可编程控制器4-步进和功能指令
4、步进顺控指令
并行分支是指同时处理的程 序流程。 图4-7所示例中在S20动作时, X0一接通,S21、S24、S27就同 时动作,各分支流程开始动作。 待各流程的动作全部结束时,X7 接通,然后汇合状态S30动作, S23、S26、S29全部复为“0”状 态。 这种汇合有时被称为排队汇 合。
4.2 编程方法
• 下图所示为一个凸轮转盘,其动作顺序为
• • • • • • • •
首先设计输入/输出点 X0:光遮断器 Y0:原点指示灯 X1:LS1极限开关 Y1:圆盘正转 X2:LS2极限开关 Y2:圆盘逆转 X3:LS3极限开关 X4:LS4极限开关 X5:启动开关 设计的输入和输出点及其动作顺序完成:功能顺 序图(SFC)
• 4.2.1 步进顺控的程序例
– 从状态转移图中有代表性地抽出一个状态,如 图4-9a所示,每个状态具有驱动负载、 指定转移条件以及指定转移目标三个功能。
• 4.2.2 初始状态编程 初始状 选择性分支、汇合的编程
• 1.选择性分支举例(见图4-11)
– 与对一般状态的编程一样,先进行驱动处理, 然后设置转移条件,编程时要由左至右逐个编 程。
图4-11 选择性分支例
• 2.选择汇合举例(见图4-12)
– 先进行汇合前状态的输出处理,然后朝汇合状态转移, 此后由左至右进行汇合转移。这是为了自动生成SFC 画面而追加的规则。
4.2.4 并行分支汇合的编程
• 重新安排输入编号例(见图4-28):
图4-28 重新安排输入编号例
如图4-29所示,驱动功能指令FNC60 (IST),下面的初始状态及相应特殊辅 助继电器就自动被指 定为如下功能: LD M8000 S0:手动初始状态 FNC 60 1步 S1:回原点初始状态 X20 S2:自动运行初始状态 S20 各2步 M8040:禁止转移 S29 M8041:开始转移 M8042:启动脉冲 M8047:STL监控有效
1、cnc可编程步进电机控制器(说明书)
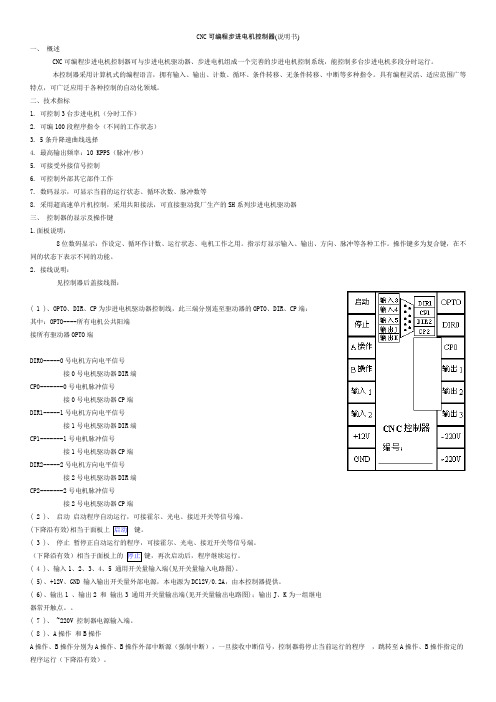
CNC可编程步进电机控制器(说明书)一、概述CNC可编程步进电机控制器可与步进电机驱动器、步进电机组成一个完善的步进电机控制系统,能控制多台步进电机多段分时运行。
本控制器采用计算机式的编程语言,拥有输入、输出、计数、循环、条件转移、无条件转移、中断等多种指令。
具有编程灵活、适应范围广等特点,可广泛应用于各种控制的自动化领域。
二、技术指标1. 可控制3台步进电机(分时工作)2. 可编100段程序指令(不同的工作状态)3. 5条升降速曲线选择4. 最高输出频率:10 KPPS(脉冲/秒)5. 可接受外接信号控制6. 可控制外部其它部件工作7. 数码显示,可显示当前的运行状态、循环次数、脉冲数等8. 采用超高速单片机控制,采用共阳接法,可直接驱动我厂生产的SH系列步进电机驱动器三、控制器的显示及操作键1.面板说明:8位数码显示:作设定、循环作计数、运行状态、电机工作之用。
指示灯显示输入、输出、方向、脉冲等各种工作。
操作键多为复合键,在不同的状态下表示不同的功能。
2.接线说明:见控制器后盖接线图:( 1 )、OPTO、DIR、CP为步进电机驱动器控制线,此三端分别连至驱动器的OPTO、DIR、CP端:其中:OPTO----所有电机公共阳端接所有驱动器OPTO端DIR0-----0号电机方向电平信号接0号电机驱动器DIR端CP0-------0号电机脉冲信号接0号电机驱动器CP端DIR1-----1号电机方向电平信号接1号电机驱动器DIR端CP1-------1号电机脉冲信号接1号电机驱动器CP端DIR2-----2号电机方向电平信号接2号电机驱动器DIR端CP2-------2号电机脉冲信号接2号电机驱动器CP端( 2 )、启动启动程序自动运行,可接霍尔、光电、接近开关等信号端。
(下降沿有效)相当于面板上键。
( 3 )、停止暂停正自动运行的程序,可接霍尔、光电、接近开关等信号端。
(下降沿有效)相当于面板上的键,再次启动后,程序继续运行。
UN UN UN UN 系列运动型可编程控制器应用技术手册-简易说明篇说明书

一,性能规格项目性能运算控制方式 存储程序反复扫描方式,有中断指令输入输出控制方式批处理方式(执行END 指令时),输入输出刷新指令,有脉冲捕捉功能编程语言 继电器符号方式+步进梯形图方式(也可用SFC 表示) 程序 内存 程序容量,形式内置32K 步EEPROM (不需存储器电池支持) ※含文件寄存器,注释最大8K 步顺控指令 顺控指令:27个 步进梯形图指令:2个 指令 种类 步进梯形图指令 FX1N :全部 及大部分2N 指令 型号为FX2N 基本指令 0.55-0.7µs/指令 单步梯形图应用指令 0.55~数10µs/指令 比三菱FX2N 原机快N 倍 运算 处理 速度 CPU 处理能力 0.01us/指令 32位 RISC 100MHZ 输入点数 X000~(8进制编号) 可软件设定滤波时间0-255mS 输入输出点数 输出点数 Y000~(8进制编号) 输入输出合计512点以下一般用 M0~M383 384点 保持用 EEPROM 保持M384~M1535 1152点 辅助继电器特殊用M8000~M8255 256点 初始状态用(EEPROM 保持) S0~S9 10点 状态保持用EEPROM 保持 S10~S999 990点100ms T0~T199 200点(0.1~3,276.7秒) 