Matching, linear systems, and the ball and beam
线性代数Linear Algebra总结

MATRICES· SOME DEFINITIONS
• Matrix: A rectangular array of numbers (named with capital letters) called entries with the size of the matrix described by the number of rows (horizontals) and columns (verticals); for example, a 3 by 4 matrix (3 X 4) has 3 rows and 4 columns;
o ~ 1 -2lFra bibliotek7 300 5 and this is a diagonal matrix 0 - 2 0 0 0 1
• Identity matrix (denoted by I): A square matrix with entries that are all' zeros except entries on the main diagonal, which must all equal the number one • Triangular matrix: A square matrix with all entries below the main diagonal equal to zero (upper triangular), or with all entries above the main diagonal equal to zero (lower triangular) • Equal matrices: Are the same size and have equal entries • Zero matrix: Every entry is the number zero • Scalar: A magnitude or a multiple • Row equivalent matrices: Can be produced through a sequence of row operations, such as: • Row interchange: Interchanging any 2 rows • Row scaling: Multiplying a row by any nonzero number • Row addition: Replacing a row with the sum of itself and any other row or multiple of that other row • Column equivalent matrices: Can be produced through a sequence of column operations, such as: • Column interchange: interchanging any 2 columns • Column scaling: multiplying a column by any nonzero number • Column addition: replacing a column with the sum of itself and any other column or multiple of that other column. • Elementary matrices: Square matrices that can be obtained from an identity matrix, I, of the same dimensions through a single row operation • The rank of matrix A, denoted rank(A), is the common dimension of the row space and column space of matrix A • The nullity of matrix A, denoted nullity(A), is the dimension of the nullspace of A
JBL Professional Control 25AV 音频扬声器说明书

I SERIESPoint Source 600IP6-1152/94MEDIUM POWER 15-INCH TWO-WAY 90° x 40° INSTALLATION LOUDSPEAKERCommunity strives to improve its products on a continual basis. Specifications are therefore subject to change without notice.*Rated continuous maximum input voltage at passive loudspeaker input may be higher than for directly connected transducers due to losses in the passive crossover. Voltages applied to the transducer terminals through the passive crossover shall always be the same or lower than the rated continuous voltagefor each device.FEATURES• Long excursion ferrite LF driver with FEA-optimized motor and symmetric movement suspension • 3-inch voice coil, 1.4” exit HF driver; hybrid titanium/polyimide diaphragm on low compression phase plug • Lightweight and compact with deep LF extension• Large rotatable waveguide with individually voiced crossover, single amp / biamp selectable • Innovative low profile modular bracket systems create elegant arrays with simplified installationAPPLICATIONSMAIN PA (Small to Medium Size Venues)Houses of Worship · Auditoriums · Restaurants Meeting Rooms · Theaters · Corporate A/V Systems DISTRIBUTED OR FILL (Larger Size Venues)Arenas · Stadiums · Night Clubs · TheatersThemed Entertainment · Larger Houses of WorshipDESCRIPTIONI SERIES Point Source 600 loudspeakers provide excellent acoustic performance, modular flexibility and elegant aesthetics for modern performance venues. Designed to support the goals of systems integrators and consultants both acoustically and mechanically, I SERIES includes a wide variety of arrayable, rotatable coverage patterns and a comprehensive selection of modular bracket systems that accelerate system design and system commissioning.FEA-optimized ferrite motors, mechanically mirrored suspension and advanced cooling system combine to provide linear performance with minimal power compression. The custom long-excursion LF driver delivers deep bass response and a detailed midrange at maximum SPL levels. The HF driver delivers excellent sound quality from a hybrid diaphragm of deep drawn titanium and resonance-absorbing polyimide, coupled to a patented low compression, low resonance phase plug for very low distortion performance with abundant headroom.The rotatable 13-inch (330mm) HF waveguide provides well-defined coverage and a smooth off-axis response that enhances arrayability. Individually voiced crossovers produce proper beamwidth matching transitions and identical sonic signatures, permitting horn patterns to be mixed throughout an installation. Additionally, user selectable single-amp or biamp operating modes expand application flexibility.I SERIESPoint Source 600IP6-1152/94MEDIUM POWER 15-INCH TWO-WAY90° x 40° INSTALLATION LOUDSPEAKERI SERIES Point Source 600IP6-1152/94MEDIUM POWER 15-INCH TWO-WAY 90° x 40° INSTALLATION LOUDSPEAKERHORIZONTAL POLAR DATA (30dB Scale, 6dB per major division)VERTICAL POLAR DATA (30dB Scale, 6dB per major division)-6— 100 Hz — 125 Hz — 160 Hz — 200 Hz-90° right 45°135°90° left-45°-135°0°front180°back — 250 Hz — 315 Hz — 400 Hz — 500 Hz— 630 Hz — 800 Hz — 1000 Hz — 1250 Hz-90° right 45°135°90° left-45°-135°0°front 180°back-90° right 45°135°90° left-45°-135°0°front180°back — 10000 Hz — 12500 Hz — 16000 Hz-90° right45°135°90° left-45°-135°0°front180°back — 4000 Hz — 5000 Hz — 6300 Hz — 8000 Hz-90° right45°135°90° left-45°-135°0°front 180°back — 1600 Hz — 2000 Hz — 2500 Hz — 3150 Hz-90° right45°135°90° left-45°-135°0°front 180°back -6— 100 Hz — 125 Hz — 160 Hz — 200 Hz-90° down 45°135°90° up-45°-135°0°front180°back — 250 Hz — 315 Hz — 400 Hz — 500 Hz— 630 Hz — 800 Hz — 1000 Hz — 1250 Hz-90° down 45°135°90° up-45°-135°0°front 180°back-90° down 45°135°90° up-45°-135°0°front180°back — 10000 Hz — 12500 Hz — 16000 Hz-90° down45°135°90° up-45°-135°0°front180°back — 4000 Hz — 5000 Hz — 6300 Hz — 8000 Hz-90° down45°135°90° up-45°-135°0°front 180°back — 1600 Hz — 2000 Hz — 2500 Hz — 3150 Hz-90° down45°135°90° up-45°-135°0°front 180°backI SERIES Point Source 600IP6-1152/94MEDIUM POWER 15-INCH TWO-WAY90° x 40° INSTALLATION LOUDSPEAKERCommunity Professional Loudspeakers333 East Fifth Street, Chester, PA 19013-4511 USA Phone (610) 876-3400 • Fax (610) •*********************CAUTION: Installation of loudspeaker s should only be performed by trained and qualified personnel. It is strongly r ecommended that a licensed and cer tified pr ofessional structural engineer approve the mounting design.IP6-1152/94 [07JUN2016]I SERIESPoint Source 600IP6-1152/94MEDIUM POWER 15-INCH TWO-WAY 90° x 40° INSTALLATION LOUDSPEAKERNOTESTwo-way single ampTwo-way biampTwo-way input panel1. PERFORMANCE SPECIFICATIONS All measurements are taken indoor using a time-windowed and processed signal to eliminate room effects, approximating ananechoic environment, a distance of 6.0 m. All acoustic specifications are rounded to the nearest whole number. An external DSP with settings provided by Community Professional Loudspeakers is required to achieve the specified performance; further performance gains can be realized using Community’s dSPEC226 loudspeaker processor with FIR power response optimization.2. OPERATING RANGE The frequency range in which the on-axis processed response remains within 10dB of the average SPL.3. CONTINUOUS POWER HANDLING Maximum continuous input voltage (and the equivalent power rating, in watts, at the stated nominal impedance) that the system can withstand, without damage, for a period of 2 hours using an EIA-426-B defined spectrum; with recommended signal processing and protection filters. 4. NOMINAL SENSITIVITY Averaged SPL over the operating range with an input voltage that would produce 1 Watt at the nominal impedance and the averaged SPL over the operating range with a fixed input voltage of 2.83V, respectively; swept sine wave axial measurements with no external processing applied in whole space, except where indicated.5. NOMINAL MAXIMUM SPL Calculated based on nominal / peak power handling, respectively, and nominal sensitivity; exclusive of power compression.6. EQUALIZED SENSITIVITY The respective SPL levels produced when an EIA-426-B signal is applied to the equalized loudspeaker system at a level which produces a total power of 1 Watt , in sum, to the loudspeaker subsections and also at a level which produces a total voltage, in sum, of 2.83V to the loudspeaker subsections, respectively; each referenced to a distance of 1 meter.7. EQUALIZED MAXIMUM SPL The SPL produced when an EIA-426-B signal is applied to the equalized loudspeaker system, at a level which drives at least one subsection to its rated continuous input voltage limit, referenced to a distance of 1 meter. The peak SPL represents the 2:1 (6dB) crest factor of the EIA-426-B test signal.8. AXIAL PROCESSED RESPONSE The on-axis variation in acoustic output level with frequency of the complete loudspeaker system with recommended signal processing applied. 1/6 octave Gaussian smoothing applied.9. AXIAL SENSITIVITY The on-axis variation in acoustic output level with frequency for a 1 Watt swept sine wave, referenced to 1 meter with no signal processing. 1/6 octave Gaussian smoothing applied.10. HORIZONTAL / VERTICAL OFF-AXIS RESPONSES The loudspeaker’s magnitude response at various angles off-axis, with recommended signal processing applied in the operating mode which utilizes the largest number of individually amplified pass bands. 1/6 octave Gaussian smoothing applied.11. DIRECTIVITY INDEX The ratio of the on-axis SPLsquared to the mean squared SPL at the same distance for all points within the measurement sphere for each given frequency; expressed in dB. 1/6 octave Gaussian smoothing applied.12. BEAMWIDTH The angle between the -6dB points in the polar response of the loudspeaker when driven in the operating mode which utilizes the largest number of individually amplified pass bands. 1/6 octave Gaussian smoothing applied.Data presented on this spec sheet represents a selection of the basic performance specifications for the model. These specifications are intended to allow the user to perform a fair, straightforward evaluation and comparison with other loudspeaker spec sheets. For a detailed analysis of this loudspeaker’s performance, please download the GLL file and/or the CLF file from our website: .。
Linear system theory and design
3.
The concept of physical model
A physical description of the physical system
4.
The concept of mathematical model
A mathematical description of physical model
8
Linear system theory and design
Question:
1. The concept of system The entities, the interactions between the entities and the
boundary
2. The concept of physical system the entities in the system is what exist in our real world
Linear system theory and design
胡德文 教授 刘亚东 讲师
1
Linear system theory and design
课程简介
本课程是一门信息科学的专业基础课程, 阐述分析和综合线性多变量系统的理论、方法 和工程上的实用性,本理论在控制技术、计算 方法和信号处理等领域有着广泛的应用。目的 使学生掌握其基本概念、方法和结论,为进一 步 研 究 系 统 理 论 打 下 基 础 。 学习本课程之前应具备线性代数等知识。
课程内容
讲课
2 4 4 6 4 6 3 7 2 36
7
Linear system theory and design
Chapter One
Section one: Introduction
清华大学本科计算机课程介绍

课号:00240013 学分: 3 课程名称 中文 课程属性:全校任选 英文 开课学期:秋、春 Fundamentals of Computer-aided Design 出版社 清华大学出版社 出版年月 2002 年 8 月
计算机辅助设计技术基础 书名 作者
使用教材
计算机辅助设计技术基 础教程
本课程是计算机科学与技术系为全校本科生开设的一门重要的计算机专业基础 课,目的是培养学生的软件工程素质,提高学生的软件开发能力。 本课程以软件生命周期的主要活动为主线,从软件及软件工程的历史和发展、软 件开发过程、需求分析、软件设计、程序编码、软件测试、软件维护、软件项目管理、 标准及规范等方面全面介绍软件工程的基本理论、方法、技术和工具。
课号: 30240273 课程名称
学分: 3 中文
课程属性:本科必修 开课学期: 春季 数据结构 书名 作者 英文 Data Structure 出版社 出版年月 1997
使用教材 参考书 讲课对象 课 程 简 介
数据结构(C 语言版)
严蔚敏,吴伟民 清华大学出版社
[1] Kruse, et.al. Data Structures & Program Desing in C. [2] Knuth. The Art of Computer Programming. Volume 1. 本科生 适用专业 工业工程系 先修课 C 语言程序设计
This course focuses on the basic concepts, principles, algorithms and applications of computer-aided design(CAD), it mainly consists of the following topics: software and hardware system of CAD, two-dimensional transformations, line clipping, raster display of 2D graphics, curves Introduction and surfaces, solid modeling, three-dimensional transformations, three-dimensional viewing, visible-surface determination, basic illumination models, and introductions to AutoCAD, 3DMAX 5.0 and OpenGL. It is an ideal choice for students who want to learn the rudiments of this dynamic and exciting CAD technology. 姓 名 讲 课 教 师 职称 主要教学和科研领域 主要教学领域: (1)承担全校计算机辅助设计技术基础 课教学; (2)承担研究生的小波分析及其应用课教学; 主要研究领域:小波分析及其应用,科学计算可视化, 计算机图形学,几何造型和图象处理。 (1)承担全校计算机辅助设计技术基础课教学
信源与天线的相对方向英语
信源与天线的相对方向英语Relative Orientation of Source and Antenna.In the field of wireless communication, the relative orientation between the transmitting antenna and the receiving antenna plays a crucial role in determining the signal strength and quality. Understanding the impact of relative orientation is essential for optimizing communication systems and achieving reliable data transmission.Polarization.Polarization refers to the orientation of the electric field vector of an electromagnetic wave. Linear polarization occurs when the electric field vector oscillates in a straight line, while circular polarization occurs when the electric field vector rotates in a circle.The relative orientation of the transmitting andreceiving antennas with respect to polarization is critical. If the antennas are not aligned in terms of polarization, the signal strength will be significantly reduced or even completely canceled out. Therefore, it is important to use antennas with matching polarization to ensure optimalsignal transmission and reception.Horizontal and Vertical Polarization.In many communication systems, horizontal and vertical polarization are commonly used. Horizontal polarization occurs when the electric field vector is parallel to the ground, while vertical polarization occurs when theelectric field vector is perpendicular to the ground.The choice of polarization depends on various factors, such as the environment, terrain, and intended application. For example, horizontal polarization is often preferred for long-distance communication over land, while vertical polarization is suitable for communication in urban areas with tall buildings and reflective surfaces.Beamwidth and Directivity.The beamwidth of an antenna describes the angular range over which it can effectively transmit or receive signals. The directivity of an antenna is a measure of how concentrated the transmitted or received signal is in a particular direction.The relative orientation of the source and antenna with respect to beamwidth and directivity is crucial for achieving focused signal transmission and reception. If the source is located outside the beamwidth of the antenna, the signal strength will be weak or non-existent. Similarly, if the antenna is not pointed towards the source, the directivity of the antenna will be reduced, resulting in lower signal strength.Line-of-Sight Communication.Line-of-sight (LOS) communication refers to a scenario where there is a clear and unobstructed path between the transmitting and receiving antennas. In LOS communication,the relative orientation of the antennas is less critical, as the signal can travel directly from the source to the destination.However, in non-line-of-sight (NLOS) communication, where obstacles or reflections interfere with the signal path, the relative orientation of the antennas becomes more important. Proper antenna alignment can help minimize signal loss and improve communication reliability in NLOS environments.Antenna Gain and Path Loss.Antenna gain is a measure of the ability of an antenna to amplify or focus the transmitted or received signal in a particular direction. Path loss refers to the attenuation of the signal as it travels through the medium.The relative orientation of the source and antenna impacts both antenna gain and path loss. When the antennas are aligned optimally, the antenna gain is maximized, and path loss is minimized. This results in a stronger and morereliable signal. Conversely, misalignment between the antennas can lead to reduced antenna gain and increased path loss, degrading the signal quality.Conclusion.The relative orientation of the source and antenna is a fundamental factor that influences the performance of wireless communication systems. Understanding theprinciples of polarization, beamwidth, directivity, and their impact on signal strength and quality is crucial for designing and deploying effective communication networks. By carefully considering the relative orientation of the antennas, engineers can optimize signal transmission and reception, ensuring reliable and efficient data transfer in a wide range of scenarios.。
linearsyetems全系列参数查询替换对照表

2
