优势。
由于LPC2132属于ARM7系列处理器,能对多个采样点进行同时测量,具有强大的数据处理功能。
同时,保护器包括强大的网络功能和动作保护记录功能,支持开放式的通讯协议,构筑成有效的保护测控网络。
2系统的功能特点。
MOSFET和IGBT驱动器IR2136及其在电机控制中的应用
使用潜油泵采油是油气生产的一个重要手 段,在采油中占有举足轻重的地位,是目前油田采 油的重要设备。而潜油电机是潜油泵采油装置中 保障机组正常运转的关键。其性能直接影响电泵 机组乃至电泵井的质量和寿命,同时影响到原油 产量及各项采油成本。目前,随着油田系统采油成 本的降低,潜油电机运转寿命能否延长是很重要 的。要想延长潜油电机的运转寿命,在其它条件不 变的情况下,只有通过降低潜油电机的电流,来降 低潜油电机自身温度的上升,并提高功率因数,降
本系统所用的IGBT是1MBH30D-060,采用开
Drive & Control
关频率为20kHz。此处IR2136S中的6路驱动脉冲用 于逆变桥P W M 交 流 伺 服 系 统 中 ,输 入 信 号 由 TMS320LF2407的全比较单元产生,R80-R85阻值为 4 7 Ω,R 77- R 79阻值为5 Ω,C 22、C 23、C 24电容大小为 1 µ F 。同时用D S P 的P W M 输入与I R 2 1 3 6 的6 路输入 端口用6N136进行隔离(图3中未表示)。其中,过流 信号的采样可由小电阻N P R3、N P R 4、N P R 5获得。
使用中应注意以下几点: (1)IR2136的故障输 出只有一个通道,在实际应用中很难判断是过流 还是欠压故障,特别是在上电过程中,必须控制电 源从0上升至某值。在此过程中,IR2136的故障输 出端因内部欠压而动作,将此信号作为过流信号 去触发前级电路时,如果前级保护电路具有自锁 功能,可能使电路无法起动。
成度,使整个系统的性能价格比大大提高。
参考文献
1 赵良炳编.现代电力电子技术.清华大学出版社. 2 Power Semicorductor Devices Application Handbook. 3 王成元等编著.矢量控制交流伺服驱动电动机[专著].机械工业出
ARM在微机保护装置中的应用
介绍一种应用于矿井低压电网的智能化保护测控装置,包括它的硬件组成、功能特点以及工作原理。
该装置基于LPC2292 ARM处理器;有RS485接口和以太网接口,运行可靠、操作方便、智能化高;可应用于交流50 Hz、660/1140V的中性点不接地的三相电网中,作为配电总开关或分支开关。
关键词ARM 微机保护LPC2292 馈电开关引言微机继电保护在我国的电力系统中得到了广泛的应用,基于不同微处理器的保护装置不断出现。
煤矿井下大多采用功能单一的电磁型继电器。
随着煤炭生产机械化、自动化程度的提高,供电容量的增大,对矿用隔爆型馈电开关的可靠性和安全性要求越来越高。
虽然传统的电磁式继电器在一定程度上也能够满足井下电网保护的需要,但是随着微处理器技术、信号处理算法以及人机接口等方面取得的重大进步,使得将各种保护功能集成到一个数字式的继电保护单元成为可能。
这种由数字式的继电保护单元组成的微机保护装置具有参数测量、事件报告、故障数据记录以及自检等功能。
1 LPC2292处理器的主要特点LPC2292是基于一个支持实时仿真和跟踪的16/32位ARM7TDMI-S IP核的微控制器,片内集成了256 KB的高速F1ash存储器和16 KB的静态RAM。
128位宽度的存储器接口和独特的加速结构使32位代码能够在最高时钟速率下运行。
此外,LPC2292处理器还具有很多其他特性,使得它非常适用于工业控制:◇外部8、16或32位总线;◇片内B00t装载程序实现ISP和IAP,为数据存储和固件升级带来了极大的灵活性;◇2个互连的CAN接口,带有先进的验收滤波器;◇2个32位定时器(带4路捕获和4路比较通道)、PWM单元(6路输出)、实时时钟和看门狗;◇多个串行接口,包括2个16C550工业标准UART、高速I2C接口(400 kHz)和2个SPI接口;◇向量中断控制器,可配置优先级和向量地址;◇多达112个通用I/O口(可承受5V电压),12个独立外部中断引脚(EIN和CAP功能);◇空闲和掉电2种低功耗模式;◇通过片内PLL可以实现最高为60 MHz的CPU工作频率。
基于ARM处理器的煤矿馈电开关保护装置设计

所属西铭煤矿、中煤五建第三十一工程处所属王家 岭煤矿、永煤集团所属城郊煤矿等矿井使用。根据 用户反馈的使用信息,混合型湿式混凝土喷射机组 可满足我国矿井下的湿喷要求。当然,用户可根据 现场实际情况,选择合适的方法来解决矿井下湿式 喷射混凝土存在的喷射距离近不利于施工及混凝土 的搅拌等问题。 参考文献:
^C/OS—IIRTOS:
该保护装置采用的是RS-485通信模式,通信电 路采用MAX485芯片,该芯片内部包含驱动器和接 收器,除了满足高通信要求外,还具备较强的抗干扰 能力。考虑到保护装置的防爆性能,在通信模块设 计时加入了光耦隔离元件PC817、6N137和高压隔 离变换器B0505,同时设计整流桥来保证输出信号 的稳定性。 2.3信号预处理模块 井下电网信号主要来自于采样电阻和互感器, 往往难以满足A/D转换器的要求,因此必须对其进 行预处理使其符合芯片的要求。考虑到在合闸和分 开时总开关处只需分别检测绝缘电阻和零序信号, 设计采用继电器控制绝缘电阻检测回路的通断。零 序电压由该零序电压变压器所取得,是40 V的交流 信号,并由UO接入采样电路,为了满足系统不同等 级电压需求,对其进行降压处理。零序电流由零序 电流互感器所得,并使之从IO处接人电路,同时设 计采用P007构成的微分电路进行相位补偿以满足 互感器感应电流在相位上的滞后,零序电流经转换 成为电压信号,并经过LM324放大电气隔离,成为