10ms T200~T245 46点(0.01~327.67秒) 1ms 累计形 T246~T249 4点(0.001~32.767秒) 定时器 (延时置ON ) 100ms 累计形 EEPROM 保持 T250~T255 6点(0.1~3,276.7秒)16位增模式 C0~C15 16点(0~32,767计数器) 16位增模式 EEPROM 保持C16~C199 184点(0~32,767计数器)32位高速双向 C200~C219 20点(-2,147,483,648~+2,147,483,647)计数32位增/减双向 EEPROM C220~C234 15点(-2,147,483,648~+2,147,483,647)计数计数器调整计数器C235~C255 EEPROM 16位通用 D0~D127 128点 EEPROM 保持 D128~D2047最大1920点 16位特殊用 D8000~D8255 256点 数据寄存16位变址V0~V7,Z0~Z7 16点 JAMP 、CALL P0~P127 128点 输入中断 IO □□~I5□□ 6点 指针定时中断I6□□~I8□□ 3点 嵌套 主控用N0~N7 8点常数10进制数(K ) 16位:-32,768~+32,76732位:-2,147,483,648~+2,147,483,64716进制数(H ) 16位:0~FFFF 32位:0~FFFFFFFF二,UN 系列全新运动型可编程控制器[PLC]高速输入输出说明 1,高速输入/硬件计数器输入/外部中断输入说明外部中断号 中断编号 端 口号 高速计数器 上升沿 下降沿 中断控制ON 时禁止备注X0 C235 10K C251-A 10K I001 I000 M8050 X1 C236 10K C251-B 10K I101 I100 M8051 X2 C237 200K I201 I200 M8052 X3 C238 200K I301 I300 M8053 X4 C239 10K I401 I400 M8054 X5 C240 10K I501 I500 M8055 X6 C252-A 10K X7 C252-B 10K 支持SPDHSCS HSCR 指令X10 C253-A 200K X11 C253-B 200K M8198 4倍频 X12 C254-A 200K X13C254-B 200KM8199 4倍频2,高速脉冲输出/肪宽调制输出说明高速脉冲输出端口号 对应 脉冲数 输出中 停止脉宽调制输出备注 Y0 脉冲输出1 D8140 M8147 M8145 PWM1 Y1 脉冲输出2 D8142 M8148 M8146 PWM2 Y2 脉冲输出3 D8150 M8149 M8144 PWM3 Y3脉冲输出4 D8152 M8150M8143 PWM4M8197 ON0.1mS M8197 OFF1mS总频率不超过400K , 单轴最高可200KD8145 :定位指令的基底速度 D8146 :最高速度,默认 100Khz D8148 :加减速时间,默认 100ms全部全部支持支持支持::PLSY ,PLSV ,PLSR ,PWM ,DRVI ,DRV A ,ZRN 指令 注:PLSY 运行中可改变频率注:X0+X1+X2+X3+X4+X5+X6+X7+Y0+Y1+Y2+Y3总频率不应该超过400K3,定时中断说明中断输入编号 中断周期(ms )中断禁止标志位 ON 时禁止 I 6□□ M8056 I7□□ M8057 I8□□在指针名的□□中,输入10-99的整数。
可编程控制器
1:STL (Step Ladder),步进接点指令,用作步进梯形指令中状态器的触点,该指令具有主控功能。
正确错误2:步进接点指令后面可与使CJP/EJP 指令及MC/MCR指令嵌套使用。
正确错误3:PC无论采用何种输出方式,都只起到接通或断开负载回路的作用,而不向负载提供电源。
正确错误4:F1系列可编程控制器,S指令用于对目标元素进行置位,且这种置位具有自保持接通状态的功能。
正确错误5:步进梯形程序中,状态器线圈的驱动,需要用置位指令,才具有步进控制功能。
正确错误6:每个输出继电器有无数对,供编程使用的内部常开、常闭触点。
这些触点对应于元件映象寄存器中该元件的状态。
正确错误7:输出锁存器中的数据,由上一次输出刷新期间输出映象寄存器中数据决定。
正确错误8:PC采用公共输出方式,只能用同一种类型、同一电压等级的电源。
正确错误9:在基本单元处于运行方式时,这时,如果编程器开关由“监视”转向“编程”位置,则编程器立即转入编程操作。
正确错误10:可编程控制器周期扫描的工作方式进一步提高了PC 控制系统的响应速度。
正确错误11:晶闸管输出方式:用于接通或断开开关频率较高的直流负载回路。
正确错误12:功能指令的执行时间是其设定线圈执行时间和执行线圈执行时间之和。
正确错误13:特殊辅助继电器M470,专用以判断六位加减法组合计数器(C660/C661 )计数方式:M470=ON ,则高速计数;M470=OFF ,普通计数方式。
正确错误14:正确错误15:PC 在程序执行阶段及输出刷新阶段,输入映像寄存器均与外界隔离,即:无论输入点的状态怎样变化,输入映象寄存器的内容都保持不变,直至下一个扫描周期的输入刷新阶段。
正确错误16:F1系列可编程控制器功能指令中,设定线圈的设定条件含义是随功能指令的不同而不同的。
