飞思卡尔电机驱动原理图
飞思卡尔智能车大赛技术报告
第九届“飞思卡尔”杯全国大学生智能车竞赛光电组技术报告学校:中北大学伍名称:ARES赛队员:贺彦兴王志强雷鸿队教师:闫晓燕甄国涌关于技术报告和研究论文使用授权的说明书本人完全了解第八届“飞思卡尔”杯全国大学生智能汽车竞赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:带队教师签名:日期:2014-09-15日摘要本文介绍了第九届“飞思卡尔杯全国大学生智能车大赛光电组中北大学参赛队伍整个系统核心采用飞思卡尔单片机MC9S12XS128MAA ,利用TSL1401线性CCD 对赛道的行扫描采集信息来引导智能小车的前进方向。
机械系统设计包括前轮定位、方向转角调整,重心设计器件布局设计等。
硬件系统设计包括线性CCD传感器安装调整,电机驱动电路,电源管理等模块的设计。
软件上以经典的PID算法为主,辅以小规Bang-Bang算法来控制智能车的转向和速度。
在智能车系统设计开发过程中使用Altium Designer设计制作pcb电路板,CodeWarriorIDE作为软件开发平台,Nokia5110屏用来显示各实时参数信息并利用蓝牙通信模块和串口模块辅助调试。
关键字:智能车摄像头控制器算法。
目录1绪论 (1)1.1 竞赛背景 (1)1.2国内外智能车辆发展状况 (1)1.3 智能车大赛简介 (2)1.4 第九届比赛规则简介 (2)2智能车系统设计总述 (2)2.1机械系统概述 (3)2.2硬件系统概述 (5)2.3软件系统概述 (6)3智能车机械系统设计 (7)3.1智能车的整体结构 (7)3.2前轮定位 (7)3.3智能车后轮减速齿轮机构调整 (8)3.4传感器的安装 (8)4智能车硬件系统设计 (8)4.1XS128芯片介绍 (8)4.2传感器板设计 (8)4.2.1电磁传感器方案选择 (8)4.2.2电源管理模 (9)4.2.3电机驱动模块 (10)4.2.4编码器 (11)5智能车软件系统设 (11)5.1程序概述 (11)5.2采集传感器信息及处理 (11)5.3计算赛道信息 (13)5.4转向控制策略 (17)5.5速度控制策略 (19)6总结 (19)6.1效果 (20)6.2遇到的问题以及解决办法 (20)6.3队员之间的合作很重要 (21)附录 (22)源程序 (23)1绪论1.1 竞赛背景随着经济发展,道路交通面临新的问题和新的挑战。
飞思卡尔智能车电源设计
E Ud 1
直流升压斩波电路(Boost Chopping)
• 电路两种工作状态。 状态一 在开关管T导通时, 电流经电感L、T流通, iL 上升, 电感储能。 负载R由电容C提供电流,二极管的作用是阻断电 容经开关管T放电的回路。 状态二 在T关断时,二极管D导通,电容C在电 源E和电感反电动势的共同作用下充电,电感释放 储能,电流iL从I02下降,iL同时提供电容的充电 电流和负载电流iR。如果电容足够大,电容两端 电压ud波动不大,负载R的电流是连续的。
的。
直流升降压斩波电路
直流升降压斩波电路
Ud E 1
• 当0≤α≤0.5时,Ud<E, • 在0.5≤α<1时,Ud>E, • 因此调节占空比α,电路既可以 降压也可以升压。
TPS73XX系列开关稳压芯片 的电源设计
• 美国TI公司微功耗、低压差电源管理 芯片, • 有2.5、3、3.3、4.85、5V几种固定电 压输出和一种可调电压输出, • 输出电流限制在1A左右,TPS7350在 100mA时只有35mV压差。
芯片规格
• • • • • • TPS7325 TPS7303 TPS7333 TPS7348 TPS7350 TPS7301 输出电压2.5V 输出电压3.0V 输出电压3.3V 输出电压4.85V 输出电压5V 输出电压1.2~9.75V
使用注意事项:
• 由于热损失小,基本上可以不考虑散热器。 • 芯片SENSE端直接连接输出端Vo,并且接 线尽可能短,以减小噪声,不推荐在SENSE 端和输出端Vo之间接RC滤波器。 • TPS7350通常不需要输入滤波电容,如果电 源离TPS7350有几英寸,使用陶瓷旁路电容 可以改善动态响应和有利降低噪声。为了保持 输出电压稳定性,一般在输出端接10μF旦电 容即可。 • TPS7350集成了电源复位电路,将RESET引 脚接至HCS12DG128B的复位引脚,可以代 替通常使用的MC34064复位芯片。
第八届飞思卡尔智能车电磁组技术报告华德思源队
飞思卡尔电磁组

智能车简介
飞思卡尔智能车大赛分三种赛组:
摄像头组
光电组
电磁组
调试视频
调试视频
电磁组原理概述
车模直立行走比赛是要求仿照两轮自平衡电动车的行进模式,让车模以两
个后轮 驱动进行直立行走。 在电磁组比赛中,利用 车模双后轮驱动的特点,实现两轮自平衡行走。相 对于传统的四轮行走的车 模竞赛模式,车模直立行走在硬件设计、控制软件开发 以及现场调试等方面提出了更高 的要求。
原理篇
原理篇
• 1.路径检测 • 2.直立控制 • 3.算法设计
• 路径检测的整体思路流程:
• 磁场感应 选频 放大 检波 A/D采集(单片机萨法尔定律可求得通电的导线周 围空间上某一定点的磁场强度。
• 再由法拉利定律和楞次定律可得处在该点处磁感线圈的感应 电动势大小
算法设计
• 在车模控制中的直立、速度和方向控制三个环节中,都使用 了比例微分(PD)控制,这三种控制算法的输出量最终通过 叠加通过电机运动来完成。 • (1)车模直立控制:使用车模倾角的PD(比例、微分)控 制;
• (2)车模速度控制:使用PD(比例、微分)控制; • (3)车模方向控制:使用PD(比例、微分)控制。
单 管 共 射 交 流 放 大 电 路
检波电路
• 测量放大后的感应电动势的幅值E可以有多种方法。最简单的 方法就是使用二极管检波电路将交变的电压信号检波形成直 流信号,然后再通过单片机的AD采集获得正比于感应电压幅 值的数值。
A/D输入
单片机
检测部分的系统框图
直立行走的原理
• 车模直立行走比赛是要求仿照两轮自平衡电动车的行进模式, 让车模以两个后轮驱动进行直立行走。
车模控制任务分解图
• 三个分解后的任务各自独立进行控制。由于最终都是对同一 个控制对象(车模的电机)进行控制,所以它们之间存在着 耦合。这三个任务中保持车模平衡是关键。由于车模同时受 到三种控制的影响,从车模平衡控制的角度来看,其它两个 控制就成为它的干扰。因此对车模速度、方向的控制应该尽 量保持平滑,以减少对于平衡控制的干扰
电机驱动电路总结
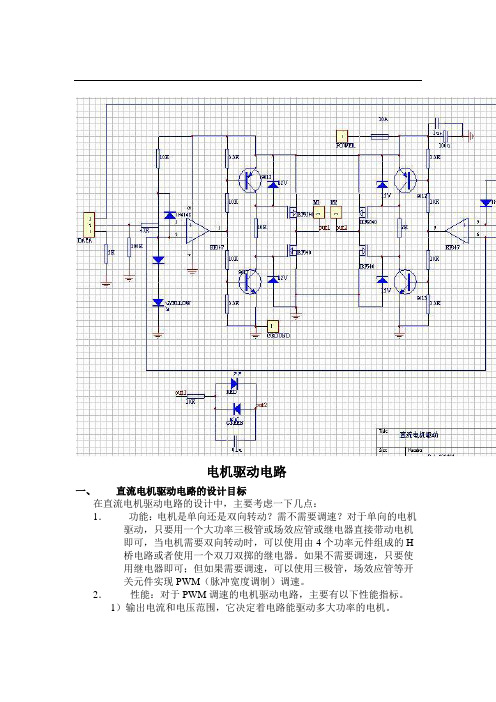
电机驱动电路一、直流电机驱动电路的设计目标在直流电机驱动电路的设计中,主要考虑一下几点:1.功能:电机是单向还是双向转动?需不需要调速?对于单向的电机驱动,只要用一个大功率三极管或场效应管或继电器直接带动电机即可,当电机需要双向转动时,可以使用由4个功率元件组成的H桥电路或者使用一个双刀双掷的继电器。