4 [2]
统 初 始 化
母什
启 动 操 作 系 统 的 硬 件 定 时 器 中 断
各 任 务 按 照 优 先 级 延 行
图4保护装置软件系统
电开关保护装置,可为矿井低压电网的安全可靠运 行提供有力保障。 参考文献:
[1]宋建成,翟生勤,范世民,等.矿井低压电网漏电保护技术的发 展[J].电网技术,2001,25(10):58.62. 王太续.煤矿供电设备电气保护技术的探讨[J].煤矿机电,
无刷直流电机的保护电路

无刷直流电机的保护电路作者:袁题训董升亮耿丙群, 韦统安来源:《现代电子技术》2011年第24期摘要:为了使无刷直流电机长期稳定运行,采用加保护电路的方法使其正常工作,保护电路主要由欠压保护、过流保护、短路保护等组成,在软件里设置电压、电流的阈值,直接对电压、电流进行检测并产生相应的保护,以免对电路和电机造成损害,并且做了相应的欠压、过压、过流测试实验。
实践应用表明,该设计的几种方案切实可行,能够在异常情况下及时对电机做出保护动作。
关键词:无刷直流电机;欠压保护;过压保护;过流保护中图分类号:TN919-34 文献标识码:A 文章编号:1004-373X(2011)24-0041-04Protective Circuit of Brushless DC MotorsYUAN Ti-xun, DONG Sheng-liang, GENG Bing-qun, WEI Tong-an(School of Information Science and Engineering, Ocean University of China, Qingdao 266100, China)Abstract: To make the brushless DC motor worked stably for a long time, the method of adding a protective circuit was adopted. The protective circuit is mainly made up of the under-voltage protection, over-current protection and short-circuit protection, etc. The voltage and current threshold values were set in the software to detect the voltage and current directly and generate the appropriate protection to avoid damaging the circuit and motor. The appropriate testing experiments of under-voltage, overvoltage and overcurrent were made as well. A practical application shows that several schemes of the design are feasible and can protect the brushless motors in abnormal condition timely.Keywords:brushless DC motor; under-voltage protection; overvoltage protection; overcurrent protection收稿日期:2011-07-13基金项目:国家“863”计划资助项目(2006AA09Z231)0 引言电机广泛应用于人们的生产、生活及科研等各个领域,因此各种类型的电机保护装置应运而生,如欠压保护、过压保护及过流保护等。
单片机在三相电机保护中的应用

作者: 李思政
作者机构: 江苏淮安信息职业技术学院通信工程系
出版物刊名: 科技资讯
页码: 254-255页
主题词: 三相电机 电动机保护器 缺相保护 过载保护 指令周期 模数转换器 相序保护 脉宽调制 外围接口 欠压
摘要:<正> 单片机是将 CPU、ROM、RAM、TIMER/COUNTER以及输入/输出接口(I/O)等集成在一块超大规模集成电路芯片上而制成的,有些单片机还集成了模数转换器(ADC)、脉宽调制模块(PWM)、通讯接口等,使用者只需用少量的外围电路就可组成各种应用系统。
单片机可分为8位机和16位机,其中8位机在市场中占主导地位。
生产单片机的半导体厂家很多,包括:INTEL,PHILIPS、SIEMENS、ADM、ATAIEL、MICROCHIP等。
近年来,MICROCHIP 公司生产的单片机以其简约的指令系统、纳秒级的指令周期、强大的外围接口功能深受电子工程师们的青睐,笔者曾使用过 PIC16CXXX 和 PIC16FXXX 系列的产品,觉得使用非常方便。
电动机保护器实现的功能主要包括:三相电流显示、声音报警、故障脱扣、故障记忆、过载保护、短路保护、漏电保护、缺相保护、相失衡保护、相序保护、过欠压保护等。