正确错误17:M77又称输出禁止,原因在于当M77接通,所有输出继电器、辅助继电器、定时器、计数器都自动断开正确错误18:系统程序存储器:主要存放系统诊断、命令解释、功能子程序调用、管理、逻辑运算、通信及各种参数设定等功能的程序正确错误19:CPU是可编程控制器的核心,主要用来运行用户程序,监控输入/输出接口状态。
电气可编程大题(高级)
1.常用的控制器有KT型凸轮控制器、KG鼓轮控制器、KP型平面控制器。
2.电磁继电器的主要特性是输入-输出特性。
又称为继电特性,串接在电炉中。
3.在继电特性中:X2称为继电器吸合值,X1称为释放值。
K=X1/X2称为继电器的返回系数,K越大灵敏度越高。
4.中间继电器在控制电路中起逻辑关系和状态记忆的功能,以及用于扩展接点的容量和数量。
5.时间继电器按延时方式分为通电延时和断电延时型。
6.热继电器主要用于电气设备的长期过负荷保护,利于电流热效应原理工作的电路。
7.数度继电器由转子、定子、触头,用于三相鼠笼型的异步电动机的反接制动。
8.按钮是一种常用的主令开关。
9.在电气控制线路中,通常采用熔断器和断路器做断路保护。
10.无触点行程开关又称为接近开关,分为有原型和无源型两种,多数为有源型,主要包括检测元件、放大电路、输出驱动三部分。
11.接近开关安检测元件的工作原理可分为高频振荡型、超声波型、电容型、电磁感应型、永磁型、霍尔元件型、磁敏元件型。
12.电阻分为电阻元件和电阻器件。
13.PLC输出接口类型:继电器输出型、晶体管输出型、双向晶闸管输出型。
14.输入元件是电路的输入逻辑变量,可分为主令元件和检测元件。
15.电气控制电路分为输入部分元件、中间逻辑部分、输入执行部分元件。
16.记忆电路有两种基本形式:启动优先和停止优先。
17.控制开关接点和自锁点之间在状态转换时产生的过渡过程时间叫做接点竞争。
18.PLC为串行工作方式,常见的电器为并行工作方式,19.PLC有运行和停止两种工作方式。
20.PLC正常情况下采用串行周期扫描工作方式。
21.PLC采用反复不断读程序并进行逻辑运算的工作方式。
22.单接点指令是用于对梯形图中的一个接点进行编程的指令,它表示一个接点在梯形图中的串接并联和在右母线的初始连接的逻辑关系。
23.可编程序控制器有三种类型的指令:基本逻辑指令、步进顺控指令、功能指令。
24.PLC的工作过程:输入采样阶段、程序处理阶段、输出刷新结果阶段。
电气工程专业《可编程控制技术》教学大纲
电气工程专业《可编程控制技术》教学大纲一、说明1.课程的性质和内容本课程是高等技术院校电气维修专业的一门专业课,本课程的主要内容有:可编程序控制器概论、基本指令及应用、梯形图程序设计、步进顺控指令及其应用、功能指令及其应用和可编程控制器的应用设计等。
2.课程的任务和要求本课程的主要任务是:通过理论学习和上机实验操作,使学生对可编程序控制器系统的组成及运行等有较全面直观的了解,提高实际操作技能和分析问题解决问题的能力,以适应科学技术的发展对技术工人的要求。
本课程的要求是:使学生了解可编程序控制器的基本构成和工作特点,熟悉一种可编程序控制器的基本指令和编程方法,了解以可编程序控制器为核心的控制系统的组成和编程技巧。
3.教学中应注意的问题可编程序控制器及其应用是一门实践性和技术理论性都很强的课程,教学中应根据技工学校主要是培养适应社会发展的需要、掌握现代科学知识、具有较强的操作技能的人才为目标,充分体现技工学校的教学特点,切实贯彻理论练习实际的教学原则,加强上机操作训练,使学生在就业后能够胜任本职业工作。
可编程序控制器的型号有很多种,但其基本指令的功能机编程方法相差无几。
掌握一种型号的可编程序控制器的指令系统和编程方法后,对其他型号的可编程序控制器也触类旁通。
二、学时分配表三、课程内容及要求第一章可编程序控制器概论教学要求:1.了解可编程序控制器的发展概况2.了解可编程控制器的组成及各部分的作用特点。
3.了解可编程控制器的基本工作原理,掌握可编程控制器通用的编程语言。
4.掌握FX系列可编程控制器的应用教学内容:§1-1 绪论§1-2 可编程序控制器的组成和工作原理§1-3 三菱FX可编程序控制器实训一 FX系列PLC硬件认识及应用实训二 FX系列PLC软元件及其研究实训三 FX简易编程器的使用教学建议:1、可编程控制器工作原理主要是了解扫描工作方式和一个扫描周期内各阶段的情况。
2021 年全国职业院校技能机电一体化设备组装与调试
全国职业院校技能大赛赛项规程一、赛项名称赛项编号:ZZ-2021011赛项名称:机电一体化设备组装与调试英文名称:Assembly and Debugging of Mechatronic Equipment 赛项组别:中职组赛项归属产业:加工制造类二、竞赛目的通过工业企业实际的工作任务的实施,检验参赛选手机电一体化设备机械部件的组装、电路安装(含通信网络)、气动部件及系统安装、PLC控制程序编写、工业机械手程序优化及调试、触摸屏使用、电机驱动器设置以及机电设备整体调试等机电一体化技术的核心知识与操作技能;检验参赛选手在工程现场,针对实际问题的分析和处理能力、组织管理与团队协调能力。
竞赛不仅展示职业教育“工作过程导向”的教学改革成果和职业院校师生刻苦学习、热爱岗位良好的精神面貌,同时能引领中职学校“产教融合”的教学改革,促进教学内容与产业技术技能需求的融合、教学过程与实际工作过程的对接,提高机电类专业教学质量,为我国产业转型升级及产业发展做出贡献。
