15-基于Matlab_Simulink的直接转矩控制系统仿真研究
MATLAB和Simulink环境下控制系统的动态仿真
MATLAB 和Simulink 环境下控制系统的动态仿真袁亮亮 机械设计制造及其自动化082班 08556233摘要:文章着重阐述可在MA TLAB 和Simulink 环境下对实际控制对象的动态仿真过程和意义,同时对两种仿真方法进行了比较。
关键词:控制系统;动态仿真;MA TLAB ;Simulink生产过程自动化是指在轻工、纺织、电力、化工、冶金等生产中,对于温度、压力、流量、液体或流体的成分等变量实现自动控制、自动检测。
生产过程自动化在国名经济中起着重要的作用,它是提高劳动生产率,降低能源消耗、改善劳动条件的重要手段,也是现代化企业的重要标志之一为克服实训设备的缺乏或条件的局限,高职院校在培养专业人才上不仅应该重视理论知识,更要大力培养学生对于实际控制系统运行的分析、操作能力。
而MA TLAB 作为当前国际控制界最流行的面向控制与科学计算机的高级语言,以及MA TLAB 环境下的Simulink 是一个用于系统建模、仿真和分析的最强大/最优秀、最容易掌握的软件,对于提高学生的知己控制系统的运行、分析、处理能力大有益处,同时节省大量实训设备的投资,可以起到事半功倍的效果。
1. MALAB 仿真图框及仿真程序MA TLAB 是目前国际最流行的控制系统计算机辅助设计的软件工具,广泛应用于控制界、生物医学界、语言处理界、图像信号处理、雷达工程、信号分析、计算机技术等领域。
用MALAB 编程运算与人进行科学计算的思路和表达方式完全一致,尤其进行数学运算非常方便;MALAB 工具箱功能强大,即使没有C 或FORTRAN 程序设计语言的基础,也可以设计出功能强大、界面优美、稳定可靠的高质量程序,而且编程效率和计算效率极高。
以实验室锅炉模型的液位自动控制系统为例加以讨论,其数学模型为20.08() 2.03G s s s =+按10:1衰减曲线法(使用simulink 仿真)整定PID 调节器的参数,其传递函数确定为,其单位阶跃响应曲线用MA TLAB 仿真图1所示图1 锅炉液位MA TLAB 仿真曲线MA TLAB 程序:%picontrolr=1;num1=[182.0 8.3];den1=[22 0];num2=[0.08];den2=[2.03 1 0];[num3 den3]=series(num1,den1.num2,den2);[num den]=cloop(num3,den3);[A b c d]=tf2ss(num,den);Tf=input(‘仿真时间Tf=’);h=input(‘计算步长h=’);1()8.3(1)22C G s s =+x=[zeros(length(A),1)];y=0,t=0;for i=1:Tf/hk1=A*x+b*r;k2=A*(x+h*k1/2)+b*r;k3=A*(x+h*k2/2)+b*r;k4=A*(x+h*k3)+b*r;x=x+h*(k1+2*k2+2*k3+k4)/6;y=[y;c*x];t=[t;t(i)+h];endplot(t,y)其中:Tf=25H=0.02从系统运行的仿真结果看,基本达到设计要求。
15-基于Matlab_Simulink的直接转矩控制系统仿真研究
(7)
3.2.2 磁链与转矩滞环调节模块
磁链允许容差通过定义施密特触发器的上下触 发点来设置,输出 sf (0 或 1)即磁链滞环调节器的输 出状态量。图 4 所示为定子磁链滞环调节模块。
如图5所示为转矩滞环调节子系统,其中ωr、ωr* 分别为观测所得转速和给定转速参考值,将其 PI 调 节后得到给定转矩和实际转矩。转矩滞环调节的输 出状态量 ST 有两种状态值,分别为 1 和 0,将 PI 调 节得到的给定转矩和实际转矩的差值与容差逻辑比 较,即可得到 ST 的值,在查电压矢量最优开关表时
从图 6 圆形磁链轨迹可明显看到电压矢量在
图 7 相电流波 图 8 电磁转矩曲线
图 6 圆形磁链轨迹
图 9 电机转速曲线 【下转第 172 页】
第 32 卷 第 1 期 2010-1 【109】
西门子重磅出击亚洲版 SPS —— SIAF GUANGZHOU
SIAF GUANGZHOU 中国广州国际工业自动 化技术及装备展览会,是全球最大自动化展—— “SPS/IPC/DRIVES 电气自动化展”与华南著名工 控展——“CHIFA 中国(广州)国际工业控制自动 化及仪器仪表展”在中国的完美结合,2010 年 3 月 8~11 日在广州琶洲展馆举办。经过资源整合,展会 将借鉴 SPS 成功办展经验和营销模式投入运行。
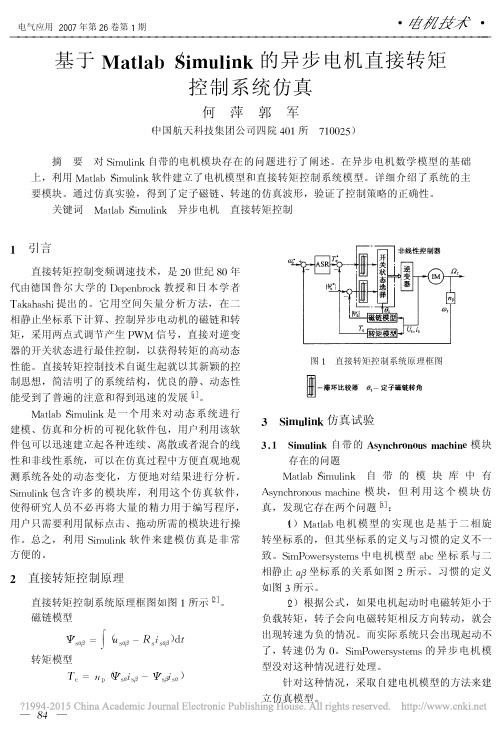
直接转矩控制与矢量控制的区别是,它不是通 过控制电流、磁链等变量间接控制转矩,而是用空 间矢量的分析方法,以定子磁场定向方式,对定子 磁链和电磁转矩进行直接控制[3]。该技术采用 Bang - Bang 控制从而可得到快速的转矩响应,并且由于 控制性能不受转子参数影响,所以可提高系统鲁棒 性,省去了旋转变换和电流控制,则可简化控制器 的结构。
基于MATLAB的直接转矩控制系统的仿真研究答辩稿
9/19/2014
谢谢
4. 分析圆形磁链轨迹DTC,并建模和仿真。
二. 异步电机数学模型
无论异步电机是 绕线式还是鼠笼 式,都将它等效 成绕线转子,按 照折算前后的转 子每相匝数都相 等的原则折算到 定子测。
异步电机物理模型
1.电压方程
uA Rs uB Rs uC = Rs Rs u a ub Rs Rs uc
五、六边形磁链直接转矩控制系统结构
六边形磁链控制系统结构图 19
六、圆形磁链直接转矩控制系统
在六边形磁链轨迹直接转矩控制中,每1/6控制周期磁链开关一次, 导致低速时转矩脉动大。减小转矩脉动,是使磁链轨迹接近圆形的 方法。一种有效的方法是通过合理选择非零电压空间矢量和零电压 空间矢量的顺序和其给出时刻,将定子磁链的幅值变化限制在一定 的容差范围内,进而获得旋转的圆形磁链轨迹。
iA iB iC ia ib ic
LAA、LBB、LCC、Laa、Lbb、Lcc 是各相绕组的自感,其余为互感。
3.转矩方程
Te pisT Msr ir PMsr (iAia iBib iCic)sin (iAib iBic iCia ) sin( 120) (iAic iBia iCib) sin( 120)
三相坐标系下和两相坐标系下的数学模型
四、直接转矩控制的基本原理
T 由运动系统的运动方程式得, 其中 Te 为电磁 Te 为系统惯性常数。若改变 转矩, GD 为负载转矩, 的 大小,则可以改变加速度的大小,从而改变速度的大小。 由此可知,调速系统究其根本是控制转矩。
L
2
基于MATLAB_Simulink的永磁同步电机直接转矩控制仿真建模
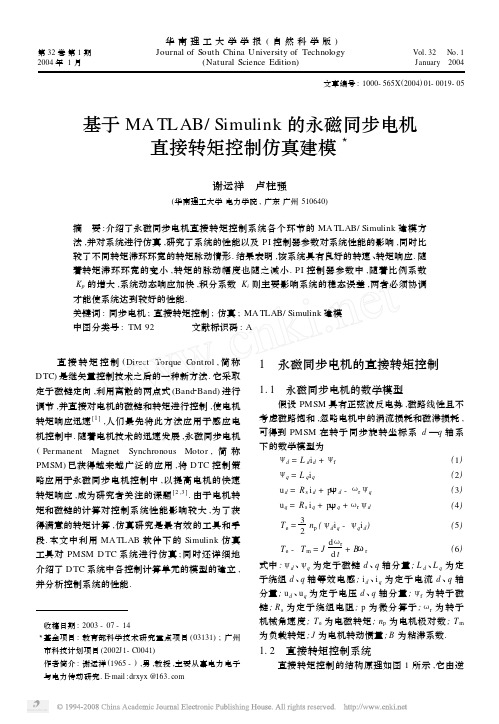
收稿日期:2003-07-143基金项目:教育部科学技术研究重点项目(03131);广州市科技计划项目(2002J1-C0041) 作者简介:谢运祥(1965-),男,教授,主要从事电力电子与电力传动研究.E2mail:drxyx@ 文章编号:1000-565X(2004)01-0019-05基于MA TLAB/Simulink的永磁同步电机直接转矩控制仿真建模3谢运祥 卢柱强(华南理工大学电力学院,广东广州510640)摘 要:介绍了永磁同步电机直接转矩控制系统各个环节的MA TLAB/Simulink建模方法,并对系统进行仿真,研究了系统的性能以及PI控制器参数对系统性能的影响,同时比较了不同转矩滞环环宽的转矩脉动情形.结果表明,该系统具有良好的转速、转矩响应.随着转矩滞环环宽的变小,转矩的脉动幅度也随之减小.PI控制器参数中,随着比例系数K p的增大,系统动态响应加快,积分系数K i则主要影响系统的稳态误差,两者必须协调才能使系统达到较好的性能.关键词:同步电机;直接转矩控制;仿真;MA TLAB/Simulink建模中图分类号:TM92 文献标识码:A 直接转矩控制(Direct Torque Control,简称D TC)是继矢量控制技术之后的一种新方法.它采取定子磁链定向,利用离散的两点式(Band2Band)进行调节,并直接对电机的磁链和转矩进行控制,使电机转矩响应迅速[1],人们最先将此方法应用于感应电机控制中.随着电机技术的迅速发展,永磁同步电机(Permanent Magnet Synchronous Motor,简称PMSM)已获得越来越广泛的应用,将D TC控制策略应用于永磁同步电机控制中,以提高电机的快速转矩响应,成为研究者关注的课题[2,3].由于电机转矩和磁链的计算对控制系统性能影响较大,为了获得满意的转矩计算,仿真研究是最有效的工具和手段.