Junction Field Effect Transistors
Monolithic Dual Amplifiers
N Channel
P/N en ∆VGS BVGSS V min IDSS IGSS gfs µS min PKG. nV/√Hz mV max max mA pA min max
F4,F7 F4,F7 F4,F7
HIGH FREQUENCY
2N/PN/SST4416 2N/PN/SST4416A J/SST210 J/SST211 J/SST212 J/SST/U308 J/SST/U309 J/SST/U310 6 6 10 10 10 6 6 6 -6.0 -6.0 -3.0 -4.5 -6.0 -6.5 -4.0 -6.5 -30 -35 -25 -25 -25 -25 -25 -25 5 -100 4500 5 -100 4500 2 -100 4000 7 -100 6000 15 -100 7000 12 -1000 8000 12 -1000 10000 24 -1000 8000
Selection Guide and Cross Reference
Linear Integrated Systems
SMALL SIGNAL DISCRETE SEMICONDUCTORS
JFETs
DMOS Switches
BJTs
MOSFETs
Linear Integrated Systems
F3,F6,F7 F3,F6,F7 F4,F7 F4,F7 F4,F7 F1,F4,F7 F1,F4,F7 F1,F4,F7
HIGH FREQUENCY
2N/SST5911 2N/SST5912 2N/SST5912C U/SST440 U/SST441 20 20 20 20 20 10 15 40 10 20 -25 -25 -25 -25 -25 7 7 7 6 6 -50 -50 -50 4000 4000 4000
IEEE参考文献格式

•Creating a reference list or bibliographyA numbered list of references must be provided at the end of thepaper. The list should be arranged in the order of citation in the text of the assignment or essay, not in alphabetical order. List only one reference per reference number. Footnotes or otherinformation that are not part of the referencing format should not be included in the reference list.The following examples demonstrate the format for a variety of types of references. Included are some examples of citing electronic documents. Such items come in many forms, so only some examples have been listed here.Print DocumentsBooksNote: Every (important) word in the title of a book or conference must be capitalised. Only the first word of a subtitle should be capitalised. Capitalise the "v" in Volume for a book title.Punctuation goes inside the quotation marks.Standard formatSingle author[1] W.-K. Chen, Linear Networks and Systems. Belmont, CA: Wadsworth,1993, pp. 123-135.[2] S. M. Hemmington, Soft Science. Saskatoon: University ofSaskatchewan Press, 1997.Edited work[3] D. Sarunyagate, Ed., Lasers. New York: McGraw-Hill, 1996.Later edition[4] K. Schwalbe, Information Technology Project Management, 3rd ed.Boston: Course Technology, 2004.[5] M. N. DeMers, Fundamentals of Geographic Information Systems,3rd ed. New York : John Wiley, 2005.More than one author[6] T. Jordan and P. A. Taylor, Hacktivism and Cyberwars: Rebelswith a cause? London: Routledge, 2004.[7] U. J. Gelinas, Jr., S. G. Sutton, and J. Fedorowicz, Businessprocesses and information technology. Cincinnati:South-Western/Thomson Learning, 2004.Three or more authorsNote: The names of all authors should be given in the references unless the number of authors is greater than six. If there are more than six authors, you may use et al. after the name of the first author.[8] R. Hayes, G. Pisano, D. Upton, and S. Wheelwright, Operations,Strategy, and Technology: Pursuing the competitive edge.Hoboken, NJ : Wiley, 2005.Series[9] M. Bell, et al., Universities Online: A survey of onlineeducation and services in Australia, Occasional Paper Series 02-A. Canberra: Department of Education, Science andTraining, 2002.Corporate author (ie: a company or organisation)[10] World Bank, Information and Communication Technologies: AWorld Bank group strategy. Washington, DC : World Bank, 2002.Conference (complete conference proceedings)[11] T. J. van Weert and R. K. Munro, Eds., Informatics and theDigital Society: Social, ethical and cognitive issues: IFIP TC3/WG3.1&3.2 Open Conference on Social, Ethical andCognitive Issues of Informatics and ICT, July 22-26, 2002, Dortmund, Germany. Boston: Kluwer Academic, 2003.Government publication[12] Australia. Attorney-Generals Department. Digital AgendaReview, 4 Vols. Canberra: Attorney- General's Department,2003.Manual[13] Bell Telephone Laboratories Technical Staff, TransmissionSystem for Communications, Bell Telephone Laboratories,1995.Catalogue[14] Catalog No. MWM-1, Microwave Components, M. W. Microwave Corp.,Brooklyn, NY.Application notes[15] Hewlett-Packard, Appl. Note 935, pp. 25-29.Note:Titles of unpublished works are not italicised or capitalised. Capitalise only the first word of a paper or thesis.Technical report[16] K. E. Elliott and C.M. Greene, "A local adaptive protocol,"Argonne National Laboratory, Argonne, France, Tech. Rep.916-1010-BB, 1997.Patent / Standard[17] K. Kimura and A. Lipeles, "Fuzzy controller component, " U.S. Patent 14,860,040, December 14, 1996.Papers presented at conferences (unpublished)[18] H. A. Nimr, "Defuzzification of the outputs of fuzzycontrollers," presented at 5th International Conference onFuzzy Systems, Cairo, Egypt, 1996.Thesis or dissertation[19] H. Zhang, "Delay-insensitive networks," M.S. thesis,University of Waterloo, Waterloo, ON, Canada, 1997.[20] M. W. Dixon, "Application of neural networks to solve therouting problem in communication networks," Ph.D.dissertation, Murdoch University, Murdoch, WA, Australia, 1999.Parts of a BookNote: These examples are for chapters or parts of edited works in which the chapters or parts have individual title and author/s, but are included in collections or textbooks edited by others. If the editors of a work are also the authors of all of the included chapters then it should be cited as a whole book using the examples given above (Books).Capitalise only the first word of a paper or book chapter.Single chapter from an edited work[1] A. Rezi and M. Allam, "Techniques in array processing by meansof transformations, " in Control and Dynamic Systems, Vol.69, Multidemsional Systems, C. T. Leondes, Ed. San Diego: Academic Press, 1995, pp. 133-180.[2] G. O. Young, "Synthetic structure of industrial plastics," inPlastics, 2nd ed., vol. 3, J. Peters, Ed. New York:McGraw-Hill, 1964, pp. 15-64.Conference or seminar paper (one paper from a published conference proceedings)[3] N. Osifchin and G. Vau, "Power considerations for themodernization of telecommunications in Central and Eastern European and former Soviet Union (CEE/FSU) countries," in Second International Telecommunications Energy SpecialConference, 1997, pp. 9-16.[4] S. Al Kuran, "The prospects for GaAs MESFET technology in dc-acvoltage conversion," in Proceedings of the Fourth AnnualPortable Design Conference, 1997, pp. 137-142.Article in an encyclopaedia, signed[5] O. B. R. Strimpel, "Computer graphics," in McGraw-HillEncyclopedia of Science and Technology, 8th ed., Vol. 4. New York: McGraw-Hill, 1997, pp. 279-283.Study Guides and Unit ReadersNote: You should not cite from Unit Readers, Study Guides, or lecture notes, but where possible you should go to the original source of the information. If you do need to cite articles from the Unit Reader, treat the Reader articles as if they were book or journal articles. In the reference list or bibliography use the bibliographical details as quoted in the Reader and refer to the page numbers from the Reader, not the original page numbers (unless you have independently consulted the original).[6] L. Vertelney, M. Arent, and H. Lieberman, "Two disciplines insearch of an interface: Reflections on a design problem," in The Art of Human-Computer Interface Design, B. Laurel, Ed.Reading, MA: Addison-Wesley, 1990. Reprinted inHuman-Computer Interaction (ICT 235) Readings and Lecture Notes, Vol. 1. Murdoch: Murdoch University, 2005, pp. 32-37. Journal ArticlesNote: Capitalise only the first word of an article title, except for proper nouns or acronyms. Every (important) word in the title of a journal must be capitalised. Do not capitalise the "v" in volume for a journal article.You must either spell out the entire name of each journal that you reference or use accepted abbreviations. You must consistently do one or the other. Staff at the Reference Desk can suggest sources of accepted journal abbreviations.You may spell out words such as volume or December, but you must either spell out all such occurrences or abbreviate all. You do not need to abbreviate March, April, May, June or July.To indicate a page range use pp. 111-222. If you refer to only one page, use only p. 111.Standard formatJournal articles[1] E. P. Wigner, "Theory of traveling wave optical laser," Phys.Rev., vol. 134, pp. A635-A646, Dec. 1965.[2] J. U. Duncombe, "Infrared navigation - Part I: An assessmentof feasability," IEEE Trans. Electron. Devices, vol. ED-11, pp. 34-39, Jan. 1959.[3] G. Liu, K. Y. Lee, and H. F. Jordan, "TDM and TWDM de Bruijnnetworks and shufflenets for optical communications," IEEE Trans. Comp., vol. 46, pp. 695-701, June 1997.OR[4] J. R. Beveridge and E. M. Riseman, "How easy is matching 2D linemodels using local search?" IEEE Transactions on PatternAnalysis and Machine Intelligence, vol. 19, pp. 564-579, June 1997.[5] I. S. Qamber, "Flow graph development method," MicroelectronicsReliability, vol. 33, no. 9, pp. 1387-1395, Dec. 1993.[6] E. H. Miller, "A note on reflector arrays," IEEE Transactionson Antennas and Propagation, to be published.Electronic documentsNote:When you cite an electronic source try to describe it in the same way you would describe a similar printed publication. If possible, give sufficient information for your readers to retrieve the source themselves.If only the first page number is given, a plus sign indicates following pages, eg. 26+. If page numbers are not given, use paragraph or other section numbers if you need to be specific. An electronic source may not always contain clear author or publisher details.The access information will usually be just the URL of the source. As well as a publication/revision date (if there is one), the date of access is included since an electronic source may change between the time you cite it and the time it is accessed by a reader.E-BooksStandard format[1] L. Bass, P. Clements, and R. Kazman. Software Architecture inPractice, 2nd ed. Reading, MA: Addison Wesley, 2003. [E-book] Available: Safari e-book.[2] T. Eckes, The Developmental Social Psychology of Gender. MahwahNJ: Lawrence Erlbaum, 2000. [E-book] Available: netLibrary e-book.Article in online encyclopaedia[3] D. Ince, "Acoustic coupler," in A Dictionary of the Internet.Oxford: Oxford University Press, 2001. [Online]. Available: Oxford Reference Online, .[Accessed: May 24, 2005].[4] W. D. Nance, "Management information system," in The BlackwellEncyclopedic Dictionary of Management Information Systems,G.B. Davis, Ed. Malden MA: Blackwell, 1999, pp. 138-144.[E-book]. Available: NetLibrary e-book.E-JournalsStandard formatJournal article abstract accessed from online database[1] M. T. Kimour and D. Meslati, "Deriving objects from use casesin real-time embedded systems," Information and SoftwareTechnology, vol. 47, no. 8, p. 533, June 2005. [Abstract].Available: ProQuest, /proquest/.[Accessed May 12, 2005].Note: Abstract citations are only included in a reference list if the abstract is substantial or if the full-text of the article could not be accessed.Journal article from online full-text databaseNote: When including the internet address of articles retrieved from searches in full-text databases, please use the Recommended URLs for Full-text Databases, which are the URLs for the main entrance to the service and are easier to reproduce.[2] H. K. Edwards and V. Sridhar, "Analysis of software requirementsengineering exercises in a global virtual team setup,"Journal of Global Information Management, vol. 13, no. 2, p.21+, April-June 2005. [Online]. Available: Academic OneFile, . [Accessed May 31, 2005].[3] A. Holub, "Is software engineering an oxymoron?" SoftwareDevelopment Times, p. 28+, March 2005. [Online]. Available: ProQuest, . [Accessed May 23, 2005].Journal article in a scholarly journal (published free of charge on the internet)[4] A. Altun, "Understanding hypertext in the context of readingon the web: Language learners' experience," Current Issues in Education, vol. 6, no. 12, July 2003. [Online]. Available: /volume6/number12/. [Accessed Dec. 2, 2004].Journal article in electronic journal subscription[5] P. H. C. Eilers and J. J. Goeman, "Enhancing scatterplots withsmoothed densities," Bioinformatics, vol. 20, no. 5, pp.623-628, March 2004. [Online]. Available:. [Accessed Sept. 18, 2004].Newspaper article from online database[6] J. Riley, "Call for new look at skilled migrants," TheAustralian, p. 35, May 31, 2005. Available: Factiva,. [Accessed May 31, 2005].Newspaper article from the Internet[7] C. Wilson-Clark, "Computers ranked as key literacy," The WestAustralian, para. 3, March 29, 2004. [Online]. Available:.au. [Accessed Sept. 18, 2004].Internet DocumentsStandard formatProfessional Internet site[1] European Telecommunications Standards Institute, 揇igitalVideo Broadcasting (DVB): Implementation guidelines for DVBterrestrial services; transmission aspects,?EuropeanTelecommunications Standards Institute, ETSI TR-101-190,1997. [Online]. Available: . [Accessed:Aug. 17, 1998].Personal Internet site[2] G. Sussman, "Home page - Dr. Gerald Sussman," July 2002.[Online]. Available:/faculty/Sussman/sussmanpage.htm[Accessed: Sept. 12, 2004].General Internet site[3] J. Geralds, "Sega Ends Production of Dreamcast," ,para. 2, Jan. 31, 2001. [Online]. Available:/news/1116995. [Accessed: Sept. 12,2004].Internet document, no author given[4] 揂憀ayman抯?explanation of Ultra Narrow Band technology,?Oct.3, 2003. [Online]. Available:/Layman.pdf. [Accessed: Dec. 3, 2003].Non-Book FormatsPodcasts[1] W. Brown and K. Brodie, Presenters, and P. George, Producer, 揊rom Lake Baikal to the Halfway Mark, Yekaterinburg? Peking to Paris: Episode 3, Jun. 4, 2007. [Podcast television programme]. Sydney: ABC Television. Available:.au/tv/pekingtoparis/podcast/pekingtoparis.xm l. [Accessed Feb. 4, 2008].[2] S. Gary, Presenter, 揃lack Hole Death Ray? StarStuff, Dec. 23, 2007. [Podcast radio programme]. Sydney: ABC News Radio. Available: .au/newsradio/podcast/STARSTUFF.xml. [Accessed Feb. 4, 2008].Other FormatsMicroform[3] W. D. Scott & Co, Information Technology in Australia:Capacities and opportunities: A report to the Department ofScience and Technology. [Microform]. W. D. Scott & CompanyPty. Ltd. in association with Arthur D. Little Inc. Canberra:Department of Science and Technology, 1984.Computer game[4] The Hobbit: The prelude to the Lord of the Rings. [CD-ROM].United Kingdom: Vivendi Universal Games, 2003.Software[5] Thomson ISI, EndNote 7. [CD-ROM]. Berkeley, Ca.: ISIResearchSoft, 2003.Video recording[6] C. Rogers, Writer and Director, Grrls in IT. [Videorecording].Bendigo, Vic. : Video Education Australasia, 1999.A reference list: what should it look like?The reference list should appear at the end of your paper. Begin the list on a new page. The title References should be either left justified or centered on the page. The entries should appear as one numerical sequence in the order that the material is cited in the text of your assignment.Note: The hanging indent for each reference makes the numerical sequence more obvious.[1] A. Rezi and M. Allam, "Techniques in array processing by meansof transformations, " in Control and Dynamic Systems, Vol.69, Multidemsional Systems, C. T. Leondes, Ed. San Diego: Academic Press, 1995, pp. 133-180.[2] G. O. Young, "Synthetic structure of industrial plastics," inPlastics, 2nd ed., vol. 3, J. Peters, Ed. New York:McGraw-Hill, 1964, pp. 15-64.[3] S. M. Hemmington, Soft Science. Saskatoon: University ofSaskatchewan Press, 1997.[4] N. Osifchin and G. Vau, "Power considerations for themodernization of telecommunications in Central and Eastern European and former Soviet Union (CEE/FSU) countries," in Second International Telecommunications Energy SpecialConference, 1997, pp. 9-16.[5] D. Sarunyagate, Ed., Lasers. New York: McGraw-Hill, 1996.[8] O. B. R. Strimpel, "Computer graphics," in McGraw-HillEncyclopedia of Science and Technology, 8th ed., Vol. 4. New York: McGraw-Hill, 1997, pp. 279-283.[9] K. Schwalbe, Information Technology Project Management, 3rd ed.Boston: Course Technology, 2004.[10] M. N. DeMers, Fundamentals of Geographic Information Systems,3rd ed. New York: John Wiley, 2005.[11] L. Vertelney, M. Arent, and H. Lieberman, "Two disciplines insearch of an interface: Reflections on a design problem," in The Art of Human-Computer Interface Design, B. Laurel, Ed.Reading, MA: Addison-Wesley, 1990. Reprinted inHuman-Computer Interaction (ICT 235) Readings and Lecture Notes, Vol. 1. Murdoch: Murdoch University, 2005, pp. 32-37.[12] E. P. Wigner, "Theory of traveling wave optical laser,"Physical Review, vol.134, pp. A635-A646, Dec. 1965.[13] J. U. Duncombe, "Infrared navigation - Part I: An assessmentof feasibility," IEEE Transactions on Electron Devices, vol.ED-11, pp. 34-39, Jan. 1959.