三、竞赛内容(一)工作内容机电一体化设备组装与调试采用理实一体的竞赛方式,具体的工作任务有:1.按组装图组装机电一体化设备和相关模块及部件;2.根据机电一体化设备的电气控制连接电路,结合工作任务的要求实现设备的电气控制,并按实际情况绘制电路原理图;按设备的网络拓扑图连接网络,实现设备各部件之间的通信;3.按机电一体化设备的气动系统图连接的气路;4.根据机电一体化设备的工作说明和要求编写PLC控制程序,工业机械手程序优化及调试,设置变频器、步进驱动器以及伺服驱动器参数;5.制作触摸屏页面,设置通信参数,实现机电一体化设备的人机交互;6.对机电一体化设备进行调试,达到任务书规定的工作要求和技术要求;7.填写机电一体化设备组装与调试记录。
(二)成绩比例表1:成绩比例序号评分项分值比例对应工作任务1机械部件组装与设备安装25%1,62电路安装与电路图绘制15%2,63气动系统安装5%3,64机电一体化设备功能45%4,5,65工作过程评分10%7(三)完成工作任务时间机电一体化设备组装与调试工作任务分为两个任务,完成工作任务的时间分配为:任务一,6小时;任务二,6小时。
PLC可编程控制器应用技术作业4

学习目标:●掌握PLC的基本指令●能够用常用基本指令进行简单梯形图设计●掌握CPM1A的子程序指令、中断控制指令、步进指令功能第四章SYSMAC-C系列指令系统第一节SYSMAC-C系列指令SYSMAC-C系列各种指令的分类表示方法如下所述:1、按指令长度分类:单字指令、双字指令、三字指令、四字指令2、按操作数的特点分类:位操作数、字节操作数、字操作数、双字操作数、多字操作数3、按I/O、I/R、TIM/CNT通道编码位数分类:两位数通道编码、三位数通道编码4、按使用情况分类:基本逻辑指令、功能指令5、按具有前沿微分功能分类:大多数指令可以使用前沿微分(DIFU)功能,只要在该指令前加@即可。
第二节SYSMAC-C系列CPM1A型机指令系统一、基本指令1、LD:LD指令表示常开触点与左侧母线连接;指令格式:LD XXXX操作数XXXX为继电器号2、LD NOT :LD NOT指令表示常闭触点与左侧母线连接指令格式:LD NOT XXXX操作数XXXX为继电器号3、AND指令表示常开触点与前面的触点电路相串联;指令格式:AND XXXX操作数XXXX为继电器号4、AND NOT指令表示常闭触点与前面的触点电路相串联。
指令格式:AND NOT XXXX操作数XXXX为继电器号5、OR指令表示常开触点与前面的触点电路相并联;指令格式:OR XXXX操作数XXXX为继电器号6、OR NOT指令表示常闭触点与前面的触点电路相并联指令格式:OR NOT XXXX操作数XXXX为继电器号7、OUT指令输出运算结果;指令格式:OUT XXX操作数XXXX为继电器号例:8、AND LD指令用于逻辑块的串联连接,即对逻辑块进行逻辑“与”的操作。
方法1方法2LD 00000 LD 00000AND 00001 AND 00001OR NOT 00002 OR NOT 00002LD 00003 LD 00003OR 00004 OR 00004AND LD LD 00005LD 00005 OR NOT 00006OR NOT 00006 AND LDAND LD AND LDOUT 20000 OUT 20000在方法2中,AND LD指令之前的逻辑块数应小于等于8,而方法1对此没有限制。
《可编程控制器原理及应用》课程教学大纲概要
《可编程控制器原理及应用》课程教课纲领一、课程基本信息1、课程代码: EE4262、课程名称(中 / 英文):可编程控制器原理及应用Principles of PLC (Programmable logic Controller) And Application3、学时 / 学分: 36/24、先修课程:电路,电子技术(模电,数电,单片机),自动控制理论5、面向对象:电气及其自动化6、开课院(系)、教研室:电力电子及电力传动7、教材、教课参照书:教材名称、作者、译者、第一版社、第一版时间教材:可编程控制器原理与应用(电子教课设计)参照书:可编程控制器原理及应用华南理工二、课程性质和任务本课程作为机械,电气类专业基础技术课程,是一门实践性很强且很适用的课程,旨在培育机电一体化工程技术人材。
本课程以日本三菱企业FX2N 系列 PLC 为目标机型,简述了PLC 的发展史及发展趋向,介绍了PLC 的硬件,软件架构及工作原理,编程语言,编程方法以及典型应用实例,并联合PLC 基础实验及设计性实验,使所学的理论知识通过实践加以稳固并理解,使帮助初学者很快入门地,并掌握PLC 的编程方法及系统的设计流程,硬件配置,软件设计。
三、教课内容和基本要求教课内容:第一章概括第二章PLC 工作原理及构造特色第三章基本逻辑指令第四章步进顺控指令第五章功能指令第六章PLC 组成的控制系统的设计与应用课时分派3 学时4 学时4 学时5 学时5 学时3 学时四、实验(上机)内容和基本要求实验一PLC 入门 2 学时实验二基本元件的编程 3 学时实验三特别元件编程 2 学时实验四交通灯控制的程序设计 2 学时实验五搅拌器控制的程序设计 3 学时应达到的教课要求:1、认识 PLC 的工作原理,软件与硬件的基本架构。
2、熟习 PLC 中软元件,基本指令,功能指令的应用。
3、掌握梯形图,指令表,SFC,逻辑图的常用编程语言及编程方法4、经过实践 (PLC 实验 )熟习 PC 的 GPP 软件的使用及 PLC 的正确使用方法。
可编程控制器实验指导书

