ADAMS CAR 车辆操稳性 国标试验 仿真设定参数
ADAMSCAR车辆操稳性国标试验仿真设定参数

ADAMSCAR车辆操稳性国标试验仿真设定参数车辆操稳性是评判一辆车辆在行驶中稳定性和控制性能的重要指标,而国标试验是一种标准化的测试方法,用来评估车辆在各种路况下的操稳性表现。
为了提高车辆的操稳性,必须通过仿真模拟来研究并优化车辆在不同条件下的行驶性能。
在进行车辆操稳性国标试验的仿真设定参数时,需要考虑以下几个关键因素:
1.道路条件:不同的道路条件对车辆操稳性的影响很大,因此需要考虑在干燥、湿滑、结冰等各种不同路面条件下进行测试。
在仿真模拟中,可以通过调整路面摩擦系数和路面粗糙度等参数来模拟不同的道路条件。
2.车辆参数:车辆的动力学特性和操纵性能对操稳性有着重要影响,比如车辆的质量、轴距、悬架刚度、转向系统等参数。
在仿真模拟中,需要正确设置车辆的动力学模型和操纵性能模型,以便准确地评估车辆在各种条件下的操稳性表现。
3.控制系统:车辆的控制系统对操稳性也有着重要影响,比如ABS、ESP等电子辅助系统。
在仿真模拟中,需要正确设置控制系统的参数和工作逻辑,以便模拟真实车辆在紧急情况下的控制响应。
4.测试项目:车辆操稳性国标试验通常包括直线行驶、转向稳定性、抗侧滑性、抗侧风性等多个测试项目。
在仿真模拟中,需要设置合适的测试项目和参数,以便完整地评估车辆的操稳性性能。
综上所述,车辆操稳性国标试验的仿真设定参数是一个复杂的过程,需要考虑到各种因素的相互影响。
通过准确设置道路条件、车辆参数、控制系统和测试项目等参数,可以有效地评估车辆在不同条件下的操稳性表
现,为改进车辆性能提供重要参考。
通过仿真模拟研究,可以提高测试效率、降低成本,并为优化车辆设计和改进控制系统提供指导。
基于ADAMS/Car的轴距对汽车操纵稳定性影响仿真
1 汽车模型的建立
A D A M S / C a r 软件 可 以在 不 同工 况 下 进 行仿 真 , 准
确模拟汽车的操纵稳定性、 乘坐舒适性、 安全性等各项
基于ADAMS-Car的悬架系统对操纵稳定性影响的仿真试验研究共3篇

基于ADAMS-Car的悬架系统对操纵稳定性影响的仿真试验研究共3篇基于ADAMS/Car的悬架系统对操纵稳定性影响的仿真试验研究1随着现代汽车技术的日新月异,悬架系统作为整车动力系统的重要组成部分,越来越受到了汽车制造商和消费者的关注。
悬架系统不仅影响着汽车的行驶舒适性和稳定性,还直接影响着汽车的操纵性能。
因此,对悬架系统的研究和探讨变得异常重要。
本文基于ADAMS/Car软件平台对悬架系统对操纵稳定性的影响进行了仿真试验研究。
首先,通过对悬架系统的结构和工作原理进行分析,构建了悬架系统的计算模型。
然后,设定了不同路面条件下的仿真试验方案,对悬架系统在不同路面情况下的操纵稳定性表现进行了仿真分析。
最后,通过对仿真结果进行深入分析,总结出了悬架系统对操纵稳定性影响的规律和相关因素。
首先,本文从悬架系统的结构和工作原理入手,对悬架系统的重要组成部分进行了介绍和分析。
悬架系统由弹簧、减震器、连杆等组件组成,其中弹簧具有缓冲起伏的作用,减震器则能为车辆提供稳定的支撑力,使车辆行驶更稳定。
在分析悬架系统工作原理的基础上,本文建立了悬架系统的计算模型。
其次,本文设定了不同路面条件下的仿真试验方案。
通过ADAMS/Car软件平台,设置了标准路面、凸凹路面和颠簸路面三种不同路面条件下的仿真试验方案,并分别对其进行仿真分析。
在仿真试验过程中,本文重点观察了车辆加速、刹车和转向等操作时的操纵稳定性表现,并对仿真数据及车辆动态图像进行了记录和分析。
最后,本文通过对仿真结果进行深入分析,总结出了悬架系统对操纵稳定性影响的规律和相关因素。
通过对不同路面条件下的仿真试验数据进行统计和分析,可以看出悬架系统对车辆操纵稳定性具有显著的影响。
同时,弹簧的刚度、减震器的阻尼、连杆的长度等因素也会影响到悬架系统的性能表现。
综上所述,本文基于ADAMS/Car软件平台对悬架系统对操纵稳定性影响的仿真试验研究,对深入探讨悬架系统的影响因素和控制方法具有一定的参考价值。
基于ADAMS的轿车操纵稳定性仿真分析
基于ADAMS的轿车操纵稳定性仿真分析作者:梅雪晴姚鹏华来源:《科学导报·学术》2020年第16期摘 ;要:通过建立某轿车整车ADAMS多体动力学模型,按照国标要求进行整车稳态回转试验、角跃阶输入和转向回正性试验的操纵稳定性仿真,仿真结果表明该车的操纵稳定性良好。
关键词:整车模型;操纵稳定性;仿真1.引言汽車的操纵稳定性是“高速车辆的生命线”[1],对高速汽车的行驶安全具有绝对重要的作用。
操纵稳定性研究的内容非常多,实车实验耗时耗力,而且具有一定的危险性。
本文将采用ADAMS动力学仿真的方法来获得部分操纵稳定性实验的仿真结果[2],为轿车操纵稳定性研究提供分析依据。
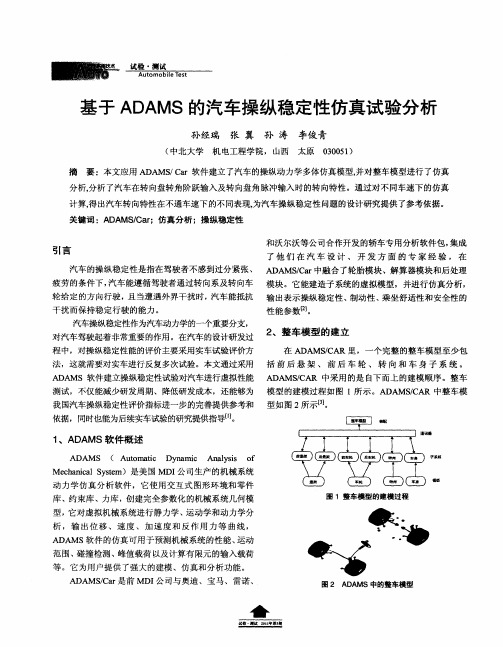
2.整车仿真模型的建立为了简化计算和抓住动力学的本质,需要对整车模型作适当的简化。
整车质量参数、运动学参数和力学特性参数由厂家提供,外界参数(如路谱)由ADAMS软件系统提供。
整车模型包括转向、前悬架、后悬架、前轮胎、后轮胎以及车身等子系统。
每个子系统均先在ADAMS 模板上建立模型,再建立相应的子总成,通过信息交换器将各个子总成组合成轿车的整车模型[3]。
其中转向系统为齿轮齿条式,前悬架为麦式独立悬架,后悬架为双连杆式独立悬架,前后轮胎型号均为175/70 R13,整车模型见图1,模型部分具体参数见表1。
3.整车操纵稳定性仿真与结果分析评价汽车操纵稳定性的指标研究内容有很多,这里仅选择最基本的稳态回转试验、角跃阶输入和转向回正性试验。
3.1稳态回转试验稳态回转试验用以测定汽车对转向盘输入达到稳定行驶状态时汽车的稳态横摆响应。
