ERV_控制箱使用说明书
ERV阀技术标准

Q/CDT 宁夏大唐国际大坝发电公司企业标准Q/CDT-DBpc.-2008(压力控制泄放阀)技术标准2008-00-00编制2008-00-00发布(宁夏大唐国际大坝发电公司)发布目次前言 (1)1 范围 (1)2 引用文件和资料 (1)3 概述 (1)4 设备参数 (1)5 零部件清册 (1)6 检修专用工器具 (2)7 检修特殊安全措施 (2)8 维护保养 (2)9 检修工序及质量标准 (3)10 检修记录 (6)前言为实现企业设备技术管理工作规范化、程序化、标准化,制定本标准。
本标准由(设备工程部)提出。
本标准由设备工程部归口并负责解释.本标准起草单位:本标准主要起草人:本标准是首次发布。
(ERV阀门)技术标准1 范围本标准规定了(ERV 压力控制泄放阀)的概述、设备参数、零部件清册、检修专用工器具、检修特殊安全措施、检修工序及质量标准、检修记录等相关的技术标准。
本标准适用于的技术管理工作。
2 引用文件和资料下列文件中的条款通过本标准的引用而成为本标准的条款.凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。
凡是不注日期的引用文件,其最新版本适用于本标准.Crosby ERV型压力操纵泄放阀安装,运行及维修说明书■《阀门检修工艺规程》的2。
2《火力发电厂锅炉检修技术培训》注2。
3《中华人民共和国工人技术标准》■《电业安全工作规程》热力和机械部分3 概述ERV压力控制是一个大容量、动力驱动压力泄放阀。
运行方式为电力控制、先导操作以及压力负载.通过压力传感器提供的压力信号控制阀上的电磁线圈动作,泄放可在2%~10%范围内调节回座压差。
泄放阀也能通过一个三位面板开关进行手动操作。
ERV压力控制泄放阀一般安装在过热器联箱上,带有一个隔离阀,隔离阀安装于泄放阀与联箱之间。
4 设备参数4.1 技术规范5 零部件清册6 检修专用工器具7 检修特殊安全措施7.1 解体阶段安全措施7。
Quick 8802 系列数控伺服控制系统使用说明书
Quick 8802 系列数控伺服控制系统使用说明书 Digital Servo Control System Operation Manual安全操作指南 General safety instructions在使用前,一定要仔细阅读本操作指南与所搭配的缝制机械说明书,配合正确使用,并须由接受过专业培训的人员来安装或操作。
在使用或安装本机器时,请注意下列事项。
Please read this manual carefully, also with related manual for the machine head before use. For perfect operation safety , i nstalling and operating this product by trained personnel is required. When install and operate this product, precaution must be taken as following.1 .请尽量远离电弧焊接设备或电波发射器等,以免产生的电磁波干扰本控制器而发生误动作。
2 .请不要在室温 45 °C 以上或者 0 °C 以下的场所使用。
3 . 请不要在湿度 30 % 以下或者 95 % 以上或者有露水和酸雾的场所使用。
4 .安装控制箱及其他部件时,请先关闭电源并拔掉电源插头。
5 .为防止干扰或漏电事故,请做好接地工程,电源线的接地线必须以牢固方式与大地有效连接。
6 .所有维修用的零部件,须由本公司提供或认可,方可使用。
7 .修理及保养作业,要请经过培训的技术员执行。
在进行任何保养维修动作前,必须关闭电源并拔掉电源插头。
控制箱里有高压危险,必须关闭电源五分钟后方可打开控制箱。
8 .本手册中标有 符号之处为安全注意点,必须注意并严格遵守,以免造成不必要的损害。
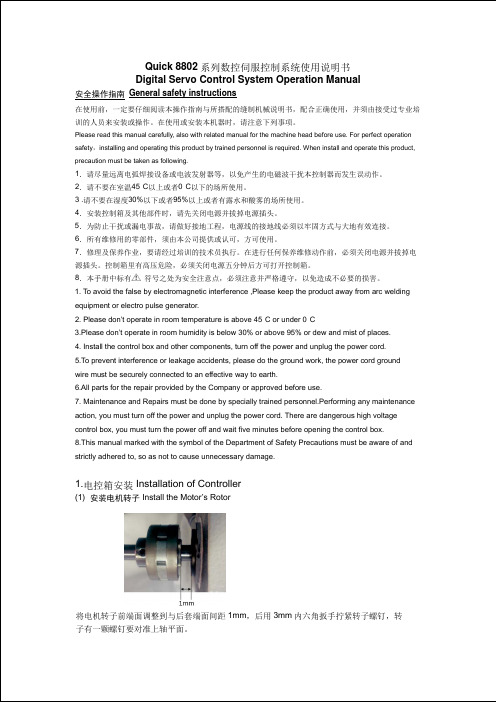
. To avoid the false by electromagnetic interference ,Please keep the product away from arc welding 1 equipment or electro pulse generator.2 . Please don’t operate in room temperature is above 45°C or under 0°C ·3 .Please don’t operate in room humidity is below 30% or above 95% or dew and mist of places.4 . Install the control box and other components, turn off the power and unplug the power cord.5 .To prevent interference or leakage accidents, please do the ground work, the power cord ground wire must be securely connected to an effective way to earth.6 .All parts for the repair provided by the Company or approved before use.7 . Maintenance and Repairs must be done by specially trained personnel.Performing any maintenance action, you must turn off the power and unplug the power cord. There are dangerous high voltage control box, you must turn the power off and wait five minutes before opening the control box. 8 .This manual marked with the symbol of the Department of Safety Precautions must be aware of and strictly adhered to, so as not to cause unnecessary damage.1. 电控箱安装 Installation of Controller(1) 安装电机转子 Install the Motor’s Rotor将电机转子前端面调整到与后套端面间距1mm ,后用3mm 内六角扳手拧紧转子螺钉,转 子有一颗螺钉要对准上轴平面。
H3C ER3100V101R004版本说明书

H3C ER3100V101R004版本说明书杭州华三通信技术有限公司H3C ER3100V101R004版本说明书关键词:ER3100 R003 发布摘要:此版本为路由器ER3100第四个正式发布版本,支持丰富的负载均衡、ACL等特性,提供web管理方式。
缩略语:缩略语英文全名中文解释VLAN Virtual Local Area Network 虚拟局域网ServiceofQoS Quality服务质量ACL Access Control List 访问控制列表目录1 版本信息 (4)版本号 (4)历史版本信息 (4)版本配套表 (4)2 版本使用限制及注意事项 (4)版本使用限制 (4)注意事项 (4)3 存在问题与规避措施 (5)4 解决问题列表 (5)4.1.1 问题一 (5)5 配套资料 (5)配套资料清单 (5)配套产品资料的获取方法 (6)6 版本升级操作指导 (6)通过WEB方式升级 (6)通过TFTP方式升级 (7)表目录表1 历史版本信息表 (4)表2 版本配套表 (4)表3 配套手册清单 (5)表4 从网站查询和下载资料的说明 (6)1 版本信息版本号版本号:ER3100V101R004历史版本信息表1历史版本信息表版本号基础版本号发布日期备注ER3100V100R001首次发布2007-06-15无ER3100V101R002 ER3100V100R001 2007-07-16增加了新特性,解决了上一版本部分问题ER3100V101R003 ER3100V100R002 2007-10-09增加了新特性ER3100V101R004 ER3100V100R003 2008-4-15 解决弹性带宽出借之后收不回问题版本配套表表2版本配套表产品系列H3C型号ER3100目标文件名称ER3100V101R004.bin备注无2 版本使用限制及注意事项版本使用限制无。
注意事项无3 存在问题与规避措施1. 问题 1首次发现版本:ER3100V100R001问题描述:访问控制规则添加过多会影响设备转发性能。
serv-u10.0.0使用说明
Serv-U10.0.0使用说明快速入门指南Serv-U设计的配置简单,其灵活性和控制功能使您得以在可能的最佳安全保护下与其他人方便地共享文件。
快速入门指南将帮助您安装服务器,创建首个域,并向新域中添加用户帐户。
一旦完成这些简单步骤,您就能连接到新的文件服务器并开始传输文件!安装如果您是首次安装Serv-U,只需遵照安装屏上的指令选择安装目录并配置桌面快捷方式,以便快速访问服务器。
您也可选择将Serv-U 作为系统服务安装,这意味着当Windows 启动时自动启动Serv-U——在任何用户登录服务器前。
如果Serv-U 运行于专用的服务器机器,且没有交互式用户会话定期登录该服务器时,该选项很有用。
如果Serv-U 未作为系统服务安装,则登录Windows 后需要手动启动该软件。
如果覆盖安装现有Serv-U,我们推荐首先备份原始安装文件夹。
尽管可以安全地覆盖安装任何现有的Serv-U 并对数据文件和二进制代码进行必要的升级,在升级前备份关键组件仍被视为良好的数据管理措施。
如果进行升级的安装版本早于7.0 版,将会出现提示对话窗,指出在版本6 后作出的关键更改,以及这些更改会如何影响您对Serv-U 文件服务器的管理。
一旦完成安装,将启动Serv-U 管理控制台。
如果选择安装后不启动S erv-U 管理控制台,可以通过双击系统托盘内的Serv-U 图标,或单击右键选择"启动管理控制台" 选项,来随时启动控制台。
创建首个域完成加载管理控制台后,如果当前没有现存域会提示您是否创建新域。
单击是启动域创建向导。
任何时候要运行该向导,可以单击管理控制台顶部或更改域对话框内的新建域按钮,从管理控制台内的任何页面都可打开更改域对话框。
在Serv-U 文件服务器上创建新域有3 个简单步骤。
第一步是提供唯一的域名。
ES系列控制器 安装和使用手册说明书

ES Series Controls: Installation & Usage Manual (Version 2.1, JN 2018)A. Installing ES Series Controls: Preliminary Considerations1.Your kit includes: 1 ES Series Control, 2 mounting screws, 1 wall plate with mounting screws.2.ES Series controls are designed, if desired, to mount into a standard single- or multiple-gang switchreceptacle box. You may wire ES Series controls in Series or Parallel.3.You may use a virtually unlimited number of ES “M” and “T” controls per installation.4.You can use ES Series controls with Nu-Air Windsor Series controls and a variety of othermechanical switches. Consult the HRV/ERV manual for details.5.As a safety precaution, ensure that the HRV/ERV is unplugged before connecting any controlwires to it.B. Procedure1. Use a narrow-tipped flat-head screwdriver to secure control wires into theterminal block located on the back of the ES Series control:12 VDC—RedB—YellowA—GreenGND—Black2. At the HRV/ERV, screw the control wires into the removable 4-wireterminal block, then secure the terminal block into the HRV/ERV circuitboard plug.3. Install the appropriate wall plate. A single-switch wall plate is suppliedwith your ES Series control.Use 4-strand wire.A. Usage: Background InformationEac h ES Series control is equipped with a touch pad and 3 LED’s. The touch pad is used to select mode of operation or turn the appliance off. The LED’s indicate which mode of operation the HRV/ERV is operating in. E S Series controls follow “master -slave” logi c in that the most recent one used controls the HRV/ERV. For example, if the M1 control is currently on Hi and you use an M2 control to select Lo (or any other mode), the M2 control will assume command of the HRV/ERV. You will notice that the LED on both controls will now flash Lo . When a “feature” mode is selected (i.e. Hi or 20 Lo/ 40 Stby or 20 Lo/ 40 Recirc .), all other mode controls will switch to standby.B. Usage: One Simple Step to Operation1. To use your ES Series control, gently tap the labeled touch pad:C. Easy Navigation and ControlYou may toggle between operation modes by simply tapping the touch pad.The control LED will switch to indicate the current mode of operation.When toggling between modes the LEDs will light in an upward, then downward pattern.You can turn your HRV/ERV on or off with the ES Series controls, simply by tapping the touch pad. No LED’s shining indicates that the HRV/ERV is off.ES Series Controls: Description of OperationsES-T1The ES-T1 Timer is meant to bring the HRV/ERV into high speed for 20, 40 or 60 minutes. As the internal clock on the control counts down, you will notice that the LED will “mov e down” as each 20-minutesegment is completed. If your municipality requires that the timer be capable of activating the ventilator even when the main controller is set to the OFF position, move the jumper on each timer to the position illustrated below. In this mode, the LED MIGHT TAKE UP TO 10 SECONDS to light when the timer is activated.ES-M1No LED: HRV/ERV is OFF. Stby: Unit is in standby, ready for a command. Lo: Unit operates in low speed continuously. Hi: Unit operates in high speed continuouslyES-M2No LED: HRV/ERV is OFF. Stby: Unit is in standby, ready for a command. Lo: Unit operates in low speed continuously. 20 Lo/40 Stby: Unit cycles between 20 minutes continuous low and 40 minutes standby.ES-M3No LED: HRV/ERV is OFF. Stby: Unit is in standby, ready for a command. Lo: Unit operates in low speed continuously. 20 Lo/40 Stby: Unit cycles between 20 minutes continuous low and 40 minutes recirculation. Factory Setting on “NORMAL” Field Setting on “DEHUM”。
ER系列工业机器人操作手册说明书