用传统的模拟。
IR21367在无刷直流电机控制中的应用
负 逻 辑 ,漏极 开路 输 出 I 逻 辑 功 能 的 使 能 端 / O
过 电 流 关 断 功 能 的模 拟 输 入 端 外接R C元 件 .确 定 故 障 清 除延 时 低侧 栅 极 驱 动 公 共 端 高侧 栅 极 驱 动 浮 地 电源
栅 极 驱 动 电 源 电 压 为 : 1~ 0 2 2 V; 可 欠 电压保 护 闭锁 所有 通道 ;
收 稿 日期 :01 — 9 0 2 00 —6
高侧 栅 极 驱 动 输 出
高侧 栅 极 驱 动 浮 地 电源 的 低 端
低 侧 栅 极 驱 动 输 出
W Wed c 2 1 . 电 子 元 器 件 焘 用 1 W .  ̄ n 0 11 c 9
第 1卷 3
第l 期
电手元 器 件 主 用
个 相互 独 立 的直 流 电源来 为其供 电 ,从 而使 系 统 的硬件 结 构 变得 复杂 ,可靠 性 下 降 。而 I 2 3 系 R 16
列 是 功 率 MO F T和 I B 专 用 栅 极 驱 动 集 成 电 SE G T 路 ,其 内 部 采 用 自举 技 术 ,可 使 功 率 驱 动 电 路 仅
过流 保护 功 能可关 闭全 部六 个输 出驱 动 ;
有三个 独 立 的半桥 驱 动 ;
所 有通 道 均可延 时 匹配 ;
可 防止交 叉导通 逻 辑 :
与33 .V的C MS S T 输 出逻 辑兼 容 ; O 或L T L
制:
㈣一 一
路 来 驱动 .则需6 驱 动 电路 ,这 样 至少 要 配备 4 个
吴 鹏 坤 . 关 振 宏
( 南 交 通 大 学 电 气 工 程 学 院 , 四 川 成 都 6 0 3 ) 西 10 1
浅谈ARMLPC2136在电动机保护装置上的实现
浅谈ARMLPC2136在电动机保护装置上的实现摘要:电动机保护器以ARMLPC2136芯片为主控核心,充分利用LPC2136强大的功能,以采样电流及采样电压为判据,对电动机是否异常和故障类别进行正确的判断和处理。
介绍该保护器总体设计方案、采用的保护逻辑、系统硬件电路的构成及特点,并给出软件工作流程。
此保护装置经反复试验后投入实际应用,取得了预期效果,具有良好的市场前景。
关键词:电动机保护器;LPC2136;故障检测中图分类号:TM307.3 文献标志码:A 文章编号:1000-8772(2009)14-0028-04 随着我国电力工业迅猛发展,电动机的使用几乎渗透到了各行各业,是工业、农业和国防建设及人民生活正常进行的重要保证。
因而确保电动机的正常运行就显得十分重要。
但是在实际使用过程中,由于电网、电动机本身质量及工作环境等多种因素,电动机会出现过压、欠压、电流不平衡、欠载及过流等故障,并由此带来了巨大的经济损失。
因此,智能型电动机保护装置的开发与研制势在必行。
目前多数电动机保护装置仍在使用8/16位的单片机,由于此类单片机大部分缺少SPI接口、I2C总线及A/D转换口等功能模块。
如果要进一步提高电动机保护装置的性能,则需要通过添加相应的芯片进行扩展。
这无形中增加了系统制造成本,降低了系统的可靠性,同时产品的体积将随着芯片的增加而增加。
与此相比,本文采用的ARM单片机由于采用了新型的32 位ARM核处理器,使其在指令系统、总线结构、调试技术、功耗以及性价比等方面远远超过了传统的8/16位单片机。
同时ARM单片机在芯片内部集成了大量的片内外设, 使其功能和可靠性大大提高。
一、系统功能特点本文设计的智能电动机保护器采用了飞利浦公司生产的嵌入式LPC2136芯片为主控核心。
LPC2136属于ARM7系列处理器,是一个支持实时仿真和跟踪的ARM7TDMI-S核微处理器,其体积小、功耗低,性价比高。
它使用了0.9MIPS/MHz的三级流水线结构,有效地提高了处理器的利用率;支持Thumb(16位)/ARM(32位)双指令集,能很好的兼容8位/16位器件。
基于ARM技术的新型低压电动机保护控制器设计

基于ARM技术的新型低压电动机保护控制器设计唐颖;李玉林【摘要】主要介绍基于ARM嵌入式处理器的一种新型低压电动机保护控制器的设计,采用ARM芯片LPC2136作为电动机的保护控制中心,在uC/OS操作系统下采集电动机的三相输入电压、电流信号,应用真有效值算法对电动机的状态实施监测,与设定保护内容做比较后,通过键盘和LCD显示器完成人机交互.该设计充分利用LPC2136内部硬件资源,有效防止电机损坏,具有完善的保护测控功能.【期刊名称】《电力系统保护与控制》【年(卷),期】2010(038)015【总页数】4页(P119-122)【关键词】电动机保护;保护整定;ARM;嵌入式系统;LPC2136【作者】唐颖;李玉林【作者单位】成都理工大学信息工程学院,四川,成都,610059;洛阳理工学院,河南,洛阳,471023【正文语种】中文【中图分类】TM7740 引言低压三相异步电机在企业、厂矿应用十分普遍,但因电网波动、传动、负载、环境等原因,电机往往会遇到低压、高压、过流、缺相、被堵转、启动时间过长、漏电等问题,如果不采取相应的保护措施,电机往往会被烧坏,导致本工序、下工序乃至整个生产线的停工,影响正常生产。
原有技术的保护装置主要是以机械、时间继电器保护为主,缺点主要是精度、灵活性差,安装复杂,有时甚至起不到保护作用,以单片机实现需要增加外围器件,且运算能力无法满足实时控制的要求。
