指令总结表
指令总结表

弹出堆栈中8个数据依次存入(DI, SI,BP,SP,BX,DX,CX,AX)
PUST, SRC
DST SRC
CMPXCHG DST, SRC
将(DST)与(AC)相比较,若(DST)=(AC),将(SRC) (DST)
置ZF=1;若(DST) (AC),将(DST) (AC),置ZF=0
逻辑运算5个
ADD DST, SRC
(DST)←(DST)∧(SRC)
OR DST,SRC
NOT DST
XOR DST,SRC
TEST DST,SRC
移位指令
算术移位和逻辑移位
SAL DST,CNT
按照CNT规定的移位次数,对目的操作数DST进行左移,每移一次,最高位MSB移入CF,而最低位LSB补0。
标志传送指令
LAHF
(AH)←(FLAGS的低字节)
SAHF
(FLAGS的低字节)←(AH);AH中相应位(D7、D6、D4、D2、D0)的状态分别传送到标志寄存器FLAGS的对应位
输入输出指令
IN AL,DX;
用于I/O端口到CPU的数据输入操作。
OUT port,AX
用于CPU到I/O端口的数据输出操作
SHL DST,CNT
SAR DST,CNT
按照CNT规定的移位次数,对目的操作数DST进行右移,每移一次,最高位MSB(符号位)保持不变,最低位LSB移入CF
循环移位指令
ROL DST,CNT
目的操作数每向左移位一次,其最高位MSB移入最低位LSB,MSB同时也移入CF。
ROR DST,CNT
目的操作数每向右移位一次,其最低位LSB移入最高位MSB,LSB同时也移入CF。
指令知识点总结

指令知识点总结1. 什么是指令?指令是计算机硬件能够识别和执行的一种命令。
它是机器语言的一部分,用来告诉计算机执行何种操作,包括数据处理、条件判断、跳转等。
2. 指令的种类指令可以分为以下几类:数据传输指令、算术逻辑运算指令、控制转移指令、输入输出指令等。
3. 数据传输指令数据传输指令用来将数据从一个地方传输到另一个地方,包括寄存器之间的数据传输、内存与寄存器之间的数据传输等。
例如,MOV指令用来将数据从一个地方移到另一个地方。
4. 算术逻辑运算指令算术逻辑运算指令用来对数据进行算术运算和逻辑运算。
例如,ADD指令用来进行加法运算,AND指令用来进行逻辑与运算等。
5. 控制转移指令控制转移指令用来改变程序的执行顺序,包括无条件跳转和条件跳转。
例如,JMP指令用来无条件跳转到指定的地址,JZ指令用来在零标志位为1时跳转。
6. 输入输出指令输入输出指令用来和外部设备进行数据交换,包括从外部设备读取数据和向外部设备发送数据。
例如,IN指令用来从外部设备读取数据,OUT指令用来向外部设备发送数据。
7. 指令的执行过程指令的执行包括取指、译码、执行、访存和写回五个阶段。
取指阶段是从内存中读取指令,译码阶段是将指令翻译成对应的操作,执行阶段是执行具体的操作,访存阶段是访问内存或寄存器,写回阶段是将执行结果写入寄存器或内存。
8. 指令的格式指令一般由操作码、寄存器地址、立即数、内存地址等部分组成。
例如,MOV AX, BX表示将BX的值传送到AX中。
9. 指令的编码指令的编码是将指令的操作码和操作数编码成二进制形式,以便计算机能够识别和执行。
不同的指令会有不同的编码格式。
10. 指令的设计在设计指令时,需要考虑指令的功能、寻址方式、指令长度、指令流水线等因素,以提高指令的执行效率和灵活性。
11. 指令的优化为了提高指令的执行效率,可以进行指令的优化,包括指令调度、指令重排、数据预取等。
12. 指令的性能评估对于一条指令的性能可以通过延迟、吞吐量等指标进行评估,以便进行系统设计和性能优化。
S7200指令总结

(STRCK8)是数据则丢失;出栈时,数据从栈顶被取出,所有数据向上串行
一位,在栈底(STRCK8)中装入一个随
名称
说明
机数据。 当所有触点呈简单的串联、并联关系
STRCK0
第1级堆栈(栈顶)
时,可用前面介绍的逻辑指令。当所有触 点呈比较复杂的连接关系时就要用到堆栈
STRCK1 第2级堆栈
操作。因此,逻辑堆栈指令主要用来完成
I0.1
LD I0.1
R
Q0.0,2 Q0.0 Q0.1
5-1 置位、复位指令
六 堆栈指令
⒈ 堆栈的概念
PLC的堆栈是一组存取数据的临时存储单元,是由堆栈位存储器组成的串 联堆栈。逻辑堆栈的操作原则是“先进后出”、“后进先出”。进栈时,数据
串联堆栈。进栈时,数据由栈顶压入,堆栈中原数据行被串行下移一位,在栈底
主程序 子程序1
● ● ●
子程序m
中断程序1
● ● ●
中断程序n
程序结构图
主程序:主程序是程序的主体,每个项目都必须 有并只能有一个主程序。在主程序中可以调用子 程序和中断程序。主程序控制整个程序的执行, 每次CPU扫描都要执行一次主程序。
子程序:子程序是一个可选的指令集合,仅在被 其他程序调用时才执行。同一子程序可在不同的 地方被多次调用,使用子程序可以简化程序和减 少扫描时间。
MSB LSB
7
0
VB10
首字节地址 访问一个字
高有效
字节
MSB
15
87
第有效 字节
LSB
0
MW20
MW21
区域标识符
双字 V D 100 寻址:
MSB 31
VD100
Red Hat Enterprise Linux 常用命令总结

: q! à 不保存,强制退出
# vi 文件名 à 打开你要编辑的文件
: q à 不做任何操作,退出 vi 编辑器。
5、查看文件内容
# more <file> 查看文件的详细内容
-- # more file1 file2 ... 依次列出文件的内容
--- more 有分页的功能
who、w、whomami--------
id à
hostname à
# fdisk –l à 查看系统下的硬盘信息
-- # bzip2 -d file.bz2 <==解压缩文件
-- # bzip2 -9 -c file > file.bz2 <== 用最佳压缩比压缩,并保留原来的文件
tar
参数:
-c :建立一个压缩文件的参数指令(create 的意思);
-x :解开一个压缩文件的参数指令!
语法:命令 > 输出
示例:# ls > outputfile
3、2> 错误输出重定向
语法:命令 2> errofile
示例:# ls 2> outputfile
管道操作符 “|”:
语法:command1 | command2
示例:# ps -ef | grep tomcat à 查看当前是否启动了 tomcat 服务(像这样的组合使用十分常用。)
-f :使用档名,请留意,在 f 之后要立即接档名喔!不要再加参数!
例如使用『 tar -zcvfP tfile sfile』就是错误的写法,要写成
『 tar -zcvPf tfile sfile』才对喔!
