磁罗盘动态性能校准研究
磁悬浮轴承转子系统动态特性的实验研究
32
航
空
动
力
学
报
第 19 卷
图 2 转子离散化模型
F ig. 2 D ispersed m odel of the ro to r
图 3 系统传递函数框图
F ig. 3 T ran sfer function of system
表 1 各等效圆盘的质量、 极转动惯量及直径转动惯量
0103945 012469 423173 016847 117978 489158 127193 961013 1893141 611896 141432 11938 541892 646149 013353 010166
© 1994-2009 China Academic Journal Electronic Publishing House. All rights reserved.
第 1 期
谢振宇等: 磁悬浮轴承转子系统动态特性的实验研究
31
因此可采用激振实验方法, 将实际系统作为未被 完全认识的 “灰箱” , 通过对它进行激振, 分析输入 输出数据, 较准确地获得固有频率、 阻尼及振型等 [5 ] 系统的动态性能参数 , 为系统的现场运行提供 指导。 本文以某磁悬浮系统为对象, 通过激振实验 及系统的实际运行, 分析了系统的动态特性。
[1 ~ 3]
磁悬浮系统的设计是多电或全电航空发动机 的关键技术之一[ 1 ]。 鉴于航空发动机的特殊性, 在 系统实际运行前, 需要预知其动态特性, 包括临界 转速的位置、 刚度阻尼的调整对转子振动的影响 等, 以合理确定升速过程, 并采取措施避免转子在 临界转速附近运行。 由于实际系统的非线性、 磁路存在漏磁、 模型 简化时的误差等因素, 难以用分析的方法完善地 建立系统的数学模型并分析系统的固有特性[ 4, 5 ]。
罗盘校正磁偏角详细步骤

地球上任一点的磁北方向与该点的正北方向不一致,这两方向间的夹角叫磁偏角。
地球上某点磁针北端偏于正北方向的东边叫做东偏,偏于西边称西偏。
东偏为(+)西偏为
(-)。
地球上各地的磁偏角都按期计算,公布以备查用。
若某点的磁偏角已知,则一测线的
磁方位角A磁和正北方位角A的关系为A等于A磁加减磁偏角。
应用这一原理可进行磁
偏角的校正。
校正时可旋动罗盘的刻度螺旋,使水平刻度盘向左或向右转动,磁偏角东偏则向右,
西偏则向左,使罗盘底盘南北刻度线与水平刻度盘0--180度连线间夹角等于磁偏角。
经校正后测量时的读数就为真方位角。
杨四解释:
1、罗盘需要读出的数据应当为真北数据,包括通常用的GPS也是设置为真北数据。
2、地球上某点磁针北端偏于正北方向的东边叫做东偏,偏于西边称西偏。
东偏为(+)西偏为(-)。
见上图。
3、罗盘上的指针指示方向为磁北方向,一般罗盘带白点的针指向北,带磁线圈的针指向南。
4、中国除了新疆局部地方,其他地方均为西偏。
5、综上:罗盘调整时,当地磁偏角为"西偏为(-)"时,则使罗盘逆时针方向旋转磁偏角度数;反之则顺时针旋转。
所以中国大部分地区都是逆时针转动,只有新疆局部顺时针转动。
6、转动的螺丝为一字螺丝,就在罗盘侧面,转动时候看着表盘上面,在对应指针一侧(就是镜子的对面那一侧),罗盘转盘面与表面玻璃中间以一个小指针,变盘转动时候以那个小指针为准,调整转动的角度。
7、例子:以河北为例,磁偏角为“-6”,则使罗盘逆时针转动6度。
见下
河北-6 度
图:
河北-6 度。
磁罗盘的校准方法及其重要性