[14] M. Bell, et al., Universities Online: A survey of onlineeducation and services in Australia, Occasional Paper Series 02-A. Canberra: Department of Education, Science andTraining, 2002.[15] T. J. van Weert and R. K. Munro, Eds., Informatics and theDigital Society: Social, ethical and cognitive issues: IFIP TC3/WG3.1&3.2 Open Conference on Social, Ethical andCognitive Issues of Informatics and ICT, July 22-26, 2002, Dortmund, Germany. Boston: Kluwer Academic, 2003.[16] I. S. Qamber, "Flow graph development method,"Microelectronics Reliability, vol. 33, no. 9, pp. 1387-1395, Dec. 1993.[17] Australia. Attorney-Generals Department. Digital AgendaReview, 4 Vols. Canberra: Attorney- General's Department, 2003.[18] C. Rogers, Writer and Director, Grrls in IT. [Videorecording].Bendigo, Vic.: Video Education Australasia, 1999.[19] L. Bass, P. Clements, and R. Kazman. Software Architecture inPractice, 2nd ed. Reading, MA: Addison Wesley, 2003. [E-book] Available: Safari e-book.[20] D. Ince, "Acoustic coupler," in A Dictionary of the Internet.Oxford: Oxford University Press, 2001. [Online]. Available: Oxford Reference Online, .[Accessed: May 24, 2005].[21] H. K. Edwards and V. Sridhar, "Analysis of softwarerequirements engineering exercises in a global virtual team setup," Journal of Global Information Management, vol. 13, no. 2, p. 21+, April-June 2005. [Online]. Available: AcademicOneFile, . [Accessed May 31,2005].[22] A. Holub, "Is software engineering an oxymoron?" SoftwareDevelopment Times, p. 28+, March 2005. [Online]. Available: ProQuest, . [Accessed May 23, 2005].[23] H. Zhang, "Delay-insensitive networks," M.S. thesis,University of Waterloo, Waterloo, ON, Canada, 1997.[24] P. H. C. Eilers and J. J. Goeman, "Enhancing scatterplots withsmoothed densities," Bioinformatics, vol. 20, no. 5, pp.623-628, March 2004. [Online]. Available:. [Accessed Sept. 18, 2004].[25] J. Riley, "Call for new look at skilled migrants," TheAustralian, p. 35, May 31, 2005. Available: Factiva,. [Accessed May 31, 2005].[26] European Telecommunications Standards Institute, 揇igitalVideo Broadcasting (DVB): Implementation guidelines for DVB terrestrial services; transmission aspects,?EuropeanTelecommunications Standards Institute, ETSI TR-101-190,1997. [Online]. Available: . [Accessed: Aug. 17, 1998].[27] J. Geralds, "Sega Ends Production of Dreamcast," ,para. 2, Jan. 31, 2001. [Online]. Available:/news/1116995. [Accessed Sept. 12,2004].[28] W. D. Scott & Co, Information Technology in Australia:Capacities and opportunities: A report to the Department of Science and Technology. [Microform]. W. D. Scott & Company Pty. Ltd. in association with Arthur D. Little Inc. Canberra: Department of Science and Technology, 1984.AbbreviationsStandard abbreviations may be used in your citations. A list of appropriate abbreviations can be found below:。
XM-60多轴校准仪说明书

1Process foundationComponent quality is dependent on machine performance. Without understanding a machine’s error profile it is impossible to have confidence that your components will fall within specification during manufacture.Periodic measurement of a machine’s performance capability is the foundation of process control, providing a known, stable environment in which the process is to be performed. Quantifying process capability reduces costs and improves efficiency.3Why do you need an XM-60 multi-axis calibrator?The machine tool industry is developing quickly. Initiatives to improve efficiency, and reduce scrap and production costs have created the need to understand manufacturing processes better than ever before. Knowing machine capability before metal cutting is the foundation of any machining process.Laser interferometry, the globally recognised approach for machine calibration, offers the ultimate in accuracy. However, measuring one error per set-up is time consuming for users who wish to measure more than linear errors. With complex machine structures and more intricate components being manufactured, measuring linear performance alone is not enough. Frictional effects and other faults in the axis construction can cause the axis to rotate as it moves, creating a differencebetween the indicated and actual positions of machine elements. These ‘angular’ and ‘straightness’ effects can cause significantfeature position errors, or profile and surface deviation, resulting in out-of-tolerance components.The position of any object in space is defined by six degrees of freedom, similar to the relationship between a cutting tool and a workpiece inside a machine tool. Errors within each machine axis cause deviations in the parts produced. Only by measuring all the errors can an assessment of the process capability be made. Directly measuring all the errors simultaneously not only saves time but allows the true picture of a machine’s performance to be assessed.XM-60 measures all six degrees of freedomfrom a single set-up. Thishighlights problems beforethey affect productivity .Angular deviation of a machine axisThe effect of angular errors on a componentRapid measurement of all six degrees of freedom errors in any orientation.5XM-60 provides users with powerful machine diagnostic capability through the measurement of all degrees of freedom from a ‘single shot’. By capturing six degrees of freedom, users can discover the source of their errors, rather than the effect which is often seen when performing linear measurement alone.Reducing measurement uncertainties is important for any user. The XM-60 has been designed to measure machine errors directly, by aligning the laser beams with a machine axis. This reduces the inaccuracies which can result from complexmathematics used in alternative measurement techniques. Direct measurement makes comparison before and after machine adjustments a quick and simple task.Operation in any orientationThe pure optical system in the XM-60 allows operation in any orientation. The launch unit can be mounted on its side, upside down and on its back, useful for vertical axis testing, slant-bed lathes and more complex machine structures.Reducing measurement uncertaintiesis important for any user61. XM-60 launch unit System overviewKey features and benefits:• Quick – linear, pitch, yaw, roll, horizontal and verticalstraightness measurement in the same time as a singlemeasurement with conventional laser techniques.• Simple – easy set-up, familiar to users of otherinterferometric systems. Automatic sign detection andgraphical alignment minimise human errors.• Reassuring – measuring all errors directly allows the userto see results as the test is in progress.• Capable – unique optical roll measurement systemprovides roll measurement in any orientation.4. XC-80 environmental compensator2. XM-60 receiver1. Laser / launch unit• Flexible – a separate laser unit enables the use of a remote compact fibre optic launch unit. This gives more flexible mounting options and minimises the impact on measurement volume.• Thermal stability – the laser heat source is located outside the machine environment. The use of an external laser source reduces thermal effects on the measurement optics and on the machine under test.2. Receiver• Wireless communication – the roll and straightness data is communicated wirelessly back to the laser unit via an integrated wireless connection.• No cables – powered by rechargeable batteries avoiding trailing cables during machine moves.• Lightweight – designed to minimise the load on the machine spindle.3. CARTO software suite• Intuitive – guides the user through the workflow ofthe measurement process. The Capture and Explore applications provide data capture and analysis forXM-60.4. XC-80 environmental compensator• Reliable – XC-80 environmental compensator minimises the effect of the operating environment.• Accurate – maintains full measurement accuracyfrom 0 °C – 40 °C.5. System case• Portable – robust Peli™ storm system case designedto provide safe storage and transportation of thelaser system, with space for accessories and XC-80 compensator kit.1. Laser unit3. CARTO software suite9Precision engineeredEngineered by RenishawRenishaw laser measurement systems are manufactured to provide high performance and long operational lives. The aluminium substructure provides lightweight yet strong construction, designed to give the smallest package to fit onto machine tools. The combined weight of the launch andreceiver is only 2.5 kg.Thermal designThe XM-60 employs thermal breaks between the magnetic mount and the product housing. This ensures changes in machine thermals do not affect the device and temperature variation in the XM-60 does not affect machine performance.Roll detectionThe XM-60 provides a highly accurate laser system that incorporates unique technology with a patented optical roll measurement and fibre optic launch system. The compact launch unit is remote from the laser unit, reducing heat effects at the point of measurement. It can be mounteddirectly to the machine on its side, upside down and even on its back, which is particularly beneficial in areas with difficult machine access.10Precision engineeredFour-beam systemEasy, flexible set-up using any of the four beams duringvisual alignment. The only four-beam system on the marketmatching interferometric accuracy of angular and linearmeasurement with the simplicity of Position Sensitive Device(PSD) straightness measurement. Allows a greatly reducedpackage size.Proven performanceThe laser tube in the XM-60 is developed from technologyused in Renishaw’s RLE20 laser encoder system, producedfor over 10 years, and found in the most demandingapplications in the semiconductor industry.Attention to detailThe standard XM-60 kit is supplied with a set of magneticconduit clamps to tidy and control the conduit during a test.A comprehensive user guide is available in multiplelanguages for local support. The whole system can betransported in a portable ‘wheelie-case’ with an attachablefixturing kit.Our compact, optical rolldetection solution is atthe heart of the system’scapability.1113CARTO softwareThe CARTO software suite guides the users through the workflow of the XM-60 measurement process, from setting up a test to analysing the data. Building upon customer feedback and years of calibration experience, the intuitive user interface and the flow of the software matches the easy set-up of the XM-60 multi-axis calibrator.The CARTO suite is made up of two applications;• Capture to collect laser measurement data.• Explore to provide powerful analysis to international standards.CARTO features a database system which automatically stores and organises data for the user. This simplifies operation and allows users to quickly and easily compare data across multiple machines over time.The CARTO user interface can easily be configured to suit user preferences, with the ability to change themes and customise displays. It is tablet-friendly and has expandable menu sections for ease of use on compact screens.Test methods are automatically saved, so users conducting repeat tests can simply recall an earlier test.CaptureGuides the user step-by-step through the data capture processSoftware that thinks for the userWhen a new test method is created, CARTO can provide defaults from previous set-ups. Fields such as dwell time areautomatically populated based on the averaging that the user has chosen, saving the user test and set-up time.Automatic triggering for all channelsAlways having a linear position channel with XM-60 enables automatic triggering for all tests, even if the user is only interested in the angular measurement. There is never the need to manually trigger the laser.Elegant, simple alignmentThe straightness measurement from XM-60 is also used to align the system. CARTO graphically displays the alignment of the system making set-up simple and easy to understand.Part program generationCapture features a part program generator, supporting Fanuc 30, Heidenhain 530, Mazak Matrix and Siemens 840Dcontrollers, with more to follow.‘Free-run mode’Allows users to capture data immediately, without having to define the positions, or even the number of targets. The softwaredisplays straightness (horizontal and vertical), pitch, yaw and roll errors against linear position. T riggering can be manual(with a keypress), automatic (based on stability of position) or continuous (captured during motion at a user-defined interval).1415Analysis standardsDifferent companies need to comply with different standards, therefore each measurement (linear, pitch, yaw, roll andstraightness) can be displayed with all supported analysis standards. To make it easier for the user, these can also be sorted, enabled or hidden from view.PDF printingIn order to generate reports quickly, individual measurement data, test information, environmental conditions and error compensation can all be saved directly to pdf.TaggingAs the analysis browser fills up with a large quantity of tests, finding the data you need can take time. Explore has made this simple by allowing the user to assign a tag to any test saved in the database. All the data can then be filtered by a tag or multiple tags.CompareEven after a report has been printed, we don’t stop there. Explore features a handy comparison tool, allowing users to look through the history of their test records and see the effect that numerous factors have on six channels of error.Error compensationCreate linear error compensation files to improve machine performance. Error plots from before and after compensation can beadded to a comparison graph to verify the improved machine performance.ExploreRapid analysis and reporting of results17Magnetic mountingThe integral switchable magnetic base on the XM-60 launchunit allows quick attachment to the machine. An internalprotection device ensures the magnet is only activated whencorrectly installed on the machine, preventing damage.90 degree bracketThe 90 degree bracket enables users to switch the orientationof the XM-60 with ease. Guide pins assist the location of theXM-60 until the magnetic base is activated, making accuratepositioning simple. The 90 degree bracket can also be usedto mount the unit off the edge of the machine bed.Standard clamp block mountThe XM-60 receiver uses a clamp block and pillar method forsimple attachment to the machine. The standard kit containsfour pillars and two clamp blocks which gives even moreflexibility in mounting options.Custom fixture interfaceFor specialist fixture applications the clamp block can beeasily removed for the user to attach custom fixturing to theback of the receiver, using the tapped holes directly.Fixturing kitThe fixturing kit simplifies and extends the options formounting the XM-60 into the working volume of a machinetool. Applications that previously were too complex tomeasure can now easily be catered for. The kit contains aseries of extrusions that can be easily assembled.This supports users in:• measuring the full axis of travel for:• linear extension from the bed of the machine• vertically mounting beside the machine bed• mounting the XM-60 onto a chuck for lathe or machiningcentre applications•mounting the receiver extended from the spindleVersatile fixturing90 degree bracketFixturing kit mounting plate18Service and qualityTrainingRenishaw offers an established range of comprehensive operatortraining courses either on-site or at a Renishaw training centre.Our experience in metrology allows us to teach not just about ourproducts, but also underlying scientific principles and methods ofbest practice.This enables our customers to get the most out of theirmanufacturing processes.Our ongoing commitment to service and quality provides our customers with the complete solution19SupportOur products enhance quality and productivity, and we strive for total customer satisfaction through superior customer service and expert knowledge of potential product applications. When you purchase a laser or ballbar system from Renishaw, you are buying into a worldwide support network that understands machine metrology and the service of production equipment. Renishaw calibrations in the UK are traceable to the National Physical Laboratory, a signatory of the CIPM MRA. Calibration facilities worldwide can provide local laser calibration traceability.Design and buildNot only does Renishaw have comprehensive in-house design capability, its extensive manufacturing capacity allows it to produce nearly all components and assemblies in-house. This gives us the ability to fully understand and control our design and build process.The performance of Renishaw lasers has been independently verified by the National Physical Laboratory (UK) and the Physikalisch-Technische Bundesanstalt (Germany).21Renishaw’s innovation has transformed industrial metrology Renishaw offers a range of calibration solutions for machine tools, CMMs and other applications:XL-80 laser measurement system• The ultimate in traceable, versatile motion system analysis• ±0.5 ppm certified linear measurement accuracyXR20-W rotary axis calibrator• Measurement accuracy of ±1 arc second• Totally wireless operation for quick and easy set upQC20-W ballbar• The most widely used system for machine tool performance verification• Reduces machine down-time, scrap and inspection costsRenishaw laser encoder with RSU10• Linear axis measurement for fixed installations in a compact package• Compatible with Renishaw calibration software packagesMachine checking gauge• Volumetric measurement performance for CMMs• Verification of volumetric accuracy to BS ISO 10360-2AxiSet™ Check-Up• Rapid on-machine measurement of rotary axis performance•Accurate detection and reporting of errors in rotary axis pivot pointsXM-60 system informationIntegral USB comms, no seperate interfacePlease contact your local Renishaw office for further details at /contact23RENISHAW HAS MADE CONSIDERABLE EFFORTS TO ENSURE THE CONTENT OF THIS DOCUMENT IS CORRECT A T THE DATE OFPUBLICATION BUT MAKES NO WARRANTIES OR REPRESENTATIONS REGARDING THE CONTENT . RENISHAW EXCLUDES LIABILITY ,HOWSOEVER ARISING, FOR ANY INACCURACIES IN THIS DOCUMENT .