本文中利用MA TLAB软件下的Simulink仿真工具对PMSM D TC系统进行仿真;同时还详细地介绍了D TC系统中各控制计算单元的模型的建立,并分析控制系统的性能.1 永磁同步电机的直接转矩控制1.1 永磁同步电机的数学模型假设PMSM具有正弦波反电势,磁路线性且不考虑磁路饱和,忽略电机中的涡流损耗和磁滞损耗,可得到PMSM在转子同步旋转坐标系d—q轴系下的数学模型为ψd=L d i d+ψf(1)ψq=L q i q(2) u d=R s i d+pψd-ωrψq(3)u q=R s i q+pψq+ωrψd(4)T e=32n p(ψd i q-ψq i d)(5) T e-T m=Jdωrd t+Bωr(6)式中:ψd、ψq为定子磁链d、q轴分量;L d、L q为定子绕组d、q轴等效电感;i d、i q为定子电流d、q轴分量;u d、u q为定子电压d、q轴分量;ψf为转子磁链;R s为定子绕组电阻;p为微分算子;ωr为转子机械角速度;T e为电磁转矩;n p为电机极对数;T m 为负载转矩;J为电机转动惯量;B为粘滞系数. 1.2 直接转矩控制系统直接转矩控制的结构原理如图1所示,它由逆华南理工大学学报(自然科学版)第32卷第1期Journal of South China University of Technology Vol.32 No.1 2004年1月(Natural Science Edition)January 2004变器、PMSM 、磁链估算、转矩估算、转子位置估算、开关表和调节器等组成.控制系统将电机给定转速和实际转速的误差,经调节器输出给定转矩信号;同时系统根据检测的电机三相电流和电压值,利用磁链模型和转矩模型分别计算电机的磁链和转矩大小,计算电机转子的位置、电机给定磁链和转矩与实际值的误差;然后根据它们的状态选择逆变器的开关矢量,使电机能按控制要求调节输出转矩,最终达到调速的目的.图1 直接转矩控制系统框图Fig.1 Block diagram of direct torque controlsystem在实际的直接转矩控制系统中,需要采样电机的三相电流,且需进行坐标变换以便于计算.各坐标变换关系如图2所示.图2 坐标变换矢量图Fig.2 Vector diagram of different reference flame坐标变换公式为x αx β=231 -12 -12・x ax bx c (7)x αx β=cos θ -sin θsin θ cos θ・x d x q(8)式中:x α、x β表示α—β坐标系变量;x a 、x b 、x c 分别表示abc 坐标系变量.在两相α—β坐标系下,电机定子磁链在α—β轴上的分量ψα和ψβ可表示为ψα=∫(u α-R s ・i α)d t (9)ψβ=∫(u β-R s ・i β)d t(10)式中u α、u β、i α、i β分别为电机电压和电流在α—β坐标轴的分量,而定子磁链的位置则可通过α—β轴的分量和它们的正负号来决定.由式(5),(8)可以推导出α—β坐标系的转矩估算公式如下:T e =32n p (ψαi β-ψβi α)(11)前面已经介绍过,D TC 系统是根据电机的转矩误差状态、磁链误差状态和磁链位置来选择逆变器的开关信号.如果将逆变器的开关状态也进行定义,设逆变器桥臂上管导通时定义为状态“1”,下管通时定义为“0”,则三相桥臂上的开关S a 、S b 、S c 共有8种状态组合,其中6个非零电压矢量V 1~V 6和两个零电压矢量V 0、V 7的分布如图3所示.当施加电压矢量与ψs 夹角小于π2时,将使磁链幅值增加;当大于π2时,磁链幅值减小.当电压矢量超前于ψs 时,转矩增加;落后于ψs 时,转矩减小.图3 电压矢量和区段划分Fig.3 Voltage vectors and zoning用<、τ分别表示电机磁链和转矩的给定值和实际值的误差状态,当给定值比实际值大时状态为1,否则状态为0,则由<、τ的状态以及磁链所处分区的位置,便可按表1选择开关电压矢量.表1中的S 是为了便于在Simulink 中实现查表而设置的一个变量S =2<+τ+1(12)表1 直接转矩控制系统开关表Table 1 Switching table for DTC systemS <τθ1θ2θ3θ4θ5θ6411V 6V 2V 3V 1V 5V 4310V 5V 4V 6V 2V 3V 1201V 2V 3V 1V 5V 4V 61V 1V 5V 4V 6V 2V 320 华南理工大学学报(自然科学版)第32卷 2 系统仿真模型的组建在PMSM D TC 仿真系统中,主要使用Simulink 库和PSB (Power System Blockset )库中的模块.本研究的仿真模型是基于MA TLAB 6.1/Simulink 4.1上构建[4].2.1 仿真系统利用Simulink 搭建图1的仿真模型如图4所示.它包括3/2变换、磁链估算和转矩估算等子系统.进行磁链估算时,磁链初值不宜为0,否则仿真会出错.因此在磁链估算子系统中,要给积分模块(Integrator )赋一个初值(Initial C ondition ),本文中设为0.01.图4 基于MA TLAB/Simulink 的PMSM DTC 系统的仿真模型Fig.4 Simulation model of PMSM DTC system based on MA TLAB/Simulink 在逆变器和PMSM 子模块间,接入电压测量装置以观测A 、B 相间电压,因为当Simulink 模块与PSB 模块相连时,要求接入一个电气测量模块,否则仿真会出现错误.2.2 区段判断的实现定子磁链矢量所在的区段我们可以根据磁链在α—β坐标上的分量进行判定,由ψα的正负确定定子磁链矢量的象限,再由αtan (ψβψα)决定定子磁链矢量的具体位置.其实现模块如图5所示.其中的MA TLAB 函数模块是用来调用MA TLAB 中求反正切的函数,开关模块是一个2选1的输出,其输出再经过图5(b )子系统便可以得到区段结果.表2为磁链位置所对应的区段值.2.3 转矩调节信号τ和磁链调节信号<在转矩控制系统中,转矩给定T 3e 是由速度环PI 控制器输出获得的.磁链和转矩的误差信号,按式(12)进行计算以后输出,磁链和转矩的误差信号的具体实现过程如图6所示.图5 磁链区段的确定Fig.5 Determining the sector of flux linkage表2 磁链区段和角度的关系T able 2 Relationship between flux linkage sector and delta角度区段角度区段[-π/2,-π/6)θ6[-π/6,π/6)θ1[π/6,π/2)θ2[π/2,5π/6)θ3[5π/6,7π/6)θ4[7π/6,3π/2)θ5 第1期谢运祥等:基于MA TLAB/Simulink 的永磁同步电机直接转矩控制仿真建模21图6 转矩和磁链误差信号Fig.6 Error signal of torque and flux linkage2.4 其他模型的建立按照以上相类似的方法,我们对逆变器及其驱动信号、坐标的变换、u α和u β的获取、电机磁链的估算和转矩的估算等等,建立相应的Simulink 模型,如图7所示.图7 PMSM DTC 仿真系统的其他子系统Fig.7 Other subsystems in the PMSM DTC systemsimulation model3 仿真结果及分析在仿真开始以前,可执行菜单S imulation —S imu 2lation Parameters 设定仿真参数.本系统的PMSM 参数设定为:定子电阻R s =3Ω,直、交轴的等效电感L d =L q =0.168H ,转子磁链ψf =0.175Wb ,转动惯量图8 转速、磁链轨迹和转矩的仿真结果Fig.8 Simulation results of rotation s peed ,flux linkagetrail route and torque22 华南理工大学学报(自然科学版)第32卷 J =0.0008kg ・m 2,粘滞系数B =0,极对数n p =2.在此基础上便可以仿真分析控制系统的性能指标以及各因素的影响.图8是直接转矩控制系统的电机磁链轨迹、转速、转矩波形.图9反映了转矩滞环宽度对转矩脉动的影响,减小滞环宽度,有利于降低转矩脉动幅度.图10是负载和给定转速突变时的转矩和转速波形,其结果表明系统在阶跃变化时能够自动保持稳定运行状态.表3是通过仿真研究得到的不同PI 参数对系统性能的影响.