可编程控制器实验指导书华东交通大学二零零五年九月前言可编程序控制器(PLC)已经广泛应用于工业生产过程的自动控制领域,使得工业自动化程度和生产效率得到极大的提高。
作为一门实验性很强应用技术课程,PLC的实验教学环节至关重要。
为了加深对PLC的基本原理和使用方法的理解和运用,熟悉可编程序控制器的使用和操作方法,加强梯形图、指令表、步进顺控等编程语言的学习和应用能力,培养动手能力,掌握PLC控制系统的设计方法,只能通过做实验进行实际操作,才能学通学透可编程序控制技术。
本实验指导书是针对《可编程序控制器实验大纲》制定。
实验二至实验五为设计性实验,实验一和实验六为演示性实验。
其中实验六作为选择性实验可以根据需要选做。
实验一,编程器的操作使用一,实验目的通过实验了解和熟悉FX2N-48MR型PLC的外部结构和外部接线方法。
了解和熟悉FX2-20P简易编程器及其FXGP-WIN-C编程软件的使用方法。
通过一些简单程序的写入和模拟运行,了解写入和编辑程序的方法,以及对PLC进行监控的方法。
二,实验装置1.FX-48MR型PLC 1台2.FX-20P简易编程器 1 台3.FXGP-WIN-C编程软件1套4.THPLC-C可编程序控制器教学实验设备1台三,实验内容本实验可以结合以下基本逻辑指令实验一起操作。
1、验证课本上图3-9程序,将程序输入PLC,验证输出结果;2、编程实现下述要求,并调试通过。
a. 走廊灯两地控制实验:不同地方的两个开关可以独立控制同一盏灯。
b. 走廊灯三地控制实验:不同地方的三个开关都可以独立控制同一盏灯。
四,实验步骤1. FX-20P简易编程器的操作使用1)程序的写入、检查和修改:将编程器用电缆接到PC上,接通PC电源,PC的运行开关拨到STOP位置,首先清除用户程序存储器的内容,方法:逐条指令的清除:INS-DEL-GO指定范围的清除:RD-WR-STEP-指令序号-SP-STEP-指令序号-GO全部范围清除:RD-WR-NOP-A-GO-GO写入程序方法:RD-WR-LD-X-0-GO(例)RD-WR-OUT-T-0-SP-K-1-0-GO(例)2)指令的删除、插入和修改删除(光标所对应的指令):INS-DEL-GO插入(光标所在指令之前):INS-指令-GO修改(光标所对应的指令):RD-WR-指令-GO3)程序的模拟运行写完程序后,将PC的运行开关拨到RUN位置上,若PC上的PROG-E灯没有闪烁,则说明写入的程序没有错,用户程序开始运行,观看并记录实验现象(此时已经接好对应实验的I/O外部接线)。
PLC基本指令及编程

A=X0 A=X0*X1 B=X2 B=X2*X3 A=X0*X1+X2*X3 B=/X4
6
7 8 9 10
对B与运算
ORB指令:A=A+B,B放弃 OUT指令,将A赋给Y6,A放弃但A值未改变。 LD指令,A被刷新=X0
B=/X4*X5
A=X0*X1+X2*X3+/X4*X5 Y6= X0*X1+X2*X3+/X4*X5 A=X0 ……
9
ANB 指令“块与” 串联连接接点块。 把以LD或LDI指令开始的接点块串联到该块前的接点或块上 ANB指令后不带编号。 连续使用不能多于7次。
ANB X0 X2 X3 ANB X4 Y0 X1 X5 X6 X7 X10 Y1 ANB (a)ANB指令的应用 X0 X1 X2 X3 X4 Y0 X5 X6 X7 (b)梯形图的一般画法 X10 Y1 0 1 2 3 4 5 6 7 8 9 10 11 12 13 LD OR LD OR ANB LD OR ANB OUT LD OR ANB AND OUT X0 X1 X2 X3 0 1 2 接点组 3 4 X4 5 接点组 X5 6 7 Y0 8 X6 9 接点组 X7 10 11 X10 12 Y1 13 LD OR LD OR ANB LD OR ANB OUT LD OR AND ANB OUT X0 X1 X2 X3 X4 X5
X3 END
工作台往返控制PLC程序梯形图 1
14
X0 停
X7 保 护 M
X1 Y0 X4 X2 Y1 X3ຫໍສະໝຸດ X2X3X5
Y1 Y0 互 锁
自 锁 换 向 X1 X4 X6
X0
X7
Y0 Y1
可编程序控制器第四章1s7-200的部分功能指令

L
~220V N
可编程控制器原理及应用
大
包
小
装
包
计停启
装
数止动
选限脉按按
择位冲钮钮
SB3 SB2 SB1
N L L+
I0.4 I0.3 I0.2 I0.1 I0.0
1L
KH
Q0.4 Q0.3 Q02 Q0.1 Q0.0
包送 装料 带电 电动 动机 机
17
可编程控制器原理及应用
输入/输出端口分配表
38
可编程控制器原理及应用 传送字节立即写指令的语句表表示
操作码:BIW
构
成 源操作数起始地址IN 目标操作数起始地址OUT
BIW IN, OUT
39
可编程控制器原理及应用
传送字节立即写指令的原理
MOV_BIW EN ENO
当EN=1时
IN OUT
原 指令将IN输入端指定字节地址的内容写入输出端 理 OUT指定字节地址的物理输出点(QB)
址的存储单元中去
操作数数据类型为字节型(BYTE)
37
可编程控制器原理及应用
传送字节立即读(BIR)、写(BIW)指令 传送字节立即写指令的梯形图表示
指令标识符MOV_BIW
MOV_BIW EN ENO
IN OUT
使能输入端EN
构
成 使能输出端ENO 源操作数地址输入端IN
目的操作数地址输出端OUT
4
可编程控制器原理及应用
4.1
传送指令