磁罗盘的校准方法及其重要性磁罗盘是一种常见的导航工具,它通过指示地球磁场方向来帮助人们确定方向。
然而,由于各种原因,磁罗盘可能会发生偏差,影响导航的准确性。
校准磁罗盘是一项关键的任务,以确保其指示的方向与实际方向一致。
本文将介绍磁罗盘的校准方法及其重要性。
首先,让我们了解磁罗盘的工作原理。
磁罗盘内部包含一个磁针,它可以自由地旋转,并指向地球上的磁北极。
地球的磁场是不均匀的,因此磁针可能会受到其他磁场的干扰,导致偏差。
为了确保磁罗盘的准确性,校准是必要的。
有几种常见的磁罗盘校准方法。
首先是静态校准法。
这种方法要求在一个没有磁场干扰的地方进行,例如远离金属结构或电子设备的开阔区域。
校准过程中,将磁罗盘置于水平状态,通过旋转磁罗盘,使磁针与标尺上的刻度对齐。
这样可以消除罗盘的初始误差,并确保其准确度。
另一种常见的校准方法是比较校准法。
这种方法需要使用一个已知方向的指南针来校准磁罗盘。
将指南针与磁罗盘放在一起,然后旋转磁罗盘,使指南针上的指示方向与磁针对齐。
通过这种方法,可以通过已知的准确方向来校准磁罗盘,提高其导航准确性。
除了这些常见的校准方法外,还有一些高级的校准方法可以使用。
例如,动态校准法可以在运动中进行,通过观察指南针在移动状态下的指示来校准磁罗盘。
此外,某些现代导航设备还可以使用GPS或其他定位技术来校准磁罗盘,以提高准确性。
磁罗盘的校准非常重要,因为一个准确的指南针对于导航至关重要。
无论是在户外探险还是海上航行,正确的方向都是安全和成功的关键。
如果磁罗盘没有校准,它可能会给用户带来错误的方向指示,导致迷失方向或错过目标。
此外,磁罗盘的校准还对于地图阅读至关重要。
当使用地图进行导航时,需要结合磁罗盘的指示来确定自身位置和目标方向。
如果磁罗盘没有经过准确校准,地图阅读会变得困难甚至错误。
这有可能导致错误的行进方向或迷失在陌生的地方。
在户外运动、探险和旅行中,磁罗盘通常是不可或缺的工具。
无论是远足、露营还是登山,磁罗盘都能帮助人们找到正确的方向,避免迷路或遭遇危险。
磁罗盘的精度与误差分析

磁罗盘的精度与误差分析磁罗盘是一种常用的导航仪器,用于确定方位和导航。
它通过测量地球磁场的方向来确定北方向,并结合其他导航工具如地图和望远镜来提供准确的方向信息。
然而,磁罗盘的测量结果并不是绝对准确的,因为它们可能受到各种误差的影响。
首先,磁罗盘的精度与其制造质量和设计有关。
制造商应确保磁罗盘具有良好的机械结构和高质量的磁性材料。
制造过程中的不良材料或生产错误可能导致指示不准确的结果。
因此,选择一个知名的制造商并购买质量可靠的磁罗盘是很重要的。
此外,环境条件也会对磁罗盘的精度产生影响。
磁罗盘应该在无风的条件下使用,并要远离电子设备、大型金属物体和其他可能干扰地球磁场的物体。
这些干扰源可能会引起磁罗盘的指示偏离,并导致不准确的方向测量。
因此,在使用磁罗盘之前,应该仔细考虑周围环境,并尽量消除潜在的干扰。
另一个影响磁罗盘准确度的因素是外部磁场的干扰。
地球上的磁场并不是均匀的,而且可能会受到其他物体或地理特征的影响。
例如,附近有大型岩石或金属物体可能会扭曲附近的磁场,从而影响磁罗盘的指示。
在这种情况下,使用磁罗盘的精度就会受到限制。
为了减小这种误差,使用磁罗盘时应避免靠近这些干扰源,并了解附近地理特征的可能影响。
除了外部干扰,磁罗盘本身也可能存在一些内部误差。
例如,磁罗盘的刻度盘或指针可能存在误差,导致测量结果的偏离。
为了减小这些误差,磁罗盘制造商通常会在生产过程中进行校准,以确保其准确性。