ER系列工业机器人操作手册(RCS2V1 16)修订记录目录修订记录 (i)目录 (i)前言 (vi)概述 (vi)本书常用词汇 (vi)符号约定 (vi)安全注意事项 (vii)第1 章安全................................................................................................................................... 1-11.1 保障安全 .............................................................................................................................................. 1-11.2 专门培训 .............................................................................................................................................. 1-11.3 机器人使用说明书清单....................................................................................................................... 1-11.4 操作人员安全注意事项....................................................................................................................... 1-21.5 机器人的安全注意事项....................................................................................................................... 1-31.5.1 安装及配线安全 .............................................................................................................................................. 1-31.5.2 作业区安全 ...................................................................................................................................................... 1-41.5.3 操作安全 .......................................................................................................................................................... 1-51.6 移动及转让机器人的注意事项........................................................................................................... 1-61.7 废弃机器人的注意事项....................................................................................................................... 1-6第2 章产品确认........................................................................................................................... 2-12.1 装箱内容确认....................................................................................................................................... 2-12.2 订货号确认 .......................................................................................................................................... 2-1第3 章安装................................................................................................................................... 3-13.1 搬运方法 .............................................................................................................................................. 3-13.1.1 用吊车搬运电控柜 .......................................................................................................................................... 3-13.1.2 用叉车搬运电控柜 .......................................................................................................................................... 3-13.2 安装场所和环境................................................................................................................................... 3-23.3 安装位臵 .............................................................................................................................................. 3-2第4 章配线................................................................................................................................... 4-14.1 电缆连接的注意事项........................................................................................................................... 4-14.2 供电电源 .............................................................................................................................................. 4-14.3 连接方法 .............................................................................................................................................. 4-24.3.1 连接供电电缆 .................................................................................................................................................. 4-24.3.2 连接示教编程器 .............................................................................................................................................. 4-2第5 章电源的接通与切断........................................................................................................... 5-15.1 接通主电源 .......................................................................................................................................... 5-15.1.1 接通主电源 ...................................................................................................................................................... 5-15.1.2 初始化诊断 ...................................................................................................................................................... 5-15.1.3 初始化诊断完成时的状态............................................................................................................................... 5-25.2 接通伺服电源....................................................................................................................................... 5-25.3 切断电源 .............................................................................................................................................. 5-35.3.1 切断伺服电源(急停) .................................................................................................................................. 5-35.3.2 切断主电源 ...................................................................................................................................................... 5-3第6 章动作确认........................................................................................................................... 6-1第7 章系统部件........................................................................................................................... 7-17.1 电控柜 .................................................................................................................................................. 7-17.2 电源单元 .............................................................................................................................................. 7-37.3 控制单元 .............................................................................................................................................. 7-37.4 伺服驱动单元....................................................................................................................................... 7-57.5 输入输出单元....................................................................................................................................... 7-67.5.1 耦合器EE-R00 ................................................................................................................................................ 7-67.5.2 数字输入ER-1311 ........................................................................................................................................... 7-97.5.3 数字输出ER-2341 ......................................................................................................................................... 7-127.5.4 I/O从站的安装与组网 ................................................................................................................................... 7-157.6 示教编程器 ........................................................................................................................................ 7-207.6.1 外观 ................................................................................................................................................................ 7-207.6.2 按键 ................................................................................................................................................................ 7-217.6.3 显示 ................................................................................................................................................................ 7-227.6.4 模式开关介绍 ................................................................................................................................................ 7-247.6.5 急停按钮介绍 ................................................................................................................................................ 7-257.6.6 伺服使能开关介绍 ........................................................................................................................................ 7-257.6.7 示教编程器内部的接线端子信号定义......................................................................................................... 7-267.6.8 示教编程器线缆 ............................................................................................................................................ 7-26第8 章操作说明........................................................................................................................... 8-18.1 机器人的坐标系................................................................................................................................... 8-18.1.1 坐标系种类 ...................................................................................................................................................... 8-18.1.2 关节坐标系 ...................................................................................................................................................... 8-18.1.3 直角坐标系 ...................................................................................................................................................... 8-28.1.4 工具坐标系 ...................................................................................................................................................... 8-38.2 示教 ...................................................................................................................................................... 8-48.2.1 急停的确认 ...................................................................................................................................................... 8-48.2.2 示教模式及安全性保证 .................................................................................................................................. 8-48.2.3 示教前的准备 .................................................................................................................................................. 8-48.2.4 示教的基本步骤 .............................................................................................................................................. 8-58.2.5 轨迹的确认 .................................................................................................................................................... 8-108.2.6 程序的修改 .................................................................................................................................................... 8-118.3 再现 .................................................................................................................................................... 