从飞思卡尔SafeAssure功能安全保障方案看汽车安全设计概要
从飞思卡尔SafeAssure功能安全保障方案看汽车安全设计概要

从飞思卡尔SafeAssure功能安全保障方案看汽车安全设计就在您阅读完本文不到十分钟的时间内,全球大概有超过二十人已经因为车祸离开这个世界,而其中大约有90%是来自像中国这样的发展中国家(数据参考世界卫生组织统计。
汽车造福人类的同时,在全球科技空前发达的今天,因为交通事故带来如此重大的公共安全威胁不啻为人类的一大悲剧。
从汽车诞生开始,人们就没有停止过对汽车安全驾驶的追求。
最早的安全带以及后来的安全气囊等被动安全措施挽救了数千万人的生命,后来发展起来的ABS(防抱死制动系统、ESP(电子稳定程序、EBD(电子制动力分配系等主动安全功能让汽车安全性再次大大提高。
但尽管如此,交通事故依然是最大非自然死伤原因之一。
图1 世界卫生组织统计:全球每年因交通事故死亡130万人,并有5000万人受伤“随着系统复杂性的提高,以及软件和机电设备的大量应用,因为系统失效和随机硬件失效导致的交通事故风险也日益增加。
因此,近年开始出现了新的汽车安全概念——安全性预测。
”在近日召开的“2012产业和技术展望媒体研讨会”上,飞思卡尔亚太区汽车及工业解决方案事业部全球产品市场经理郗蕴侠(Yolanda博士指出,“安全性预测即汽车里的一些系统能实时检测故障,在故障发生之前就能预警防止故障发生,这就是当前大家倡导的汽车功能安全的概念。
”为此,飞思卡尔推出了命名为“SafeAssure”的安全保障方案,旨在帮助系统制造商更加轻松地满足汽车和工业市场中的功能安全标准要求,并大大降低开发难度、缩短开发周期。
图2 汽车安全系统的演变——基于安全性预测的功能安全出现从IEC61508到ISO 26262,看汽车功能安全演变 2011年11月推出ISO 26262之前,汽车行业遵照的功能安全标准是电子、电气及可编程器件功能安全基本标准IEC 61508。
然而,作为一种通用基础安全标准,对于汽车行业的特殊性而言,该标准有很多的不足,特别是近年来汽车系统的复杂性日益增长的条件下。
飞思卡尔针对功能安全标准优化产品为客户提供更优选择

针 对 安 全 要 求 严 苛 的 应 用 。设 计 法 。双核MC U以更具性价 比的价格实 工 程 师 需 要 进 行 架 构 选 择 。但 现 有 的 现 车 辆 安 全 。
高性能e O z d 2 O 4 双核处理器
.
3位 P w r 2 o e 架构 微 控 制 器 核 心频 率高 达 10 2 MHz 双 核 5 流 水 线 级
R^^ 能 兀动
.
18K R M ,具有错误纠正 2 BS A
功能(c ) E c
符合SI3, L 标 准的安全理 L ASID 念 :双核锁步模式和故 障安全保护
I
l 8 ・ l 3 重号庄品t幂
21. 、 - p c m. l 0 2 ^ v e w. c 3 , e 、 o r
内应用 。以确保 车辆 电子 系统充 分的
飞思卡 尔针对要求严格 的安全 应 防止以往 因系统孤 立无援而瞬 间停止
安全性 。该 IO文档定义 了4 S 个车 辆安 用 ,推 出 了新 开 发 的 汽 车 级 双 核 微 控 运行 的惰 况 。
C 6 3 o e 全完整性 等级 ( I ) ASL ,其中A I SLD代 制 器 。双 核 MP 5 4 LP w r
需 要多方 面的评估 微控制器 方案 。飞 核 概 念 ,并 让 用 户 在 性 能 和 安 全 水 平 思卡尔 目前实现功 能安全 的途径包 括 之 间 取 得 平 衡 :同 时 能 够 形 成 一 个 符
合 SL / SLD 标 准 的 安 全 概 念 。并 I3 A I
误检测代码功能
பைடு நூலகம்
制造商 更加轻松 地满足 汽车和工 业市 每 个 通 道 由 一 个 内核 、 总 线 、
实现汽车功能安全合规性
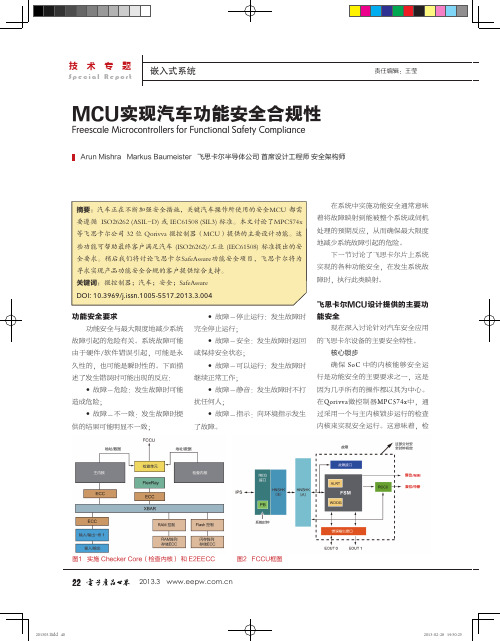
图1 实施 Checker Core(检查内核) 和 E2EECC图2 FCCU框图2013.322(E2EECC) 保护在海明间距为4 的情况下实现ECC(纠错码)和 SECDED(单纠错和双纠错),可保护所有的存储器存储操作。
ECC 在数据、地址信号上实现,并通过写操作与数据一起存储在存储器中。
发起读操作时,ECC 在检索到的数据和请求的地址上重新进行计算,并通过已存储的 ECC 进行验证。
在Qorivva MPC574x器件中,没有仅用于存储器的ECC,但它提供了当发生可纠正(单位或不可纠正(多位)的错误时,MEMU 都会收到一个错误信号,然后记录错误地址,设置相应的错误标记并报告给FCCU。
在需要特殊更正数时或进一步分析软件中这样的错误时,可以使用。
故障收集和控制单元(FCCU)FCCU是一个可编程的单元,监控MCU的完整性状态,提供灵活的安全状态控制,在设备发生故障时通过可控的方式使设备处于安全状态。
收CPU 的干预。
足够的覆盖率,可满足所要求的系统安全完整性等级(SIL)。
1. 在 STCU 重置事件后,SSCM检测到设备自我检测尚未运行。
2. SSCM 从非易失性闪存存储器(NVM) 读取自我检测参数。
3. SSCM 将自我检测参数加载到STCU 中,并将控制传送到 STCU。
4. STCU 管理 MBIST 并更新其内部状态。
5. STCU 管理 LBIST 并更新其内部状态(可能有其他LBIST和MBIST的图3 系统启动过程中 STCU 的运行图4 CMU简易框图图5 飞思卡尔质量基础飞思卡尔 SafeAssure 计划飞思卡尔SafeAssure功能安全计划旨在帮助系统制造商更轻松符合国际标准组织(ISO)26262和国际电工委员会(IEC)61508功能安全标准。
该计划强调飞思卡尔解决方案(硬件和软件),优化了设计,支持功能安全实施,同时集成了丰富的支持。
飞思卡尔方案包含四个支持领域,可使客户大大减少产品上市周期。
飞思卡尔ISO26262 ASIL-D电子助力转向演示系统方案_官方技术文档
飞思卡尔ISO26262 ASIL-D电子助力转向演示系统方案1. 概述汽车电子助力转向系统(EPS)可以降低能耗,提高驾控智能水平,且更容易与其它高级安全系统集成,因而近年来在汽车中得到了大力的推广和发展。
在这个领域,国内EPS供应商与国外供应商的主要差距体现在EPS控制技术和系统安全设计两方面。
飞思卡尔半导体公司在2011年推出了“采用永磁同步电机的汽车电子助力转向电控单元解决方案”,旨在帮助国内EPS供应商掌握永磁同步电机的控制技术。
这一方案获得了《世界电子元器件》期刊“2012年全国优秀IC和电子产品解决方案”最佳方案奖。
在2012年的飞思卡尔中国技术论坛上,飞思卡尔又推出了针对道路车辆-功能安全国际标准ISO26262 ASIL-D等级的EPS演示系统方案。