此外,使用磁罗盘时,使用者应确保仔细读取并准确解读刻度盘上的指示。
最后,使用者自身的技能和经验也会对磁罗盘的准确性产生影响。
正确的使用技巧和解读能力是确保测量结果准确的关键。
使用者应该接受相关的培训和指导,以熟练掌握使用磁罗盘的方法和技巧。
此外,在实际使用中,使用者还应注意消除人为误差,如身体姿势和手持稳定等方面的因素。
总体而言,磁罗盘的精度主要取决于其制造质量和设计、环境条件、外部磁场干扰、内部误差以及使用者的技能和经验。
磁罗盘动态性能校准研究

^
~ 1 事
~
曲 线
—
f n 琏 琦s O ^ ; 恤 曲牲
2 . 校准 方法和校 准原理 洲 P 动 态 性 能 校 准 是 利 用 三 轴 无 磁 转 台模 i 0 d 一 一 , 拟磁 罗 盘 的运 动 状态 ,以转 台 的实 时角 度 为 标 准 ,在 匀速 转 动和 匀加 速 转动 的状态 下 , 图2静止状态示值误差曲线 对 磁 罗盘 的 方位 角输 出精 度 进 行校 准 。将 被 检 磁 罗盘 安 装在 三 轴 无磁 液压 转 台 的工 作 如 图2 所示 ,在静态 状态 下,磁罗 盘 的零 区安 装面 上 ,三 轴无 磁 液压 转 台产 生磁 罗 盘 偏 为0 。 ,方位 角 均方 根误 差 为0 . 1 7 。 ,通 用磁 动 态 校准 所 需 的运动 状 态 :磁 罗盘 在运 动 过 罗盘的均 方根 误差值 要求不超 过0 . 5 。 。 程 中输 出的 方位 角数 据 同步 传输 到控 制系 统 中 ,与三 轴 无磁 液压 转 台 的运 动数 据 进行 同 步 数 据处 理 ,实 现磁 罗 盘 的静 态性 能 校准 、 动 态 性 能 校 准 。三 轴 无 磁 液 压 转 台 如 图 1 所
J 喜 ( 一
式 中 ,A a —— 磁罗 盘 方位 角动 态示 值 的均方 根误差 , ( 。 )。 3 . 磁 罗盘方位 角动 态指标 测量 磁 罗盘 采 用通 用数 字 磁罗 盘 , 内部磁 传 感 器采 用磁 阻传 感器 …,在 静 态情 况 下示 值 误 差可 以达 到O . 5 。 ,测 量 过程 中每 隔 1 5 。 采集 个点 ,转 动 一 圈共采 集 2 5 点 ,磁罗 盘 数据 和 转 台的角 度 同步 采集 ,计 算磁 罗盘 的 示值 误 差和 方位 角 均方 根 误差 ,并画 出示 值 误差 曲线 。磁罗 盘 安装 载体 的转 动角 度速 度 一般 不超 过5 O 。 / s ,因此 主要 校准 磁罗 盘 在静 止状
磁罗盘校准方法

磁罗盘校准方法
磁罗盘校准的方法可以分为以下几种:
1. 静态校准方法:将磁罗盘置于一个已知方向的磁场中,并将磁罗盘的指针对齐到该方向,达到校准的目的。
可以使用一个磁铁或者一个已知磁场强度的磁铁来进行校准。
2. 动态校准方法:将磁罗盘旋转360度,这样可以根据磁场的变化来校准磁罗盘的指针指向。
这种方法可以消除磁罗盘中的误差和漂移。
3. 复位校准方法:将磁罗盘复位到初始状态,通过按下复位按钮或者根据设备说明书中的方法来进行校准。
这种方法适用于一些数字或者电子磁罗盘。
4. 软件校准方法:通过使用特定的磁罗盘校准软件来进行校准。
这些软件一般提供了一系列的步骤和指导来帮助用户完成校准过程。
需要注意的是,校准磁罗盘时需要将磁罗盘远离磁场干扰源,例如电子设备、电缆等,以确保测量的准确性。
此外,校准的频率也取决于具体使用的磁罗盘和需要的精度。
一般来说,校准的频率可以根据设备的要求或者实际情况来决定。