依照国家标准有关规定,评价指标包括中性转向点的侧向加速度值an、不足转向度U以及车身侧倾度Kφ。
根据GB/T6323.6—94补充件规定,采用定转弯半径法进行稳态回转测试。
汽车以最低稳定车速行驶,调正转向盘转角,沿半径为30米的圆弧行驶。
在进入圆弧路径并达到稳定状态后,保持油门和转向盘位置在3s内不动开始记录。
基于adams的汽车操纵稳定性仿真分析

摘要随着汽车技术的发展,用户对汽车性能的要求越来越高,汽车行业的竞争逐渐加剧。
在产品开发中采用虚拟样机分析的开发策略,已成为各大汽车公司缩短产品开发周期、减少产品开发费用、提高产品开发质量,从而提高竞争能力的主要做法。
以多体动力学为理论基础的ADAMS软件是由美国MDI公司开发的一种机械系统动力学分析软件。
目前己成为世界各主要汽车公司及其零部件供应商的主要动力学仿真软件。
利用ADAMS/Car软件,建立了包括前后悬架、转向、车身、动力总成、轮胎、路面等系统在内的整车多体动力学模型。
应用该模型进行了稳态回转、转向回正性、转向盘角阶跃输入、转向盘角脉冲输入、蛇行等仿真分析,同时还以操纵稳定性中的角阶跃试验为例,分别分析了汽车的质心高度、前后位置、前后悬架弹簧刚度和整车载荷等参数对操纵稳定性的影响。
仿真结果表明,该车具有良好的操纵稳定性,从分析来看质心略微前移汽车的操纵稳定性得到改善;而适当的降低质心高度、增加前后悬架弹簧刚度、和减少载荷,有利于整车的操纵稳定性。
关键词:ADAMS;仿真;操纵稳定性Simulation Analysis of Vehicle Handling Stability of Santana2000 Based on ADAMS/CarABSTRACTWith the development of the vehicle technology,and concerning about the car performance,the competition of the car industry becomes more and more intense.In the exploitation of the production,one of the main methods is to use the virtual prototyping technology to exploit the production of car,which may deeply shorter the competition ability,lessen the expenses,improve the quantity,and enhance the competition ability.Based on the multi-body dynamics theory exploited by Mechanical Dynamics,Inc,the ADAMS is a type of software of dynamic analysis of mechanical system.At present,many main car corporation and their accessory suppliers use the ADAMS an their main software of dynamic analysis of mechanical system.The article builds a whole vehicle model that contains suspension,stabilize bar, steering,body,powertrain,tires and road etc by using ADAMS/Car.Appling the full vehicle model,have performed Steady static circular test simulation,returnability test simulation,Steering wheel angle step input simulation,Steerwheel angle pulse input simulation,Pylon course slalom test simulation,and through triangular bump pulse input simulation test,several main factors are discussed in order to study the rule of vehicle parameters affecting on handing stability, including mass gravity center height, the location of center of mass, leaf spring stiffness and the load.The simulation results show that handing stability of the vehicle is good. From the analysis of the test, the centroid slightly forward is beneficial to handing stability. And suitably reducing the height of mass center, increasing front and rear leaf spring stiffness and load reduction can be improved handling stability performance.Key Words: ADMAS;Simulation;Handling