比如电压取样式保护器虽然成本低,但是对低压电动机的过载断线等故障就无能为力。
还有电流取样式保护器,由于对取样电流进行分析时采用整流、滤波这样一种简单常规的电路,导致一旦发生断相的恰好是保护器的工作电源所在那一组,保护器就不会再工作了[1]。
为了实时对电机进行保护,近几年来各企业研发人员都在纷纷寻求新的替代方案。
目前ARM (Advanced RISC Machines)技术相对于单片机技术具有毋庸置疑的优点。
比如运算能力强,速度快,能真正实现实时保护;其次 ARM内部集成了AD/DA、I2C等功能模块,且I/O端口资源丰富,控制灵活[2]。
基于LPC2136单片机的光电编码仿真接口设计

基于LPC2136单片机的光电编码仿真接口设计郑均辉;甘泉【摘要】By orthogonal signal analysis of photoelectric encoder,hardware and software designs of the quadrature encoder are simulated at low speed by LPC2136 and UART communication technology to implement the digital display of precise posi⁃tioning of motor turning,which provides a good solution for encoder application in the field of low⁃speed automatic intelligent control. Testing result confirms that the design is very accurate in the count of the photoelectric encoder and count value of stan⁃dard measuring chronograph under conditions of low⁃speed rotation.%在低速状态下经LPC2136普通单片机利用UART通信技术,通过对光电编码器的正交信号分析,来模拟正交编码器的硬件设计与软件设计,实现对电机转向及精确定位的数字化显示,为编码器应用在低速的自动智能控制领域提供了一个很好的解决方案。
测试证实该设计对光电编码器的计数与标准记测器的计数值在低速旋转条件下非常准确。
【期刊名称】《现代电子技术》【年(卷),期】2015(000)010【总页数】3页(P42-44)【关键词】光电编码;LPC2136;接口设计;UART通信技术【作者】郑均辉;甘泉【作者单位】平顶山学院计算机科学与技术学院,河南平顶山 467002;平顶山学院计算机科学与技术学院,河南平顶山 467002【正文语种】中文【中图分类】TN710-34在工业控制精度要求相对较高的领域,比如发动机的转速测量控制等自动化控制应用中,通常需要用正交编码器对各种位移、速度、角度等进行精确测量[1]。
基于IR2136的无刷直流电机驱动电路的设计
基于IR2136的无刷直流机电驱动电路的设计之迟辟智美创作随着电力电子技术和高性能永磁资料的发展,无刷直流机电的应用在航空航天、医疗、家电及自动化领域获得了迅猛的发展.无刷机电驱动电路是数字控制电路和无刷直流机电联系的纽带,它采纳功率电子开关和霍尔位置传感器取代有刷机电中的电刷和换相器,接收来自数字电路的控制信号,将电流分配给无刷机电定子上的U、V、W三相绕组.相对数字控制部份,驱动电路是机电控制系统中的薄弱环节.因此,机电功率驱动模块电路性能的好坏将直接关系到系统的整体性能和可靠性.以IR公司的专用驱动功率芯片IR2136为中心,采纳MOSFET作为功率开关器件,完成了三相全桥逆变电路的设计,选用的MOSFET管为RFP2 60N.驱动电路接收机电输出的代表转子位置的3个霍尔信号HA、HB、HC,并接收经过隔离处置过的PWM波和控制机电转向的方向信号DIR,经过组合逻辑运算,输出按一定次第控制6个功率MOSFET导通与关断的信号.在MOSFET的应用中,驱动、呵护这两个问题必需全面考虑.文中详细介绍了功率驱动电路中驱动部份和呵护部份的设计,并在分析计算的基础上对电路的关键参数进行了选择.1 功率驱动电路采纳的驱动电路原理框图如图1所示,共包括4个部份:信号隔离部份、驱动部份、三相逆变桥部份及过流呵护部份.1.1 信号隔离部份机电控制信号PWM和DIR发生电路为数字电路,工作频率比力高,工作电压及电流都比力低.而功率驱动模块的电压和电流比力年夜,如果驱动模块的高压年夜电流串入前端控制数字电路,将会对数字控制电路造成干扰.为了保证DSP 可靠工作,必需实现弱信号的DSP硬件系统与年夜电流的功率放年夜电路之间进行隔离与匹配.本设计中采纳集成光耦HCPL2231模块,外围电路如图2所示,该模块由两通道自力光耦组成.光耦隔离实现了双方向传递信号,寄生反馈极小,传输信号带宽为6 MHz,完全可以满足需要传输的PWM 和DIR信号带宽要求.通过信号隔离,防止DSP的运行受到功率放年夜电路的干扰,提高了整个控制系统的可靠性.另外,通过光耦将隔离后的PWM和DIR信号提高至15 V,从而提高了控制信号抗干扰毛刺的能力.1.2 驱动部份驱动部份由组合逻辑电路和功率驱动电路组成.1.2.1 组合逻辑电路根据控制信号PWM和DIR方向信号,结合机电霍尔位置信号HA、HB、HC,以及过流信号OC,输出控制6个功率管开通与关断的控制信号.