© 2017 Renishaw plc. All rights reserved.Renishaw reserves the right to change specifications without notice.RENISHAW and the probe symbol used in the RENISHAW logo are registered trade marks of Renishaw plc in the United Kingdom and other countries.apply innovation and names and designations of other Renishaw products and technologies are trade marks of Renishaw plc or its subsidiaries.All other brand names and product names used in this document are trade names, trade marks or registered trade marks of their respective owners.About RenishawRenishaw is an established world leader in engineering technologies, with a strong history of innovation in product development and manufacturing. Since its formation in 1973, the company has supplied leading-edge products that increase process productivity, improve product quality and deliver cost-effective automation solutions.A worldwide network of subsidiary companies and distributors provides exceptional service and support for its customers.Products include:• Additive manufacturing and vacuum casting technologies for design, prototyping, and production applications• Dental CAD/CAM scanning systems and supply of dental structures• Encoder systems for high-accuracy linear, angle and rotary position feedback• Fixturing for CMMs (co-ordinate measuring machines) and gauging systems• Gauging systems for comparative measurement of machined parts• High-speed laser measurement and surveying systems for use in extreme environments• Laser and ballbar systems for performance measurement and calibration of machines• Medical devices for neurosurgical applications• Probe systems and software for job set-up, tool setting and inspection on CNC machine tools• Raman spectroscopy systems for non-destructive material analysis• Sensor systems and software for measurement on CMMs• Styli for CMM and machine tool probe applicationsFor worldwide contact details, visit /contactPart no: L-5103-4038-01-A Issued: 10.2017*L-5103-4038-01-A T +44 (0) 1453 524524F +44 (0) 1453 524901E ***************Renishaw plcNew Mills, Wotton-under-EdgeGloucestershire, GL12 8JRUnited Kingdom。
数据结构与算法常用英语词汇
数据结构与算法常用英语词汇.txt 女人谨记:一定要吃好玩好睡好喝好。
一旦累死了,就别的女人花咱的钱,住咱的房,睡咱的老公,泡咱的男朋友,还打咱的娃。
第一部份计算机算法常用术语中英对照Data Structures 基本数据结构Dictionaries 字典Priority Queues 堆Graph Data Structures 图Set Data Structures 集合Kd-Trees 线段树Numerical Problems 数值问题Solving Linear Equations 线性方程组Bandwidth Reduction 带宽压缩Matrix Multiplication 矩阵乘法Determinants and Permanents 行列式Constrained and Unconstrained Optimization 最值问题Linear Programming 线性规划Random Number Generation 随机数生成Factoring and Primality Testing 因子分解/质数判定Arbitrary Precision Arithmetic 高精度计算Knapsack Problem 背包问题Discrete Fourier Transform 离散 Fourier 变换Combinatorial Problems 组合问题Sorting 排序Searching 查找Median and Selection 中位数Generating Permutations 罗列生成Generating Subsets 子集生成Generating Partitions 划分生成Generating Graphs 图的生成Calendrical Calculations 日期Job Scheduling 工程安排Satisfiability 可满足性Graph Problems -- polynomial 图论-多项式算法Connected Components 连通分支Topological Sorting 拓扑排序Minimum Spanning Tree 最小生成树Shortest Path 最短路径Transitive Closure and Reduction 传递闭包Matching 匹配Eulerian Cycle / Chinese Postman Euler 回路/中国邮路Edge and Vertex Connectivity 割边/割点Network Flow 网络流Drawing Graphs Nicely 图的描绘Drawing Trees 树的描绘Planarity Detection and Embedding 平面性检测和嵌入Graph Problems -- hard 图论-NP 问题Clique 最大团Independent Set 独立集Vertex Cover 点覆盖Traveling Salesman Problem 旅行商问题Hamiltonian Cycle Hamilton 回路Graph Partition 图的划分Vertex Coloring 点染色Edge Coloring 边染色Graph Isomorphism 同构Steiner Tree Steiner 树Feedback Edge/Vertex Set 最大无环子图Computational Geometry 计算几何Convex Hull 凸包Triangulation 三角剖分Voronoi Diagrams Voronoi 图Nearest Neighbor Search 最近点对查询Range Search 范围查询Point Location 位置查询Intersection Detection 碰撞测试Bin Packing 装箱问题Medial-Axis Transformation 中轴变换Polygon Partitioning 多边形分割Simplifying Polygons 多边形化简Shape Similarity 相似多边形Motion Planning 运动规划Maintaining Line Arrangements 平面分割Minkowski Sum Minkowski 和Set and String Problems 集合与串的问题Set Cover 集合覆盖Set Packing 集合配置String Matching 模式匹配Approximate String Matching 含糊匹配Text Compression 压缩Cryptography 密码Finite State Machine Minimization 有穷自动机简化Longest Common Substring 最长公共子串Shortest Common Superstring 最短公共父串DP——Dynamic Programming——动态规划recursion ——递归第二部份数据结构英语词汇数据抽象 data abstraction数据元素 data element数据对象 data object数据项 data item数据类型 data type抽象数据类型 abstract data type逻辑结构 logical structure物理结构 phyical structure线性结构 linear structure非线性结构 nonlinear structure基本数据类型 atomic data type固定聚合数据类型 fixed-aggregate data type可变聚合数据类型 variable-aggregate data type 线性表 linear list栈 stack队列 queue串 string数组 array树 tree图 grabh查找,线索 searching更新 updating排序(分类) sorting插入 insertion删除 deletion前趋 predecessor后继 successor直接前趋直接后继双端列表循环队列immediate predecessor immediate successor deque(double-ended queue) cirular queue指针 pointer先进先出表(队列) first-in first-out list 后进先出表(队列) last-in first-out list栈底栈定压入弹出队头bottom top push pop front队尾 rear上溢 overflow下溢 underflow数组 array矩阵 matrix多维数组 multi-dimentional array以行为主的顺序分配 row major order以列为主的顺序分配 column major order 三角矩阵 truangular matrix对称矩阵 symmetric matrix稀疏矩阵 sparse matrix转置矩阵 transposed matrix链表 linked list线性链表 linear linked list单链表 single linked list多重链表 multilinked list循环链表 circular linked list双向链表 doubly linked list十字链表 orthogonal list广义表 generalized list链 link指针域 pointer field链域 link field头结点 head 头指针 head 尾指针 tail 串 string node pointer pointer空白(空格)串blank string 空串(零串) null string子串 substring树 tree子树 subtree森林 forest根 root叶子结点深度层次双亲孩子leaf node depth level parents children兄弟 brother祖先 ancestor子孙 descentdant二叉树 binary tree平衡二叉树 banlanced binary tree 满二叉树 full binary tree彻底二叉树 complete binary tree遍历二叉树 traversing binary tree 二叉排序树 binary sort tree二叉查找树 binary search tree线索二叉树 threaded binary tree 哈夫曼树 Huffman tree有序数 ordered tree无序数 unordered tree判定树 decision tree双链树 doubly linked tree数字查找树 digital search tree树的遍历 traversal of tree先序遍历 preorder traversal中序遍历 inorder traversal后序遍历 postorder traversal图 graph子图 subgraph有向图无向图彻底图连通图digraph(directed graph) undigraph(undirected graph) complete graphconnected graph非连通图 unconnected graph强连通图 strongly connected graph 弱连通图 weakly connected graph 加权图 weighted graph有向无环图 directed acyclic graph 稀疏图 spares graph稠密图 dense graph重连通图 biconnected graph二部图 bipartite graph边 edge顶点 vertex弧 arc路径 path回路(环) cycle弧头弧尾源点终点汇点headtailsource destination sink权 weight连接点 articulation point 初始结点 initial node终端结点 terminal node相邻边 adjacent edge相邻顶点 adjacent vertex 关联边 incident edge入度 indegree出度 outdegree最短路径 shortest path有序对 ordered pair无序对 unordered pair简单路径简单回路连通分量邻接矩阵simple pathsimple cycle connected component adjacency matrix邻接表 adjacency list邻接多重表 adjacency multilist遍历图 traversing graph生成树 spanning tree最小(代价)生成树 minimum(cost)spanning tree生成森林 spanning forest拓扑排序 topological sort偏序 partical order拓扑有序 topological orderAOV 网 activity on vertex networkAOE 网 activity on edge network关键路径 critical path匹配 matching最大匹配 maximum matching增广路径 augmenting path增广路径图 augmenting path graph查找 searching线性查找(顺序查找) linear search (sequential search)二分查找 binary search分块查找 block search散列查找 hash search平均查找长度 average search length散列表 hash table散列函数 hash funticion直接定址法 immediately allocating method 数字分析法 digital analysis method平方取中法 mid-square method折叠法 folding method除法 division method随机数法 random number method排序 sort内部排序 internal sort外部排序 external sort插入排序 insertion sort随小增量排序 diminishing increment sort 选择排序 selection sort堆排序 heap sort快速排序归并排序基数排序外部排序quick sort merge sortradix sort external sort平衡归并排序 balance merging sort二路平衡归并排序 balance two-way merging sort 多步归并排序 ployphase merging sort置换选择排序 replacement selection sort文件 file主文件 master file顺叙文件 sequential file索引文件 indexed file索引顺叙文件 indexed sequential file索引非顺叙文件 indexed non-sequential file直接存取文件 direct access file多重链表文件 multilist file倒排文件 inverted file目录结构 directory structure树型索引 tree index。
MAX11635EEE+T;MAX11634EEE+;MAX11635EEE+;MAX11636EEE+;MAX11637EEE+;中文规格书,Datasheet资料
General DescriptionThe MAX11634–MAX11637 are serial 12-bit analog-to-digital converters (ADCs) with an internal reference and true differential track/hold. These devices feature on-chip FIFO, scan mode, internal clock mode, internal averag-ing, and AutoShutdown™. The maximum sampling rate is 300ksps using an external clock. The MAX11636/MAX11637 have 8 input channels and the MAX11634/MAX11635 have 4 input channels. These four devices operate from either a +3V supply or a +5V supply, and contain a 10MHz SPI™-/QSPI™-/MICROWIRE™-compati-ble serial port.The MAX11634–MAX11637 are available in a 16-pin QSOP package. All four devices are specified over the extended -40°C to +85°C temperature range.ApplicationsSystem Supervision Data-Acquisition Systems Industrial Control Systems Patient Monitoring Data Logging InstrumentationFeatureso Analog Multiplexer with True Differential Track/Hold8-/4-Channel Single-Ended 4-/2-Channel True Differential Unipolar or Bipolar Inputs o Single Supply2.7V to3.6V (MAX11635/MAX11637)4.75V to5.25V (MAX11634/MAX11636)o External Reference: 1V to V DD o 16-Entry First-In/First-Out (FIFO)o Scan Mode, Internal Averaging, and Internal Clock o Accuracy: ±1 LSB INL, ±1 LSB DNL, No Missing Codes Over Temperature o 10MHz 3-Wire SPI-/QSPI-/MICROWIRE-Compatible Interface o Small 16-Pin QSOP PackageMAX11634–MAX11637Track/Hold, and Internal Reference________________________________________________________________Maxim Integrated Products1For pricing, delivery, and ordering information,please contact Maxim Direct at 1-888-629-4642,Ordering Information/Selector GuideAutoShutdown is a trademark of Maxim Integrated Products, Inc. SPI/QSPI are trademarks of Motorola, Inc.MICROWIRE is a trademark of National Semiconductor Corp.+Denotes a lead(Pb)-free/RoHS-compliant package.T = Tape and reel.M A X 11634–M A X 1163712-Bit, 300ksps ADCs with Differential Track/Hold, and Internal ReferenceABSOLUTE MAXIMUM RATINGSELECTRICAL CHARACTERISTICS(V DD = 2.7V to 3.6V (MAX11635/MAX11637), V DD = 4.75V to 5.25V (MAX11634/MAX11636), f SAMPLE = 300kHz, f SCLK = 4.8MHz Stresses beyond those listed under “Absolute Maximum Ratings” may cause permanent damage to the device. These are stress ratings only, and functional operation of the device at these or any other conditions beyond those indicated in the operational sections of the specifications is not implied. Exposure to absolute maximum rating conditions for extended periods may affect device reliability.V DD to GND..............................................................-0.3V to +6V CS , SCLK, DIN, EOC , DOUT to GND.........-0.3V to (V DD + 0.3V)AIN0–AIN5, REF-/AIN6, CNVST/AIN7,REF+ to GND.........................................-0.3V to (V DD + 0.3V)Maximum Current into any Pin............................................50mA Continuous Power Dissipation (T A = +70°C)QSOP (single-layer board)(derate 8.3mW/°C above +70°C).................................667mWOperating Temperature Range ...........................-40°C to +85°C Storage Temperature Range.............................-60°C to +150°C Junction Temperature......................................................+150°C Lead Temperature (soldering, 10s).................................+300°C Soldering Temperature (reflow).......................................+260°CPACKAGE THERMAL CHARACTERISTICS (Note 1)QSOPJunction-to-Ambient Thermal Resistance (θJA )...............105°C/W Junction-to-Case Thermal Resistance (θJC )......................37°C/WNote 1:Package thermal resistances were obtained using the method described in JEDEC specification JESD51-7, using a four-layer board. For detailed information on package thermal considerations, refer to /thermal-tutorial .MAX11634–MAX1163712-Bit, 300ksps ADCs with DifferentialTrack/Hold, and Internal Reference_______________________________________________________________________________________3ELECTRICAL CHARACTERISTICS (continued)(V DD = 2.7V to 3.6V (MAX11635/MAX11637), V DD = 4.75V to 5.25V (MAX11634/MAX11636), f SAMPLE = 300kHz, f SCLK = 4.8MHzM A X 11634–M A X 1163712-Bit, 300ksps ADCs with Differential Track/Hold, and Internal Reference 4_______________________________________________________________________________________DD DD Note 4:Offset nulled.Note 5:Time for reference to power up and settle to within 1 LSB.Note 6:Conversion time is defined as the number of clock cycles multiplied by the clock period; clock has 50% duty cycle.Note 7:The operational input voltage range for each individual input of a differentially configured pair is from GND to V DD . The operational input voltage difference is from -V REF /2 to +V REF /2.Note 8:See Figure 3 (Equivalent Input Circuit) and the Sampling Error vs. Source Impedance curve in the Typical OperatingCharacteristics section.Note 9:When CNVST is configured as a digital input, do not apply a voltage between V IL and V IH .Note 10:Supply current is specified depending on whether an internal or external reference is used for voltage conversions.Temperature measurements always use the internal reference.ELECTRICAL CHARACTERISTICS (continued)(V DD = 2.7V to 3.6V (MAX11635/MAX11637), V DD = 4.75V to 5.25V (MAX11634/MAX11636), f SAMPLE = 300kHz, f SCLK = 4.8MHzMAX11634–MAX1163712-Bit, 300ksps ADCs with DifferentialTrack/Hold, and Internal Reference_______________________________________________________________________________________5measurements.Typical Operating Characteristics(V DD = 3V, V REF = 2.5V, f SCLK = 4.8MHz, CLOAD = 30pF, T A = +25°C for MAX11635/MAX11637, unless otherwise noted. V DD = 5V,V REF = 4.096V, f SCLK = 4.8MHz, C LOAD = 30pF, T A = +25°C for MAX11634/MAX11636, unless otherwise noted.)INTEGRAL NONLINEARITY vs. OUTPUT CODEOUTPUT CODE (DECIMAL)I N L (L S B )307220481024-0.8-0.6-0.4-0.200.20.40.60.81.0-1.04096INTEGRAL NONLINEARITY vs. OUTPUT CODEOUTPUT CODE (DECIMAL)I N L (L S B )307220481024-0.8-0.6-0.4-0.200.20.40.60.81.0-1.04096DIFFERENTIAL NONLINEARITYvs. OUTPUT CODEOUTPUT CODE (DECIMAL)D N L (L S B )307220481024-0.8-0.6-0.4-0.200.20.40.60.81.0-1.04096M A X 11634–M A X 1163712-Bit, 300ksps ADCs with Differential Track/Hold, and Internal Reference 6_______________________________________________________________________________________Typical Operating Characteristics (continued)(V DD = 3V, V REF = 2.5V, f SCLK = 4.8MHz, C LOAD = 30pF, T A = +25°C for MAX11635/MAX11637, unless otherwise noted. V DD = 5V,V REF = 4.096V, f SCLK = 4.8MHz, C LOAD = 30pF, T A = +25°C for MAX11634/MAX11636, unless otherwise noted.)DIFFERENTIAL NONLINEARITYvs. OUTPUT CODEOUTPUT CODE (DECIMAL)D N L (L S B )307220481024-0.8-0.6-0.4-0.200.20.40.60.81.0-1.04096SINAD vs. FREQUENCYFREQUENCY (kHz)S I N A D (d B )100105560657075805011000SFDR vs. FREQUENCYFREQUENCY (kHz)S F D R (d B )10010607080901005011000THD vs. FREQUENCYFREQUENCY (kHz)T H D (d B )10010-90-80-70-60-50-10011000SUPPLY CURRENT