Stability目录摘要 (I)ABSTRACT (II)引言 (1)1 绪言 (2)1.1 课题的研究背景 (2)1.2 课题研究的历史及发展现状 (3)1.2.1 车辆操纵稳定性研究历史及现状 (3)1.2.2 车辆动力学仿真技术发展及现状 (4)1.3 小结 (6)2 基于ADAMS/Car 的车辆建模 (7)2.1 ADAMS/Car 建模基本原理 (7)2.2 车辆仿真模型的相关参数 (8)2.3 前悬架模型的建立 (8)2.4 后悬架建立 (10)2.5 转向系模型的建立 (12)2.6 轮胎模型的建立 (13)2.7 车身模型 (15)2.8 动力模型的建立 (15)2.9 整车模型装配 (16)2.10 小结 (16)3 汽车操纵稳定性仿真试验及影响因素分析 (17)3.1 汽车操纵稳定性概述 (17)3.2 转向盘转角阶跃输入仿真试验 (18)3.2.1 车速为105km/h下的转向盘角阶跃输入仿真试验 (18)3.2.2 不同速度下转向盘角阶跃输入仿真试验 (20)3.2.3 不同弹簧刚度下转向盘角阶跃输入仿真试验 (21)3.2.4 不同质心高度转向盘角阶跃输入仿真试验 (24)3.2.5 质心前后位置转向盘角阶跃输入仿真试验 (25)3.2.6 满载与空载转向盘角阶跃输入仿真试验 (27)3.3 转向盘转角脉冲输入仿真实验 (28)3.3.1 汽车在105km/h下的转向盘转角脉冲试验 (28)3.3.2 不同速度下转向盘转角脉冲试验 (29)3.4 转向回正仿真试验 (31)3.5 稳态回转仿真实验 (32)3.6 蛇形仿真实验 (33)3.7 小结 (36)全文总结 (37)参考文献 (38)致谢................................................................................................ 错误!未定义书签。
基于ADAMS的电动汽车操纵稳定性分析
0引言汽车操纵稳定性是指在驾驶者不感到过分紧张、疲劳的条件下,汽车能遵循驾驶者的意志通过汽车转向系及转向车轮按给定的方向行驶,且当遭遇外界干扰时,汽车能抵抗干扰而保持稳定行驶的能力[1]。
本文利用虚拟样机软件Adams/car 对某国产电动车建立整车模型,在此模型基础上按照汽车行业标准《汽车操纵稳定性试验方法》[2]进行稳态回转和转向角阶跃仿真试验,并根据《汽车操纵稳定性指标限值与评价方法》[3]对所得结果数据进行评价分析。
1整车动力学模型建立Adams/car 中建立模型的流程为:模板———子系统———装配体[4]。
本文的建模步骤如下:①该电动车选用的前悬架是麦弗逊式悬架,本文仅对弹性元件柔性体建模,其余部件视作刚体模型。
②后悬架采用扭力梁式悬架,采用Adams/car 中自带的扭力梁式悬架模板。
③车身建模时忽略车身的外观,简化成为一个质量点,使用Adams/Car 固有的车身模。
④轮胎系统所受到的路面作用力和力矩都影响着汽车的行驶性能。
本文采用的轮胎模型为Pacejka89轮胎模型,适用于接下来操纵稳定性的分析。
⑤将子系统与整车测试台装配后得到整车刚柔耦合模型,如图1。
2汽车操纵稳定性仿真分析2.1稳态回转2.1.1试验过程依据国标(GB/T 6323.6-2014)对汽车进行定转弯半径仿真试验。
设定汽车以最低稳定车速沿半径为20m 的圆周行驶,在保持行驶稳定后将方向盘角度固定,缓慢连续均匀地加速(纵向加速度不超过0.25m/s 2),标准规定加速至侧向加速度为6m/s 2。
2.1.2数据处理在Adams 后处理模块选取需要的测量曲线,并进行数据处理如下:①转弯半径比R i /R 0与侧向加速度a n 曲线图。
生成横坐标为侧向加速度和纵坐标为横摆角速度的关系图(见图2),利用公式(1)可以计算求得试验过程中的各点转弯半径(1)②前后轴侧偏角差值(δ1-δ2)与侧向加速度a n 关系曲线。
由公式(2)可函数编辑求得(δ1-δ2)(2)式中:δ1、δ2分别为前后轴侧偏角值;L 为轴距。
基于ADAMS 的汽车操纵稳定性仿真试验分析
现将不同车速下的方向盘转角、横摆角速度等列于
表 2(方向盘转角、侧向加速度、横摆角速度、侧倾角
为各车速穿越 4 个有效标桩时峰值的平均值)。
表 2 蛇形试验中的主要特征参数
车速 方向盘转角 侧向加速度 横摆角速度 侧倾角 穿桩时间
(km / h) (deg)
(g)
(deg / s) (deg) (s)
收 稿 日 期 :2008-08-02 作 者 简 介 :李 华 师 (1985- ),女 ,山 东 菏 泽 人 ,在 读 研 究 生 ,研 究 方 向:车辆系统动力学
·20·
立各子系统后, 可根据汽车的一些实际数据参数进 行修改,这些参数主要包括运动学几何定位参数、质 量参数和力学特性参数。 最后选择试验装配方案 (Test Rig)_MDI_SDI_TESTRIG,将 上 述 子 系 统 进 行 装配得到整车模型,如图 1 所示,其整车关键参数如 表 1 所示。
2008 年 11 月
2 操纵稳定性仿真试验
2.1 转向盘角阶跃试验仿真分析
转向盘角阶跃试验是指给行驶的汽车一个转向
盘角阶跃输入,记录横摆角速度、侧向加速度、车身
侧倾角等值的变化,主要是通过各参数的时域响应
和频域响应来评价汽车的转向盘角阶跃输入试验的
性 能 [3]。
仿真试验在平直的路面上进行,使汽车匀速行
引言
随着汽车车速的提高,汽车的安全性越来越受 到人们的重视,而汽车的安全性与汽车的操纵稳定 性息息相关。 所以汽车在行驶过程中的操纵稳定性 受到人们的极大关注。 但由于受到科研成本、开发 周期等因素的影响,对汽车的各种性能的测试不可 能都用试验样车来进行,因此汽车动力学仿真技术 得到广泛应用。 本文利用动力学仿真软件 ADAMS 对汽车的操纵稳定性进行了仿真分析与评价。