8-128.3.1 再现前的准备 ................................................................................................................................................ 8-128.3.2 再现步骤 ........................................................................................................................................................ 8-128.3.3 停止与再启动 ................................................................................................................................................ 8-128.3.4 修改再现速度 ................................................................................................................................................ 8-14第9 章系统功能介绍................................................................................................................... 9-19.1 工程管理 .............................................................................................................................................. 9-19.1.1 新建工程或程序 .............................................................................................................................................. 9-19.1.2 删除工程或程序 .............................................................................................................................................. 9-29.1.3 重命名工程或程序 .......................................................................................................................................... 9-39.1.4 复制/粘贴工程或程序 ..................................................................................................................................... 9-39.1.5 加载/注销工程或程序 ..................................................................................................................................... 9-39.1.6 自启动程序 ...................................................................................................................................................... 9-49.2 程序编辑 .............................................................................................................................................. 9-69.2.1 新增指令 .......................................................................................................................................................... 9-69.2.2 撤销指令 .......................................................................................................................................................... 9-89.2.3 其它操作 .......................................................................................................................................................... 9-99.3 程序数据 ............................................................................................................................................ 9-129.3.1 新增变量 ........................................................................................................................................................ 9-129.3.2 标准区域变量 ................................................................................................................................................ 9-159.3.3 多边体区域变量 ............................................................................................................................................ 9-169.3.4 工具坐标系变量 ............................................................................................................................................ 9-179.3.5 用户坐标系变量 ............................................................................................................................................ 9-189.3.6 外部工具坐标系变量 .................................................................................................................................... 9-199.3.7 其它操作 ........................................................................................................................................................ 9-209.4 IO检测 ................................................................................................................................................ 9-229.5 位臵管理 ............................................................................................................................................ 9-249.6 系统日志 ............................................................................................................................................ 9-259.6.1 查看系统日志 ................................................................................................................................................ 9-259.6.2 查看和导出系统日志 .................................................................................................................................... 9-269.7 系统设臵 ............................................................................................................................................ 9-299.7.1 用户管理 ........................................................................................................................................................ 9-299.7.2 通用设臵 ........................................................................................................................................................ 9-309.7.3 高级设臵 ........................................................................................................................................................ 9-31第10 章变量介绍....................................................................................................................... 10-110.1 基本数据类型................................................................................................................................... 10-110.2 位臵数据类型................................................................................................................................... 10-310.3 系统数据类型................................................................................................................................... 10-810.4 IO数据类型 .................................................................................................................................... 10-1410.5 摆动数据类型................................................................................................................................. 10-1510.6 时钟数据类型................................................................................................................................. 10-1610.7 区域数据类型................................................................................................................................. 10-1710.8 PLC数据类型 ................................................................................................................................. 10-1810.9 码垛数据类型................................................................................................................................. 10-1910.10 SOCKET数据类型....................................................................................................................... 10-20第11 章指令介绍....................................................................................................................... 11-111.1 运动指令........................................................................................................................................... 11-111.2 控制指令......................................................................................................................................... 11-1811.3 等待指令......................................................................................................................................... 11-2211.4 IO指令 ............................................................................................................................................ 11-2311.5 设臵指令......................................................................................................................................... 11-2811.6 位臵运算指令................................................................................................................................. 11-3211.7 传送带跟随指令............................................................................................................................. 11-3311.8 位运算指令..................................................................................................................................... 11-4011.9 时钟指令......................................................................................................................................... 11-4111.10 区域指令....................................................................................................................................... 11-4211.11 视觉指令....................................................................................................................................... 11-4211.14 软浮动指令................................................................................................................................... 11-5011.15 数学运算函数............................................................................................................................... 11-5111.16 字符串指令................................................................................................................................... 11-5511.17 阵列指令....................................................................................................................................... 11-6011.18 ModbusTCP指令 .......................................................................................................................... 