数控车编程指令总结

数控车编程指令总结数控车编程指令总结G00:快速定位指令(绝对坐标与增量坐标可混用)G00X_Z_;G00U_W_;G00X_W_;G00U_Z_;1、与运动方式G01:直线插补指令,F是合成速度顺/逆时针圆弧插补(是沿垂直于圆弧所在平面的坐标轴的负G02/G03:相关的G方向看去,顺时针为G02,逆时针为G03。
)指令(R不能描述整圆,因为起终点相同的整圆有无数个。
I、J、K始终是圆心相对于起点的坐标。
劣弧R为正,优弧R为负。
G04:暂停功能,非模态2、坐标系相关的G指令G50数控系统控制刀具中心的运动轨迹,而由于刀具半径的存在,刀心与工件轮廓间存在一个偏移量,这个偏移量为刀补。
G40:解除刀具半径补偿3、与刀具G41:左偏刀具半径补偿G42:右偏刀具半径补偿逆着第三个坐标轴,沿着刀具前进方向观察,刀具偏在工件的左边(假定工件不动)为左刀补,否则为右刀补。
刀补建立和撤消(G40/G41/G42)只能采用G00或G01进行,4、与参考点相G28关的G指令:该指令使刀具自动返回机械原点或经过某一中间位置,再回到机械原点半径补偿有关的G指令数控车指令:5、与主轴转速G28X(U)_Z(W)_T00;控制相关的G指令G50(主轴最高转速设定)G97(直接设定主轴转数指令)(r/min)G96(设定主轴线速度恒定指令)(m/min)后面加G50G99_F_;(每转进给量指令)(mm/r)G98_F_;(每分钟进给量指令)(mm/min)6、与进给功能相G32关的G指令G76IP_F_;(螺纹切削进给速度)(mm/r)G92切削圆柱面G90X(U)_Z(W)_(F_);(1)外径、内径切削循环(G90)切削锥面G90X(U)_Z(W)_I_(F_);切削直端面G94X(U)_Z(W)_(F_);(2)端面切削循环指令(G94)切削锥度端面G94X(U)_Z(W)_K_(F_);单一固定循环指令(G90,G92,G94)圆柱螺纹G92X(U)_Z(W)_(F);(3)螺纹切削循环指令(G92)圆锥螺纹G92X(U)_Z(W)_R_(F);7、固定循环G指令(1)外径、内径粗加工切削循环(G71)G71U_R_;复合固定循环指G71P_Q_U_W_(F_S_T_);令(G70~G73)(2)端面粗加工循环指令(G72)G72W_R_;G72P_Q_U_W_;(3)闭合车削循环指令(G73)(4)精加工循环指令(G70)G70P_Q_;M00:程序指令(程序停止)1)M01:计划指令(选择停止)M02:程序结束(M30)(掌握)8、M(辅助功能指令)指令M03:主轴正转2)M04:主轴反转M05:主轴停转M19:主轴定向停止3)M08:冷却液开M09:冷却液关【非续效】扩展阅读:数控编程典型指令的应用与总结前言数控装置是数控机床的核心.它的主要功能是正确识别和解释数控加工程序,并对解释结果进行各种数据计算和逻辑判断处理,从而完成各种输入、输出任务.而数控装置的主要核心部分就是数控加工程序.数控加工程序是按数控中规定使用的指令代码、程序段格式和加工程序格式来编制的.因此,数控编程指令的核心中的核心.为了更好地对数控编程概念的全面认识,全面掌握数控机床的程序的编制方法、熟记数控编程指令在不同系统的编程差异,及其熟练地应用数控指令,我们必须对数控编程典型指令加以总结.一、数控编程的基础与基本编程功能的总结数控编程的基础①机床坐标系的建立数控车床欲对工件车削进行程序控制必须建立机床坐标系,数控车床的机床原点一般设在主轴前端面的中心,数控铣床每次通电之后,机床的三个坐标轴都要依次走到机床正方向的一个极限位置这个位置就是机床原点,是机床出场时设定的固定位置,通常在数控铣床上的机床原点和机床参考点是重合的.②工件坐标系的建立数控车床的工件原点一般设在主轴中心线与工件左端面或右端面的交点处,而建立工件坐标系使用G50功能,指令编程格式G50X~Z~式中X、Z的值是起刀点相对于加工原点的位置.G50和G92的使用方法基本相似在数控车床编程时,所有X坐标值均使用直径值,如下图所示。
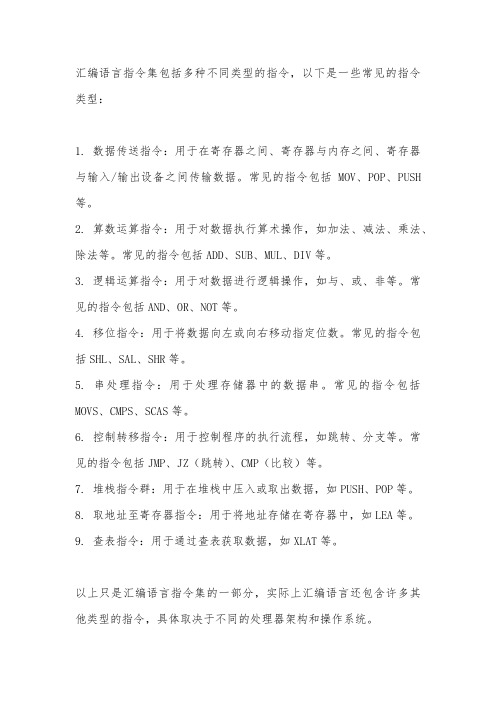
传送及比较指令总结
传送及比较指令总结传送指令是计算机系统中常用的一类指令,用于将数据从一个位置移动到另一个位置。
这些指令通常用于数据的复制、转移和重排等任务。
在本文中,我将总结一些常见的传送指令,并比较它们的异同。
1.MOV指令:MOV (Move) 指令用于将数据从一个位置复制到另一个位置。
它可以在寄存器之间、寄存器和内存之间、寄存器和端口之间进行数据的传送。
MOV 指令通常具有两个操作数,一个目标操作数和一个源操作数。
例如,`MOV AX, BX` 将寄存器 BX 中的值复制到寄存器 AX 中。
MOV 指令在大多数计算机体系结构中都是支持的,因为它是一种非常基本和常见的操作。
2.LDR和STR指令:LDR (Load) 和 STR (Store) 指令用于将数据从内存中加载到寄存器或将数据从寄存器存储到内存中。
这些指令主要在ARM架构中使用。
LDR指令将内存中的数据加载到寄存器中,例如,`LDR R0, [R1]` 将 R1 寄存器中的地址所对应的内存单元中的数据加载到 R0 寄存器中。
STR 指令则将寄存器中的数据存储到内存中,例如,`STR R0, [R1]` 将 R0 寄存器中的数据存储到 R1 寄存器中的地址所对应的内存单元中。
3.PUSH和POP指令:PUSH指令用于将数据压入栈中,而POP指令用于从栈中弹出数据。
这两个指令通常用于实现函数调用和中断处理等操作。
PUSH指令将数据放入栈顶,然后栈指针下移;而POP指令则将栈顶数据读取到寄存器中,并将栈指针上移。
例如,`PUSHAX`将AX寄存器中的数据压入栈中,`POPAX`将栈顶数据弹出到AX寄存器中。
4.XCHG指令:XCHG (Exchange) 指令用于交换两个操作数的值。
这个指令可以用于两个寄存器之间的值交换,或者寄存器和内存之间的交换。
例如,`XCHG AX, BX` 将寄存器 AX 和 BX 中的数据进行交换。
XCHG 指令常用于实现数据交换、排序和互斥访问等场景。
微机原理指令总结
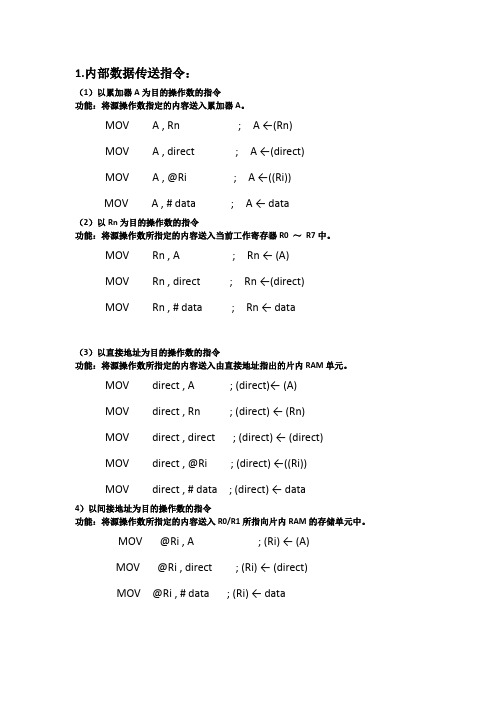
1.内部数据传送指令:(1)以累加器A为目的操作数的指令功能:将源操作数指定的内容送入累加器A。
MOV A , Rn ; A ←(Rn)MOV A , direct ; A ←(direct)MOV A , @Ri ; A ←((Ri))MOV A , # data ; A ← data(2)以Rn为目的操作数的指令功能:将源操作数所指定的内容送入当前工作寄存器R0 ~R7中。
MOV Rn , A ; Rn ← (A)MOV Rn , direct ; Rn ←(direct)MOV Rn , # data ; Rn ← data(3)以直接地址为目的操作数的指令功能:将源操作数所指定的内容送入由直接地址指出的片内RAM单元。
MOV direct , A ; (direct)← (A)MOV direct , Rn ; (direct) ← (Rn)MOV direct , direct ; (direct) ← (direct)MOV direct , @Ri ; (direct) ←((Ri))MOV direct , # data ; (direct) ← data4)以间接地址为目的操作数的指令功能:将源操作数所指定的内容送入R0/R1所指向片内RAM的存储单元中。
MOV @Ri , A ; (Ri) ← (A)MOV @Ri , direct ; (Ri) ← (direct)MOV @Ri , # data ; (Ri) ← data(5)16位数据传送指令唯一的一条16位立即数传送指令。
功能:将16位二进制的立即数送入数据指针DPTR中。
其中高8位送入DPH,低8位送入DPL。