图9 转矩滞环环宽对转矩脉动的影响Fig.9 E ffect of torque hysteresis width on thetorqueripple图10 系统的转速、转矩响应Fig.10 Torque and rotation s peed response of the system表3 PI 控制器参数对系统性能的影响Table 3 E ffect of PI controller parameters on systemperformance序号积分系数K i比例系数K p饱和限幅值稳定时间/s 转速超调/%10.02 1.5[-1.6,1.6]0.0580.6320.02 2.0[-1.6,1.6]0.0250.6530.10 1.5[-3.0,3.0]0.113 6.2540.10 2.0[-1.6,1.6]0.0680.7550.502.0[-1.6,1.6]0.0400.114 结束语利用MA TLAB/Simulink 建立永磁同步电机直接转矩控制系统,可以从理论上研究控制系统的性能及其相关因素的影响,仿真结果和分析所得到的结论是可信的.在建立实际系统之前,通过仿真研究对控制系统进行充分论证,可以提高研究效率.参考文献:[1] T akahashi I ,Noguchi T.A new quick 2res ponse and high 2effi 2ciency control strategy of an induction m otor [J ].IEEE T rans on Industrial A pplications ,1986,22(5):821-827.[2] Zhong L ,Rahman M F.Analysis of direct torque controlin permanent magnet drives [J ].IEEE Transactions on Power Electronics ,1997,12(3):528-535.[3] 田淳,胡育文.永磁同步电机直接转矩控制系统理论及控制方案的研究[J ].电工技术学报,2002(2):8-11.[4] 王沫然.Simulink 4建模及动态仿真[M ].北京:电子工业出版社,2002.Simulation and Modeling of Direct Torque Control of Perm anent 2m agnet Synchronous Motor B ased on MAT LAB/SimulinkXie Y un 2xiang L u Zhu 2qiang(College of Electric Power ,S outh China Univ.of Tech.,Guan gzhou 510640,Guangdong ,China )Abstract :The modeling of direct torque control system of permanent 2magnet synchronous motor based on MA TLAB/Simulink was introduced ,and the simulation of the system was carried out to research on the effect of PI controller parameters on the system performances.Also ,the relationship between torque hysteresis loop ’s width and torque ripple amplitude was analyzed.The results show that the direct torque control system gives a good response to the rotation speed and torque ,and that the torque ripple amplitude decreases with the reduction of torque hysteresis loop ’s width.The PI controller parameters K p and K i should be properly matched to achieve excellent system performance ,for a large scaling factor K p will accelerate the system ’s dynamic response ,while the integral coefficient K i mainly influences the system ’s static error.K ey w ords :synchronous motor ;direct torque control ;simulation ;MA TLAB/Simulink modeling 第1期谢运祥等:基于MA TLAB/Simulink 的永磁同步电机直接转矩控制仿真建模23。
基于Matlab/Simulink的异步电机直接转矩控制系统仿真

a e gv n t r u h smu ai n tx . T e r s l r v d t a e me o s a al b e r i e o g i l t e t h e u t p e tt t d i v i l . h o s o h h h a
维普资讯
第
(
器a期 1) 3 m 6
(PSNP OEC I A I) E LI — O ER CN X OO R FLTC HE M
防 机 爆电
基 于 M t b Sm l k a a/ i u n 的异 步 电机 l i 直 接 转 矩 控 制 系 统 仿 真
Ke y wor s Mal b i ln d ta /S mu i k,a y c r n usmoo ,d r c o q o to . s n h o o t r ie tt r ue c n r 1
0 引言
直接转矩控制变频调速技术 , 2 世纪 8 年 是 0 0 代由德国鲁尔大学 的 D pnr k eeb c 教授和 日本学者 o
磁 模 =( 一 ) 链型 J邶 R d - u 邶t
收稿 日期 : 0 - -1 2 6 90 . 0 0
何
萍
女
17 年生 ; 95 在读硕士研究生 , 现从事测试计量技术及仪器专业方面的研究
维普资讯
防 爆 电机
( X L SO P O FE E T I C IE) E P O IN— R O L C R CMA H N
MATLABSimulink异步电机直接转矩控制研究报告方法
基于MATLAB/Simulink的异步电机直接转矩控制研究方法丄I o引言直接转矩控制<DTC )技术是继矢量控制技术之后发展起来的一种新型变频调速技术,于20世纪80年代由德国学者M. Depenbrock和日本学者I. Takahashi首先针对异步电动机提出,90年代由Zhong. L, Rahman M F, Hu Y W 等学者提出永磁同步电动机直接转矩控制理论。
它采用空间矢量分析的方法,直接在定子坐标系下计算并控制交流电动机的转矩和磁链,采用定子磁场定向,借助于离散的两点式控制(Band-Band控制>产生脉宽信号,直接对逆变器的开关状态进行最佳控制,以获得转矩的高动态性能。
DTC具备控制结构简单、转矩动态响应迅速、对电动机参数依赖少、对电动机参数变化鲁棒性好等优点。
目前广泛应用于异步电动机、永磁同步电动机中,在家用电器、汽车工业、电力机车牵引等工业生产中发挥着巨大的作用。
本文分析三相异步电机的数学模型的基础上,介绍了三相异步电动机直接转矩控制系统的控制原理,基于MATLAB/Simuli nk仿真平台建立三相异步电动机直接转矩控制系统的整体仿真模型以及该系统各组成的仿真模型。
仿真结果表明,该控制方法可以有效地实现电机转速的快速跟踪,该系统具有较高的动、静态性能,有效地减小了电动机磁链、转矩的脉动,改善了交流调速系统的稳态性能。
1.异步电动机的数学模型异步电机是一个高阶次、非线性、强耦合的多变量系统,因此对异步电机的数学模型进行分析时,通常作以下假设:<1)忽略空间谐波,假设三相绕组对称,产生的气隙磁场按正弦分布。
<2)忽略磁路饱和现象。
<3 )不计铁心损耗。
<4)不考虑频率和温度变化对绕组的影响。
采用空间矢量分析法,在正交定子坐标系上描述异步电机。
电机在定子坐标系上的数学模型由电压方程、磁链方程、转矩方程以及运动方程组成。
电压方程为:at(1-1>(1-2) 电磁转矩方程为:<1-1)运幼方程为:*式#乓为定子电惑厶为转子电虧匚为互感;R:为定子电阻]&为转子电10;©为转子甬速度;Z为电磁转矩匚兀为负载转無J为转动惯量『与为电机极对埶比船叫刖%,和赳护分别为定子、转子在圧轴和0轴的电压矢量;Q和知'■和L分别为定子、转于在口轴和0轴的电流分量,化口和楚护已加」分别为定子、转子在◎軸和0轴的磁链分量° "2异步电动机直接转矩控制VDTC )原理直接转矩控制(DTC>方法采用空间矢量分析方法直接在定子静止坐标系中分析交流电动机的数学模型,构建转矩和磁链的算法模型,计算和控制交流电机的转矩,借助于滞环控制器<Bang-Bang控制)产生PWM信号,通过开关表直接对逆变器的开关状态进行最佳控制,以获得转矩的高动态性能。
