单片机整套实验及程序(交通灯_跑马灯等)
用单片机控制交通灯源程序代码及流程图

用单片机控制交通灯传统的交通灯控制电路一般由数字电路构成,电路复杂、体积大、成本高。
采用单片机控制交通灯不但可以解决上述问题,而且还具有时间显示功能,非常方便。
下面介绍一种用单片机控制交通灯的方法。
一、硬件硬件电路如附图。
AT89C2051的P1.7~P1.5和P1.3~P1.1直接驱动红、黄、绿灯,利用单片机的串口和二片74LS164串/并转换移位寄存器实现时间显示,七段数码管为共阴管,硬件电路极为简单。
二、软件交通灯有红、黄、绿三种。
红灯亮,停止通行;绿灯亮,允许通行;黄灯亮,作过渡。
红灯亮60秒,绿灯亮55秒,黄灯亮5秒。
每组灯的亮暗状态以2分钟为周期循环,故程序采用主、子程序方式,循环结构。
另外,为了简化电路,红、黄、绿灯采用低电平点亮。
源程序清单如下:ORG0000HSTART:MOVDRTR,#TABMOVSCON,#00HMOVP1,#6CH;点亮红、绿灯MOVR0,#0;R0清零LEFT:INCR0CJNER0,#55,LP0;R0<55,转LP0MOVP1,#6AH;R0=55,点亮红、黄灯LJMPLP1LP0:CJNER0,#60,LP1;R0<60,转LP1MOVP1,#0C6H;R0=60,点亮绿、红灯LJMPRIGHTLP1:LCALLDBDBLCALLDISPLJMPLEFT;20H为1,转LEFTRIGHT:DECR0CJNER0,#5,LP2;R0>0,转LP2MOVP1,#0A6H;R0=5,点亮黄、红灯LJMPLP3LP2:CJNER0,#0,LP3MOVP1,#6CH;R0=0,点亮红、绿灯LJMPLEFTLP3:LCALLDBDBLCALLDISPLJMPRIGHTDBDB:MOVA,R0MOVB,#10DIVABMOVR1,AMOVR2,BRETDISP:MOVA,R2MOVCA,@A+DPTRMOVSBUF,AJNBTI,$;查TI位CLRTIMOVA,R1MOVCA,@A+DPTRMOVSBUF,AJNBT1,$CLRTILCALLDEALYRETDELAY:MOVR3,#09HK1:MOVR4,#100K2:MOVR5,#250K3:DJNZR5,K3DJNZR4,K2KJNZR3,K1RETTAB:DB3FH,06H,5BHDB4FH,66HDB6DH,7DH,07HDB7FH,6FH三.实验电路及连线四.实验说明1.因为本实验是交通灯控制实验,所以要先了解实际交通灯的变化规律。
单片机课程设计--跑马灯设计

单片机课程设计(跑马灯设计)专业:电气自动化摘要AT89C51是一种带4K字节闪存可编程可擦除只读存储器)(FPEROM—Flash Programmable and Erasable Read Only Memory 的低电压、高性能CMOS 8位微处理器,即单片机。
AT89C2051是一种带2K字节闪存可编程可擦除只读存储器的单片机。
单片机的可擦除只读存储器可以反复擦除1000次。
该器件采用ATMEL高密度非易失存储器制造技术制造,与工业标准的MCS-51指令集和输出管脚相兼容。
该设计使用A T89C51芯片作为控制芯片,利用P1口连接8个发光二极管,通过I/O的值控制“跑马灯”的亮灭,以达到显示效果。
开始时所有灯全亮,按下按键S时开始跑马灯,再按下按键S时停止,再按下S时继续,并要求有多种亮暗组合。
时继续,并要求有多种亮暗组合。
按键跑马灯 按键单片机 跑马灯关键词:A T89C51单片机目录摘要 (I)第一章芯片分析和设计概述 (3)第一节 AT89C51芯片分析 (3)第一节第二节 设计概述 (8)第二节第二章硬件电路设计 (9)第三章程序部分设计 (10)参考文献 (18)第一章 芯片分析和设计概述第一节 AT89C51芯片分析ATMEL 的AT89S51是一种高效微控制器,将多功能8位CPU 和闪烁存储器组合在单个芯片中,为很多嵌入式控制系统提供了一种灵活性高且价廉的方案。
且价廉的方案。
AT89C51AT89C51的芯片引脚图如下:的芯片引脚图如下:图1.1 AT89C51引脚图引脚图各引脚的说明和功能分析如下:各引脚的说明和功能分析如下:VCC VCC:供电电压。
:供电电压。
:供电电压。
GND GND:接地。
:接地。
:接地。
P0口:口:P0P0口为一个8位漏级开路双向I/O 口,每脚可吸收8TTL 门电流。
当P1口的管脚第一次写1时,被定义为高阻输入。
时,被定义为高阻输入。
P0P0能够用于外部程序数据存储器,它可以被定义为数据外部程序数据存储器,它可以被定义为数据//地址的第八位。
单片机交通灯实验报告(一)
单片机交通灯实验报告(一)引言概述:交通灯是城市交通管理的重要组成部分,通过控制红绿灯的变化,实现车辆和行人的有序通行。
本文将详细介绍单片机交通灯实验的设计与实现,包括硬件设计、程序编写和实验结果分析。
正文:一、硬件设计1. 确定电路所需元件:单片机、LED灯、电阻等。
2. 组装硬件电路:按照电路图进行元件的连接,确保电路的正确连接。
3. 设计适当的电源:为单片机和LED灯提供稳定的电源。
二、程序编写1. 定义程序所需的IO口:确定控制LED灯的IO口。
2. 初始化单片机:设置单片机的工作频率和中断。
3. 设计交通灯的流程控制:根据实际的交通灯变化规律,设计程序的流程控制。
4. 编写交通灯控制的函数:使用if-else语句或switch-case语句编写函数控制交通灯的变化。
5. 调试程序:通过单片机调试工具或仿真软件,检查程序运行的正确与否。
三、实验结果分析1. 观察实验现象:通过实验现场观察交通灯的变化,记录每一种灯亮的时间和顺序。
2. 分析实验结果:根据实验记录,分析交通灯的工作原理和实现的准确性。
3. 比较与设计要求的符合度:将实验结果与设计要求进行比较,评估实验的完成度。
4. 探讨存在问题与改进方向:分析实验中可能存在的问题,并提出改进措施。
四、小结本文介绍了单片机交通灯实验的设计与实现。
通过硬件设计和程序编写,实现了交通灯的变化控制。
通过实验结果分析,我们可以得出实验的有效性和可行性。
当然,实验中也存在一些问题,需要进一步改进。
在后续的实验中,我们将进一步完善交通灯的控制,提高其实际应用的稳定性和可靠性。
总结:本文详细介绍了单片机交通灯实验的设计与实现,包括硬件设计、程序编写和实验结果分析。
通过该实验,我们对交通灯的工作原理和控制方法有了更为深入的了解,并对实验的经验和教训进行了总结。
相信在今后的学习和实践中,我们能够更好地应用单片机技术,为实现交通管理的智能化和高效化作出贡献。
单片机整套实验及程序(交通灯_跑马灯等)
实验1 跑马灯实验一、实验目的●初步学会Proteus ISIS和uVision2单片机集成开发环境的使用;●初步掌握采用汇编语言与C语言开发单片机系统的程序结构;●掌握80C51单片机通用I/O口的使用;●掌握单片机内部定时/计数器的使用及编程方法以及中断处理程序的编写方法。
二、实验设备及器件●硬件:PC机,HNIST-1型单片机实验系统●软件:Proteus ISIS单片机仿真环境,uVision2单片机集成开发环境三、实验内容●编写一段程序,采用P1口作为控制端口,使与P1口相接的四个发光二极管〔D1、D2、D3、D4〕按照一定的方式点亮。
如点亮方式为:先点亮D1,延时一段时间,再顺序点亮D2……D4,然后又是D4……D1,同时只能有一个灯亮;然后每隔一段时间一次使相邻两个灯亮,三个灯亮,四个灯亮,最后闪烁三次,接着循环变化。
●基于Proteus ISIS仿真环境完成上述功能的仿真。
●基于uVision2单片机集成开发环境与硬件平台完成程序的脱机运行。
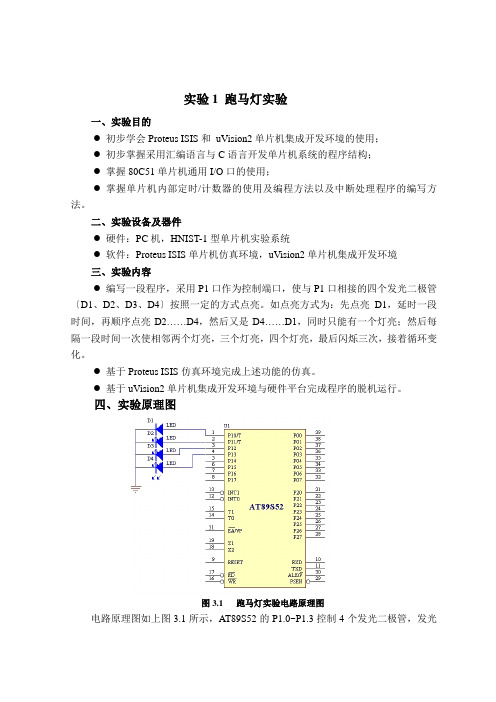
四、实验原理图图3.1 跑马灯实验电路原理图电路原理图如上图3.1所示,AT89S52的P1.0~P1.3控制4个发光二极管,发光二极管按照一定次序发光,相邻发光二极管的发光时间间隔可以通过定时器控制,还可以通过软件延时实现。