MOV DPTR , # data162.外部数据传送指令MOVX A,@RiMOVX A,@DPTRMOVX @Ri,AMOVX @DPTR,A3.堆栈操作指令压栈指令:将direct中的内容送入堆栈中PUSH direct ;SP←(SP)+1,(SP)←(direct)出栈指令:将堆栈中的内容送回到direct中POP direct ; (direct) ← (SP), SP←(SP)-14.查表指令MOVC A,@A+DPTR;A←((A)+(DPTR))MOVC A,@A+PC ;PC ← (PC)+1, A←((A)+(PC))5.交换指令XCH A,Rn ;(A)←→(Rn)XCH A,direct ;(A)←→(direct)XCH A,@Ri ;(A)←→((Ri))XCHD A,@Ri ;(A0~3)←→((Ri)0~3)SWAP A ;(A0~3)←→(A4~7)6.逻辑操作类指令:逻辑“与”指令ANL逻辑“或”指令ORL逻辑“异或”指令XRL累加器A的清零和取反CLR CPL7.控制转移类指令长转移指令LJMP 标号绝对转移指令AJMP 标号短(相对)转移指令SJMP 标号间接转移指令JMP @A+DPTR8.累加器A的移位指令循环左移RL A ;循环右移RR A ;带进位位循环左移RLC A ;带进位位循环右移RRC A9.条件转移指令累加器判零转移指令JZ 标号JNZ 标号比较不等转移指令CJNE A, #data, 标号CJNE A, direct, 标号CJNE Rn, #data,标号CJNE @Ri, #data,标号减1不为零(循环)转移指令DJNZ Rn,标号DJNZ direct, 标号。
51单片机汇编指令总结

51单片机汇编指令总结数据传输指令一.片内RAM数据传输指令1.以累加器A为目的操作数的指令:MOV A , RnMOV A , directMOV A , @RiMOV A , #data2.以寄存器Rn为目的操作数的指令:MOV Rn , AMOV Rn ,directMOV Rn ,data3.以直接地址为目的操作数的指令:MOV direct ,AMOV direct ,RnMOV direct1 ,derect2MOV direct ,@RiMOV direct ,#data4.间接地址为目的操作数的指令:MOV @Ri ,AMOV @Ri ,directMOV @Ri ,#data5.十六位数据传送指令:MOV DPTR , #data16二.累加器A与片外RAM数据传送指令:MOVX A ,@RiMOVX A , @DPTRMOVX @Ri ,AMOVX @DPTR ,A三.查表寻址:MOVC A ,@A+DPTR (先PC←(PC)+1,后A←((A)+(DPTR)))+MOVC A ,@A+PC (先PC←(PC)+1,后A←((A)+(PC)))四.交换指令:1.字节交换指令:XCH A ,RnXCH A ,directXCH A ,@Ri2.半字节交换指令:XCHD A ,@Ri3.累加器半字节交换指令:SWAP A五.栈操作指令:1.PUSH(入栈指令)PUSH direct2.POP(出栈指令)POP direct算术运算指令:一.加法减法指令:1.加法指令:ADD A ,RnADD A ,directADD A ,@RiADD A ,#data2.带进位加法指令:ADDC A ,Rn A←(A)+(Rn)+CYADDC A ,direct A←(A)+(direct)+CYADDC A ,@Ri A←(A)+((Ri))+CYADDC A ,#data A←(A)+(data)+CY3.带借位减法指令:SUBB A ,Rn A←(A)-CY-(Rn)SUBB A ,direct A←(A)-CY-(direct)SUBB A ,@Ri A←(A)-CY-((Ri))SUBB A ,#data A←(A)-CY-#data二.乘法除法指令:1.乘法指令:MUL AB BA←(A) ×(B)高字节放在B中,低字节放在A中2.除法指令:DIV AB A←(A) ÷(B)的商,(B) ←(A) ÷(B)的余数三.加1减1指令:1.加1指令:INC A A←(A)+1INC Rn Rn←(Rn)+1INC direct direct←(direct)+1INC @Ri (Ri) ←((Ri))+1INC DPTR DPTR←(DPTR)+12.减1指令:DEC ADEC RnDEC directDEC @Ri四.十进制调制指令:DA A 调整累加器A的内容为BCD码逻辑操作指令:一.逻辑与、或、异或指令:1.逻辑与指令:ANL A ,RnANL A ,directANL A ,@RiANL A ,#data2.逻辑或这令:ORL A ,RnORL A ,directORL A ,@RiORL A ,#dataORL direct ,AORL direct ,#data3.逻辑异或指令:XRL A ,RnXRL A ,directXRL A ,@RiXRL A ,#dataXRL direct ,AXRL direct ,#data二.清零、取反指令:1.累加器A清零指令:CRL A2.累加器A取反指令:CPL A三.循环位移指令:1.累加器A循环左移指令:RL A2.累加器A循环右移指令:RR A3.累加器A连同进位位循环左移指令:RLC A4. 累加器A连同进位位循环右移指令:RRC A控制转移指令:一.无条件转移指令:1.绝对转移指令:AJMP addr11 (先PC+2,然后将addr11的低十位传给PC,PC的高六位不变)2.长转移指令:LJMP addr16 (用addr16的值替换PC的值)3.相对转移(短转移)指令:SJMP rel(带符号的偏移字节数)(PC+2,再加rel赋值给PC)4.间接转移指令:JMP @A+DPTR (A)+(DPTR) →(PC)二.条件转移指令:1.累加器判零转移指令:JZ rel 先PC+2;后判断,A为0时转移,PC+rel赋值给PC;否则顺序执行JNZ rel 先PC+2,后判断,A不为0时转移,PC+rel赋值给PC;否则顺序执行2.比较转移指令:CJNE 目的操作数,源操作数,relCJNE A,direct,rel 先PC+3传回PC,再比较目的操作数和原操作数CJNE A,#data,rel 目>源时,程序转移,PC+rel传回PC且CY=0CJNE Rn,#data,rel 目=源时,程序顺序执行CJNE @Ri,#data,rel 目<源时,程序转移,PC+rel传回PC且CY=13.减一非0指令:DJNZ Rn,rel 先PC\+2,Rn-1,当Rn为0时程序顺序执行,否则PC+rel传回PCDJNZ direct,rel 先PC+3,direct-1,direct为0时程序顺序执行,否则PC+rel 传回PC二.子程序调用、返回指令:1.绝对调用指令ACALL:ACALL addr11 先PC+2,SP+1将PC的低八位存入SP;SP+1,将PC的高八位存入SP。
循环切削指令总结

图 外径、内径粗车循环指令G71
2.端面粗车循环指令G72 (1)功能: 该指令的执行 过程除了其切削进程平 行于X轴之外,其他与 G71相同,如图所示。 (2)格式:G72W d Re G72 Pns Qnf Uu Ww F S T
图 端面粗车循环指令G72
3、成型车削循环G73 (1)功能:该指令只须指定 精加工路线,系统会自动 给出粗加工路线,适于车 削铸造、锻造类毛坯或半 成品,如图所示。 (2)格式: G73 Ui Wk Rd G73 Pns Qnf Uu Ww F S T
常用循环指令总结
(一) 单一固定循环
1.内径、外径车削循环指令G90 功能:适用于在零件的内、外圆柱面(圆锥面)上毛坯余量较大或 直接从棒料车削零件时进行精车前的粗车,以去除大部分毛坯余量。 (1)直线车削循环 格式:G90 X(U) Z(W) F
其轨迹如图所示,由4个步骤组成。
Z D 3(F ) C
W 4( R) 2(F ) 1( R ) A B Z
图 内径、外径车削循环指令G90
X
(2)锥体车削循环 格式:G90 X(U) Z (W) R F 其轨迹如图 所示,刀 具从定位点A开始沿 ABCDA的方向运动,图
D
4(R)
A 1 B Z
3(F) C 2(F) Z W
中B点的X坐标比C点的 X坐标小,所以R应取负 值。
四、课堂小结
通过本次课的教学,学生必须掌握 G90、G94、G70、G71、G72、G73 等指 令,通过实训后,再加工中能熟练运行 G90、G94、G70、G71、G72、G73等指令。
锥体车削循环指令G90
2、 端面车削循环
(1)端面车削循环 格式:G94 X(U) Z(W) F 其轨迹如图所示,由4个步骤组成。刀具从循环起点开始沿,其中X (U)、Z(W)给出终点的位置。图中1(R)表示第一步是快速运动, 2(F)表示第二步按进给速度切削,其余3(F)、4(R)的意义相似。 (2)带锥度的端面车削循环 格式:G94 X(U) Z(W) R F 其轨迹如图所示,刀具从循环起点开始,其中X(U)、Z(W)给出终 点的位置,R值的正负由B点和C点的X坐标之间的关系确定,图中B点 的X坐标比C点的X坐标小,所以R应取负值。
常用的准备功能指令总结

CNC
第二章
数控加工程序编制基础
CNC
第二章
数控加工程序编制基础
习题:综合运用G01、G02、G03等基本指令按照下图编写程序(路径 O-A-B-C-D-E-F-G-O)
CNC
第二章