该方案不仅演示了采用飞思卡尔功能安全品牌SafeAssureTM的软硬件产品,如何方便快捷地实现ASIL-D级别的EPS系统,同时也提供了整个开发阶段所涉及的安全设计文档,包括:•项目定义•危险分析和风险评估•功能安全概念•系统开发•安全确认。
1本文将根据图1所示的ISO26262安全生命周期模型来阐述飞思卡尔如何根据ISO26262规范来开发ASIL-D等级的EPS演示系统。
2.功能安全概念设计在概念阶段设计项目(或产品)定义、危险分析和风险评估和功能安全概念。
2.1 项目定义项目定义描述了EPS系统的主要功能,如下所述:• 根据司机意图,提供转向支持• 主动回正• 向车内其它系统提供转向角度(通过CAN网络)2.2 危险分析和风险评估2危险分析和风险评估需要考虑的要素有:安全功能、失效模式、驾驶场景、严重性、暴露的可能性、可控性以及安全目标、ASIL等级、安全时间和安全状态。
根据分析,EPS系统有如下危险分析和风险评估结果:• 安全目标1:防止电机产生自主扭矩确保电机不能自主产生扭矩,这样会使车辆转向偏离司机意图。
尤其在高速时,这种扭矩会产生意外的转向,给司机乘客和行人带来危险。
“飞思卡尔”智能汽车系统设计
作为最为普遍的交通工具之一 , 汽车与人们的生活息息相关。 一旦智能汽 车得到普及势必会走向量产化, 而在智能汽车普及之前应该制定出相关的设计 标准作为智能汽车的标杆。 智能汽车系统所包含的内容甚多, 如信息控制、 系统 结构、 数据采集、 系统数据库等方面都属于智能汽车系统所涵盖的范畴, 如果没 有统一的标尺, 则会让各个模块之间出现很大的差异化, 这样就会带来一系列 的问 题, 同时也会让智能汽车的构建变得繁琐、 复杂。 通过制定出 统一的标准 , 让系统兼容性得以保证的同时让整个智能汽车系统设计更加规范, 从而带动智 能汽车产业的发展[ 1 】 。
1 . 2 控制模 块
控制系统是智能汽车系统重要的组成部分 , 是实现人机交互的关键。 从当 前的汽车控制来看还是不能离开人工操作 , 只有在驾驶员存在的情况下才能保 证汽车的正常工作。 在驾驶的过程中, 如果时间较长则会给驾驶员带来极大的 疲劳感, 这样就 间接带来了交通事故隐患。 而在智能化汽车将能够摆脱人工操
科 学论 坛
l 蕾
C h i n a s c i e n c e a n d T e c h n o ] o g y R e v i e w
“ 飞 思卡 尔 ” 智能 汽 车 系统 设 计
王贯 安
( 中南大学 湖南 长沙 4 1 0 0 1 2 )
[ 摘 要] 随着 科 技的进 步 , 汽 车产 业也 发生 了翻天 覆地 的变 化 。 在计 算机 技术 、 网络技术 、 电子 技术等 高端 技术 的推动 下 , 智 能汽车 得到 了实 现 , 相信 随着 时 间的推移 。 智能汽车也将有着更加广阔的发展空间。 要让汽车实现智能化, 智能系统设计是十分重要的一个环节。 本文对智能汽车系统进行了综合性的阐述 , 并以 “ 飞思卡尔智” 能汽车比赛对智能汽车系统设计进行了探讨。 [ 关键 词] 飞思 卡 尔 智 能 汽车 系统 设计 中图分类号 : D4 1 2 . 3 文献标识码 : A 文章编号 : 1 0 0 9 - 9 1 4 X ( 2 0 1 4 ) 0 1 —0 2 2 4 一 O 1
飞思卡尔赛车与机器视觉设计方案

飞思卡尔赛车及机器视觉设计方案第1章飞思卡尔赛车及机器视觉的概述1.1 智能车的研究背景1.1.1 智能车的发展历史1953 年,美国 Barrett Electric 公司制造了世界上第 1 台采用埋线电磁感应方式跟踪路径的自动导向车,也被称作“无人驾驶牵引车”。
20 世纪 60 年代和 70 年代初,AGV 仍采用这种导向方式。
但是,20 世纪 70 年代中期,具有载货功能的 AGV 在欧洲得到了应用并被引入到美国。
这些自动导向车主要用于自动化仓贮系统和柔性装配系统的物料运输。
在 20 世纪 70 年代和 80 年代初,AGV的应用领域扩大而且工作条件也变得多样化,因此,新的导向方式和技术得到了更广泛的研究与开发。
在最近的 10-15 年里,各种新型 AGV 被广泛地应用于各个领域。
单元式 AGV主要用于短距离的物料运输并与自动化程度较高的加工设备组成柔性生产线,除此以外,AGV 还用于搬运体积和重量都很大的物品,尤其是在汽车制造过程中用多个载货平台式 AGV 组成移动式输送线,构成整车柔性装配生产线。
最近,小型 AGV 应用更为广泛,而且以长距离不复杂的路径规划为主。
AGV 从仅由大公司应用,正向小公司单台应用转变,而且其效率和效益更好。
至此出现了智能车的概念。
1.1.2 应用前景城市公共交通是与人民群众生产生活息息相关的重要基础设施。
然而,目前世界上许多大城市都面临着由私人汽车过度使用而带来的诸多问题,例如道路堵塞、停车困难、能源消耗、噪声污染和环境污染等,这些问题严重降低了城市生活的质量。
优先发展城市公共交通是提高交通资源利用效率,缓解交通拥堵的重要手段。
国务院总理温家宝于 2005 年 10 月做出重要批示,要求优先发展城市公共交通,这是贯彻落实科学发展观和建设节约型社会的重要举措。
大容量城市公共交通,如地铁、轻轨等,其最大优点是空间利用率和能源利用率较高。
然而,由于缺乏足够的时间、空间、运力灵活性,在客流量不足的情况下,系统效率将大大降低,运营成本过高,难以大力推广和应用。
基于飞思卡尔单片机的避障灭火智能车设计

基于飞思卡尔单片机的避障灭火智能车设计作者:翟文鹏等来源:《硅谷》2015年第03期摘要随着自动控制技术的飞速发展,智能车辆成为未来汽车产业的重要发展趋势。
为实现车辆的自助完成任务,采用16 位单片机MC9S12XS128为主控制器,设计了避障灭火智能小车,通过光电传感器采集道路信息,火焰传感器感应火焰,实现了对智能车行驶速度和运动方向的控制,完成了灭火任务。
关键词智能车;避障灭火;飞思卡尔单片机;传感器中图分类号:TP242 文献标识码:A 文章编号:1671-7597(2015)03-0016-02智能车又被视为轮式的移动机器人,它具有人工智能的特点,在一定程度上代表了一个国家的自动化与智能化水平[1-2]。
本文以飞思卡尔16 位单片机MC9S12XS128为核心,制作了智能灭火小车,能够实现自主循迹及避障行驶、熄灭火焰等功能。
1 智能车的整体设计如图1所示,智能车共包括五大模块,分别包括MC9S12XS128 单片机最小系统模块、电源管理模块、电机驱动模块、光电检测模块和火焰检测处理模块。
采用7.2V1600mAh锂电池给系统供电,光电传感器检测到障碍信号,送到单片机中,判断出障碍位置并调整车轮的转角,完成转弯避障。
单片机收到火焰传感器的信息,由相关软件处理,及时发现火焰并驱动水泵浇灭火焰。
图1 模块原理图2 系统硬件设计2.1 单片机最小系统模块最小系统模块MCU选用的是飞思卡尔MC9SXS128单片机芯片,晶振为16M无源晶振,辅以复位电路及指示LED灯和滤波电容电感等组成。