由于IR2136的高端桥臂和低端桥臂的控制信号为低电平有效,根据无刷机电换相逻辑真值表,生成逆变桥的6个功率管控制信号的逻辑关系如下:根据上述逻辑关系,逻辑综合电路采纳选用集成门电路实现,电路如图3所示.1.2.2 功率驱动电路在机电功率驱动电路中,三相逆变桥电路有6个功率开关器件,若每个功率开关器件都采纳自力的驱动电路驱动,则需要6个驱动电路,增加了电路的复杂性,可靠性下降.IR2136是功率MOSFET和IGBT专用栅极集成驱动电路,它可以驱开工作在母线电压高达600 V的功率开关器件.它带有3个自力的高压侧和高压侧输出通道,其内部采纳自举技术,仅需要一个直流电源,就可输出6路功率开关器件的驱动脉冲,仅需要一个直流电源,使其实现了对功率MOSFET 和IGBT的最优驱动,简化了整个驱动电路的设计.而且IR2136驱动芯片内置死区电路,以及过流呵护和欠压呵护等功能.IR2136的控制逻辑输入和CMOS、LSTTL电平兼容,同时输入带有噪声滤波器,使之有很好的噪声抑制能力.IR2136驱动一个半桥的电路如图4所示.其中,C1、VD分别为自举电容和二极管,Rg为栅极串连电阻.自举电容C1用来给高压侧的MOSFET提供悬浮电源.一个半桥的高压侧管在导通前需要先对自举电容C1充电,当C1两端电压超越阈值电压MOSFET的栅极开启电压,高压侧MOSFET导通.根据设计要求,自举电容必需能够提供功率管导通时所需要的栅极电荷.自举电容的最小设计要求一最小电荷要求为:其中Qg为功率管充沛导通时所需要的栅极电荷,V oc为悬浮电源绝对电压,Vf自举二极管的正向压降,Vl为高压侧功率管的压降.这里Qg=234 nC,V oc=15 V,Vf=1.3 V,Vl=0.7 V,C=1.08μF.这里选择C=1μF.自举二极管用于开关二极管的充放电过程.当高端IRFP260N管开启时,自举二极管必需接受着和IRFP260N漏极相同的电压,所以二极管的反向接受电压要年夜于母线电压.充放电恢复时间极短,应选用快恢复二极管,以减少自举电容向电源的回馈电荷.这里选用快恢复二极管FR107作为自举二极管.FR107的反向恢复时间小于500 ns,反向工作峰值电压1 000 V,正向峰值压降小于1.3 V,常温反向电流小于5μA,高温反向峰值电流小于100μA.采纳IR2136驱动三相逆变桥的六个功率MOSFET的电路原理图如图5所示.IR2136内置了400 ns的死区时间,防止同一桥臂的上下2个MOSF ET管同时导通.1.3 三相逆变桥部份逆变电路的作用是将动力直流电源转换为可以驱动无刷机电运行的三相交流电U、V和W.通过在IRFP260的栅极串连一定电阻,改变MOSFET的开关速度.这里选择栅极串连一适当年夜小的电阻.另外,由于栅源之间的阻抗很高,因此漏源间电压的突变会通过极间电容耦合到栅极而发生过高的电压过冲.对正方向的过冲电压,会引起MOSFET误导通,招致桥臂直通.因此,为了适当降低栅极驱动电路的阻抗,可以在栅源间并联一年夜电阻.如图6所示.1.4 过流呵护部份过流呵护电路的作用是防止工作过程中机电呈现过电流时采用的平安办法,当驱动电路控制系统呈现过电流时,关闭三相逆变桥中的功率管.先对母线电流进行采样检测,经过精密采样电阻将母线电流信号转换为电压信号SAM,然后进行简单的滤波处置后输入到比力器中,与设定的基准值进行比力,发生过流信号OC,OC信号输出到组合逻辑电路中介入运算.当电流过年夜时时,OC信号为低电平,三相逆变桥的高压端MOSFET关闭,机电停止工作.本设计中采纳LM339芯片实现电路过流呵护功能,过流呵护电路如图7所示.2 仿真结果分析直接调用驱动芯片IR2136、IRFP260的PSPSICE仿真模型,利用Synopsys公司的仿真分析软件Saber对功率驱动电路建立仿真分析模型进行分析.在仿真模型中,选择栅极串连电阻RG=200 Ω,栅源极并联电阻RGS=20 kΩ,直流母线电流精密采样电阻RSAM=0.05Ω.其中S1F和S4F为IR2136一个桥臂的输入控制信号,G1_G,G4_G分别为半桥高压侧MOSFET、高压侧MOSFET 的栅极电压,UA为机电的三相绕组输入电压.分析得出IR2136输入控制信号有效时,MOSFET可靠导通;同时高端MOSFET导通时,低端MOSFET关闭.3 结论文中设计完成了一个基于IR2136的无刷直流机电的功率驱动电路.该电路集成了输入欠压、防直通、过流等呵护功能.另外,利用IR21 36片内自举功能,实现了全桥驱动电路的单一电源供电,并根据计算分析对电路的关键参数进行选择.同时利用仿真分析软件Saber对设计电路进行了仿真,其仿真结果与理论分析相吻合.本文来源:转载需注明出处。
基于LPC2136的嵌入式实时机器人控制系统

基于LPC2136的嵌入式实时机器人控制系统
邱铁;司伟生
【期刊名称】《机械与电子》
【年(卷),期】2007(000)007
【摘要】以支持实时仿真和嵌入式跟踪的32位ARM7处理器LPC2136为控制核心,设计开发了轮式机器人控制系统硬件平台,通过ISP对系统中的Flash ROM 进行在线编程,采用PWM的方式对用于驱动双轮的直流电动机和用于转向的舵机进行速度和方向控制.在此硬件平台下移植了嵌入式实时操作系统μC/OS-Ⅱ,依据各个控制功能和微控制器的资源结构对任务进行划分,根据传感器反馈信号对机器人实时控制.