论磁罗盘校准方法的改进
(下转第 169 页)
232 广东科技 2013.4. 第 8 期
库”等违法违纪行为。
3.6 加强货币资金控制
岗位应相互分离、相互制约,保护资金安全、完整;实施流 程控制,资金支付业务应当经过完整流程;建立资金盘点和银 行对账制度,保证资金账户明晰;杜绝白条抵库、公款私存、出 租出借银行账户等违法违纪行为。
3.7 加强固定资产控制
加强计划管理,固定资产购建必须提前纳入计划和预算, 以计划和预算作为购建依据;完善项目决策,提高固定资产购 建决策的科学性、合理性;明确保管责任,实施固定资产使用和 保管责任到人;加强权属管理,实施定期盘点,规范移交和处置 行为,实现固定资产管理与财务管理相结合,做到账务清晰、账 实相符。
研究园地
论磁罗盘校准方法的改进
张权力
(中航飞机汉中分公司试飞厂,陕西汉中 723213)
摘 要:着重阐述校准罗盘安装误差和半圆罗差的原理与改进前后的校准方法及其效果。 关键词:罗盘;罗差;校正
运 8C 出口型飞机上,应急磁罗盘更换型号以后,误差精
度要求由原来的±5°改为±2°,按校准文件的要求先将飞机转
3.9 强化高速公路企业内部控制的内部监督
在进行高速公路企业的内部控制制度进行设计时,可能会 由于一些原因,如考虑不周、认识的局限,使得高速公路企业设 计出来的内部控制制度不是很完善,存在很多的不足。另外,在 对公路企业内部控制制度进行执行的过程中,也会因为一些原 因,如企业员工没有对内控制度有着全面的认识或者理解上产 生一定的差异又或者一些实际情况的发生,使得设计出来的内 部控制制度没有能够对自身的作用进行很好的发挥,使得在内 部控制制度运行的过程中产生着一些问题。所以,必须加强对 高速公路企业内部控制制度的运行情况进行必要的监督和管
磁罗盘的误差分析及补偿
2 磁罗盘方向测量误差分析 导致磁罗盘方向测量系统产生误差的
因素很多,但是 总的来说可以分为两类:一 是 测 量 环 境 和 铁 磁 材 料对磁 传感 器所感 测 的局 部 地 磁 场 的 影 响;二 是 测 量 系 统自身 存 在 的 误 差。磁 干 扰可细 分 为 硬 磁 干 扰 和 软 磁 干 扰,硬 磁 干 扰 就 是 磁 罗盘 上 的永 久 磁 铁 或 磁 化钢 形成 的 磁 场,软 磁 干 扰 就 是 由于 软 磁 材 料本 身并不 产生 磁 场,但有 时 因为其导磁率较高从而使得其所存在的环 境 的 磁 场 强度 分布发 生畸 变。如 果 软 磁 材 料尺寸 相 对 较 大 或 者 距离 磁 罗盘较 近 时, 就 会 对周围 地 磁 场产生 影 响,从 而 导 致 磁 罗盘 对 地 磁 矢 量 的 检 测出现偏 差,影 响 磁 罗盘 的 方位 解 算。仪 表误 差 就 是由多轴 磁 传感 器 的 非正交 安 装、零 位 和灵 敏 度 等 不 同 而引起 的 误 差。零 位 误 差 是因传感 器、 模拟电 路和A/ D转换的零点不为零而引 起 的。灵敏 度 误 差实 际上 就 是由于 传感 器 的灵敏度和电路放大倍数等的差异而引起 的。在 很 多 磁 罗 盘 方 向 测 量 实 验 当中,磁 罗 盘 的 精 确 度并不是 非 常 的 精 确,因为 影 响 磁 罗 盘 方 向 测 量 的 因 素 很 多,而 且 只有 在 理 想 情况下,磁 罗 盘 方 向 测 量 才是 准 确 的。
3 磁罗盘方向测量误差补偿 基于磁罗盘以地磁场为基础的工作原