如果不需要调速,只要使用继电器即可;但如果需要调速,可以使用三极管,场效应管等开关元件实现PWM(脉冲宽度调制)调速。
2.性能:对于PWM调速的电机驱动电路,主要有以下性能指标。
1)输出电流和电压范围,它决定着电路能驱动多大功率的电机。
2)效率,高的效率不仅意味着节省电源,也会减少驱动电路的发热。
要提高电路的效率,可以从保证功率器件的开关工作状态和防止共态导通(H桥或推挽电路可能出现的一个问题,即两个功率器件同时导通使电源短路)入手。
3)对控制输入端的影响。
功率电路对其输入端应有良好的信号隔离,防止有高电压大电流进入主控电路,这可以用高的输入阻抗或者光电耦合器实现隔离。
4)对电源的影响。
共态导通可以引起电源电压的瞬间下降造成高频电源污染;大的电流可能导致地线电位浮动。
5)可靠性。
电机驱动电路应该尽可能做到,无论加上何种控制信号,何种无源负载,电路都是安全的。
二、三极管-电阻作栅极驱动(如果电路看不清楚请到相册里看)1.输入与电平转换部分:输入信号线由DATA引入,1脚是地线,其余是信号线。
注意1脚对地连接了一个2K欧的电阻。
当驱动板与单片机分别供电时,这个电阻可以提供信号电流回流的通路。
当驱动板与单片机共用一组电源时,这个电阻可以防止大电流沿着连线流入单片机主板的地线造成干扰。
或者说,相当于把驱动板的地线与单片机的地线隔开,实现“一点接地”。
高速运放KF347(也可以用TL084)的作用是比较器,把输入逻辑信号同来自指示灯和一个二极管的2.7V基准电压比较,转换成接近功率电源电压幅度的方波信号。
KF347的输入电压范围不能接近负电源电压,否则会出错。
智能车电机驱动模块使用详解(1)
智能车电机驱动模块使用详解智能车的驱动系统一般由控制器、电机驱动模块及电机三个主要部分组成。
智能车的驱动不但要求电机驱动系统具有高转矩重量比、宽调速范围、高可靠性,而且电机的转矩‐转速特性受电源功率的影响,这就要求驱动具有尽可能宽的高效率区。
控制器采用飞思卡尔16位单片机PWM功能完成,智能车电机一般每一届都有主委会提供,而且型号指定,参数固定。
一般提供的为直流电机。
其控制简单、性能出众、供电方便。
直流电机驱动模块一般使用H型全桥式电路实现电机驱动功能。
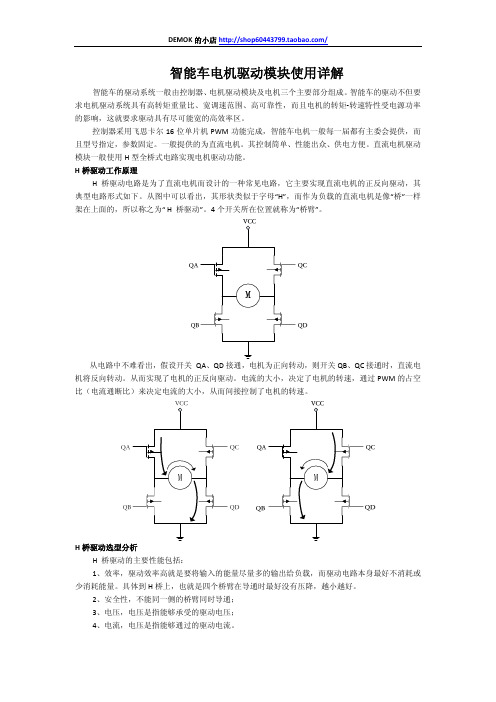
H桥驱动工作原理H 桥驱动电路是为了直流电机而设计的一种常见电路,它主要实现直流电机的正反向驱动,其典型电路形式如下。
从图中可以看出,其形状类似于字母“H”,而作为负载的直流电机是像“桥”一样架在上面的,所以称之为“ H 桥驱动”。
4个开关所在位置就称为“桥臂”。
从电路中不难看出,假设开关 QA、QD接通,电机为正向转动,则开关QB、QC接通时,直流电机将反向转动。
从而实现了电机的正反向驱动。
电流的大小,决定了电机的转速,通过PWM的占空比(电流通断比)来决定电流的大小,从而间接控制了电机的转速。
H桥驱动选型分析H 桥驱动的主要性能包括:1、效率,驱动效率高就是要将输入的能量尽量多的输出给负载,而驱动电路本身最好不消耗或少消耗能量。
具体到H桥上,也就是四个桥臂在导通时最好没有压降,越小越好。
2、安全性,不能同一侧的桥臂同时导通;3、电压,电压是指能够承受的驱动电压;4、电流,电压是指能够通过的驱动电流。
根据H桥驱动的主要特性分析,安全性主要由控制部分决定。
在智能车设计中,电机是固定型号的(一般组委会会提供车模和电机),所以所需的电流和电压时有限的,所以H桥驱动的选型会重点关注H桥驱动的效率,即关注MOS管的压降上。
因此我们选择H桥驱动遵循以下原则:(1)由于驱动电路是功率输出,要求开关管输出功率较大;(2)开关管的开通和关断时间应尽可能小;(3)小车使用的电源电压不高,因此开关管的饱和压降应该尽量低。
飞思卡尔智能车摄像头组技术报告 (2)
第十届“飞思卡尔”杯全国大学生智能汽车竞赛技术报告摘要本文设计的智能车系统以K60微控制器为核心控制单元,基于CCD摄像头的图像采样获取赛道图像信息,提取赛道中心线,计算出小车与黑线间的位置偏差,采用PD方式对舵机转向进行反馈控制。
使用PID控制算法调节驱动电机的转速,结合特定算法分析出前方赛道信息实现对模型车运动速度的闭环控制。
为了提高模型车的速度和稳定性,我们用C++开发了仿真平台、蓝牙串口模块、SD卡模块、键盘液晶模块等调试工具,通过一系列的调试,证明该系统设计方案是确实可行的。
关键词:K60,CCD摄像头,二值化,PID控制,C++仿真,SD卡AbstractIn this paper, we will design a intelligent vehicle system based on MC56F8366 as the micro-controller unit. using the CCD image sensor sampling to the track image information to extract the track line center, to calculate the positional deviation between the car with the black line, the use of PD on the rudder. The machine turned to the feedback control. We use PID control algorithm to adjust the speed of the drive motor, combined with specific algorithms to achieve closed-loop control of the movement speed of the model car in front of the track. In order to improve the speed and stability of the model car, we use the C++ to develop a simulation platform, Bluetooth serial module, SD card module, keyboard, LCD modules, debugging tools. Through a series of debugging, the system design is feasible.Key words: K60,CCD_camera, binaryzation, PID control, C++ simulation, SD card目录第1章引言................................................................................... - 1 - 第2章系统总体设计................................................................ - 2 - 2.1 系统分析..................................................................................... - 2 - 2.2 车模整体布局............................................................................. - 3 - 2.3 本章小结....................................................................................... - 4 - 第3章系统机械设计及实现................................................... - 5 - 3.1 前轮定位的调整......................................................................... - 5 -3.1.1主销内倾..............................................................................- 6 -3.1.2 后倾角.................................................................................- 6 -3.1.3 内倾角.................................................................................- 7 - 3.2 舵机安装....................................................................................... - 8 -3.2.1 左右不对称问题的发现与解决........................................- 10 - 3.3 编码器的安装............................................................................ - 10 - 3.4 摄像头安装.................................................................................- 11 -3.4.1 偏振镜的使用......................................................................- 12 -3.4.2 摄像头的标定......................................................................- 12 - 3.5 摄像头的选用.............................................................................- 13 - 3.6 红外接收装置.............................................................................- 14 -3.7 防止静电复位.............................................................................- 15 - 3.8 本章小结.......................................................................................- 15 - 第4章硬件电路系统设计及实现 ...................................... - 16 -4.1 硬件设计方案............................................................................- 16 - 4.2 电源稳压......................................................................................- 17 - 4.3 电机驱动......................................................................................- 18 - 4.4 图像处理部分............................................................................- 19 -4.4.1 摄像头升压电路.............................................................- 19 -4.4.2 视频分离电路.................................................................- 19 -4.4.3 硬件二值化.....................................................................- 19 - 4.5 灯塔电路......................................................................................- 21 - 4.6 本章小结......................................................................................- 21 -第5章系统软件设计.............................................................. - 22 -5.1 软件流程图...............................................................................- 22 - 5.2 算法新思路...............................................................................- 23 -5.2.1中心线提取.......................................................................- 23 -5.2.2 直角检测........................................................................... - 24 -5.2.3 单线检测......................................................................... - 24 - 5.3 舵机控制.....................................................................................