牵引式测功系统设计
城市轨道车辆电力牵引实验台测控系统设计
集通道 和信号输入类型 、 存储路径 等。运行过程 中, 过对 通 系统参数 的采 集进行故障判断 , 当发 生过流 、 过压或参 数波
转速和实车保 持 1 1比例 , : 而功率和转矩采用 3 1 :9进行 等 比例缩放 , 即实验系统采用 3 W 电机模拟实车 1 0 W 牵 0 k 9 k 引 电机的运行工况。在负 载子系统 一侧 , 采用交 流测功 机 作为负载电机 , 为牵 引侧提供实时 的动态反转矩 , 以模拟车
. . 一 一 一 一 。 . . 一 . . . 一 . 一 . . 一 一 。 一 一 一 一 . . 一 . 一 一 . . 一 . . 。 一 一 一 一 . . . . 一 一 . . . . . 一 . . 一
i
系统在初 始化过后 , 首先进行 多项 参数 的设 置 , 括采 包
3 测控 系统软件设计
3 1 软 件 总 体 结 构 .
系统采用 L b IW 来进行测 控平 台的软件设计 , aV E 该类
G语言便于 同时对多传感器进 行数据采样 、 理与分 析、 处 显
示, 并且界 面友 好 , 能稳 定 。系 统 软件 的设 计 流程 如 性
控 台l ! 苎 兰F 兰 兰 ! : ! 竺 竺 竺l 平 兰 ! 竺 竺 竺 : 竺 翌 同 苎
0 引 言
况 下 牵 引动 态 特 性 的测 试 。
牵引传动系统工作特性的研究是城市轨道交通相关课
1 城轨车辆电力牵引实验台的总体 结构 城市轨道 车辆电力牵引实验系统采用 3 0V工频交 流 8 电供电。在牵 引子系统 一侧 , 流逆变单 元 内含 5 0V直 整 4
流 母 线 , 逆 变 后 对 牵 引 电机 进 行 V V 经 V F控 制 。牵 引 电 机
空投牵引力测试系统设计
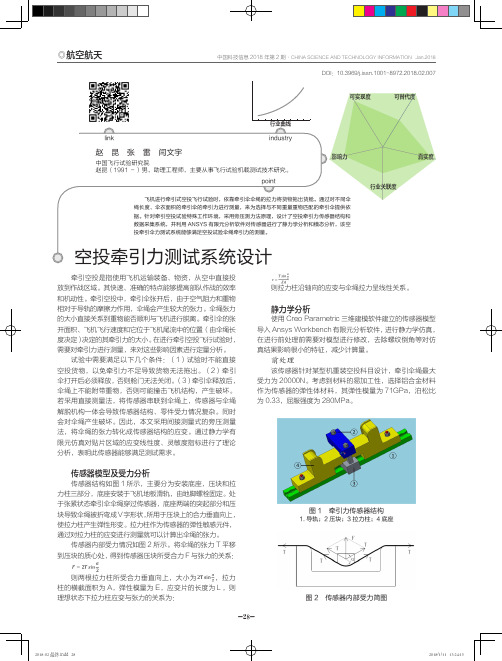
则两根拉力柱所受合力垂直向上,大小为,拉力柱的横截面积为E,应变片的长度为L,则则拉力柱沿轴向的应变与伞绳拉力呈线性关系。
静力学分析
link
赵 昆 张
中国飞行试验研究院
赵昆(1991-)男,助理工程师,主要从事飞行试验机载测试技术研究。
图1 牵引力传感器结构
1.导轨;2压块;3拉力柱;4底座
图2 传感器内部受力简图
(b
,高为为伞绳的宽度),该柱面所受压强处处是均匀的,大小为P。
如图3所示,对于任意的圆心角为dθ
所有单元向上的合力即为压块所受合力:
给压块加载大小为P的面力,底座施加固定约束。
求解模态分析
模态分析是为了得到传感器的固有频率、振形和阻尼比,式中:U0为输出电压,U为供电桥压。
R1,R2为轴向贴片,
图3 弧面受力图示
图8 牵引力测试系统
结语
为了准确测量重装空投试飞科目中牵引伞伞绳的张力,本文提出了一种适用于牵引伞张力测量的传感器,使用Creo Parametric建模,并利用Ansys Workbench对模型进行静力学和模态有限元分析,该设计具有以下优点:1) 所设计的传感器不会破坏绳索的结构,采用地脚螺栓安装与飞机导轨,便于安装与拆卸。
2) 采用旁压测力法,将牵引力张力的转化为传感器拉力柱的应变,其量程范围,传感器结构强度,灵敏度满足牵。
动车组牵引计算仿真系统设计研究

动车组牵引计算仿真系统设计研究摘要:随着高铁的快速发展,动车组的牵引计算成为了一个重要的研究方向。
本文设计并研究了一种动车组牵引计算仿真系统,旨在提供一种可行的方法来准确计算动车组的牵引能力,并优化其牵引系统的设计。
1.引言在现代高铁交通中,动车组的运行速度正在不断提高,对于牵引能力的要求也越来越高。
而动车组的牵引计算是一个复杂的过程,涉及到多个因素的综合考虑。
因此,设计一种能够准确计算动车组牵引能力的仿真系统,对于动车组的研发和运营具有重要意义。
2.系统设计与原理该仿真系统的设计基于牵引力的计算原理和动车组的工程数据。
系统包括以下几个主要部分:(1)牵引力模型:根据列车的动力性能参数和负载情况,建立了动车组的牵引力模型。
该模型考虑了列车的重量、速度、坡度等因素,并基于传动系统的特性进行了修正。
(2)数据输入和处理:用户可以输入动车组的参数和运行条件,包括列车的质量、车辆数量、线路的坡度和曲线半径等。
系统会根据这些输入数据对动车组的牵引力进行计算,并输出相关的结果。
(3)结果显示与优化:系统会将计算得到的牵引力结果进行显示,并提供优化的建议。
用户可以根据这些结果对动车组的设计和运行进行优化。
3.系统实现该仿真系统的实现基于计算机软件,并使用了一些专用的仿真工具和算法。
系统采用面向对象的编程方法,将各个模块分别实现为独立的对象,并通过消息传递的方式进行数据交互。
系统还使用了一些数值计算和优化算法,以提高计算的精度和效率。
4.实验与应用通过对实际动车组的数据进行仿真计算,验证了该系统的准确性和可行性。
实验结果表明,该系统能够对动车组的牵引能力进行准确计算,并提供了有益的优化建议。