理,针对 传 统 的 磁 罗盘 校 准 时 容 易 受 到 外 界 干 扰、标 定 校 准 等诸多因 素 的 影 响 而出 现 的 误 差,很 多 学 者 都 提 出了对 于 磁 罗盘 测 量 误 差 的 校 准 方 法。一 般 来说,对 于 磁 罗盘 方向测 量首先 都 会 建 立 数 据 模 型,通 过 建 立一 个用 矩 阵 方 程 描 述 的 磁 罗盘 方位 指 向 输出的 精 确 测 量模 型,根 据 数 据 模 型 的各因素影响程度大小来改变不同标量 和 矢 量,通 过 建 立 起 来 的 数 据 模 型中的公 式 ,得 出 磁 罗 盘 方 向 测 量 的 解 算 值,从 而 得 到 不 同 的 结 果,我们 会 发 现 解 算值 的 最 终 结 果 都 会 随 着 参 数 的 不 同 而 产生一定 的 误 差。然 而 通 过 这 些 实 验 证明了目前广 泛 使 用的几 种罗盘 指 向解 算 模 型 仅 是 上 述 精 确 测 量 模 型 在 不 同 特 定 条 件下 的 简 化 或 泛 化,并 没有 真 正 意 义 上 的另辟 蹊 径,找 到 真 正 解 决 解 算 测 量 误 差 的 方 法。若 要真正 的
磁罗盘校准方法

磁罗盘校准方法磁罗盘校准是指对航空器或船舶等装备上的磁罗盘进行校准调整,以确保其指向准确并且与真北方向一致。
磁罗盘是一种使用磁感应原理指示地球磁场方向的仪器,但由于各种外界因素的干扰,磁罗盘指示的方向可能偏离真北。
因此,在使用磁罗盘进行导航或定位时,进行校准是必不可少的。
磁罗盘校准的目的是调整磁罗盘的磁轴与真北方向一致,以及去除干扰因素对其指示的影响。
下面将介绍一些常用的磁罗盘校准方法。
1.无磁场校准方法:这是一种简单而常用的磁罗盘校准方法。
首先找到一个无磁场的环境,例如远离大型金属物体的开阔地带。
将磁罗盘放置在水平的表面上,静置一段时间,直到磁罗盘指针稳定不动。
然后旋转磁罗盘,将指针调整到标示北方的刻度上。
如此反复多次,直到得到相同的指向。
2.磁光法校准方法:这种方法使用磁感应数据和光感应数据相结合的方式进行磁罗盘校准。
通过测量磁感应数据和相应的光感应数据,可以建立一个校准模型,用于校准磁罗盘。
该方法的优点是减小了外界因素的干扰,提高了校准的准确性。
3.磁介质校准法:这种方法使用特殊的磁介质材料对磁罗盘进行校准。
首先,将磁介质放置在一个无磁场的环境中,然后将磁罗盘置于磁介质上。
根据磁介质的特性和磁罗盘的指示,调整磁罗盘,使其与磁介质对应指示的方向一致。
4.磁纠刺校准法:这种方法通常用于航空器上的磁罗盘校准。
它使用一个称为磁纠刺的装置对磁罗盘进行校准。
磁纠刺是一个可以在航空器上静止或旋转的装置,它产生一个已知方向的磁场。
通过调整磁罗盘,使其指示与磁纠刺指向的方向一致,完成校准。
5.磁罗盘校准软件:除了上述传统的校准方法,现代化的磁罗盘校准主要依赖于磁罗盘校准软件。
这种方法通过将磁罗盘和GPS数据结合起来,利用高精度的磁感应和GPS数据进行校准。
校准软件可以根据实时数据进行自动校准,不仅提高了校准的准确性,还节省了时间和劳动力。
以上是一些常用的磁罗盘校准方法。
在进行磁罗盘校准时,需要注意的是选择合适的环境,避免磁场干扰。
磁罗盘误差分析与校准
全 面校 准 磁 罗盘 方 位 指 向 的方 法 和步 骤 ; 后 用 实 例 检 验 并 比较 了 采 用 椭 圆拟 合 模 型 和 精 确 测 量 模 型 对 罗 盘 方 位 解 算 的效 最