- 25 - 5.4 速度控制.....................................................................................- 26 - 5.5 PID算法....................................................................................- 26 - 5.6 路径优化.....................................................................................- 31 -第6章系统联调...................................................................... - 33 - 6.1 开发工具.................................................................................... - 33 - 6.2 无线调试蓝牙模块及蓝牙上位机..........................................- 33 - 6.3 键盘加液晶调试......................................................................- 34 - 6.4 TF卡调试模块.........................................................................- 34 -6.4.1 TF卡.............................................................................- 34-6.4.2 SDCH卡 .........................................................................- 35 -6.4.3 软件实现.......................................................................- 36 - 6.5 C++上位机设计........................................................................- 36 - 6.6 电源放电模块...........................................................................- 38-6.6.1 镍镉电池记忆效应…………………………………….. - 39-6.6.2 放电及电池性能检测设备…………………………….. - 39- 6.7 本章小结....................................................................................- 40 - 第7章模型车技术参数........................................................ - 41 - 第8章总结............................................................................... - 42 - 参考文献...................................................................................... - 44 -第1章引言在半导体技术日渐发展的今天,电子技术在汽车中的应用越来广泛,汽车智能化已成为行业发展的必然趋势。
飞思卡尔智能车设计方法探讨
优 点就 是 无论 制 臂 状 态 如 何 , 桥 都 不会 出 现 “ H 共
态 导通 ” 短路 ) ( 。电路 图如 2所示 。
GD N
图 2 H 桥 电 路
圈 3 MC 3 8 芯 片 驱 动 电路 386
采用 C MO S管 搭 建 H 桥 , 特 点 是 内阻 小 , 其 驱
1 6 / n 工 作 效 率 最 大 。通 过 电 机 驱Байду номын сангаас动 模 块 40 0rmi, 控 制 电机 两端 电压 , 以使模 型车 加速运 行 , 可 也可对 模 型车进 行制 动 。可 以使 用 大功 率 晶体 管 、 桥 或 全
者半桥 电路 , 出 P 输 WM 波形 实现 对 电机 的控 制 。 通过 查阅 大 量 资 料 , 目前 主 流 R 3 0S 直 流 S 8一T
Q 4关 闭 , 电机 两 端均 为高 电平 , 电机 不转 ; 当控 制臂
要 电机 双 向旋 转控 制 , 需要 另一 片 B S 9 O共 同 则 T 76 组成 全桥 。图 为采 用 B 7 6 TS 9 0驱 动 芯 片 的 电路 如
图 4所 示 。
1 2均 为高 电平 时 , 、 、 Ql Q2关 闭 , 3 Q4导 通 , Q 、 电机 两 端均 为低 电平 , 机 也不 转 , 以 , 电路 有 一个 电 所 此
图 1 系统 结构 框 图
1 智 能 车整 体 设 计
系统 采 用 飞思 卡 尔半 导 体 公 司的 1 6位微 处理
2 驱 动 电路设 计
直 流 电机 的性 能受 驱 动 电路 的好 坏 影 响 , 的 好
驱 动 电路 可 以充 分发 挥 直 流 电机 的 性 能 , 而 为整 从 个智 能 车提供一个 性能 优越 的动力 系统 。飞思 卡尔
常用电机驱动电路及原理
EN1 和 EN2 一般使用时我们直接接高电平,使整个电路始终处于工作状态!
通过对上面电路的了解,大家应该大致了解了 H 桥的基本工作原理,有没有更 好地驱动电路了呢?答案是肯定的!以下是直流电动机的机械特性表达式:
n 是电机的转速,U N 是电机的两端的电压,Ce 、CT 、φN 对于我们来说可以看成一 个定值,Tem 是负载转矩,车做好之后该值基本确定不变,剩下一个重要的参数 Ra 电 机电枢回路的阻值,电机本身的内阻很小,如果外部引入的电阻过大,此时直流电 动机转速降落较大,驱动电路效率较低,电机性能不能充分发挥。为了提高 电机的转速我们应该尽量减小电机电枢回路绕组的阻值,我们知道:N 沟道的 MOS FET 具有极低的导通电阻,IRF3205 导通电阻在 8mΏ左右,而 IRF4905 几乎是其两 倍,那么是不是可以考虑全部使用 N 沟道的 3205 来搭我们的驱动电路呢,答案也 是肯定的,只不过需要换一片栅极驱动芯片就行!