基于ADAMS的汽车操纵稳定性仿真试验分析

(c ol f rnpr t n& V hc n ier g S ad n nvrt o eh o g , io2 5 9 C ia S ho o asot i T ao e ieE g ei , hn ogU iesy f c nl y Zb 5 0 , hn ) l n n i T o 4
e ut h ad n t it f t eil i eaut ojc vl. h eut so t ei e a l gs b i a b l e rsl teh n igs blyo evhc vlae betey T ersl hw ta vh l h di t it C eaa zd , l a i h es d i s h c n n a l n y n y
Ab ta t sr c:Usn y a c i lt e sf r ig d n mis s muai o wae ADAMS,te h n l g sa it efr n e o e il sa aye n ti a r v t h a di tbl p r ma c fv hce i n lzd i hs p p . n i y o e
基于ADAMSCar的悬架系统对操纵稳定性影响的仿真试验研究

引言
引言
汽车悬架系统对汽车的操纵稳定性和平顺性有着重要影响。为了更好地研究 和开发悬架系统,我们需要一个专门的试验台进行模拟测试。本次演示将介绍KC 悬架试验台的设计步骤和操纵稳定性分析方法,并通过对实验结果的分析,探讨 不同因素对操纵稳定性的影响。
设计步骤
1、平台搭建
1、平台搭建
首先需要设计并搭建一个具有高精度和高稳定性的平台,用于安装和固定汽 车悬架系统。该平台应具有足够的刚度和阻尼特性,以模拟实际行驶中的车辆振 动和冲击。
研究背景
研究背景
操纵稳定性是衡量汽车性能的重要指标之一,它直接关系到驾驶者的操控体 验和行车安全。在过去的几十年里,研究者们在悬架系统的设计方面进行了大量 的研究,从多方面提高了车辆的操纵稳定性。然而,随着汽车技术的不断发展, 人们对于车辆性能的要求也越来越高,这使得悬架系统设计面临着更加严峻的挑 战。因此,本研究旨在通过仿真试验的方法,探讨ADAMSCar悬架系统对操纵稳定 性的影响,为进一步优化悬架系统设计提供理论依据。
研究方法
此外,为了更直观地展示仿真试验结果,我们还运用MATLAB软件对试验数据 进行了可视化处理,制作了多种图表和动画,使数据的变化趋势和差异更加明显。
结果与讨论
结果与讨论
通过仿真试验和数据分析,我们发现ADAMSCar悬架系统在多种行驶工况下均 表现出较好的操纵稳定性。在高速转弯和紧急刹车等工况下,ADAMSCar悬架系统 的响应时间比传统悬架系统快20%以上,振幅和频率也有明显降低。这表明 ADAMSCar悬架系统能够更好地抑制车身侧倾和俯仰,提高车辆的操控性和安全性。
结论与展望
结论与展望
本次演示研究的汽车操纵稳定性虚拟试验系统提供了一种高度仿真的虚拟驾 驶环境,能够有效地模拟车辆在实际驾驶条件下的操控性能。通过实验验证,我 们发现虚拟试验结果与实际结果具有较高的一致性,说明虚拟试验系统可以有效 地替代传统试验方法。此外,使用虚拟试验系统还可以显著提高试验效率,减少 试验成本,这为汽车制造商优化和改进汽车操纵稳定性提供了有力的支持。
基于ADAMS_CAR对SUV整车的操纵稳定性仿真分析

·基于 ADAMS/CAR 对 SUV 整车的操纵稳定性仿真分析·
程度。
图 8 转向轻便性试验转向盘转矩时间响应
图 10 横摆角速度时间响应
图 9 转向轻便性试验转向盘转角时间响应
图 11 转向盘转角时间响应
北
从图 8 可知:转向盘最大转矩为 8.7 N·m, 3 结 论
参考 GB/ T 6323.5-94 《汽车操纵稳定性试验方
减振器阻力参数和螺旋弹簧参数由图纸得到。整
车 ADAMS/CAR 模型如图 1 所示,包括前后悬架
汽车的操纵稳定性不仅影响到汽车执行驾
车
驶员指令的准确程度,还影响汽车在受到路面
模型、转向系统模型、前后轮胎模型及车身模型。
凸凹不平或侧向力干扰时恢复自身的稳定性及
直线行驶的能力。由于汽车是一个复杂多体系
稳定性。
向盘感到过轻,会感觉“发飘”而失去“路感”难于 控制汽车的方向,从分析可知:转向盘最大作用 力和转向盘平均摩擦力都较合理,不会出现操纵 转向盘过重或过轻的感觉。
2 . 6 转向盘转角脉冲试验 主要用来评价汽车对转向输入响应的失真
程度。一般要求幅频特性曲线能平些,共振频率 较高以接近 1 Hz 为佳(必须大于 0.6 Hz),通频带 宽些,谐振峰水平(必须小于 5)较小,以保证不同 工况下失真度较小,从而获得满意的操纵性能, 同时要求相位差 (相位滞后角必须小于 80°)小 些,以保证汽车有快速灵活的反应。
特别是左转时幅频特性没有明显的峰值,这
参考文献
[1]余志生. 汽车理论[M].北京:机械工业出版社,2001. [2]石博强,等. ADAMS 基础与工程范例教程[M]. 北京:中 国铁道出版社,2007. [3]GB/T 6323.1-94,汽车操纵稳定性试验方法 蛇行试验. [4]GB/T 6323.2-94 ,汽车操纵稳定性试验方法 转向盘转 角阶跃输入. [5]GB/T 6323.3-94 ,汽车操纵稳定性试验方法 转向盘转 角脉冲输入. [6]GB/T 6323.4-94 ,汽车操纵稳定性试验方法 转向回正 性能试验. [7]GB/T 6323.5-94 ,汽车操纵稳定性试验方法 转向轻便 性试验. [8]GB/T 6323.6-94 ,汽车操纵稳定性试验方法 稳态回转 试验. [9]QC/T 480-1999 ,汽车操纵稳定性指标限值与评价方法.