sr me tg su e o g tt e p r mee so h r p s d me s r me tmo e .Co tu n e t r st e h a a t r ft e p o o e a u e n d 1 mpr h nsv to sa d c n iin e e i e meh d n o d t s o
Ab t a t a e n t e f n a na r c p eo g ei o a s a d f co st a a s sit r r n e a d i sm— sr c :B s d o h d me tl i i l f u p n ma n t c mp s , n a tr h t u e e e e c n n t c c n f
t r o t x e u to o g e i o a s o t u a a wa e u e rt Pr os we e gv n s o n h tt e e m fmar q ai n f r ma n t c mp s u p td t s d d c d f s . o f r ie h wi g t a h i c i
m e te r r ih af ce a n t a i n ro s wh c fe t d m g e i zmut e s r me t c u a y, a p e ii n zmut e s r me t mo e n c h m a u e n a c r c r c so a i h m a u e n d l i
一种小型无人机动态磁罗盘校准方法评估
Technique and application I技术应用
当地磁偏角P后 ,可根据如下公式计算得 到飞机的真北航
图 1中 虚 线 为 理 想 测 量值 ,实 线 为 实 际测 量 值 。(a)
向角 :
表示 c,每个轴测量放大 比例不完全P
(3) 量零偏和6 硬磁干扰 ;c)Emaf表示不同测量轴不能保证
感 应 强 度 (B), 代 表 轴 方 向 分量 。对 于 三轴 磁 罗 盘 , 一 般不 能等效 为水平 放置 ,因此需要 考虑俯 仰角0和滚 转角
的影 响。考虑到 标准 本体 坐标系到 导航坐 标系 的变换 , 结合公式 (1),最终三轴磁罗盘航 向角计算公式为:
合方法 ,但是对操作要求较高,实际应用中很容易因为地 磁方 向的偏差 和 操作 失误 ,造 成校 准结 果 偏差 较大 ,导 致
难在外场找到高精度航 向基准 ;第二类方法则会大大增加 系统 成本 ;第 三类 方 法 中的椭 圆 (球 )拟 合法 以其 能在 完 全不增加成本 的情况下实现高精度的校准 ,得到了广泛的 应用 。
小型 无人 机 由于旋 转方 便 ,可 以很方 便 的实现 椭 圆拟
= 一 arctan
其中口;代表飞机在机体坐标系下测量的Y轴方向的磁
一 般 小 型无人 机 飞行距 离 较近 ,磁偏 角不 会 在飞 行过 正交 。
程中发生明显变化 ,因此该变量可以看作常量 ,由于其变 化产 生 的误差 不做 进一 步 分析 。
2校准误 差分析 由于磁 罗 盘 在 实 际 使 用 过 程 中会 受 到 一 系 列 不 同类 型 的误 差 引 起 的 干 扰 ,从 而 造成 测 量结 果 出现 一 定 的偏
的小 型无 人机 中得 到 了非 常广 泛 的应 用 翻。
一种磁罗盘的校准装置[实用新型专利]
![一种磁罗盘的校准装置[实用新型专利]](https://img.taocdn.com/s3/m/93b9d512770bf78a64295483.png)