数控加工程序编制基础
三、刀具补偿指令
刀具半径补偿的目的:
在数控铣床上进行轮廓的铣削加工时,由于刀具半径的存在,刀具 中心轨迹和工件轮廓不重合。如果系统没有半径补偿功能,则只能按刀 心轨迹进行编程,即在编程时事先加上或减去刀具半径,其计算相当复 杂,计算量大,尤其当刀具磨损、重磨或换新刀后,刀具半径发生变化 时,必须从新计算刀心轨迹,修改程序,这样既繁琐,又不利于保证加 工精度。当数控系统具备刀具半径补偿功能时,数控编程只需按工件轮 廓进行,数控系统会自动计算刀心轨迹,使刀具偏离工件轮廓一个刀具 半径值,即进行刀具半径补偿。
CNC
第二章
数控加工程序编制基础
• G00指令是模态代码,直到指定了G01、G02和G03 中的任一指令,G00才无效。 • 进给速度指令对G00无效
CNC
第二章
数控加工程序编制基础
2.直线插补指令-G01 • 该指令使机床各坐标轴以插补联动方式在各坐 标平面内,按指定的进给速度F切削任意斜率 的直线轮廓和用直线段逼近的曲线轮廓。 • 指令格式为: G01 X_ Y_ Z_ F_ ; 其中:X、Y、Z的值是直线插补的终点坐标值。
数控加工程序编制基础
3、圆弧插补指令-G02/G03
• G02为顺时针圆弧插补,G03为逆时针圆弧插补。 • 判断顺、逆方向的方法为:沿垂直于圆弧所在平面的坐标轴 的正向往负方向看,刀具相对于工件的转动方向是顺时针方 向为G02,逆时针方向为G03,如图所示。
DSP汇编指令总结
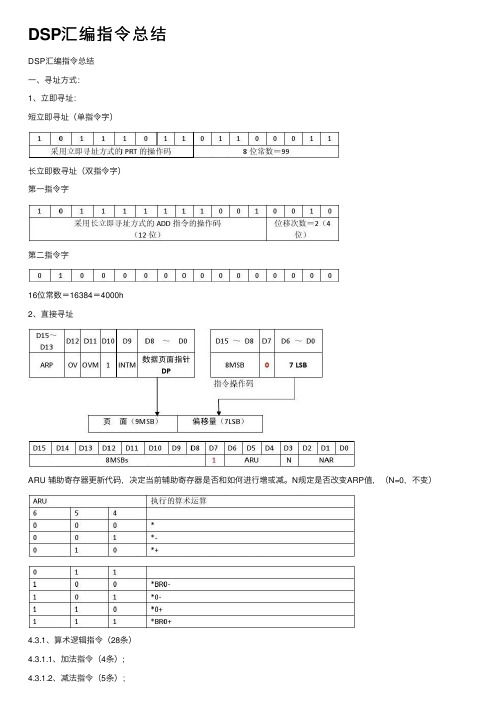
DSP汇编指令总结DSP汇编指令总结⼀、寻址⽅式:1、⽴即寻址:短⽴即寻址(单指令字)长⽴即数寻址(双指令字)第⼀指令字第⼆指令字16位常数=16384=4000h2、直接寻址ARU 辅助寄存器更新代码,决定当前辅助寄存器是否和如何进⾏增或减。
N规定是否改变ARP值,(N=0,不变)4.3.1、算术逻辑指令(28条)4.3.1.1、加法指令(4条);4.3.1.2、减法指令(5条);4.3.1.3、乘法指令(2条);4.3.1.4、乘加与乘减指令(6条);4.3.1.5、其它算数指令(3条);4.3.1.6、移位和循环移位指令(4条);4.3.1.7、逻辑运算指令(4条);4.3.2、寄存器操作指令(35条)4.3.2.1、累加器操作指令(6条)4.3.2.2、临时寄存器指令(5条)4.3.2.3、乘积寄存器指令(6条)4.3.2.4、辅助寄存器指令(5条)4.3.2.5、状态寄存器指令(9条)4.3.2.6、堆栈操作指令(4条)4.3.3、存储器与I/O操作指令(8条)4.3.3.1、数据移动指令(4条)4.3.3.2、程序存储器读写指令(2条)4.3.3.3、I/O操作指令(2条)4.3.4、程序控制指令(15条)4.3.4.1、程序分⽀或调⽤指令(7条)4.3.4.2、中断指令(3条)4.3.4.3、返回指令(2条)4.3.4.4、其它控制指令(3条)4.3.1、算术逻辑指令(28条)4.3.1.1、加法指令(4条);▲ADD▲ADDC(带进位加法指令)▲ADDS(抑制符号扩展加法指令)▲ADDT(移位次数由TREG指定的加法指令)4.3.1.2、减法指令(5条);★SUB(带移位的减法指令)★SUBB(带借位的减法指令)★SUBC(条件减法指令)★SUBS(减法指令)★SUBT(带移位的减法指令,TREG决定移位次数)4.3.1.3、乘法指令(2条);★MPY(带符号乘法指令)★MPYU(⽆符号乘法指令)4.3.1.4、乘加与乘减指令(6条);★MAC(累加前次积并乘)(字数2,周期3)★MAC(累加前次积并乘)★MPYA(累加-乘指令)★MPYS(减-乘指令)★SQRA(累加平⽅值指令)★SQRS(累减并平⽅指令)4.3.1.5、其它算数指令(3条);★ABS(累加器取绝对值指令)★NEG(累加器取补码指令)★NORM(累加器规格化指令)返回4.3.1.6、移位和循环移位指令(4条);▲ SFL(累加器内容左移指令)▲ SFR(累加器内容右移指令)▲ROL(累加器内容循环左移指令)▲ROR(累加器内容循环右移指令)返回4.3.1.7、逻辑运算指令(4条);▲ AND(逻辑与指令)▲ OR(逻辑或指令)▲ XOR(逻辑异或指令)▲ CMPL(累加器取反指令)返回4.3.2、寄存器操作指令(35条)4.3.2.1、累加器操作指令(6条)▲ LACC(装载累加器指令)▲ LACT(装载累加器)*按TREG低4位指定的次数移位▲ LACL(装载累加器低16位指令)▲ ZALR(装载累加器指令)▲ SACL(移位并存储累加器低半部)▲ SACH(移位并存储累加器⾼半部)返回4.3.2.2、临时寄存器指令(5条)▲ LT(装载TREG指令)▲ LTA(装载TREG并累加上次乘积指令)▲ LTS (装载TREG并减去上次乘积指令)▲ LTD(装载TREG并累加上次乘积及数据移动指令)▲LTP(装载TREG和累加器指令)返回4.3.2.3、乘积寄存器指令(6条)▲ PAC (乘积寄存器内容载⼊累加器)▲ APAC (PREG与累加器相加)▲ SPAC(累加器和乘积寄存器相减)▲ LPH(装载PREG⾼16位指令)▲ SPL(存储PREG低16位指令)▲ SPH(存储PREG⾼16位指令)返回4.3.2.4、辅助寄存器指令(5条)★LAR(装载当前辅助寄存器AR)★SAR(存储辅助寄存器指令)★MAR(修改当前辅助寄存器)★SBRK(从当前辅助寄存器减去短⽴即数)返回4.3.2.5、状态寄存器指令(9条)★LST(装载状态寄存器)★SST(存储状态寄存器)★SETC(控制位置“1”指令)★SETC(控制位置“1”指令)★LDP(装载数据指针DP指令)★BIT(位测试指令)★BITT(测试由TREG指定bit code指令)★CMPR(⽐较当前辅助寄存器AR和AR0)返回4.3.2.6、堆栈操作指令(4条)★PUSH(累加器低16位进栈指令)★POP(栈顶内容弹出⾄累加器低16位指令)★POP(栈顶内容弹出⾄累加器低16位指令)★POPD(弹栈⾄数据存储器指令)返回4.3.3、存储器与I/O操作指令(8条)4.3.3.1、数据移动指令(4条)▲DMOV(数据存储器内部数据移动指令)▲SPLK(存储长⽴即数⾄数据存储器指令)▲BLDD(数据存储器内部的数据块移动)▲ BLPD(从程序存储器到数据存储器的数据块传送)4.3.3.2、程序存储器读写指令(2条)★TBLR(读程序存储器数据到数据存储器)★TBLW(写程序存储器)4.3.3.3、I/O操作指令(2条)★IN(数据输⼊指令)★OUT(数据输出指令)4.3.4、程序控制指令(15条)4.3.4.1、程序分⽀或调⽤指令(7条)★B(⽆条件转移指令)★BANZ(辅助寄存器内容不等于零转移)★CALL(⽆条件⼦程序调⽤指令)★BACC(按累加器内容转移指令)★CALA(由累加器指定地址的⼦程序调⽤指令)★CC(条件调⽤指令)4.3.4.2、中断指令(3条)★INTR(软中断指令)★TRAP(软件陷阱中断)★NMI(⾮屏蔽中断)4.3.4.3、返回指令(2条)★RET(⽆条件从⼦程序或中断返回)★RETC(条件返回指令)4.3.4.4、其它控制指令(3条)★RPT(重复执⾏下条指令)★NOP(空操作)★IDEL(暂停)返回。
汇编语言指令集
汇编语言指令集包括多种不同类型的指令,以下是一些常见的指令类型:
1. 数据传送指令:用于在寄存器之间、寄存器与内存之间、寄存器与输入/输出设备之间传输数据。
常见的指令包括MOV、POP、PUSH 等。
2. 算数运算指令:用于对数据执行算术操作,如加法、减法、乘法、除法等。
常见的指令包括ADD、SUB、MUL、DIV等。
3. 逻辑运算指令:用于对数据进行逻辑操作,如与、或、非等。
常见的指令包括AND、OR、NOT等。
4. 移位指令:用于将数据向左或向右移动指定位数。
常见的指令包括SHL、SAL、SHR等。
5. 串处理指令:用于处理存储器中的数据串。
常见的指令包括MOVS、CMPS、SCAS等。
6. 控制转移指令:用于控制程序的执行流程,如跳转、分支等。
常见的指令包括JMP、JZ(跳转)、CMP(比较)等。
7. 堆栈指令群:用于在堆栈中压入或取出数据,如PUSH、POP等。
8. 取地址至寄存器指令:用于将地址存储在寄存器中,如LEA等。
9. 查表指令:用于通过查表获取数据,如XLAT等。
以上只是汇编语言指令集的一部分,实际上汇编语言还包含许多其他类型的指令,具体取决于不同的处理器架构和操作系统。
凯恩帝循环指令总结

K2000M/M8铣床/加工中心用数控系统
功能指令地址符说明及参数设定
高速深孔G73X/Y/Z/R/Q/F Q为进刀量/抬刀量参数P3310