基于SimuLink的直接转矩控制研究
摘要电机调速一直是电机控制领域一个重要的研究课题,优异的调速方法可以保证电机组成的系统的稳定性和快速性,数年来经过人们的不断研究和探索,提出来许多的调速方法,比如传统的调节电枢电压,励磁电流,电压频率等调速方法,还有近些年来发展起来的矢量控制和直接转矩控制,直接转矩控制和矢量控制相比省掉了矢量旋转变换复杂的变化和计算,因此它所需要的信号处理工作特别简单,本文对永磁同步电动机的直接转矩控制进行了详细的分析研究。
直接转矩控制是在维持定子磁链恒定的前提下,通过空间电压矢量来调节定子磁链的旋转速度,从而控制转矩和转速。
本文回顾了直接转矩控制技术和永磁同步电动机的发展历史,详细的阐述了直接转矩控制的基本原理,系统的建立了永磁同步电动机在各个坐标系下的数学模型。
最后用Simulink仿真软件对理想的永磁同步电动机直接转矩控制系统进行了建模和仿真,仿真结果表明直接转矩控制应用于永磁同步电动机的可行性和这种方法控制结构简单,动态响应好的特点。
关键字:直接转矩控制,永磁同步电动机,电机调速,空间电压矢量,仿真AbstractMotor speed motor control has been an important research topic in the field , excellent way to ensure that the motor speed control system consisting of stability and fast , people over the years through continuous research and exploration, the governor proposed many methods for example, the traditional method of adjusting the speed of the armature voltage , excitation current , voltage, frequency, etc. , as well as in recent years developed vector control and direct torque control , direct torque control and vector control compared to dispense with the vector rotation transform complex changes and calculations , so it needs the signal processing is particularly simple , direct torque control of permanent magnet synchronous motor in this article for a detailed analysis. Direct torque control is maintained at a constant stator flux premise through space voltage vector to adjust the rotation speed of the stator flux , thereby controlling the torque and speed. This paper reviews the development history of direct torque control technology and permanent magnet synchronous motor , a detailed exposition of the basic principles of direct torque control system, the establishment of a permanent magnet synchronous motor mathematical model in various coordinate systems . Finally Simulink simulation software ideal for permanent magnet synchronous motor direct torque control system modeling and simulation results show that the direct torque control of permanent magnet synchronous motor used in this method is feasible and simple control structures , dynamic response good features.Keywords: direct torque control of permanent magnet synchronous motor , motor speed , space voltage vector , simulation目录1 绪论 (1)1.1直接转矩控制技术简介及其发展历史和现状 (1)1.1.1直接转矩控制技术简介 (1)1.1.2 直接转矩控制技术的发展历史和现状 (1)1.2永磁同步电动机简介及其应用领域和发展现状 (4)1.2.1引言 (4)1.2.2 永磁同步电动机简介 (4)1.2.3 永磁同步电动机的应用领域和发展现状 (5)1.3直接转矩控制在永磁同步电机控制中的应用 (6)2 永磁同步电动机基于定子x-y坐标系数学模型 (9)2.1 空间坐标系简介 (9)2.2 永磁同步电机在各个坐标系中的数学模型 (10)2.2.1永磁同步电机在三相定子坐标系(a−b−c)中模型 (10)2.2.2永磁同步电机在二相定子坐标系(α−β)中模型 (11)2.2.3 永磁同步电机在与转子同步旋转的正交参照系(d−q)中模型 (13)2.2.4 永磁同步电机在与定子磁链同步旋转的正交参照系(x−y)中模型 (14)3基于直接转矩控制的永磁同步电动机控制系统 (17)3.1直接转矩控制的工作原理 (17)3.2 永磁同步电动机直接转矩控制系统的设计 (18)3.2.1 空间电压矢量的选择 (18)3.2.2空间电压矢量对定子磁链的控制 (20)3.2.3空间电压矢量对转矩的控制 (22)3.3直接转矩控制系统的组成 (23)3.3.1两相定子坐标系下定子电流的获得 (23)3.3.2 两相定子坐标系下电压的获得 (24)3.3.3 磁链计算单元 (25)3.3.4 转矩计算单元 (25)3.3.5 磁链和转矩滞环比较单元 (25)3.3.6 开关电压矢量选择单元 (26)4 永磁同步电动机直接电动机直接转矩控制系统的仿真 (30)4.1仿真软件简介 (30)4.2 系统仿真模型的建立 (30)4.2.1 永磁同步电动机模型的建立 (30)4.2.2 逆变器模型的建立 (36)4.2.3 电压矢量开关表模型的建立 (37)4.2.4转矩比较与磁链比较环节 (39)4.2.5 整体仿真系统 (40)4.3 仿真结果 (40)4.3.1 未加负载不同给定转速下的系统响应 (40)4.3.2 负载为阶跃信号时的系统响应 (45)5 结论和展望 (47)致谢 (48)参考文献 (49)1 绪论1.1直接转矩控制技术简介及其发展历史和现状1.1.1直接转矩控制技术简介直接转矩控制(Direct Torque Control——DTC)[1],国外的原文有的也称为Direct self-control——DSC,直译为直接自控制,这种“直接自控制”的思想以转矩为中心来进行综合控制,不仅控制转矩,也用于磁链量的控制和磁链自控制[3,4]。
基于Matlab_Simulink的异步电机直接转矩控制系统仿真_何萍
, 2# ! . ) ! # !’ 2 , ’ . ) # ! . " & , )’$ 2 # ! ! . "
[ ]
( ) !
" $ " 2 $ , ’$ ! " ! 式中,- 5 ( 。 ./ ’ ’ 6’$) * ) 磁链方程为
电气应用 ! " " #年第! $卷第%期
基于 8 5 ’ # 5 6/ . / 0 $ # / 1 2的异步电机直接转矩控制系统仿真
$* ’ 2 ’$ 2# * ! / * ! ! # ! ! # $* 2 ’ 2 ’$ * * * " " $ $* ’$ 2 ’ 2 * ! ) ) !