五、软件流程图与参考程序●主程序流程图如下:●参考程序#include<reg52.h>#include<intrins.h>#define uchar unsigned char#define uint unsigned intuchar aa,num,speed,flag;uchar code table[]={0x0e,0x0d,0x0b,0x07};uchar code table1[]={0x0a,0x05,0x09,0x06};uchar codetable2[]={0x0c,0x09,0x03,0x08,0x01,0x0e,0x0c,0x08,0x00};void delay(uint z)//延时函数{uint x;uchar y;for(x=z;x>0;x--)for(y=200;y>0;y--);}void init()//条件初始化函数{ flag=0;speed=10;//控制跑马灯流水速度TMOD=0x01;//中断方式TH0=(65535-50000)/256;TL0=(65536-50000)%256;//初值EA=1;//翻开总中断ET0=1;//翻开外中断0TR0=1;}void main(){init();//调用初始化函数while(1){if(flag){delay(2000);//调用延时函数for(num=0;num<4;num++)//从左至右间隔一个依次闪烁{P1=table[num];delay(2000);}for(num=3;num>0;num--)//从左至右间隔一个依次闪烁{P1=table[num];delay(2000);}for(num=0;num<4;num++)//从左至右间隔两个依次闪烁{P1=table1[num];delay(2000);}for(num=3;num>0;num--)//从左至右间隔两个依次闪烁{P1=table1[num];delay(2000);}for(num=0;num<6;num++)//两个,三个,四个跑马灯依次闪烁{P1=table2[num];delay(2000);}for(num=0;num<5;num++)//闪烁5次{P1=0xff;//全暗delay(2000);P1=0X00;//全亮delay(2000);}speed=speed-3;//变速if(speed==4){speed=10;}}}}void timer0() interrupt 1//中断函数{TH0=(65535-50000)/256;TL0=(65536-50000)%256;aa++;if(aa==speed){aa=0;flag=1;}}六、实验思考题●请用汇编指令完本钱实验内容,深刻理解汇编语言程序设计结构。
《单片机原理及应用》跑马灯
《单片机原理及应用》跑马灯设计说明书第一章设计任务此次单片机设计任务是要求:按下按键三之后,灯的上半部分(四个灯)和下半部分交替闪烁9次,按下按键四之后,灯光全亮全灭九次。
在执行跑马灯的代码时,按下按键四,执行全亮全灭的时候,再按下按键三,灯光会先执行按键三的指令,然后再执行按键四的指令,也就是说按键三比按键四的优先级高,这就是此次单片机的设计任务。
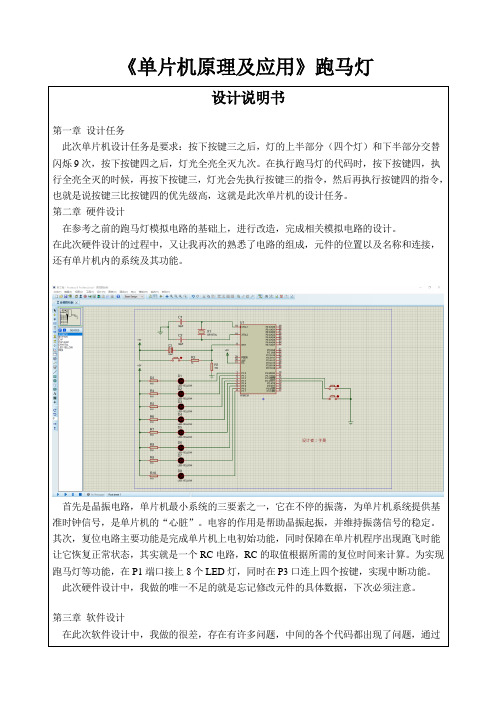
第二章硬件设计在参考之前的跑马灯模拟电路的基础上,进行改造,完成相关模拟电路的设计。
在此次硬件设计的过程中,又让我再次的熟悉了电路的组成,元件的位置以及名称和连接,还有单片机内的系统及其功能。
首先是晶振电路,单片机最小系统的三要素之一,它在不停的振荡,为单片机系统提供基准时钟信号,是单片机的“心脏”。
电容的作用是帮助晶振起振,并维持振荡信号的稳定。
其次,复位电路主要功能是完成单片机上电初始功能,同时保障在单片机程序出现跑飞时能让它恢复正常状态,其实就是一个RC电路,RC的取值根据所需的复位时间来计算。
为实现跑马灯等功能,在P1端口接上8个LED灯,同时在P3口连上四个按键,实现中断功能。
此次硬件设计中,我做的唯一不足的就是忘记修改元件的具体数据,下次必须注意。
第三章软件设计在此次软件设计中,我做的很差,存在有许多问题,中间的各个代码都出现了问题,通过此次的失败,我总结了经验,明白了中断设计的函数应该怎那么写,参考了一下往日的作业,基本弄清了这类代码应该怎么写,但是仍然不熟练,还是需要多加练习,多加思考,争取能够自己独立写出程序代码。
第四章调试过程调试失败,在改进之后的代码进入调试之后,还是成功了的。
第五章总结此次单片机设计测试中主要考察了中断系统的使用,同时在硬件的设计上也有了更多的要求,在编写代码的同时还需要自主的设计和铺设电路,此次代码编写需要考虑全面,容易缺少程序,需要细心编写。
同时,在编写代码的时候,容易出错,出错的时候不能够慌,应该细心下来思考问题所在,此次测试中,看出来了我自身写代码的经验不足,使得代码编写非常错误,还有就是平时训练的还是比较少,以后应该多加训练。
单片机 跑马灯实验精选全文
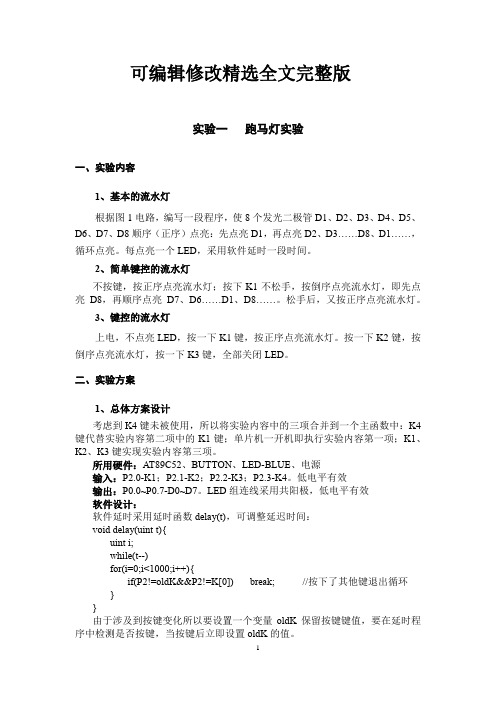
可编辑修改精选全文完整版实验一跑马灯实验一、实验内容1、基本的流水灯根据图1电路,编写一段程序,使8个发光二极管D1、D2、D3、D4、D5、D6、D7、D8顺序(正序)点亮:先点亮D1,再点亮D2、D3……D8、D1……,循环点亮。
每点亮一个LED,采用软件延时一段时间。
2、简单键控的流水灯不按键,按正序点亮流水灯;按下K1不松手,按倒序点亮流水灯,即先点亮D8,再顺序点亮D7、D6……D1、D8……。
松手后,又按正序点亮流水灯。
3、键控的流水灯上电,不点亮LED,按一下K1键,按正序点亮流水灯。
按一下K2键,按倒序点亮流水灯,按一下K3键,全部关闭LED。
二、实验方案1、总体方案设计考虑到K4键未被使用,所以将实验内容中的三项合并到一个主函数中:K4键代替实验内容第二项中的K1键;单片机一开机即执行实验内容第一项;K1、K2、K3键实现实验内容第三项。
所用硬件:AT89C52、BUTTON、LED-BLUE、电源输入:P2.0-K1;P2.1-K2;P2.2-K3;P2.3-K4。
低电平有效输出:P0.0~P0.7-D0~D7。
LED组连线采用共阳极,低电平有效软件设计:软件延时采用延时函数delay(t),可调整延迟时间:void delay(uint t){uint i;while(t--)for(i=0;i<1000;i++){if(P2!=oldK&&P2!=K[0])break;//按下了其他键退出循环}}由于涉及到按键变化所以要设置一个变量oldK保留按键键值,要在延时程序中检测是否按键,当按键后立即设置oldK的值。
按键判断采用在while循环中利用条件语句判断P2的值然后执行该键对应的代码段,达到相应的响应。
为了让K4键的效果优化,即状态变化从当前已亮灯开始顺序点亮或逆序点亮,利用全局变量n来记录灯号,利用算法即可实现。
主要算法:1、全局变量的定义:uchar D[]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0X7f};//单个LED亮uchar AllOff=0xff;//LED全灭uchar AllOn=0x00;//LED全亮uchar K[]={0xff,0xfe,0xfd,0xfb,0xf7};//按键开关uchar oldK;//记录已按键int n;2、顺序、逆序点亮流水灯:void forward(){for(n=0;n<=7;n++){out=D[n];delay(15);if(P2!=oldK&&P2!=K[0])break;}out=AllOff;}void backward(){for(n=7;n>=0;n--){out=D[n];delay(15);if(P2!=oldK&&P2!=K[0])break;}out=AllOff;}3、实验内容第二项流水灯灯亮顺序变换:void hold(){n=8;while(1){if(P2==K[4]){//一直按着K4键,逆序点亮跑马灯oldK=K[4];if(n==-1)n=7; //D0灯亮后点亮D7while(n>=0){out=D[n];n--;if(delay4(15))break;}}if(P2==K[0]){//未按下K4键,一直正序点亮跑马灯oldK=K[0];if(n==8)n=0;//D7灯亮后点亮D0while(n<=7){out=D[n];n++;if(delay4(15))break;}}if(P2!=K[4]&&P2!=K[0]){//按下了其他键,退出hold函数break;}}}4、对应实验内容第一项,开机顺序点亮流水灯:while(1){//开机即正序点亮流水灯forward();if(P2!=K[0]){break;}}2、实验原理图图2-1 实验原理图3、程序流程图图2-2 程序流程图三、源程序#include"reg51.h"#define uchar unsigned char#define uint unsigned int#define out P0uchar D[]={0xfe,0xfd,0xfb,0xf7,0xef,0xdf,0xbf,0X7f};//单个LED亮uchar AllOff=0xff;//LED全灭uchar AllOn=0x00;//LED全亮uchar K[]={0xff,0xfe,0xfd,0xfb,0xf7};//按键开关uchar oldK;//记录已按键int n;//记录当前亮的灯号void delay(uint t){uint i;while(t--)for(i=0;i<1000;i++){if(P2!=oldK&&P2!