基于ADAMS/Car某乘用车整车稳态回转仿真与道路试验对比分析

基于ADAMS/Car某乘用车整车稳态回转仿真与道路试验对比分析第一章:绪论车辆稳态回转是指车辆在转弯过程中,在保持速度不变的情况下,车身向心力与侧向离心力所产生的力矩达到平衡状态,从而实现稳定行驶。
稳态回转性能是乘用车安全性和驾驶体验的重要指标之一,也是车辆动力学研究的重要方向之一。
ADAMS/Car是一种广泛用于汽车动力学仿真的软件,它能够模拟车辆在各种路况和不同工作状态下的动态响应,以及车辆稳态回转性能。
本文以某乘用车为研究对象,基于ADAMS/Car软件进行整车稳态回转仿真,并与道路试验进行对比分析。
第二章:ADAMS/Car仿真模型构建首先,根据车辆技术参数,确定车辆的基本参数和动力学方程。
然后,利用ADAMS/Car软件构建乘用车的仿真模型,并进行力学系统和控制系统参数的设定。
最后,进行车辆稳态回转仿真模拟,得出车辆在稳态回转情况下的各项参数。
第三章:道路试验设计设计乘用车在实际道路上进行稳态回转试验,记录车辆在不同转角下的动态响应,包括横向加速度、横向偏差、横摆角等。
同时,记录车辆的速度、转弯半径等基本参数。
第四章:仿真与试验对比分析对比分析ADAMS/Car仿真与道路试验中得到的数据,分析模型的准确性和仿真的可靠性。
通过比较实验与仿真数据的吻合度,说明ADAMS/Car模型的可信度,并分析在不同车速和可变转弯半径条件下乘用车的稳态回转性能。
第五章:结论根据ADAMS/Car仿真与道路试验对比分析得到的详细数据,得出乘用车的稳态回转性能好坏与不同参数的关系。
针对结果对乘用车的稳定性改进提出建议。
最后,总结本文的研究意义与研究缺陷,并展望ADAMS/Car软件在车辆动力学研究中的应用前景。
基于ADAMS/Car的纯电动高空作业车操纵稳定性仿真研究

,
,
。
然 后 在 硬 点 的基 础 上 创 建 零
车底 盘 模 型 绘 制 完 之 后 装 配 液 压 升 降平 台 在 非
,
并 定 义 各 零 件 间 的运 动 关 系 确 定 约 束 类
,
型 通 过 约 束将 各零 件 连 接 起 来 得 到 前 悬 架 模 型
r
.
tr
u c
k
ha
s s
is
a n
d be
tr
s s
o
c a u s e
f
this
,
he
ta
th
c
ds
n
f im p
a n
in g h a ic
a
dlin g
c
d
s
s
b il i t y
la tio ds
n :
a
ls
o
r e s e a r c
r e n
he d in
tio n s
his pa pe
-
m o u n
te
d
m o
b ile
e
le
v a
tin
g
w o r
k p la tfo
r m
;h a n
dlin g
a n
d
s
ta
b i l i t y ;s i m
u
la tio
n
纯 电动高空 作业 车属 清 洁 能 源 的高 空 作 业 工 程 车
2
建 立 整 车模 型
表
1
举 升 平 台加 装 前 后 整 车质 量 属 性
基于ADAMS的整车操纵稳定性优化设计

图 5 为车轮在上下激振 50mm 时,车轮外倾角 的变化曲线。如图所示,平衡位置处,前轮外倾角 为-0.5 ,测试过程中,外倾角在 0.3 ~-1.7 之间变化。 车轮跳动时的外倾角变化对车辆的稳态响应特性 等有很大影响, 所以应尽量减少车轮相对车身跳动
图 5 车轮跳动-外倾角曲线
模型中各刚体之间的连接关系如下: ① 减震器上端与车身的连接点用球铰约束; ② 转向节与减震器上端用圆柱铰约束; ③ 下摆臂一端用转动铰和车身连接,另一端用 球铰和转向节连接; ④ 横拉杆用球铰和转向节连接。 仿真分析中,建立一个虚拟激振台, 设置上下激 振位移为 50mm, 以左右车轮同向上下跳动来计算 悬架跳动过程中主要性能参数的变化规律。 3.2 仿真模型并绘制测量曲线 图 4 为车轮在上下激振 50mm 时,车轮前束角 的变化曲线。如图所示,平衡位置处,前轮前束角为 0 ,测试过程中,前束角在 2.3 ~-1.4 之间变化。前 束变化的较理想特性值为: 前轮上跳时, 为零至负 前束(- 0.5 /50mm) ,所以,前束角不符合设计要求, 需要优化。
轻型汽车技术 2008(10)总 230
时的外倾角变化。为防止车轮出现过大的不足转向 或过度转向趋势, 一般希望车轮从满载位置起上下 跳动 40mm 的范围内, 车轮外倾角变化在 1 度左右。 所以,车轮外倾角基本符合设计要求,但可以进行进 一步优化。
图 6 为车轮在上下激振 50mm 时,侧倾外倾系 数的变化曲线,由曲线可知,平衡位置处,侧倾外倾 系数为 0.78,测试过程中,侧倾外倾系数在 0.69~ 0.86 之间变化。
车厢的侧倾角与侧倾力矩成正比,而侧倾力矩 又与车厢的侧倾中心高成正比,因此,侧倾中心角的 大小取决于车厢的侧倾中心高。
基于ADAMS的汽车操纵稳定性仿真试验分析
引 言
和沃尔沃等公司合作开发的轿车专用分析软件包 , 集成 了他 们 在 汽 车 设 计 、 开 发 方 面 的 专 家 经 验 ,在
干 扰而 保 持稳 定 行驶 的 能力 。 汽 车操纵稳 定性 作为汽车 动力学 的一个 重要分支 , 对 汽车 驾驶起 着 非常重 要 的作用 。在汽 车 的设计研 发过 程 中 ,对 操 纵稳 定性能 的评价 主要 采用 实车试 验评 价方 性 能参 数 【。 2 J
2 、整车模型 的建立
动力学仿真分析软件 ,它使用交互式 图形环境和零件
库 、约 束 库 、力库 ,创建 完 全参 数化 的机械 系 统几 何模
图 1整车模型 的建模 过程
型, 它对虚拟机械系统进行静力学 、 运动学和动力学分 析 ,输 出位 移 、速 度 、加速 度和 反作用 力等 曲线 , A A S软件 的仿真可用于预测机械系统的性能、 D M 运动 范围、 碰撞检测 、 峰值载荷 以及计算有限元 的输入载荷 等。它为用户提供 了强大的建模、仿真和分析功能。
F - — H-
—
} { {
一
f
ff = = 千1
{ ; j ; f { l 『
{ f { f 1 } i —
II_ ~ ’ — - -
。 一 h~
— I —~ f 一 _ 。
/ /
一 — —
汽车横摆角速度的瞬态响应 曲线如下 图 6 所示 。
r 一 一 - —} L - ’十I - 卜 Ik 一 — 十 ~}
ADAMSCAR车辆操稳性国标试验仿真设定参数
ADAMSCAR车辆操稳性国标试验仿真设定参数为了确保汽车的行驶安全性和操控稳定性,各国都制定了相应的国际标准试验来评估车辆的操稳性。