" $ "2 $* " 转矩方程为
( ) -
’$
2
$ " $ ’ * ) ) " ( ) 7
( ! 0( $ " * * * * !) 4 $* " ) $* " 运动方程为
, 引言
直接转矩控制变频调速技术,是% "世纪2 "年 代由德国鲁尔大学的 3 4 4 , 1 6 7 8 - 教授和日本学者 5 9 / / : / ; : (提出的。它用空间矢量分析方法,在二 相静止坐标系下计算、控制异步电动机的磁链和转 矩,采用两点式调节产生 < =. 信号,直接对逆变 器的开关状态进行最佳控制,以获得转矩的高动态 性能。直接转矩控制技术自诞生起就以其新颖的控 制思想,简洁明了的系统结构,优良的静、动态性
" " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " " ! " ! 直接转矩控制系统仿真模型 直接转矩控制系统的仿真模型如图!所示,磁 链模型 ( )的实现如图 & 所示,先将测得的三 " # $ % 相定子电压和定子电流经过三相 / 二相变换,然后 用积分模块建立起磁链模型。转矩模型 ( ) ’ ( ) $ + * 的实现比较简单,在此省略。
基于Simulink_S函数的直接转矩控制系统仿真研究
关键词 :直接转矩控制 ; 感应电机 ; 仿真 ; S 函数 中图分类号 : TH921151 文献标识码 : B 文章编号 : 100327241 (2006) 0420052206
Si m ulati o n of a Direct Tor q u e Co ntr ol S ys t e m
收稿日期 :2005 - 09 - 21 52 | Technique s of Automation &Applications
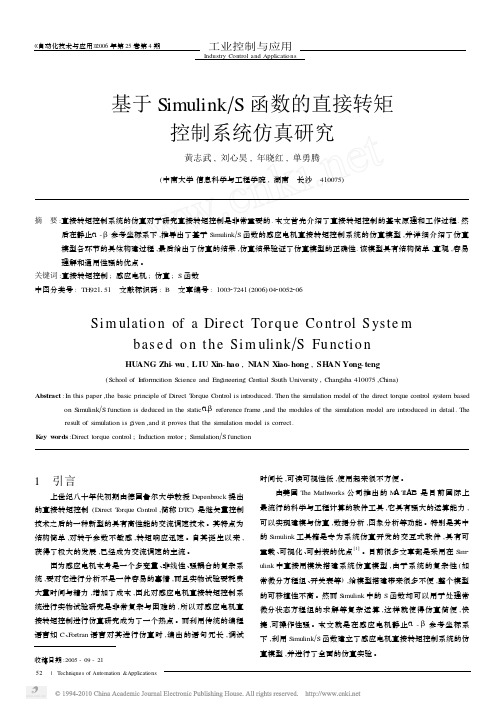
时间长 ,可读可视性低 ,使用起来很不方便 。 由美国 The Mathworks 公司推出的 MΑTLΑΒ 是目前国际上
最流行的科学与工程计算的软件工具 ,它具有强大的运算能力 , 可以实现建模与仿真 ,数据分析 ,图象分析等功能 。特别是其中 的 Simulink 工具箱是专为系统仿真开发的交互式软件 ,具有可 重载 、可视化 、可封装的优点[1] 。目前很多文章都是采用在 Sim2 ulink 中直接用模块搭建系统仿真模型 ,由于系统的复杂性 (如 常微分方程组 、开关表等) ,给模型搭建带来很多不便 ,整个模型 的可移植性不高 。然而 Simulink 中的 S 函数却可以用于处理常 微分状态方程组的求解等复杂运算 ,这样就使得仿真简便 ,快 捷 ,可操作性强 。本文就是在感应电机静止α- β参考坐标系 下 ,利用 SimulinkΠS 函数建立了感应电机直接转矩控制系统的仿 真模型 ,并进行了全面的仿真实验 。
基于Matlab/Simulink的直接转矩控制系统仿真研究
本 文 根 据 异 步 电机 在 定 子 坐 标 系 下 的数 学 模
型 ,得 出直接 转矩 控制 系统 的原 理 和基 本框 图 。采 用 Mal /i l k t bSmui 软件 对该 系统进 行仿 真研 究 , a n 得 出 了转 速 、转矩 波形 。
流 和磁链 值 ;L… L 分 别为 定 子 、转子 自感 和 定 sL m 转 子 间互 感 ; R 分 别为 定 、转子 电 阻 ; R、 , P为 微分 算 子 ;∞为 电机 转 子 角速 度 ;n为 电机 极对 数 。
M ・ e eb ok教 授和 日本 的 I・ a a ah 教授 分 D p n rc T k h si
别于 18 9 5年及 1 8 年 提 出来 的n】 96 -。 2 直接 转矩 控制 与矢 量控 制 的区 别是 ,它 不是 通 过控制 电流 、磁 链等变 量 间接 控制 转矩 ,而 是用 空 间矢 量 的分析 方法 ,以定 子磁 场定 向方式 ,对定 子
l
从 上式 可 看出 ,电机 电磁 转矩 与定 子 、转 子磁 链 幅值及磁 通 角有关 。因此 ,通 过 改变磁 通 角的大 小就 可 以改变 电磁转 矩 的大小 。在动 态过程 中 ,由 于 交流 电机 的转 子 电气时 间常数 一般 较 大 ,相 对于 定 子磁链 而言变 化较 缓慢 ,所 以可忽 略转 子磁 链 的
0 引言
直 接 转矩 控 制 ,英 语称 之 为 DS ( rc ef C Di t l e S . C nr1 DT Di c T ru o t 1, 近二 十年 ot ) o或 C( r t oq e nr ) 是 e C o
U
R+ 0 p
o c L
Ur a
基于MATLAB的直接转矩控制系统的仿真研究
本科毕业设计论文题目基于MATLAB的异步电机直接转矩系统的仿真研究专业名称学生姓名指导教师毕业时间毕业 任务书一、题目 基于MATLAB 的异步电机直接转矩控制系统的仿真研究二、指导思想和目的要求通过毕业设计,加深对所学自动控制原理,电力电子,电机学等的基本原理的掌握及应用,了解异步电机直接转矩控制系统的仿真研究以及MATLAB 相关工具箱进行建模仿真等方面知识,掌握异步电机直接转矩控制系统的仿真研究的工作原理及构成,为今后的学习工作打下一定的基础。
三、主要技术指标重点分析掌握异步电机直接转矩控制系统,然后对其进行MATLAB 的仿真,通过修改系统各部分的参数,可以输出稳定的波形。
根据示波器输出结果,对系统的性能进行分析。
四、进度和要求1.. 准备阶段;完成开题报告与外文翻译 第1周 ~ 第2周2. 完成总体设计方案的论证并撰写开题报告 第3周 ~ 第4周3. 分析异步电机直接转矩控制系统 第5周 ~ 第7周4. 提出异步电机直接转矩控制系统的性能指标、控制原则和控制要求,制定控制系统的控制策略和方法 第8周 ~ 第9周5. 建立系统的数学模型及仿真模型,系统运行性能仿真分析 第10周~第12周6. 完成论文撰写 第13周~第15周7. 准备答辩 第16周五、主要参考书及参考资料[1]卢京潮.自动控制原理.西安:西北工业大学出版社,2010[2]谢鸿鸣,陈伯时.异步电机定子磁链的间接观测方法[J].电气传动,1999[3]刘贤兴等.电力拖动与控制.北京:机械工业出版社,2004[4]程宪平.机电传动与控制.武汉:华中科技大学出版社,2003[5]罗飞等.电力拖动与运动控制系统.北京:化工工业出版社,2007[6]洪乃刚.电力电子和电力拖动系统的MATLAB 仿真.北京:化工工业出版社,2007设计 论文[7]李夙.异步电动机直接转矩控制.北京:机械工业出版社,1994[8]别红波,徐中.基于MATLAB的异步电机无速度传感器直接转矩控制的仿真研究.[9]李永东.交流电机数字控制系统.[M]北京:机械工业出版社,2002[10]薛定宇,陈阳泉.基于MATLAB/Simulink的系统仿真技术与应用. 北京:清华大学出版社,2002[11]孟庆春,叶锦娇,郭凤仪.异步电动机直接转矩控制系统的改进方案. [J].中国电机工程学报,2005,25(13):118–122[12]陈伯时.交流调速系统.[M].电气自动化新技术丛书.北京:机械工业出版社2005[13]尔桂花,窦曰轩编著.运动控制系统.[M].北京:清华大学出版社,2002[14]王君艳.交流调速.[M].北京:高等教育出版社,2003[15]王康.异步电动机直接转矩控制系统的研究与实现.沈阳:东北大学,2004[16]甄鹏.异步电机直接转矩控制系统改善低速性能的研究.湖南:中南大学,2005[17]李武君,阮毅.异步电机直接转矩控制系统中的定子磁链观测模型.[J].上海市电机工程学会,2006学生指导教师系主任摘要在交流调速中,直接转矩控制以思想新颖、结构简单、控制手段直接和动态特性优良的特点成为了该领域的研究热点。
基于matlab simulink的控制系统仿真及应用

基于matlab simulink的控制系统仿真及应用Simulink是MATLAB的一个附加组件,它提供了一种可视化建模和仿真环境,主要用于控制系统、信号处理、通信系统等领域的建模和仿真。
以下是一个简单的基于Simulink的控制系统仿真的步骤:
1. 模型建立:首先,你需要使用Simulink库中的模块来构建你的控制系统模型。
这些模块包括输入、输出、控制算法等。
你可以直接从库中拖放模块到你的模型中,然后通过连接线将它们连接起来。
2. 参数设置:在连接模块后,你需要为每个模块设置适当的参数。
例如,对于传递函数模块,你需要输入分子和分母的系数。
3. 仿真设置:在完成模型和参数设置后,你需要设置仿真参数,例如仿真时间、步长等。
4. 运行仿真:最后,你可以运行仿真并查看结果。
Simulink提供了多种方式来查看结果,包括图形和表格。
在Simulink中,你可以使用许多内建的工具和函数来分析和优化你的控制系统。
例如,你可以使用MATLAB的控制系统工具箱中的函数来分析系统的稳定性、频率响应等。