该系统可以应用于动车组的设计和改进,以提高其牵引能力和运行效率。
5.结论本文设计并研究了一种动车组牵引计算仿真系统,该系统能够准确计算动车组的牵引能力,并提供有益的优化建议。
通过实验验证,该系统具有一定的可行性和实用性。
未来可以进一步完善该系统,以提高其精度和效率,并应用于实际的动车组设计和运营中。
牵引供电系统的监控测试系统的设计及应用方案

牵引供电系统的监控测试系统的设计及应用方案为了减少制动能量在列车制动电阻上的耗散,抑制地铁隧道内温度的升高和减少车载设备,国外一般在牵引变电所的直流母线上设置再生制动能量吸收装置。
设置再生制动能量吸收装置的供电系统区别于传统的二极管不控整流供电系统,又被称为城市轨道交通新型供电系统。
新型牵引供电系统的结构由若干整流器单元多重化并联组成。
采用这种结构方式,可以提高系统的供电质量,同时供电装置扩容容易,并可以提供一定的冗余性。
另外其直流侧的制动能量可以回馈到交流电网,交流侧功率因数可调,并且直流侧的输出特性完全可控。
为了保障供电系统调试及运行的正常,要求对供电系统动态过程中的各电气参量、温度值及开关量等进行测量、传输、显示、存储及故障诊断,方便用户观察数据、分析数据。
而目前测量电参数主要依靠示波器、电压表、电流表以及万用表等仪表装置,这些仪表会影响PWM整流器的正常运行、威胁技术人员人身安全、使调试过程复杂化等,急需开发一种新的技术来代替传统的测量仪器。
此外,为方便设计人员调试修改供电系统底层程序,需要设计控制系统,实现与主控板的数据通讯。
为了解决以上问题,本文研究了新型供电系统的监控要求,以PWM整流器子系统为监控对象,设计了包含监测子系统和控制子系统的监控试验平台。
1监控系统方案根据系统的设计要求、考虑到设计人员和使用人员的应用层次不同,本文设计的新型能馈式牵引供电系统的监控系统主要分为两个部分,即监测子系统和控制子系统,如图1所示。
由图1可知,本监测控制系统的主要由监测子系统和控制子系统构成,其中监测子系统又包括下位机系统和上位机系统,控制子系统主要通过设计控制器实现。
新型能馈式牵引供电系统监控结构图如图2所示。
1.1监测子系统研究新型能馈式牵引供电系统监测子系统的示意图如图3所示,监测子系统由下位机系统和上位机系统构成。
1.1.1监控子系统的下位机系统研究监测子系统的下位机系统主要由多路传感器、信号调理板、监测板以及网络通信传输单元构成。
便携式转辙机多机牵引测试系统的设计
1 引 言
随着 我 国经 济 的 发展 , 路 运 力不 足 的 问题 凸 铁 显 。铁路 主管部 门提 出客运 快速 和货 运重载 并举 的 发展方 向 , 以缓 解 运 力不 足 的 问 题 。铁路 轨 道 有一
多点 的牵引方 式 。我 国转 辙机 多机 牵 引系 统 ( 以下 简称 为多机 牵引 系统 ) , 中 根据 道 岔号 的不 同 , 已经
mu t ~t c in s se ’ e ta d i c n e in eo e e i i gs l t n l i r t y tm s ts n n o v n e c f xs n o ui .B s d o h n l s f h s a o h t t o a e n t ea ay i o et t s t e rq i me t t e h r w r n o t a e p afr o a h n d sd sg e i i hy p f r a c d p o e ur e n , ad a e a d s f r l t m fe c o e i e in d w t h g l e o h w o h m n e r—
方便 、 工作 稳定 、 可靠 性好 。
关键词 :i e 技术;IM 40 O模块; Z Be g ZC 2 1P 转辙机测试; 多机牵引
D I O 编码 :0 3 6 / .s .0 2— 2 9 2 1 .6 0 9 1 .9 9 ji n 10 2 7 .0 1 0 . 1 s
中图分 类号 :P 1 T 26
( oeeo uo ai , o h et o t h i l C lg l fA t t n N n ws P l e n a m o yc c
瑙 ,ia 1 19 C i ) X ’n7 02 ,hn a
新型牵引试验车测试系统开发
新型 牵 引试 验 车测试 系统 开 发
冀 彬 ,王 志峰 ,张 波 ,苏发 明 ( 太 原铁路 局 科委 , 山西太 原 02 1;2 中国铁道 科 学研 究 院 机 车车辆研 究所 ,北 京 108) 1 323 001
摘 要 结合太原铁路局牵 引试验车 的设 计与开发 ,介绍 了新型牵 引试 验车测试 系统的功能 、组成及 工作原
存储 ,另提供人机交互界面 ,允许用户通过该界面对 采集 进程 进行 控 制 ,并 以直 观 形 式将 实 时 采 集 结果 呈 现 给试验 人员 。
尊 调
理 部
13 系统 功能 .