专利名称:一种磁罗盘的校准装置
专利类型:实用新型专利
发明人:侯朝焕,马晓川,朱昀,马慧,刘宇,司昌龙,朱晓萌申请号:CN201220605308.5
申请日:20121108
公开号:CN203083573U
公开日:
20130724
专利内容由知识产权出版社提供
摘要:本实用新型提供了一种磁罗盘的校准装置,包括台面、台体,无磁电机、电机驱动器,台体和旋转台面通过轴连接,电机驱动器驱动无磁电机,带动台面旋转;所有部件均为无磁。
另外还包括寻北装置。
优选的无磁电机采用超声波电机。
优选的轴采用陶瓷轴承。
本实用新型能够满足无电或有电情况下磁罗盘的校准,而且整个装置体积小、重量轻、易于携带。
申请人:中国科学院声学研究所
地址:100190 北京市海淀区北四环西路21号
国籍:CN
代理机构:北京法思腾知识产权代理有限公司
更多信息请下载全文后查看。
电子罗盘的工作原理及校准
ST集成传感器方案实现电子罗盘功能电子罗盘是一种重要的导航工具,能实时提供移动物体的航向和姿态。
随着半导体工艺的进步和手机操作系统的发展,集成了越来越多传感器的智能手机变得功能强大,很多手机上都实现了电子罗盘的功能。
而基于电子罗盘的应用(如Android的Skymap)在各个软件平台上也流行起来。
要实现电子罗盘功能,需要一个检测磁场的三轴磁力传感器和一个三轴加速度传感器随着微机械工艺的成熟,意法半导体推出将三轴磁力计和三轴加速计集成在一个封装里的二合一传感器模块LSM303DLH,方便用户在短时间内设计出成本低、性能高的电子罗盘。
本文以LSM303DLH为例讨论该器件的工作原理、技术参数和电子罗盘的实现方法。
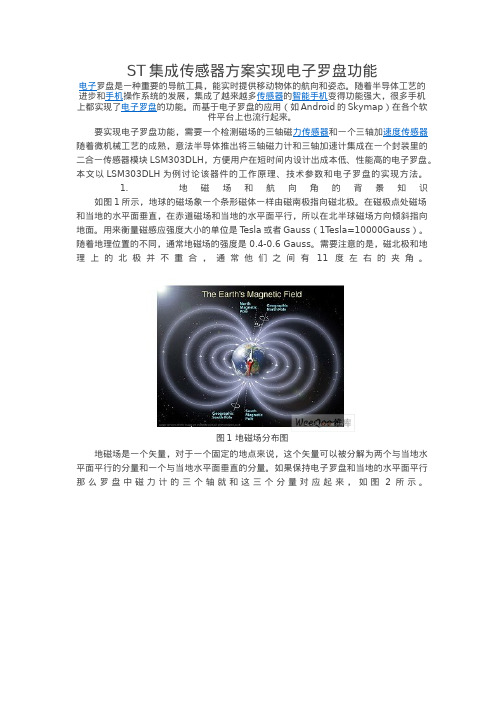
1. 地磁场和航向角的背景知识 如图1所示,地球的磁场象一个条形磁体一样由磁南极指向磁北极。
在磁极点处磁场和当地的水平面垂直,在赤道磁场和当地的水平面平行,所以在北半球磁场方向倾斜指向地面。
用来衡量磁感应强度大小的单位是T esla或者Gauss(1T esla=10000Gauss)。
随着地理位置的不同,通常地磁场的强度是0.4-0.6 Gauss。
需要注意的是,磁北极和地理上的北极并不重合,通常他们之间有11度左右的夹角。
图1 地磁场分布图 地磁场是一个矢量,对于一个固定的地点来说,这个矢量可以被分解为两个与当地水平面平行的分量和一个与当地水平面垂直的分量。
如果保持电子罗盘和当地的水平面平行那么罗盘中磁力计的三个轴就和这三个分量对应起来,如图2所示。
图2 地磁场矢量分解示意图 实际上对水平方向的两个分量来说,他们的矢量和总是指向磁北的。
罗盘中的航向角(Azimuth)就是当前方向和磁北的夹角。
由于罗盘保持水平,只需要用磁力计水平方向两轴(通常为X轴和Y轴)的检测数据就可以用式1计算出航向角。
当罗盘水平旋转的时候,航向角在0?-360?之间变化。
2.ST集成磁力计和加速计的传感器模块LSM303DLH 2.1 磁力计工作原理 在LSM303DLH中磁力计采用各向异性磁致电阻(Anisotropic Magneto-Resistance)材料来检测空间中磁感应强度的大小。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
磁罗盘动态性能校准研究
【摘要】介绍了数字磁罗盘动态性能测量原理、测试方法。