总的来说,Simulink是一个强大的工具,可以用于设计和分析各种控制系统。
通过学习和掌握这个工具,你可以更有效地进行控制系统设计和仿真。
直接转矩控制系统仿真实验
直接转矩控制系统仿真实验田望同(江南大学物联网工程学院,江苏省无锡市)摘要:随着电力电子及数字信号处理技术的进步,变频调速技术得到了飞速的发展。
直接转矩控制技术是继矢量控制技术之后发展起来的一种新型、高性能技术。
与矢量控制相比较,省去了复杂的矢量变化、克服了矢量控制系统对电机转子参数的依赖性等缺点,具有转矩响应快、控制结构简单、易于实现全数字化的特点。
本文介绍了异步电机直接转矩控制的基本原理和系统的基本构成,在此基础上,通过Matlab/Simulink建立了各个模块的仿真模型,构建了直接转矩控制仿真系统,对直接转矩控制方法的特点及其存在的问题进行了仿真分析研究,验证了直接转矩控制系统的可行性.关键词:直接转矩控制;异步电机;Matlab/Simulink仿真Simulationexperiment ofdirect torque controlsystemTianwangtong(Jiangnan University,School of Internet of Things Engineering)As the electric electronic and digital signal processor technologyprogresses,the adjustable—speed technology with variable frequency has a rapidlydevelopment.The Direct Torque (DTC)followingV ector Control is a new typeand high performance technology.Compare with V ector Control Which has complicatedcoordinate transformation and strong dependency of rotor parameters,the DTCtechnique of induction motors is known to have a simple control structure、fast torqueresponses and easy to implement.The basic principle and structure of DTC have been introduced,on this ground,UsingMatlab/Simulink build the simulation models which form the whole DTC simulationsystem.Then,DTC method prove to be of feasibility according to study and analyze thecharacteristic of the simulation system..Keywords:Direct torque control; Induction motor ;Matlab/Simulink1引言(Introduction)直接转矩控制变频调速技术是用空间矢量分析方法,在二相静止坐标系下计算、控制异步电动机的磁链和转矩,采用两点式调节产生<=.信号,直接对逆变器的开关状态进行最佳控制,以获得转矩的高动态性能。
直接转矩控制基本原理和仿真研究报告
直接转矩控制的基本原理和仿真研究摘要:直接转矩控制技术是继矢量控制技术之后,在交流传动领域内发展迅速的一种高性能调速技术,该控制方法以其思路新颖、结构简单及性能良好等优点引起了广泛关注和研究。
与矢量控制技术不同,直接转矩控制技术采用定子磁场定向,直接将磁通和电磁转矩作为控制量,对电磁转矩的控制更加简捷快速,提高了系统的动态响应能力。
由于直接转矩控制技术本身的固有优势,使直接转矩控制的理论研究和技术开发越来越受到重视,进展的步伐也越来越快。
本文将直接转矩控制技术应用于异步电机中,从异步电机的数学模型岀发,介绍了直接转矩控制技术的基本理论。
在深入剖析原理的基础上将直接转矩算法模块化,在Simulink环境下建立了异步电机直接转矩近似圆形磁链控制系统仿真模型。
仿真结果表明,直接转矩控制技术动态响应能力快,控制方法直接,但是低速性能较差,低速状态下存在转矩脉动过大,定子电流畸变严重等缺点。
关键字:直接转矩控制,异步电机,simulinkThe Basic Principle and Simulation Study of DirectTorque ControlKong Fei,Ye Zhe n, Shao Zhuyu<Jiangnan University, Wuxi, Jiangsu, 214000, P. R. China )Abstract: Direct Torque Control (DTC> technology is a high-speed technology in the field of AC drive following the technique ofvector control and it has rapid development in recent years.This control strategy attracts wide attention and research for its novel idea, simple structure and good performance. Differ from the vector control technologies, DTC technology uses the stator flux orientation and directly makes the flux and electromagnetic torque as the control volume, therefore the control of the electromagnetic torque is simple and fast, the system dynamic response capability is improved. Due to the inherent advantages of DTC technology, its theoretical research and technological development is receiving increasing attention, also the pace of progress faster and faster.In this article, we make direct torque control techniques applied to asynchronous motors. From a mathematical model of induction motor starting, introduced the basic theory of DTC technology. Based on depth analysis of the basis and principles, we module the DTC algorithm. In the Simulink environment, the asynchronous motor direct torque control system of quasi-circular flux simulation model is established. Simulation results show that the DTC technologies has fast dynamic response capability and directly control method, but the low-speed performance is poor, such as torque ripple is too large in low speed state and the stator current distortion is serious. Key words:direct torque control (DTC>,asynchronous motor,simulink1前言直接转矩控制技术作为一种新颖的电机控制策略,基本思想就是直接将电磁转矩作为被控制量,与矢量控制相比,无需进行复杂的坐标变换,对电机的控制更加快捷迅速,控制系统的动态响应能力得到进一步提高。
基于Matlab_Simulink的直接转矩控制仿真系统_唐湘越
摘 要:直接转矩控制技术是一种具有优良静、动态性能的交流电机控制技术。