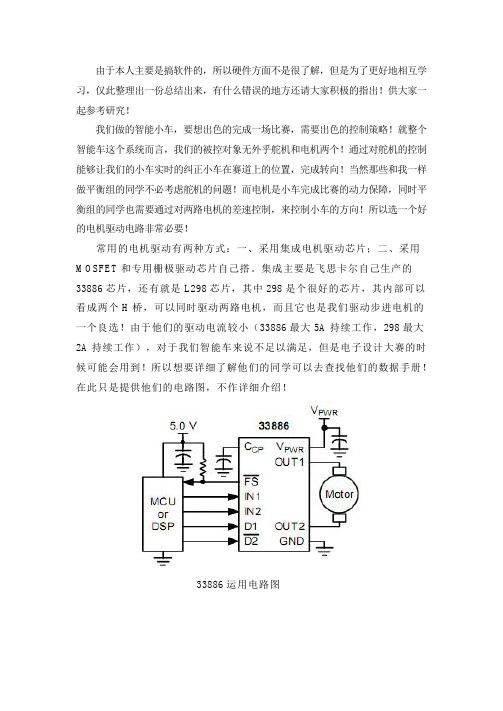
常用的电机驱动有两种方式:一、采用集成电机驱动芯片;二、采用 MOSFET 和专用栅极驱动芯片自己搭。集成主要是飞思卡尔自己生产的 33886 芯片,还有就是 L298 芯片,其中 298 是个很好的芯片,其内部可以 看成两个 H 桥,可以同时驱动两路电机,而且它也是我们驱动步进电机的 一个良选!由于他们的驱动电流较小(33886 最大 5A 持续工作,298 最大 2A 持续工作),对于我们智能车来说不足以满足,但是电子设计大赛的时 候可能会用到!所以想要详细了解他们的同学可以去查找他们的数据手册! 在此只是提供他们的电路图,不作详细介绍!
常用电机驱动电路及原理
我们做的智能小车,要想出色的完成一场比赛,需要出色的控制策略!就整个 智能车这个系统而言,我们的被控对象无外乎舵机和电机两个!通过对舵机的控制 能够让我们的小车实时的纠正小车在赛道上的位置,完成转向!当然那些和我一样 做平衡组的同学不必考虑舵机的问题!而电机是小车完成比赛的动力保障,同时平 衡组的同学也需要通过对两路电机的差速控制,来控制小车的方向!所以选一个好 的电机驱动电路非常必要!
那么当 PWM1=1 时,Q1 不导通,Q3 导通,电流的方向为 Q2—电机—Q3,电机正 转,当 PWM1=0 时,Q1 导通,Q3 不导通,即上桥臂导通,电机处于能耗制动状态!
同理不难得出:当 PWM1=0 是,PWM2=1 时,电机反转;PWM2=0 是下桥臂 导通,电机处于能耗制动状态!上面电路中的电阻电容 R1 和 C1 并联接地,R2 和 C2 并联接地,主要作用是构成阻容滤波,滤除尖脉冲!有时为了进一步的扩大驱动 电流,还常常两两并联,用两片 3205 并联成一片,两片 4905 并联成一片!组成的 H 桥的驱动电路电流将更大!
对于以上的电路,今年的电磁组A车和光电组D车来说,其驱动电流已经能够 满足,但是对于今年的摄像头组的B车模来说,可能有点吃力,B车的电机功率很 大,虽然正常正转时的电流不是很大,但是当我们加上我们的速度控制策略的时候, 很多时候车子是在不停的加减速,这就需要电机不停的正反转,此时的电流很大, 还用以上的驱动电路,芯片会很烫!!这个时候就需要我们自己用 MOSFET 和栅极 驱动芯片自己设计 H 桥!
其实 TC4427 只是两路同相的驱动器,买过该芯片的同学可能知道,虽说不贵, 但是也需要 9 块钱左右,而且用过该芯片的同学也可能有体会,该芯片不是太好, 有时会出现一个方向可以转,另一个方向不可以转的情况,我们是不是可以用其他 既廉价又有同样效果的芯片代替呢?其实我们可以想到的是我们常用的 74LS00,没 错,就是与非门,用它接成两路同相的驱动器,该电路同样好用,我所知道的队伍 中有人在用!