返攻丝G74X/Y/Z/R/P/F P为孔底反转改正转的暂停时间
精镗G76X/Y/Z/R/P/Q/F P为孔底/台阶孔暂停时间Q为偏移量
偏移方向设定P3300.4/P3300.5
钻/点钻G81X/Y/Z/R/F
钻/镗阶梯孔G82X/Y/Z/R/P/F P为孔底/台阶孔暂停时间
深孔G83X/Y/Z/R/Q/F Q为每次切入量
d为切入安全量 参数设定P3311
攻丝G84X/Y/Z/R/P/F P为孔底正转改反转的暂停时间
粗镗G85X/Y/Z/R/F进退刀速度相等
镗削G86X/Y/Z/R/F孔底主轴停转快速退刀
背镗G87X/Y/Z/R/P/Q/F P为孔底/台阶孔暂停时间Q为偏移量
偏移方向设定P3300.4/P3300.5
镗孔手动退刀G88X/Y/Z/R/P/F手动需要注意孔内安全
孔底暂停镗孔G89X/Y/Z/R/P/F同等G85 多一个孔底暂停
提高盲孔台阶孔底面质量
循环取消G80
极坐标有效G16X/Y半径 角度
G15
坐标旋转G68X/Y/R旋转基点 旋转角度
G69
移量为偏移量。
eTerm指令总结

Eterm全部操作系统注册1.进入系统:>$$OPEN TIP C32.输入工作号 >SI:工作号/密码/级别3.查看PID状态 >DA4.退出系统 >SO5.临时退出 >AO6.恢复临时退出 >AI:工作区/工作号/密码7.修改密码 >AN:旧密码/新密码8.随时查看SIGN-IN信息 >SIIF:9.指令使用帮助 >HELP: 指令10.屏幕向上一页 >PB11.屏幕向下一页 >PN12.最前页 >PF13.最后页 >PL14.清屏指令 >CP15.重复显示当前页 >PG16.一屏显示所有内容 >PN117.查看可销售某航空公司客票权限:DDI: (航空公司代号前显示#则可以销售如: #JR)查询(未包含国外航班查询)1.航班座位可利用及相关情况显示 >AV: 选择项(P、A、E)/城市对/日期/时间/ 航空公司代码(或GDS代码)/经停标识(D,N)/座位等级※座位可利用情况标识:A 可利用座位数在9或9个以上;1~9 可利用座位个数数字显示;L 没有座位(只能候补);Q 只能申请(需向其他航空公司申请且待答复);C 航班完全关闭;X 航班取消(不允许候补或申请);S 限制销售;N 表示无位1.1直接看到航班所有座位情况 >AV: H/城市对/日期1.2在已有AV下查询回程航班 >AV:RA/日期1.3已有AV下查询“*”子舱位 >AV:C/航班序号1.4查询其他某天 >AV:+天数1.5查询当天航班 >AV: 城市对/“.”“+”“–”1.6指定日期某航班的所有舱位 >AV:航班号/日期1.7显示直达航班 >AV:城市对/日期/D1.8显示无经停航班 >AV:城市对/日期/N2. 最早有座位航班查询 >FV: 选择项(P、A、E)/城市对/日期/起飞时间/座位数/航空公司代码(或GDS代码)/经停标识/ 舱位(仅限中国民航航班信息)3. 航班飞行周期的查询 >SK: 选择项(P、A、E)/城市对/日期/时间/航空公司代码/ 舱位 (显示指定时间和前后三天共一周时间)4. 指定日期内所有固定航班查询 >DS:选择项(P、A、E)/城市对/日期/时间/航空公司代码/ 舱位5. 航班经停点和起降时间,机型的显示指令 >FF: 航班号/日期6. 指定日期的航段上的航班详细信息显示 >DSG:C/航班号/座位等级/日期/航段或RT之后, >DSG: 航班序号7. 票价信息查询(国内段) >FD: 起止城市/日期/承运人/选项已有AV中查询 >FD: 序号建立PNR一、航段组1)直接建立航段组 SS>SS:航班号/舱位/日期/航段/行动代码/订座数/起飞时间到达时间行动代码 NN :座位申请;LL:座位候补;RR:准备直接出票(可省)2)间接建立航段组 SD 先使用>AV查询,>SD:航班序号/舱位等级/日期/行动代码/订座数3)不定期航段(OPEN航段)的建立 SN>SN:航空公司代码/舱位/日期/城市对4)到达情况不明航段(ARNK段)的建立 SA (也成为地面运输)>SA:(航班/舱位)/(日期)/起止城市/状态代码状态代码DK/KK/KL/TK/HK/GK/PK:占位状态LL/DW/US/TL/HL/GL/PL:候补状态NN/UU/TN/HN:申请状态XX/HX/NO/UC/UN:删除状态5)旅客行程提示>SA MU5119Y1OCT SHAPEK HK6)调整航段顺序 CS>CS 2/1二、姓名组成人及儿童 >NM:该姓名的订座总数/旅客姓名(特殊旅客代码)婴儿 >XN:IN/婴儿姓名INF(婴儿出生年月)/ 婴儿跟随旅客代号1)英文/拼音姓名的输入 >NM:1STEPHEN/HAETTI 1ZHU/QI2)同姓旅客英文名的输入 >NM:2ZHANG/JIAN/QIANG (只适用于英文字母)3)中文姓名的输入 >NM:1杨振振 1马永4)无人陪伴儿童姓名输入 >NM:1马晓涌(UM4)5)儿童等其他特殊旅客 >NM:1马晓涌CHD6)带一个婴儿的成人输入姓名 >NM:1马永 >XN:IN/马晓涌INF(MAR01)P17)团队旅客PNR建立 >GN:团队订座人数/团名12CHANGYOU※姓名组的修改>旅客姓名序号/所需修改的旅客人数旅客姓名(特殊旅客代码)三、联系组CT (代理人联系信息、旅客联系信息)>CT:城市代码/自由格式文本/旅客标识如>CT:城市/T 电话;电话/P#;T 电话/P#四、出票组TK TL >TK:类型(TL,T)/时间/日期/出票部门/旅客标识五、特殊服务组>SSR:服务类型代码/航空公司代码/行动代号需要该项服务的人数/航段/自由格式文本/旅客标识需要该项服务的航段序号1、证件信息输入1) 国内旅客 >SSR:FOID 承运人HK/证件代码及号码/Pn (证件种类代码:NI-身份证;PP-护照;ID-其他证件)2) 国际旅客 >SSR PSPT 承运人护照号码/国籍/旅客生日/旅客姓/旅客名/性别及婴儿标识/持有人标识/Pn 注:下划线部分为必输项2、常旅客信息输入 >SSR:FQTV 承运人 HK/公司代码卡号/Pn3、特殊服务申请a)特殊餐食申请 >SSR:餐食代码 YY NN1/城市对航班号舱位航班起飞日期/文本/Pn/Snb)儿童申请 >SSR:CHLD YY NN1 儿童出生日期/Pn>SSR:UMNR YY NN1/(城市对航班号舱位航班起飞日期)/文本/Pn/Snc)婴儿 (不占座) >SSR: INFT 航空公司代码 NN1/ 婴儿姓名/BABY 出生日期(DDMMMYY)/ 旅客序号/ 航段序号(占座) >SSR: INFT航空公司代码NN1/BABY 出生日期(DDMMMYY)OCCUPYING SEAT /旅客序号常用特殊服务代码:机位申请NSSA:无烟靠走廊的座位NSSW:无烟靠窗的座位具 NSST:无烟座位SMSA:吸烟靠走廊的座位 SMSW:吸烟靠窗的座位 SMST:吸烟座位特殊餐食AVML:亚洲素食BLML:流食 CHML:儿童餐DBML:糖尿病患者餐FPML:水果拼盘 SFML:海洋餐 HFML:高纤维餐 HNML:印度餐BBML:婴儿餐KSML:犹太教餐 LCML:低卡路里餐LFML:低胆固醇、低脂肪餐LSML:无盐餐MOML:穆斯林餐 VLML:素食(含糖、鸡蛋) VGML:素食(无糖)其他PETC:宠物(需要详细说明) XBAG:额外行李(须说明数量、重量和尺寸)BSCT:摇篮车/吊床/婴儿摇篮 FRAG:易碎行李(须说明数量、重量和尺寸)BIKE:自行车(须说明数量) MEDA:健康状况(需要旅客医疗状况证明)SLPR:机舱内床铺(不包括担架) SPEQ:体育设施(须指明设备类型、数量、重量和尺寸) DEPA:被驱逐出境(有人陪伴) STCR:担架旅客DEPU:被驱逐处境(无人陪伴) UMNR:无人陪伴儿童4、其他特殊服务组5、付款方式组 FP >FP:CASH,CNY 现金>FP:CHECK,CNY 或>FP:CHEQUE,CNY 支票>FP:CHECK,CNY/CA8635-20 航空公司要求代理人输入的特殊代码 >FP:CC/卡号信用卡>FP:MS/卡号杂费证>FP:IN/CASH,CNY 婴儿票6、签注信息组 EI >EI:自由格式内容7、旅游代码组 TC >TC:F/自由格式内容(一般按照航空公司要求输入)8、票价计算组 FC单程>FC:始发城市或机场三字代码两字代码到达城市或机场三字代码该航段票价及票价类别整个PNR中航程的票价及货币代号+END结束标志联程>FC:始发城市或机场三字代码两字代码到达城市或机场三字代码第一航段票价及票价类别两字代码到达城市或机场三字代码第二航段票价及票价类别整个PNR中全航程的票价及货币代号+END结束标志9、票价组国内客票>FN:FCNYxxxx.xx/SCNYxxxx.xx/Cx.xx国际客票>FN:FCNYxxxx.xx/SCNYxxxx.xx/Cx.xx/TCNYx.xxXX/TCNYx.xxXX/TCNYxxx.xxXT 