文章介绍了直接转矩控制技术的基本原理,并采用Matlab/Simulink 软件对直接转矩控制仿真系统进行了建立,通过对仿真系统的建立和仿真结果的分析,能为后续工作中正确建立硬件系统和编写软件应用程序具有指导意义,从而大大缩短了系统开发的时间,为下一步直接转矩控制的成功实现提供了基础。
关键词:直接转矩控制;异步电机;模型参考自适应;仿真系统中图分类号: TP391.9 文献标识码: A 文章编号:1673-1131(2010)01-043-04 一、直接转矩控制系统的基本原理直接转矩控制方法是1985年由德国鲁尔大学的Depen-brock 教授首次提出的,它是继矢量控制技术之后发展起来的一种新型交流变频调速技术。
直接转矩控制是根据给定的电磁转矩指令与交流电机的实际电磁转矩观测值相比较得到转矩误差,确定转矩的调节方向,然后根据定子磁链的大小与相位角确定选择合适的定子电压空间矢量,从而确基于Matlab/S imulink的直接转矩控制仿真系统唐湘越/大连交通大学(大连·116028)The direct torque control simulation system Based on Matlab/SimulinkAbstract: The Direct Torque Control technology is a kind of AC motor control technology which has excellent static and dynamic performance.The article introduces the basic principles of Direct Torque Control technology and set up simulation system of direct torque control using Matlab / Simulink software , through setting up the simulation system and analysising simulation results, it can set up the hardware system correctly and software applications giving the preparation of guidance, thus it reduces system development time greatly and provides the basis for implementation about direct torque control for the next step of success.Key words: Direct Torque Control; Asynchronous motor; model reference adaptive; Simulation System定三相电压源逆变器的开关状态,使交流电机的电磁转矩快速跟踪外部给定的电磁转矩指令值。
基于MatlabSimulink设计的直接转矩控制系统仿真
摘 要:本文设计了一种基于 MatlabSimulink 软件仿真的直接转矩控制系统,通过其数学仿真功能设计出直接
转矩控制系统的转矩调节、转速调节等模块,组成三相异步电动机的直接转矩控制系统。仿真结果证明了该
方法能够准确的控制三相异步电动机的速度和转矩稳定输出。
关键词:异步电动机;数学仿真;直接转矩
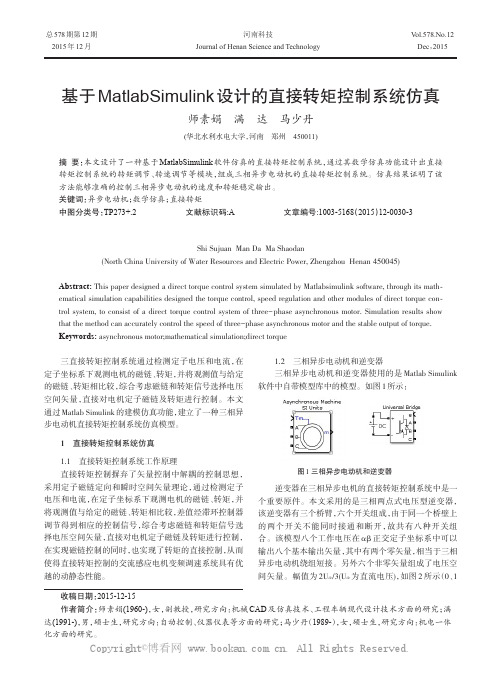
三直接转矩控制系统通过检测定子电压和电流,在 定子坐标系下观测电机的磁链、转矩,并将观测值与给定 的磁链、转矩相比较,综合考虑磁链和转矩信号选择电压 空间矢量,直接对电机定子磁链及转矩进行控制。本文 通过 Matlab Simulink 的建模仿真功能,建立了一种三相异 步电动机直接转矩控制系统仿真模型。
动方向是沿着定子电压的方向运MatlabSimulink 设计的直接转矩控制系统仿真
·31·
代表逆变器 A、B、C 的开关状态)。
电压空间矢量开关信号选择是直接转矩控制系统的 精髓。为了实现对定子磁链的闭环控制,需要判断定子 磁链的空间位置,根据定子磁链在静止两相 α-β 坐标系 下的空间角度 θ 得出定子磁链所在扇区(如图 2 所示)以 及电压矢量空间开关表最终得到电压空间矢量开关信 号。仿真模型如图 3 所示。
图 2 三相电压型逆变器的电压空间矢量
1.3 磁链滞环调节和转矩滞环调节
磁链滞环调节的目的就是根据估算出的磁链判断磁
链的运动轨迹位置,并且能够正确的反映变化的磁链开
关信号来选择相应的电压空间矢量。根据定子电压和定
子磁链之间的关系可以用公式(1)来表示:
∫ ψs(t)= (u(s t) - i(S t)Rs)dt )
也可以写成微分形式:
(1)
图 3 电压矢量开关信号选择仿真模型
1.5 定子磁链 u-i 模型观测器
基于MatlabSimulink设计的直接转矩控制系统仿真

基于MatlabSimulink设计的直接转矩控制系统仿真
师素娟;满达;马少丹
【期刊名称】《河南科技》
【年(卷),期】2015(000)024
【摘要】本文设计了一种基于MatlabSimulink软件仿真的直接转矩控制系统,通过其数学仿真功能设计出直接转矩控制系统的转矩调节、转速调节等模块,组成三相异步电动机的直接转矩控制系统.仿真结果证明了该方法能够准确的控制三相异步电动机的速度和转矩稳定输出.
【总页数】3页(P30-32)
【作者】师素娟;满达;马少丹
【作者单位】华北水利水电大学,河南郑州450011;华北水利水电大学,河南郑州450011;华北水利水电大学,河南郑州450011
【正文语种】中文
【中图分类】TP273+.2
【相关文献】
1.基于智能算法的直接转矩控制系统仿真研究 [J], 辛丽;佘双翔;许志伟
2.基于圆形磁链的异步电动机直接转矩控制系统仿真 [J], 罗毅
3.基于神经网络的SRM直接转矩控制系统仿真研究 [J], 王勉华;王瑞;刘春元
4.基于SVPWM的异步发电机模糊直接转矩控制系统仿真 [J], 李岩
5.基于Saber的异步电动机直接转矩控制系统仿真 [J], 王刚
因版权原因,仅展示原文概要,查看原文内容请购买。
基于Matlab_Simulink的异步电动机直接转矩控制系统仿真
基于Matlab_Simulink的异步电动机直接转矩控制系统仿真基于Matlab_Simulink的异步电动机直接转矩控制系统仿真第卷年第期月哈尔滨理工大学学报,《基于的异步电动机直接转矩控制系统仿真张春喜,张俊喜,哈尔滨理工大学电气与电子工程学院黑龙江哈尔滨巧以科摘要根据直接转矩控制原理使用,,建立,异步电动机直接转矩控制系统,的仿真模型基于国形磁链轨迹控制方案对控制系统进行了仿真验证了控制方案的有效性仿真结果体现出了阅形磁链轨迹控制方案的优点关键词异步电动机直接转矩控制文献标识码仿真模型文章编号一一一中图分类号月刀‘摊罗示,一,别扒刃‘了朋的,,的《阵,加如现如。
闰’年德国鲁尔大学的’提出了直接转矩控制理论〔】并于,,教授首先将它应用到,肠等模型费时费力本文利用。
中库提供的模块组建仿真平台对,,异步电动机的直接转矩控制进行了仿真研究弱磁调速领域该理论直接对转矩进行控制解决了矢量控制中计算量大效果易受电动机参数变化影响的问题使异步电动机的瞬态性能得到了显著改,、直接转矩控制的基本原理图善但此种方法是使定子磁链轨迹趋于六边形转矩,所示为直接转矩控制系统框图该系统采,,脉动大调速性能受到影响理想情况下定子磁链轨迹应是圆形本文采用的控制方法是使定子磁链轨迹近似圆形,,,用定子磁场定向直接在定子坐标系下计算和控制异步电动机的转矩将实际转矩磁链分别与给定值比较形成转矩磁链的闭环控制,、、是国际控制界应用最广泛的计算机软定转子磁链与电动机转矩之间的关系可用式表示、件以往的系统仿真多是作者自己搭建电机逆变器收稿日期《场洲一、以一一,作者简介张春喜男哈尔滨理工大学教授,© 1994-2021 China Academic Journal Electronic Publishing House. All rights reserved.感谢您的阅读,祝您生活愉快。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
11 月 5 日,SIAF GUANGZHOU 的主承办单位 ——中国对外贸易广州展览公司、广州富洋展览有 限公司、广州光亚法兰克福展览有限公司以及德国 美赛高法兰克福展览有限公司在上海召开了媒体见 面会,邀请了国内外的自动化行业媒体出席。美赛 高法兰克福展览公司副总裁Petra Haarburger女士在 会上做了发言,SIAF GUANGZHOU在自动 化领域内引起了巨大反响,众多国际知名品牌纷纷 积极报名参与此次盛会,主办各方都对SIAF2010的 前景充满了信心和期待。
• 聚焦“工业机器人”,政府高峰论坛将引领工 业技术潮流,为广东电子信息、电气机械及专用设 备、汽车等支柱产业提供国际商贸平台;