数据传送指令 数据块传送指令 交换字节指令 传送字节立即读、写指令
5
可编程控制器原理及应用
数 字节传送指令MOVB
据 传
可编程控制器技术课程标准优选全文

最新精选全文完整版(可编辑修改)《可编程控制器技术》课程标准1.前言1.1课程性质在高职机电一体化技术专业中,《可编程控制器技术》是一门职业技能专业核心课程。
与中职《可编程控制器原理及应用》有衔接关系,中职课程是本课程的学习基础。
本课程具有很强的理论性和实践性,对后续专业课程的学习至关重要;同时与学生将来从事的专业工作有着密切的联系,是机电一体化技术专业必备的技能和知识。
学生学完本课程能根据未来工作任务要求,独立完成小型或者合作完成复杂的PLC控制系统的设计、安装、调试工作,包括:进行产品控制功能分析、选择控制方案和PLC元器件选型、绘制电气原理图、编写PLC程序;安装电气元器件、完成系统调试、进行系统功能评价等。
在此之前,学生进行了《计算机应用》、《电工电子技术》、《电机与电气控制》等课程,具备了初步电气基础知识和实践技能,为本科学习奠定基础。
同时,本科也为后续课程《柔性制造系统实训》、《机电设备安装与调试》、《工业机器人技术基础》起到支撑作用。
1.2设计思路本课程的以“职业化”能力培养为目标,以项目课程为主体,培养学生的知识技能和自主学习创新能力,围绕工作任务完成的需要来选择和组织课程内容,突出任务与知识、技能的联系,让学生在职业化实践活动的基础上掌握知识,增强课程内容与职业岗位能力要求的相关性,提高学生的独立思考和实践动手与创新能力。
参照《维修电工国家职业标准》等国家职业标准,遵循学生的知识技能成长规律,依照课程培养目标和知识技能点重新整合、序化课程内容,选择合适的控制项目载体。
2.课程目标通过本课程的学习,学生应具备以下素养、知识、技能和能力:2.1素质目标2.2知识目标3.课程内容与要求3.1教学内容选取依据课程组教师依据专业典型工作任务,结合《可编程控制器(PLC)系统设计师职业标准》、《维修电工国家职业标准》,确定课程培养任务和培养目标,并提取和提炼本课程重要知识点和技能点,遵循学生的知识技能成长规律,重新进行教学内容的选取、整合、序化。
三菱PLC步进指令SFC编程方法功能指令表

指
63
INCD
增量值式凸轮顺控
令
64
TTMR
示教定时器
65
STMR
特殊定时器
66
ALT
交替输出
67
RAMP
斜坡信号
68
ROTC
旋转台控制
69
SORT
数据排序
70
TKY
10键输入
7l
HKY
16键输入
72
DSW
数字开关
第10页/共109页
外
73
部
74 75
设
76
备
77 78
79
80
81
82
83
84
85
RET指令用于返回主母线,其梯形图符号为
RET
。
第20页/共109页
STL指令的编程方法
STL指令
第21页/共109页
梯形图
STL指令的特点:
1. 与STL触点相连的触点应使用LD/LDI指令 。 2. STL触点可以直接驱动或通过别的触点驱动 Y、M、S、
T等元件的线圈,STL触点也可以使Y、M、S等元件置 位或复位。
校验码 读变量 变量整标 PID运算
第11页/共109页
功能指令简表
实数处理
110 ECMP 实数比较 111 EZCP 实数区间比较
118 EBCD 浮点数一科学 记数变换
119 EBIN 科学记数一浮 点数变换
120 EADD 实数加法 121 ESUB 实数减法 122 EMUL 实数乘法 123 EDIV 实数除法
与
12
MOV
比
13 14
SMOV CML
三菱PLC使用手册
三菱PLC使用手册三菱 FX2N 可编程控制器使用手册一、可编程控制器的内部编程元件1、输入继电器 X: X000~X017共16点2、输出继电器 Y: Y 000~Y017共16点3、辅助继电器 M:1)通用辅助继电器M0~M499 共 500 点2)断电保持继电器M500~M3071 共 2572 点3)特殊辅助继电器M8000~M8255 共 256 点4、状态继电器 S:S0~S499共500点1)初始状态继电器S0~S9 共 10 点2)回零状态继电器S10~S19共 10 点,供返回原点用3)通用状态继电器S20~S499共 480点4)断电保持状态继电器S500~S899共400点5)报警用状态继电器S900 ~S999共100点5、定时器 T: T0~T255共256点1)常规定时器 T0 ~ T255共256点T0~ T199为 100ms定时器,共 200 点,其中 T192~T199 为子程序中断服务程序专用的定时器。
T200~T245 为 10ms定时器共 46 点2)积算定时器 T246 ~T255 共 10 点T246~T249 为 1ms积算定时器共4点T250~T255 为 100ms积算定时器共6点6、计算器 C :C0~ C234共235点1)16 位计数器C0 ~ C199共200点其中 C0~C99 为通用型共 100 点C100~C199为断电保持型共100 点2)32 位加 / 减计数器 C200~ C234 共 35 点其中 C200~ C219为通用型共 20 点C220~C234为断电保持型共15 点7、指针 P/I1)分支用指针 P0~P127 共 128 点2)中断用指针 I XXX共 15 点其中输入中断指针 100~ 150 共 6 点定时中断指针 16~18共3点计数中断指针 1010~1060共6点8、数据寄存器 D1)通用数据寄存器D0~D199 共 200 点2)断电保持数据寄存器D200~D7999其中断电保持用 D200~D511 共 312 点不能用软件改变的断电保持D512~D7999 共7488 点,可用RST 和 ZRST指令清除它的内容。