采用RS232通信接口通信、BDM调试接口电路调试,模块负责对智能车所采集到的信号进行处理,并向各个功能模块发送控制信号[3-4]。
2.2 电源模块电源模块采用额定电压7.2V、额定容量1600mAh的锂电池作为动力源。
为减小电源纹波,获得稳定的供电电压,选用串联线性稳压芯片LM2940搭建5V稳压电路,分别对单片机最小系统模块、电源模块、光电检测模块、火焰检测处理模块提供动力能源。
2024年飞思卡尔直立车经验总结
2024年飞思卡尔直立车经验总结
2024年飞思卡尔直立车的使用经验总结如下:
1. 稳定性:飞思卡尔直立车在2024年的车身稳定性有了明显的提高,通过改进车身设计和悬挂系统,使得车辆在高速行驶和急转弯时更加稳定可靠。
2. 操控性:飞思卡尔直立车的操控性也得到了改善。
2024年的直立车配备了更加精确的转向系统和灵敏的加速/刹车系统,使得驾驶者能够更加轻松地控制车辆。
3. 安全性:飞思卡尔直立车在安全性方面也有了进一步的提升。
2024年的直立车配备了更加先进的安全系统,包括自动刹车、防抱死制动系统和车道保持辅助系统等,有效提升了驾驶者和乘客的安全性。
4. 舒适性:在舒适性方面,飞思卡尔直立车也有了显著的改进。
新一代的直立车采用了更加舒适的座椅和悬挂系统,减少了车辆行驶时的颠簸感,提供更加舒适的乘坐体验。
5. 智能化:2024年的飞思卡尔直立车配备了更加智能化的功能。
通过与车辆互联的系统,驾驶者可以获取实时的交通信息,导航系统也更加智能化,能够提供更加准确的路线规划。
总的来说,2024年的飞思卡尔直立车在稳定性、操控性、安全性、舒适性和智能化方面都有了显著的提升,为驾驶者和乘客提供了更加安全、舒适和便捷的出行体验。
第 1 页共 1 页。
强化车载MCU设计,飞思卡尔发动安全新攻势

强化车载MCU设计,飞思卡尔发动安全新攻势电子发烧友网:面对汽车伤亡事故率的不断上升,对驾乘者而言,汽车安全保障的压力剧增。
随着电气器件、电子设备、可编程电子器件在汽车控制领域的大量使用,一些全新的安全问题不断的被曝光。
具体来说,就是如何从目前基本的被动式安全气囊的系统,发展到主动式ABS、ESP、TPMS系统,再升级到复杂的高级驾驶员辅助系统(ADAS),最终提供更好的事故提前预测和避免事故发生的能力。
安全问题逐步成为汽车国际化面临的最大挑战。
随着ISO 26262功能安全等一系列标准规范的推出(及ASIL等级的逐步升级),将对汽车电子安全应用有更完整和细化的要求。
OEM厂商也会针对新的ISO26262的标准实现新的安全系统,给电子安全系统供应商提出更高的要求。
飞思卡尔汽车微控制器市场开发经理郗蕴侠认为,ISO 26262标准强化汽车安全要求严苛的应用,同时为安全器件厂商带来更多的商机。
飞思卡尔汽车微控制器市场开发经理郗蕴侠表示,针对安全要求严苛的应用,设计工程师需要进行架构选择。
如现有的大多数半导体解决方案或者缺乏灵活性,不能支持各种功能安全需求,或者要求在安全软件方面投入很大。
而额外的软件增加了复杂度并更容易导致系统故障。
因此,对半导体器件从系统的角度需要多方面的评估,在硬件结构上融入更多以前用软件诊断而现在全部由硬件自身检测的功能。
ISO 26262的颁布为能够实现符合功能安全器件的半导体厂商和能够提供符合功能安全系统的供应商带来更多的商机。
鉴于此,飞思卡尔半导体推出SafeAssure计划,致力于帮助汽车设计人员降低构建符合国际标准化组织(ISO) 26262标准的功能安全系统的复杂性,并缩短开发时间。
SafeAssure计划包括四个主要领域:安全流程、安全硬件、安全软件和安全支持。
布局安全MCU,飞思卡尔把控ADAS大关因为ADAS系统的复杂性,要求未来的MCU具有更强的运算和处理能力,频率达到1GHZ,有专门处理图像的单元,用于快速计算的DSP,高速的ADC,实现高速通讯的模块等。
飞思卡尔SafeAssure计划 ISO26262与集成安全系统
飞思卡尔SafeAssure计划ISO26262与集成安全系统汽车电子应用于汽车之中,一方面是提升使用者的驾乘体验,而更重要的一点则是提升驾驶的安全性。
得益于整车与半导体厂商在汽车安全领域不懈的努力与竞争,汽车的安全性能不断得以提升。
即便如此,汽车安全依然是汽车厂商与半导体厂商需要持续完善的重要技术趋势。
安全在将来的汽车研发中是关键要素之一,新的功能不仅用于辅助驾驶,也应用于车辆的动态控制和涉及到安全工程领域的主动安全系统。
将来,这些功能的研发和集成必将加强安全系统研发过程的需求,同时,也为满足所有预期的安全目的提供证据。
I SO 26262与集成安全系统先进的车辆控制技术、驾驶员辅助系统、碰撞预警系统和防碰撞系统都是旨在减少驾驶员失误和违规、提高汽车安全的有效主动措施。
随着计算性能的不断提高,以及嵌入式系统、传感器、模拟技术、自动控制和通信技术的出现,特别是更廉价、更小型,以及更便携的电子设备、传感器和中央处理器的加入,与作为响应性防碰撞措施的被动安全系统不同,主动系统一般采取感测(利用摄像头、雷达等)和驱动(即控制功能)来主动降低潜在的碰撞可能或风险。
这些系统旨在通过感测汽车、驾驶员以及周围环境来预测可能出现的驾驶事故,并主动规避以防止危险事件的发生,或预先启动安全系统以在碰撞的危急关头减少乘客所受的伤害。
基于主动概念,汽车设备制造商提供了各种不同的防碰撞和预警策略,为行车提供额外的安全性和舒适性。
1从整体去看集成安全,传感器的加入是至关重要的一环,传感器可以提供额外的状态监控和态势感知功能。
安全算法基于传感器所收集的数据,用各种确定性和随机的方法进行评价、评估、估算、感知和判断。
这些算法可以提供最优化、最安全的纠正措施,类似于熟练驾驶员在紧急状况下会做出的判断。
这些判断可充当智能副驾驶的角色,最后转换成具体的车辆控制操作(如制动、转向等)。
互动/干预/驱动的实际功能是安全系统设计的一部分。
ISO26262

ISO26262作者:彭斐编辑整理:IO酱近年来,汽车行业大量的技术创新都来源于汽车电子领域。
如今业界所说的汽车智能化,实则就是汽车电子化程度越来越高后实现的各种智能控制。
随着汽车电子技术的发展,动力传动系统、车身电子系统、驾驶员辅助系统等汽车电子系统日趋复杂,与功能安全的相关性不断提高,与安全相关的软件和硬件出现任何一个失效,都有可能会给人员、设备及环境带来严重的后果,而由此引发的车辆召回也会给企业带来巨大的经济损失。
如何在产品设计阶段就规避潜在的风险,已成为汽车制造商迫切需要解决的问题。
ISO26262是一个功能安全标准,命名为“道路车辆-功能安全”,由10个部分组成。
从2005年11月起,由ISO的TC22(道路车辆技术委员会)、SC3(电子电器分技术委员会)、WG16(功能安全工作组)及全球约30家汽车大厂商联合开始制定,历经约6年时间,于2011年11月15日作为ISO标准正式颁布。