()测 试参 数 1 新型试 验 车测试 系统 测试 参 数 涵 盖 铁路 局牵 引试
分
验所需的基本参数 ,包括机车挽钩牵引力、速度、牵 引 电机 电压及 电流 、 主发 电机 电压 、 网压 、 主变 压 器 原边 电流 、列 车管压力、副 风缸压力、制动缸压 力、 列 车运 行 时分 ( 括 区 间 运行 时分 、站 停 时 分 、途 停 包 时分 ) 、走 行公 里等 。
文献 标 志码 :A
中 图分 类 号 :U 6 .3 24 31
大秦 线 是 我 国第 一 条 双 线 重 载 电气 化 运 煤 专 线 ,
()适 用不 同机 型 1
20 年大秦线煤炭运量就 已达到 1 02 亿吨的设计能力 ,
大秦 线必须立 足 既有 条 件 ,通 过 技 术装 备 升 级在 较 短 时 间内大 幅度 提 高大 秦 线 的运输 能 力 。20 起 ,大 07年 秦线 开始批量 投 入和谐 型交 流 传动 电力 机 车 。和谐 型 机 车是我 国铁 路通 过 引进 消 化 吸收 再 创新 生 产 的大 功
电力机车牵引系统的设计与优化
电力机车牵引系统的设计与优化近年来,随着电力机车的广泛应用,电力机车牵引系统的设计与优化成为一个重要的研究领域。
电力机车作为铁路运输的重要组成部分,其牵引系统的性能直接影响着车辆的运行效率和能耗。
因此,设计和优化电力机车牵引系统具有重要的理论和实践意义。
电力机车牵引系统主要包括电力装置、转向架、传动装置和辅助设备等几个部分。
电力装置主要由电动机、牵引变流器和供电系统等组成,是实现机车牵引力的关键部件。
传统的牵引系统采用串联电阻制动方式,但这种方式存在能量浪费、制动效果差等问题。
因此,如何在设计中考虑能效和性能优化成为牵引系统设计的重要课题之一。
在电力机车牵引系统的设计和优化过程中,需要综合考虑机车的起动性能、牵引力输出能力以及能耗等因素。
首先,起动性能直接影响机车的加速能力,提高其起动性能可以减少起动时间,提高列车的运行效率。
此外,牵引力输出能力是电力机车牵引系统的核心指标,根据不同运行条件的需求,能够根据需要调整机车的牵引力输出。
同时,为了降低能耗,需要设计优化具有高效率的电力装置,减少系统能量损失,提高整车的运行效率。
在电力机车牵引系统的设计和优化中,还需要考虑不同运行条件下的适应性。
由于铁路运输的特殊性,机车在不同路段具有不同的运行环境和载荷要求。
因此,电力机车牵引系统的设计需要充分考虑这些因素,并根据不同的工况要求进行适应性设计。
例如,在起动和加速阶段,需要提供较大的牵引力输出;而在超过额定速度后,可以适当降低牵引力以降低能耗。
此外,还需要考虑牵引系统在不同牵引速度范围内的响应性和稳定性,以保证机车的正常运行和安全性。
为了实现电力机车牵引系统的设计和优化,需要综合运用多学科知识和技术手段。
例如,通过使用先进的仿真软件建立准确的牵引系统模型,可以在不同工况下对系统进行性能评估和优化设计。
同时,结合实际运行数据和经验,可以对系统的参数进行修正和改进,以实现更好的牵引效果和能效。
综上所述,电力机车牵引系统的设计与优化是一个涉及多学科的复杂问题。
地铁列车牵引逆变器测试系统及方法与制作流程

地铁列车牵引逆变器测试系统及方法与制作流程一种地铁列车牵引逆变器测试系统及方法,包括针对地铁列车的牵引逆变器的地铁列车辅助逆变器模块的离线测试装置的上位PC机和下位机;下位机将状态消息发送到PC机,所述PC 机把状态消息通过无线网传递到备份终端进行贮存而备份,所述备份终端能够是笔记本电脑,所述备份终端通过无线网与该PC机通信连接,所述无线网能够是3G网或者4G网。
所述PC机把状态消息传递到备份终端的方式是所述PC机把状态消息以消息报文的形式传递到备份终端;结合其它的结构和方法有效避免了现有技术中不利于PC机认定来回耗时的正确性、后面的PC机传递消息报文的个数增加不快、减小了消息报文的传递速度的缺陷。
权利要求书1.一种地铁列车牵引逆变器测试系统,包括针对地铁列车的牵引逆变器的地铁列车辅助逆变器模块的离线测试装置的上位PC机和下位机;其特征在于,下位机将状态消息发送到PC机,所述PC机把状态消息通过无线网传递到备份终端进行贮存而备份,所述备份终端能够是笔记本电脑,所述备份终端通过无线网与该PC 机通信连接,所述无线网能够是3G网或者4G网。
2.一种地铁列车牵引逆变器测试系统的方法,其特征在于,所述PC机把状态消息传递到备份终端的方式是所述PC机把状态消息以消息报文的形式传递到备份终端,所述PC机把状态消息以消息报文的形式传递到备份终端的方法包括如下步骤:步骤A-1:备份终端收受PC机传递的消息报文;在该方法里,起初经备份终端构造与所述PC机间的链接,朝PC 机要求链接通信中的消息报文,所述PC机与备份终端间构造链接后,就依照所述链接通信里每个要传递的消息报文的次序,朝备份终端传递所述链接通信里的每个消息报文;所述PC机以低速运用的方式朝备份终端传递所述链接通信里的每个消息报文,也就是,首次朝备份终端传递所述链接通信里的消息报文之际,仅朝备份终端传递所述链接通信里的首个消息报文,在收受到备份终端返回的回馈消息后,凭借收受到所述回馈消息的时点与传递相应消息报文的时点,认定PC机至备份终端的来回耗时,接着凭借认定的来回耗时配置阻滞限定值,也就是,后一次要朝备份终端传递的所述链接通信里的消息报文的个数的值;步骤A-2:认定所述消息报文所隶归的链接通信;所述备份终端在收受到一消息报文后,能凭借所述消息报文里具有的识别消息,认定所述消息报文所隶归的链接通信;步骤A-3:认定所述消息报文是不是是认定的所述链接通信里的首个消息报文,如果是,就转到步骤A-4里进行,如果不是,就转到步骤A-5里进行;步骤A-4:朝所述PC机回传回馈消息。
悬挂农机具牵引力电子测试系统的设计分析
悬挂农机具牵引力电子测试系统的设计分析摘要:介绍了农机具牵引力传感器的结构与原理,以及悬挂农机具电子测试系统的组成和原理。
该系统可以为农机具研究与开发、产品鉴定及引进动力匹配与节能研究、农机教学与科研等提供较先进的测试手段和技术,具有一定科研和技术服务价值。