=K[0])break;//按下了其他键退出循环}}void delay10ms(){uint i;for(i=0;i<10000;i++);}void forward(){for(n=0;n<=7;n++){out=D[n];delay(15);if(P2!=oldK&&P2!=K[0])break;}out=AllOff;}void backward(){for(n=7;n>=0;n--){out=D[n];delay(15);if(P2!=oldK&&P2!=K[0])break;}out=AllOff;}int delay4(uint t){uint i;while(t--)for(i=0;i<1000;i++){if(P2!=oldK){ //按键变化退出循环return 1;}}return 0;}void hold(){n=8;while(1){if(P2==K[4]){//一直按着K4键,逆序点亮跑马灯oldK=K[4];if(n==-1)n=7; //D0灯亮后点亮D7while(n>=0){n--;if(delay4(15))break;}}if(P2==K[0]){//未按下K4键,一直正序点亮跑马灯oldK=K[0];if(n==8)n=0;//D7灯亮后点亮D0while(n<=7){out=D[n];n++;if(delay4(15))break;}}if(P2!=K[4]&&P2!=K[0]){//按下了其他键,退出hold函数break;}}}void main(){oldK=K[0];while(1){//开机即正序点亮流水灯forward();if(P2!=K[0]){break;}}while(1){out=AllOff;if((P2&0x0f)!=0x0f){//检测有键按下delay10ms();//延时10ms再去检测//P2.0_K1键按下正序点亮流水灯if(P2==K[1]){oldK=K[1];while(1){forward();if(P2!=K[1]&&P2!=K[0]){//按下了其他键,退出break;}}}//P2.1_K2键按下逆序点亮流水灯if(P2==K[2]){while(1){backward();if(P2!=K[2]&&P2!=K[0]){//按下了其他键,退出break;}}}//P2.2_K3键按下关闭全部LEDif(P2==K[3]){oldK=K[3];out=AllOff;}//P2.3_K4键按下长按逆序点亮流水灯,不按正序点亮流水灯,直到其他键按下停止if(P2==K[4]){hold();}}}}四、实验结果1、基本的流水灯:开机后即重复顺序点亮流水灯,等待其他按键。
单片机交通灯实验报告

单片机交通灯实验报告实验目的:1.熟悉单片机的基本工作原理和编程方法。
2.学习如何使用单片机控制交通灯的运行。
3.加深对电子元器件和电路原理的理解和掌握。
实验器材:1.51系列单片机开发板:包括单片机主控板、显示器板、外部扩展板等。
2.LED灯:红色、黄色、绿色各一颗。
3.电阻:用于限流。
4.连接线:用于连接各个电子元器件。
实验原理:在交通中,红灯代表停止、黄灯代表警告、绿灯代表通行。
在本实验中,我们将使用单片机控制三个LED灯实现交通灯的运行。
具体原理如下:1.使用单片机的IO口控制LED灯的亮灭。
2.根据交通灯的运行状态,通过改变LED灯的亮灭顺序来模拟交通的运行。
实验步骤:1.连接电路:将三个LED灯连接到单片机的IO口,并通过电阻限流。
2.编写程序:使用C语言编写程序,在主函数中设置交通灯的运行状态和亮灭顺序。
3.烧写程序:将编写好的程序烧写到单片机中。
4.运行实验:启动单片机,观察LED灯的亮灭情况,验证交通灯是否能正常工作。
实验结果:经过实验,我们成功地实现了单片机交通灯的控制。
在程序运行过程中,红灯先亮,表示停止;然后黄灯亮,表示警告;最后绿灯亮,表示通行。
整个过程循环不断,符合实际交通灯的运行规律。
实验总结:通过这次实验,我深入了解了单片机的基本工作原理和编程方法,掌握了使用单片机控制交通灯的技巧。
同时,我也加深了对电子元器件和电路原理的理解和掌握。
这些知识将对我今后的学习和工作产生积极影响。
然而,在实验过程中也遇到了一些问题。
比如,如果LED灯连接不正确或程序编写有误,交通灯可能无法正常运行。
因此,在进行单片机实验时,我们需要仔细检查电路连接和程序编写,确保一切正常。
总之,单片机交通灯实验是一次充满趣味和挑战的实践活动。
通过这次实验,我不仅学到了许多知识,而且培养了动手能力和实践能力。
希望将来能有更多这样的实验机会,继续提升自己的电子技术水平。
单片机(跑马灯,跑马灯,方波,交通灯)设计
《单片机应用设计报告》系别电子信息与电气工程系专业自动化班级 09 级 (1) 班姓名王杰王典老师储忠完成时间 2012年5月18日单片机原理及接口技术课程设计报告摘要:单片机是一种集成在电路芯片,是采用超大规模集成电路技术把具有数据处理能力的中央处理器CPU随机存储器RAM、只读存储器ROM、多种I/O口和中断系统、定时器/计时器等功能(可能还包括显示驱动电路、脉宽调制电路、模拟多路转换器、A/D转换器等电路)集成到一块硅片上构成的一个小而完善的计算机系统。
MCS-51单片机是使用极为广泛的一款8位单片机,在此次实训中所用的单片机是美国Atmel公司生产的以8031为内核的AT89S52单片机。
实训分别以构建单片机最小系统版、74HC138流水灯、8255交通灯、8253方波、6N137光耦控制继电器等几个实验关键词:AT89S52 74HC138 8255A 8253 6N137 交通灯目录单片机原理及接口技术课程设计报告 (1)实验一构建单片机最小系统和实验环境熟悉 (3)1.1单片机的工作原理 (3)1.1.1单片机最小系统图 (3)1.1.2运算器简介 (4)1.1.3控制器简介 (5)1.1.4实验解析与总结 (7)实验二跑马灯实验及74HC138译码器 (7)2.1实验内容 (7)2.1.1实验原理 (8)2.1.2实验原理图 (8)2.1.3实验程序流程图 (9)2.1.4实验程序代码 (9)2.1.5完成后的效果图 (10)2.2实验总结 (10)实验三8255控制交通灯实验 (11)3.1实验内容 (11)3.1.3实验原理 (11)3.1.2实验原理电路图 (12)3.1.3程序流程图 (13)3.1.4实验程序代码 (13)3.1.5系统实现图 (15)3.2 8255A寻址原理 (15)3.3实验总结 (16)实验四8253方波实验 (17)4.1实验内容 (17)4.1.1实验原理图 (17)4.1.2实验原理电路图 (17)4.1.3程序流程图 (18)4.1.4程序流程代码 (19)4.1.4系统仿真 (20)4.2实验总结 (21)实训总结 (21)附录 (22)1仿真系统电路原理图 (22)2硬件实物照片 (23)实验一构建单片机最小系统和实验环境熟悉1.1单片机的工作原理1.1.1单片机最小系统图单片机最小系统主要有外部晶振电路,系统复位电路以及供电电源组成。
单片机课程设计(交通灯程序)

单片机课程设计基于单片机的交通灯设计2007.07.05 一.设计目的:1、通过交通信号灯控制系统的设计,掌握8255A并行口传输数据的方法,以控制发光二极管的亮与灭;2、用8255作为输出口,控制十二个发光二极管熄灭,模拟交通灯管理.3、通过单片机课程设计,熟练掌握汇编语言的编程方法,将理论联系到实践中去,提高我们的动脑和动手的能力;4、完成控制系统的硬件设计、软件设计、仿真调试。
二.设计要求:交通信号灯模拟控制系统设计利用单片机的定时器定时,令十字路口的红绿灯交替点亮和熄灭,并且用LED数码管显示时间。
用8051做输出口,控制十二个发光二极管燃灭,模拟交通灯管理。
在一个交通十字路口有一条主干道(东西方向),一条从干道(南北方向),主干道的通行时间比从干道通行时间长,四个路口安装红,黄,蓝,灯各一盏;1、设计一个十字路口的交通灯控制电路,要求南北方向(主干道)车道和东西方向(支干道)车道两条交叉道路上的车辆交替运行,时间可设置修改。
2、在绿灯转为红灯时,要求黄灯先亮,才能变换运行车道3、黄灯亮时,要求每秒闪亮一次。
4、东西方向、南北方向车道除了有红、黄、绿灯指示外,每一种灯亮的时间都用显示器进行显示(采用计时的方法)。
5、同步设置人行横道红、绿灯指示。
三.设计任务和内容:任务:设计一个能够控制十二盏交通信号灯的模拟系统。
并且要求交通信号灯按照交通规则的模试来运行。
内容:因为本课程设计是交通灯的控制设计,所以要了解实际交通灯的变化情况和规律。
假设一个十字路口为东西南北走向。
初始状态0为东西红灯,南北红灯。
然后转状态1东西红灯,南北绿灯通车,。
过一段时间转状态2南北绿灯灭,黄灯闪烁几次,东西仍然红灯。
再转状态3,东西绿灯通车,南北红灯。
过一段时间转状态4,东西绿灯灭,闪几次黄灯,南北仍然红灯。