整个生命周期的功能安全ISO26262功能安全标准是目前非常前沿的标准,它从电子、电气及可编程器件功能安全基本标准IEC61508派生出来, 主要定位在汽车行业中特定的电气件、电子设备、可编程电子器件等专门用于汽车领域的部件。
该标准从产品的整个生命周期进行评估,从需求开始,到概念设计、软件设计、硬件设计,包括最终的生产、操作,整个生命周期都提出了严格的要求,来保证安全相关的电子产品的功能性失效不会造成危险的发生。
此外,新标准还根据安全风险程度对系统或系统部件划分由A到D的安全需求等级(Automotive Safety Integrity Level,汽车安全完整性等级ASIL)。
安全风险等级越高,针对系统软硬件开发流程的要求也就越高。
除了更高的要求,开发方式的改变也是企业在实施新标准时面临的问题。
美国exida公司的高级安全专家灵誉森表示,ISO26262第二版预计将于2018年正式上路,ISO26262第二版会更加深入功能安全的开发,包括汽车智能化下的自动驾驶,结合功能安全和汽车安全,并改正ISO26262第一版存在的不足。
基于飞思卡尔单片机的汽车防盗器设计
基于飞思卡尔单片机的汽车防盗器设计湖北汽车工业学院毕业论文摘要本防盗系统设计以MC68HC908GP32单片机为核心控制模块,使用红外线遥控模块实现远程遥控开启和关闭系统,采用振动传感器采集外部振动信号,利用声光报警模块发出声光报警。
它的主要功能是当报警系统启动后,如果车子有振动,振动检测模块电路发出信号,经过单片机控制模块处理后,输出报警信号,再由报警模块实现报警。
本防盗系统设计主要包括硬件设计和软件设计两大模块,其中,硬件系统主要包括四个部分:红外遥控模块、振动检测模块、单片机控制模块、声光报警模块。
软件系统主要包括初始化模块、中断检测模块、报警控制等模块子程序。
本防盗系统具有功能完善、工作稳定、成本较低等特点,具有一定的推广作用。
关键词:单片机;振动检测;报警控制I湖北汽车工业学院毕业论文AbstractThe anti-theft system is designed by putting the M68HC908GP32 microcontroller as the core control module, using an infrared remote control module for remote control opening and closing system, using vibration sensors to collect external vibration signals, using sound and light alarm module warning. Its main function is when the alarm system activated, If the car has vibration, after single-chip control module processing the signal which coming from the vibration signal detection module circuits, putout alarm signal, and then alarming by the alarm module. The anti-theft system design includes hardware design and software design two modules, of which the hardware system mainly consists of four parts: Infrared remote control module, vibration detection module, single-chip control module, sound and light alarm module.Software system includes initialization module, interrupt detection module, alarm control module subprogram. The anti-theft system which is fully functional,stable job and cheap price and so on, so it has a certain role in the promotion.Keywords: Microcontroller;vibration detection;alarm controlII湖北汽车工业学院毕业论文目录摘要 ........................................................................... (I)Abstract ..................................................................... ...........................................................II 目录 ........................................................................... ......................................................... III 1 序言 ........................................................................... ..................................................... 1 2 本课题的研究背景............................................................................ . (2)2.1 单片机的发展与应用 ........................................................................... .................. 2 2.2 国内外对汽车防盗器的研究现状及发展................................................................. 3 2.3 汽车防盗器的类型和特点 ........................................................................... ........... 5 2.4 汽车防盗系统的未来展望 ........................................................................... ........... 