【总页数】4页(P46-49)
【作者】邱铁;司伟生
【作者单位】大连理工大学软件学院,辽宁,大连,116621;大连理工大学软件学院,辽宁,大连,116621
【正文语种】中文
【中图分类】TP242
【相关文献】
1.基于μC/OS-III的工业机器人嵌入式实时控制系统∗ [J], 何明超;曹其新;冷春涛
2.微小型机器人嵌入式远程实时控制系统设计 [J], 张刚;布挺;焦文潭
3.基于嵌入式实时操作系统的寻线机器人设计 [J], 迟瑞娟;付兵;刘吉孟
4.基于嵌入式实时操作系统的类人足球机器人的设计 [J], 程南瑞;刘国栋
5.采摘机器人实时智能避障系统研究
—基于嵌入式ARM [J], 李虹飞;胡满红
因版权原因,仅展示原文概要,查看原文内容请购买。
基于LPC2136的智能电动执行器的人机接口设计

基于LPC2136的智能电动执行器的人机接口设计
慈兆会;孔令成;张志华
【期刊名称】《自动化与仪器仪表》
【年(卷),期】2009()5
【摘要】由于智能电动执行器的参数设置,非接触式操作和执行机构运行过程中各种状态显示的需要,设计了基于LPC2136的智能电动执行器的人机接口。
介绍了人机接口的组成并对其主要组成部分,包括红外遥控、液晶显示以及面板按钮的设计
等进行了比较详细的阐述。
分析了人机接口与主机的硬件电路连接和系统软件设计。
实验表明:该人机接口实现了智能电动执行器的非接触式操作,使参数设置更便捷,并能及时显示执行器的各种状态信息。
【总页数】4页(P82-85)
【关键词】人机接口;LPC;2136;红外遥控;液晶显示
【作者】慈兆会;孔令成;张志华
【作者单位】中科院合肥智能机械研究所;中国科学技术大学自动化系;常州机械电
子工程研究所
【正文语种】中文
【中图分类】TP872.22
【相关文献】
1.基于TMS320F2812的智能电动执行器控制系统设计 [J], 慈兆会;孔令成;方颖;
赵江海
2.基于CAN总线的智能电动执行器设计 [J], 王淑红;魏莹;秦雯
3.智能电动执行器的人机接口设计 [J], 张锋;潘俊民
4.基于CAN总线的智能电动执行器控制系统设计 [J], 王朝阳;高强;李洪祥;李栋;薛涛;李月凤
5.基于STC8的智能电动执行器控制系统设计 [J], 李洪祥;李俊芳;李栋;薛涛;高强因版权原因,仅展示原文概要,查看原文内容请购买。
基于ARM控制器LPC2214的微机继电保护装置的设计
基于ARM控制器LPC2214的微机继电保护装置的设计孙秀桂;张洪斌;刘佳佳
【期刊名称】《电子测量技术》
【年(卷),期】2009(0)9
【摘要】微机继电保护装置作为智能化的工业控制设备,取代传统的继电保护装置已成为一种必然趋势。
本文着眼于现阶段城网和农网改造中对低压配电网络的继电保护,探讨了基于ARM7系列的LPC2214的微机继电保护装置的系统设计方案,讨论了该装置的硬件系统结构以及采用源码组装技术及源码资源库管理技术对
μC/OS-Ⅱ嵌入式系统进行改进,给出了系统的软件流程。
该系统功能完善、运行可靠、实时性强,可维护性和可移植性高,充分体现了ARM技术应用于微机继电保护系统的优势。
【总页数】4页(P118-121)
【关键词】微机保护;ARM7;LPC2214;μC/OS-Ⅱ实时操作系统
【作者】孙秀桂;张洪斌;刘佳佳
【作者单位】大理学院,大理671003;大理供电局,大理671000
【正文语种】中文
【中图分类】TM77
【相关文献】
1.基于ARM处理器的微机继电保护装置数据采集系统 [J], 温阳东;黄璐
2.基于ARM控制器LPC2214的税控收款机系统的设计与实现 [J], 吴文渊
3.基于ARM控制器LPC2214的嵌入式系统研究与开发 [J], 张胜茂
4.基于ARM控制器LPC2214的嵌入式系统研究与开发 [J], 张胜茂
5.基于ARM控制器LPC2214的税控收款机系统的设计 [J], 吴文渊
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘要:电动机保护器以ARMLPC2136芯片为主控核心,充分利用LPC2136强大的功能,以采样电流及采样电压为判据,对电动机是否异常和故障类别进行正确的判断和处理。
介绍该保护器总体设计方案、采用的保护逻辑、系统硬件电路的构成及特点,并给出软件工作流程。
此保护装置经反复试验后投入实际应用,取得了预期效果,具有良好的市场前景。
关键词:电动机保护器;LPC2136;故障检测随着我国电力工业迅猛发展,电动机的使用几乎渗透到了各行各业,是工业、农业和国防建设及人民生活正常进行的重要保证。
因而确保电动机的正常运行就显得十分重要。
但是在实际使用过程中,由于电网、电动机本身质量及工作环境等多种因素,电动机会出现过压、欠压、电流不平衡、欠载及过流等故障,并由此带来了巨大的经济损失。
因此,智能型电动机保护装置的开发与研制势在必行。