关键词:牵引力;力传感器;电子测试系统;应用研究1问题的提出拖拉机悬挂机构和悬挂农具出现以后,测力装置的研究开始引起国内外许多高校、研究所和试验鉴定部门的高度重视,而且进行了长时间的试验研究。
目前国内至今仍处于引进技术、改进设计和试用阶段。
还没有形成规模产品。
在研究对照了国内外17种悬挂测力装置后。
吸取有框架式测力装置的特点。
对悬挂式农具与拖拉机之间较复杂的相互作用力进行了准确的测量。
为农机动力与农机具匹配及农机具的开发研究提供技术依据。
2农机具牵引力2.1农机具牵引力概述农业机械是农业生产巾使用的各种复杂机器和简单农具的总称。
田间作业机械除少数自走式机器和专用机器外。
其余几乎全是把动力部分作成一台通用拖拉机.把作业部分作成另一个单独的机器,到需要作业的时候才把他们连接起来。
作业机与拖拉机连接的方式包括悬挂式、半悬挂式、牵引式等几种,以悬挂式最为普遍。
对于牵引式农机来说.农业机械牵引力的测量只需要在拖拉机与农具之间安放拉力传感器或机械式拉力表即町进行。
作业机在田间工作时.由于是处于不断移动的状态,速度、阻力、部件位置等各种冈素均难于保持衡定。
因而作业机的力学平衡也是一种经常变化的动态平衡,这种动态平衡对作业机的工作稳定性、动力消耗及作业质量均有显著影响。
而牵引力的位置则是影响其平衡状态的重要因素。
2.2牵引力传感器的测力原理1)东方红-802与悬挂四铧犁进行悬挂牵引阻力测试耕深为210~230mm;2)CLx30型测力装置是与东方红-802或(75)拖拉机悬挂机构及其配套的悬挂农具相连接的其挂结点销与孔的公称尺寸为上悬点f30mm下悬点左右均为f35mm测力范围为0~30kN3)Y6DL-3型动态电阻应变仪用于弯曲应变信号的放大检波和滤波其测量电压为0~1V线性误差为1%测电流为2440mA线性误差不大于1%;3)数据采集卡型号为DAQ-801是一种与笔记本电脑相配套的PCMIA便携式数据采集卡其主要性能指标为分辨率16bit采样频率0.006~100kHz4通道差分输入/8通道单端输入输入电压10V触发采用模拟触发等使用时将其插入笔记本电脑的PCMIA插槽用于对调理后的被测信号模拟量和脉冲量进行自动采集和A/D转换并送入计算机。
牵引系统方案
牵引系统方案牵引系统是主缆索股架设的必备设备,它的优劣直接影响到主缆架设的成败和质量,本工程上部安装总体工期比较紧,为提高效率、确保工期,主缆拽拉牵引系统采用单线往复式牵引系统,牵引系统的牵引索两端分别卷入主、副卷扬机,一端用于卷绳进行牵引,另一端用于放绳,两台驱动装置联动,使牵引索作往复运动。
在上下游各架设一组相互独立的承重索道,承重索上安装3t开口滑车作跑马滑车,滑车下悬挂手拉葫芦吊挂锚头,与牵引系统共同持股牵引。
同时可用于索夾、吊杆的安装、紧缆以及小型机具、料具的吊运等。
采用单线往复式牵引系统具有结构简单,操作方便;且容易实现较大的牵引力,牵引作业时能控制速度等特点。
1. 牵引系统布置在牵引系统方案确定后结合施工现场场地、索盘运输道路状况等实际因素,5t主牵引卷扬机布置在锚固端横梁面上,放索区布置在一侧,对应的3t副卷扬机放置在另一侧岸,牵引过程采用人工打梢收放牵引绳,形成一套单线往复式牵引系统。
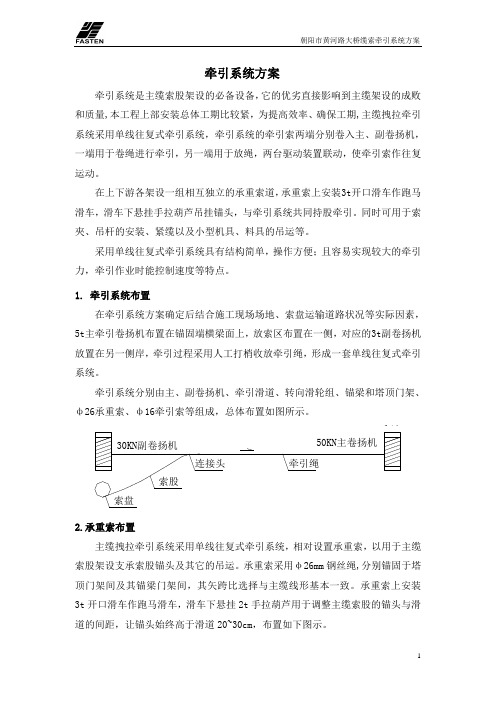
牵引系统分别由主、副卷扬机、牵引滑道、转向滑轮组、锚梁和塔顶门架、ф26承重索、ф16牵引索等组成,总体布置如图所示。
西岸东岸50KN主卷扬机30KN副卷扬机连接头牵引绳索股索盘2.承重索布置主缆拽拉牵引系统采用单线往复式牵引系统,相对设置承重索,以用于主缆索股架设支承索股锚头及其它的吊运。
承重索采用φ26mm钢丝绳,分别锚固于塔顶门架间及其锚梁门架间,其矢跨比选择与主缆线形基本一致。
承重索上安装3t开口滑车作跑马滑车,滑车下悬挂2t手拉葫芦用于调整主缆索股的锚头与滑道的间距,让锚头始终高于滑道20~30cm,布置如下图示。
开口滑车承重绳手拉葫芦锚头牵引绳牵引绳滑轮索股猫道3.索股的牵引工艺流程架设准备索股吊放在放索支架上架架锚头吊挂在索道上并与牵引绳连接驱动牵引系统锚头连同索股沿索道及猫道前进两端锚头分别引入索管4. 索股的牵引1)首先通过牵引索携持主缆索股,从放束场出发向另一侧行进,牵引速度以15m/min左右为宜,牵引最初几根索时,要降低牵引速度。
列车牵引计算系统设计

摘
要 :以 系统 功 能和 数 据 管理 为 出发 点 , 构造 列 车 牵 引计 算
个 子 系统 。 每 一 个子 系 统设 计 完 将 成一个相对独立 的功能 , 解决 一 个 单 一 的 问题 , 后 将 若 干 个 子 系 统 然
的 各个子系统 , 并对 各个子 系统 的功 能作了诠释 。 依据 系统数 据的 处理过程 , 将列车牵引计算系统 , 设计 为数据管理 系统 、 牵引计算处 理 系统 、 界面 系统3 个子 系, 再分别针对3 个子 系统 的功能特 点作进
统 的相 互 关 系 。
路 数 据 的 管 理 ; 解 算 列 车 的 运 行 大 , 据 量 多 的 特 点 。根 据 牵 引计 数
随 着 网络 技 术 的 发 展 , 以 预 速 度 、 行 时 分 、 引 质量 、 动 距 算所 需 的数 据 类 型 的不 同又 可 以将 可 运 牵 制
维普资讯
文章 编号 :10 — 4 1 070 — 0 3 0 0 3 12( 0 )8 08 - 3 2
中图分 类号 :U 6 .3 2 0 1
文献 标识 码 :B
列车 牵 引计算 系 统设 计
廖 勇
( 西南交通 大学 交通运输 学院 ,四川 成都 603) 10 1
统 3 子 系 统 。 对 于 这 3 子 系 统 个 个
列J ̄g 引 辑 g N
各 个 工种 、 项 工 作 的 组 织 、 调 又可 以按 照要 完成 的功 能 和 求解 问 各 协
和 优 化 。铁 路 的 调 度 指 挥 、 息 传 题 的具 体 需 要 , 设 计 为 1 个 次 级 信 再 4
高铁列车牵引系统的设计与优化
高铁列车牵引系统的设计与优化随着科技的不断发展和人们对高速出行需求的增加,高铁列车成为了现代交通运输领域的重要组成部分。