ADAMSCAR是一种常用的车辆动力学仿真软件,可以用于模拟车辆在各种情况下的行驶状况。
下面将介绍ADAMSCAR仿真设定参数的一些关键参数。
1.悬挂系统参数:悬挂系统的刚度和阻尼是影响车辆操控稳定性的重要参数。
在ADAMSCAR中,可以设置前后悬挂系统的刚度和阻尼系数,以模拟车辆在行驶过程中悬挂系统的响应。
2.轮胎参数:轮胎是车辆与地面接触的唯一部件,其性能对车辆的操控稳定性有很大影响。
在ADAMSCAR中,可以设置轮胎的摩擦系数、刚度和阻尼等参数,以模拟轮胎在不同路面和行驶状况下的转向性能和抓地力。
3.动力系统参数:动力系统的性能也会对车辆的操控稳定性产生影响。
在ADAMSCAR中,可以设置发动机的输出扭矩和转速曲线,以及传动系统的传动比和换挡速度等参数,以模拟车辆在加速、减速和换挡等情况下的动力响应。
4.车辆结构参数:车辆的结构刚度和质量分布也会对车辆的操控稳定性产生影响。
在ADAMSCAR中,可以设置车辆的结构刚度、质量分布和悬挂系统的几何尺寸等参数,以模拟车辆在转弯、制动和通过障碍物等情况下的动力学响应。
除了上述参数外,还可以根据需要设置其他一些参数,如车辆的空气动力学特性、制动系统的性能和车辆的转向系统等。
这些参数的设定需要根据具体的国际标准试验要求和车辆的实际情况进行调整和优化。
需要注意的是,ADAMSCAR仿真只是一个辅助工具,实际的车辆操控稳定性还需要通过道路试验和真实行驶来验证。
因此,在进行ADAMSCAR 仿真时,需要理解并合理设置各种参数,以尽可能准确地模拟车辆的行为和响应。
同时,还需要结合其他方法和工具,如实车试验和数据分析等,来综合评估车辆的操控稳定性。
基于ADAMS的整车建模和操纵稳定性仿真评价

基于ADAMS的整车建模和操纵稳定性仿真评价
基于ADAMS的整车建模和操纵稳定性仿真评价
利用动力学仿真软件ADAMS完成了某车型多体动力学建模和操纵稳定性分析.以多连杆式独立悬架子系统建模为例介绍在ADAMS/Car模块中建立汽车多体动力学模型要点和过程:对虚拟样车进行了转向盘角阶跃输入性能、蛇行性能、转向轻便性等操纵稳定性能试验仿真.结果表明,该车型具有良好的操纵稳定性.
作者:冯樱郭一鸣郑冬黎陆通 Feng Ying Guo Yiming Zheng Dongli Lu Tong 作者单位:湖北汽车工业学院,汽车工程系,湖北,十堰,442002 刊名:湖北汽车工业学院学报英文刊名:JOURNAL OF HUBEI AUTOMOTIVE INDUSTRIES INSTITUTE 年,卷(期):2009 23(3) 分类号:U461.6 TP391.9 关键词:操纵稳定性仿真虚拟样机 ADAMS。
基于ADAMS-Car的悬架系统对操纵稳定性影响的仿真试验研究

基于ADAMS-Car的悬架系统对操纵稳定性影响的仿真试验研究基于ADAMS/Car的悬架系统对操纵稳定性影响的仿真试验研究摘要:本文旨在通过基于ADAMS/Car的仿真试验研究,探究悬架系统在车辆操纵稳定性中的重要作用。
通过建立车辆运动学模型,对不同类型的悬架系统进行仿真试验,并通过对比分析车辆的操纵稳定性指标,验证悬架系统对操纵稳定性的影响。
研究结果表明,悬架系统的合理设计和优化将对加强车辆操纵稳定性起到积极的促进作用。
1. 引言近年来,随着汽车工业的迅速发展和人们对汽车操纵稳定性要求的提高,研究车辆悬架系统对操纵稳定性影响的相关工作逐渐受到关注。
悬架系统作为汽车的重要组成部分之一,对车辆的操纵稳定性具有重要作用。
因此,对悬架系统的研究和优化成为提高汽车操纵稳定性的重要途径。
2. 研究方法本研究基于ADAMS/Car软件平台,通过建立车辆运动学模型,对不同类型的悬架系统进行仿真试验。
选择不同类型的悬架系统,包括麦弗逊悬架、双叉臂悬架和多连杆悬架,并设置不同的参数和工况条件。
通过仿真得到车辆在不同悬架系统下的操纵稳定性指标,如转向稳定性、车身横摆角速度等。
3. 仿真结果与分析通过对比分析不同悬架系统下的操纵稳定性指标,得出以下结论:3.1 麦弗逊悬架系统麦弗逊悬架系统是目前应用最广泛的一种悬架系统,其结构简单、制造成本低廉。
在仿真试验中,麦弗逊悬架系统表现出良好的转向稳定性和车身横摆角速度,符合实际驾驶需求。
3.2 双叉臂悬架系统双叉臂悬架系统相对于麦弗逊悬架系统而言,在高速行驶时具有更好的操纵稳定性,能够有效减少车身的横摆角速度。
然而,双叉臂悬架系统的制造和维修成本较高,对汽车的舒适性有所影响。
3.3 多连杆悬架系统多连杆悬架系统在操纵稳定性方面表现出色,能够有效减少车身的横摆角速度,提高转向稳定性。
然而,多连杆悬架系统结构较为复杂,对制造工艺和技术要求较高。
综合上述结果,不同类型的悬架系统对操纵稳定性影响明显,麦弗逊悬架系统在转向稳定性方面表现稳定,而双叉臂悬架和多连杆悬架系统在横摆角速度方面表现较好。
运用ADAMS做车辆的操作稳定性实验

,,,,,,,,,,,,,,,-./0123.4567128907:/3;/’收稿日期(!""#"F"!E 王树凤$北京清华东路#F 号中国农业大学&东校区’!#G 信箱$#""")G摘要介绍了应用8H 8IJ K 520软件建立的车辆模型$对其内部控制机理进行了分析L 设计了测试车辆操纵稳定性的蛇行线试验$并对该试验过程进行仿真和数据处理L 仿真结果表明$利用8H 8IJ 软件技术$可在产品开发阶段对车辆性能进行分析预测$达到优化产品设计方案的目的L 关键词多体动力学M 8H 8IJ K 520M 操纵稳定性试验中图分类号N O GP #Q P B R S T U VW T X Y Z [\]^_R X T ‘R V Y a b W R c T d \R e S T V UA B A CDf219J 6/4>19g 6219-/1@./h /i /1&5.33>9>.4j >67:3>k 1971>>0719$58<’A l S Y X [d Y N 6>=>67:3>m .n >3/?7198H 8IJ K 520:0>2;>n7?470?;71;0.n /:>n $o 67:671:3/n >??/?p >1?7.1$?;>>0719?/q ?@?;>m $;70>?$:62??7?$>;:r N 6>:3.?>s 3..p:.1;0.3m >:6217?m .48H 8IJ K 5207?2123@t >n r u >:2/?>;6>p @3.1:./0?>?323.m >v p >07m >1;7?.1>.4;6>7m p .0s;21;:3.?>s 3..p 621n 3719s ?;2q 737;@>v p >07m >1;$;6>p @3.1:./0?