目前多数电动机保护装置仍在使用8/16位的单片机,由于此类单片机大部分缺少SPI 接口、I2C总线及A/D转换口等功能模块。
如果要进一步提高电动机保护装置的性能,则需要通过添加相应的芯片进行扩展。
这无形中增加了系统制造成本,降低了系统的可靠性,同时产品的体积将随着芯片的增加而增加。
与此相比,本文采用的ARM单片机由于采用了新型的32 位ARM核处理器,使其在指令系统、总线结构、调试技术、功耗以及性价比等方面远远超过了传统的8/16位单片机。
同时ARM单片机在芯片内部集成了大量的片内外设, 使其功能和可靠性大大提高。
一、系统功能特点本文设计的智能电动机保护器采用了飞利浦公司生产的嵌入式LPC2136芯片为主控核心。
LPC2136属于ARM7系列处理器,是一个支持实时仿真和跟踪的ARM7TDMI-S核微处理器,其体积小、功耗低,性价比高。
它使用了0.9MIPS/MHz的三级流水线结构,有效地提高了处理器的利用率;支持Thumb(16位)/ARM(32位)双指令集,能很好的兼容8位/16位器件。
而Thumb超精简指令集可以在芯片性能基本不受影响的情况下,使程序代码减少30%。
加上其指令大部分在寄存器中执行, 从而进一步提高了系统运算速度。
同时其丰富的片上资源,可以很好得满足用户的使用要求。
正是由于本保护器使用了LPC2136芯片,使得本保护装置在完成传统保护功能的前提下,还具有以下特点:系统具有强大的数据处理能力,可以对电动机的电压和电流进行实时跟踪采样,快速计算出采样量的有效值。
并根据有效值和保护值比较结果,能迅速对电动机工作状态和故障类别进行正确的判断和区别处理。
极大地提高了电动机保护系统的可靠性、速动性。
先进的网络通讯功能。
系统支持MODBUS-RTU总线协议,具有RS-485远程通讯接口。
通过通讯接口可将保护器与上位机相连,既能实现各个保护单元的资源共享,又可以实现远程控制和集中控制,从而为电动机构筑了有效的保护测控网络。
二、硬件设计本系统采用模块化设计,主要分为六个部分:处理器LPC2136、信号采集模块、显示模块、通讯模块、控制模块和按键模块。
图1为电动机保护器硬件结构图。
(一)信号采集模块一方面,为了及时监控电动机的运行状况,需实时对电动机的电压和电流进行采样。
同时考虑到电动机多用于环境恶劣的现场,周围存在大量的干扰信号。
因此,本系统在保护器前端采用了抗干扰性能较强的互感器对电流和电压信号进行采集。
这样在不影响主回路的情况下即实现了强电与弱电的完全隔离,又进一步提高了系统的可靠性。
对电流信号,本保护器采用了穿芯式三相电流互感器进行采集。
电流互感器为定做产品,需根据所要保护的电动机额定功率的不同进行选择。
本装置所选用的互感器比值分别为6.3A:10mA,25A:10mA,100A:10mA,400A:10mA。
电流采样电路如图2所示。
其中Ia为电流互感器输出的二次电流值,+1.65V为基值电压,IaP为保护通道,IaM 为测量通道。
因LPC2136集成的A/D转换器电压工作范围为0-3.3V,所以必须对电流互感器输出的二次电流值进行一定的转换。
为此,系统采用+1.65V的基准电压并结合运放将其转换为0-3.3V之间的电压信号,然后再将其送至A/D通道。
B相电流、C相电流采样结构与上图相同。
对剩余电流的保护,本系统采用了两种方法。
一种方法是直接将三相电流互感器输出的二次电流值连接到系统内部运放,计算电流矢量和。
其结构如图3所示。
其中Ia、Ib、Ic 分别为电流互感器输出的二次电流值,运放则是作为加法器使用。
这种方法成本较低,但是准确性不高。
另一种方法是需外接一个剩余电流互感器,此种方法检测的电流灵敏度较高,它是保护器增选功能。
对电压信号,本保护器选用了电流型电压互感器对一路线电压进行采集。
其中+1.65V为基值电压,电流型电压互感器配比为1:1,原电流值为2mA,二次电流值为2mA。
信号经运放转换后送入LPC2136的AD通道。
基准电压选择的原因与电流采样相同。
(二)通讯模块本系统具有RS485物理接口,遵循国际标准的MODBUS通讯协议,可以实现遥控、遥测等功能。
通讯部分采用了周立功公司开发生产的通讯集成模块RSM3485CHT。
该模块内部集成电源隔离、电气隔离、RS-485收发器及总线保护器件于一身,具有很好的抗干扰性能。
LPC2136具有两个符合16C550工业标准的通用异步收发器接口,图中应用了P0.0管脚及P0.1管脚分别与RSM3485CHT模块的TXD及RXD相连。
模块的A管脚和B管脚分别与外部装置相连。
(三)按键模块按键模块分为参数设置键和复位键。
其中参数设置键由上翻、下翻、返回和确认四个键组成,通过这些按键可以进行面板菜单操作,实现参数设定。
复位键用于故障解除后的复位或者在紧急停车时使用。
图5为复位电路图。
智能保护器中,电动机数据如电动机型号、额定电压、额定电流、历史故障、从站地址、主站地址、识别号等,在断电的情况下应保持。
因此系统中采用了CAT1025芯片。