7 3 MC68HC908GP32单片机 ........................................................................... (9)3.1 MC68HC908GP32基本组成及主要特点:............................................................. 9 3.2MC68HC908GP32内部结构及功能 ..................................................................... 10 4 系统传感器方案设计 ........................................................................... .. (18)4.1 红外线传感器 ........................................................................... ........................... 18 4.2 振动传感器 ........................................................................... ............................... 19 5 硬件设计 ........................................................................... .. (25)5.1 红外遥控模块电路设计 ........................................................................... ............. 25 5.2 振动检测电路 ........................................................................... ........................... 26 5.3 单片机控制电路............................................................................ ....................... 27 5.4 声光报警电路 ........................................................................... ........................... 28 6 软件设计 ........................................................................... .. (30)6.1 主程序 ........................................................................... ...................................... 30 6.2 初始化程序 ........................................................................... ............................... 30 6.3中断检测程序与定时器程序 ........................................................................... ........ 31 6.4 红外遥控模块发射与接收程序 ........................................................................... .. 32 7 系统调试 ........................................................................... .. (35)6.1 硬件调试 ........................................................................... . (35)III湖北汽车工业学院毕业论文6.2 软件调试 ........................................................................... .................................. 37 8 总结与展望 ........................................................................... . (39)8.1 总结............................................................................ ......................................... 39 8.2 展望............................................................................ ......................................... 39 致谢 ........................................................................... ......................................................... 40 参考文献............................................................................ ................................................. 41 附录 ........................................................................... (42)IV湖北汽车工业学院毕业论文1 序言随着社会社会的进步和经济的飞速发展,汽车的数量也在逐年攀升,但随之而来的汽车盗窃问题严重影响社会的和谐与安定,随着科学技术的发展,汽车偷盗技术也越来越高,给车主造成了重大损失。
MCU实现汽车功能安全合规性
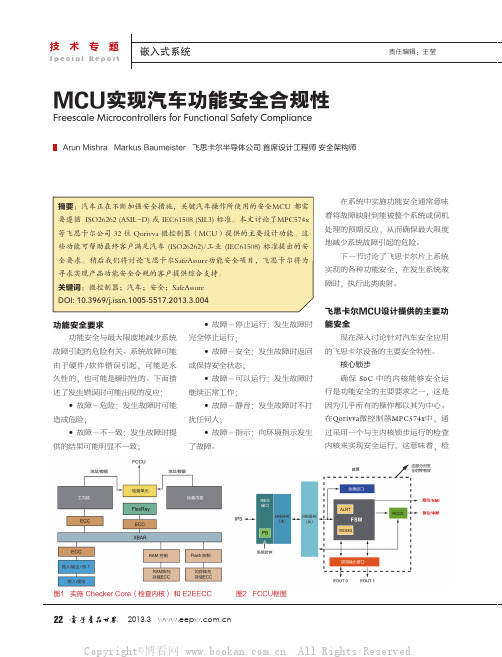
图1 实施 Checker Core(检查内核) 和 E2EECC图2 FCCU框图2013.322(E2EECC) 保护在海明间距为4 的情况下实现ECC(纠错码)和 SECDED(单纠错和双纠错),可保护所有的存储器存储操作。