11-62第12 章高级功能....................................................................................................................... 12-112.1 多类型区域监控............................................................................................................................... 12-112.2 碰撞检测 .......................................................................................................................................... 12-512.3 振动抑制 .......................................................................................................................................... 12-612.4 传送带跟随....................................................................................................................................... 12-712.5 系统IP设臵................................................................................................................................... 12-1212.6 示教器升级与备份......................................................................................................................... 12-1512.6.1 示教器程序升级 ........................................................................................................................................ 12-1512.6.2 示教器程序备份 ........................................................................................................................................ 12-1812.7 控制器运行程序更新..................................................................................................................... 12-1912.7.1 控制器程序更新 ........................................................................................................................................ 12-1912.7.2 控制器程序还原 ........................................................................................................................................ 12-2012.7.3 备份导出 .................................................................................................................................................... 12-2112.7.4 工程导入 .................................................................................................................................................... 12-2312.8 一点到达功能介绍......................................................................................................................... 12-2412.9 工具坐标系标定............................................................................................................................. 12-2512.10 用户坐标系/外部工具坐标系标定.............................................................................................. 12-2912.11 外部TCP功能 ............................................................................................................................. 12-3212.12 一点对正坐标轴........................................................................................................................... 12-3412.13 伺服管理 ...................................................................................................................................... 12-3612.14 二维视觉的使用........................................................................................................................... 12-3912.15 三维视觉的使用........................................................................................................................... 12-4112.16 ModbusTCP ................................................................................................................................... 12-4412.17 锁机与解除................................................................................................................................... 12-4812.18 软浮动功能................................................................................................................................... 12-5212.19 九点标定功能............................................................................................................................... 12-5612.20 多工位预约................................................................................................................................... 12-5812.21 变位机功能................................................................................................................................... 12-6312.22 倒序执行 ...................................................................................................................................... 12-6712.23 伺服参数自调节功能................................................................................................................... 12-6812.24 跨腕部奇异功能........................................................................................................................... 12-6912.25 回零功能 ...................................................................................................................................... 12-6912.25.1 功能概述 .................................................................................................................................................. 12-6912.25.2 整体回零 .................................................................................................................................................. 12-7012.25.3 单轴回零 .................................................................................................................................................. 12-7012.26 保养提示 ...................................................................................................................................... 12-7312.27 Scara快速标定.............................................................................................................................. 12-7512.28 去限位块丢零保护功能............................................................................................................... 12-84第13 章附录............................................................................................................................... 13-113.1 示教器权限分配表........................................................................................................................... 13-113.2 ModbusTCP控制接口数据表 .......................................................................................................... 13-413.3 报警信息一览表............................................................................................................................ 13-7前言概述本文档适用于控制系统RCS2 V1.28,描述了ER系列机器人的构成及其示教控制器的操作,有助于使用者了解并能掌握ER系列机器人的操作和使用。
兰舍erv250说明书

兰舍erv250说明书新风系统品牌-兰舍新风系统ERV250系列全热交换主机型号:ERV250/350/550HD风量(m³/h):250~550尺寸(mm):704*530*270~900*630*340接口尺寸(mm):φ125~160电压:220V~50Hz售后:3年简介:•全热交换芯体,对于室内新风进行预冷预热处理,适用于不同环境•吊顶安装,可搭配中央空调使用,可远程控制•双向流送排风,送排风过滤,提供清新空气用户体验反馈:通过使用兰舍新风系统ERV250系列全热交换主机,您将获得——1.每天低不到一度电,即使不开窗,也能享受洁净的呼吸品质2.孩子和老人不易患呼吸系统疾病,冬春更健康3.从噪音判断,感受不到新风系统的存在4.轻松掌控室内空气状况,可随时调整系统运行模式产品功能:1.电机分控,随心更节能兰舍新风系统ERV250系列全热交换主机采高效风机产品,可实现分控技术:送风及排风可进行单独控制,方便用户根据实际情况调节换气效果。
新风系统品牌-兰舍新风系统,能帮助您实现最佳舒适度和最好的节能效果。
1.专利热交换芯产品,过滤效果更好,维护更方便还使用需要定期更换的热交换芯?兰舍新风系统ERV250系列全热交换主机采用专利产品康舒芯,保证高效热交换率的同时,还可重复进行水洗,无需重新购买新热交换芯。
1.双层滤网,自动报警空气环境愈发恶劣,多一层滤网,就多一层对家人呼吸的保障。
兰舍新风系统ERV250系列全热交换主机同时采用双层滤网,即银离子+LM14双层滤网,可更彻底地隔绝室外有害物质。
同时液晶控制器自带滤网报警功能,新风系统品牌-兰舍新风系统,时刻帮您监控滤网状态。
1.智能操控,状态一目了然兰舍新风系统ERV250系列全热交换主机配备的液晶显示器,能够实时显示室内温度,并有高中低三档风量可供选择,同时具有时段编程控制功能,满足不同时段的不同换气需求。
设计时尚大气,彰显品位。
1.WV导轨,高度防漏新风系统的密闭性是整个系统正常运行的关键,兰舍新风系统ERV250系列全热交换主机使用的机芯滤网一体WV型导轨设计,能够将内部气体泄漏的可能性降到最低,避免交叉污染。
ERV_控制箱现场问题

电磁泄放阀(ERV)控制箱现场问题1、阀门不动作1)判断电源是否接好,POWER灯是否亮。
2)判断开关是否闭合及保险是否完好。
3)若为气动,输入气源压力是否正常 (0.6MPA)。
4)LIMIT SWITCH &TORQUE SWITCH(电动)接线是否正确。
5)DCS OPEN,DCS CLOSE(DCS输入,无源脉冲,脉冲大于1秒)接线是否正确。
6)若配有远手操控制面板,则必须接上。
2、RED LION 仪表显示不正常1)开机时看仪表读数当无4-20mA输入信号时,仪表读数应为-25,若为0,则需进行输入标定。
(参照RED LION说明书)仪表显示值设置为传感器满量程的百分比传感器输出为4 mA 时,仪表显示值为0传感器输出为20mA时,仪表显示值为100(用户可根据情况更改显示设置)2)当有4-20mA输入信号时,若仪表读数没有跟随输入信号而变化,先判断4-20mA输入信号接线极性及信号源性质是否正确。
警告:* 4-20mA模拟输入信号必须为无源信号,否则RED LION仪表会烧毁。
若没有无源4-20mA模拟输入信号源,用有源输入,则接线需改动!!!** 输入信号范围:0-20mA,不要超范围3)当4-20mA输入信号正确时,若仪表读数仍没有跟随输入信号而变化,需判断RED LION仪表是否被误操作将仪表锁住,解决办法:① 恢复出厂设置,重新设置仪表。
② 若无法重新设置仪表,则将仪表后7、8短接线去掉,恢复出厂设置,重新设置仪表,再将7、8短接线接好。
③若仪表仍无变化,判断仪表输入端是否被烧毁:测量仪表输入端4、5输入阻抗应为20Ω,若为无穷大,则输入端已被烧毁。
补救措施:见《仪表修改图》,会降低精度调整仪表输入范围:0-10V输入调整仪表标定点: 传感器输出为 4 mA (2V)时,仪表显示值为0传感器输出为20 mA(10V)时,仪表显示值为100 其它设置不变3、控制箱输出CHOICE MANUAL、FULL OPEN、FULL CLOSE均为无源触点输出,有动作时触点闭合。
erv阀动作原理

erv阀动作原理
erv阀的工作原理基于流体力学原理。
当介质通过阀门时,阀门内部的阀芯会受到流体的压力作用,从而实现阀门的开启和关闭。
阀门
的开关可以通过手动操作或自动控制实现。
erv阀的原理可以简单描述为以下几步:
1. 开启阀门:通过手动或自动操作,使阀门内部的阀芯离开阀座,留出一定的通道,介质可以通过阀门流动。
2. 介质流动:介质受到外部压力作用,从高压区域流向低压区域,通过阀门的通道流动。
3. 关闭阀门:通过手动或自动操作,使阀芯重新与阀座接触,阻止介质继续流动。
ER系列工业机器人Walden网关配置手册说明书

ER系列工业机器人Walden网关配置手册RCS2 V1.00南京埃斯顿自动化股份有限公司南京埃斯顿机器人工程有限公司-本文档符合ISO体系要求,并会根据IPD体系变化更新-文档修订记录目录前言 (1)读者对象 (1)注意事项 (1)安全说明 (1)第1 章功能概述 (2)第2 章协议介绍 (3)2.1 PROFINET介绍 (3)2.2主要指标 (3)2.3硬件环境 ............................................................................................错误!未定义书签。
2.4功能配置 (4)第3 章网关调试说明 (5)3.1 硬件接线图 (5)3.2 Multiprog配置 (5)3.3西门子PLC配置 (9)前言本手册适用于控制系统RCS2 V1.27.00及以上版本,介绍埃斯顿ER系列机器人EtherCAT转ROFINET网关的功能调试和使用方法。
读者对象本手册仅供埃斯顿机器人相关技术支持人员使用。
注意事项⚫在安装和调试这些组件时,操作人员必须严格遵循本文档的说明和解释。
⚫相关负责人员必须确保所述产品的应用或使用满足所有安全要求,包括相关法律、法规、准则和标准。
⚫尽管本文档经过精心编制,但由于其中所描述的产品仍处于不断更新换代中,我们可能不会在每次更新后都检查文档中所描述的产品性能数据、标准或其它特性总是与实际产品相一致。
⚫本文档中难免会出现一些技术或者编辑错误,我们保留随时对文档信息做出修改之权力,恕不另行通知。
对于已经变更的产品,如果本文档中的数据、图表以及文字描述没有修改,我们将不再特别加以声明。
⚫任何人不得对软、硬件配置进行文本档中规定之外的修改,ESTUN公司对因此而造成的一切后果不承担任何责任。
⚫本文档中出现图示单位在没有特别标注说明时,默认单位为毫米mm。
安全说明第 1 章功能概述EtherCAT接口是指外部逻辑控制器通过标准EtherCAT协议与机器人通讯的一种通讯方式。
ER-T200 配电自动化站所终端(DTU)说明书