10、自动生成FN/FC/FP项PAT国内BSP客票 >PAT:选项 >PAT:A 选项国际客票 >QTE/XS FSQ, 自动生成FN/FC项: >DFSQa)手工票号输入 TKT>TKT/783-2203752149/P1b)选择制定航段进行票价计算或打票SEL>SEL: 指定航段序号c)打票预览 TKTV>TKTV: 打票机序号d)票号自动传输 STN>STN: 票号/Pn/指定航段序号e)DZ 打印PNR中所有人的客票>DZ:1 仅打印第一个成人所携带的婴儿客票>DZ:1/P1,INF 仅打印第一个成人的客票>DZ:1/P1, ADL 打印PNR中所有婴儿客票>DZ:1,INF 打印PNR中所有成人客票>DZ:1, ADL构成PNR的其他组项1、其他服务情况组OSI >OSI:航空公司代码自由格式文本/ 旅客标识2、备注组 RMK 手工加入 >RMK:自由格式文本/ 旅客标识自动加入 >RMK:航空公司代码/航空公司相对应的记录编号3、邮寄地址组 MA4、开帐地址组 BA5、选择处理组 OPPNR提取,修改,封口,取消一、PNR提取1)根据记录编号提取PNR >RT:记录编号2)根据旅客姓名提取PNR >RT:旅客姓名/航班号/日期/航段(可省略)3)根据旅客名单提取 >ML:选择项/航班号/座位等级/日期/航段或 >RT:序号4)提取完整PNR ① >RT:C/记录编号② >RT:记录编号,RT:C5)提取PNR的历史部分 >RT:U x(x为数字,表示第几次封口)6)返回到PNR的现行部分 >RT:A7)团体旅客订座记录提取 >RT:N/记录编号② >RT:记录编号,RT:N8)提取本部门在该航班的所有订座记录(RR、HK、HN、HL、HX)>ML C/CA1321/7OCT9)提取所有团体PNR记录 >ML G/CA1321/7OCT10)提取所有订妥座位的记录 >ML B/CA1321/7OCT11)提取所有未证实座位的记录 >ML U/CA1321/7OCT12)提取所有非团体PNR记录 >ML NG/CA1321/7OCT13)航空公司记录的提取和转换 >RRT: V/航空公司记录编号/航班号/日期> RRT:OK二、国内航空公司记录的提取和转换 >RRT: V/航空公司记录编号/航班号/日期>RRT: OK(@OK)三、记录分离SP >SP 1/3四、记录修改,取消1)旅客姓名修改>旅客姓名序号/所需修改的旅客人数旅客姓名(特殊旅客代码)2)删除姓名组以外的内容 >XE 序号3)取消 PNR >XEPNR@五、记录封口@正常封口 >@或\使用@K封口 >@Ka)将KK,KL或TK变为HKb)将UU,US或TL变为HLc)将TN变为HNd)将带有NI,UC,UN的项移到PNR的历史部分使用@I封口 >@Ia)航段不连续b)有航班变更标识c)两个连接航段的停留时间小于最小连接时间Q信箱处理Q代号(信箱种类)KK座位证实回复电报SR特殊服务电报TL出票时限RP各部门的联系SC航班变更{未经允许,不得随意提取} RE旅客重复订座TC机票更改GQ综合1.显示信箱种类和信件数量>QT : 信箱/工作号2.信箱开始处理指令>QS: ①信箱②工作号③信箱/工作号3.信箱延迟处理指令>QD:4.信箱释放指令>QN:5.重新显示当前信箱指令>QR :6.信箱转移指令>QC : 信箱的种类/部门代号/优先权选择(P) / E7.信箱发送指令>QE:RP自由格式内容信箱的种类/部门代号/PNR/日期/时间/优先级控制8.结束信箱处理>QD: E >QN: E翻页指令: 存Q翻页QD不存Q翻页QN存Q退出QDE不存Q退出QNE公共信息查询及辅助功能一、查询中文信息(初登陆系统的公告中)YI1)显示所有静态信息的目录 >YI2)显示不含副标题的公告 >YI标题3)显示有副标题的公告 >YI I/某标题一、24小时城市天气预报WF >WF:城市三字代码二、机场转机信息查询 DSM >DSM: PEK三、机场、国家、航空公司代码查询CNTD/CD1)查询城市/机场三字代码 >CNTD:T/城市名称(BEIJING)2)查询城市名称 >CD:三字代码(PEK)3)查询一个国家所有城市 >CNTD:A/CN4)查询国家全称 >CNTD:C/ 国家两字代码(CN)5)查询国家两字码 >CNTD:N/ 国家全称(CHINA)6)查询航空公司信息 >CNTD:D/航空公司两字代码(CA)7)查询航空公司两字代码 >CNTD:M/航空公司名称(AIR CHINA)8)查询三字代码 >CNTD:A/城市名称前几个字母四、计算CO1)四则运算 >CO:四则运算表达式2)计算两城市的时差 >CO:T/ 城市对3)显示某城市时间的GMT标准时间 >CO:T/城市代码/日期/时间4)英里换算成公里 >CO:K/英里数5)公里换算成英里 >CO:M/公里数五、日期查询 >DATE:日期/天数/天数…1)显示当前日期和星期几 >DATE:2)显示10天,90天后的日期 >DATE:10/903)显示2014年1月1日的前2天,及后20天的日期 >DATE:1JAN04/-2/20六、时间查询TIME1)显示当前时间 >TIME: 城市/日期/时间/城市/城市2)北京时间2014年1月1日零点的巴黎时间 >TIME:1JAN14/0000/CDG3)纽约时间2014年1月1日零点的北京、巴黎时间 >TIME:NYC/1JAN/0000/PEK/CDG七、长度、重量、温度换算 >CV: 符号(+,-)、数字、单位(英里MI,公里KM,摄氏度C,华氏度F,英镑LB,千克KG1)100公里换算成英里 >CV 100KM2)100英里换算成公里 >CV 100MI3)摄氏35度转化为华氏度 >CV 35C4)华氏95度转化为摄氏度 >CV 95F5)10英镑转化为公斤 >CV 10LB6)10公斤转化为英镑-磅 >CV 10KG八、翻页功能1.屏幕向上一页 >PB2.屏幕向下一页 >PN3.最前页 >PF4.最后页 >PL5.重复显示当前页 >PG6.一屏显示所有内容 >PN:1九、旅游信息查询TIM1)查询签证信息 >TIM:TIFV2)查询健康检疫信息 >TIM:TIFH3)同时查询签证、健康检疫信息 >TIM:TIFA4)查询与出入境有关的信息 >TIM :TIDFT/城市/章节/小标题/页码5)显示TIM帮助功能 >TIM:TIHELP6)显示TIM中有关规则 >TIM:TIRULES7)显示综合旅游信息新闻 >TIM:TINEWS8)显示下一页 >TIPN9)显示上一页 >TIPBBSP打票1.显示打票机工作状态 >DI:打票机序号2.建立打票机控制 >EC: 打票机序号3. 输入正确票号的流程 >XO: 打票机序号 >TN: 打票机序号X /起始票号检查位-结束票号 >TO: 打票机序号4.清除积票的流程 >DI: 打票机序号 >TE:1/X >DQ: 打票机序号 >TE: 打票机序号/U5. 将积压客票打印出来的流程 >DI: 打票机序号 (检查积票情况和票号) >XO: 打票机序号 >TO: 打票机序号以上全部为本票操作指令。
ABB机器人实际应用总结归纳中的指令说明

ABB机器人实际应用总结归纳中的指令说明(一)ABB机器人指令
1、JOINT指令:Joint指令是ABB机器人操作中最基本的指令,它用
来控制ABB机器人的运动。
Joint指令不仅要求用户指定机器人的力矩,
还要求用户指定机器人的关节转动角度以及机器人到达目标位置的时间。
2、POS指令:Pos指令用来控制ABB机器人在空间位置上的运动,以
及机器人的末端位置。
Pos指令要求用户指定机器人到达目标位置的速度,机器人的最大运动速度,机器人的到达目标位置的最短时间。
3、LINE指令:Line指令用来控制ABB机器人沿一条直线路径的运动。
Line指令要求用户指定机器人运动的起点和终点,以及机器人的最大运
动速度和到达目标位置的最短时间。
4、CYCLE指令:Cycle指令用来控制ABB机器人同一条轨迹多次运动
的指令,可以设置循环次数,指定循环运动的参数,如运动速度,运动的
起始点和终点,以及机器人的到达目标位置的最短时间。
5、WAIT指令:Wait指令用来控制ABB机器人暂停一段时间,在
Wait指令中,用户可以指定暂停时间的长短,也可以指定机器人在暂停
时间内运动的参数,如运动速度等。
6、IF指令:If指令用来控制ABB机器人在满足特定条件时执行特定
操作。
中级电工培训基本逻辑指令

第二节 编程的基本规则与技巧
❖ 二、编程的技巧
❖ 并联电路上下位置可调,应将单个触点的支路放下面。
X4 X1 X2
Y0
ORB
不好!