最后循环至状态1。
四.控制系统的总体要求:1.执行程序时,初始态为四个路口的红灯全亮之后;2.东西路口的绿灯亮,南北路口的红灯亮,东西路口方向通车;3.延时一段时间后,东西路口的绿灯熄灭,黄灯开始延时并且开始闪烁,闪烁5次后,东西路口红灯亮,而同时南北路口的绿灯亮,南北路口方向开始通车;4.延时一段时间之后,南北路口的绿灯熄灭,黄灯开始延时并且开始闪烁,闪烁3次之后,再切换到东西路口方向;之后重复2到4过程。
单片机内部结构测试报告-跑马灯

单片机内部结构测试报告姓名:苏汉生班别:09机械1班学号:0915020045指导老师:庞志目录1.跑马灯实验12.跑马灯实验23.跑马灯实验34.按键实验、蜂鸣器5.定时器数码管显示6.看门狗实验7.AD数模转换实验程序运行分析一、跑马灯实验11.测试程序名称:跑马灯实验12.程序功能介绍:跑马灯1的程序功能主要是控制LED灯闪亮的顺序,使八个LED灯按照程序设定闪亮。
但对按键和其他元件不起任何控制作用。
3.程序相关的电路图:8位流水灯电路4.程序总体(主函数)流程图:5(1)(3)1ms延时函数:(4)N ms掩饰函数:6.程序涉及的技术解析:unsigned charLED_table[]={0xFE,0x00,0xFF,0xFE,0xFD,0xFB,0xF7,0xEF,0xDF,0xBF ,0x7F,0xFF,0x00,0xFF,0x7F,0xBF,0xDF,0xEF,0xF7,0xFB,0xFD,0xFE,0 xFF,0x00,0xFF,0x7E,0xBD,0xDB,0xE7,0xFF,0x00,0xE7,0xDB,0xBD,0x7 E,0xFF,0x00};上述这个语句用到了一维数组,命名为LED_table,该数组一共有37个元素,每一个元素是一个十六进制的数,这些十六进制的数代表着开发板上的LED灯闪亮的规律(输出1为不亮,输出0为亮)。
PORTA = 0xFF;DDRA = 0xFF;DDRE=0XFF;PORTE=0XFF;上述语句是I/O口(端口A寄存器)的初始化,A口的8个脚控制开发板上的8个LED灯。
初始化A口设置为输出,8个引脚分别为1111 1111,LED等为全灭的状态。
单片机与LED灯之间连接了一个74HC573八进制3态非反转透明锁存器,E口2脚接在74HC573锁存器的使能端。
当锁存使能端为高电平1时,锁存对于数据是透明的(也就是说输出同步);当锁存使能端为低电平0时,符合建立时间和保持时间的数据会被锁存。
单片机交通灯实验报告
单片机交通灯实验报告交通灯是城市交通管理的重要组成部分,它能够规范车辆和行人的通行秩序,保障交通安全。
为了进一步学习交通灯的原理和掌握其设计,我们进行了一次单片机交通灯实验。
本次实验使用单片机和几个LED灯,通过对单片机的编程控制来实现交通灯的自动切换。
下面是我对该实验进行的详细记录和分析。
首先,我们需要连接电路。
我们采用的是STC89C52单片机,使用3个LED灯来模拟红灯、黄灯和绿灯。
利用杜邦线将LED灯连接到单片机的GPIO口,另外还需要连接一个电位器到单片机的模拟口,用来控制红灯亮灭的时间。
接下来,我们进行了单片机的编程。
我们使用C语言编写程序,利用单片机提供的GPIO口控制LED灯的亮灭,从而实现交通灯的控制。
我们通过控制红灯、黄灯和绿灯的亮灭时间,模拟真实交通灯的工作。
在编写程序的过程中,我们首先做了一些准备工作。
我们初始化了单片机的GPIO口,设定了红灯、黄灯和绿灯的引脚。
然后,我们使用一个循环语句不断地进行交通灯的切换。
具体来说,我们将交通灯控制划分为红灯、绿灯和黄灯三个状态,利用if-else语句对不同状态进行判断并进行相应的控制。
通过对红灯亮灭时间的控制,我们能够实现交通灯的自动切换。
在程序设计的过程中,我们还考虑了交通灯的变化时间。
我们在红灯和绿灯之间设置了一个黄灯过渡时间,以模拟真实交通灯的工作。
同时,我们还设置了一个迟滞时间,使得每个状态之间的切换更加顺滑。
通过这次实验,我们进一步了解了交通灯的工作原理和掌握了单片机的编程技巧。
通过对交通灯的模拟,我们成功地实现了交通灯的自动切换。
总结起来,这次实验不仅提高了我们对交通灯的认识,还锻炼了我们的动手能力和创新思维。
在今后的学习和工作中,我们将继续学以致用,将所学的知识应用到实际问题中。
让我们共同努力,为交通安全做出贡献。
单片机跑马灯实验报告
单片机跑马灯实验报告摘要:本实验通过使用单片机来控制LED灯进行跑马灯效果的展示。
通过简单的电路连接和编程,我们成功实现了单片机跑马灯的功能。
实验结果表明,单片机跑马灯是一种简单而有效的显示系统,可广泛应用于娱乐和装饰等领域。
引言:跑马灯效果是一种常见且受欢迎的LED显示效果,它可以不断地循环显示LED灯的亮灭轮廓,给人们带来视觉上的愉悦。
单片机是一种可编程的微控制器,广泛应用于电子系统的控制和管理。
在本实验中,我们将利用单片机来实现跑马灯效果,通过编程控制LED灯的亮灭来模拟跑马灯的效果。
材料和方法:本实验所需材料如下:1. 单片机开发板2. LED灯3. 面包板4. 连接线实验步骤:1. 将单片机开发板放置在面包板上,确保连接稳固。
2. 将LED灯连接到面包板上,按照电路图正确连接。
3. 接通电源,将USB线连接到单片机开发板上。
4. 在计算机上打开开发板的编程软件。
5. 编写程序代码,实现跑马灯的效果。
6. 将程序代码下载到单片机开发板中。
7. 观察LED灯的亮灭情况,检查是否实现了跑马灯效果。
结果和讨论:经过实验,我们成功实现了单片机跑马灯的效果。
LED灯按照指定的顺序循环亮灭,产生出跑马灯的效果。
通过调整程序代码,我们可以控制跑马灯的速度和亮灭顺序,使其更加多样化和有趣。
单片机跑马灯是一种简单而有效的LED显示系统。
它可以应用于各种场景,包括室内和室外的装饰灯,新闻标语显示,广告牌等。
跑马灯效果不仅能够吸引人们的目光,还可以起到一定的宣传和广告效果。
总结:通过本次实验,我们了解了单片机的基本原理和应用,并成功实现了单片机跑马灯的效果。
单片机跑马灯具有简单、低成本、可编程等优点,适用于各种需要循环显示效果的场景。
未来,我们可以探索更多有趣的跑马灯效果,并将其应用于实际项目中。
在这个数字化时代,单片机跑马灯有着广阔的应用前景,希望能够为人们的生活和工作带来更多的灵感和乐趣。
单片机实验4(交通灯)
#0 #0 DELAY2 DELAY1 DELAY
;东西方向红灯亮 ;长延时
;南北方向绿灯闪4次 ; ;短延时
;南北方向绿灯灭 ;南北方向黄灯亮 ;延时
;南北方向黄灯灭 ;南北方向红灯亮 ;东西方向红灯灭 ;东西方向绿灯亮 ;长延时
;东西方向绿灯闪4次
;短延时
;东西方向绿灯灭 ;东西方向黄灯亮 ;延时
for(i=0; i<8; i++)
{
sg=~sg;
delay(0x2);
}
sy=1;
sr=0;
sg=0;
er=1;
/*南北红灯*/ /*南北黄灯*/ /*南北绿灯*/ /*东西红灯*/ /*东西黄灯*/ /*东西绿灯*/ /*延时函数*/
/*状态1,南北绿灯,东西红灯*/
/*长延时*/ /*状态2,南北绿灯闪转黄灯,东西红灯*/
ER R3, DELAY R4, SG R3, DELAY R4, SG SY R3, DELAY SY SR ER EG R3, DELAY R4, EG R3, DELAY R4, EG EY R3, DELAY ST1 R1, R0, R0, R1, R3,
#80 #8 #2 ST2
#20
#80 #8 #2 LP
绿灯*/
/*状态4,南北红灯,东西绿灯闪转黄灯*/
/*主程序*/ /*循环依次调用各状态函数*/
/*短延时*/
ey=0; eg=0; delay(0x8); return; } void st3() { sr=1; sy=0; sg=0; eg=1; ey=0; er=0; delay(0x30); } void st4() { unsigned char i; sr=1; sy=0; sg=0; for(i=0; i<8; i++) { eg=~eg; delay(0x2); } ey=1; eg=0; er=0; delay(0x8); } main() { P1=0; for(;;) { st1(); st2(); st3();
单片机实训报告跑马灯

一、实训背景随着科技的发展,单片机作为一种重要的嵌入式系统控制单元,在工业控制、智能家居、物联网等领域得到了广泛的应用。
为了提高学生对单片机程序设计的理解和实践能力,本次实训选择了跑马灯程序设计作为实训项目。
二、实训目的1. 熟悉单片机的基本结构和编程方法。
2. 掌握Keil C51集成开发环境的使用。
3. 学习跑马灯程序的设计与实现。
4. 培养动手实践能力和团队协作精神。
三、实训内容本次实训主要分为以下几个部分:1. 电路设计:设计跑马灯的电路,包括单片机、LED灯、电阻、按键等元件。