配电自动化站所终端(DTU)说明书北京一二科技有限公司目录1概述 (5)1.1 应用 (5)1.2 特点 (5)2 技术性能指标 (7)2.1 装置结构 (7)2.2 使用环境条件 (7)2.2.1 工作环境 (7)2.2.2 机械性能 (7)2.3 电气技术参数 (8)2.3.1 额定数据 (8)2.3.2 功率消耗 (8)2.3.3 过载能力 (8)2.4 主要技术指标 (8)2.4.1 交流采样 (8)2.4.2 遥信开入 (9)2.4.3 遥控输出 (9)2.4.4 电源 (10)2.4.5 可靠性 (10)2.5 电磁兼容 (10)2.5.1 静电放电 (10)2.5.2 高频电磁场 (10)2.5.3 电快速瞬变脉冲群 (11)2.5.4 浪涌 (11)2.5.5 阻尼振荡波 (11)2.5.6 交流电磁场 (11)2.6 绝缘耐压 (12)2.6.1 绝缘电阻 (12)2.6.2 绝缘强度 (12)2.6.3 冲击耐压 (12)3功能介绍 (12)3.1 遥控、遥测、遥信功能 (12)3.1.1 遥控功能 (12)3.1.2 遥测功能 (13)3.1.3 遥信功能 (14)3.2 参数设置功能 (15)3.3 电源失电保护功能 (15)3.4 对时功能 (15)3.5 自诊断功能 (15)3.6 历史记录及上报功能 (15)3.7 故障检测 (16)3.8 当地调试功能 (17)4 控制模块使用说明 (18)4.1 主处理器插件 (18)4.2 信号插件 (19)4.3 开出插件 (21)4.4 3U9I交流插件 (23)4.5 综合插件 (24)5 现场安装说明 (25)5.1操作流程 (25)5.1.1运行前检查 (25)5.1.2系统检测 (25)5.2注意事项 (25)5.3安装和二次回路的连接 (26)5.4附图 (26)1 概述1.1 应用ER-T200 配电自动化终端是针对目前应用越来越广泛的环网柜、开闭所等场所而开发的新一代产品,其采用高速采样芯片和32位高速单片机控制芯片相结合的新型高压开关控制装置,能快速稳定的完成对高压开关的监控。
3-VTI公司ERV电磁释放

ERV电磁释放阀门组件包括 ERV电磁释放阀门组件包括
两支球阀;一支阀门自动执行机构;一套 压力传感器件和一支控制箱组成。 如下图所示:
压力传感器应是为超临界设计的传感 单元,应接在运行和安装应和ERV阀门系 单元,应接在运行和安装应和ERV阀门系 统相连。传感器的压力感应端应安装在锅 炉的能够采集到系统实时压力的开阔容器 (管道)上以便能够采集读取系统任何状 况下压力的部位。压力传感系统上应避免 有冷凝物,防止导致其读取系统压力错误。 因此压力传感单元应做好防护工作。
阀门的结构及部件详解
项目 1 2 3 4 5 6 7 名称 阀球 密封圈 碟形弹簧 阀杆 格兰 格兰弹簧垫片 格兰螺母 项目 8 9 10 11 12 17 18 名称 格兰螺栓 端盖 阀体 阀体垫片 盘根 阀体螺栓 阀体螺母
控制箱主要是在现场调试以及现场维 护和检修时使用的信号控制部件,控制箱 和压力传感器合并称为控制系统。标准的 控制箱动力电源采用AC220V或者DC125V, 控制箱动力电源采用AC220V或者DC125V, 工厂也可根据客户的需求定制其它电源需 求模块。
ERV电磁(先导电磁释放)释放阀是系 ERV电磁(先导电磁释放)释放阀是系 统零泄漏的关键部件。ERV零泄漏电磁释 统零泄漏的关键部件。ERV零泄漏电磁释 放阀利用电动控制系统去监控和调节系统 压力。无论是在要求的释放能力上还是在 过压保护功能上,在许多工业领域为标准 的安全阀门提供可靠的释放保护,ERV电 的安全阀门提供可靠的释放保护,ERV电 磁释放阀门也具备综合的隔离作用,并且 为企业减少昂贵的成本支出。
恒压供水控制系统器说明书
一、系统概述VC-3200系列微电脑变频供水/补水控制器是专为变频恒压供水系统和锅炉及换热系统补水而设计的微电脑控制器,可与各种品牌的变频器配套使用。
具有压力控制精度高、压力稳定、第二消防压力(动压)设定、系统超压泄水自动控制、设定参数密码锁定等多项功能。
二、主要性能指标1.可编程设定多种泵工作方式,最多可拖五台泵(1变频+4工频);2.具有压力测量值防抖动补偿控制功能;3.参数调整和设定具有密码锁定及保护功能;4.采用人工智能模糊控制算法,设定参数少,控制精度高,带看门狗电路,采用数字滤波及多项抗干扰措施。
5.可接无源远传压力表、有源电压及电流型压力变送器;6. D/A输出控制频率电压为DC 0-10V, 也可设定为DC 0-5V;7.具有压力传感器零点和满度补偿功能;8.具有定时自动倒泵功能;9.具有第二压力(消防压力)设定和控制功能;10.具有缺水自动检测保护功能和外部输入停机保护功能;11.系统补水控制时,具有超压自动泄水控制功能;12.具有供水附属小泵控制功能,可设定小泵变频或工频模式;13.具有可选的定时自动开、关机控制功能;14.具有小流量水泵睡眠控制功能;15.具有手操器功能,可手动调节输出电压来控制变频器的频率;16.可代替电接点压力表进行上、下限压力控制;17.具有可选分时分压供水控制功能,最多有六段时间控制;三、安装和配线端子说明1.控制器外形尺寸: 160mm×80mm×80mm(AC-3200)160mm×80mm×90mm (AC-3200)2.控制柜面板开口尺寸152mm×76mm,面板卡入式安装。
3.使用环境为:无水滴、蒸汽、腐蚀、易燃、灰尘及金属微粒的场所;4.使用环境温度:-20℃~50℃5.相对湿度:<95%;6.额定工作电压:AC220V±10%;7.控制器额定功耗:<=AC 5W;8.控制器接线端子输出容量:3A/ AC220V9.面板及配线端子说明:VC-3200型控制器端子接线图VC-3200型控制器接线端子说明:N---AC 220V零线 L --- AC 220V火线B1---1#泵变频运行触点B2---2#泵变频运行触点B3---3#泵变频(或4#泵工频)运行触点 G1---1#泵工频运行触点G2---2#泵工频运行触点 G3---3#泵工频运行触点TXD/T+ ---RS232/485通讯接口NC ---空点RXD/T- ---RS232/485通讯接口GND—信号地CM1---信号公共点1 FWD---正转运行V+ ----远传压力表高端IN---压力信号输入端(0-5V)GND---压力信号公用端DI2---停机信号输入DI1---第二压力信号设定端D/A ---DC 0-10V输出CM2---信号公共点2四、操作面板指示及参数设定说明1.面板及按键:PV窗口为测量值显示窗口,SV窗口为设定值显示窗口。
ERV阀门调试说明

ERV阀门控制器调试说明一、ERV阀门控制器介绍1、ERV阀门的执行机构分为气动单缸、气动双缸和电动方式。
电动方式又分为单相220V AC、三相380 V AC。
2、气动执行机构一般配置MORIN,电动执行机构一般配置LIMITORQUE或AUMA。
3、尽管ERV阀门的执行机构不同,ERV阀门控制器的控制方式也有部分差异,但基本的控制原理是一样的。
4、系统压力经压力变送器数模转换后,ERV阀门控制器接收压力变送器送出的4~20mA电流信号,经控制器内部进行分析判断。
一旦电流信号与设置的开启电流信号一致,则控制器发出开启指令,ERV阀门打开。
在系统压力降低至回座压力时,一旦电流信号与设置的关闭电流信号一致,再发出关闭指令,ERV 阀门关闭。
4、1 气动方式:控制器发出指令至相应的接触器和电磁阀,电磁阀动作,开启对应的气源管路,执行机构动作执行相应的指令。
4、2 电动方式:控制器发出指令至相应的接触器,接触器动作,电机通电,执行机构动作执行相应的指令。
二、ERV阀门控制器的控制方式简要说明:目前ERV阀门控制器分为两种形式:3个按钮控制器和5个按钮控制器1、3个按钮控制器:3个按钮分别为P按钮、↑按钮和↓按钮1、1 调试方法:1、1、1 按P按钮,控制器先显示AL-1,再显示一个数据,该数据即为回座值(PSI)。
1、1、2 再按P按钮,控制器先显示AL-2,再显示一个数据,该数据即为起跳值(PSI)。
1、1、3 再按P按钮,控制器显示END。
并恢复至正常显示状态。
对于ERV阀门起跳压力和回座压力的数据,一般在出厂之前已根据用户(锅炉厂)的要求进行设定,并把程序进行锁定,防止意外更改。
1、2 更改方法:现场可以对起跳压力和回座压力的数据进行更改,但其他任何数据切记不要更改。
1、2、1 按P按钮,控制器先显示AL-1,再显示一个数据,该数据即为回座值(PSI)。
按↑按钮,回座值升高,按↓按钮,回座值降低。
长沙地铁2号线ERV空气制动系统

方式 , 对 制 动 系统 的功 能 进 行 了说 明 。
[ 关键词 ] 地铁车辆
0 、 引 言 长沙 轨道交通 2 号线采用 的是车控 的 E R V制动系统 , 该系统首 次 在 国内地铁项 目中批 量使用。本文主要对该制动 系统 的核心控制部件 和原理进行介绍 。 1 、 制动系统气路原理
戢* ● I
t 度 }
* 皂 ●
图1 气 路 原 路 图 长沙地铁 2 号线 E RV车控制动系统气路原理如 图 1 所示 , 每节车装 配 一个制动控 制模块 , 它主要包括 一个主 风缸 MR, 一个制动 风缸 B R,
个悬挂 风缸 S R 和制动控制单元 B C U 。 主风缸 MR储存用于制 动系统及其它用 风装置 的压缩 空气 。主风 缸 的风经 过塞 门 B V1 、 过滤器 F V分 成三路 : 路经单 向阀 C V 1 到制 动风缸 , 为制动控制单 元供风 。制动风缸 通过 截断塞 门向制动控制单元 B C U供风 , 制 动控制单元 根据悬挂系统 反馈 的载荷压力及速度传感器反馈 的速度信号对 踏面制动单元进行气 压控 制 。制动 控制单元 内集成压力传感 器和压力 开关 , 用于 监测空气 制动和停放制 动状态。 路经过停放 脉 冲阀E V给停放制 动缸供风 。停放制动 的施加 和 缓 解是通 过停 放脉 冲阀来进 行控制 的 。该 脉冲 阀通过 车辆 电路来操 作, 且 在电路 失效 时也可通过阀上的手动按钮进行控制。 还 有一路经溢 流阀 O V, 单向 阀C V 2 、 辅 助风缸 S R、 减压 阀R V和 塞 门B V 2 给空气悬挂系统供风。 截 断塞门用于切除整节车或单个转向架的空气制动。 每根轴配置一个 防滑 阀, 由制动控 制单 元进行控制 , 对输 出到踏 面 制 动单元 的压力进行修正 , 减小滑行时的制动缸压力 。 每根轴配备两个踏面制动单元 , 其 中一 个带停放制动功能 , 是空气 制 动和停 放制动的执行部件。 2、 制动 系统配置 长沙地 铁 2号线采 用 由两个列 车单元 ( T c — Mp —M) 组成 的 4 动2 拖 六辆编组 列车 。每节车 配置一个制 动控制单元 ( B C U) , 负责本节 车 的空气 制动控制 , 如下图 2 所示
埃夫特智能 ER180-4-3200 工业机器人快速使用手册说明书

2.3.3 机器人控制柜搬运 ..................................................... 16 2.4 安装 .......................................................................... 17
4.3.1 什么是点动操作 ....................................................... 50 4.3.2 点动操作注意事项 ..................................................... 50 4.3.3 开始点动操作 ......................................................... 50 4.3.4 关节坐标系-点动操作 .................................................. 51 4.4 程序操作 ...................................................................... 52 4.4.1 什么是程序操作 ....................................................... 52 4.4.2 程序操作注意事项 ..................................................... 52 4.4.3 开始程序操作 ......................................................... 52 4.5 停机断电 ...................................................................... 54 第 5 章 安装过程中常见故障与排查方法 ............................................ 55
智能空调控制器产品参数对比表说明书
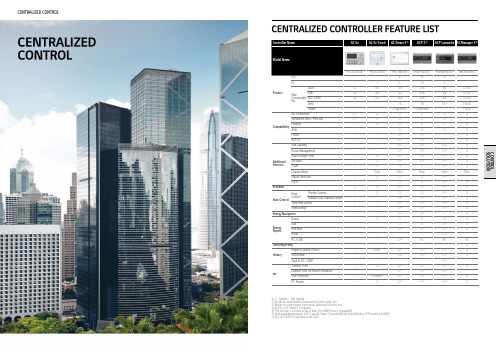
CENTRALIZED CONTROLLER FEATURE LIST※ ○ : Applied, - : Not Applied1) Except for some feature (individual lock, limit, temp., etc.)2) Except for some feature (user mode, additional function, etc)3) ACP 5 or AC Smart 5 is required4) This function is possible to use in Web Only (BMS Point is not applied)5) Without additional device, ACP 5 and AC Smart 5 provide BACnet IP and Modbus TCP interface for BMS 6) ACS, ACP , ACM 5 Expected to 4Q, 2020CENTRALIZED CONTROL※ ○ : Applied, - : Not Applied1) It is only available in some products※ ○ : Applied, - : Not AppliedSmart management with 5 inch touch screen for small site.Features & Benefits• U ser friendly control by graphical access • T otal 200 schedule events • E nergy saving mode • E nergy monitoring (with PDI)• 2 set point function (Upper / Lower temperature setting)•T emperature set points range limit •R emote controller lock (All, Temp, Mode, Fan Speed)•O peration history •Filter cleansing or changing alarm •E mergency stop Features & Benefits• 32 indoor units control • W eekly Schedule • I ndividual / Group ControlPACEZA000AC EZ TOUCHOverviewPCInternetIDUIDUERVPC AccessUsers can control each space efficiently through PC access.Energy Statistics (with PDI)Statistics of operational status (time, power consumption) are provided to help make intelligent system operation decisions.FeatureInternet* IPv6 supportedEnergy ModeWhen using energy mode function, operation mode changes from cooling to fan or heating to off mode by force.(It is available only for operating indoor unit)ScheduleSchedule control allows user to set the events in advance to maximize system performance. Also, by blocking unnecessary operation, it prevents a waste of energy.Alarm IndicatorIt shows errors and alarm information. Users can respond immediately according to alarm indicator therefore HVAC system is monitored consistently.Group / Individual ControlBy clicking each indoor units on screen, user controls them individually or by group. It is useful to monitor or control for the best fit of request.Easy to manage up to 32 indoor units, including ERV with simple interface.PQCSZ250S0AC EZAppropriate PI 485 should beused according to PDB• MULTI V 5• MULTI V IV • MULTI V III • MULTI V II • MULTI V S• MULTI V WATER IV • MULTI V WATER II• ERV• MULTI SPLIT • SINGLE SPLITLarge 10 inch type touch screen with HTML5 GUI(Graphic User Interface) fitted with a screen resolution allows easy control.Features & Benefits• T he central controller allows control of the LG HVAC system to various platforms.(Touch screen, PC, Smartphone, Tablet)-DI : 2 / DO : 2-Max. 128 IDU control -BACnet IP/Modbus TCP -Schedule-Map view (Visual navigation)-Time limit control / Auto change over -Energy monitoring-History / Operation trend-I nterlock with 3rd party equipment (ACS IO, ACU IO Module is needed)-Multi level grouping-Emergency stop & alarm -Error alarm by e-mailPACS5A000AC SMART 5※ ○ : Applied, - : Not Applied1) Chiller Option Kit (PCHLLN000) is required 2) It is only available in some products3) For the detail point list, please refer to the installation manualBACnet over IPBMSAC Smart 5Without additional device, AC Smart 5 provides BACnet IP / Modbus TCPinterface for BMS (Building Management System) integration as well as its own management function.AC Smart 5 reflects the state of the art of network technology trend. IPv6 (Internet Protocol version 6), which is the most recent version of the Internet Protocol, provides accessibility to the IPv6 compatible network environment. In addition, HTML5 allows you to easily control LG HVAC system on a variety of platforms (PC, Mobile, Tablet), at any time and from any location, not just on the touch screen.BMS IntegrationEnergy navigation function allows air conditioners operation to be managed under the monthly (Weekly / Yearly) plan of energy usage. By analyzingpresent energy consumption and comparing with the plan, overuse of system operational costs can be prevented.Energy Management / Operation TrendYou can freely apply layer structure such as building, floor , zone, etc. and