vs. SAMPLING RATESAMPLING RATE (ksps)I D D (µA )1001050010001500200025003000011000SUPPLY CURRENT vs. SAMPLING RATESAMPLING RATE (ksps)I D D (µA )1001020040060080010001200140016001800011000SUPPLY CURRENT vs. SUPPLY VOLTAGEV DD (V)I D D (µA )5.154.855.054.951200140016001800200022002400260010004.755.25MAX11634–MAX1163712-Bit 300ksps ADCs with FIFO, Temp Sensor, Internal Reference_______________________________________________________________________________________7Typical Operating Characteristics (continued)(V DD = 3V, V REF = 2.5V, f SCLK = 4.8MHz, C LOAD = 30pF, T A = +25°C for MAX11635/MAX11637, unless otherwise noted. V DD = 5V,V REF = 4.096V, f SCLK = 4.8MHz, C LOAD = 30pF, T A = +25°C for MAX11634/MAX11636, unless otherwise noted.)V DD (V)I D D (µA )SUPPLY CURRENT vs. SUPPLY VOLTAGE3.5 3.63.3 3.42.9 3.0 3.1 3.22.820040060080010001200140016001800200002.7SHUTDOWN SUPPLY CURRENTvs. SUPPLY VOLTAGEV DD (V)I D D (µA )5.154.855.054.950.10.20.30.40.50.60.70.804.755.25SHUTDOWN SUPPLY CURRENTvs. SUPPLY VOLTAGEV DD (V)I D D (µA )3.53.43.33.23.13.02.92.80.10.20.30.40.52.73.6SUPPLY CURRENT vs. TEMPERATURETEMPERATURE (°C)I D D (µA )603510-15130016001900220025001000-4085SUPPLY CURRENT vs. TEMPERATURETEMPERATURE (°C)I D D (µA )603510-1580010001200140016001800600-4085SHUTDOWN SUPPLY CURRENTvs. TEMPERATURETEMPERATURE (°C)I D D (µA )603510-150.51.01.52.02.50-4085SHUTDOWN SUPPLY CURRENTvs. TEMPERATURETEMPERATURE (°C)I D D (µA )603510-150.20.40.60.81.00-4085M A X 11634–M A X 1163712-Bit, 300ksps ADCs with Differential Track/Hold, and Internal Reference 8_______________________________________________________________________________________Typical Operating Characteristics (continued)(V DD = 3V, V REF = 2.5V, f SCLK = 4.8MHz, C LOAD = 30pF, T A = +25°C for MAX11635/MAX11637, unless otherwise noted. V DD = 5V,V REF = 4.096V, f SCLK = 4.8MHz, C LOAD = 30pF, T A = +25°C for MAX11634/MAX11636, unless otherwise noted.)INTERNAL REFERENCE VOLTAGEvs. SUPPLY VOLTAGEV DD (V)V R E F (V )5.155.054.954.854.0954.0964.0974.0984.0994.0944.755.25INTERNAL REFERENCE VOLTAGEvs. SUPPLY VOLTAGEV DD (V)V R E F (V )3.33.02.4982.4992.5002.5012.5022.4972.73.6INTERNAL REFERENCE VOLTAGEvs. TEMPERATURETEMPERATURE (°C)V R E F (V )603510-154.084.094.104.114.124.07-4085INTERNAL REFERENCE VOLTAGEvs. TEMPERATURETEMPERATURE (°C)V R E F (V )603510-152.482.492.502.512.522.47-4085OFFSET ERROR vs. SUPPLY VOLTAGEV DD (V)O F F S E T E R R O R (L S B )5.155.054.954.85-0.4-0.200.20.40.6-0.64.755.25OFFSET ERROR vs. SUPPLY VOLTAGEV DD (V)O F F S E T E R R O R (L S B )3.33.00.951.001.051.100.902.73.6OFFSET ERROR vs. TEMPERATURETEMPERATURE (°C)O F F S E T E R R O R (L S B )603510-15-0.6-0.20.20.61.0-1.0-4085MAX11634–MAX1163712-Bit, 300ksps ADCs with DifferentialTrack/Hold, and Internal Reference_______________________________________________________________________________________9Typical Operating Characteristics (continued)(V DD = 3V, V REF = 2.5V, f SCLK = 4.8MHz, C LOAD = 30pF, T A = +25°C for MAX11635/MAX11637, unless otherwise noted. V DD = 5V,V REF = 4.096V, f SCLK = 4.8MHz, C LOAD = 30pF, T A = +25°C for MAX11634/MAX11636, unless otherwise noted.)OFFSET ERROR vs. TEMPERATURETEMPERATURE (°C)O F F S E T E R R O R (L S B )603510-150.70.91.11.31.50.5-4085GAIN ERROR vs. SUPPLY VOLTAGEV DD (V)G A I N E R R O R (L S B )5.155.054.954.850.10.20.30.40.50.60.704.755.25GAIN ERROR vs. SUPPLY VOLTAGEV DD (V)G A I N E R R O R (L S B )3.33.0-0.4-0.3-0.2-0.10-0.52.73.6GAIN ERROR vs. TEMPERATURETEMPERATURE (°C)G A I N E R R O R (L S B )603510-15-0.6-0.20.20.61.0-1.0-4085GAIN ERROR vs. TEMPERATURETEMPERATURE (°C)G A I N E R R O R (L S B )603510-15-0.3-0.10.10.30.5-0.5-4085-10-6-8-2-4020426810SAMPLING ERROR vs. SOURCE IMPEDANCESOURCE IMPEDANCE (k Ω)S A M P L I N G E R R O R (L S B )M A X 11634–M A X 1163712-Bit, 300ksps ADCs with Differential Track/Hold, and Internal ReferencePin Configuration分销商库存信息:MAXIMMAX11635EEE+T MAX11634EEE+MAX11635EEE+ MAX11636EEE+MAX11637EEE+MAX11634EEE+T MAX11636EEE+T MAX11637EEE+T MAX11635EVKIT+。
基于Lyapunov函数球杆系统的设计
基于Lyapunov函数球杆系统的设计摘要:本文以球杆系统作为非线性被控对象,采用Lagrange法分别构建非线性动力学模型,并通过虚拟反馈输入法简化模型。
本文构造一种基于Lyapunov函数状态反馈的稳定性控制。
最后,在Simulink平台上对本文的控制策略进行了仿真实验,并与其它控制策略进行对比,验证了本文方法的有效性。
关键词:非线性控制系统关系度反馈线性化1 球杆装置的结构球杆实验装置有许多不同的类型,各种类型结构都具有不同的特征,对控制器的设计要求也有很大的不同。
球杆系统作为倍受欢迎的实验室设备,如图1所示的球杆系统[1~2],将杆的一端固定,另一端通过连杆与传动齿轮连接,这样的球杆系统,通过传动机构调解横杆的摆角,电机通过齿轮减速再作用到杆上降低了反应灵敏度,并且导轨两端有隔板防止了小球滚落。
本文采用的球杆系统是由固高科技(深圳)有限公司开发设计的GBB1004,其简化示意图如图1所示[3~4]。
整个系统由球杆运动机构(包括齿轮和四连杆机构)、控制器、传感器和直流电源等部分组成[2]。
钢制的小球可以在一个水平轨道内自由转动,而该轨道可以绕着固定端转动,电机带动齿轮通过连杆调整轨道的水平倾角,可以控制小球在轨道上的位置。
如果没有闭环控制,显然这个系统是不稳定的,因为当导轨绝对水平时,小球可以平衡在轨道上的任何一个位置,但是一旦有干扰,小球就会滚动到无穷远处无法回到原来的位置。
导轨上有一个线性位移传感器,可以测量小球在杆上的位移,伺服电机有一个角度编码器,可以实现电机的角位移测量。
球杆系统的控制器是基于DSP的智能伺服运动控制器。
2 球杆装置的Lagrange方法建模这里简述采用拉格朗日方程的建模过程[2]。
球杆系统参数和变量如下:L为横杆长度;M为横杆质量;R为钢球半径;l为连杆长度;d为连杆齿轮接点与齿轮中心距离;m为钢球质量;J为横杆绕着固定端的转动惯量。
拉格朗日方程方法建模可以表述为:对于球杆系统中球和导轨的动力学方程可以用拉格朗日方程建模[5]。
Doherty功率放大器(英文)

The Doherty Power AmplifierThe current wireless communication systems have made significant progress toward increased bandwidth and number of carriers for high-data-rate applications. Memory effects, however, make it very difficult to design a high-power amplifier with a wide instantaneous bandwidth. In addition to bandwidth concerns, the instantaneous transmit powers of the wireless communication systems, such as CDMA-2000, wide-band code division multiple access (WCDMA), orthogonal frequency division multiplexity (OFDM) and so on, vary widely and rapidly, carrying high peak-to-average ratio (PAR) signals. The base station power amplifiers for the systems require a high linearity to amplify the high PAR signal source without distortion. To satisfy linearity requirements, the power amplifiers are usually biased at class A or AB mode and must operate at a large amount of back-off from the peak output power. Another requirement of the base station power amplifier for the modern wireless communication systems is high efficiency. As the communication systems are reduced in both size and cost, the cooling system should be simple and small, requiring a power amplifier with high efficiency. Because the base station power amplifiers have a low efficiency due to the back-off operation, efficiency enhancement techniques become very important. The design technique of the base station power amplifiers with high efficiency and linearity across a wide instantaneous bandwidth has become a hot issue.In this article, we show that the Doherty amplifier is capable of delivering the stringent requirements of the base station power amplifiers. We explain the operation principles, including both linearity and efficiency improvements, and the basic circuit configuration of the amplifier. Advanceddesign methods to operate across wide bandwidth and improve the linearity are also described. For verification, the Doherty amplifier is implemented using laterally diffused metal oxide semiconductor (LDMOS) transistors and measured using a WCDMA 4FA signal. These results show that the Doherty amplifier is a promising candidate for base station power amplifiers with wide bandwidth, high efficiency, and linearity.Doherty Amplifier OperationFigure1. (a) Operational diagram of the Doherty amplifier. (b)Fundamental currents. (c) Load impedances.The Doherty amplifier was first proposed by W.H. Doherty in 1936. The original Doherty amplifier consisted of two tube amplifiers and an impedance inverting network. The efficiency of an RF power amplifier isincreased using the RF Doherty amplifier technique, as described in detailin . This amplifier consisted of a carrier amplifier and a peaking amplifier. The output load is connected to the carrier amplifier through an impedance inverter (a quarter-wave transmission line) and directly to the peaking amplifier. Figure 1(a) shows an operational diagram to analyze the Doherty amplifier circuit. Two current sources represent the amplifiers. It is assumed that each current source is linearly proportionalto the input voltage signal, operating as a class AB or class B amplifier with harmonic short circuits after it is turned on, and the efficiency analysis can be carried out using the fundamental and dc components only. As shown in Figure 1(b), the peaking amplifier turns on at one-half the maximum input voltage.The Doherty amplifier technique is based on the load impedance change of each amplifier, referred to as load modulation, according to the input power level. Figure 1(b) shows the fundamental currents from the amplifiers. The load impedances of two amplifiers are given bywhere ZL is the load impedance of the Doherty amplifier; IC and IP represent the fundamental currents of the carrier and peaking amplifiers, respectively; and ZC and ZP are the output load impedances of the carrier and peaking amplifiers, respectively, and are depicted in Figure 1(c).In the low-power region (0 ∼Vin, max/2), the peaking amplifier remains in the cut-off state, and the load impedance of the carrier amplifier is two times larger than that of the conventional amplifier. Thus, the carrier amplifier reaches the saturation state at the input voltage(Vin, max)/2 since the maximum fundamental current swing is half and the maximum voltage swing reaches Vdc. As a result, the maximum power level is half of the carrier amplifier’s allowable power level (a quarter of the total maximumpower or 6 dB down from the total maximum power), and the efficiency of the amplifier is equal to the maximum efficiency of the carrier amplifier as shown in Figure 2.In the high-power region (Vin, max/2 ∼Vin, max), where the peaking amplifier is conducting, the current level of the peaking amplifier plays an important role in determining the load modulation of the Doherty amplifier[see (1) and (2)]. Assuming that gm of the peaking amplifier is twice as large as that of the carrier amplifier, the current and voltage swings of the peaking amplifier increase in proportion to the input voltage level and the voltage swing reaches the maximum voltage swing of Vdc only at the maximum input voltage. The load impedance of the carrier amplifier varies from 2Zopt to Zopt, and the peaking amplifier varies from ∞ to Zopt according to the input voltage level as shown in Figure 1(c). The efficiency of the Doherty amplifier at the maximum input voltage is equal to the maximum efficiency of the amplifiers. When the peaking amplifier is the same size as the carrier amplifier, which is normally the case, gm of the two amplifiers are identical and the peaking amplifier can not be fully turned on, so the power performance is degraded [4]. From the basic operation principle, we have explored the Doherty amplifier, which provides higher efficiency over whole power ranges compared to the conventional class AB amplifiers. The resulting Doherty amplifier can solve the problem of maintaining a high efficiency for a large PAR signal.Linearity of the Doherty AmplifierThe linearity of the Doherty amplifier is more complicated than that of a class AB amplifier. The class AB biased carrier amplifier has a load impedance at the low power level that is twice as large and the high impedance of the carrier amplifier compensates the low gain characteristicdue to the input power division. At high power levels, the two amplifiers generate full power using normal load impedances, equalizing the power gain. Additionally, in the low-power region, the linearity of the amplifier is entirely determined by the carrieramplifier. Therefore, the carrier amplifier should be highly linear even though the load impedance is highAt a high power level, linearity of the amplifier is improved by the harmonic cancellation from the two amplifiers using appropriate gate biases. Figure 3 shows the third-order harmonic generation coefficient gm3 of an LDMOS transistor and the bias points of the two amplifiers. In terms of gain characteristics of each amplifier, a late gain expansion of the class C biased peaking amplifier compensates the gain compression of the class AB carrier amplifier. Thus, the Doherty amplifier, which is based on the load modulation technique, is capable of delivering more linear output power than a conventional class AB power amplifier. The third-order intermodulation (IM3) level from the carrier amplifier increases and the phase of the IM3 decreases because the gain of the carrier amplifier is compressed. In contrast, when the gain of the peaking amplifier is expanded, both the IM3 level and phase increase. To cancel out the IM3s from the two amplifiers, th e components must be 180◦ out of phase with the same amplitudes. Therefore, the peaking amplifier should be designed appropriately to cancel the harmonics of the carrier amplifier..The Circuit Configuration of Doherty AmplifierFigure 4 shows a schematic diagram of the fully matched microwave Doherty amplifier with offset transmission lines at the output circuits [5]. The carrier and peaking amplifiers have input/output matching circuits, which transform from the input impedances of the devices to 50 and from the optimum load impedance Zopt of the devices to 50 , respectively. Theadditional offset transmission lines with characteristic impedance of 50 are connected after the matching circuits of the carrier and peaking amplifiers. In the low-power region, the phase adjustments of the offset lines cause the peaking amplifier to be open-circuited and the characteristic load impedance of the carrier amplifier is doubled to2Ro by a quarterwave impedance transformer. This is illustrated in Figure 5(a) and (b). The offset line of the carrier amplifier varies from Zopt to 2Zopt for the proper load modulation as shown in Figure 5(a). Figure 5(b) illustrates that the offset line of the peaking amplifier adjusts to the high impedance so that it prevents power leakage. Figure 5(c) shows the appropriate transformations on a Smith chart to determine the offset line length of each amplifier. The lines do not affect the overall matching condition and load modulation because they are matched to the characteristic impedance of 50 . The Doherty output combining circuit consists of a quarter-wave transmission line with the characteristic impedance of 50 and a quarter-wave transmission line that transforms from 50 to 25 to determine the load impedance of theoutput combining circuit. A phase delay line is needed at the input of the peaking amplifier to adjust the same delay between the carrier and peaking amplifiers [6].The Doherty amplifier consists of a class AB biased carrier amplifier and a class C biased peaking amplifier. Due to the different biasing, the RF current from the amplifiers are different depending on the input drive level. The asymmetric powers are combined by the Doherty operation through a quarter-wave impedance converter. Advanced Design Methods for the Doherty AmplifierThe fundamental operation principles of a Doherty amplifier were described in the previous section. We have seen that the advantages of themicrowave Doherty amplifier are the simple circuit configuration and improved efficiency and linearity. In this section, we explain some typical issues with Doherty amplifiers and present proposed methods to address them.The Doherty amplifier for the base station system usually has two amplifiers with identical size devices, matching circuits, and input drives. Because the peaking amplifier is biased lower than the carrier amplifier, the current level of the peaking amplifier at the maximum input drive cannot reach the maximum allowable current level. Thus, the load impedances of both amplifiers can not be fully modulated to the optimized impedance, Zopt, and they are larger than the optimum values. As a result, the conventional Doherty amplifier is heavily saturated, and both linearity and power are degraded. It is difficult to improve the linearity of the Doherty amplifier across a wide bandwidth due to the memory effect. We propose the following three design methods for wide bandwidth, high linearity, and high power applications: 1) Uneven power drive, applying more power to the peaking amplifier, can open the peaking amplifier fully and modulate the load impedances optimally. Therefore, the amplifiers with uneven power drive operate more linear and produce more power than those with an identical input power drive. 