ECC 在数据、地址信号上实现,并通过写操作与数据一起存储在存储器中。
发起读操作时,ECC 在检索到的数据和请求的地址上重新进行计算,并通过已存储的 ECC 进行验证。
在Qorivva MPC574x器件中,没有仅用于存储器的ECC,但它提供了当发生可纠正(单位或不可纠正(多位)的错误时,MEMU 都会收到一个错误信号,然后记录错误地址,设置相应的错误标记并报告给FCCU。
在需要特殊更正数时或进一步分析软件中这样的错误时,可以使用。
故障收集和控制单元(FCCU)FCCU是一个可编程的单元,监控MCU的完整性状态,提供灵活的安全状态控制,在设备发生故障时通过可控的方式使设备处于安全状态。
收CPU 的干预。
足够的覆盖率,可满足所要求的系统安全完整性等级(SIL)。
1. 在 STCU 重置事件后,SSCM检测到设备自我检测尚未运行。
2. SSCM 从非易失性闪存存储器(NVM) 读取自我检测参数。
3. SSCM 将自我检测参数加载到STCU 中,并将控制传送到 STCU。
4. STCU 管理 MBIST 并更新其内部状态。
5. STCU 管理 LBIST 并更新其内部状态(可能有其他LBIST和MBIST的图3 系统启动过程中 STCU 的运行图4 CMU简易框图图5 飞思卡尔质量基础飞思卡尔 SafeAssure 计划飞思卡尔SafeAssure功能安全计划旨在帮助系统制造商更轻松符合国际标准组织(ISO)26262和国际电工委员会(IEC)61508功能安全标准。
该计划强调飞思卡尔解决方案(硬件和软件),优化了设计,支持功能安全实施,同时集成了丰富的支持。
飞思卡尔方案包含四个支持领域,可使客户大大减少产品上市周期。
飞思卡尔汽车解决方案让系统更轻松地达到安全标准

飞思卡尔汽车解决方案让系统更轻松地达到安全标准佚名【期刊名称】《汽车零部件》【年(卷),期】2012(000)007【总页数】1页(P41)【正文语种】中文近日,飞思卡尔半导体帮助汽车设计人员降低构建符合国际标准化组织(ISO) 26262标准的功能安全系统的复杂性,并缩短了开发时间。
Qorivva MPC574xP 32位微控制器和系统级芯片MC33906/7/8系列是飞思卡尔新推出的SafeAssure解决方案,可帮助汽车系统满足包括最严格的ASIL D级在内的所有汽车安全完整性等级。
其面向的应用包括电动助力转向、电子稳定控制系统、汽车动力和底盘控制、安全域控制、自适应巡航控制和盲点检测。
Qorivva MPC574xP MCU 和 MC33906/7/8 SBC 系列在设计的基础阶段便采用了一种方法,使系统制造商能够更轻松地达到系统功能安全标准,提供了集成的硬件安全架构,附带的安全软件和帮助缩短开发时间的综合支持基础架构。
飞思卡尔副总裁兼模拟和混合信号产品事业部总经理Gavin Woods表示:“我们的系统级方法帮助开发人员降低为了满足安全标准而带来的复杂性,同时在系统中构建了高级安全性能。
我们的新一代SBC和最新Qorivva MCU有飞思卡尔SafeAssure计划作后盾,使我们的客户能够满足其系统级功能安全目标。
”消费者的安全意识和法律法规提高了汽车安全性要求,因此对于汽车OEM 来说,电子控制单元级的复杂性也越来越高。
将MPC574xP MCU与飞思卡尔的SBC器件结合使用,可帮助简化系统设计,并优化监控、诊断和软件架构等方面的交互,同时每个器件还有其自己的故障安全检查机制。
据介绍,Qorivva MPC574xP MCU提供满足功能安全要求所需的性能和特性,最高可满足ISO 26262 ASIL D级。
Qorivva MCU的运行频率最高可达180 MHz,采用55 nm工艺构建,具有集成的安全架构、双核延迟锁步和额外的片上冗余。
基于飞思卡尔单片机的智能小车设计与应用毕业论文
安徽建筑大学毕业设计(论文)专业:通信工程班级:09通信1班学生姓名: xxx学号: 006课题:基于飞思卡尔单片机的智能小车设计与应用——主控制电路设计指导教师:2013 年 6 月5日摘要本文的主要内容是利用飞思卡尔公司的32位单片机MPC5604MINI,设计能在特定跑道上循迹行驶的智能小车。
智能车系统以MPC5604MINI为核心,用它来进行信号采集、数据传输与运算等动作,并产生PWM波控制舵机和电机。
整个系统由单片机模块、路径识别模块、速度检测模块、舵机模块、直流电机驱动模块、电源模块等组成。
智能小车的硬件设计包括:双向控制的电机驱动,可同时对多模块供电的电源系统, PWM波形驱动舵机电路,与上位机通信的RS232通信模块等。
关键字:智能小车,MPC5604MINI,主控电路,双向控制。
AbstractThe main content of this paper is to use the 32-bit SCM freescale company mpc5604mini, in particular the runway design can trace the car driving on intelligence. Intelligent car system to mpc5604 as the core, and use it to signal acquisition, data transmission and computing such action and create PWM wave to control the steering gear and motor. The whole system of microcomputer module, path recognition module, speed detection module, steering gear module, dc motor driver module, power supply module.Intelligent car of hardware design including: two-way control motor drive, but at the same time for more power supply module of the power supply system, V PWM waves of steering gear drive circuit, and the upper machine RS232 communication module of communication, etc.Key word: Intelligent vehicles, MPC5604MINI, master control circult, Two-waycontrol.