>?323.m >v p >07m >1;7?n >?791>n /?719;6>:.1;0.3473>?r u 2?>n.1;6>0>?/3;.42123@?7?$;6>:/0=>?.4p 202m >;>0?20>p 3.;;>nr <?7198H 8IJ?.4;o 20>:21?791747:21;3@0>n /:>p 0.n /:;n >=>3.p m >1;:@:3>?r w R xy a X z S m /3;7s q .n @n @12m 7:M 8H 8IJ K 520M 621n 371921n?;2q 737;@>v p >07m >1;在汽车的设计开发过程中$对操纵稳定性能的评价主要采用试验评价方法$需经过多次样车试制和反复试验$花费的人力{物力{财力较大$且设计周期较长L 采用8H 8IJ 软件建立的参数化车辆模型$在产品开发阶段$可利用仿真分析结果对设计参数不断进行修改$优化产品设计方案$降低成本{缩短设计周期|#*G }L 利用8H 8IJ K 520可以建立精确的整车虚拟样机$从而准确地模拟汽车操纵稳定性{乘坐舒适性{安全性及其他各项性能试验$同时可以比较容易地创建仿真试验过程$或者根据数据再现试验事件L文中详细介绍了利用520模块建立的某种车辆的参数化模型$分析了闭环分析的控制机理$以蛇行线试验为例$说明了试验的设计方法$并对仿真结果进行了分析L~整车模型的建立整车模型包括发动机{悬架系统{转向系统{制动系统{轮胎等子系统L 8H 8IJ K 520提供了良好的建模环境(标准模式和模板建模器L 在标准模式中$用户可以利用或修改已有的子系统模板来建立整车模型的参数化数字样机L 如果没有合适的模板$则可利用模板建模器调用零件库中的标准零件或使用自定义的零件建造用户自己的模板!对整车性能进行分析"不仅需要整车模型"而且需要选择合适的实验装配方案#$%&$’()*"+,+-.中提供了/种试验装配方案"其中-,0,1023143.4105主要用于开环分析6准静态分析和+,+-.7,’(8%’分析9-,0.,043.4105可用于开环分析6准静态分析和闭环分析!本试验使用的整车模型是按实车结构建模的"对一些重要参数#如轴距6轮距6弹簧刚度6减振器阻尼系数等*采用参数化建模"若仿真结果不理想"则可及时调节参数进行优化!该模型主要由双连杆滑柱式前后悬架结构6齿轮齿条转向结构6四轮制动6刚性底盘体结构等组成"装配方案选用-,0.,0 43.4105"系统共有:;<个自由度!=闭环试验分析+,+-.7>?’提供了开环分析6准静态分析和闭环分析"其中开环分析和准静态分析只需在用户界面上输入需要的参数"闭环分析比开环分析和准静态分析复杂"不易控制"需要提供分析时所需的控制文件!本文中只对闭环分析进行讨论!双可控车的"使流D(H%的以,’(8%’I($%与+,+-.7,’(8%’使用相同的控制策略"但+,+-.7,’(8%’I($%更加灵活"可以根据具体要求创建物理试验过程!而+,+-.7,’(8%’具有学习和适应特定车辆特性#车辆的侧向性能6径向性能6基本性能以及极限性能*的能力"也可把学习到的知识保存供以后使用"具有一定的智能性!表:闭环分析时的控制设置控制方式算法模型主要参考文件机器控制#-?C J(G%>F G$’F H*+,+-.7,’(8%’I($%#缺省驾驶员模型*#@A B C B*文件"包含了车辆控制方式以及行驶轨迹驾驶员控制#K L M?G>F G$’F H*+,+-.7,’(8%’#驾驶员模型*#@A B’(*文件"包含径向6侧向6制动6转向等控制参数/N中国农业大学学报/;;:年!"驾驶员控制的数据文件#$%&’(%)*+,%*-$.,./&-(012343"5驾驶员控制的数据文件包含$%&’(%4*+,%*-/&-(所需的数据5该文件设定了车辆行驶轨迹的坐标数据5通过文件中的6788$)9:;<9=和6;88<>:?)9:;<9=属性来设置控制方式5此文件必须与$%&’(%4*+,%*-/&-(一起使用5@"驾驶员输入文件#$%&’(%>+A B ,C &-(0123&+"5驾驶员输入文件指定了D $D E6F $%&’(%模块所需的各种控制参数的数值0如径向动态特性G 侧向动态特性0车辆结构特性以及学习文件的控制参数等0用来指导整车分析5模型数据集文件#D $D E63.,.H (,/&-(12.3I "为汽车的模型数据集文件0包含车辆结构信息G 分析请求G 输出结果设置等信息J 命令文件#D $D E64*I I .+3/&-(12.4/"是执行不同分析的命令集5D $D E6F ).%求解器根据用户的输入及控制文件进行闭环分析0通过不断反馈调整0达到设计要求5在输出文件中0包含了图形文件和数据文件0用于仿真分析G 曲线作图G 动画制作等5K 蛇行线试验的设计及仿真蛇行线试验是评价汽车操纵稳定性的重要试验0可以考核汽车在接近侧滑或侧翻工况下的操纵性能0综合评价汽车行驶稳定性及乘坐舒适性5本文中就以蛇行线试验为例来说明如何设计试验5K L M 试验设计在试验场地上布置标桩N O 根0根据蛇行线试验基准0标桩间距为@O I #图!"0基准车速为P Q R I S T U N0试验车速V N 0V !0W0其中V N 近似为NF !基准车速0最高车速以能保证试验安全为原则自行选定0但不超过X O R I S T U N5准备工作结束后便可进行试验0试验时驾驶员操纵汽车以选择好的车速通过标桩区0通过控制方向盘输入使车辆沿着蛇行线的试验路线来行驶Y Z [5驾驶员控制文件设置设置参数具体设置速度F #R I S T U N"@Q 0Z Q 0Q Q 0P Q 0\Q 试验道路长度F I @!O 试验结束条件距离控制输入激励方向盘转角转向G油门机器控制换挡G离合开环控制本试验选用机器控制0即使用缺省的驾驶员模型5由闭环控制分析机理可知0控制文件为1234/和123435根据蛇行线试验的方法0控制文件如下5N "驾驶员控制文件#1234/"]采用机器控制方式#ED )^>:8)9:;<9="0主要设置参数见表!5!"驾驶员控制数据文件#12343"]驾驶员控制数据文件是为驾驶员控制文件服务的0由表!可见0试验的输入激励为方向盘转角0因此可通过方向盘转角和速度控制车辆行驶0行驶轨迹@X 第P 期王树凤等]应用D $D E6设计车辆操纵稳定性试验以!"#数字坐标的形式给出$图%&’()*仿真分析仿真结果见图+’图+$,&为车辆侧偏位移的变化’可见"车辆行驶轨迹与设计的试验轨迹基本一致"系统具有良好的追随性能’图+$-&为仿真过程中方向盘转角.横摆角速度.侧向加速度的变化趋势"其变化情况为正弦波的形状"这与实车试验中的变化情况相吻合’年。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