2) Because of the improper load modulation, power matching circuits of both amplifiers should be appropriately designed to have low load impedances for better linearity. Due to the low bias point of the peaking amplifier, the power matching circuit of the peaking amplifier should be designed to have lower load impedance than that of the carrier amplifier. Moreover, the matching circuits of both amplifiers should be individually optimized to enhance the IM cancellation over power ranges across the wide bandwidth. 3) The bias circuit should be designed to minimize the memory effects. The linearizing techniques focused on harmonic cancellation such as Doherty amplifier and PD are restricted to a low cancellation limit because the memory effect brings about the different lower and upper spuriousemissions. The bias circuit should not have any frequency dispersion of envelope impedance to minimize the memory effect. To reduce the memory effect, the bias circuit is optimized using a quarter-wave bias line and decoupling capacitors for each frequency. The tantalum capacitors are inserted within a quarterwave bias line for the short at the envelope frequencies. Additionally, the biases of both amplifiers are properly adjusted to maintain optimized linearity and efficiency.Bias Circuit Test to Reduce the Memory EffectsThe effects on the memory effect for different bandwidthsare ACLR or intermodulation distortion (IMD) asymmetry and bandwidth dependent adjacent channel leakage ratio (ACLR) or IMD characteristics. To reduce these effects or the memory effects, the load impedances of the bias circuit should be reduced to short the envelope frequency voltage component or maintained at the same value.We have tested several bias circuits to reduce the memory effect as shown in Figure 6. Figures 7 and 8 represent measurement results of load impedances corresponding to the bias circuit. Unfortunately, we cannot measure the envelope frequency load impedance (dc–20 MHz), but we have tested the load impedances at 100 MHz–5 GHz. We can analogize the envelope frequency load impedance of the bias circuit from these test results.The general bias circuit scheme of RF power amplifier is shown in Figure 6(b). From Figures 7 and 8, we have analogized that the envelope load impedances of the RF decoupling capacitor (10 pF) and envelopefrequency decoupling capacitor (22 uF and 10 uF) were very small. Even though the envelope load impedances of this case are very small, the power amplifier has the serious memory effect. A cause of this result is that it is very difficult to short the envelope frequency voltage component because the load impedance of the high-power amplifier is very small. To minimize the memory effect, the load impedance of the bias circuit should be further reduced. Thus, we have proposed the bias circuit optimization method of the RF decoupling capacitor (10 pF) and envelope frequency decoupling capacitor [22 uF, 10 uF, and the tantalum capacitor (1 uF) located within a quarter-wave bias circuit], and Figures 7(c) and 8(c) show more small envelope load impedances and lower load impedance variation than the general bias scheme at the low frequency. However, the impedance at RF is reduced by tantalum capacitor located within a quarter-wave bias line as shown in Figure 7(c). Thus, we need to optimize the bias circuit along with the matching circuit considering these effects. As a result, the proposed bias circuit optimization method can reduce the memory effect more efficiently than the conventional bias circuit method, and ACLR asymmetry is reduced.Implementation of the Doherty Amplifier and Measurement Results In the previous section, we explained the basic Doherty operation and advanced design methods with uneven power drive, individually optimized matching, and bias circuit optimization.A2.14-GHz Doherty amplifier for the base station power amplifier is implemented using Freescale’s MRF5P21180 LDMOSFET. Figure 9 shows a photograph of the implemented Doherty amplifier applying the advanced methods. The uneven power drive is implemented using an Anaren’s 1A1305-5 (5 dB directional coupler) which delivers 4 dB more input power to the peaking amplifier than the carrier amplifier. The individual matching of the Doherty amplifier isfurther optimized to achieve high efficiency and linearity at 25 W (44 dBm) average output power. In the experiments, the suitable offset line is 80.4◦, and the transformed output impedance of the peaking amplifier in the off state is 502 .Quiescent biases for the carrier amplifier and peaking amplifier are set to Vc = 3.938 V (1.1 A) and Vp = 1.713 V at Vdd = 27 V, respectively. We optimize the bias circuit to minimize the memory effect and improve the linearity and efficiency. For performance comparison, we also fabricated a class AB amplifier and Doherty amplifier with even power drive. The class AB amplifier represents a conventional base station power amplifier of the push-pull type. For specific comparison corresponding to uneven power drive, the Doherty amplifier with even drive is optimized using the individual matching and bias circuit to achieve linearity and efficiency as high as possible.Figure 10 shows the measured adjacent channel leakage ratio (ACLR) of the Doherty amplifier with uneven drive and class AB amplifier at offset 5 MHz for a 2.14-GHz forward link wideband code-division multiple-access (WCDMA) 4FA signal. The ACLR is improved by about 7 dB compared to the class AB amplifier at an output power of 44 dBm.Figure 11 shows the measured ACLR of the Doherty amplifiers for both even and uneven drives. In comparison with the even case, the Doherty amplifier with uneven power drive delivers significantly improved ACLR performance, by 3 dB at the average output power of 44 dBm.Figure 12 shows the measured ACLR performance of the uneven case as a function of the bias circuit optimization. The drain bias circuit incorporates a quarterwave line and several decoupling capacitors which consist of 10 pF for the RF and 22 uF, 10 uF, 1 uF, 1 nF, 150 nF for the envelope frequency. The tantalum capacitors (22 uF, 1 uF) located within aquarter-wave bias line are especially important to minimize the memory effect, even though the impedance at RF is reduced by these capacitors. Thus, we have optimized the bias circuit along with the matching circuit considering these effects. As a result, the bias circuit becomes an active matching circuit, and the difference in ACLR with the bias circuit optimization between lower and upper ACLR is reduced below 2 dB over all average output powers. Figure 13 shows the spectrum of the Doherty amplifier with uneven power drive at an average output power of 44 dBm according to the bias circuit optimization.Figure 14 shows the measured IMD3 of the Doherty amplifier with both even and uneven power drives for a two-tone signal. We measure a peak envelope power (PEP) using a two-tone signal with 1-MHz tone spacing. The PEP of the amplifier with uneven drive is improved by 15 W, from 165 to 180 W, compared to the even case. This result implies that the Doherty amplifier with uneven power drive generates full power from both amplifiers.Figure 15 shows drain efficiencies of the Doherty amplifier with both even and uneven power drive and the class AB power amplifier for WCDMA 4 FA signal. The drain efficiency of the Doherty amplifier is significantly improved over the class AB amplifier.These results show clearly that the Doherty amplifier is far superior to the class AB amplifier. The Doherty amplifier with uneven power drive, based on the individually optimized matching circuit and the bias optimization, provides highly efficient and linear operation compared to the normal Doherty amplifier. We can also see that the proposed design method is very helpful in achieving the Doherty amplifier with high performance over a wide bandwidth.ConclusionsIn this article, we explained the basic Doherty operation principle, including both efficiency and linearity improvements, and the circuit configuration of the normal Doherty amplifier. We proposed advanced design methods for highly efficient and linear Doherty amplifier operation across a wide bandwidth. The Doherty amplifier is implemented using Freescale LDMOS MRF5P21180. The amplifier utilizes uneven power drive, individually optimized matching, and bias circuit optimization.For a 2.14-GHz WCDMA 4 FA signal, the Doherty amplifier has ACLR of −41 dBc and a drain efficiency of 33% at an average output power of 44 dBm. These experimental results clearly demonstrate the superior performance of the Doherty amplifier compared to class AB amplifiers and conventional Doherty amplifiers. Theproposed design methods are well suited for the design of the Doherty amplifier for wide-bandwidth and high-power operation.。
【最新精选】体育运动项目的英文表达方式
体育运动项目的英文表达方式1.General Terms 一般词汇manager 经纪人instructor 教练,技术指导guide 领队trainer 助理教练referee, umpire (网球.棒球)裁判linesman, touch judge (橄榄球)裁判contestant, competitor, player 运动员professional 职业运动员amateur 业余运动员,爱好者enthusiast, fan 迷,爱好者favourite 可望取胜者 (美作:favorite)outsider 无取胜希望者championship 冠军赛,锦标赛champion 冠军record 纪录record holder 纪录创造者ace 网球赛中的一分Olympic Games, Olympics 奥林匹克运动会Winter Olympics 冬季奥林匹克运动会stadium 运动场track 跑道ring 圈ground, field 场地pitch (足球、橄榄球)场地court 网球场team, side 队返回页首2.Athletics 竞技race 跑middle-distance race 中长跑long-distance runner 长跑运动员sprint 短跑 (美作:dash)the 400 metre hurdles 400米栏marathon 马拉松decathlon 十项cross-country race 越野跑jump 跳跃jumping 跳跃运动high jump 跳高long jump 跳远 (美作:broad jump)triple jump, hop step and jump 三级跳pole vault 撑竿跳throw 投掷throwing 投掷运动putting the shot, shot put 推铅球throwing the discus 掷铁饼throwing the hammer 掷链锤throwing the javelin 掷标枪walk 竞走返回页首3.Individual Sprots 体育项目gymnastics 体操gymnastic apparatus 体操器械horizontal bar 单杠parallel bars 双杠rings 吊环trapeze 秋千wall bars 肋木side horse, pommelled horse 鞍马weight-lifting 举重weights 重量级boxing 拳击Greece-Roman wrestling 古典式摔跤hold, lock 揪钮judo 柔道fencing 击剑winter sports 冬季运动skiing 滑雪ski 滑雪板downhill race 速降滑雪赛,滑降slalom 障碍滑雪ski jumping competition 跳高滑雪比赛ski jump 跳高滑雪ice skating 滑冰figure skating 花样滑冰roller skating 滑旱冰bobsleigh, bobsled 雪橇返回页首4.Games and Competitions 球类运动football 足球rugby 橄榄球basketball 篮球volleyball 排球tennis 网球baseball 垒球handball 手球hockey 曲棍球golf 高尔夫球cricket 板球ice hockey 冰球goalkeeper 球门员centre kick 中线发球goal kick 球门发球throw in, line-out 边线发球to score a goal 射门得分to convert a try 对方球门线后触地得分batsman 板球运动员batter 击球运动员mens singles 单打运动员in the mixed doubles 混合双打返回页首5.Water Sports 水上运动swimming pool 游泳池swimming 游泳medley relay 混合泳crawl 爬泳breaststroke 蛙式backstroke 仰式freestyle 自由式butterfly (stroke) 蝶泳diving competition 跳水water polo 水球water skiing 水橇rowing 划船canoe 划艇boat race 赛艇yacht 游艇kayak 皮船sailing 帆船运动outboard boat 船外马达返回页首6.Bicycles and Motorcycles 自行车和摩托车car 车类运动velodrome, cycling stadium 自行车赛车场road race 公路赛race 计时赛chase 追逐赛motorcycle, motorbike 摩托车racing car 赛车racing driver 赛车驾驶员rally 汽车拉力赛返回页首7.Riding and Horse Races 赛马riding 骑马racecourse, racetrack 跑马场,赛马场jockey, polo 马球rider 马球运动员show jumping competition 跳跃赛steeplechase 障碍赛fence 障碍trotter 快跑的马返回页首8.Tennis 网球tennis 网球运动lawn tennis 草地网球运动grass court 草地网球场racket 球拍racket press 球拍夹gut, string (球拍的)弦line ball 触线球baseline ball 底线球sideline ball 边线球straight ball 直线球down-the-line shot 边线直线球crosscourt 斜线球high ball, lob 高球low ball 低球long shot 长球short shot 短球cut 削球smash 抽球jump smash 跃起抽球spin 旋转球low drive 抽低球volley 截击空中球low volley 低截球deep ball 深球heavy ball 重球net 落网球flat stroke 平击球flat drive 平抽球let 重发球fluke, set-up, easy 机会球ground stroke 击触地球wide 打出边线的球overhead smash, overhand smash 高球扣杀game 局set 盘fifteen all 一平thirty all 二平forty all 三平deuce 局末平分, 盘末平局love game 一方得零分的一局double fault 双误, 两次发球失误‘not up’, 两跳,还击前球着地两次service line 发球线fore court 前场back court 后场centre mark 中点server 发球员receiver 接球员返回页首9.Swimming 游泳swimming pool 游泳池changing room 更衣室shower 淋浴diving platform 跳台ten-meter platform 10米跳台five-meter platform 5米跳台three-meter springboard 3米跳板one-meter springboard 1米跳板diving pool 跳水池non-swimmers pool 浅水池swimmers pool 深水池starting block 出发台starting dive 出发起跳rope with cork floats 水线swimming lane 泳道touching the finishing line 终点触线timekeeper 计时员lifesaver, lifeguard 救生员land drill 陆上练习breaststroke 蛙泳crawl stroke 爬泳back stroke 仰泳side stroke 侧泳butterfly stroke 蝶泳dolphin butterfly stroke 海豚式蝶泳treading water 踩水underwater swimming 潜泳swimming pool with artificial waves 人工海浪泳池artificial waves 人工海浪swimming trunks 泳裤swimsuit, swimming suit 泳衣swimming cap 泳帽bikini 比基尼泳衣bikini top 比基尼乳罩bikini bottom 比基尼式泳裤surfing 冲浪surfboard 冲浪板water ski 滑水橇返回页首10.Football 足球football, soccer, Association football 足球field, pitch 足球场midfied 中场kick-off circle 中圈half-way line 中线football, eleven 足球队football player 足球运动员goalkeeper, goaltender, goalie 守门员back 后卫left 左后卫right back 右后卫centre half back 中卫half back 前卫left half back 左前卫right half back 右前卫forward 前锋centre forward, centre 中锋inside left forward, inside left 左内锋inside right forward, inside right 右内锋outside left forward, outside left 左边锋outside right forward, outside right 右边锋kick-off 开球bicycle kick, overhead kick 倒钩球chest-high ball 平胸球corner ball, corner 角球goal kick 球门球ground ball, grounder 地面球hand ball 手触球header 头球penalty kick 点球spot kick 罚点球free kick 罚任意球throw-in 掷界外球ball handling 控制球block tackle 正面抢截body check 身体阻挡bullt 球门前混战fair charge 合理冲撞chesting 胸部挡球close-marking defence 钉人防守close pass, short pass 短传consecutive passes 连续传球deceptive movement 假动作diving header 鱼跃顶球flying headar 跳起顶球dribbling 盘球finger-tip save (守门员)托救球clean catching (守门员)跳球抓好flank pass 边线传球high lobbing pass 高吊传球scissor pass 交叉传球volley pass 凌空传球triangular pass 三角传球rolling pass, ground pass 滚地传球slide tackle 铲球clearance kick 解除危险的球to shoot 射门grazing shot 贴地射门close-range shot 近射long drive 远射mishit 未射中offside 越位to pass the ball 传球to take a pass 接球spot pass 球传到位to trap 脚底停球to intercept 截球to break through, to beat 带球过人to break loose 摆脱to control the midfield 控制中场to disorganize the defence 破坏防守to fall back 退回to set a wall 筑人墙to set the pace 掌握进攻节奏to ward off an assault 击退一次攻势to break up an attack 破坏一次攻势ball playing skill 控球技术total football 全攻全守足球战术open football 拉开的足球战术off-side trap 越位战术wing play 边锋战术shoot-on-sight tactics 积极的抢射战术time wasting tactics 拖延战术Brazilian formation 巴西阵式, 4-2-4 阵式four backs system 四后卫制four-three-three formation 4-3-3 阵式four-two-four formation 4-2-4 阵式red card 红牌(表示判罚出场)yellow card 黄牌(表示警告)返回页首11.Baseball and Softball 棒球和垒球baseball 棒球baseball field, baseball ground 棒球场softball 垒球softball field, softball ground 垒球场infield,diamond 内场outfield 外场fair territory 界内地区foul territory 界外地区foul line 边线base line 垒间线base 垒bag 垒垫, 垒包home base 本垒first base 一垒second base 二垒third base 三垒home plate 本垒板pitchers plate 投手板pitchers mound (棒球)投手土墩pitchers circle (垒球)投手圈batters box 击球员区on deck circle 击球员准备区catchers box 接手区coachers box 跑垒指导员区bench, dug-out 队员席bull-pen 候补投手练习区glove 手套, 分指手套milt 合指手套bat 球棒mask 护面chest protector 护胸leg protector 护腿supporter 护裆helmet 护帽baseball player 棒球运动员softball player 垒球运动员pitcher 投手catcher 接手fielder 守场员baseman 守垒员infielder 内场手first baseman 一垒手second baseman 二垒手third baseman 三垒手shortstop 游击手outfielder 外场手batter, hitter 击球员base-runner 跑垒员batter-runner 击跑员relief pitcher 候援投手designated hitter (DH) 指名击球员coacher 跑垒指导员manager 总教练plate umpire 司球裁判员base umpire 司垒裁判员inning 局次visiting team 先攻队home team 后攻队offensive team 攻队defensive team 守队pitching 投手投球windup position (棒球投手)正面投球法set up position (棒球投手)侧身投球法sling shot (垒球投手)后摆投球法wind mill (垒球投手)绕环投球法8 figure (垒球投手)8字投球法throwing 传球catching 接球fielding 防守batting, hitting 击球base running 跑垒stealing 偷垒sliding 滑垒strike zone 好球区fair ball 界内球foul ball 界外球illegal pitch 不合法投球illegally batted ball 不合法击球bunt 触击球foul tip 擦棒球bunting 触击swing 挥击ground ball, grounder 地滚球liner, line drive 平直球fly ball 腾空球hit, safety hit 安全打one base hit 一垒打two base hit 二垒打three base hit 三垒打home run, homer 本垒打sacrifice hit 牺牲打sacrifice bunt 牺牲触击sacrifice fly 牺牲腾空球squeeze bunt 抢分触击run and hit, hit and run 击跑配合战术safe 安全上垒base on balls 四球安全上垒struck-out 三击出局run,score 得分batting order 击球次序wild pitch (投手)暴投pick-off (投手)牵制跑垒员的传球balk (棒球)投手犯规put-out 接杀out, down, away 出局touch out 触杀force out 封杀assist 助杀run down 夹杀double play, double kill 双杀triple play, triple kill 三杀wild throw 野传球passed ball 接手漏接球ball in play, live ball 继续比赛, 活球ball not in play, dead ball 死球cover 补位back up 策应cut-off 拦接play shallow 近迫防守play deep 後撤防守appeal play 申诉行为called game 有效比赛forfeited game 比赛弃权batting average 安打率fielding average 防守率earned run 投手责任失分complete game 无安打无得分获胜的比赛返回页首12.Wrestling 搏击类竞技Greek-Roman wrestling 古典式摔跤wrestler 摔跤运动员standing wrestling 站立摔on-the-ground wrestling 跪撑摔bridge 角力桥free style wrestling 自由式摔跤bar arm with grapevine 锁臂缠腿double leg lock 抱单腿拦腿摔返回页首13.其它运动项目的中英文表达方式,请看下文:1.体操 gymnastics2.游泳 swimming3.击剑 fencing4.举重 weightlifting 5.棒球 baseball6.篮球 basketball7.排球 volleyball8.乒乓球 table tennis 9.足球 soccer10.跳水 diving11.马球 polo12.水球 water polo 13.垒球 softball14.网球 tennis15.赛艇 canoe16.冲浪 surfing17.自行车 cycling 18.羽毛球 badminton 19.田径 track and field 20.手球 handball21.摔交 wrestling 22.拳击 boxing23.射箭 toxophily 24.射击 shooting25.柔道 judo26.骑马 equestrian 27.曲棍球 hockey附加总结类文档一篇,不需要的朋友可以下载后编辑删除,谢谢(中学生感恩节主题教育活动总结5篇)中学感恩节活动总结范文1一、活动目的如今虽然很多人注意到生活礼仪,谢谢常挂在嘴边,但是大家或许是因为羞于表达或许出于缺少机会而省略了对于身边亲人、朋友和老师的感谢。