而其中的牵引系统,则是确保高铁列车行驶正常、高效的关键要素之一。
本文将探讨高铁列车牵引系统的设计与优化,力求为高铁运营的发展提供一定的指导和思路。
一、牵引系统的类型及特点高铁列车的牵引系统分为传统的机械式牵引系统和现代电力式牵引系统两种类型。
机械式牵引系统采用内燃机或柴油发动机作为动力源,通过传动装置与轮轴相连,实现列车的牵引和推动。
电力式牵引系统则主要依靠电能转化为动力,通过电机驱动轮轴旋转,从而推动列车前进。
机械式牵引系统相对简单实用,但存在燃料消耗高、污染大等问题。
而电力式牵引系统具有环保、高效等优点,逐渐成为了高铁列车牵引系统的主流选择。
电力式牵引系统随着科技的进步和创新的不断推动,不断减小了体积、提高了效率,并逐渐实现了全电力驱动。
二、牵引系统的设计要点1. 动力适应性:高铁列车牵引系统的设计必须充分考虑列车在不同速度、负载和环境条件下的动力需求。
牵引系统应具有良好的动力适应性,以保证在各种运行条件下能够提供稳定、高效的动力输出。
2. 能量回收:高铁列车在制动过程中产生的能量大部分以热能的形式散失。
为了提高能源利用效率,牵引系统需要具备能量回收功能,将制动过程中产生的能量储存起来,用于供给列车运行过程中的动力需求。
3. 安全性与可靠性:高铁列车运行速度高,对其牵引系统的安全性和可靠性要求极高。
牵引系统的设计应充分考虑各种运行异常情况,确保列车在发生故障时能够及时切换到备用系统,保证列车安全平稳停车,减少事故发生的可能性。
4. 操控性与人机交互:高铁列车的操控性与人机交互系统也是牵引系统设计中的重要方面。
操控系统应该简洁、直观,方便驾驶员操作和监控,并能及时反馈列车的运行状态和问题,提供准确的信息支持,确保高铁列车的安全高效运行。
三、牵引系统的优化措施1. 轻量化设计:通过采用新材料、新工艺和优化设计等手段,减轻牵引系统的自重,提高列车的牵引功率重量比。
工程车辆牵引力及发动机转速实时测量系统设计与实现

K e y w o r d s :e n g i n e e r i n g v e h i c l e ; t r a c i t o n ; e n in g e s p e e d ; t r a c t i o n p e a k v a l u e ; f o ce r - s p e e d c u r v e ; m e c h a n i c l a p a r me a t e r m a t c h i n g
・
工 程 车辆 的 整体 重 量 、 重 量分 配 以 及 发 动 机 与 传 动 系 的 合 理 匹配 是 影 响 车 辆 动 力 和 燃 油 的直 接 影 响 因素 ,通 过 现 有 车 辆 称 重 系统 ,可 以 实现
v a l u e i n a c c e s s i o n l a ma na g i n g s o f t wa E  ̄ Me n wh a i l e i t i s a b l e t o d r a w he t g r a p h o f F o r c e - S p e e d c u r v e , wh i c h wi l l p r o v i d e e v i d e n c e f o r
力3 1 【 文献标识码】 B 【 文章编号】1 O 0 3 — 5 7 2 9 ( 2 0 1 7 ) 0 6 一 O 0 3 6 — 0 7
De s i g n a n d i mp l e me n t a t i o n o f t h e me a s u r i n g s y s t e m f o r e n g i n e e r i n g v e h i c l e t r a c t i o n a n d e n g i n e s p e e d Ar t i c l e a b s t r a c t :T r a c t i o n a n d e n g i n e s p e e d a r e t w o k e y i n d e x e s t o e v a l u a t e t h e e n g i n e e r i n g v e h i c l e s ’d y n a mi c p e f r o r ma n c e .I n c o n s i d e r a t i o n o f he t a c t u a l me a s u in r g d e ma n d f r o m he t v e h i c l e ma n u f a c t u r e r a n d u s e r s , a n d he t c u r r e n t s i t u a i t o n ha t t he t t w o f u n c t i o n s c o u l d
轨道交通牵引电机智能综合测试系统设计

开发了城市轨道交通 变频电机
试系统,
了不同 工况下的空载和负载试
验⑸。
提了 新型城轨用 电机
动性能的试验方法,得 了 190 kW城轨用交
流变
电机的 、制动性能测试参数及性能
试曲线⑹。丹运用 电机
动轴报警检
) 测系统,
了电机振动检测(7 。 京交通大学魏
星原
于旋转变压器的电机转速与转 量技
( ) ,实现了 电机转速/转角的测量 8 。 海电机
文献标志码:A
文章编号:1001-6848(2021)06-0071-05
Design of Intelligent Compretensive Test System for Traction Motor in Rail Transit
XIE Yongchao1,2, WU Canhui3, YAN Jun1,2,LI Huabo1,2 (1. School ef Informatioo Scnncc and Engineering,Central South Unjersj,Changsha 410083,China ;
针对轨道交通牵引电机的检修与维护需求,轨
道交通 电机智能综合测试系统(如图1所示)包
系统 电 、 交流电
机 、 试电机
及四象限变