目录11引言 (1)选题意义 (1)国内外概况 (1)国外概况 (1)国内概况 (2)智能车的发展前景 (3)2 系统设计及方案论 (3)系统设计要求 (3)系统设计方案 (3)图系统总框图 (4)主控芯片的选定 (4)传感器模块 (5)测速传感器模块 (5)转向舵机模块 (6)电机驱动模块 (6)3主控芯片中所用模块简介 (6)PWM 模块 (6)PIT模块 (7)I/O模块 (7)SCI模块 (7)4 智能车机械设计及安装 (7)舵机的安装 (8)后轮倾角的调整 (8)前轮差动轮的调整 (9)速度检测模块安装 (9)传感器的安装 (9)5系统电路部分解析 (9)主控芯片电路 (9)外围电路 (11)电源管理模块 (11)速度检测电路 (15)舵机驱动电路 (16)拨码开关电路 (17)RS232通信模块 (17)6软件设计 (18)软件流程简图 (18)软件流程图介绍 (19)该系统的软件设计流程是先通过摄像头对赛道信息进行采集,把采集到的信息通过LM1881进行场分离,同时提取出信息的时钟信号,当场同步信号来到时系统进行图像行同步信号的读取,当读到行同步信号时,将要对图像信息进行逐行扫描,达到指定的行数之后就对图像进行预处理和中值滤波,这里预处理用到的是二值化处理,因为采集的图像是黑白的,只需设置一个合理的阈值,把图像处理成只有黑白两种颜色,便于我们采集到赛道两边的黑线信息,然后再进行中值滤波,把信号采集中出现的椒盐噪声所引起的一些孤立黑点给去除掉,从而可以提取出一条清晰的赛道信息,把赛道信息传给主控芯片,由主控芯片产生一个PWM波,PWM波是一个占空比可调的,再由PWM波去控制转向舵机,从而控制小车的转动方向,双向电动机的转动方向的转动速度也是由PWM 波控制的,最终使小车在赛道上平稳快速的行使。
产品经理学习资料 - 汽车功能安全产品设计概述2021

汽车功能安全产品设计概述随着电动化、智能化的发展,越来越多的汽车配备了电子电气系统,如电传动系统、助力转向系统、自动驾驶系统等,原有的机械部件被电子器件取代。
而引入如此复杂的电子电气系统对整车安全带来了极大的风险,简单的一个元器件老化、失效,都有可能引发系统故障,进而导致事故发生。
因此,对汽车及其相关零部件安全的要求也是越来越高。
为了达到更高程度的安全要求,在针对其他行业安全的通用IEC61508标准的基础上,衍生出针对汽车行业特定的ISO26262功能安全标准。
ISO26262要求车载电子电气系统在检测到潜在的危险情况,启动保护或纠正装置,以防止发生危险事件或提供缓解措施以减少危险事件的后果。
简而言之,功能安全的最终目的是确保产品安全运行,即便出现问题也能够最大程度减少伤害。
所以,在电动化及智能化程度最高的新能源汽车行业,引入和深入实施ISO26262功能安全标准,指导相关的产品开发,是十分必要的。
ISO26262对关键的安全级别进行了四层划分,通过汽车安全完整性等级(ASIL)来衡量。
ASILA是最低等级,要求数目约100个左右,而ASILD是最高等级,要求数目近200个。
等级越高,安全系统就需要提供越多的安全和验证措施,需要增加更多的测试和集成工作,也就意味着供应商需要承担更多的开发成本和时间。
为了实现新能源汽车的整车功能安全,需要OEM和各级供应商有着明确的职责划分和合作模式,国外主机厂在与供应商合作中,如博世、电装等,都有着明确的功能安全标准和验证要求。
当然不同的汽车部件对功能安全的要求是不同的,越核心的部件需要越高等级的功能安全。
就新能源汽车车辆自身安全而言,电机控制器不得不算是最核心的部件之一,电机控制器作为新能源汽车的动力控制系统,掌握着整车的加速、刹车等关键性能,电控失效带来的安全风险不容忽视,所以,符合功能安全的电控设计正逐渐成为业内的普遍需求,当前对电控的功能安全需求多为ASILC等级,但在未来,电控的功能安全需求或将提升为ASILD级,这需要供应商具备复杂度更高、冗余性更强、可靠性指标更高的电控产品设计能力和水平。
什么是功能安全?汽车功能安全的设计方案
什么是功能安全?汽车功能安全的设计方案如今,汽车行业变革迅猛,汽车的设计、使用和销售模式都在快速演变。
驾驶员安全技术、交通拥堵、环境问题及汽车作为代步工具的基本前提都影响着新一代汽车的研发。
为解决这些难题,很多汽车厂商都试图强化计算能力以优化车辆控制。
欧盟新车安全评鉴协会(EuroNCAP)颁布的新标准规定,车道变换支持等安全辅助功能是获得五星安全评级的必要条件。
车载处理器的数量在所有细分市场都稳步上升,目前平均为40-50个,而一些高端车型则已经搭载近120个处理器。
据Semicast Research预测,到2022年,仅发动机引擎罩下的电子控制单元(ECU)组件就将达到近860亿美元的市场规模,相较2015年的530亿年复合增长率达到7%。
半导体厂商将有机会在汽车电子领域挖掘一大桶金。
高科技芯片可以改善动力系统排放、增强安全性能、并利用蜂窝网络实现车辆间及道路基础设施之间的互联。
但是,随着系统的复杂化,保证驾驶员安全就变得更为关键,必须打造更加自动化,系统化,且能患于未然的解决方案即我们通常所称的功能安全。
什么是功能安全?简而言之,功能安全的最终目的是确保产品安全运行,即便出现问题也可以继续保驾护航。
基于这一理念,ARM将保证安全视为头等大事,而非单纯依照市场导向随波逐流,不断加强研发,推出更多功能安全相关产品。
各行各业都会制定标准,指导未来发展并限定最低准入门槛。
在汽车电子行业,这一标准就是ISO 26262,它将功能安全定义为:避免因电气/电子系统故障而导致的不合理风险。
不同领域的标准并不完全一致,例如针对电气和电子系统的IEC 61508以及飞行器电子硬件的DO-254都有各自的定义方式。
更需值得注意的是,它们都拥有专用术语,并提供了包括目标参数在内的工程研发指导。
因此,开始产品研发前确定目标市场并制定合适的流程至关重要,因为中途修改研发流程必然会导致效率低下。
图1展示了硅片IP的不同应用标准。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
从飞思卡尔SafeAssure功能安全保障方案看汽车安全设计
就在您阅读完本文不到十分钟的时间内,全球大概有超过二十人已经因为车祸离开这个世界,而其中大约有90%是来自像中国这样的发展中国家(数据参考世界卫生组织统计。
汽车造福人类的同时,在全球科技空前发达的今天,因为交通事故带来如此重大的公共安全威胁不啻为人类的一大悲剧。
从汽车诞生开始,人们就没有停止过对汽车安全驾驶的追求。
最早的安全带以及后来的安全气囊等被动安全措施挽救了数千万人的生命,后来发展起来的ABS(防抱死制动系统、ESP(电子稳定程序、EBD(电子制动力分配系等主动安全功能让汽车安全性再次大大提高。
但尽管如此,交通事故依然是最大非自然死伤原因之一。
图1 世界卫生组织统计:全球每年因交通事故死亡130万人,并有5000万人受伤“随着系统复杂性的提高,以及软件和机电设备的大量应用,因为系统失效和随机硬件失效导致的交通事故风险也日益增加。
因此,近年开始出现了新的汽车安全概念——安全性预测。