2. 程序设计:编写跑马灯的程序,实现LED灯的正序、倒序、闪烁等功能。
3. 程序调试:在Keil C51集成开发环境中进行程序调试,确保程序正常运行。
4. 实验报告撰写:总结实训过程中的经验和收获,撰写实验报告。
四、电路设计跑马灯电路主要包括以下元件:1. 单片机:选用AT89C51单片机作为控制核心。
2. LED灯:使用8个LED灯作为显示元件。
3. 电阻:用于限流,防止LED灯烧毁。
4. 按键:用于控制跑马灯的运行模式。
电路连接方式如下:1. 将8个LED灯的正极依次连接到单片机的P1口。
2. 将8个LED灯的负极依次连接到地线。
3. 将按键的一端连接到单片机的P3.0口,另一端连接到地线。
五、程序设计跑马灯的程序采用C语言编写,主要功能包括:1. 正序跑马灯:LED灯依次点亮,从D1到D8。
2. 倒序跑马灯:LED灯依次点亮,从D8到D1。
3. 闪烁跑马灯:LED灯快速闪烁。
程序流程如下:1. 初始化单片机P1口为输出模式。
2. 根据按键输入选择跑马灯的运行模式。
3. 根据选择的模式,依次点亮LED灯。
4. 延时一段时间,然后继续点亮下一个LED灯。
5. 重复步骤3和4,直到所有LED灯点亮完毕。
程序代码如下:```c#include <reg51.h>#define LED P1void delay(unsigned int t) {unsigned int i, j;for (i = 0; i < t; i++)for (j = 0; j < 120; j++);}void main() {unsigned char i;LED = 0x01; // 正序跑马灯while (1) {for (i = 0; i < 8; i++) {delay(500); // 延时LED = (0x01 << i); // 点亮下一个LED灯}}}```六、程序调试在Keil C51集成开发环境中,将程序代码编译生成HEX文件,然后将HEX文件烧录到单片机中。
51单片机跑马灯程序编程高四位亮
51单片机跑马灯程序编程高四位亮51单片机是一种非常常用的微控制器,它具有强大的功能和广泛的应用领域。
跑马灯是一种非常简单且常见的程序,可以用来展示LED灯在一组灯中依次亮起的效果。
在51单片机中实现跑马灯程序,可以通过控制IO口的状态来控制LED的亮灭。
假设我们有8个LED灯,要实现高四位亮的跑马灯效果,可以按照以下步骤进行编程:1. 首先,需要定义8个IO口作为LED灯的控制口。
假设我们将P0口的高四位作为控制LED的口,可以通过以下代码进行定义:```sbit LED1 = P0^4;sbit LED2 = P0^5;sbit LED3 = P0^6;sbit LED4 = P0^7;```2. 在主函数中,需要设置IO口的工作模式。
由于我们要控制LED亮灭,需要将相应的IO口设置为输出模式,可以通过以下代码实现:```LED1 = LED2 = LED3 = LED4 = 0; // 初始化为低电平P0M0 = P0M1 = 0; // P0口设置为推挽输出模式```3. 接下来,可以编写一个循环来实现跑马灯效果。
在每一次循环中,将高四位中的一个LED口设置为高电平,其他的LED口设置为低电平,通过不断循环改变高四位LED口的状态,从而实现跑马灯效果。
可以通过以下代码实现:```while (1) {LED1 = 1; // 第一个LED口亮LED2 = 0; // 其他LED口灭LED3 = 0;LED4 = 0;Delay(500); // 延时一段时间,控制灯的亮灭速度LED1 = 0; // 第一个LED口灭LED2 = 1; // 第二个LED口亮LED3 = 0;LED4 = 0;Delay(500);// 依次类推...}```通过以上代码,就可以在51单片机上实现高四位亮的跑马灯效果。
通过改变循环中的延时时间,还可以调节灯的亮灭速度。
此外,还可以通过调节亮灭的顺序,改变跑马灯的效果,使其更加多样化。
单片机课程设计跑马灯的控制
单片机课程设计跑马灯的控制摘要:本设计选择对跑马灯的控制,先构思跑马灯实现预想效果,然后进行分析,根据要求编写程序,选择硬件端口,并进行调试致预想效果,最后浅谈课程设计的经历,以及总结。
目录一)课程设计的目的二)课程设计的要求三)流程图四)原理图五)程序语言六)总结七)参考资料设计题目:试设计一个闪烁跑马灯控制器,该控制器可以控制8个灯顺序亮灭。
当单片机上电后,8个灯依次从左向右亮,并且每个灯亮的时间为1秒钟。
这时,如果按钮K1按下,则灯亮的顺序是从右向左,同样,每个灯亮的时间是1秒钟。
这时,如果按下按钮K2,则此时,4个灯亮4个灯灭,延迟4秒钟以后,又开始从左向右点亮。
最后,若按下按钮K3,则全部灯亮。
此时若想再次点亮灯,必须重新上电。
题目分析:该题目要求控制8盏灯的亮灭,可使用单片机的P1.0到P1.8口来控制。
按钮K1用P3.4口,K2用P3.2口,及外部中断0,K3用P3.3口,及外部中断1,分别来实现。
单片机使用AT89C52,电源使用5V标准电源。
顺序亮灭使用外部中断源构成循环控制语句。
一、课程设计的目的课程设计是本专业集中实践环节的主要内容之一。
训练正确地应用单片机,培养解决工业控制、工业检测等领域具体问题的能力。
学生通过所做课题,熟悉单片机应用系统开发研制的过程,软硬件设计的工作方法、内容及步骤,对学生进行基本技能训练。
例如组成系统、编程、调试、绘图等。
使学生理论联系实际,提高动手能力和分析问题、解决问题的能力。
通过本课程设计,主要达到以下目的:1.使学生增进对单片机的感性认识,加深对单片机理论方面的理解。
2.使学生掌握单片机的内部功能模块的应用,如定时器/计数器、中断、片内外存贮器、I/O口、串行口通讯等。
3.使学生了解和掌握单片机应用系统的软/硬件设计过程、方法及实现,为以后设计和实现单片机应用系统打下良好基础。
二、课程设计的要求1.学生需认真阅读课程设计任务书,熟悉有关设计资料及参考资料,熟悉各种设计规范的有关内容,认真完成任务书规定的设计内容。
单片机实验报告 交通灯-14页精选文档

实验四交通灯实验一、实验目的1)按键、数码管、发光二极管综合应用编程技术2)定时中断技术3)按键中断技术二、实验实现的功能1)对每个路口(主干道、次干道)的绿灯时间,及黄灯时间的设定。
2)紧急按键功能,当按下该键时,所有路口变成红灯,相当于交警指挥特殊车辆通过。
再按该键,恢复正常显示。
三、系统硬件设计四、系统软件设计说明:1、红绿灯规则:绿变红时:绿灯亮→绿灯闪→绿灯灭黄灯亮→黄灯灭红灯亮;红变绿时:红灯亮→红灯黄灯同时亮→红灯黄灯同时灭绿灯亮;2、左边数1、2位数码管计左右灯时间,3、4位计上下灯时间;3、1键按下时进入设置红灯时间模式,同时计时停止;再次按下进入绿灯设置模式;再次按下退出设置模式,同时继续计时。
设置模式时2 键选中灯加,3键选中灯减。
4、按键4进入和退出紧急模式P1M1 EQU 91HP1M0 EQU 92HDX1 DATA 30H ;数码管个位显示DX2 DATA 31H ;数码管十位显示NB1 DATA 32H ;数码管百位显示NB2 DATA 33H ;数码管千位显示RE DATA 34H ;红灯亮时间,单位为秒GR DATA 35H ;绿灯亮时间,单位为秒YE DATA 36H ;黄灯亮时间,单位为秒NUM1 DATA 37H ;计算东西向亮灯时间参数NUM2 DATA 38H ;计算南北向亮灯时间参数DELAY_1 DATA 39H ;延时参数DELAY_2 DATA 40H ;延时参数KF1 DATA 41H ;按键标志位KF2 DATA 42H ;按键标志位KF3 DATA 43H ;按键标志位KF4 DATA 44H ;按键标志位ORG 0000HLJMP 0030HORG 001BH ;定时器1定时中断,记秒LJMP INTR0ORG 0030HMOV P1M1,#00000000BMOV P1M0,#11111111BMOV SP,#060H ;设置堆栈指针MOV RE,#025 ;红灯亮时间默认值25SMOV GR,#020 ;绿灯亮时间默认值20SMOV YE,#005 ;黄灯亮时间默认值5SMOV R1,#000 ;设置时间时暂停红绿灯MOV R2,#000 ;保存键值MOV R7,#000 ;记中断次数,R7=100为1秒MOV KF1,#000 ;初始化相关参数MOV KF2,#000MOV KF3,#000MOV KF4,#000MOV TMOD,#10H ;定时器初始化MOV TH1,#0D8H ;定时时间10msMOV TL1,#0F0HSETB ET1SETB TR1SETB EA ;开启总中断MAIN: LCALL LIGHT ;主程序/*********************************************************按键逻辑*********************************************************** *********/KY: MOV R1,#001 ;暂停计时CJNE R2,#000,KY0LJMP KY15KY0: CJNE R2,#004,KY1 ;紧急按键MOV R2,#000KY00: LCALL DP1 ;应急模式LCALL DP2LCALL LIGHT7CJNE R2,#004,KY00MOV R2,#000LJMP KY15AJMP KY00KY1: CJNE R2,#001,KY15 ;进入设置模式MOV R2,#000KY10: MOV NUM2,RELCALL COUNT2LCALL DP3LCALL LIGHT7CJNE R2,#001,KY11MOV R2,#000LJMP KY20KY11: CJNE R2,#002,KY12 ;红灯加MOV R2,#000INC REMOV A,RECJNE A,#100,KY12MOV RE,#000KY12: CJNE R2,#003,KY14 ;红灯减MOV R2,#000MOV A,RECJNE A,#000,KY13MOV RE,#099LJMP KY14KY13: DEC REKY14: AJMP KY10KY15: MOV R1,#000RETKY20: MOV NUM2,GR ;退出设置LCALL COUNT2LCALL DP3LCALL LIGHT8CJNE R2,#001,KY21MOV R2,#000LJMP KY3KY21: CJNE R2,#002,KY22 ;绿灯加MOV R2,#000INC GRMOV A,GRCJNE A,#100,KY22MOV GR,#000KY22: CJNE R2,#003,KY24 ;绿灯减MOV R2,#000MOV A,GRCJNE A,#000,KY23MOV GR,#099LJMP KY24KY23: DEC GRKY24: AJMP KY20KY3: MOV A,RE ;利用CJNE指令对CY位的影响来比较大小CJNE A,GR,KY31 ;处理最终设置结果AJMP BIGKY31: JC BIGAJMP SMALLSMALL: MOV A,RESUBB A,GRMOV YE,AAJMP KY4BIG: LJMP KY10 ;当绿灯时间小于等于红灯时间时重新设置KY4: MOV R1,#000RET/*******************************************************按键扫描及确定******************************************************* *********/KS: LCALL KS1LCALL KS2LCALL KS3LCALL KS4RETKS1: MOV A,KF1CJNE A,#001,KS12 ;按键标志位消抖SETB P0.5SETB P3.7JB P0.5,KS13MOV R2,#001MOV KF1,#000AJMP KS13KS12: SETB P0.5CLR P3.6SETB P3.7JNB P0.5,KS13MOV KF1,#001KS13: RETKS2: MOV A,KF2CJNE A,#001,KS22 ;按键标志位消抖SETB P0.6CLR P3.6SETB P3.7JB P0.6,KS23MOV R2,#002MOV KF2,#000AJMP KS23KS22: SETB P0.6CLR P3.6SETB P3.7JNB P0.6,KS23MOV KF2,#001KS23: RETKS3: MOV A,KF3CJNE A,#001,KS32 ;按键标志位消抖SETB P0.7CLR P3.6SETB P3.7JB P0.7,KS33MOV R2,#003MOV KF3,#000AJMP KS13KS32: SETB P0.7CLR P3.6JNB P0.7,KS33MOV KF3,#001KS33: RETKS4: MOV A,KF4CJNE A,#001,KS42 ;按键标志位消抖SETB P0.5CLR P3.7SETB P3.6JB P0.5,KS43MOV R2,#004MOV KF4,#000AJMP KS43KS42: SETB P0.5CLR P3.7SETB P3.6JNB P0.5,KS43MOV KF4,#001KS43: RET/**********************************************************红绿灯亮灯规则***************************************************** ********//*绿变红时:绿灯亮→绿灯闪→绿灯灭黄灯亮→黄灯灭红灯亮;红变绿时:红灯亮→红灯黄灯同时亮→红灯黄灯同时灭绿灯亮*/ LIGHT:LOOP0: MOV R5,GR ;东西向绿灯亮MOV R6,GRMOV R3,RE ;南北向红灯亮MOV R4,REMOV R0,YE ;保存原黄灯时间LOOP01: LCALL KYMOV NUM1,R6MOV NUM2,R4LCALL COUNT1LCALL COUNT2LCALL LIGHT1LCALL DP1LCALL DP2MOV A,R0XRL A,R6JNZ LOOP01LJMP LOOP1LOOP1: LCALL KYMOV NUM1,R6MOV NUM2,R4LCALL COUNT1 ;东西向绿灯闪,南北向红灯亮LCALL COUNT2LCALL LIGHT2LCALL DP1LCALL DP2MOV A,R0DEC AXRL A,R4JNZ LOOP1LJMP LOOP2LOOP2: MOV A,R0MOV R5,A ;东西向黄灯亮MOV R6,A ;南北向红黄灯亮MOV R3,#099MOV R4,#099LOOP21: LCALL KYMOV NUM1,R6MOV NUM2,R6LCALL COUNT1LCALL COUNT2LCALL LIGHT3LCALL DP1LCALL DP2MOV A,#099SUBB A,R0DEC AXRL A,R4JNZ LOOP21LJMP LOOP3LOOP3: MOV R5,RE ;东西向红灯亮MOV R6,REMOV R3,GR ;南北向绿灯亮MOV R4,GRMOV R0,YE ;保存原黄灯时间LOOP31: LCALL KYMOV NUM1,R6MOV NUM2,R4LCALL COUNT1LCALL COUNT2LCALL LIGHT4LCALL DP1LCALL DP2MOV A,R0XRL A,R4JNZ LOOP31LJMP LOOP4LOOP4: LCALL KYMOV NUM1,R6MOV NUM2,R4LCALL COUNT1 ;东西向绿灯闪,南北向红灯亮LCALL COUNT2LCALL LIGHT5LCALL DP1LCALL DP2MOV A,R0DEC AXRL A,R6JNZ LOOP4LJMP LOOP5LOOP5: MOV A,R0MOV R5,A ;东西向红黄灯亮MOV R6,A ;南北向黄灯亮MOV R3,#099MOV R4,#099LOOP51: LCALL KYMOV NUM1,R6MOV NUM2,R6LCALL COUNT1LCALL COUNT2LCALL LIGHT6LCALL DP1LCALL DP2MOV A,#099SUBB A,R0DEC AXRL A,R4JNZ LOOP51LCALL LOOP0/*******************************************************运行模式的红绿灯***************************************************** *********//**********东西向绿灯亮,南北向红灯亮**********/LIGHT1: MOV P2,#0EBHSETB P3.5CLR P3.4SETB P3.3CLR P3.2RET/**********东西向绿灯闪,南北向红灯亮*********/LIGHT2: CJNE R7,#050,LIGHT21LIGHT21: JNC LIGHT22LCALL LIGHT24AJMP LIGHT23LIGHT22: LCALL LIGHT25LIGHT23: RETLIGHT24: MOV P2,#0EBH ;东西向绿灯亮,南北向红灯亮SETB P3.5CLR P3.4SETB P3.3CLR P3.2RETLIGHT25: MOV P2,#0EFH ;东西向无灯亮,南北向红灯亮SETB P3.5CLR P3.4SETB P3.3SETB P3.2RET/*********东西向黄灯亮,南北向红黄灯亮*******/LIGHT3: MOV P2,#0A6HSETB P3.5CLR