和 系统 ( 系统 和
采
)% 试电机及四象限变
的
采用四象限变 (M700-10403200D/200kVA)交流
母线回馈的方
能量回收,实现能量的循环
用%
轨道交通 电机 能 合 试系统的工 原
2. School O Control,Hunan Railway Professional Technology College,Zhuzhoo Hunan 412001,China ; 3. Hunan Xinee Intelligenr Technolofy Co., Ltr.,Zhuzhoo Hunan 412001,China)
机车车辆牵引性能测试系统的设计及应用
机车车辆牵引性能测试系统的设计及应用发表时间:2018-08-10T15:27:47.627Z 来源:《科技中国》2018年4期作者:卢波 马子奕 尹昱松 [导读] 摘要:机车车辆牵引性能测试系统是一种在列车制成后和投入运行前进行列车牵引性能试验的测试平台。
在轨道交通领域,尤其是城轨和动车组列车,牵引性能测试对整车的性能测试有着至关重要的意义,本文主要介绍了便携式牵引性能测试系统的设计方案及在城轨列车型式试验中的应用。
摘要机车车辆牵引性能测试系统是一种在列车制成后和投入运行前进行列车牵引性能试验的测试平台。
在轨道交通领域,尤其是城轨和动车组列车,牵引性能测试对整车的性能测试有着至关重要的意义,本文主要介绍了便携式牵引性能测试系统的设计方案及在城轨列车型式试验中的应用。
关键词:牵引性能测试;便携式设备;轨道交通1系统功能介绍机车车辆牵引测试系统是在动车及城轨列车上安装设备进行试验测试的平台。
针对被测列车的各种类型信号进行数据采集,采集接触网电压、接触网电流、变流器中间直流电压、变流器输入电压、变流器输入电流、电机电压、电机电流、列车速度、各动轴速度、牵引电机出风口温度、辅助变流器的输出电压、辅助变流器的输出电流等。
2方案设计2.1方案概述本测试系统采集设备核心技术采用NI(美国国家仪器有限公司,National Instruments,简称NI)的cRIO设备,系统为LabVIEW RT实时操作系统,支持本地快速存储,快速逻辑控制等。
LabVIEW是一种程序开发环境,由美国国家仪器(NI)公司研制开发,LabVIEW使用的是图形化编辑语言G编写程序,产生的程序是框图的形式[1]。
LabVIEW软件是NI设计平台的核心,也是开发测量或控制系统的理想选择。
LabVIEW开发环境集成了工程师和科学家快速构建各种应用所需的所有工具,旨在帮助工程师和科学家解决问题、提高生产力和不断创新。
动车组牵引系统的试验系统设计
摘要为了研制和生产符合国情的交流传动系统,对系统和部件进行比较全面和深入的试验研究也是重要的一环。
这就需要对交流传动系统的变流器、交流牵引电机、变流器控制系统以及轨道动车的全车控制进行功率试验和性能测试。
首先介绍了国产CRH2型动车组基本结构、内部供电系统模型。
然后提出了现在国内两种基本的试验平台,能量消耗型和能量互馈型交流传动试验平台。
在确定交流传动试验平台的主要参数之后,对能量互馈型试验平台元部件进行了选型。
最后选取了消耗型的大功率交流传动系统试验平台进行了仿真。
仿真中,选取基于转差频率的矢量控制策略对异步电机进行调节,用调节直流发电机所带的负载,来间接调节异步电机的负载转矩,以起到模拟负载的效果。
仿真结果表明:能量消耗型试验平台仅对于一些小功率的传动平台是极其有效的,设计与系统仿真与既有的大功率交流传动系统实验平台相符合。
在交流调速就要大范围的取代直流调速的背景下,设计多元功能的交流传动试验平台具有明显的实际意义。
关键词:交流传动系统;试验平台;矢量控制;模拟负载AbstractFor the purpose of developing and producing AC drive system which appropriate to national conditions, the study of systems and components in a comprehensive and deeply way is also an important part. Power testing and performance testing on AC drive inverter, AC traction motor, converter control system and a rail car full vehicle control are needed.As domestic basic test platform, the basic structure and internal power supply system model of domestic CRH2 type EMU are introduced firstly, power-consuming and power-feed AC drive test are raised. The type of component parts on reciprocal power-feed test platform is chosen after the main parameters of AC drive test platform are determined. Finally, power- consuming AC drive test platform is selected to simulation. Based on slip frequency vector control strategies is selected to adjust synchronous motors, meanwhile, by adjusting the load of DC generator, the load torque on asynchronous motors is regulated indirectly which plays a load effect in the simulating.Simulation