1.3.1-3 《可编程控制器》课程教学大纲

《可编程控制器》课程教学大纲课程名称:可编程控制器课程代码:70312012学时:56(理论28学时,实践/操作28学时)学分:3.5学分先修课程:电工与电气测量技术适用专业:机械制造与自动化开课学期:第三学期开课系部:机电工程系一、课程性质和任务《可编程序控制器》课程是数控技术专业的一门专业必修课程。
本课程是培养学生从事数控机床维修工作所需的专业基本技能和职业素质的核心课程,其目标是通过对相关知识模块的学习和技能操作的训练,通过实践任务的引领,培养本专业学生掌握可编程控制器的工作原理,程序设计方法及安装与维护的操作技能;培养学生的综合职业能力和职业素养;独立学习及获取新知识、新技能、新方法的能力;与人交往、沟通及合作等方面的态度和能力。
二、课程培养目标1.能力目标(1)掌握PLC的硬件选型与安装接线方法;(2)掌握PLC编程软件的使用方法;(3)掌握PLC仿真软件的使用方法;(4)掌握PLC程序的编译与调试的方法;(5)掌握提高PLC控制系统可靠性措施的方法;(6)掌握PLC控制系统的故障检测与诊断方法;(7)常用基本控制电路的安装与使用;(8)典型机床控制电路的故障检修与使用维护2.知识目标(1)掌握PLC的基本概念与组成;(2)掌握PLC的工作原理与硬件结构;(3)掌握PLC的数据类型与寻址方式;(4)掌握PLC位逻辑指令的使用方法;(5)掌握PLC定时器与计数器指令的使用方法;(6)掌握PLC梯形图程序的经验设计法;(7)掌握顺序控制设计法顺序功能图的绘制;(8)掌握使用起保停电路的顺序控制梯形图设计法;(9)掌握以转换为中心的顺序控制梯形图设计方法;(10)掌握使用SCR指令的顺序控制梯形图的设计方法;(11)掌握PLC功能指令的使用方法;(12)掌握S7-200的通信指令与通信功能;(13)了解PLC与变频器连接使用的方法。
3.素质目标通过按照知识结构划分的项目教学方法,可以锻炼学生的团队合作能力、专业技术交流的表达能力;制定工作计划的方法能力;获取新知识、新技能的学习能力;解决实际问题的工作能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
10
4.1.2 顺序功能图 有向连线(状态转移路线和方向): 从上到下、 从左到右的步间连线,或非前两方向则为加箭头的 步间连线。 转移(分割两个相邻步):有向连线上与其垂直的 短线。 转移条件:与转移相关的逻辑条件,用文字、布尔 代数表达式、图形符号标于转换短线旁。
动作(或命令):命令是指控制要求,动作是指输 出驱动
东西 信号 时间 信号 时间 绿灯亮 10 s 绿灯闪亮 3s 红灯亮 15 s 黄灯亮 2s 绿灯亮 10 s 红灯亮 15 s 绿灯闪亮 3s 黄灯亮 2s
南北
49
4.1.4 实例编程
起动/停止 X000 Y000 COM0 Y001 COM1 Y002 COM Y003 COM2 Y004 Y005 COM3 南北黄灯 南北红灯 东西黄灯 东西绿灯 南北绿灯 东西红灯
S20 X000 S21 X001 S22 X004 S50 S24 S23 X002 S25 X003 S26
移时,多个分支的转移
均相同 条件满足时,多个分支 同时被激活 被激活的多个分支必须
都完成且转移条件均满
足时,进行并行性分离
重复与循环
17
4.1.2 顺序功能图 编程方法:(1)应用起保停电路的方法
39
4.1.4 实例编程
40
4.1.4 实例编程
S0
M8002 SQ1
送料小车控制
甲地SQ1 乙地SQ2 丙地SQ3
X0
S20
T0
T0
甲地装货 K100
S21
SQ2
Y0 右行 T1 K100
T1 乙地卸货
S22
甲地SQ1
乙地SQ2
丙地SQ3
S23
SQ1
Y1 T2
T2
左行 甲地装货 K100
S24 S25
命令与动作
S21
驱动处理
S21 X1 S22
Y0
Y0 X1
SET S22
转换及转移条件
下一状态
转换条件
转换目标
22
4.1.3 步进指令 单流程SFC与STL
23
4.1.3 步进指令 选择性分支与汇合SFC与STL
24
4.1.3 步进指令 并行性分支与汇合SFC与STL
25
4.1.3 步进指令 跳转、分离、重复与循环SFC与STL
车道黄灯 K100 车道红灯 T3
T1 Y2
S32 S33
K5 人行道绿灯 T5 K5
S23
T2 K50
Y4
C0 K5
C0 — C0
S33
T6
Y3
T6
人行道红灯 K150
RST C0
48
4.1.4 实例编程 红绿灯控制
信号灯的动作受开关总体控制,按一下启动按钮,信号 灯系统开始工作,并周而复始地循环动作;按一下停止 按钮,所有信号灯都熄灭。
S20
T0 X001
T0
S21
SQ3
Y0 右行 T1 K100
T1 丙地卸货
S31
SQ1
Y1 T2
T2
左行 甲地卸货 K100 左行
S22
S32 S33
SQ2
S23
SQ2
Y1
左行
Y0
S40
T3
T3 K10
43
4.1.4 实例编程 大小球自动分拣
44
4.1.4 实例编程
45
4.1.4 实例编程
8
4.1.2 顺序功能图
S2
初始状态
XO 启动
步(状态)
Y0
下降