转向盘 Road D Driver C
Ramp S End Tim Number Initial V Gear Ramp Start Ti Steering Cruise C
蛇形 Road Data File Driver Control Files
File Driven …/pylon_course.xml
N400 5.2553 3.7996
CN100_coil_gvw 7.1071 6.1973
Entry Distance Settle Time 转向回正性能(高速) Output Step Size Gear Turn Direction Steady-State Prephase Lateral Acceleration Longitudinal Velocity Quasi-Static Skidpad Setup Entry Distance Settle Time 转向轻便性 Road Data File Driver Control Files 稳态回转 Output Step Size Gear Turn Radius Turn Direction Control Duration of maneuver Initial Velocity Final Velocity Shift Gears Quasi-Static Straight-Line Setup 转向盘中间位置操纵稳定性 End Time Number of Steps Initial Velocity Gear Initial Steer Value Maximum Steer Value Maximum Frequency Frequency Rate Start Time Steeing Input Cruise Control Quasi-Static Straight-Line Setup
File Driven ../N400_on_center_pylon_course_20110224.xml
100 10000 100 km/hr 3 1 0 Angle Yes
7.8553 10.6053 5.5996 7.4996
13.3553 9.6996
16.2553 12.1996
CN100_coil_gvw 10.8071 14.6071 9.3973 12.9973
18.5071 16.7973
22.7 10版ADAMS 21 05版ADAMS
r_effective.xml
27.77778
Hale Waihona Puke 转向盘转角阶跃输入 End Time Number of Steps Initial Velocity Gear Initial Steer Value Final Steer Value Step Start Time Duration of Step Steering Input Cruise Control 转向盘转角脉冲输入 End Time Number of Steps Initial Velocity Gear Maximum Steer Value Cycle Length Start Time Steering Input Cruise Control Quasi-Static Straight-Line Setup 转向回正性能(低速) Output Step Size Gear Turn Direction Steady-State Prephase Radius Longitudinal Velocity Quasi-Static Skidpad Setup
Initial S Final St Step Sta Duratio Steering Cruise C
转向盘 End Tim Number Initial V Gear Maximu Cycle L Start Ti Steering
Gear Turn Di SteadyLateral Longitu Quasi-S Entry D Settle T
Step Steer 5 500 100km/hr 3 0 From Ramp Steer0.1,0.15,0.2,0.25,0.3g 1 0.1 Angle Yes Impulse Steer 5 2000 100km/hr 5 45 0.5 1 Angle Yes Yes Cornering with Steer Release 0.01 3 Left / Right Radius and Velocity 15m 7.7m/s no
转向轻 Road D Driver C
稳态回 Output Gear Turn Ra Turn Di Control Duratio Initial V Final V Shift Ge Quasi-S
转向盘 End Tim Number Initial V Gear Initial S Maximu Maximu Frequen Start Ti Steeing Cruise C Quasi-S
国标 序号 1 2 3 4 5 6 7
试验名称 蛇形 转向盘转角阶跃输入 转向盘转角脉冲输入 转向回正性能 转向轻便性 稳态回转 转向盘中间位置操纵稳定性
适用范围
试验汽车载荷状态
额定最大装载质量 额定最大装载质量和轻载 额定最大装载质量
M、N、G类车辆
二轴M、N、G类车辆 额定最大装载质量和轻载 额定最大装载质量 M1、N1类车辆
转向盘中间位置操纵稳定性 Road Data File Driver Control Files Ramp Steer End Time Number of Steps Initial Velocity Gear Ramp Start Time Steering Input Cruise Control
20m 20 Cornering with Steer Release 0.01 3 Left / Right Acceleration and Velocity 2 m/s^2 100 km/hr no 100m 10 File Driven mdids://N400_Final/driver_controls.tbl/steer_effective.xml Constant Radius Cornering 0.01 3 30 m Left Velocity 27 1 m/s 7.75m/s no yes Swept-Sine Steer 100 10000 100km/hr 5 0 10.6053 0.2 1 0 Angle yes yes