set the group as the same as the site composition to control and monitor the devices. If you have special control group, you can additionally compose frequently used groups such as VIP Room, executive room, etc. regardless of the building structure.Multi Level Group CompositionAdvanced Network AccessibilityVisual navigation enables controlling and monitoring the unit on floor plan view for the intuitive management.Visualized ControlAC Smart 5 can make operation scenario with 3rd party equipment by ACS IO Module. Control coverage is expanded. (Air conditioner only → Sensors, Fans, Pumps, Switches…)Interlocking with 3rd party equipmentIDUsHydro Kit AC Smart 5...ACS IO※ ○ : Applied, - : Not Applied1) Chiller Option Kit (PCHLLN000) is required 2) It is only available in some products3) For the detail point list, please refer to the installation manual※ ○ : Applied, - : Not AppliedAdvanced solution for BMS integration up to 256 units via BACnet and Modbus protocol as well as its own smart management function with web server interface.LonWorks easily link LG air conditioners and other existing building systems. By including ACP control function, the controlling continues even when error occurs with BMS.Features & Benefits•The central controller allows control of the LG HVAC system by various platforms. (PC, Smartphone, Tablet)-DI :10 / DO : 4-Max. 256 IDU control -BACnet IP/Modbus TCP -Schedule-Map view (Visual navigation)-Time limit control / Auto change over -Energy monitoring-History / Operation trend - I nterlock with 3rd party equipment (ACS IO, ACU IO Module is needed)-Multi level grouping-Emergency stop & alarm -Error alarm by e-mailFeatures & Benefits• C onnect to use Lonworks Ⓡprotocol and LG air conditioner protocol.• P rocess ability (Max. connection) : Indoor unit 64EA, AHU Control Kit : Max. 16EA • S elf installation verification using internet(Web Server Included) - Diagnosis of communication status on LG Air-conditioner network • I t offers a variety of functions as ACP which allows the customer to efficiently control various types of equipment from the customer’s own Integration.PACP5A000PLNWKB000ACP 5ACP LONWORKS GATEWAYOverviewAdvanced Network Accessibility Energy Navigation BACnet IP / Modbus TCPSpecial control groupBACnet over IPBMS1) Assignment of public IP address is required to access central controller through internet. Appropriate PI 485 should be used according to PDB (Product Data Book)InternetAC Smart 5* Slave* MasterBackup operation• AHU (Control Kit)• MULTI V 5• MULTI V IV • MULTI V III • MULTI V II • MULTI V S• MULTI V WATER IV • MULTI V WATER II• ERV • MULTI SPLIT • SINGLE SPLITBMS system•Power : C onnected with theIndoor Units•1 for Each Indoor Unit- Indoor Unit (ERV)PI 485 converts LG air conditioner’s protocol to the RS485 protocol for the central controllerPHNFP14A0PI 485party interlocking ACS IO※ ○ : Applied, - : Not Applied1) Chiller Option Kit (PCHLLN000) is requiredNote : AC Manager 5 requires ACP 5 or AC Smart 5Multiple ACP and AC Smart integration solution to manage multi sites up to 8,192 units as a single system.Features & Benefits•Consol Type : No needs software installation and lock-key •Max 8,192 IDU Control •Schedule•Map View (Visual Navigation)•Time limit control / Auto change over •Energy Monitoring / Navigation •History / Operation Trend •Emergency stop & alarm •Error alarm by E-mail •Multi Language(Eng, Ita, Spa, Por, Rus, Fra, Ger, Tur, Pol, Chi, Kor)PACM5A000AC MANAGER 5OverviewPCMobileTabletInternet3rd party DeviceACS IO ModulePeak ControlThis function can reduce electricity use. There are two kinds of control logic. Energy saving effect by indoor unit operation rate control. Load management effect by outdoor unit capacity control.Multi Level Group CompositionYou can freely apply layer structure such as building, floor , zone, etc. and set the group as the same as the site composition tocontrol and monitor the devices. Special control group You can additionally compose frequently used groups such as VIP Room, executive room, etc. regardless of the building structure.Energy Navigation & Energy Usage TrendEnergy navigation is the function to set the target usage amount to limit the monthly power consumption and to control so that the total accumulated power consumption does not exceed the target usage amount. It performs total of 7 control levels with the estimated/actual usage amount exceeding ratio compared to the monthly target usage amount. For the control method, there are indoor unit operation ratio, outdoor unit capacity control, and indoor unit operation control.Integrated with S/W program and Hardware platform, it is convenient to install since users no longer need to install program with lock-key on PC.Stand-aloneUp to 8,192 Connections for Indoor UnitsAdministrators can easily and conveniently manage a variety of LG HVAC equipment. Also, it is available to manage many buildings or areas at one place via AC Manager 5.Compressor CapacityControl Operation ratio (IDUs) Control ODU Capacity ControlIDU operation Ratio Control IDU operationlevelAdvanced Network Accessibility & User Friendly GUI (reddot award)As an advanced central controller , AC Manager 5 offers flexible interface for each user by assessing the device screen and automatically customizing the layout to provide the most optimized interface.Indoor unit Priority Control9 Step Operation rate (%)[ 0, 40, 45, 50, 60, 70, 80, 90, 100 ]gradually stop depending on importance of room.Robby Office VIP room Compressor Hz ControlMax. IDU 256 EAMax. IDU 128 EAMax. IDU 256 EAControl towerAC Manager 5AC Manager 5ACP 5ACP 5AC Smart 5AC Smart 5ACP 5Chiller & AHUODU / IDU & ERVChiller Option kitAHU ControllerAHU Comm.kit。
VT CVT系列真空计和控制器使用说明书

VT/CVT SERIES VACUUM GAUGESand CONTROLLERSTELEDYNE HASTINGSINSTRUMENTSC E R T I F I E DManual Print HistoryThe print history shown below lists the printing dates of all revisions and addenda created for this manual. The revision level letter increases alphabetically as the manual undergoes subsequent updates. Addenda, which are released between revisions, contain important change information that the user should incorporate immediately into the manual. Addenda are numbered sequentially. When a new revision is created, all addenda associated with the previous revision of the manual are incorporated into the new revision of the manual. Each new revision includes a revised copy of this print history page.Revision A (Document Number 146-0497) ....................................................................... April 1997 Revision B (Document Number 146-0999) ............................................................... S eptember 1999 Revision C (Document Number 146-0301) ..................................................................... M arch 2001 Revision D (Document Number 146-0902) ............................................................... S eptember 2002 Revision E (Document Number 146-0805) .................................................................... August 2005 Revision F (Document Number 146-0710).......................................................................... J uly 2010 Revision F (Document Number 146-1111)................................................................ November 2011Visit for WEEE disposal guidance.Hastings Instruments reserves the right to change or modify the design of its equipmentwithout any obligation to provide notification of change or intent to change.The instruments described in this manual are designed for Class 2 installations in accordance with IAW/IPC standardsCAUTION:CAUTION:The instruments described in this manual are designed for INDOOR use only.The instruments described in this manual are available with multiple pin-outs. Ensure that all electrical connections are correct.CAUTION:Table of Contents1.1.F EATURES (4)1.2.S PECIFICATIONS (4)1.3.S AFETY (4)1.4.A CCESSORIES (5)1.5.DV-6S:N EW DV-6 TUBE F OR S EVERE E NVIRONMENTS (5)1.6.C ALIBRATION R EFERENCE T UBES (5)2.0INSTALLATION (6)2.1.P ANEL M OUNT V ACUUM G AUGE AND C ONTROLLER (6)2.2.C ABINET M OUNT V ACUUM G AUGE (7)2.3.E XTERNAL C ABLES AND W IRING (7)2.4.V ACUUM G AUGE T UBE (9)3.0VACUUM GAUGE OPERATION (10)3.1.M ETER M ECHANICAL Z ERO (10)3.2.AC I NPUT P OWER (10)3.3.P RESSURE M EASUREMENT (10)3.4.C ONTROLLER S ET P OINTS (CVT UNITS ONLY) (10)3.5.O PERATION AND P ERFORMANCE C HECK (10)3.6.G AUGE T UBE O PERATION (11)3.7.A NALOG P RESSURE M EASUREMENT (11)3.8.C ALIBRATION (13)3.8.1.C ALIBRATION U SING A V ACUUM S YSTEM (13)3.8.2.C ALIBRATION U SING A H ASTINGS R EFERENCE T UBE (13)4.0WARRANTY (14)4.1.W ARRANTY R EPAIR P OLICY (14)4.2.N ON-W ARRANTY R EPAIR P OLICY (14)This manual contains technical and general information relating to the installation, operation, and calibration of Hastings Vacuum Gauges, Controllers, and Gauge Tubes. For best performance, Hastings vacuum gauges should be operated with the appropriate Hastings gauge tube. Attempting to use a Hastings vacuum gauge with other manufacturer’s tubes may result in damage to both the gauge and tube.1.1. FeaturesHastings vacuum gauges and controllers are self-contained instruments that offer extreme versatility for most vacuum applications. The electronic design assures long life and minimal maintenance. Compact VT & CVT Models are ready for mounting onto a panel.Hastings vacuum gauges and controllers utilize Hastings rugged but sensitive gauge tubes which are designed specifically for each of the three available pressure ranges (consult Hastings Ordering and Dimension guide).1.2. SpecificationsPressure range:VT-4 series, CVT-14/24,................................................................................ 