S20
X1 下限位
有向连线
转移
S21
X2 已加紧
Y1
加紧
转移条件
动作(命令)
S22
X3上限位
Y2
上升
9
4.1.2 顺序功能图 步(状态):指控制系统的一个工作状态
初始状态:系统等待启动或相对静止的状态 • 可以有动作,也可以没有动作 • 至少有一个步,用双线矩形框表示 活动状态:被激活的状态,其动作得到执行 • 可以有一个或几个激活状态 • 前一个状态一定要处于非激活状态
37
4.1.3 步进指令 注意事项:(7) “紧急停止”的处理
38
4.1.4 实例编程 电机M1、M2、M3分别由KM1-KM3控制,各自由 SB1-SB3起动按钮启动,要求前一个电机起动后, 才能起动后一个电机,后一个电机又使前一个停止 。可循环往复进行
KM1 M1起动 M2起动 SB2 M3起动 SB3 停止 X003 SB3 COM X002 SB1 X000 X001 Y004 Y005 Y006 COM3 AC 220V KM3 KM2 M2 M3 M1
13
4.1.2 顺序功能图 单流程结构
S0 M8002
每个状态后面只有 一个转移 每个转移后面只有 一个状态
S20
X001 Y000 X002 X005 S21 X003 Y006 S22 X004 Y003 C Y001 Y002 B A
14
4.1.2 顺序功能图 选择性分支与汇合
只能满足一个分支转
针对定时器和计数器,相邻两步因为会被同时 激活,输出线圈不断电,故不能使用同一编号
29
4.1.3 步进指令 注意事项:(4)状态内指令的使用
STL的状态母线与梯形图左母线或MC子母线
一样,第一个触点用LD/LDI STL状态母线可以直接驱动输出,也可以经过 触点后再驱动输出,其他两者不行 STL状态母线内不能使用MC/MCR指令
30
4.1.3 步进指令 注意事项:(4)状态内指令的使用
STL状态母线后不能直接使用堆栈指令
只有在应用LD/LDI后才可以使用堆栈指令
31
4.1.3 步进指令 注意事项:(4)状态内指令的使用
转移条件支路中,不可使用电路块和堆栈指令
转移条件一般为简单的开关量或定时器计数器 过于复杂的转移条件,可应用辅助继电器M
46
4.1.4 实例编程 人行道控制
Y3:红 Y4:绿 X1 Y0:红 Y1:黄 Y2:绿
X0
47
4.1.4 实例编程
M8002 车道绿灯 S0 X0+X1
Y2
Y3
人行道红灯
S21
T0
Y2 T0 Y1
T1
车道绿灯 K300
S30
T2
Y3 Y4 T3 T4
T4
人行道红灯 人行道绿灯 K150
S31 S22
X001 [S·] [D·] FNC 45 MEAN D0 D4Z0 n K3
Y0 右行
SQ3
甲地SQ1
乙地SQ2
丙地SQ3
S26
T3 K100
T3
丙地卸货
甲地SQ1
乙地SQ2
丙地SQ3
S27
SQ1
Y1
左行
41
4.1.4 实例编程 送料小车控制
甲地 乙地 丙地
甲地 乙地 丙地
???
丙地
甲地
乙地
甲地
乙地
丙地
乙地 丙地
甲地
甲地 乙地 丙地
42
4.1.4 实例编程
M8002 SQ2 S0 X0 乙地装货 K100 T0 X001
经验设计法 基于时序图的设计法 基于逻辑表达式的设计法
5
4.1.1 顺序控制的概念 问题提出:送料小车控制系统
甲地SQ1 乙地SQ2 丙地SQ3
控制输出? 记忆功能?
甲地SQ1
乙地SQ2
丙地SQ3
甲地SQ1
乙地SQ2
丙地SQ3
甲地SQ1
乙地SQ2
丙地SQ3
6
4.1.1 顺序控制的概念 经验设计法
18
4.1.2 顺序功能图 编程方法:(2)应用置位/复位指令的方法
注意:不能将输出继电器 线圈与SET/RST并联
19
4.1.2 顺序功能图 编程方法:(3)应用步进顺控指令的方法
也称步进梯形指令
或简称步进指令
20
4.1.3 步进指令
STL S0
步进梯形指令构成一个步进点,当STL指令出现在程序中, 代表程序进入以步进流程控制的步进梯形状态
S20 X000 S21 X001 S22 X002 S50 S32 X012 S31 X011 X010 X020 S41 X021 S42 X022
移条件
状态转移到该分支执 行,其他分支转移条 件不能同时满足 汇合时也只能从该分
支进行选择性汇合
15
4.1.2 顺序功能图 并行性分支与汇合
由单流程向多个分支转
M2 M3 M4
54
4.1.4 实例编程
55
4.1.4 实例编程 四台电机顺序起停
按下起动按钮,M1-M4每隔3s时间顺序起动 按下停止按钮,M4-M1每隔1s时间分别停止
如果在起动过程中,按下停止按钮,电动机仍 然按照逆序进行停止
56
4.1.4 实例编程
57
4.2 功能指令
4.2.1 功能指令的基础知识 基本格式
直接采用梯形图编程,试图用输入去控制输出。如果不 行,加些辅助条件。
顺序控制设计法(也称步进控制设计法)
用顺序功能图(SFC,Sequential Function Chart)设计, 再把功能图翻译成梯形图。
顺序控制设计法特点:
• 简单易学;
• 设计效率高;
• 调试、修改和阅读方便。
7
4.1.2 顺序功能图 顺序控制的全部过程,可以分成有序的若干步 (STEP),各步都有自己应完成的动作(ACTION)。 从上一步转移到下一步,一般都是有条件的,条件 满足则上一步动作结束,下一步动作开始,同时上 一步的动作会被清除 这就是顺序功能图(SFC)的设计概念 亦称状态转移图或功能表图