P3.4CLR P3.3SETB P3.2RET/*********东西向红灯亮,南北向绿灯亮**********/LIGHT4: MOV P2,#05DHCLR P3.5SETB P3.4SETB P3.3SETB P3.2RET/********东西向红黄灯亮,南北向绿灯闪*********/LIGHT5: CJNE R7,#050,LIGHT51LIGHT51: JNC LIGHT52LCALL LIGHT54AJMP LIGHT53LIGHT52: LCALL LIGHT55LIGHT53: RETLIGHT54: MOV P2,#05DH ;东西向红灯亮,南北向绿灯亮CLR P3.5SETB P3.4SETB P3.3SETB P3.2RETLIGHT55: MOV P2,#07DH ;东西向红灯亮,南北向无灯亮SETB P3.5SETB P3.4SETB P3.3SETB P3.2RET/********东西向红黄灯亮,南北向黄灯亮*********/LIGHT6: MOV P2,#034HSETB P3.5SETB P3.4CLR P3.3SETB P3.2RET/**********东西南北路口都变成红灯***********/LIGHT7: MOV P2,#06DHSETB P3.5CLR P3.4SETB P3.3SETB P3.2RET/*****东西南北路口都变成绿灯*****/LIGHT8: MOV P2,#0DBHCLR P3.5SETB P3.4SETB P3.3CLR P3.2RET/**************************************************中断服务程序*************************************************************** *******/INTR0: PUSH PSW ;原始时间分秒的确定PUSH AccLCALL KSMOV TH1,#0D8HMOV TL1,#0F0HINC R7CJNE R7,#100,INTR04MOV R7,#000HCJNE R1,#000,INTR04CJNE R6,#000,INTR01 ;倒计时MOV A,R5MOV R6,ALJMP INTR02INTR01: DEC R6INTR02: CJNE R4,#000,INTR03 ;倒计时MOV A,R3MOV R4,ALJMP INTR04INTR03: DEC R4INTR04: POP AccPOP PSWRETI/************************************************数码管各位显示计算*********************************************************** ********/COUNT1: MOV A,NUM1 ;计算东西向亮灯时间MOV B,#10DIV ABMOV DX2,AMOV DX1,BRETCOUNT2: MOV A,NUM2 ;计算南北向亮灯时间MOV B,#10DIV ABMOV NB2,AMOV NB1,BRET/*****************************************************数码管显示************************************************************* *********/DP1: MOV A,DX2 ;东西向两位数码管显示MOV DPTR,#TAB0MOVC A,@A+DPTRCLR P0.0MOV P1,ALCALL DL0MOV P1,#000HSETB P0.0MOV A,DX1MOV DPTR,#TAB1MOVC A,@A+DPTRCLR P0.1MOV P1,ALCALL DL0MOV P1,#000HSETB P0.1RETDP2: MOV A,NB2 ;南北向两位数码管显示MOV DPTR,#TAB0MOVC A,@A+DPTRCLR P0.2MOV P1,ALCALL DL0MOV P1,#000HSETB P0.2MOV A,NB1MOV DPTR,#TAB0MOVC A,@A+DPTRCLR P0.3MOV P1,ALCALL DL0MOV P1,#000HSETB P0.3RETDP3: CJNE R7,#050,DP31 ;设置模式时数码管显示模式DP31: JNC DP32LCALL DP2AJMP DP33DP32: LCALL DL0DP33: RET/************************************************************** *延时********************************************************** ********//*说明:延时所用的三条令,stc10f08xe中与常用的51单片机中的指令执行时间不同*/DL0: MOV DELAY_1,#16 ;延时时间:[2+(2+250*4+4)×16+4]/11.0592DL01: MOV DELAY_2,#250 ; =16102/11.0592 DJNZ DELAY_2,$ ; =1.456msDJNZ DELAY_1,DL01 ;RET ; ;TAB0: DB 03FH,006H,05BH,04FH,066H,06DH,07DH,007H,07FH,067H ;无小数点的LED字模表TAB1: DB 0BFH,086H,0DBH,0CFH,0E6H,0EDH,0FDH,087H,0FFH,0E7H ;有小数点的LED字模表END五、实验过程中遇到的问题及解决方法1、怎么将按键按描程序放入中断?改变用无延时的标志位按键扫描,然后在中断中调用。
单片机实验报告(交通灯)
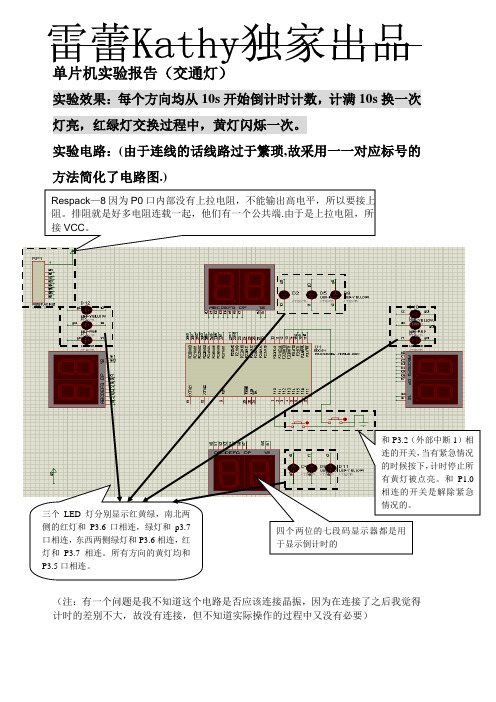
单片机实验报告(交通灯)实验效果:每个方向均从10s 开始倒计时计数,计满10s 换一次灯亮,红绿灯交换过程中,黄灯闪烁一次。
实验电路:(由于连线的话线路过于繁琐,故采用一一对应标号的方法简化了电路图.)(注:有一个问题是我不知道这个电路是否应该连接晶振,因为在连接了之后我觉得计时的差别不大,故没有连接,但不知道实际操作的过程中又没有必要)三个LED 灯分别显示红黄绿,南北两侧的红灯和P3.6口相连,绿灯和p3.7口相连,东西两侧绿灯和P3.6相连,红灯和P3.7相连。
所有方向的黄灯均和和P3.2(外部中断1)连的开关,当有紧急情况的时候按下,计时停止所有黄灯被点亮。
和P1.0相连的开关是解除紧急情况的。
四个两位的七段码显示器都是用于显示倒计时的程序效果展示:(黄灯闪烁)(红灯再次点亮进入倒计时)点解除紧急的按钮,红绿灯显示恢复正常状态实验总结:这是第一次做比较大一点的程序,做出来之后的心情还是比较激动的,因为之前根本没有想过自己可以做的出来。
先说说实验中遇到的问题和一些解决方法。
1. 第一个要解决的问题就是倒计时的问题,然后想到的就是应该吧七段码转换表倒置,这样显示的时间就可以是逆序的,其次由于表倒置了,所以计数的数值也要倒着来。
比如我想设定闹钟为10s ,则需要设置时间为09和08这样显示的闹钟时间才是10s2. 第二点问题就是,交通灯是一个循环的过程,其实我想用尽量少得语句达到这个循环的目的,于是我只用了两个口控制东西南北的红绿灯,用P3.6控制南北方向的红灯和东西方向的绿灯,P3.7控制南北方向的绿灯和东西方向的红灯,然后设置了一个R1作为变量没循环一次,R1加1,然后R1和2相除,得到的余数这是0或者1,这用余数加上cjnz 语句就可以起到循环的作用控制红绿灯的交替点亮,我觉得这样比较简单,而且用到的控制口比较少,比较方便。
3. 因为紧急按钮按下,应该是比较紧急的事情,所以我把紧急按钮按外部中断0的接口相连,由于外部中断0的中断优先级最高,所以当按钮一按下,程序自动调至中断程序执行。
单片机跑马灯实验报告(二)

单片机跑马灯实验报告(二)引言概述:单片机跑马灯实验是一种常见的数字电路实验,也是学习单片机基础应用的重要内容。
本实验旨在通过控制单片机的IO口输出来实现多个LED灯的顺序闪烁,从而模拟跑马灯的效果。
本报告将从硬件组成、电路连接、程序设计、实验步骤和实验结果等方面进行详细阐述。
正文:1. 硬件组成:- 单片机 (例如STC89C52)- 电源 (5V 直流电源)- 电阻 (用于限流)- LED灯 (多个,不同颜色)- 连接线等2. 电路连接:- 连接单片机的引脚与LED灯、电阻等。
一般使用IO口输出来控制LED灯的开关状态,通过改变输出电平来控制灯的亮灭。
具体的连接方式可以根据单片机的datasheet或者开发板的示意图来确定。
3. 程序设计:- 使用C语言编写程序,通过编写程序控制单片机的IO口输出来实现LED灯的顺序闪烁。