0-20 Torr or 0-20 mbar VT-5, CVT-15/25, ................................................................................. 0-100 mTorr or 0-0.1 mbar VT-6series, CVT-16/26, ......................................................................... 0-1000 mTorr or 0-1 mbar Input power ............................................................................................. 115 or 230 VAC, 50/60 Hz Output signal ....................................................................................... 0-1 VDC (analog, non-linear) Optional VT series Standard CVT seriesControl relays ..................................................................................... 5A @ 250 VAC (resistive load)5A @ 30 VDC (resistive load)Cables ..................................................................................................................... 6 ft (1.8 m) power8 ft (2.4 m) gauge tubeWeight:Panel mount meters ..................................................................................... 1.78 lb (0.81 kg) w/cables Panels mount controller’s ............................................................................. 2.13 lb (0.97 kg) w/cables Cabinet models .............................................................................................. 4.25 lb (2.0 kg) w/cables1.3. SafetyThe following symbols and terms may be found on THI products and/or in THI manuals and indicateimportant information.When found on the device, this symbol indicates that the operator should refer to the manual for important instructions on the proper use of this device. When found in a manual, this symbol indicates that the reader should understand the implications contained in the text before operating the device.The WARNING label indicates important information that should be heeded for safe and proper performance of the device.1.0The label, CAUTION, is used to indicate that damage to the power supply or equipment connected to it, could occur if directions are not followed. Warranty could be invalidated if the instructions in this manual are not followed.1.4. AccessoriesTHI offers a complete line of system attachments that permit easy maintenance for contaminated operations.Gauge tubes are offered with various system fittings tomatch almost any system requirement. Additionally, THI’s complete line of quick disconnect attachments allows customers to install these special fittings and easily replacesensors without vacuum sealant or Teflon® tape. For particularly dirty systems, Hastings offers a particle dropout trap containing a series of nine separate baffles which prevent solid contaminants from having a direct path tothe sensor’s thermopile.1.5. DV-6S: New DV-6 tube ForSevere EnvironmentsHastings Instruments has developed a new gauge tube, the DV-6S, which is specifically designed for outdoor use on cryogenic tanks including railcar and tanker truckapplications. In addition to the DAVC, the gauge tube is compatible with the hand-held HPM-4/6 and the analog VT-6. The DV-6S is supplied with a protective cap. The o-ring-sealed cap protects the gauge tube pins from moisture thussignificantly reducing corrosion. A metal lanyard prevents cap loss. The tube isprovided with a standard 1/8” NPT fitting; however special fitting requests can often be met.1.6. Calibration Reference TubesTHI Reference Tubes employ the samemetal thermopiles used in all THI Vacuum Gauge Tubes. The thermopile is sealed in a glass capsule that has been evacuated, baked, out-gassed, and then aged to ensure long-term stability. The sealed capsule is then housed in a protective metal shell to provide a rugged, trouble-free assembly.Once assembled, the reference gauge tube is accurately calibrated to precisely simulate a gauge tube at agiven operating pressure. It provides quick and easy instrument re-calibration by merely plugging the instrument and adjusting the calibration potentiometer until the display reads the exact pressure noted on the reference tube.Extension Cables for VT Series55-3 OM-8-OFV 8 Ft Extension Cable 55-22 OM-12-OFV 12 Ft Extension Cable65-53 OM-25-OFV 25 Ft Extension Cable 65-102 OM-50-OFV 50 Ft Extension Cable 55-142 OM-100-OFV 100 Ft Extension CableVacuum Gauge Tubes 1000 mTorr Range Stock # Model # Description 55-38 DV-6M 1/8” NPT Standard (Yellow base)55-38R DV-6R 1/8” Ruggedized 55-38RSDV-61/8” NPT Rohs Rugged55-38S DV-6S 1/8” NPT Rugged/Vibration 55-251 DV-6-KF-16 KF-16TM 55-267 DV-6-KF-25 KF-25TM55-283 DV-6-VCR VCR TM55-38R-CF DV-6R-CF Mini Conflat TMVacuum Gauge Tubes 100 mTorr Range55-19 DV-5M 1/8” NPT (Red Base) 55-230DV-5M -VCRVCR TMVacuum Gauge Tubes 20Torr Range55-19DV-4D1/8” NPT (Purple Base)55-19R DV-4R 1/8” NPT Ruggedized 55-258 DV-4D-KF-16 KF-16TM 55-266 DV-4D-KF-25 KF-25TM55-227 DV-4D-VCR VCR TMReference Tubes for use with VT/CVT55-104 DB-20 Ref Tube (DV-6) for DV-6 Calibration 55-101 DB-16D Ref Tube (DV-4D) for DV-4 Calibration 55-103DB-18Ref Tube (DV-5) for DV-5 Calibration2.02.2. Cabinet Mount Vacuum GaugeHastings cabinet models can be obtained with 2 - position or 5 - position tube switching functions that will allow the user to display pressure from one or more selected tubes. No special installation is necessary; simply connect the power cord and the gauge tube cables.Note: All of the gauge tube cables on either a 2-position or a 5-position unit must be equal in length. Mixing cable lengths on a particular unit will produce a calibration error due to the different resistances of the cables.2.3. External Cables and WiringWARNING: To prevent shock hazard to personnel, always install protective cover before application of AC power or prior to placing instrument in-service.VT series unitsConnect the AC power cable, gauge tube cable, and analog output (analog output is only available on units configured from the factory with 0-1 VDC) as detailed in figure 2-4. The terminal block protective cover must be removed to access screw terminals. Terminal FunctionDescription3 Gauge tube cable Heated T.C. (blk wire)4 AC power cable 115 VAC (blk wire) 5 Gauge tube cable Heated T.C. (wht wire)6 Gauge tube cable Compensated T.C. (green wire)7 Analog output (1vdc) Negative analog output terminal8 Analog output (1vdc) Positive analog output terminal9 AC power cable Lo VAC (wht wire) 10 AC power cable 230 VAC (blk wire) 13 COM chassis ground 14 COM AC power ground (green/yellow wire)WARNING:When 115 VAC is connected to the auto transformer, 230 VAC appears at the 230 VAC terminal. The same occurs when you attach 230 VAC to the unit, 115 VAC appearsat the 115 VAC terminal.CVT series unitsConnect the AC power cable, gauge tube cable, control relay and analog output (analog output is optional on VT and standard on CVT) as detailed in figure 2-5. The terminal block protective cover must be removed to access screw terminals.Fig 2.4VT Series Terminal BlockTERMINAL FUNCTION DESCRIPTION1Lo set relay (Normally Closed) relay contact 2 Lo set relay (Normally Open) relay contact 3 Gauge tube cable Heated T.C. (blk wire) 4 AC power cable 115 VAC (blk wire) 5 Gauge tube cable Heated T.C. (wht wire) 6 Gauge tube cable Compensated T.C. (green wire) 7 Analog output (1vdc) negative analog output terminal 8 Analog output (1vdc) positive analog output terminal 9 AC power cable Lo VAC (wht WIRE) 10 AC power cable 230 VAC (blk WIRE) 11 Spare no connection 12 Lo set relay (COM) relay contact 13 COM chassis ground 14 COM AC power ground (green/yellow wire) 15 Hi set relay (Normally Closed) relay contact 16 Hi set relay (Normally Open) relay contact 17Hi set relay (COM) relay contactWARNING:When 115 VAC is connected to the auto transformer, 230 VAC appears at the 230 VAC terminal. The same occurs when you attach 230 VAC to the unit, 115VAC appears at the 115 VAC terminal.Fig 2.5 CVT Series Terminal Block2.4.Vacuum Gauge TubeAll Hastings gauge tubes are shipped with a protective cap or cover at the evacuation port to reduce contamination and prevent physical damage to the internal thermopile elements. Once the protective cap or cover is removed, a tube can be installed in any convenient position in the vacuum system without adversely affecting calibration or performance. The recommended orientation is with the tube vertical and its stem down. This will aide in preventing condensable materials from remaining in the gauge tube.Hastings instruments also offer a wide variety of installation accessories for use with your vacuum gauge tube. Please consult the Hastings Ordering and Dimension Guide or contact your factory representative for information on these products.WARNING: Compression seal fittings “Quick-Connects” are not for use insystems where the tube can be pressurized above atmosphere.3.1. Meter Mechanical ZeroWith the gauge in its normal operating position (AC power removed), check that the meter pointer covers the Dot at right-end of the dial face. If the Dot is not covered by the pointer, adjust screw at the front of the meter until the pointer covers the Dot.3.2. AC Input PowerConnect the plug end of power cable into a single phase 115 or 230 V, 50/60 Hz power source (as per unit configuration). When replacing the power cords standard plug with a plug to match a particular system, care should be taken to