飞思卡尔芯片的嵌入式应用
飞思卡尔芯片的嵌入式应用飞思卡尔(英语:Freescale Semiconductor)是美国的半导体生产厂商。
飞思卡尔于2004年由原摩托罗拉的半导体部门组建。
飞思卡尔的主要产品为面向嵌入和通讯市场的芯片。
其产品包括:微控制器(Kinetis ARM® MCU、Qorivva(5xxx)32位Power Architecture MCU、MAC57Dxxx 32位ARM® MCU、ColdFire+/ColdFire 32位MCU、8位MCU、16位MCU、数字信号控制器、MCU编程中心)、处理器(i.MX ARM®应用处理器Vybrid ARM®控制器解决方案QorIQ处理平台PowerQUICC通信处理器Power Architecture主处理器图像识别处理器加密协处理器StarCore高性能DSPDSP56K/Symphony DSP)、模拟技术与电源管理、射频、传感器嵌入式系统的定义:“用于控制、监视或者辅助操作机器和设备的装置(Devices Used to Control,Monitor or Assist the Operation of Equipment,Machinery or Plants)”。
嵌入式系统包括:1、嵌入式微控制器(16位、8位、以及8位以下的CPU,典型代表就是单片机)2、嵌入式微处理器(32位,以及32位以上的称为处理器,典型为ARM核的处理器)3、DSP(Digital Signal Processing,数字信号处理器)4、SOC(System on Chip,片上系统,就是把所有的模块都做到一块芯片上)飞思卡尔芯片的嵌入式应用实例:一、飞思卡尔为未来智能电网开发解决方案:飞思卡尔不仅提供智能仪表设计所需要的芯片产品,而且提供完美解决方案。
对于公共事业单位如供电厂来说,如何优化配电基础设施,防止可能出现的大面积停电,以及如何有效的为最终用户提供能源服务,都需要智能仪表。
飞思卡尔
光电组、摄像头组、 光电组、摄像头组、电磁组简介
霍尔开关元件: 霍尔开关元件: 霍尔传感器是基于霍尔效应原理,将电流、 霍尔传感器是基于霍尔效应原理,将电流、 磁场、位移、压力、 磁场、位移、压力、压差转速等被测量转换 成电动势输出的一种传感器。虽然转换率低、 成电动势输出的一种传感器。虽然转换率低、 温度影响大、 温度影响大、要求转换精度较高时必须进行 温度补偿,但霍尔传感器具有结构简单、 温度补偿,但霍尔传感器具有结构简单、体 积小、坚固、频率响应宽(从直流到微波)、 积小、坚固、频率响应宽(从直流到微波)、 动态范围(输出电动势的变化) 无触点、 动态范围(输出电动势的变化)大、无触点、 寿命长、可靠性高, 寿命长、可靠性高,以及易于微型化和集成 电路化等优点。 电路化等优点。
光电组、摄像头组、 光电组、摄像头组、电磁组简介
理论上可以用密 绕的线圈作为传感器 去测量通电直导线的 磁场。 磁场。 实际上要用LC并联 实际上要用LC并联 LC 谐振电路放大感应电压, 谐振电路放大感应电压, 并且由于LC LC回路的选频 并且由于LC回路的选频 特性, 特性,可以去除一些噪 声。
‘飞思卡尔’智能车简介
大赛要求使用统一指定的竞赛 车模套件, 车模套件,采用飞思卡尔公司的 位微控制器MC9S12XS128 MC9S12XS128作为 16 位微控制器MC9S12XS128作为 核心控制单元, 核心控制单元,自主构思控制方 案进行系统设计, 案进行系统设计,包括传感器信 号采集处理、动力电机驱动、 号采集处理、动力电机驱动、转 向舵机控制以及控制算法等, 向舵机控制以及控制算法等,完 成智能车工程制作及调试。 成智能车工程制作及调试。
‘飞思卡尔’智能车简介
大赛组委会统一规定了车模和赛道标准, 大赛组委会统一规定了车模和赛道标准, 并且主要以速度为评判标准: 并且主要以速度为评判标准:
飞思卡尔k系列_ftm模块详解
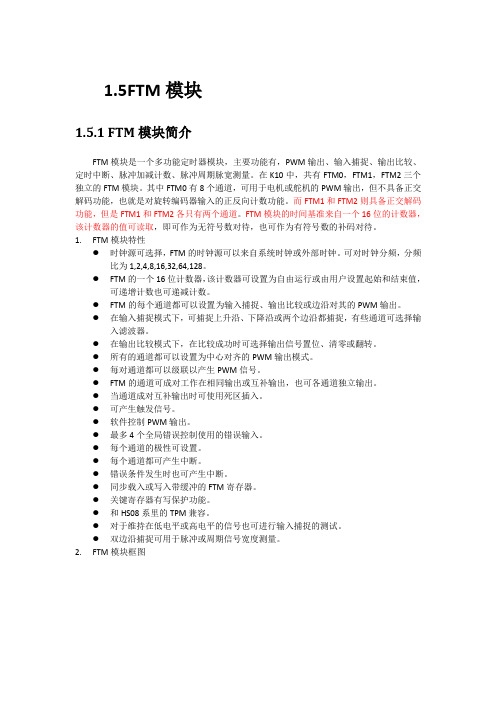
1.5FTM模块1.5.1 FTM模块简介FTM模块是一个多功能定时器模块,主要功能有,PWM输出、输入捕捉、输出比较、定时中断、脉冲加减计数、脉冲周期脉宽测量。
在K10中,共有FTM0,FTM1,FTM2三个独立的FTM模块。
其中FTM0有8个通道,可用于电机或舵机的PWM输出,但不具备正交解码功能,也就是对旋转编码器输入的正反向计数功能。
而FTM1和FTM2则具备正交解码功能,但是FTM1和FTM2各只有两个通道。
FTM模块的时间基准来自一个16位的计数器,该计数器的值可读取,即可作为无符号数对待,也可作为有符号数的补码对待。
1.FTM模块特性●时钟源可选择,FTM的时钟源可以来自系统时钟或外部时钟。
可对时钟分频,分频比为1,2,4,8,16,32,64,128。
●FTM的一个16位计数器,该计数器可设置为自由运行或由用户设置起始和结束值,可递增计数也可递减计数。
●FTM的每个通道都可以设置为输入捕捉、输出比较或边沿对其的PWM输出。
●在输入捕捉模式下,可捕捉上升沿、下降沿或两个边沿都捕捉,有些通道可选择输入滤波器。
●在输出比较模式下,在比较成功时可选择输出信号置位、清零或翻转。