❖0 ❖1 ❖2 ❖3 ❖4
LD X4 LD X1 AND X2 ORB OUT Y0
X1 X2 Y0
❖ 10 OUT Y3
第一节 基本逻辑指令
❖六、MPS、MRD、MPP 指❖ 令0 LD X1
❖ 梯形图(一层栈例)
❖ 1 MPS ❖ 2 LDI X2
MPS
X1
X2 M0
❖ 3 AND M0 ❖ 4 OR X0
Y1
❖ 5 ANB
X0
❖ 6 OUT Y1
X3
MPP
X4
X5
❖ 7 MPP
❖ 8 AND X3
❖ 6 OUT Y0 ❖ 7 MPP
Y0
❖ 8 AND M102
MPP
M102
Y1
MPP X3 MPS M100
Y2
❖ 9 OUT Y1 ❖ 10 MPP ❖ 11 AND X3 ❖ 12 MPS ❖ 13 AND M100
M105
Y3
MPP
❖ 14 OUT Y2 ❖ 15 MPP ❖ 16 AND M105 ❖ 17 OUT Y3
ANB X1
LD Y0 M100
M115
X2 X3
Y2 M101 T0
ORB
❖ 指令表程序
❖ 步序 指令 地址
❖ 0 LDI X1 ❖ 1 ORI X2 ❖ 2 LDI Y0 ❖ 3 ANI M100 ❖ 4 LDI Y2 ❖ 6 AND
课堂指令总结
课堂指令总结一、引言在教学过程中,教师的指令起着至关重要的作用。
准确、简洁和明确的指令能够帮助学生更好地理解和完成任务。
本文将总结一些常用的课堂指令,旨在提供给教师们一个参考,并探讨如何有效地运用这些指令。
二、常用课堂指令1. 听•“请你们仔细听一下。
”:当教师要开始讲解新内容或重要概念时,可以引导学生集中注意力,并做好接收信息的准备。
•“请注意听我说。
”:当教师解释重点内容、授予新的任务或要求学生理解重要概念时,可使用该指令。
2. 理解•“你能告诉我这个概念的意思吗?”:通过提问学生对所学内容的理解,可检验学生对知识点的掌握程度。
•“请你们讨论一下,看看你们能否理解这个问题。
”:在教学过程中,鼓励学生进行小组或全班讨论,有助于激发学生思考,提高问题理解的质量。
3. 回答•“请你回答一下这个问题。
”:当教师要求学生回答问题时,使用该指令。
在提问过程中,教师可选择不同难度和深度的问题,以鼓励学生思考并参与课堂互动。
•“谁能回答这个问题?”:这个指令可以激发学生的参与积极性,增强课堂的互动性。
4. 讨论•“请你们进行小组讨论。
”:在教学过程中,通过小组讨论促进学生之间的合作和互动,有助于拓展学生思维和观点。
•“请你们就这个问题展开全班讨论。
”:通过全班讨论,学生可以交流自己的观点和意见,提高沟通能力和表达能力。
5. 总结•“请你们总结一下这个故事的主要内容。
”:指示学生对所学内容进行归纳和总结,有助于学生将知识点整理成系统和有逻辑的结构。
•“谁能给我总结一下刚才的讨论结果?”:通过让学生总结讨论的结果,可以检验学生的理解程度和发展他们的分析和综合能力。
三、指令运用的要点1. 清晰明了指令语言要简单明了,不要使用过于复杂的句子和术语。
教师应确保学生能够准确理解指令的含义。
2. 引导思考通过适当的问题和讨论,引导学生思考和深入理解所学内容。
教师要灵活运用各种指令形式,提高学生的思考和解决问题的能力。
3. 体现个别差异指令要考虑到不同学生的学习特点和进展情况,根据学生的实际情况进行不同程度的要求和引导。
PLC指令总结

②③输入端可以外接24v 电源,也可用PLC自带的24v电源,用PLC自带的24v 电源时,只需将L+ 连接到标③或者②相连,M与1M或者2M相连。
输出端不可以直接接电机,因为电机转动时需要的电流,足够摧毁你的PLC。
明智的做法是,用PLC控制一个交流接触器驱动电机S7-200指令集梯形图(LAD)ladder diagram 第一章Bit Logic位操作指令基本位操作指令常开触点指令:当位值为1时,常开触点闭合,常闭触点指令:当位值为0时,常闭触点闭合常开立即触点指令:常闭立即触点指令:取反指令:正跳变触点指令EU(Edge Up):正跳变触点检测到一次正跳变时,触点接通一个扫描周期;负跳变触点指令ED(Edge Down):负跳变触点检测到一次负跳变时,触点接通一个扫描周期;(图1-1)基本位操作指令线圈输出指令:立即线圈输出指令:置位指令:从起始位Bit开始的N个元件置1并保持立即置位指令:复位指令:从起始位Bit开始的N个元件置0并保持立即复位指令:(图1-2)位操作指令_线圈置位优先触发器:复位优先触发器:空操作指令:(图1-3)PLC位逻辑控制原理与继电器控制原理的比较当I0.0的按钮SB1按下,效果就好比是继电器控制的SB1按下,线圈接通。
当I0.1的按钮SB2按下,效果就好比是继电器控制的SB2按下,线圈断电。
图1-3 PLC的输入设备接线图第二章Compare比较操作指令当比较结果为真时,比较指令使触点闭合[例5.13]整数(16位有符号整数)比较指令应用计数器C0的当前值大于或等于1000时,输出线圈Q0.0通电。
第三章Convert转换操作指令第四章Counters计数器操作指令图4-1图4-1 中CXXX 为计数器编号,取C0—C255 。
CU-增1计数脉冲输入端;CD-减1计数脉冲输入端;R-复位脉冲输入端;LD-减计数器的复位输入端。
PV预置值(INT)最大范围32767。
32位PowerPC常用指令集总结

32位PowerPC常用指令集总结第一部分PowerPC 精简指令集计算机(RISC)简介PowerPC 体系结构是一种精减指令集计算机(Reduced Instruction Set Computer,RISC)体系结构,定义了200 多条指令。
PowerPC 之所以是RISC,原因在于大部分指令在一个单一的周期内执行,而且通常只执行一个单一的操作(比如将内存加载到寄存器,或者将寄存器数据存储到内存)。
PowerPC 体系结构分为三个级别(或者说是“book”)。
通过对体系结构以这种方式进行划分,为实现可以选择价格/性能比平衡的复杂性级别留出了空间,同时还保持了实现间的代码兼容性。
Book I. 用户指令集体系结构(Power ISA User Instruction Set Architecture)定义了通用于所有PowerPC 实现的用户指令和寄存器的基本集合。
这些是非特权指令,为大多数程序所用。
Book II. 虚拟环境体系结构(Power ISA Virtual Environment Architecture)定义了常规应用软件要求之外的附加的用户级功能,比如高速缓存管理、原子操作和用户级计时器支持。
虽然这些操作也是非特权的,但是程序通常还是通过操作系统调用来访问这些函数。
Book III. 操作环境体系结构(Power ISA Operating Environment Architecture)定义了操作系统级需要和使用的操作。
其中包括用于内存管理、异常向量处理、特权寄存器访问、特权计时器访问的函数。
Book III 中详细说明了对各种系统服务和功能的直接硬件支持。
由于我目前手上的开发板是基于e600内核,所以我在学习PowerPC指令集的过程中,顺便总结了e600内核常用的指令集,如果大家发现我总结的指令集有错误或者不准确的地方,欢迎留言指出来,O(∩_∩)O~第二部分e600指令集飞思卡尔的e600内核实现了booke内核构架中64位指令集的中的32位指令(即在e600的32位寄存器中,第0位相当于booke中的64寄存器的第32位,第31位相当于booke中64寄存器的第63位),E600内核采用大端编码方式,指令的第0位是MSB(Most Significant Bit)位,第31位是LSB(Least Significant Bit)。
凯恩帝循环指令总结
K2000M/M8铣床/加工中心用数控系统
功能指令地址符说明及参数设定
高速深孔G73X/Y/Z/R/Q/F Q为进刀量/抬刀量参数P3310
返攻丝G74X/Y/Z/R/P/F P为孔底反转改正转的暂停时间
精镗G76X/Y/Z/R/P/Q/F P为孔底/台阶孔暂停时间Q为偏移量
偏移方向设定P3300.4/P3300.5
钻/点钻G81X/Y/Z/R/F
钻/镗阶梯孔G82X/Y/Z/R/P/F P为孔底/台阶孔暂停时间
深孔G83X/Y/Z/R/Q/F Q为每次切入量
d为切入安全量 参数设定P3311
攻丝G84X/Y/Z/R/P/F P为孔底正转改反转的暂停时间
粗镗G85X/Y/Z/R/F进退刀速度相等
镗削G86X/Y/Z/R/F孔底主轴停转快速退刀
背镗G87X/Y/Z/R/P/Q/F P为孔底/台阶孔暂停时间Q为偏移量
偏移方向设定P3300.4/P3300.5
镗孔手动退刀G88X/Y/Z/R/P/F手动需要注意孔内安全
孔底暂停镗孔G89X/Y/Z/R/P/F同等G85 多一个孔底暂停
提高盲孔台阶孔底面质量
循环取消G80
极坐标有效G16X/Y半径 角度
G15
坐标旋转G68X/Y/R旋转基点 旋转角度
G69
移量为偏移量。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