connect the new plug in accordance with the terminal block connections listed in section 2.4 of this manual.3.3. Pressure MeasurementConnect gauge tube cables octal socket onto the octal base of a gauge tube installed in vacuum system. The gauge will display the system pressure on the meter dial face. To check the accuracy of the gauge, perform the required operations as specified in section 3.5 of this manual.3.4. Controller Set Points (CVT units only)The CVT series vacuum controllers are provided with either single or double set points. On a single set point controller, the right-front panel knob allows the user to adjust or position the “RED” pointer on the dial face where a desired control function will occur.On the double set point controller, the left-front panel knob is added to allow the user to adjust or position a second “RED” pointer on the dial face where a desired control function will occur.On those controllers configured with two front panel knobs; the left knob controls the LO Set pressure (Relay K1), and the right knob controls the HI Set pressure (Relay K2). Control logic determines that a relay will (energize) when the indicated pressure is lower than the set-pressure, and de-energize when the indicated pressure is higher than the set-pressure or if their is a loss of AC power to the unit.3.5. Operation and Performance CheckAll Hastings vacuum gauges, controllers, and tubes have been carefully calibrated and checked at the factory before shipment. When a operational check or calibration is desired, refer to the procedure outlined in this section.The simplest and quickest way of checking the operation and performance of a gauge and/or gauge tube is to maintain a new or known-good gauge tube on hand for use as a Reference. To check operation, install both the Reference and suspect gauge tubes in a common vacuum3.0 To avoid relay chatter, keep the lower set point above the ultimate system pressureCAUTION:system (locate the gauge tubes as close as possible to each other), then evacuate the system until a stable base pressure is obtained. Alternately connect the vacuum gauge to each gauge tube and record its pressure readings. If the gauge tube-under-test produces a higher pressure reading than the Reference gauge tube, this indicates a calibration shift and is usually the result of contamination (particulate, oil, or other chemical deposits). You can try to restorecalibration of the contaminated gauge tube by cleaning it internally with an appropriate solvent such as high-purity isopropyl alcohol (flood interior cavity of gauge tube gently with solvent and allow it to stand and soak for about 15 to 30-minutes). Drain the contaminated solvent and let gauge tube dry in ambient air until all of the cleaning solvent has evaporated. Toprevent mechanical damage to the thermopile elements, do not use forced air to dry the gauge tube. Gauge tubes that remain out of3.6. Gauge Tube OperationOperation of the Hastings gauge tube isin the gauge tube changes the molecularcollision rate and therefore the thermalconduction of the gas or gas mixturetemperature shift in the AC heatedthermocouples A and B (Fig. 3.1). Thethe DC output from couples A and B3.7. Analog Pressure MeasurementAn analog Signal Output line, pin 8, supplies a 0 to 1 VDC signal corresponding to the output range of the selected tube. This signal should be measured with respect to the analog Signal Common line, pin 7. See the INSTALLATION section for a diagram showing the Analog Signal pin out.This signal is equal to an amplified tube millivolt signal. This signal will NOT be linearly proportional to the indicated pressure. 1 volt will correspond to a system pressure that is at least 1 order of magnitude less than the minimum detectable pressure. Increasing pressure will be indicated by adecreasing voltage. The minimum detectable pressure is 0.2 millitorr for DV-5, 1 millitorr for DV-6 and 20 millitorr for DV-4.The voltage signal can be mapped to a pressure value by using the following equation.Where:V = VoltageP = pressure in Torr for DV4 & DV5 versions and millitorr for DV6 See Chart below221dV bV eV cV a P ++++=Parameters DV6DV4DV5a -1623.22-5.10184-0.25948b -58.0442-6.91233-42.23869c -11732.2-4.4943-2.92598d -130.397-6.30995-256.9951e 13338.179.563177 3.180163.8.CalibrationUsing a vacuum system to calibrate a gauge or gauge/tube combination will result in a more accurate pressure measurement. For instances where this is not possible, calibrating the gauge using a Hastings reference tube provides the best alternative.NOTE: For cabinet models, the top-cover must be removed to access the CAL control.3.8.1.Calibration Using A Vacuum SystemInstall the gauge tube in a vacuum system (gauge connected to AC power and stabilized), then evacuate to a pressure one decade or more below the gauge dial face resolution. Connect the gauge to tube and wait until the displayed pressure is stable.NOTE: When using a DV-4 type gauge tube, system pressure must be less than 1.0 x10-2 Torr.When using DV-5 or DV-6 type gauge tubes, system pressure must be less than 1.0 x 10-5 Torr.Adjust the gauge CAL. adjustment (figure 3.2) until the meter pointer indicates zero-left on the dial face.3.8.2.Calibration Using A Hastings Reference TubeConnect a Hastings reference tube to a stabilized vacuum gauge. Wait until the displayed pressure is stable.NOTE: The following table specifies the Hastings reference tube to be used in the calibration of a gauge based upon the type of gauge tube being used:Reference tube Gauge tubeDB-16D DV-4DB-18 DV-5DB-20 DV-6Adjust the gauge CAL control (figure 3.2) until the meter pointer indicates the pressure specified on the decal of the reference tube in use.Fig 3.2calibration points4.04.1.Warranty Repair PolicyHastings Instruments warrants this product for a period of one year from the date of shipment to be free from defects in material and workmanship. This warranty does not apply to defects or failures resulting from unauthorized modification, misuse or mishandling of theproduct. This warranty does not apply to batteries or other expendable parts, nor to damagecaused by leaking batteries or any similar occurrence. This warranty does not apply to anyinstrument which has had a tamper seal removed or broken.This warranty is in lieu of all other warranties, expressed or implied, including any implied warranty as to fitness for a particular use. Hastings Instruments shall not be liable for anyindirect or consequential damages.Hastings Instruments, will, at its option, repair, replace or refund the selling price of the product if Hastings Instruments determines, in good faith, that it is defective in materials orworkmanship during the warranty period. Defective instruments should be returned toHastings Instruments, shipment prepaid, together with a written statement of the problemand a Return Material Authorization (RMA) number. Please consult the factory for your RMAnumber before returning any product for repair. Collect freight will not be accepted.4.2.Non-Warranty Repair PolicyAny product returned for a non-warranty repair must be accompanied by a purchase order, RMA form and a written description of the problem with the instrument. If the repair cost ishigher, you will be contacted for authorization before we proceed with any repairs. If you thenchoose not to have the product repaired, a minimum will be charged to cover the processingand inspection. Please consult the factory for your RMA number before returning any productrepair.TELEDYNE HASTINGS INSTRUMENTSAVENUENEWCOMBE804HAMPTON, VIRGINIA 23669 U.S.A.ATTENTION: REPAIR DEPARTMENT723-6531TELEPHONE (757)1-800-950-2468FAX (757)723-3925MAIL mailto:*********************************EINTERNET ADDRESS Repair Forms may be obtained from the “Information Request” section of the Hastings Instruments。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电磁泄放阀(ERV)控制箱使用、操作说明书
1、阀门及控制系统工作方式
当过热器出口处的蒸汽压力超过正常工作压力,达到预先设定的开启压力时,控制箱将发出指令通过执行机构打开ERV主阀泄放蒸汽,当蒸汽压力降低到预先设定的关闭压力(一般为开启压力的98%)时,控制箱将发出指令通过执行机构关闭ERV主阀。
1)在就地控制箱上将手动(MANUAL)/自动(AUTO)切换开关置于手动(MANUAL)时:通过控制箱面板上的开关按钮来手动开启(OPEN)/关闭(CLOSE)阀门,或通过布置在控制室里的远手操控制面板来手动开启(OPEN)/关闭(CLOSE)阀门;
2)在手动(MANUAL)/自动(AUTO)切换开关置于自动(AUTO)时:当系统压力在正常工作压力范围内时,可通过DCS远程信号来开启(DCS OPEN)/关闭(DCS CLOSE)阀门。
注:DCS远程信号为无源脉冲信号, 脉冲大于1秒。
3)在手动(MANUAL)/自动(AUTO)切换开关置于自动(AUTO)时:系统会根据“RED LION”予先设置的参数,当压力传感器到达开启压力(SP2)时,阀门自动打开;当压力低于关闭压力(SP1)时,阀门自动关闭。
2.控制系统类型
ERV控制系统有三种:
1)与配电动执行机构的电磁泄放阀配套,电动执行机构电源为380V AC/50Hz/3Ph;
控制箱控制电源为220V AC/50Hz/1Ph.。
用户只需提供电源:380V AC/50Hz/3Ph 即可,三线五线制
2)与配气动执行机构的电磁泄放阀配套,控制箱控制电源为220V AC/50Hz/1Ph.
用户提供电源:220V AC/50Hz。
3)与配气动执行机构的电磁泄放阀配套,控制箱控制电源为220VDC或110VDC
用户提供电源:220VDC或110VDC。
4) 远手操控制面板(可选项)
3. 压力传感器
测压范围:0-250bar, 0-400bar或其他
工作温度:-20℃~80℃(介质温度最高610℃)
信号输出:两线制 4-20mA输出,24VDC电源由控制箱提供。
4.显示
1)控制箱灯显
POWER、MANUAL、AUTO、OPEN、CLOSE
2)远手操控制面板灯显
MANUAL、AUTO、OPEN、CLOSE
3) RED LION仪表
仪表显示值设置为传感器满量程的百分比
传感器输出为4 mA 时,仪表显示值为0
传感器输出为20mA时,仪表显示值为100
(用户可根据情况更改显示设置)
5. RED LION仪表设置
参照RED LION说明书进行设置
6.接线
电动:
1) POWER:380V AC/50Hz,三线五线制
2) MOTOR、LIMIT SWITCH &TORQUE SWITCH
3) TRANSDUCER
注意:接线时( +, - )切勿接反,调试时若用信号源模拟传感器4-20mA输出信号,信号源应为无源信号,否则RED LION仪表会烧毁。
4) DCS OPEN,DCS CLOSE(DCS输入,无源脉冲)
5) CHOICE MANUAL、FULL OPEN、FULL CLOSE(无源输出,有动作时触点闭合)
气动:
1) POWER:220V AC或220VDC或110VDC
2) LIMIT SWITCH
3) TRANSDUCER
注意:接线时( +, - )切勿接反,调试时若用信号源模拟传感器4-20mA输出信号,信号源应为无源信号,否则RED LION仪表会烧毁。
4) DCS OPEN,DCS CLOSE(DCS输入,无源脉冲)
5) CHOICE MANUAL、FULL OPEN、FULL CLOSE(无源输出,有动作时触点闭合)
远手操控制面板(可选项):
按图纸要求接线。