●所有的通道都可以设置为中心对齐的PWM输出模式。
●每对通道都可以级联以产生PWM信号。
●FTM的通道可成对工作在相同输出或互补输出,也可各通道独立输出。
●当通道成对互补输出时可使用死区插入。
●可产生触发信号。
●软件控制PWM输出。
●最多4个全局错误控制使用的错误输入。
●每个通道的极性可设置。
●每个通道都可产生中断。
●错误条件发生时也可产生中断。
●同步载入或写入带缓冲的FTM寄存器。
●关键寄存器有写保护功能。
●和HS08系里的TPM兼容。
●对于维持在低电平或高电平的信号也可进行输入捕捉的测试。
●双边沿捕捉可用于脉冲或周期信号宽度测量。
2.FTM模块框图由图可见,FTM模块的核心是一个16位计数器,该计数器的时钟源可以选择,如果我们选择由FTM来实现PWM,输入捕捉,或者输出比较,定时中断,脉宽测量等功能,则一般选择system clock。
飞思卡尔 所有的算法

第1章电机控制1.1. 直流电机控制策略:针对本文所研究的智能车来说,车体速度是大惯性的被控对象。
算法输出的控制量只能对电机输出力进行控制。
而有一定负载时电机的输出力无论对车轮的转速还是车体的形式速度都是不成正比的,车在刚开始启动的时候速度是零,而电机的输出可能很大;车在匀速行驶的时候速度很快,而电机的输出可能并不是很大。
而且电池电量、车体重量都会对车速造成影响。
因此只有用闭环才能对车速进行良好的控制。
在车轮对地面不打滑的情况下车体的速度和后轮的转动速度是成正比的。
因此我们可以直接用光电码盘对后轮的转速进行控制。
对于这样一个大惯性系统,我们选用PID和鲁棒相结合的办法进行速度控制。
回路的设定值由经验值确定。
考虑到速度控制通道的时间滞后比较小,因此采用PID 控制方案,并在进行加减速控制时,引入了“棒棒控制”。
U(k + 1) = U(K) + P1 * e(k) + P2 * (e(k) – e(k - 1)) + P3 * ((e(k) – e(k-1) – (e(k-1) – e(k - 2)));公式1-1 PID的公式其中第一项为积分项;第二项为比例项;第三项为微分项。
考虑到被控对象(车体速度)本身是一个大的积分环节,公式中可以将第一项省略,即采用PD控制。
E 为误差。
同时设定误差门限,在误差比较大的时候采用大输出控制电机,将误差在最短时间内减小到所要求的范围,这就是鲁棒控制的思想。
电机控制策略,其实就是对模型车速度的控制策略,它是继路径识别之后非常重要的策略,直接关系到整个模型车比赛的性能。
速度控制得当,小车才能以最好的状态,在最短的时间完成比赛路程。
1.1.1.弯道速度控制在模型车入弯时刻出于稳定性考虑做减速控制。
减速原则是在原来直道速度设定值的基础上,减小速度设定值到低速挡,保证模型车可以安全入弯。
另一方面,入弯之后,为了过弯时模型车能够不明显的左右摆动并采用较好的姿态通过弯路,令车速与偏差成线性关系,偏差越大速度设定值越小。
(完整word版)飞思卡尔智能车技术报告
集成化的设计思路的好处是原件密度高,系统可以小型化一体化,通过综合考虑各方面因素,在确定了系统最终硬件方案不做大的更改的情况下,在确保了系统可靠性的前提下,最终选择了一体化,集成化的硬件设计思路。使车体硬件电路布局紧凑,稳定可靠。
3、大前瞻,高分辨率方案。
在光电传感器的安装不影响赛车行驶的前提下,尽可能的提高传感器前瞻,更大的前瞻,能为赛车提供更多的信息,更能让赛车提前作出决策。
3.5.2主销内倾角
主销内倾角是指主销在汽车的横向平面内向倾斜一个角度,即主销轴线与地面垂直线在汽车横向断面内的夹角。主销内倾角也有使车轮自动回正的作用。通常汽车主销内倾角不大于80。
2.5.3前轮外倾角
通过车轮中心的汽车横向平面与车轮平面的交线与地面垂线之间的夹角称为“前轮外倾角”。轮胎呈现“八”字形张开时称为“负外倾”,而呈现“V”字形张开时称为“正外倾”。一般前轮外倾角为10左右。
4.5速度检测模块
为了使车在跑的过程中能快速加速,及时减速除了要有好的算法来控制,还依赖于速度闭环返回的速度脉冲值的可靠度和精确度,因此为了提高检测精度,最后选用了精度较高的光电编码器,光电编码器使用5V-24V电源,输出12.5%-85%VCC的方波信号。
9.2存在的不足
9.3可改进的方法
第十章参考文献
第一章引言
1.1方案介绍
系统硬件设计可以说是整个智能车设计的基础和重中之重。正确的硬件设计方向与思路,是系统稳定可靠的基础,功能强大的硬件系统,更为软件系统的发挥提供了强大的平台。、
1、整车低重心设计。
通过以往几届比赛的经验我们看到,往往重心低,体积小巧,布局紧凑的赛车更能取得好的成绩。、于是,我们通过合理布局电路板和各种传感器,尽可能地降低整车重心。在不影响传感器前瞻,或者不过度牺牲传感器性能的情况下,尽量降低光电传感器的高度,以提高赛车的侧翻极限。
电机驱动方案

4.1.2 电机驱动模块电机的驱动可以使用专用的电机驱动芯片、达林顿管驱动、场效应管驱动。
电机驱动芯片MC33886,内部具有过流保护电路,刹车效应好,接口简单易用,虽然能够提供比较大的驱动电流,但对于小车骤然加速时所需的电流还是不够的,发热量也比较大,若使用达林顿管作驱动管,其等效电阻也相对比较大,发热量也会比较大,不利于电机转速的骤起骤降驱动,使用场效应管作为驱动管,其导通电阻可以达到毫欧级,且可以提供强大驱动电流,最后选用场效应管做驱动电路。