powRgrip工具系统说明书

1 powRgrip Toolholders - Features | Benefits2 Features | Benefits3 Information4 CAT | PG Toolholders5 TC | PG Toolholders6 BT | PG Toolholders7 CYL | PG Toolholders8 HSK | PG Toolholders10 REGO-FIX CAPTO | PG Toolholders11 VDI | PG - CYL | PG Toolholders12 Swiss Quick Tool Changing System13 CYL SSY | PG Toolholders (Softsyncro)14 XL Toolholder - Vibration Decay Chart15 CAT/PG | XL (Xtended Length Toolholders)16 BT/PG | XL (Xtended Length Toolholders)17 TC/PG | XL (Xtended Length Toolholders)18 HSK/PG | XL (Xtended Length Toolholders)19 REGO-FIX CAPTO | PG XL Toolholders20 powRgrip Collets - What are PG Collets21 PG 6 - PG 1022 PG 15 - PG 25 - PG 3223 PG Boring Bar Collets24 secuRgrip | PG25 CAT | BT secuRgrip | PG26 HSK-A | HSK-E&F secuRgrip | PG27 REGO-FIX CAPTO secuRgrip | PG28 secuRgrip | PG Collets & Accessories30 Matching Products31 Maximum & Minimum Tool Depth32 Weldon Flats & h6 Shank tolerancesPGHomepowRgrip®What is powRgrip?Swiss QualityMade in Switzerland to ISO 9001/ISO 14001.What is powRgripREGO-FIX’s powRgrip System is a unique collet-holding systemthat utilizes a special shallow-tapered collet that is pressed intoa holder with a matching taper. This state-of-the-art systemuses either a hydraulic hand-pump or a table top hydraulic pressspecifically designed to quickly insert these collets with up to 9tons of force.T.I.R. of the Whole System < 0.0001" (3 μm)Highest clamping force and lowest runout.Taper Accuracy AT3Better spindle-to-holder fit and accuracy.Surface Finish max. Ra 0.25Higher clamping force and higher transferable torque.Q+® Balancing100% balanced to lowest possible residual imbalance.• Steep Taper balanced to G2.5 @ 22,000 rpm• BT 30 Taper balanced to 30,000 rpm• HSK 25 balanced to 90,000 rpm• HSK 32 balanced to 60,000 rpm• HSK 40 balanced to 45,000 rpm• HSK 50 balanced to 30,000 rpm• HSK 63 G2.5 @ 25,000 rpm• HSK 80 G2.5 @ 25,000 rpm• HSK 100 G2.5 @ 25,000 rpm• HSK 125 G2.5 @ 25,000 rpmHi-Q® Balancing SystemReady to accept Hi-Q® balancing rings which will allow for theoffset of the imbalance introduced by the cutting tool up to80,000 rpm.Minimal Outside DimensionsSlim design provides more processing flexibility.FastTool clamping with hydraulic press < 10 seconds.Excellent at Small DiametersClamping of small diameter tools from Ø 0.2 mm.Presetable Tooling SystemRepeatability < 0.0004" (10 μm)PGHomepowRgrip®T.I.R. of < 0.0001" (3 μm)Clamping operation in less than10 seconds when using the PGUautomatic machine.High vibration dampening due tothe interupted surfaces betweenthe toolholder to collet and thecollet to tool shank.Highest transferable torque andlowest T.I.R., even after 20,000tool changesFor 5 years or 20,000 cycles,REGO-FIX® guarantees theT.I.R. of a properly maintainedpowRgrip® holder and collet willnot exceed 0.0001” and that theimpregnated surface treatmentwill not erode.Precise length adjustmentrepeatability <0.0004" (10 μm)Clamps all types of toolshanks andmaterials in h6 tolerance from Ø0.0079" – 1.0" (0.2 – 25.4 mm)Developed for optimal productivitysuch as High Speed Cutting(HSC) and High PerformanceCutting (HPC)Transferable Torque of the powRgrip® SystemPGHomeInformationPG ToolholdersApplicationsThese toolholders are designed for use on CNC machiningcenters with automatic tool changers. They are especiallysuited for High Speed Cutting (HSC) and High PerformanceCutting (HPC) operations where processing reaches themachine limits. The vibration dampening of PG colletholdersreduce spindle wear and extend tool life.BalancingREGO-FIX® Q+® System PG toolholders are balanced bydesign to G 2.5 @ 22,000 rpm for steep taper holders andup to 90,000 rpm for HSK holders. Type H toolholders areready to accept Hi-Q® balancing rings which allow precisionbalancing of the system up to 80,000 rpm depending on thebalancing rings used.Coolant ThroughFor use with coolant through tools.Peripheral CoolingPG-CF collets for peripheral cooling with non-coolantthrough tools.Matched Tooling System for Best FitFor highest precision and best results the whole systemcounts. For that reason REGO-FIX® components arecarefully matched to fit together. This guarantees bestrun-out and balancing.ToolPrecise preset repeatabilityfor both HSS and carbidetoolsColletSlightly tapered shapemaximizes clamping forceHolderSuperior runout andvibration dampening ina variety of taper stylesAs a Licensed BIG Plus manufacturer, REGO-FIX® usesnew state of the art measuring and grinding systems tocreate the most accurate dual contact holders that canbe produced.Flange ContactPGHomeStandardCAT ToolholdersCAT CAT+ PGForm B“BIG-PLUS SYSTEM - Licensed by BIG Daishowa”CAT+ 40 ToolholdersPGHomeStandardTC Toolholders (DIN 69871)Form BTC PGPGHomeBT ToolholdersStandardForm BBT BT+PG“BIG-PLUS SYSTEM - Licensed by BIG Daishowa”BT+ ToolholdersPGHome12Form BExtensionsPG Toolholders Type OMCYL PGBT OM PGPGHomeHSK - Form A HoldersHSK - Form A & E Holders ContinuedHSK PG* Not for use with balancing rings.+Compatible with Willemin-Macodel MachinesPGHomeHSK PGHSK - Form E Holders ContinuedPGHomeREGO-FIX CAPTO HoldersREGO-FIX CAPTO PGPGHomeVDI PGThe PG VDI holder program brings the benefits tolathes that until now, only milling machines have takenadvantage of for years. These include better TIR,improved tool dampening, easier presetting, longer toollife and unparalleled clamping forces.The PG Cylindrical Turning holders have all of the featuresthat you expect from the PG system, now available formachines that require cylindrical holders. Available inthe most common mounting block and turret diameters,these holders will bring new precision and repeatability toany machine application.Cylindrical PG VDI ToolholdersCylindrical ToolholdersPGHomePGU Automatic or PGC hand-pump is requiredfor use with the powRgrip SystemWhat is Swiss Quick?powRgrip / ER Reductions Swiss Quick Tool Changing SystemSwiss QualityMade in Switzerland to ISO 9001/ISO 14001.What is Swiss Quick Tool Changing SystemOne of the latest REGO-FIX innovations is the SwissQuick ER to ER adapter. These are short “mini-holders” with a solid ER body profile on the back end, and a smaller ER series cavity on the front end. This unique design results in the shortest and most rigid ER to ER reduction available. Because of the solid body design, accuracy can be improved with a taper to collet cavity TIR of less than 0.0001” (3 um), and are repeatable within 0.0005” on tool length.Locking RingSpecial locking ring to insure that the collet body is removed with the nut.Matched Tooling System for Best FitFor highest precision and best results the whole system counts. For that reason REGO-FIX ® components are carefully matched for optimum fit and accuracy. This guarantees the best run-out and balance.TIR of the SystemPG run-out of 0.0001” or better when using the REGO-FIX ® powRgrip ® System.ER run-out of 0.0002” or better with a REGO-FIX ®UP ColletPGHomeCYL SSY PGDIN 1835 B+EPG Softsynchro®Tapping HolderApplicationsREGO-FIX® Softsynchro® tapping holders are used onmachines that are designed for direct tapping. Manyof the newer CNC machines feature synchronizationbetween spindle feed and thread pitch. This allows touse rigid tapping holders. However due to the dynamicsof spindle and linear motors synchronization errorsoccur. To compensate for these synchronization errorsSoftsynchro® tapping holders with minimal lengthadjustment are necessary. Depending on the applicationSoftsynchro® tapping holders increase tool life up to150%.Comparison TestsThe two diagrams show the axial forces when cold-forming M10 threads in St37 steel.Conclusion: Axial forces increase with increasing rpm.With REGO-FIX® Softsynchro® tapping holders the forcesare considerably lower than when using rigid tappingtoolholders. Therefore the surface quality and tool life isoptimized when using Softsynchro® tapping holders on asynchronized machine spindle.CYL SSY/PGSoftsynchro®Tapping HoldersHSK-A SSY/PGSoftsynchro®Tapping HoldersAxialkraft[N]Zeit [s]Drehzahl 2000 min-1Zeit [s]Axialkraft[N]Zeit [s]REGO- F IX® Softsynchro®-GewindeschneidfutterMitbewerber Synchron-WerkzeugaufnahmeStarre Synchron-WerkzeugaufnahmeTime Sec.Time Sec.AxialForce[N]AxialForce[N]PGHomeVibration Decay Chart This New MICRO-FRICTION DAMPENING™ (MFD) technology (pat. pending) from REGO-FIX allows the holders to dissipate vibrations faster than standard long reach holders. Dampening the vibrations faster means that your cutting tool, part and spindle will see less vibrations resulting in better surface finishes, longer tool life and less spindle wear.Machining parameters have to be adapted to the gauge length of the Xtended LengthToolholders100200300400500600700B e s c h l e u n i g u n g i n m /s / A c c e l e r a t i o n i n m /s100200300400500600700Standard toolholderREGO-FIX ® Xtended Length Toolholder with MFD™ Technology.A c c e l e r a t i o n i n m /s2Time in msA c c e l e r a t i o n i n m /s 2Time in msREGO-FIX ® XL ToolholderNote: Maximum 5,000 r.p.m.ANSI B5.50MAS 403DIN 69871DIN 69893PGHomeREGO-FIX CAPTO PG XLPGHomepowRgrip® Collets What are PG Collets?Swiss QualityMade in Switzerland to ISO9001/ISO14001.What are PG ColletspowRgrip (PG) Collets are precisely engineered to exactingtolerances. This assures that once the collets are pressedinto the matching powRgrip holder, the result will be anaccurately assembled system of less than 0.0001” TIR.Special metal processing provides the collets unique blackappearance and results in an extremely hard surface finishthat allows users to experience unmatched longevity andrepeatability.PrecisionHighest T.I.R. <0.0001” .Accurate Length Adjustment <10 μmWith integrated adjustment screw.Clamping of all h6 Tool ShanksCylindrical, WELDON, Whistle-NotchClamping of all Shank MaterialsSolid carbide and HSS tool shanks.Clamping Diameters0.2 to 25.4 mmFastClamping in less than 10 seconds.Simple HandlingParameters are automatically set.High Vibration DampeningHigh vibration dampening due to the interface surfacesbetween the toolholder to collet and the collet to tool shank.Highest Transferable TorqueThe powRgrip® system yields the highest transferabletorque of all comparable systems.Productivity and Tool LifeSpecially designed to allow for maximum machiningcapability.PG Collets do not have a clamping range. Nominal diameter only. Requires h6 tolerance shanks which are listed on page 31.PG 10 ColletsPG 6 ColletsPG REGO-FIX ®Standard Collet Metallic SealedPG REGO-FIX ®Coolant FlushPG Collet OptionsPG REGO-FIX®Standard Collet Metallic Sealed PG REGO-FIX®Coolant FlushPG Collet Options PG 15 ColletsPG 25 & PG 32 ColletsPGHomeThe PG boring bar collets bring the ability to transformyour normal PG holder into a boring bar holder withoutlosing accuracy or repeatability. The collets are designedto hold the cylindrical boring bar and position it correctlyin the PG holder.Boring Bar Collets PG-TsecuRgripApplicationspowRgrip now offers an option for those most difficult machinging applications that require the ultimate in cutting tool security. secuRgrip utilizes powRgrips’ tremendous gripping strength in combination with a patented locking key system and threaded cap. These two additional levels of cutting tool security provide an added degree of confidence for those special applications such as expensive castings or complex parts.Ease of UseUnlike other systems, secuRgrip does not require the purchase of any expensive special modified endmills from limited manufacturers. Instead, it allows for the use of standard Weldon flat tools on any standard carbide or HSS endmill.LockingThe locking key fits into the Weldon flat prior to assembly and secures the endmill to the collet in this easy to assemble system. A special locking cap then locks the collet and cutter assembly to the holder once pressed in.PresettingAll secuRgrip collets are designed to provide “z” height adjustment when required. secuRgrip is currently available in both the PG 25 and PG 32 holder series.Level 1 Security Locking Key on Cutting ToolLevel 2 Security Locking Cap forPG ColletCAT+ PG-SG HoldersCAT PG-SG HoldersBT+ PG-SG HoldersBT PG-SG HoldersBT secuRgrip PG“BIG-PLUS SYSTEM - Licensed by BIG Daishowa”“BIG-PLUS SYSTEM - Licensed by BIG Daishowa”HSK A PG-SG HoldersHSK E & F PG-SG HoldersHSK E & F secuRgrip PGPGHomeREGO-FIX CAPTO PG-SG HoldersREGO-FIX CAPTO secuRgrip PGsecuRgrip Collets with InsertPGHomePGU 9006 automatic clamping unit with push-button operation and auto clamping insert recognition. Designed tomake operation easy, fast and reliable. Easy interchangeable inserts and safety interlocks make the machine safefor all operators.PGC hand pumps offer a price advantage over the PGU units while still performing the task of pressing in tools. Theoperator actuates the pressure by use of the lever arm until the desired pressure is achieved.Automatic Machine & InsertsHandpump & InsertsPGU 9006 PGC 2506PGHomeTaper CleanerCleaning Paper SetProvides a quick and easy method of cleaning the powRgrip® holderbore of oil and debris before insertion of the tool.A soft, absorbant paper specially prepared for cleaning thepowRgrip® holder bore. The paper is lint-free and chemicallyneutral. For one time use only!Each pack contains 250 papers.Matching ProductsPresetting ToolThe powRgrip® presetting tool accepts the powRgrip® collets,and is inserted into the toolholder. The tool has a small thumbwheel for precise tool length adjustments, and allows maximumrepeatability in the toolholder assembly.PGHomeLDia.Maximum & Minimum Tool DepthPGHomeWeldon Flatsh6 Shank Tolerances。
NBA篮球术语-中英文对照解析

NBA篮球专业术语汇集NBA球队分区及主场ABA(American Basketball Association):创立于1967年的美国职篮联盟,1976年倒闭。
All-American Team:简称全美第一队。
NBA(National Basketball Association):职篮联盟。
NCAA(national collegiate athletic association):美国大学运动协会。
HBL(high school of basketball league):高中篮球联赛。
Atlantic Division大西洋区Boston Celtics :波士顿凯特尔队Fleet Center 福利特中心球馆New Jersey Nets :新泽西网队 Continental Airline Arena 大陆航空球场New York Knickerbockers :纽约尼克斯队Madison Square Garden 麦迪逊广场花园Philadelphia 76ers :费城76人队First Union Center 第一联盟中心Toronto Raptors :多伦多猛龙队Air Canada Centre 加拿大航空中心球场Central Division中央区Chicago Bulls :芝加哥公牛队United Center 联合中心球馆Cleveland Cavaliers:克里夫兰骑士队Gund Arena 冈德体育馆Detroit Pistons:底特律活塞队The Palace of Auburn Hills 奥本山球场Indiana Pacers :印地安纳步行者队 Market Square Arena 城市广场球馆Milwaukee Bucks :密尔沃基雄鹿队 Bradley Center 布拉德利中心Southeast Division东南区Atlanta Hawks:亚特兰大鹰队Philips Arena 飞利浦斯球场Charlotte Bobcats :夏洛特山猫队 Bobcats Arena 夏洛特体育馆Miami Heat :迈阿密热队 American Airlines Arena 美航球馆Orlando Magic:奥兰多魔术队TD Waterhouse Centre 水屋中心体育馆Washington Wizards :华盛顿奇才队 MCI Centre MIC中心球馆Southwest Division西南区Dallas Mavericks :达拉斯小牛 American Airlines Center 美国航空中心球场Houston Rockets :休斯敦火箭队 Toyota Center 丰田中心球馆New Hornets :新奥尔良黄蜂队 New Orleans Arena 新奥尔良球馆Memphis Grizzlies :孟菲斯灰熊队 General Motors Place 金字塔球场San Antonio Spurs :圣安东尼马刺队SBC Center SBC中心球馆Northwest Division西北区Denver Nugget :丹佛金块Pepsi Center 百事中心球馆Minnesota Timberwolves :明尼苏达森林狼队。
线性螺丝钉的英语漫画作文