它将2K 位的串行E2PROM 和用于掉电保护的系统电源监控电路集于一体,具有I2C串行接口,支持串行总线协议。
其串行口SCL、SDA分别于LPC2136的P0.2、P0.3相连接。
同时,它还兼有复位功能,其RESET 管脚或者独立的复位输入管脚MR都可以用作手动按键复位输入。
本系统采用了手动复位。
三、保护逻辑条件本装置通过对电动机正序电流、负序电流、零序电流,及电压进行检测,使其与相应的设定值进行比较,根据比较结果对电动机实施保护动作。
系统具体保护逻辑条件如下:(一)电流速断保护对电动机严重短路故障包括相间短路和三相短路采用电流速断保护。
如果任一相电流大于速断电流定值至整定时间,保护就报警或动作。
其中,IΦmax为相电流最大值,Isd为速断电流定值,T1为速断时间定值。
(二)堵转保护电动机发生堵转时,电流呈上升趋势,且要求发生时间很短,为此本系统采用正序短时限保护。
当任一相电流大于堵转电流定值至整定时限,保护就报警或动作。
其中,IΦmax为相电流最大值,Idz为堵转电流定值,为堵转时间定值。
(三)过负荷保护主要防止由过负荷、不对称过负荷引起、定值断线等引起的电动机过热。
过负荷保护是在各种运行情况下,建立电动机发热模型,为电动机提供保护。
可根据正、负序电动机对电动机热效应的不同,采用正序和负序电流的等效电流来模拟电动机的发热效应其中,I1为负序电流,I2为正序电流,K1为正序电流发热序数,在起动时间内为0.5,起动结束后为1;K2为负序电流发热序数,一般取为6。
其中,T为过热保护动作时间,为电动机热积累常数,Ieq为热等效电流,Is为保护整定动作电流。
(四)负序反时限保护负序反时限保护主要针对各类非接地性不对称故障,包括断相、匝间短路、相间短路、转子开焊等。
其故障主要特征就是会出现较大的负序电流,负序电流在转子中产生2倍工频的电流,使转子发热大大增加,危及电动机的安全运行。
负序反时限保护具有和过负荷保护相似的特性,其运行时间-电流曲线数学模型其中T为动作时间,I2为负序电流,IS2为保护整定电流。
本装置采用两段式定时限负序电流保护作为电动机断相、定子绕组或引出线不对称相间短路、定子绕组匝间短路的主保护:第一段具有高整定值I21(负序电流Ⅰ段电流定值),短延时T21(负序电流I段时间定值)。
第二段具有低定值(负序电流Ⅱ段电流定值),长延时T22(负序时间n段时间定值)。
其动作条件为:,且(五)起动时间过长保护电动机若正常起动,超过起动时间后电动机的电流将在额定值附近,低于电流整定值,则起动过长保护自动退出。
如果超过起动整定时间,电动机电流仍在电流整定值以上,则启动时间过长保护跳闸。
其中,IΦmax为相电流最大值,I4为起动时间过长电流整定值,T3为起动时间整定值。
(六)接地保护针对各种接地故障。
电动机接地故障取决于供电系统接地方式。
对于中性点不接地的系统,故障电流较小;中性点直接接地的系统中,故障电流数值将很大。
本系统接地保护主要针对后者。
其中I0为零序电流,I0dz为保护电流整定值,T0为接地保护动作时间。
(七)过压及欠压保护过压保护动作条件:其中Uy1为过压保护定值。
欠压保护动作条件:其中Uy2为欠压保护定值。
四、软件设计软件部分的设计主要采用C语言,在ADS1.2编译环境中进行,结构简洁紧凑,程序执行效率高,大幅度缩短开发时间,方便升级和移植。
其主程序较简单,主要由装置状态和按键状态循环程序构成。
系统初始化后,通过装置状态标志位判断装置是否发生变化。
如果发生变化就启动相应保护动作子程序,然后再进入按键判断循环;如果装置状态标志位没有发生变化,则直接进入按键判断循环。
此时若系统检测有按键按下,就进入按键处理子程序,并进行相应操作。
主要完成定值读写、保护投退、模拟量上送、接收或发送与面板的通讯数据等多项功能。
同时,装置还具有与上位主站通讯功能,可完成对本装置各种调试、测试功能,实现无人值守。
五、结语本文介绍的智能电动机保护器,充分利用了LPC2136内部资源,其结构紧凑,功能强大,具有很高的性价比,搭配简单的外围电路就能对电动机进行较为全面的保护。
同时,本保护装置灵活性强,便于推广。
对于不同的电动机,系统只需采用不同的电流互感器,并在保护器中设定相应的负载功率即可。
本保护装置经过反复试验后投入到实际应用中,取得了预期效果,具有很好的市场应用价值。
参考文献:[1] 周立功.ARM微控制器基础与实战[M].北京:北京航空航天大学出版社,2003.[2] 高厚礼,程耕国.P87LPC768单片机在电动机保护器的应用[J].自动化与仪表,2003,(5):54-56.[3] 姚波,陆伟青.ARD2型智能电动机保护器[J].机床仪器,2008,(3):60-63.[4] 苏明,李永丽.基于数字信号处理器和单片机的外籍型电动机保护装置[J].电机与控制应用,2007,34(4):52-56.[5] 许明伟,李志鹏,郭文峰.ARM单片机技术特点及应用[J].林3木工设备,2007,35(12):38-40.。