”在近日召开的“2012产业和技术展望媒体研讨会”上,飞思卡尔亚太区汽车及工业解决方案事业部全球产品市场经理郗蕴侠(Yolanda博士指出,“安全性预测即汽车里的一些系统能实时检测故障,在故障发生之前就能预警防止故障发生,这就是当前大家倡导的汽车功能安全的概念。
”为此,飞思卡尔推出了命名为“SafeAssure”的安全保障方案,旨在帮助系统制造商更加轻松地满足汽车和工业市场中的功能安全标准要求,并大大降低开发难度、缩短开发周期。
图2 汽车安全系统的演变——基于安全性预测的功能安全出现从IEC61508到ISO 26262,看汽车功能安全演变 2011年11月推出ISO 26262之前,汽车行业遵照的功能安全标准是电子、电气及可编程器件功能安全基本标准IEC 61508。
然而,作为一种通用基础安全标准,对于汽车行业的特殊性而言,该标准有很多的不足,特别是近年来汽车系统的复杂性日益增长的条件下。
从IEC 61508派生出来的ISO 26262为当前汽车行业量身定制,特别是ISO 26262对于硬件研发、软件研发的要求适合于当前先进的汽车工业的实际现状。
ISO 26262标准根据安全风险程度对系统或系统某组成部分确定划分由A到D的安全需求等级(汽车安全完整性等级——ASIL,其中ASIL D级为最高等级,具有最苛刻的安全要求。
对系统供应商而言,必须满足这些因为安全等级提高而提出的更高的设计要求。
安全事件总是和通常的功能、质量相关的研发活动以及产品生产伴随在一起。
ISO26262强调了研
发活动和产品生产的安全相关各个方面,并为汽车安全提供了一个生命周期理念,在这些生命周期阶段中提供必要的支持。
ISO26262涵盖了功能安全方面的整体开发过程,包括规划、设计、实施、集成、验证、确认和配置。
SafeAssure安全保障方案在ISO26262推出前两个月,飞思卡尔SafeAssure安全保障方案就在业内率先推出。
“SafeAssure是针对汽车和工业市场功能安全标准设计的解决方案,帮助企业简化达标的流程,缩短开发时间和降低复杂性。
”Yolanda指出,“基于SafeAssure功能安全保障方案,厂商可以轻松实现从ASIL-A至D以及SIL-1至4等级的系统安全标准。
” 图3:Freescale郗蕴侠:基于SafeAssure功能安全保障方案,厂商可以轻松实现从ASIL-A至D等级的系统安全标准。
SafeAssure保障方案涵盖飞思卡尔系列的技术,包括微控制器、模拟和电源管理IC以及传感器。
SafeAssure安全保障方案对厂商提供了四个方面的支持,包括:安全流程:挑选那些定义和设计之初就以符合各项标准要求为目标的产品,使功能安全成为产品开发流程的一个完整组成部分。
安全硬件:故障控制通过在飞思卡尔微控制器、电源管理IC和传感器中内置的安全功能实现,例如自测、监控和基于硬件的冗余。
飞思卡尔汽车模拟器件解决方案提供了额外的系统级安全功能,包括检查微控制器时序、电压和故障管理。
安全软件:全面的汽车功能安全软件产品,包括AUTOSAR OS、MCAL、驱动和内核自测功能,并与领先的第三方软件提供商合作推出更多的安全软件解决方案。
安全支持:飞思卡尔利用自身覆盖广泛的
技术能力,提供功能安全架构有关的客户培训和系统设计审核,以及广泛的安全文档和技术支持。
SafeAssure主要目标是化繁为简,为简化失效故障分析,飞思卡尔还提供一个重要分析工具——失效模式、效果和诊断分析(FMEDA,这个工具分析客户整个数据,最后算出的结果是不是达到功能安全所需要的要求。
FMEDA工具可以帮助客户根据其应用来计算最后功能安全结果,从而使SafeAssure方案有效简化功能安全设计工作。
从MPC5643L单片机看功能安全机制 Yolanda指出:“硬件安全的理念主要通过检测和消除随机硬件故障,利用内置的安全机制,包括自检、监测和基于硬件的冗余设计来实现。
”厂商可以充分利用在飞思卡尔微控制器、电源管理IC和传感器中内置的功能安全机制实现有效的故障控制,从而实现目标市场对功能安全设计的要求。
功能安全设计需要针对可能出现功能失效进行预测,包括单点失
效、潜在失效和共因失效。
按照ISO 26262的最高等级ASIL D的要求,所设计的系统要能检测出大于99%的单点失效率,潜在失效检测要超过90%。
例如,如果一个系统的每小时失效率低于10-8,则落到单片机的每小时失效率必须低于10-9。
“在我们的单片机设计过程中更严格,错误概率更小。
”Yolanda 表示,“MPC5643L就是飞思卡尔针对功能安全推出的一款单片机产品,这款产品的设计体现了功能安全的设计理念。
” 冗余设计是有效提高系统失效安全的有效措施之一,MPC5643L中充分利用了冗余设计确保严格的功能安全标准要求。
MPC5643L采用了双e200Core内核锁步(lockstep工作模式,一个内核工作的同时另一个内核进行监测。
此外, MPC5643L还对主要的模块如看门狗定时器、内存相关控制单元、总线及外设都进行了冗余。
而且,为了防止单点失效,MPC5643L内置的闪存还具有自动纠错功能。
通常,很多系统开始都能正常工作,但是过了几年之后,因为外部一些因素触发而可能产生一些失效故障,这就是潜在失效的概念,功能安全设计需考虑潜在失效。
“过去潜在失效的防范都是由软件实现,软件每一次在单片机复位以后都会对所有的内存或者是逻辑进行一次校验。
而在MPC5643L中,将校验功能由硬件实现,即内置自测,这是功能安全对单片机非常重要的要求,这种自测功能可以把内存或者是逻辑以及外设的一些错误检测覆盖率达到90%以上。
”Yolanda指出。
除此之外还需要考虑共因失效。
“共因失效是什么呢?比如说时钟,它会提供给很多模块,还有电压也会提供给整个的单片机。
此外,温度也是重要考虑的问题,如果一旦芯片温度过高,也可能导致芯片失效。
”Yolanda解释了共因失效的定义,“这些共因失效都需要检测,MPC5643L对时钟、电压以及温度都有检测。
”从成本考虑以及应用环境的原因,通常的应用中单片机并不具有温度传感器这些考虑共因失效的功能特性。
除此之外,MPC5643L内部还集成了一个独立于CPU的错误收集和应对模块(FCCU,该模块在时钟上也跟CPU 独立开,可以完全独立操作,把这些错误收集起来并做相应的应对措施。
这个功能模块也是传统单片机所不具备的。
等多种失效保障机制本文小结据Yolanda指出,目前基于功能安全的安全性预测在欧美和日本等发达市场已经发展得非常成熟,很多相关的产品即将推入市场,而在中国国内才刚刚开始起步。
高级驾驶员辅助系统作为安全性预测的标志性应用,目前已经进入很多高端汽车的研发流程。
以飞思卡尔公司为例,对高级驾驶员辅助系统提供了全部整套的解决方案,包括后视的停车辅
助、全景辅助、前景安全性预测(车道偏离预警、自动巡航系统,等等。
事实上,目前很多全球领先的汽车半导体解决方案提供商都将目标瞄准高级驾驶员辅助系统,基于功能安全的汽车安全性预测的广泛应用指日可待。