基本的程序框架包括引入头文件、定义引脚、设置IO口状态、延时函数和主函数等。
4. 实验步骤:- 硬件连接完毕后,将程序通过编译、烧录等操作下载到单片机中。
- 运行程序,观察LED灯按照设定的顺序是否闪烁,是否达到跑马灯的效果。
- 可以通过改变程序中的一些参数,如延时时间、顺序等,来观察结果的变化。
5. 实验结果:- 根据实验步骤操作后,观察实验效果是否与预期相符。
- 分析实验结果,检查是否有异常情况,如LED灯不亮、顺序错误等,进行排查和修改。
- 还可进行一些扩展实验,如控制节奏变化、增加LED灯数量等。
总结:通过本次实验,我们成功实现了单片机跑马灯的效果,掌握了基本的硬件连接和程序设计方法。
在实验过程中,我们深入了解了单片机的IO口控制和LED灯驱动原理等知识。
通过不断练习和实验,我们能够熟练掌握单片机应用开发的基础技能,为日后深入学习和应用打下了良好的基础。
单片机实例之跑马灯(二)2024
单片机实例之跑马灯(二)引言概述:本文主要介绍了单片机实例中的跑马灯(二)的设计和实现。
通过使用单片机控制LED灯的亮灭顺序和频率,展示出跑马灯效果。
文章将从硬件接口的连接、软件设计、电路调试、代码优化和总结五个大点来详细讲述整个跑马灯的实现过程。
正文内容:一、硬件接口的连接1. 连接LED灯和单片机的端口引脚2. 添加合适的电阻限流器3. 连接额外的电源供给(若需要)二、软件设计1. 初始化单片机的IO接口2. 设定LED灯的控制端口为输出3. 设定相应的延时时间和频率三、电路调试1. 检查单片机和LED灯的连接是否正确2. 使用示波器测量电压和电流波形3. 调整电阻的阻值以控制LED灯的亮度4. 检查电源稳定性和供电电压四、代码优化1. 使用更高效的延时函数2. 采用位操作方式控制LED灯的亮灭3. 增加循环计数变量,实现灯光的循环移动4. 将代码分块、模块化,提高可维护性和可扩展性五、总结通过对单片机跑马灯(二)的实现过程的介绍,我们了解了硬件接口连接、软件设计、电路调试和代码优化等关键步骤。
同时,我们还学习了如何使用单片机控制LED灯的亮灭顺序和亮度,并实现了跑马灯效果。
通过不断的优化和调试,我们可以进一步提高灯光效果和系统稳定性。
总结:本文通过引言概述、正文内容和总结的方式详细介绍了单片机实例中的跑马灯(二)的设计和实现过程。
通过硬件接口的连接、软件设计、电路调试、代码优化等关键步骤的说明,读者可以了解到如何实现跑马灯效果,并通过优化和调试提高系统的稳定性和效果。
希望本文对读者的学习和实践有所帮助。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于uVision2单片机集成开发环境与硬件平台完成程序的脱机运行。
四、实验原理图
图3.1跑马灯实验电路原理图
电路原理图如上图3.1所示,AT89S52的P1.0~P1.3控制4个发光二极管,发光二极管按照一定次序发光,相邻发光二极管的发光时间间隔可以通过定时器控制,还可以通过软件延时实现。
软件:Proteus ISIS单片机仿真环境,uVision2单片机集成开发环境
三、实验内容
编写一段程序,采用P1口作为控制端口,使与P1口相接的四个发光二极管(D1、D2、D3、D4)按照一定的方式点亮。如点亮方式为:先点亮D1,延时一段时间,再顺序点亮D2……D4,然后又是D4……D1,同时只能有一个灯亮;然后每隔一段时间一次使相邻两个灯亮,三个灯亮,四个灯亮,最后闪烁三次,接着循环变化。
{
P1=table[num];
delay(2000);
}
for(num=0;num<4;num++)//从左至右间隔两个依次闪烁
{
P1=table1[num];
delay(2000);
}
for(num=3;num>0;num--)//从左至右间隔两个依次闪烁
{P1=table1[num Nhomakorabea;delay(2000);
硬件原理图如上图3.2所示。由于发光二极管的导通电压为1.7V,所以在电源与二极管之间加一个电阻,目的是保护二极管;实验中利用定时计数器实现1S的定时,然后在此基础上实现所需要的定时时间。
五、软件流程图与参考源程序
软件设计思想:在编程时,我们一般把一个独立的功能设计成一个子程序或者说函数。对于不同的设计者而言,对软件功能的划分角度不同,对应的函数功能也存在差异。
五、软件流程图与参考程序
主程序流程图如下:
参考程序
#include<reg52.h>
#include<intrins.h>
#define uchar unsigned char
#define uint unsigned int
uchar aa,num,speed,flag;
uchar code table[]={0x0e,0x0d,0x0b,0x07};
实验
一、实验目的
进一步掌握Proteus ISIS和uVision2单片机集成开发环境的使用;
进一步掌握单片机内部定时/计数器的使用及编程方法以及中断处理程序的编写方法
掌握单片机的I/O口编程使用。
二、实验设备及器件
硬件:PC机,HNIST-1型单片机实验系统,USB下载线一根、连接线若干
软件:Proteus ISIS单片机仿真环境,uVision2单片机集成开发环境
一、实验目的
初步学会Proteus ISIS和uVision2单片机集成开发环境的使用;
初步掌握采用汇编语言与C语言开发单片机系统的程序结构;
掌握80C51单片机通用I/O口的使用;
掌握单片机内部定时/计数器的使用及编程方法以及中断处理程序的编写方法。
二、实验设备及器件
硬件:PC机,HNIST-1型单片机实验系统
TR0=1;
}
void main()
{
init();//调用初始化函数
while(1)
{
if(flag)
{
delay(2000);//调用延时函数
for(num=0;num<4;num++)//从左至右间隔一个依次闪烁
{
P1=table[num];
delay(2000);
}
for(num=3;num>0;num--)//从左至右间隔一个依次闪烁
在本实验中,I/O口作为输出口使用,如果把I/O口的某些口线作为输入口使用时,如何获得输入引脚状态?请举例说明。
在画软件流图时,各种不同形式方框意义是否相同?请举例示之。
请简要叙述中断服务程序功能并画出其流程图。
在采用I/O口作为输出口时要考虑哪些因素?如果负载变化,如何设计单片机与负载之间的接口电路?
}
for(num=0;num<6;num++)//两个,三个,四个跑马灯依次闪烁
{
P1=table2[num];
delay(2000);
}
for(num=0;num<5;num++)//闪烁5次
{
P1=0xff;//全暗
delay(2000);
P1=0X00;//全亮
delay(2000);}
speed=speed-3;//变速
for(y=200;y>0;y--);
}
void init()//条件初始化函数
{flag=0;
speed=10;//控制跑马灯流水速度
TMOD=0x01;//中断方式
TH0=(65535-50000)/256;
TL0=(65536-50000)%256;//初值
EA=1;//打开总中断
ET0=1;//打开外中断0
uchar code table1[]={0x0a,0x05,0x09,0x06};
uchar codetable2[]={0x0c,0x09,0x03,0x08,0x01,0x0e,0x0c,0x08,0x00};
void delay(uint z)//延时函数
{
uint x;
uchar y;
for(x=z;x>0;x--)
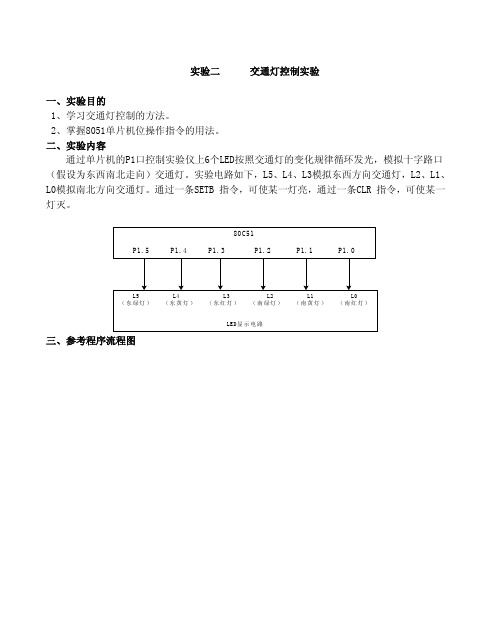
三、实验内容
编写一段程序,实现用单片机的I/O口控制12个发光二极管(四组,每组有红绿蓝三个发光二极管),使发光二极管按照一定的规则模拟交通灯功能。
基于Proteus ISIS仿真环境完成上述功能的仿真。
基于uVision2单片机集成开发环境与硬件平台完成程序的脱机运行。
四、实验原理
图3.2交通灯实验原理图
if(speed==4)
{speed=10;}
}
}
}
void timer0() interrupt 1//中断函数
{
TH0=(65535-50000)/256;
TL0=(65536-50000)%256;
aa++;
if(aa==speed)
{
aa=0;
flag=1;
}
}
六、实验思考题
请用汇编指令完成本实验内容,深刻理解汇编语言程序设计结构。
用单片机的IO口控制4组红绿蓝共12个发光二极管,使发光二极管按照一定规则与次序发光与闪亮以实现模拟交通灯的功能。假设初始状态为:(南北通行状态)南北绿灯、东西红灯(25s);后转为过度状态:南北黄灯、东西红灯(5s);再转为东西通行状态:东西绿灯、南北红灯25(s)。再转为过渡状态:东西黄灯、南北红灯(5s),然后循环往复。