• 大型工业机器人展示区——展示“永不谢幕” 的现代工厂;
• 覆盖广东、广西、湖南、湖北、河南和海南的 中南六省(区)自动化学会组织大型专业买家团进 军 SIAF,与展商共谋合作;
参考文献:
[1] M.Denpenbrock. Direct Self Control(DSC)of Invertor-fed Induction Machine[J].IEEE Transaction on Power Electronics,
1998,3(4). [2] I.Takahashi and T.Noguchi.A New Quick Response and High
0 引言
直接转矩控制,英语称之为 DSC(Direct Self- Control)或 DTC(Direct Torque Control),是近二十年 继矢量控制技术之后发展起来的一种新型的具有高 性能的交流电机调速技术。该技术的原理是德国的 M·Depenbrock 教授和日本的 I·Takahashi 教授分 别于 1985 年及 1986 年提出来的[1,2]。
• 联合行业专业媒体进行全国联网式报道,全 面提升展会的行业知名度;
• 奔赴德国、日本等全球知名工业自动化展会 招揽买家,实现国内 / 国外市场“两手抓”。
【上接第 109 页】
5 结束语
本文利用 MATLAB 6.5 构造了一个直接转矩控 制系统,并进行仿真研究,从建立系统过程和仿真 运行过程来看,用MATLAB仿真软件建模大大缩减 了工作量,且形象直观,参数修改也很方便。另外, 从仿真结果来看,利用MATLAB软件辅助对直接转 矩控制系统进行研究,不仅理论上合理,技术上也 是可行的。
【108】 第 32 卷 第 1 期 2010-1
(7)
3.2.2 磁链与转矩滞环调节模块
磁链允许容差通过定义施密特触发器的上下触 发点来设置,输出 sf (0 或 1)即磁链滞环调节器的输 出状态量。图 4 所示为定子磁链滞环调节模块。
如图5所示为转矩滞环调节子系统,其中ωr、ωr* 分别为观测所得转速和给定转速参考值,将其 PI 调 节后得到给定转矩和实际转矩。转矩滞环调节的输 出状态量 ST 有两种状态值,分别为 1 和 0,将 PI 调 节得到的给定转矩和实际转矩的差值与容差逻辑比 较,即可得到 ST 的值,在查电压矢量最优开关表时
• 德国传感器技术协会 AMA、美国运动控制协 会 MCA、台湾电机电子工业同业公会 TEEMA、广 东省自动化学会、广东英国商会、德国商会等知名 商协会组团参加 SIAF GUANGZHOU,全景展示全 球先进的工业技术及方案;
• 西门子、劳易测、施克、安川、菲尼克斯、图 尔克等旗舰企业角逐 SIAF GUANGZHOU;
2010SIAF 10 大参与理由,不容错过! •“十二五”计划向高新技术产业倾斜,广东省 将重点加强产业升级和转型;
• 共享 SPS/IPC/DRIVES 逾 48,000 高质量买家 及专业观众资源、成功的办展经验和展会营销模 式;
• SIAF 展商委员会——让展商做展会的主人, 共商行业趋势及展会营销策略;
Efficiency Control Strategy of an Induction Motor.IEEE Transaction on Industry Application[J],VOL.IA-22,No.5 September/October 1986. [3] 李夙.异步电动机直接转矩控制[M].北京:机械工业出版社, 1999. [4] 陈伯时.电力拖动自动控制系统[M].北京:机械工业出版社, 2005. [5] 薛定宇,陈阳泉.基于 MATLAB/SIMULINK 的系统仿真技 术与应用[M].北京:清华大学出版社,2002. [6] 陈特放,刘子建.基于 MATLAB/SIMULINK 的异步电动机 直接转矩控制系统的仿真和建模[J].机车电传动,1998,2.
本文根据异步电机在定子坐标系下的数学模 型,得出直接转矩控制系统的原理和基本框图。采 用 Matlab/Simulink 软件对该系统进行仿真研究,得 出了转速、转矩波形。
1 α-β坐标下异步电机数学模型
由于直接转矩控制是基于静止坐标系的,因此 采用 α-β 坐标系上的数学模型。异步电机数学模型 如下[4]。
将用到这一变量。它主要用来决定在表中选取有效 空间电压矢量还是零矢量。
滞环控制中的选择与作用过程,低速域磁链畸变 小;相电流波形见图 7,基本为正弦波形,这正是 走圆形磁链的优点,电流谐波分量减小,控制更为 平滑;图 8 的转矩可看出,当系统趋于稳定后,转 矩近似为给定的负载转矩。从实验结果可知,本实 验系统采用的直接转矩控制系统具有较好的稳态 性能。
图 1 近似圆形磁链控制 DTC 系统框图
3.2 系统仿真实现
仿真时直接选用 Simulink 电气模型库中的绕线 式异步电机模型,它的 m_SI 接口通过测量模块 Measurement Demux 可以直接观测到电机定子和转 子侧的电压、电流及转速等变量,Tm接口可接入负 载转矩。
近似圆形磁链控制系统仿真总图如图 2 所示。 图中 cilianhuanjie 为自己定义的子系统(Subsystem), 根据电机定子侧的三相电流和电压经 3/2 变换计算 两相静止坐标系下定子磁链的值 ψsα、ψsβ 以及转矩
3.1 系统基本结构
图1为近似圆形磁链直接转矩控制系统结构图。 如图 1 所示,在直接转矩控制中,通过检测定子两 相电流、直流母线电压和电机转速进行定子磁链观 测计算和转矩计算,使二者分别与给定定子磁链和 给定转矩相减,其差值又分别通过各自的滞环比较 器相比较而输出转矩和磁链的增、减信号,把这两 个信号输入矢量选择单元,即矢量开关表,再加上 定子磁链所在的扇区位置就得到了满足磁链为圆形、 转矩输出跟随转矩给定的电压矢量。磁链和转矩的 滞环可以设置多级,并且其宽度可变,滞环宽度越 小,开关频率越高,控制越精确。
摘 要:根据异步电机直接转矩控制系统的数学模型,采用 Matlab/Simulink 模块完成了直接转矩控
制系统的建模与仿真。仿真结果表明,直接转矩控制系统具有结构简单、转矩响应快、鲁棒性
强等优点。
关键词:直接转矩控制;异步电动机;空间矢量;仿真
中图分类号:TM921.51
文献标识码:B 文章编号:1009-0134(2010)01-0107-04
第 32 卷 第 1 期 2010-1 【107】
从上式可看出,电机电磁转矩与定子、转子磁 链幅值及磁通角有关。因此,通过改变磁通角的大 小就可以改变电磁转矩的大小。在动态过程中,由 于交流电机的转子电气时间常数一般较大,相对于 定子磁链而言变化较缓慢,所以可忽略转子磁链的 动态特性。因此可以通过控制定子磁链的旋转速度 来改变磁通角的大小,进而控制电机的转矩。这就 是直接转矩的基本控制思想。
3 直接转矩控制系统仿真模型
Te。电机的定子三相电流 is_abc 以及转速 ωm 可直接 通过 Measurement Demux 测量模块得到。
近似圆形磁链控制是通过适当的选择开关切换 频率和施加于电机端的输入电压,使定子磁链的运 动轨迹纳入一定的范围内来实现的。在定子磁链旋 转过程中,有效电压矢量的施加由磁链偏差的大小 和磁链的具体方向来确定。整个仿真系统主要由定 子磁链 (cilianhuanjie)模块、转矩滞环调节模块、磁 链滞环调节模块、逆变器等组成。
【172】 第 32 卷 第 1 期 2010-1
2 直接转矩控制的基本原理
由于电磁转矩其实是定子磁链和转子磁链矢量 相互作用的结果,所以电磁转矩可写成如下形式
(4) 式中:θsr 为定子磁链与转子磁链之间的夹角, 即磁通角;δ 为常量。
收稿日期:2009-10-30 作者简介:东方(1975 -),女,辽宁鞍山人,讲师,工程硕士,从事电气自动化专业的教学和研究工作。
从图 6 圆形磁链轨迹可明显看到电压矢量在
图 7 相电流波 图 8 电磁转矩曲线
图 6 圆形磁链轨迹
图 9 电机转速曲线 【下转第 172 页】
第 32 卷 第 1 期 2010-1 【109】
西门子重磅出击亚洲版 SPS —— SIAF GUANGZHOU
SIAF GUANGZHOU 中国广州国际工业自动 化技术及装备展览会,是全球最大自动化展—— “SPS/IPC/DRIVES 电气自动化展”与华南著名工 控展——“CHIFA 中国(广州)国际工业控制自动 化及仪器仪表展”在中国的完美结合,2010 年 3 月 8~11 日在广州琶洲展馆举办。经过资源整合,展会 将借鉴 SPS 成功办展经验和营销模式投入运行。
基于Matlab/Simulink的直接转矩控制系统仿真研究
Simulation research of direct torque control system based on Matlab/Simulink
东 方,张俊勇