results show that: power-consuming test platform is extremely effective only for some small power transmission platform, design and system simulation with existing is consistent to high-power AC drive experimental platform. In the trend of AC drive will replace DC converter with a wide range, design on AC drive test platform with multiple functions has obvious practical significance.Key Words: AC drive system, Test platform, Vector control, Simulated load目录摘要 (I)Abstract (II)目录 (III)1 绪论 (1)1.1 课题背景及意义 (1)1.2 课题发展现状 (1)1.3 课题的设计内容和目标 (1)2 动车组牵引电传动系统的试验系统理论分析 (2)2.1 CRH2型动车组 (2)2.1.1 CRH2型动车组简介 (2)2.1.2 动车组电传动系统主电路参数 (2)2.2 牵引电传动试验系统的理论分析 (4)2.2.1 试验系统概述 (4)2.2.2 试验系统结构设计 (5)2.2.3 试验系统主要设备 (5)2.2.4 试验系统主电路设计 (7)3.1 试验系统模块仿真设计 (11)3.1.1 转速PI调节设计 (11)3.1.2 函数运算设计 (12)3.2 试验平台仿真运行及结果 (13)3.2.1 试验系统仿真设计 (13)3.2.2 试验系统仿真结果 (15)3.3 仿真结果分析 (17)结论 (19)致谢 (20)参考文献 (21)1 绪论1.1 课题背景及意义在我国,高速动车组的发展正处于新兴阶段。
负载牵引测试系统--放大器设计
13
超高反射系数的谐波阻抗自动匹配
传统负载牵引测试系统设置
14
超高反射系数的谐波阻抗自动匹配
噪声系数
N O I S E
•
Determines The four Noise Parameters • Minimum noise figure
• • •
Real Γs
负载匹配器控制阻抗
• • • 机械式 固体物理式 主动调谐 – 增益被动式 – 使用电流-电压传感负载匹配器简化后的主动 调谐
7
超高反射系数的谐波阻抗自动匹配
Applications
150:1 200 W LDMOS Loadline
HGT Series
On-Wafer Noise GSM Loadline
Fmin
F I G U R E
Real part (magnitude) of optimum Z,Y, or Γ Imaginary Part (angle of ) optimum Z,Y, or Γ Equivalent noise resistance
F = Fmin + Rn/Gs⏐Ys-Yopt ⏐ F= Fmin + 4rn ⏐ Γs - Γopt ⏐
43
超高反射系数的谐波阻抗自动匹配
HGT参于的主波,谐波匹配
Γ1
= .96 < 180°
Γ2
= .96 < -133.6°
44
超高反射系数的谐波阻抗自动匹配
HGT参于的主波,谐波匹配
Γ1
= .96 < 180°
Γ2
= .96 < -90.1°
45
地铁牵引功率模块测试系统设计
地铁牵引功率模块测试系统设计王泉;李旭光【摘要】地铁牵引系统主要由牵引逆变器提供动力,牵引功率模块是其中的核心主电路部分.介绍了一种地铁牵引系统功率模块测试系统设计思路及参数计算,给出了测试系统的硬件和软件设计方法.通过静态脉冲测试和动态脉冲测试可以看出,设计的测试系统可较为精确地测量到地铁牵引逆变器功率模块每个桥的桥臂IGBT(绝缘栅双极晶体管),且其实测值与理论计算值接近.该测试系统较为适合现场测试和验证功率模块的整体性能.【期刊名称】《城市轨道交通研究》【年(卷),期】2016(019)007【总页数】5页(P56-59,64)【关键词】地铁;牵引系统;牵引功率模块;测试系统【作者】王泉;李旭光【作者单位】上海交通大学电气工程系,200240,上海;上海地铁电子科技有限公司,200233,上海;上海交通大学电气工程系,200240,上海【正文语种】中文【中图分类】U266.291+.7First-author′s address Shanghai Jiaotong University,200240,Shanghai,China 地铁牵引系统主要由牵引逆变器提供动力,而牵引功率模块又是其中的核心主电路部分。
随着地铁车辆逐渐进入架修和大修阶段,功率模块的维修显得越来越迫切和必要,因此,需要建立一套能验证功率模块性能的测试系统。
本文提出了一种测试方法解决方案,以提高功率模块维修质量。
图1所示为目前通用的直流母线地铁牵引系统功率模块组的主电路结构,牵引逆变器负责输出三相变频变压的交流电流,以驱动牵引电机带动地铁列车运行;另一相RC在车辆进行电制动接触网网压过时高做主动能量消耗。
2.1 主电路电气架构设计采用开环控制,以进行牵引系统动力模块的饱和电流测试及轻载动态输出试验。
测试系统主电路如图2所示。
因牵引逆变器所带为电机负载,而目前牵引电机多为Y型连接的感应电机,所以在此简化了模型。
考虑到对每相桥臂进行测试,将每相负载看成为感性负载[1],如图2中的负载2。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2 测功系统设计
牵引式测功系统是将阻力加装装置安装在专用底盘上,并通过加 载不同阻力值来实现对被试装备不同行驶负荷的功率测试。当进行底 盘功率测试时,将牵引式测功系统刚性连接在被试装备后面,通过施 加预期行驶状态下的阻力来模拟对应的行驶负荷,以达到在平坦路面 测试装备在特定行驶状态下的底盘功率状态的目标。牵引式测功系统 与被试装备组成的底盘功率测试系统如图 1 所示。