电机驱动电路大家常用的是MC33886,几片并联的,我们以前也是这样,但芯片很热,不好加散热片,但归根结蒂还是芯片驱动电流小,内阻大所致。
根本办法是用场效应管搭建H桥来驱动电机。
场效应管具有内阻极小、开关速度快等诸多优点。
并且加散热片很方便(不像33886).不要认为使用场效应管很困难,智能车的驱动系统一般由控制器、电机驱动模块及电机三个主要部分组成。
智能车的驱动不但要求电机驱动系统具有高转矩重量比、宽调速范围、高可靠性,而且电机的转矩‐转速特性受电源功率的影响,这就要求驱动具有尽可能宽的高效率区。
控制器采用飞思卡尔16 位单片机PWM 功能完成,智能车电机一般每一届都有主委会提供,而且型号指定,参数固定。
一般提供的为直流电机。
其控制简单、性能出众、供电方便。
直流电机驱动模块一般使用H 型全桥式电路实现电机驱动功能。
2.6 电机驱动电路设计对于电机驱动电路,我们用全桥驱动电路作为电机的驱动。
主要是看好它控制简单,并且驱动能力也不错。
用全桥可以让车模在高速入弯时顺利刹车减速入弯。
两片英飞凌公司的PN 型半桥芯片BTS7960 联立就可以组成全桥。
BTS7960封装及管脚分配如图2-5 所示。
这种方案较之其他常规的MOS 管H桥有多方优势。
只两片芯片,硬件电路简单,并且减轻车模重量。
我们就是采用两个半桥联立成的全桥作为电机驱动电路。
实际应用中我们采用4 片半桥芯片,两两并联组成全桥,做出来的电路板尺寸只有:37.2mm×32.7mm,如图2-6 所示。
飞思卡尔光电组套件智能车XS128K60介绍

此智能车模,配套的电机型号为RN260-CN-2875。智能车的控制采用的是双后轮驱动方案。智能车的外形大致如下:
智能汽车外形图
2.2
车模中的传感器包括有:速度传感器,车模姿态传感器(陀螺仪、加速度计)以及线形CCD。下面分别介绍这些传感器的安装。
2.2.1
速度编码器我们采用了编码器,安装方法如下:
为了保护模型车传感器支架,在车模机械设计的时候,增添了防撞保护装置,使一旦车模倾倒或者失控,防撞保护装置可保护车模机械的安全性,保证小车状态的稳定性。
飞思卡尔光电组套件智能车XS128 K60介绍
智能汽车外形图
第一章
智能汽车系统总体设计思路,后面将整个系统分为机械结构、控制模块、控制算法等三部分对智能汽车控制系统进行深入的介绍。光电组用了线性ccd,但是由于需要镜头成像,所以会带来成像失真,静电干扰严重等问题。由于平衡车的特殊性,车身在循迹前进的过程中,必须保持车身的平衡。根据最基本保持车身平衡的基本原理,需要知道车身当前的角度和角速度。因此在保持车身平衡方面,以加速度计作为角度传感器,陀螺仪作为角速度传感器。
用十字扳手套筒将车的后轮拆卸后,安装编码器,固定编码器的固定件是根据
车得尺寸及与编码器的相对位置手工制作的连接固定件。
在安装完后轮后,在利用十字扳手套筒将后轮装上。
安装时应注意调整好齿轮间隙。齿轮传动机构对车模的驱动能力有很大的影响。齿轮传动部分安装位置的不恰当,会大大增加电机驱动后轮的负载,会严重影响最终成绩。调整的原则是:两传动齿轮轴保持平行, 齿轮间的配合间隙要合适,过松容易打坏齿轮,过紧又会增加传动阻力,浪费动力;传动部分要轻松、顺畅,不能有迟滞或周期性振动的现象。判断齿轮传动是否良好的依据是,听一下电机带动后轮空转时的声音。声音刺耳响亮,说明齿轮间的配合间隙过大,传动中有撞齿现象;声音闷而且有迟滞,则说明齿轮间的配合间隙过小,或者两齿轮轴不平行,电机负载变大。调整好的齿轮传动噪音很小,并且不会有碰撞类的杂音,后轮减速齿轮机构就基本上调整好了,动力传递十分流畅。如图所示。
飞思卡尔DSC电机控制产品方案介绍 - 告别C2000

• •
• •
TM
External Use
2
飞思卡尔电机控制的多种选择 飞思卡尔电机控制的多种选择
Production Planning
New 90nm
TM
External Use
7
Freescale DSC兼容性
56F84789/786 /587/585
256
128
56F84763 /462 56F84550 /451 56F84540 /441 56F82743 56F8255 56F8256 56F82746 56F8246 56F82736 56F82726 56F82316 44LQFP 48LQFP 64LQFP 56F84553 /452 56F84543 /442 56F8257 56F82748 56F8247 56F82738 56F82728
GPIO
DMA 增加处理器的吞吐量, 使得控制算法更高效
输入分主和次,功能有: 边沿,窗口,正交,带 符号,触发,级联,捕 获,比较
TM
External Use
6
Freescale DSC Roadmap
-成本与性能优化 …. 高级控制环算法 苛刻的实时应用 - 包括 高级电机控制 太阳能逆变 更多………..
56800E V3 Core 100MHz
JTAG/EOnCE
PLL
OSC 8Mhz / 32KHz 2 x PIT (RTC) Inter-Module CrossBar