名称指令格式操作说明数据传送MOV DST,SRC DST SRC堆栈Push SRC 16位指令:(SP) (SP)-2; ((SP)-1, SP) (SRC) POP DST 16位指令:(DST) ((SP)+1, SP) ; (SP) (SP)+2Pusha 所有16位通用寄存器;(SP) (SP)-16POPA 弹出堆栈中8个数据依次存入(DI,SI,BP,SP,BX,DX,CX,AX)PUSHFPOPF交换XCHG DST, SRC DST SRCCMPXCHG DST, SRC 将(DST)与(AC)相比较,若(DST)=(AC),将(SRC) (DST) 置ZF=1;若(DST) (AC),将(DST) (AC),置ZF=0XADD DST, SRC a、TEMP (SRC)+(DST)b、(SRC) (DST)c、(DST) (TEMP)换码XLAT AL ((BX)+AL)地址传送指令LEA REG,SRC (REG)←SRC 源操作数的有效地址EA传送到指定寄存器LDS REG,MEM (REG)←(MEM),源操作数MEM所指定存储单元内容作为有效地址存入寄存器标志传送指令LAHF (AH)←(FLAGS的低字节)SAHF (FLAGS的低字节)←(AH) ;AH中相应位(D7、D6、D4、D2、D0)的状态分别传送到标志寄存器FLAGS的对应位输入输出指令IN AL,DX;用于I/O端口到CPU的数据输入操作。
OUT port ,AX 用于CPU到I/O端口的数据输出操作逻辑运算5个ADD DST, SRC (DST)←(DST)∧(SRC) OR DST,SRCNOT DSTXOR DST,SRCTEST DST,SRC移位指令算术移位和逻辑移位SAL DST,CNT按照CNT规定的移位次数,对目的操作数DST进行左移,每移一次,最高位MSB移入CF ,而最低位LSB补0。
SHL DST,CNTSAR DST,CNT按照CNT规定的移位次数,对目的操作数DST进行右移,每移一次,最高位MSB(符号位)保持不变,最低位LSB移入CF助记符格式功 能 说 明 操 作 CLC (clear carry) 进位标志清 0→CF CMC (complement carry) 进位标志取反 CF →CFCLD (clear direction) 方向标志清0 0→DF STD (set direction) 方向标志置1 1→DF CLI (clear interrupt) 中断标志清0 0→IF STI (set interrupt)中断标志置11→IF循环移位指令ROL DST ,CNT目的操作数每向左移位一次,其最高位MSB 移入最低位LSB ,MSB 同时也移入CF 。
ROR DST ,CNT目的操作数每向右移位一次,其最低位LSB 移入最高位MSB ,LSB 同时也移入CF 。
RCL DST ,CNT目的操作数每向左移位一次,其最高位MSB 移入CF ,CF 移入最低位LSB 。
RCR DST ,CNT目的操作数每向右移位一次,其最低位LSB 移入CF ,CF 移入最高位MSB 。
串操作指令REP重复其后指令串的操作直至(CX) = 0;用于串传送、串装入、串存储指令前MOVS DST ,SRC 源串元素传送到目的串单元中CMPS DST ,SRC 源串元素与目的串元素相减并进行比较,但并不回送结果,只影响标志位ZF SCAS DST 搜索指令执行的仍是比较(减法)操作,结果只影响标志位LODSSRC源串元素装入累加器中 STOS DST 累加器中的内容存入目的串中INS DST ,DX 按照DX 给出的端口地址,从外设读入数据并送入目的串存储单元中OUTSDX ,SRC指 令 格 式测试条件(标志) 功 能 说 明LOOP 目标地址((E)CX) ≠ 0循环LOOPE/LOOPZ 目标地址 ZF = 1且((E)CX) ≠ 0 等于/结果为0循环 LOOPNE/LOOPNZ 目标地址 ZF = 0且((E)CX) ≠ 0 不等于/结果不为0循环 JCXZ 目标地址((E)CX) = 0(E)CX 内容为0转移名称 指令格式 操 作 说 明ADD DST ,SRC (DST)←(SRC) + (DST)ADC DST ,SRC (DST)←(SRC) + (DST) + CF 加 法INC DST (DST)←(DST) + 1 SUB DST ,SRC (DST)←(DST) - (SRC) SBB DST ,SRC (DST)←(DST) - (SRC) - CF DEC DST (DST)←(DST) - 1 NEG DST (DST)←0 - (DST)减 法CMP DST ,SRC (DST) - (SRC),设置标志位 字节:(AX)←(AL)*(SRC) 字:(DX:AX)←(AX)*(SRC) MUL SRC双字:(EDX:EAX)←(EAX)*(SRC)IMUL SRC 同MUL ,但必须是有符号数,而MUL 是无符号数 字:(REG16)←(REG16)*(SRC) IMUL REG ,SRC 双字:(REG32)←(REG32)*(SRC) 字:(REG16)←(SRC)*(DATA) 乘 法IMUL REG ,SRC ,DATA双字:(REG32)←(SRC)*(DATA)字节:(AL)←(AX)/(SRC)的商,(AH)←(AX)/(SRC)的余数 字:(AX)←(DX:AX)/(SRC)的商,(DX)←(DX:AX)/(SRC)的余数 DIV SRC双字:(EAX)←(EDX:EAX)/(SRC)的商, (EDX)←(EDX:EAX)/(SRC)的余数 除 法IDIV SRC同DIV ,但必须是有符号数,而DIV 是无符号数名称指令格式 操 作 说 明DAA① 若(AL)中低4位>9或AF = 1,则(AL)←(AL)+ 06H ,并使AF = 1 ② 若(AL)中高4位>9或CF = 1,则(AL)←(AL)+ 60H ,并使CF = 1 DAS① 若(AL)中低4位>9或AF = 1,则(AL)←(AL)- 06H ,并使AF = 1 ② 若(AL)中高4位>9或CF = 1,则(AL)←(AL)- 60H ,并使CF = 1 AAA① 若(AL)中低4位>9或AF = 1,则(AL)←(AL) + 06H ,(AH)← (AH) + 1,并使AF = 1 ② (AL)←(AL)∧0FH ③ CF ←AFAAS① 若(AL)中低4位>9或AF = 1,则(AL)←(AL) - 06H ,(AH)←(AH) -1,并使AF = 1 ② (AL)←(AL)∧0FH ③ CF ←AFAAM (AH)←(AX)/0AH 的商,(AL)←(AX)/0AH 的余数 BCD 调整指令AAD (AL)←(AH)*10 + (AL),(AH)←0 CBWAL 的符号位扩展到AH CWD AX 的符号位扩展到DX CWDE AX 的符号位扩展到EAX 符号扩展CDQEAX 的符号位扩展到EDX指 令 格 式设置条件(标志)功 能 说 明SETC/SETB/SETNAE DST CF = 1 有进位/低于/不高于且不等于 SETNC/SETAE/SETNB DST CF = 0 无进位/高于或等于/不低于 SETO DST OF = 1 溢出 SETNO DST OF = 0 无溢出 SETP/SETPE DST PF = 1 校验为偶 SETNP/SETPO DST PF = 0 校验为奇 SETS DST SF = 1 为负数 SETNS DST SF = 0 为正数SETA/SETNBE DST CF = ZF = 0 高于/不低于且不等于 SETBE/SETNA DST CF = 1或ZF = 1 低于或等于/不高于 SETE/SETZ DST ZF = 1 等于/为零 SETNE/SETNZ DST ZF = 0不等于/非零 SETG/SETNLE DST ZF = 0且SF = OF 大于/不小于且不等于 SETGE/SETNL DST SF = OF 大于或等于/不小于 SETL/SETNGE DST SF ≠ OF小于/不大于且不等于 SETLE/SETNG DSTZF = 1或SF ≠ OF小于或等于/不大于名 称 指 令 格 式 测试条件(标志) 功 能 说 明无条件 转移JMP 目标地址无条件转移JA/JNBE 目标地址 CF = 0且ZF = 0 高于/不低于也不等于转移(无符号) JAE/JNB 目标地址 CF = 0 高于或等于/不低于转移(无符号) JB/JNAE 目标地址 CF = 1低于/不高于也不等于转移(无符号) JBE/JNA 目标地址 CF = 1或ZF = 1 低于或等于/不高于转移(无符号) JG/JNLE 目标地址 ZF = 0且 SF ⊕OF = 0 大于/不小于也不等于转移(有符号) JGE/JNL 目标地址 SF ⊕OF = 0 大于或等于/不小于转移(有符号) JL/JNGE目标地址 SF ⊕OF = 1 小于/不大于也不等于转移(有符号) JLE/JNG 目标地址ZF = 1且 SF ⊕OF = 1 小于或等于/不大于转移(有符号) JE/JZ 目标地址 ZF = 1 等于/结果为0转移 JNE/JNZ 目标地址ZF = 0 不等于/结果不为0转移 JC 目标地址 CF = 1 进位为1转移 JNC 目标地址 CF = 0 进位为0转移 JO 目标地址 OF = 1 溢出转移 JNO目标地址 OF = 0 不溢出转移JNP/JPO 目标地址 PF = 0 奇偶位为0/奇偶性为奇转移 JP/JPE 目标地址 PF = 1 奇偶位为1/奇偶性为偶转移 JNS目标地址SF = 0 符号位为0转移 条件 转移JS 目标地址 SF = 1符号位为1转移。