线性螺丝钉的英语漫画作文The Tale of the Linear Screw.In a world where machines and devices reigned supreme, there lived a humble yet vital character known as thelinear screw. Unlike the flashy and complex mechanisms that surrounded him, the linear screw led a quiet life, content in his simplicity and purpose.The linear screw was not a flashy figure. He was not adorned with fancy gears or bright colors. Instead, he was a plain metal rod, threaded from end to end, designed tofit into a matching nut. His appearance was unremarkable, yet his importance was immense. For without him, many of the machines that powered the world would grind to a halt.The linear screw's life began in a factory, where he was forged from a single piece of metal. After being cut to the perfect length and threaded with precision, he was packaged and sent to a distant warehouse, waiting to be putto use.Days turned into weeks, and weeks into months, as the linear screw sat idly in the warehouse. He didn't mind the wait, knowing that his time would come eventually. And when it did, it would be in the service of a greater purpose.Finally, one day, the linear screw was taken from his packaging and installed into a machine. It was a momentous occasion for him, as he felt the familiar thread of the nut engaging with his own. With a click, he was securely fastened in place, ready to perform his duties.As the machine came to life, the linear screw felt a sense of accomplishment. He knew that, while he might be small and unnoticed, his role was crucial. For it was his precision threading that allowed the machine to move smoothly, efficiently, and without any hiccups.The linear screw worked tirelessly, enduring the constant motion and vibration of the machine. He felt a sense of pride as he watched the machine perform its tasks,knowing that he was a vital part of its operation.However, the life of a linear screw was not always easy. Sometimes, the machine would encounter obstacles or malfunctions, causing the screw to bear an increased load. During these times, the screw felt the strain, but he never complained. Instead, he tightened his grip, digging deeper into the nut, ensuring that the machine could continue to function.As years passed, the linear screw began to show signsof wear and tear. His threading became worn, and he no longer moved as smoothly as he once did. But even in his衰老, he refused to give up. He knew that as long as he could hold on, the machine would continue to function.One day, after years of loyal service, the linear screw finally gave way. His threading gave out, and he was no longer able to hold the machine together. With a final groan, he released his grip, allowing the machine to cometo a halt.As the machine was taken apart for repairs, the worn-out linear screw was discarded. He lay alone on the floor of the workshop, feeling a sense of sadness and regret. He knew that his days were numbered, and he would never again serve a machine.However, even in his final moments, the linear screw found a sense of peace. He knew that, while his life may have been humble and unnoticed, he had fulfilled his purpose. He had served the machine faithfully, ensuring its smooth operation for years. And for that, he felt a sense of fulfillment and pride.As the workshop door closed behind the mechanic, the linear screw lay alone in the dim light. His life, though over, had left an indelible mark on the world. And in the quiet of the workshop, his story was told, a testament to the importance of even the smallest and most overlooked parts.For the linear screw, his journey had ended. But his spirit lived on, inspiring other screws and parts tofulfill their own destinies and serve the greater machinery of life. And so, the tale of the linear screw came to a close, but his legacy lived on forever.。
互调分量 产生的条件

互调分量产生的条件英文回答:Intermodulation products (IMPs) are unwanted signals that are generated in a nonlinear system when two or more signals are present. The frequency of an IMP is a linear combination of the frequencies of the original signals. IMPs can be a significant source of interference in communication systems, as they can reduce the signal-to-noise ratio (SNR) and cause errors.There are a number of factors that can contribute to the generation of IMPs, including:The nonlinearity of the system.The power levels of the input signals.The frequency separation between the input signals.The impedance matching between the system and the input signals.The nonlinearity of the system is a key factor in the generation of IMPs. A nonlinear system is one in which the output signal is not a linear function of the input signal. This can occur when the system contains components that exhibit nonlinear behavior, such as transistors, diodes, and amplifiers.The power levels of the input signals can also affect the generation of IMPs. Higher power levels can lead to increased nonlinearity, which in turn can lead to higher levels of IMPs.The frequency separation between the input signals is also a factor in the generation of IMPs. When the input signals are closely spaced in frequency, the IMPs that are generated can fall within the passband of the system, which can cause interference.The impedance matching between the system and the inputsignals can also affect the generation of IMPs. If the impedance matching is poor, reflections can occur, which can lead to increased nonlinearity and higher levels of IMPs.There are a number of techniques that can be used to reduce the generation of IMPs, including:Using linear components in the system.Reducing the power levels of the input signals.Increasing the frequency separation between the input signals.Improving the impedance matching between the system and the input signals.中文回答:互调分量是指当非线性系统同时出现两个或多个信号时产生的不需要的信号。
LINEAR Design Note 502 说明书
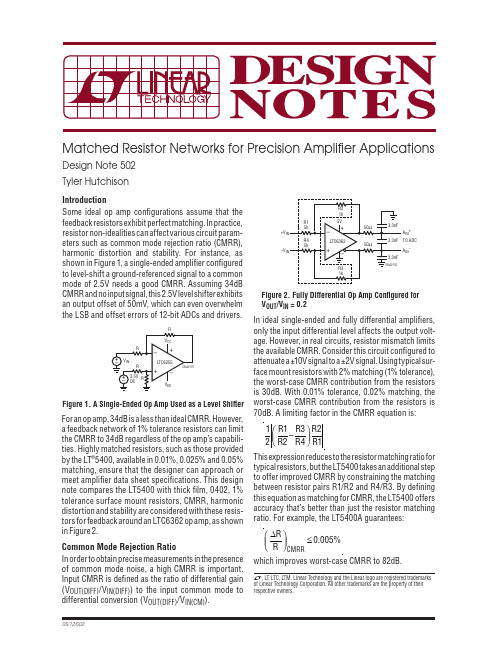
Matched Resistor Networks for Precision Amplifi er ApplicationsDesign Note 502Tyler Hutchison05/12/502IntroductionSome ideal op amp confi gurations assume that the feedback resistors exhibit perfect matching. In practice, resistor non-idealities can affect various circuit param-eters such as common mode rejection ratio (CMRR), harmonic distortion and stability. For instance, as shown in Figure 1, a single-ended amplifi er confi gured to level-shift a ground-referenced signal to a common mode of 2.5V needs a good CMRR. Assuming 34dB CMRR and no input signal, this 2.5V level shifter exhibits an output offset of 50mV, which can even overwhelm the LSB and offset errors of 12-bit ADCs and drivers.In ideal single-ended and fully differential amplifi ers, only the input differential level affects the output volt-age. However, in real circuits, resistor mismatch limitsthe available CMRR. Consider this circuit confi gured to attenuate a ±10V signal to a ±2V signal. Using typical sur-face mount resistors with 2% matching (1% tolerance), the worst-case CMRR contribution from the resistors is 30dB. With 0.01% tolerance, 0.02% matching, theworst-case CMRR contribution from the resistors is70dB. A limiting factor in the CMRR equation is:R1R2–R3R4⎞⎠⎟This expression reduces to the resistor matching ratio for typical resistors, but the L T5400 takes an additional step to offer improved CMRR by constraining the matchingbetween resistor pairs R1/R2 and R4/R3. By defining this equation as matching for CMRR, the L T5400 offers accuracy that’s better than just the resistor matching ratio. For example, the LT5400A guarantees:∆R R ⎛⎝⎜⎞⎠⎟CMRR ≤0.005%which improves worst-case CMRR to 82dB.Figure 1. A Single-Ended Op Amp Used as a Level Shifter+V –V IN +IN –Figure 2. Fully Differential Op Amp Confi gured for V OUT /V IN = 0.2For an op amp, 34dB is a less than ideal CMRR. However, a feedback network of 1% tolerance resistors can limit the CMRR to 34dB regardless of the op amp’s capabili-ties. Highly matched resistors, such as those providedby the L T ®5400, available in 0.01%, 0.025% and 0.05% matching, ensure that the designer can approach or meet amplifi er data sheet specifi cations. This design note compares the LT5400 with thick fi lm, 0402, 1% tolerance surface mount resistors. CMRR, harmonic distortion and stability are considered with these resis-tors for feedback around an L TC6362 op amp, as shown in Figure mon Mode Rejection Ratio In order to obtain precise measurements in the presence of common mode noise, a high CMRR is important.Input CMRR is defi ned as the ratio of differential gain (V OUT(DIFF)/V IN(DIFF)) to the input common mode to differential conversion (V OUT(DIFF)/V IN(CM)).L, L T , L TC, L TM, Linear Technology and the Linear logo are registered trademarks of Linear Technology Corporation. All other trademarks are the property of theirrespective owners.© LINEAR TECHNOLOGY CORPORA TION 2012dn502f LT/AP 0512 196K • PRINTED IN THE USALinear Technology Corporation1630 McCarthy B vd., Mi pitas, CA 95035-7417(408) 432-1900 ● FAX: (408) 434-0507 ● www.linear .comFor applications help,call 978-656-4700, Ext. 3741A bench test of the circuit yielded a CMRR of 50.7dB (highly resistor matching limited) with 1% tolerance resistors, and 86.6dB with the LT5400. In this case, a 2.5V common mode input would result in an offset of 1.5mV with 1% thick-fi lm resistors and an offset of 23μV with the L T5400, making it suitable for 18-bit ADC applications where DC accuracy is critical.Harmonic DistortionHarmonic distortion is also important when choosing resistors for a precision application. A large-signal voltage across a resistor may signifi cantly change the resistance depending on the size and material. This problem occurs in a number of chip-based resistors, and naturally becomes more severe as the power levels at the resistors increase. Table 1 compares the distortion of thick fi lm, through-hole, and the LT5400 resistors based on high power drive and similar power drive. The results suggest that for a given signal, the LT5400 distorts the signal much less than other resistor types.StabilityFigure 3 shows a model of the distributed capacitancebetween resistors in the L T5400. To achieve high preci-sion matching and tracking in the LT5400, many smallSiCr resistors are confi gured in series and parallel.As a result of the complex interdigitation, the LT5400 resistors can be modeled as a series of infi nitesimal resistors with parasitic capacitance between adjacentsegments and between individual segments and the ex-posed pad. In contrast, typical surface mount resistors,without the tight layout, typically exhibit signifi cantlyless parasitic capacitance.The effect of inter-resistor capacitance can be mitigated when the exposed pad is grounded. However, even after grounding the exposed pad, this capacitance stillaffects circuit stability by forming a parasitic pole on the order of the total resistance times the total capacitance.Since overshoot is inversely proportional to phase mar-gin, minimizing step response overshoot is a good way to ensure circuit stability. The uncompensated LT5400 confi guration exhibits 27% compared to 17% overshoot from the 0402 confi guration. However, the compensa-tion capacitor necessary to achieve 8% overshoot isapproximately the same in both confi gurations: 18pFwith the L T5400; 15pF with 0402 resistors. With nearlyidentical compensation, the two circuits display similarstability characteristics.Conclusion The actual performance of precision amplifi ers andADCs is often diffi cult to achieve since data sheetspecifi cations assume ideal components. Carefullymatched resistor networks, such as those suppliedby the LT5400, enable precision matching orders ofmagnitude better than discrete components, ensuringdata sheet specifications are met for precision ICs. C´EXPOSED PADEXPOSED PADDN502 F03C´t t tFigure 3. A Simple Model of the Distributed Capacitance in a Matched Resistor IC. The Sum of R ′ Components Creates an Equivalent Single Resistor . The Net Effect of C ′INTER is 1.4pF and the Net Effect of C’EXPOSED is 5.5pFTable 1. For a Given Power Level, the L T5400 Behaves More Linearly Than Other Resistor TypesSOURCE HD3–120.00AT MAX POWER (12V RMS = 56mW into 1kΩ)RESISTOR TYPEPOWER RATINGHD3 (56mW POWER)HD3 (1/14th RATED POWER)LT54000.8W –117dBc –117dBc 5% Through-Hole 0.25W –100dBc –114dBc 1% Through-Hole 0.25W –115dBc –119dBc 1206 Thick Film 0.25W –104dBc –115dBc 0805 Thick Film 0.125W –93dBc –117dBc 0603 Thick Film 0.1W –89dBc –117dBc 0402 Thick Film0.068W–72dBc–104dBc。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
system takes the form grj x ¨j + [j k, r]x ˙jx ˙ k + Cr + ∂V = 0, r = 1, . . . , n, ∂xr
j Second, λi j Pk and gij satisfy s r Pk Pt gℓs
∂λℓ r i + [ℓj, s]λℓ r − [rj, i]λs ∂q j = 0, (6)
1
Underactuated systems and the matching condition
Over the past five years several researchers have proposed nonlinear control laws for which the closed loop system assumes some special form, see the controlled Lagrangian method of [8, 9, 10] the generalized matching conditions of [11, 12, 13], the interconnection and damping assignment passivity based control of [7], the λ-method of [6, 5], and the references therein. In this paper we describe the implementation of the λ-method of [6] on a ball and beam system. For the readers convenience we start with the statement of the main theorem on λ-method matching control laws (Theorem 1). We also present an indicial derivation of the main equations. We then prove a new theorem showing that the family
− gℓi
r ℓ (∂Pt λr ) ∂qj
and (9)
λℓ r gℓi = gri
in (8) to obtain (7). To derive (6), first, differentiate (9) with respect to q j to get λℓ r ∂λℓ ∂gri ∂ gℓi r = − gℓi j . j j ∂q ∂q ∂q (10)
arXiv:math/0006121v2 [math.OC] 8 Nov 2002
Matching, linear systems, and the ball and beam
F. Andreev1,3 , D. Auckly1,4 , vi1,5 , W. White1,5 , A. Kelkar1,6
Abstract
A recent approach to the control of underactuated systems is to look for control laws which will induce some specified structure on the closed loop system. In this paper, we describe one matching condition and an approach for finding all control laws that fit the condition. After an analysis of the resulting control laws for linear systems, we present the results from an experiment on a nonlinear ball and beam system.
(7)
Ptr λℓ r
∂ gij ∂ gℓi ∂ gjℓ − Ptr λℓ − Ptr λℓ r r ∂q ℓ ∂q j ∂q i ∂gij ∂gri ∂gjr = Ptr r − Ptr j − Ptr i . ∂q ∂q ∂q
r ℓ ∂ (Pt λr gℓi ) ∂qj
(8)
∂ gℓi Use Ptr λℓ r ∂qj =
in part by NSF grant CMS 9813182 in part by NSF grant DMS 9970638
and ur is the applied actuation. To encode the fact that some degrees of freedom are unactuated, the applied forces and/or torques are restricted to satisfy Pji g jk uk = 0, where Pji is a g -orthogonal projection. The matching conditions come from this restriction together with the requirement that the closed loop 1
1 Supported 2 Supported
r = 1, . . . , n, where gij denotes the mass-matrix, Cr the dissipation, V the potential energy, [i j, k ] the Christoffel symbol of the first kind, [jk, i] = 1 2 ∂gij ∂gki ∂gjk + − ∂q k ∂q j ∂q i , (2)
r g ki Ci − g ki Ci = 0, Pk r Pk
∂V g ki i ∂q
−
∂V g ki i ∂q
(3) = 0,
r r ∂ gnm ∂ (λℓ ∂ (λℓ r Pt ) r Pt ) + gℓn + gℓm ℓ m n ∂q ∂q ∂q ℓ ∂Pt ∂Ptℓ partialgnm + +gℓn m gℓm n . = Ptℓ ℓ ∂q ∂q ∂q
for some choice of g , C , and V . The matching conditions read
ki ki r k r Γk Pk ij − Γij = 0, Pk g Ci − g Ci = 0, r Pk
+gir
r λℓ r Pt
∂λi s ℓ + [ij, r]λi s − [sj, ℓ]λr ∂q j
of matching control laws of any linear time invariant system contains all linear state feedback control laws (Theorem 2). We next present the general solution of the matching equations for the Quanser ball and beam system. (Note, that this system is different from the system analyzed by Hamberg, [11].) As always, the general solution contains several free functional parameters that may be used as tuning parameters. We chose these arbitrary functions in order to have a fair comparison with the manifacturer’s linear control law. Our laboratory tests confirm the predicted stabilization. This was our first experimental test of the λ-method. We later tested this method on an inverted pendulum cart, [3]. Consider a system of the form grj x ¨j + [j k, r] x ˙j x ˙ k + Cr + ∂V = ur , ∂xr (1)
6
Department of Mathematics, Western Illinois University, Macomb, IL 61455, USA Department of Mathematics, Kansas State University, Manhattan, KS 66506, USA 5 Department of Mechanical and Nuclear Engineering, Kansas State University, Manhattan, KS 66506, USA Department of Mechanical Engineering, Iowa State University, Ames, IA 50011, USA
Although the proof of this proposition may be found in [6], [4], and [5], for convenience, we include an k where Γij is the Christoffel symbol of the second kind, indicial notation derivation of equations (6) and (7). k Substitute equations (2), (4) for both Γk ij and Γij into k kℓ Γij = g [ij, ℓ]. (4) the first of equations (3) and multiply the result by the scalar 2 to obtain: If the matching conditions (3) hold, the control law r kℓ ∂ gℓi r kℓ ∂ gjℓ r kℓ ∂ gij − Pk g − Pk g Pk g will be given by ∂q ℓ ∂q j ∂q i r kℓ ∂gij r kℓ ∂gℓi r kℓ ∂gjℓ k = Pk g − Pk g − Pk g . ur = grk (Γk ˙ iq ˙ j + Cr − Cr ℓ j ij − Γij )q ∂q ∂q ∂q i (5) Multiply by g and use that P is self-adjoint i.e., ∂V ∂V rt + grk g ki i − g ki i . Pik gkj = gik Pjk , to get ∂q ∂q The motivation for this method is that H = 1 ˙ iq ˙ j + V is a natural candidate for a Lyapunov 2 gij q d H = −gij ci q ˙ j . Following [6], infunction because dt k troduce new variables λi = gij g jk . We have Theorem 1 The functions gij , V , and C satisfy (3) in a neighborhood of x0 if and only if