通过校准磁罗盘静态和动态状态下的方位角的示值,计算出磁罗盘的零偏和方位角均方根误差,研究在动态性能下方位角示值的变化,为磁罗盘在动态状态下应用提供校准数据,从而提高磁罗盘的方位角测量精度。
【关键词】数字磁罗盘;方位角;动态性能
1.引言
数字磁罗盘[1]被广泛应用于国防军工系统的各个行业,包括船舶、航空、航天、兵器等领域。
在太空中,磁罗盘可以用于卫星姿态的控制;在装甲车辆和水面舰艇上,磁罗盘作为GPS导航系统的补充,当GPS导航系统失效时用于导航;在导弹发射系统中,磁罗盘用于发射准备前方向角度的定位;在各类军用作战飞机上,磁罗盘用于各种飞行姿态的测量;在水下航行器上,磁罗盘用于水下导航及航行姿态的测量;在水雷、鱼雷上,磁罗盘用于定向攻击的导航手段之一;在港口防护、水下物理场测试中,磁罗盘用于水下方向定位,除国防军工系统外,磁罗盘在其他行业也有广泛应用,如在石油系统中,磁罗盘用于油井方向的测量;在越野车、各类民船中,磁罗盘被用于导航;在海洋环境检测中,磁罗盘用于水下方向定位。
生产厂家一般只提出了磁罗盘的静态技术指标,在实际使用中,磁罗盘的输出响应一般存在滞后现象,特别是在运动状态,磁罗盘的角度输出值有时不能很好的反映其当前状态,本文测量了磁罗盘静态性能[2]指标、动态性能[3]指标,并比较在静态和动态技术指标的不同,测量的数据为磁罗盘在实际应用中进行修正提供可靠的数据,提高磁罗盘的测量精度。
2.校准方法和校准原理
动态性能校准是利用三轴无磁转台模拟磁罗盘的运动状态,以转台的实时角度为标准,在匀速转动和匀加速转动的状态下,对磁罗盘的方位角输出精度进行校准。
将被检磁罗盘安装在三轴无磁液压转台[4]的工作区安装面上,三轴无磁液压转台产生磁罗盘动态校准所需的运动状态;磁罗盘在运动过程中输出的方位角数据同步传输到控制系统中,与三轴无磁液压转台的运动数据进行同步数据处理,实现磁罗盘的静态性能校准、动态性能校准。
三轴无磁液压转台如图1所示。
表1列出了不同角速度的磁罗盘示值零偏和方位角均方根误差,通过对磁罗盘的动态性能的测量,并与其静态性能进行比较,低速运动状态(转动角速度小于1o/s),磁罗盘方位角的示值误差与方位角均方根误差保持一致,在速度达到5o/s时,磁罗盘的零偏变大,需要进行角度修正,方位角均方根误差仍然满足要求。
当大于10o/s高速状态时,零偏随着角速度的增加偏差变大,方位角均方根误差超过0.5o。
4.结束语
通过磁罗盘的动态性能测量,并与静态性能进行比较;当在低速状态下,角速度不大于1o/s时,与静态性能一致;当角度达到5o时,技术指标能够满足磁罗盘的要求,但必须进行角度修正,当角度在10o/s~50o/s时,磁罗盘需要进行角度修正和误差分析[9]。
磁罗盘的方位角随着角速度增加,磁罗盘的示值响应变差,方位角均方根误差增加。
磁罗盘动态性能的校准可以为使用中的磁罗盘提供理论和试验数据,从而对磁罗盘的测量数据进行修正和误差分析,提高磁罗盘的测量精度。
参考文献
[1]李怡达,张中平,秦明,黄庆安.基于磁阻传感器与微处理器的二维磁电子罗盘的设计[J]. 功能材料与器件学报,2008,14(2):557-560.
[2]蒋浩宇,富立,范跃祖.基于OEM板的GPS罗盘设计[J].航天控制,2005,23(4):83-86.
[3]俞阿龙,黄惟一.加速度传感器的动态性能校正技术[J].测控技术,2004,23(7):5-7.
[4]苏建红.无磁转台用液压连续回转马达伺服系统的设计与实现[D].上海:上海交通大学,2008.。