105
电子技术
牵引式测功系统设计
陈明明 , 晁智强 (陆军装甲兵学院机械工程系 , 北京 100072)
摘 要:以装甲装备牵引式测功系统为研究对象,针对原有测功方法无法准确有效地测量履带式装甲装备的底盘输出功率的问题,提出了集底 盘加载测量和远程监控管理控制等功能于一体的总体方案,并对底盘加载测量系统和测控系统等子系统进行了设计分析,最后进行了牵引式测 功系统在测试装甲装备底盘输出功率方面的有效性和准确性。 关键词:装甲装备;测功系统;底盘 DOI:10.16640/ki.37-1222/t.2017.24.093
装 备 额 定 扭 矩 工 况 下 实 测 底 盘 输 出 功 率 与 理 论 值 的 比 值 为 85.2%。 Pd实 = Pl + Pf + Pfg = 41.5 + 19.4 + 4.4 = 65.3kW (1) η = d实 × 100% =
图 4 实验系统构成及场地 按照上述测试步骤,进行了三次试验,当试验结果达到稳态后, 各参数测试数据的均值如表 1 所示。 表 1 实车测试数据 试验次数 1 2 3 牵引力(N) 速度(km/h) 功率(kW) 5671 25.9 40.8 5683 25.4 40.1 5952 25.1 41.5
1 引言
装甲装备作为集机动、防护和火力于一身的优异作战平台,一直 是陆军作战体系中的支撑力量。而作为衡量装备技战术指标之一的动 力性能,由于装甲装备的结构特点,特别是履带式装甲装备,难以采 用汽车领域常用的滚筒式的检测方法来测试装备的底盘输出功率,现 今只能采用定性的道路测试评估和原地无负荷测试的方法来进行装备 的功率测试。但这些测试方法极其容易受到包括场地、主观判断和经 验等因素的影响,无法有效保证测试结果的准确度,严重制约着装备 性能状态评估和制定维修保障计划等工作的有效开展 [1-3]。因此,有必 要对履带式装甲装备的测功技术进行研究,研制能够实现对装备底盘 输出功率快速准确的不解体测试技术,以便开展对装备动力性能的有 效评估,准确掌握装备的性能状态。
图 3 测控系统构成示意图
3 实验分析
试验测试研究是为检验所研制的测功系统的可行性和有效性,并 开展了以某型步兵战车为被试装备的测试试验,实现了该测功系统对 履带式装甲装备底盘输出功率的有效测量 [5-6]。在完成台架及叉车牵 引控制误差实验之后,利用测功机对某型号装甲车装备进行功率测 试,设定装备额定扭矩工况为直接档工况(IV 档),速度控制目标为 25km/h。待测功机达到稳态后,对实测底盘输出功率与理论值的比值 进行记录,对车辆的动力性状况进行分析。装甲装备牵引实验系统和 场地环境如图 4 所示。
P Pd理 65.3 85.2% (2) × 100% = 76.6
式中: Pd实 为实际底盘的输出功率; Pd理 为理论底盘的输出功率; Pf 为测装备行驶的阻力功率; Pfg 为挂车行驶的阻力功率。 (下转第 103 页)
103
种调制技术的优点完美融合在一起。这种优化的脉冲调制就称为脉冲 边沿调制技术,可实现即使在 100% 负载时,也能在电机端获得 100% 输入电源电压而无任何副作用(如电机中的谐波和附加损耗),变频 器损耗同时也会降低。 在锡铁山项目中,现场产生的各种开关信号通过变频器控制单元 (CU320-2DP 或者 CU240-DP)的 IO 接点传送给变频器,并控制变 频器的启停。 DCS 则通过 Profibus-DP 通讯接口与变频器控制单元通讯, 读取变频器的状态和控制变频器的启停,同时对变频器进行调速。就 地 IO 信号控制和远程 DCS 控制方式则可以通过现场控制箱上的远程 / 就地选择开关进行切换。 3.3 软启动器电气控制系统设计 软启动器是一种集电机软起动、软停车、轻载节能和多种保护功 能于一体的电机控制装置,国外称为 Soft Starter。软启动器采用三相 反并联晶闸管作为调压器,将其接入电源和电动机定子之间。这种电 路如三相全控桥式整流电路。使用软启动器启动电动机时,晶闸管的 输出电压逐渐增加,电动机逐渐加速,直到晶闸管全导通,电动机工 作在额定电压的机械特性上,实现平滑启动,降低启动电流,避免启 动过流跳闸。待电机达到额定转数时,启动过程结束,软启动器自动 用旁路接触器取代已完成任务的晶闸管,为电动机正常运转提供额定 电压,以降低晶闸管的热损耗,延长软启动器的使用寿命,提高其工 作效率,又使电网避免了谐波污染。软启动器同时还提供软停车功能, 软停车与软启动过程相反,电压逐渐降低,转数逐渐下降到零,避免 自由停车引起的转矩冲击。 在本项目中功率 >30kW 的浮选机以及皮带运输机全部采用软启 动器控制。 3.4 对于皮带运输机以及重板给料机的响铃保护 对于皮带运输机以及重板给料机等具有裸露运动部件的设备,必 须在开机运行之前让人员远离运动部件,以保护人员不受伤害。因此 对于这些设备都设计有发讯警示信号。 当需要对设备进行开机操作时, 首先发出发警示信号,警示信号接安装于现场的声光报警器,声光报 警器动作至少 15 秒之后,才允许对设备进行开机操作。
图 1 底盘功率测试系统 牵引式测功系统主要用于测量装甲装备的实际底盘输出功率,而 其测量是通过在被试装备后面牵引测功系统来实现的,因此测功系统 需要专业的底盘来承载包括加载装置、测量装置和测控系统等在内的 诸多设备 [4]。为实现对不同工况和不同装备的实时有效地测试,需要 加载不同的阻力来模拟不同的行驶负荷,因此需要相应的测控系统来 精准地控制加载阻力。测试时,测功系统被牵引在装甲装备后面,操 作人员则在合适地点对系统进行控制,因此需要对应的远程监控管理 系统和通讯系统,以实现对试验系统的有效管控。故根据测试系统的 以上要求,将牵引式测功系 统设计为包括底盘加载模 块、测控模块、通讯模块、 远程监管模块和操作引导模 块在内的诸多子系统的综合 集成测量控制系统,其顶层 设计结构图如图 2-3 所示。 底盘加载系统的结构示意图 和测控系统的构成示意图分 别如图 2 和图 3 所示。 图 2 测功系统结构构成示意图